_Constantinou_Generalis.png)

A Decoupling Method for Successive Robot Rotation Based on Time Domain Instantaneous Euler Angle
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Introduction of the Basic Principles of Euler Angle Decoupling
2.1. Introduction of the Conventional Euler Angle
2.2. Introduction of Reciprocal Product Principle
2.3. Solution of the Coordinate Axis for the Final Rotation State
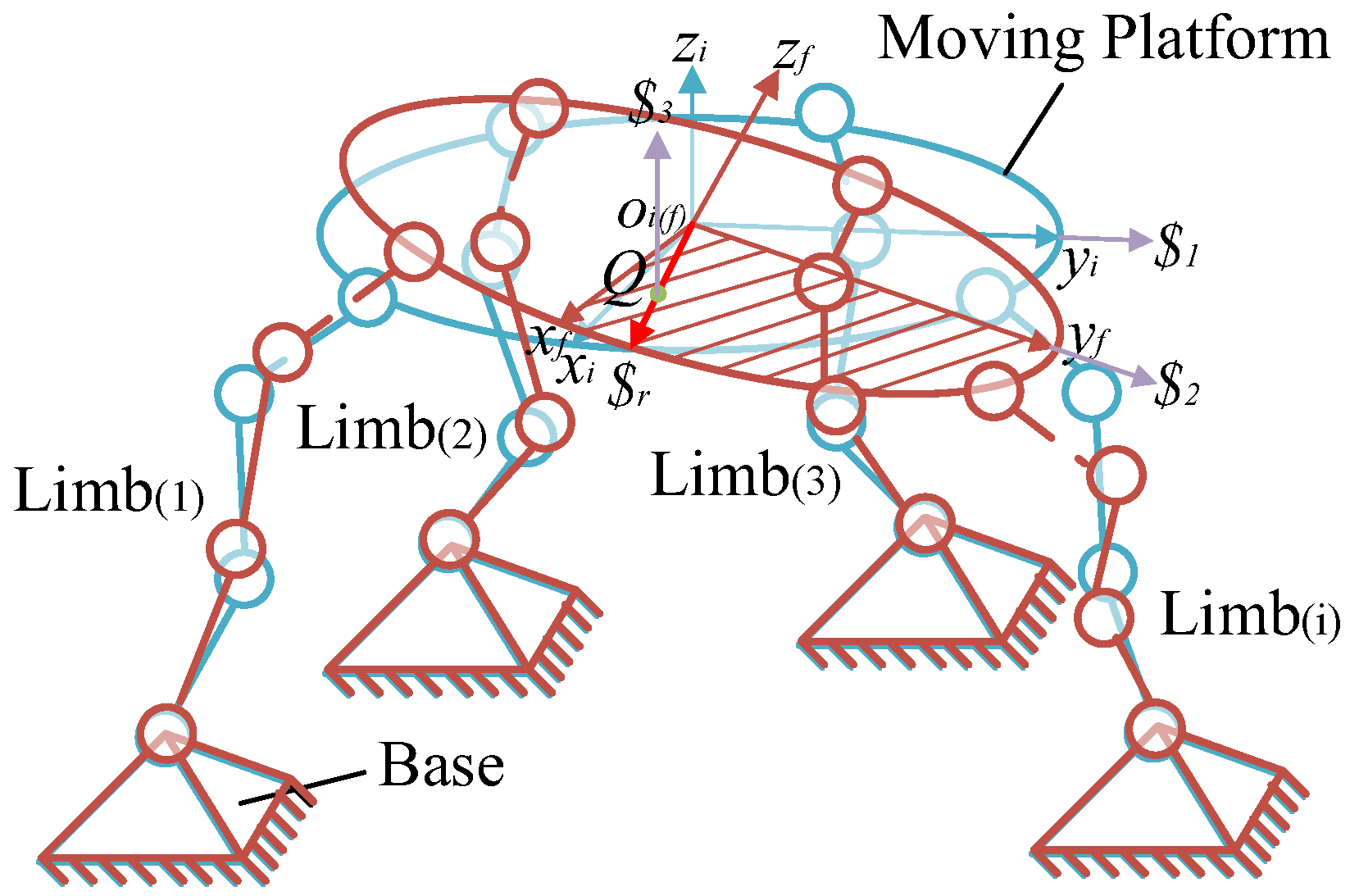
3. Instantaneous Euler Angle of a General Parallel Mechanism
3.1. Assumptions
- The three rotational DOFs of the general parallel mechanism are considered, and the other three translational DOFs are not considered;
- The rotation of the moving platform is continuous, and the singularities within the cycle are neglected;
- The rotation of the moving platform is a purely rigid rotation; any elastic deformation or micro-displacement is not taken into consideration.
3.2. Solution for Each Ridge Axis
4. Discussion of the Intrinsic Relationship between the Conventional Euler Angle and the Instantaneous Euler Angle
4.1. Z-Y-Z Euler Angle (Φ, θ, and φ)
4.2. Z-Y-X Euler Angle (α, β, γ)
5. Application of the Instantaneous Euler Angle
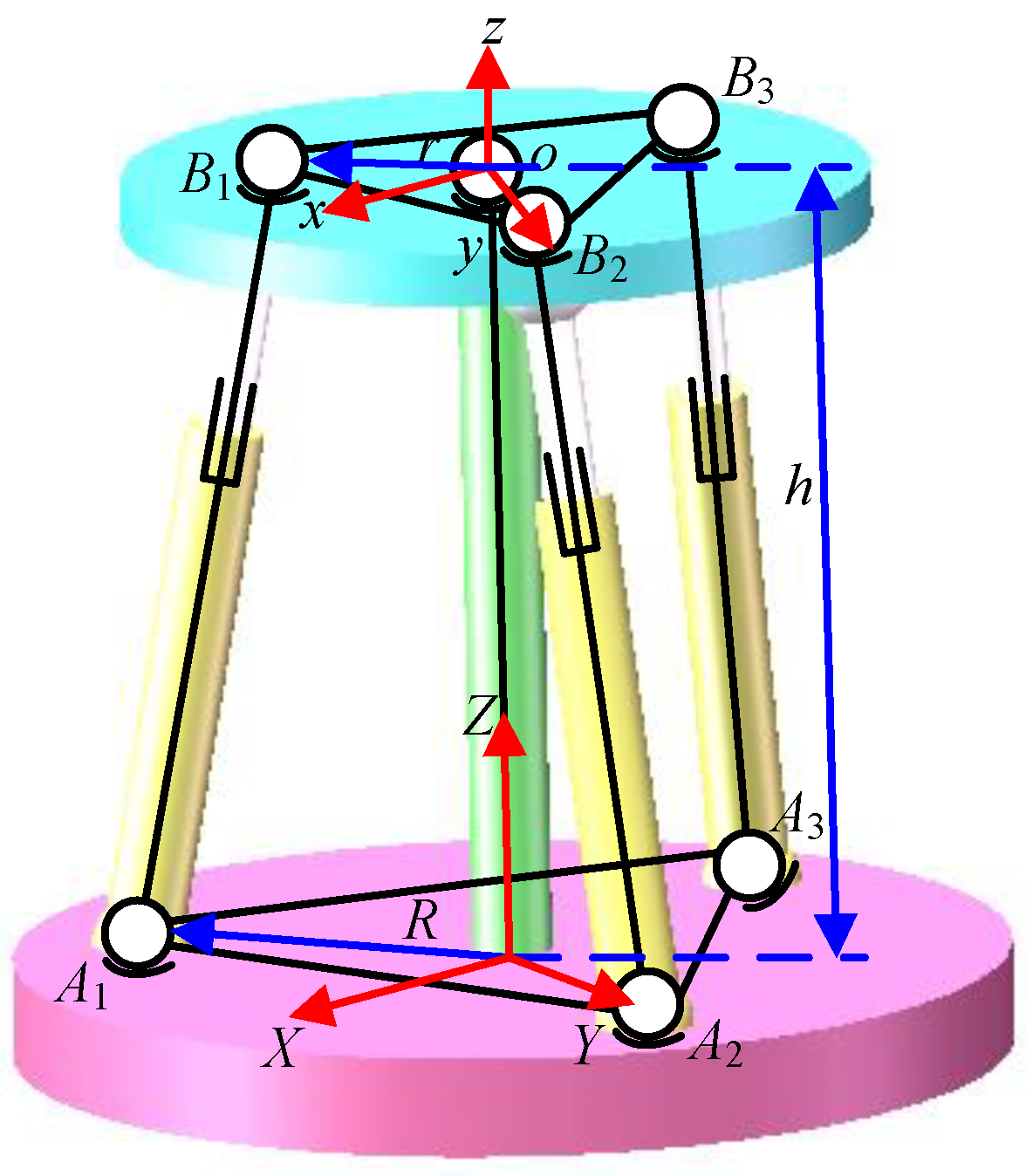
5.1. 3-sps-s Parallel Mechanism
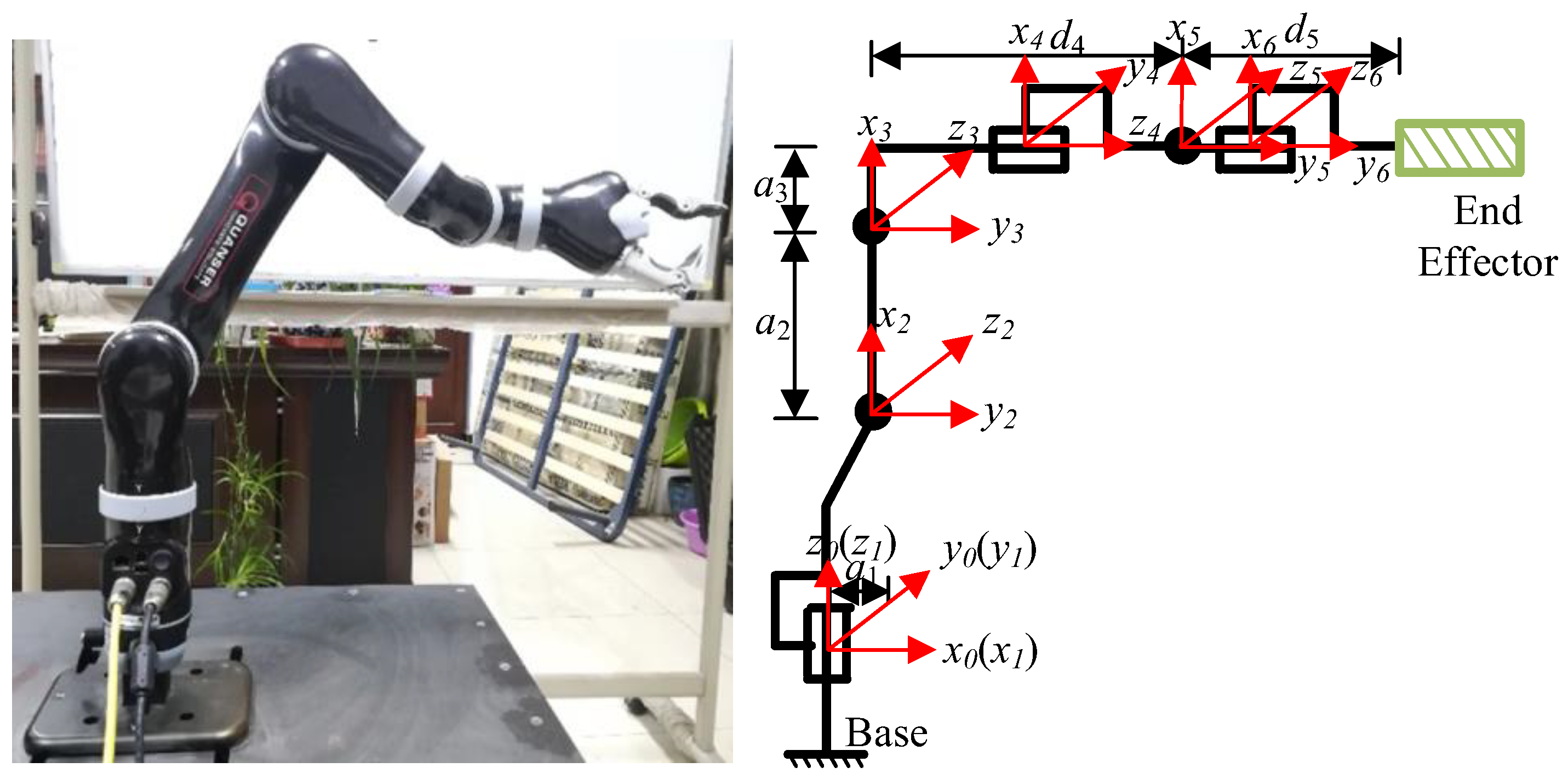
5.2. 6-DOF Robotic Arm
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, K.; Jiang, H.; Wang, S.; Yu, J. A soft robotic fish with variable stiffness decoupled mechanisms. J. Bionic Eng. 2018, 15, 599–609. [Google Scholar] [CrossRef]
- Abduh, W.; Berhouet, J.; Samargandi, R.; Favard, L. Clinical results and radiological bony adaptations on a cementless short-stem prosthesis-a comparative study between anatomical and reverse total shoulder arthroplasty. Orthop. Traumatol. Surg. Res. 2022, 108, 103262. [Google Scholar] [CrossRef] [PubMed]
- Acar, O.; Şaka, Z.; Özçelik, Z. Parametric Euler-Savary Equations for Spherical instantaneous Kinematics, Mechanisms and Machine Science; Springer: Berlin/Heidelberg, Germany, 2019; pp. 347–356. [Google Scholar]
- Balakina, E.A.; Kuznetsov, E.B. On the numerical integration of the Euler kinematic Equations. Comput. Math. Math. Phys. 2001, 41, 1623–1629. [Google Scholar]
- Li, K.; Zhang, Y.; Zhan, H.; Du, Y.; Lü, C. Vibrational characteristics of rotating soft cylinders. Sci. China-Phys. Mech. Astron. 2021, 64, 254611. [Google Scholar] [CrossRef]
- Giulietti, F.; Tortora, P. Optimal Rotation Angle about a Nonnominal Euler Axis. J. Guid. Control. Dyn. 2007, 30, 1561–1563. [Google Scholar] [CrossRef]
- Lovera, M.; Astolfi, A. Spacecraft Attitude Control Using Magnetic Actuators. Automatica 2004, 40, 1405–1414. [Google Scholar] [CrossRef]
- Araromi, O.A.; Gavrilovich, I.; Shintake, J.; Rosset, S.; Richard, M.; Gass, V.; Shea, H.R. Rollable Multisegment Dielectric Elastomer Minimum Energy Structures for a Deployable Microsatellite Gripper. IEEE/ASME Trans. Mechatron. 2014, 20, 438–446. [Google Scholar] [CrossRef]
- Zhu, T.; Liu, Y.; Li, W.; Li, K. The quaternion-based attitude error for the nonlinear error model of the INS. IEEE Sens. J. 2021, 21, 25782–25795. [Google Scholar] [CrossRef]
- Shuster, M.D.; Oh, S.D. Three-Axis Attitude Determination from Vector Observation. J. Guid. Control Dyn. 1981, 4, 70–77. [Google Scholar] [CrossRef]
- Ershkov, S.V. New exact solution of Euler’s Equations (rigid body dynamics) in the case of rotation over the fixed point. Arch. Appl. Mech. 2014, 84, 385–389. [Google Scholar] [CrossRef]
- Behal, A.; Dawson, D.; Zergeroglu, E.; Fang, Y. Nonlinear Tracking Control of an Underactuated Spacecraft. J. Guid. Control. Dyn. 2002, 25, 979–985. [Google Scholar] [CrossRef]
- Baoyin, H.; Yin, M. Review on time-optimal reorientation of agile satellite. J. Dyn. Control 2020, 18, 1–11. (In Chinese) [Google Scholar]
- Bonev, I.A.; Gosselin, C. Advantages of the modified euler angles in the design and control of PKMs. In Proceedings of the 2002 Parallel Kinematic Machines International Conference, Montreal, QC, Canada, 23–25 April 2002; pp. 171–188. [Google Scholar]
- Taunyazov, T.; Rubagotti, M.; Shintemirov, A. Constrained orientation control of a spherical parallel manipulator via online convex optimization. IEEE/ASME Trans. Mechatron. 2017, 23, 252–261. [Google Scholar] [CrossRef]
- Cao, Z.; Qin, C.; Fan, S.; Yu, D.; Wu, Y.; Qin, J.; Chen, X. Pilot study of a surgical robot system for zygomatic implant placement. Med. Eng. Phys. 2020, 75, 72–78. [Google Scholar] [CrossRef] [PubMed]
- Feng, Y.; Fan, J.; Tao, B.; Wang, S.; Mo, J.; Wu, Y.; Liang, Q.; Chen, X. An image-guided hybrid robot system for dental implant surgery. Int. J. Comput. Assist. Radiol. Surg. 2022, 17, 15–26. [Google Scholar] [CrossRef]
- Hu, H.; Cheng, J.; Niu, Z. Analysis on obstacle-surmounting of coal mine detection robot based on RPY. J. Coal Mine Mach. 2013, 34, 109–111. [Google Scholar]
- Wei, L.; Toby, H.; Jorge, A. On the use of the dual euler-rodrigues parameters in the numerical solution of the inverse-displacement problem. Mech. Mach. Theory 2018, 125, 21–33. [Google Scholar]
- Yazell, D. Origins of the unusual space shuttle quaternion definition. In Proceedings of the 47th American Institute of Aeronautics and Astronautics, Orlando, FL, USA, 5–9 January 2009; Volume 43, pp. 1–6. [Google Scholar]
- Wang, X.; Yu, C.; Lin, Z. A dual quaternion solution to attitude and position control for rigid-body coordination. IEEE Trans. Robot. 2012, 28, 1162–1170. [Google Scholar] [CrossRef]
- Biswal, P.; Mohanty, P.K. Development of quadruped walking robots: A review. Ain Shams Eng. J. 2021, 12, 2017–2031. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Zhang, C.; Esakki, B. Desired tracking of delayed quadrotor UAV under model uncertainty and wind disturbance using adaptive super-twisting terminal sliding mode control. ISA Trans. 2022, 123, 455–471. [Google Scholar] [CrossRef]
- Hua, C.C.; Wang, K.; Chen, J.N.; You, X. Tracking differentiator and extended state observer -based nonsingular fast terminal sliding mode attitude control for a quadrotor. Nonlinear Dyn. 2018, 94, 343–354. [Google Scholar] [CrossRef]
- Khoder, W.; Fassinut-Mombot, B.; Benjelloun, M. Inertial navigation attitude velocity and position algorithms using quaternion scaled unscented kalman filtering. In Proceedings of the IEEE Industrial Electronics, Orlando, FL, USA, 10–13 November 2008; pp. 754–759. [Google Scholar]
- Luo, J.; Wei, C.; Dai, H.; Yin, Z.; Wei, X.; Yuan, J. Robust inertia-free attitude takeover control of post capture combined spacecraft with guaranteed prescribed performance. ISA Trans. 2018, 74, 28–44. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Yao, J.; Xu, Y.; Duan, Y.; Hou, Y.; Zhao, Y. The Internal Relations of the Pose Description Methods of the Rigid Body after Two Successive Rotations. J. Mech. Eng. 2015, 51, 86–94. [Google Scholar] [CrossRef]
- Zhen, H.; Yanwen, L.; Feng, G. The expression of the orientation of a spatial moving unit by Euler angle. J. Yanshan Univ. 2002, 26, 189–192. [Google Scholar]
- Qu, S.; Li, R.; Bai, S. Type Synthesis of 2T1R Decoupled Parallel Mechanisms Based on Lie Groups and Screw Theory. Math. Probl. Eng. 2017, 2017, 8304312. [Google Scholar] [CrossRef]
- Kong, X.W.; Gosselin, C.M. Type Synthesis of Input-Output Decoupled Parallel Manipulators. Trans. Can. Soc. Mech. Eng. 2004, 28, 185–196. [Google Scholar] [CrossRef]
- Li, C.; Guo, H.; Tang, D. Cell division method for mobility analysis of multi-loop mechanisms. Mech. Mach. Theory 2019, 141, 67–94. [Google Scholar] [CrossRef]
- Li, W.; Gao, F.; Zhang, J. A Decoupled Parallel Manipulator only with Revolute Joints. Mech. Mach. Theory 2005, 40, 467–473. [Google Scholar] [CrossRef]
- Liu, X.; Wu, C.; Wang, J.; Bonev, I. Attitude description method of [PP]S type parallel robotic mechanisms. Chin. J. Mech. Eng. 2008, 44, 19–23. [Google Scholar] [CrossRef]
- Jack, P. Freedom in Machinery; Cambridge University Press: Sydney, Australia, 1900; pp. 1–30. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X.; Zhu, J. A Decoupling Method for Successive Robot Rotation Based on Time Domain Instantaneous Euler Angle. Mathematics 2023, 11, 3882. https://doi.org/10.3390/math11183882
Zhou X, Zhu J. A Decoupling Method for Successive Robot Rotation Based on Time Domain Instantaneous Euler Angle. Mathematics. 2023; 11(18):3882. https://doi.org/10.3390/math11183882
Chicago/Turabian StyleZhou, Xin, and Jianxu Zhu. 2023. "A Decoupling Method for Successive Robot Rotation Based on Time Domain Instantaneous Euler Angle" Mathematics 11, no. 18: 3882. https://doi.org/10.3390/math11183882
APA StyleZhou, X., & Zhu, J. (2023). A Decoupling Method for Successive Robot Rotation Based on Time Domain Instantaneous Euler Angle. Mathematics, 11(18), 3882. https://doi.org/10.3390/math11183882