


Anomaly Detection of Underground Transmission-Line through Multiscale Mask DCNN and Image Strengthening


Abstract
1. Introduction
- The preprocessing phase improves the performance of the segmentation of UTLCs in a thermal image statistical image strengthening by employing two key features. Specifically, z-score normalization improves the robustness of feature extraction for UTLCs and reduces the noise in a thermal image. BHEPL improves the accuracy of segmentation for UTLCs.
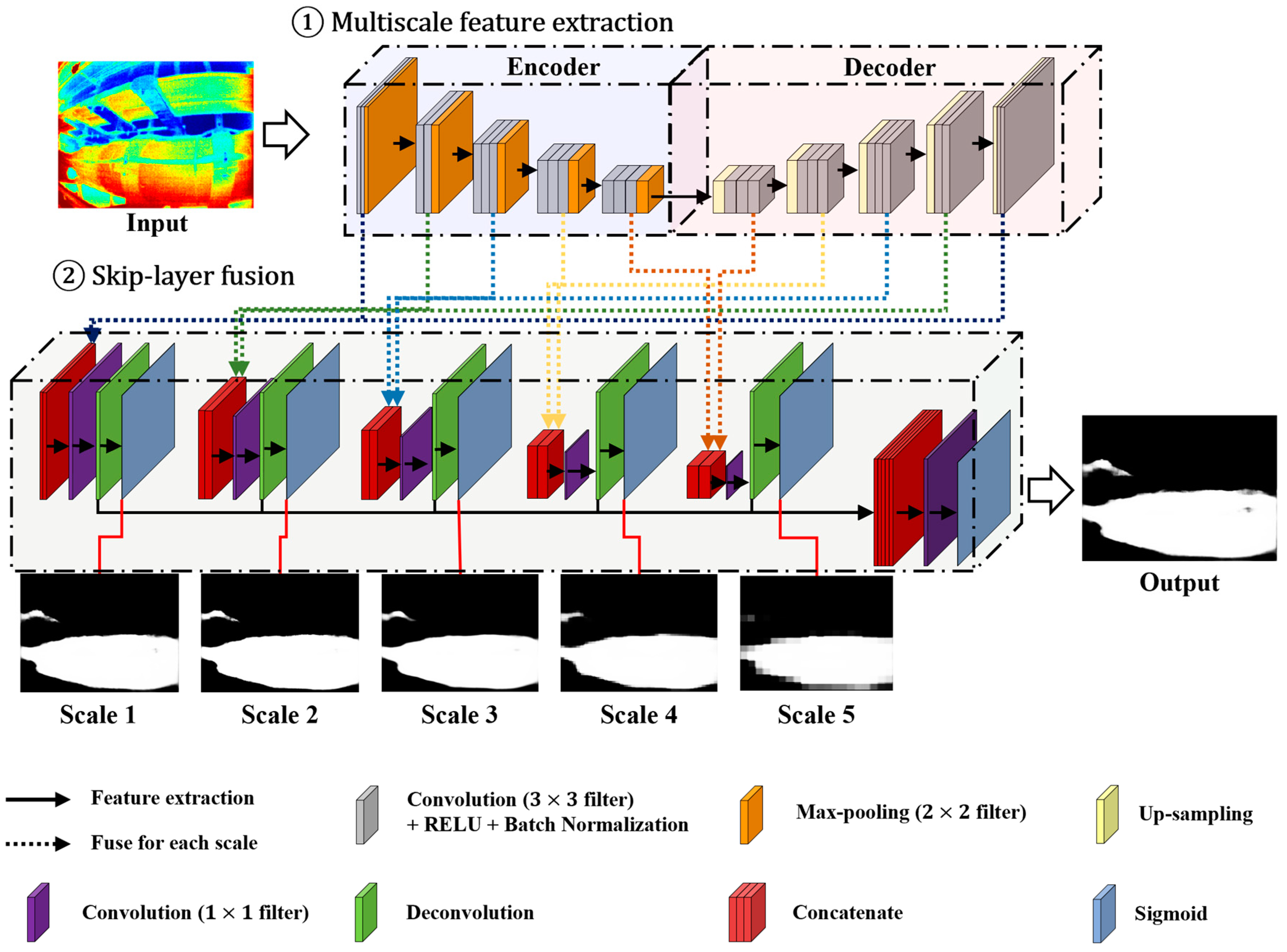
- Automatic separation was achieved through the MS mask DCNN, which incorporates two key characteristics: a multiscale feature extraction module and a skip-layer fusion module. The multiscale feature extraction module enables the extraction of distinctive features from UTLCs and their environments, whereas the skip-layer fusion module combines these features extracted from the multiscale feature extraction module.
- The anomaly detection phase addressed the problem of false segmentation of UTLCs when detecting anomalies with fast yet accurate post-processing methods. Specifically, the contour method can eliminate false segmentation of UTLCs with low computational cost, whereas the unsupervised clustering method of DBSCAN eliminates noise from thermal reflection, securing high accuracy and robustness in field applications.
- Intensive field tests demonstrate the effectiveness of the proposed framework in real-world applications. Moreover, implementation of the half tensor during testing noticeably improved the framework’s inference time, demonstrating its suitability for practical field applications.
2. An Integrated Framework of Anomaly Detection
2.1. Phase A Image Preprocessing and Statistical Image Strengthening
2.2. Phase B Multi-Scale Mask Deep Convolution Neural Network
2.3. Phase C Anomaly Detection of Transmission Line
3. Experiments
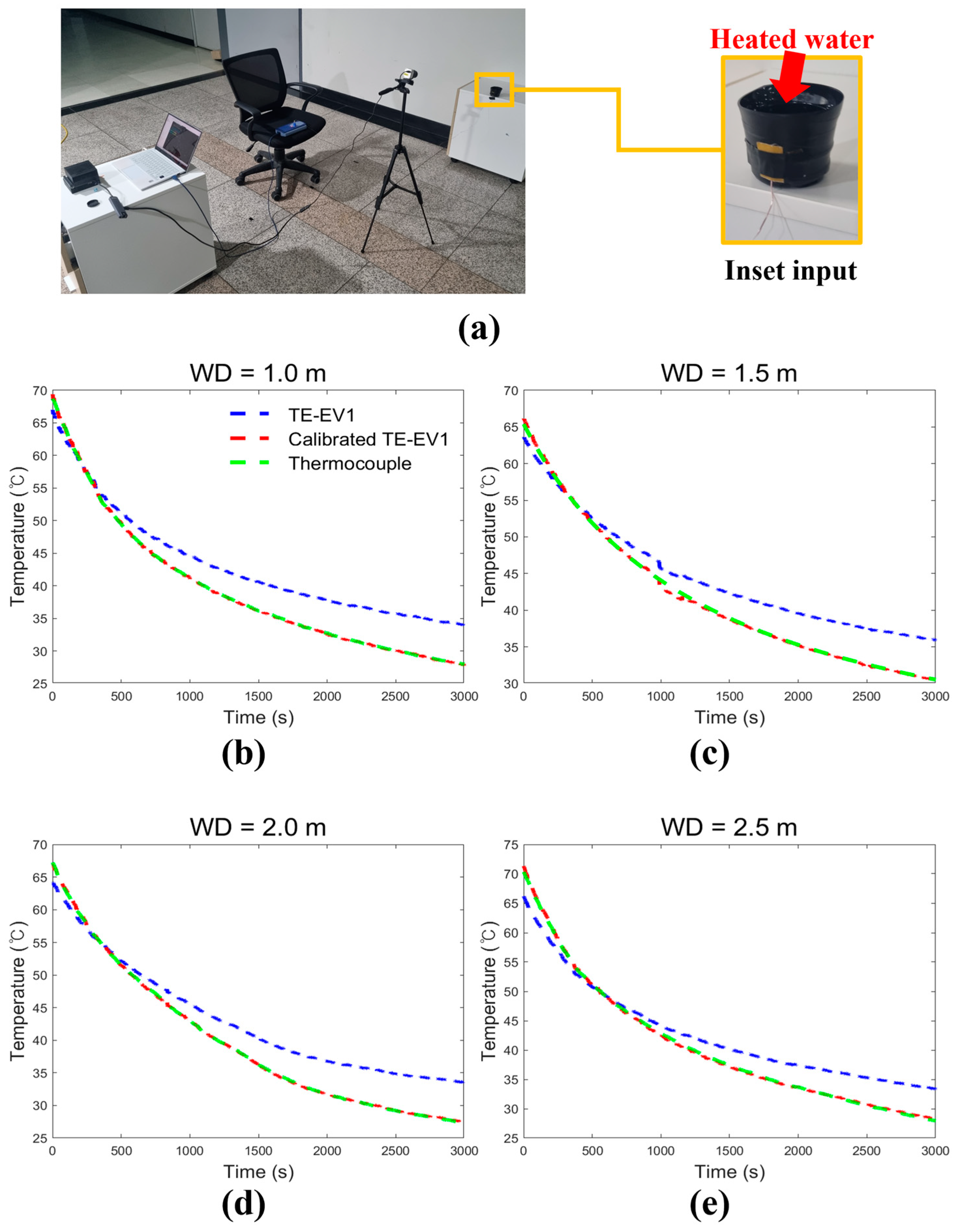
3.1. Calibration of IR Camera
3.2. Thermal Diagnosis System
3.3. Field Experiments
3.4. Construction of MS Mask DCNN
4. Results and Discussion
4.1. Results of Each Phase from the Proposed Integrated Framework
4.2. Ablation Study for the Proposed Framework
4.3. Contribution of the Contour Method and Half Tensor
4.4. Anomaly Detection
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Aras, F.; Alekperov, V.; Can, N.; Kirkici, H. Aging of 154 kV underground power cable insulation under combined thermal and electrical stresses. IEEE Electr. Insul. Mag. 2007, 23, 25–33. [Google Scholar] [CrossRef]
- Yang, X.; Choi, M.S.; Lee, S.J.; Ten, C.W.; Lim, S.I. Fault location for underground power cable using distributed parameter approach. IEEE Trans. Power Syst. 2008, 23, 1809–1816. [Google Scholar] [CrossRef]
- Bicen, Y. Trend adjusted lifetime monitoring of underground power cable. Electr. Power Syst. Res. 2017, 143, 189–196. [Google Scholar] [CrossRef]
- Bascom, E.C.R.; Antonello, V.D. Underground power cable consideration: Alternatives to overhead. In Proceedings of the Conference Minnesota Power Systems, Brooklyn Center, MN, USA, 1–3 November 2011. [Google Scholar]
- Shafiq, M.; Kiitam, I.; Taklaja, P.; Kutt, L.; Kauhaniemi, K.; Palu, I. Identification and location of PD defects in medium voltage underground power cables using high frequency current transformer. IEEE Access 2019, 7, 103608–103618. [Google Scholar] [CrossRef]
- Densley, J. Ageing mechanisms and diagnostics for power cables—An overview. IEEE Electr. Insul. Mag. 2001, 17, 14–22. [Google Scholar] [CrossRef]
- Kaminaga, K.; Ichihara, M.; Jinno, M.; Fujii, O.; Fukunaga, S.; Kobayashi, M. Development of 500-kV XLPE cables and accessories for long-distance underground transmission line V. Long-term performance for 5000-kV XLPE cables and joints. IEEE Trans. Power Deliv. 1996, 11, 1185–1194. [Google Scholar] [CrossRef]
- Peter, C.J.M.; der Wielen, V.; Steennis, E.F. On-line PD monitoring system for MV cable connections with weak spot location. In Proceedings of the 2008 IEEE Power and Energy Society General Meeting—Conversion and Delivery of Electrical Energy in the 21st Century, Pittsburgh, PA, USA, 20–24 July 2008. [Google Scholar] [CrossRef]
- Sun, X.; Lee, W.K.; Hou, Y.; Pong, P.W.T. Underground power cable detection and inspection technology based on magnetic field sensing at ground surface level. IEEE Trans. Magn. 2014, 50, 6200605. [Google Scholar] [CrossRef]
- Kulkarni, S.; Santoso, S.; Thomas, A. Incipient fault location algorithm for underground cables. IEEE Trans. Smart Grid 2014, 5, 1165–1174. [Google Scholar] [CrossRef]
- Sidhu, T.S.; Xu, Z. Detection of incipient faults in distribution underground cables. IEEE Trans. Power Deliv. 2010, 25, 1363–1371. [Google Scholar] [CrossRef]
- Boggs, S.A. Partial Discharge: Overview and signal generation. IEEE Electr. Insul. Mag. 1990, 6, 33–39. [Google Scholar] [CrossRef]
- Satish, L.; Nazneen, B. Wavelet-based denoising of partial discharge signals buried in excessive noise and interference. IEEE Trans. Dielectr. Electr. Insul. 2003, 10, 354–367. [Google Scholar] [CrossRef]
- Wu, R.N.; Chang, C.K. The use of partial discharge as an online monitoring system for underground cable joints. IEEE Trans. Power Deliv. 2011, 26, 1585–1591. [Google Scholar] [CrossRef]
- Kirsten, V.O.A.; Aghaej, M.; Rüther, R. Aerial infrared thermography for low-cost and fast fault detection in utility-scale PV power plants. Sol. Energy 2020, 211, 721–724. [Google Scholar] [CrossRef]
- Alsafasfeh, M.; Abdel-Qader, I.; Bazuin, B.; Alsafasfeh, Q.; Su, W. Unsupervised fault detection and analysis for large photovoltaic systems using drones and machine vision. Energies 2018, 11, 2252. [Google Scholar] [CrossRef]
- Jalil, B.; Leone, G.R.; Martinelli, M.; Moroni, D.; Pascali, M.A.; Merton, A. Fault detection in power equipment via an unmanned aerial system using multi modal data. Sensors 2019, 19, 3014. [Google Scholar] [CrossRef] [PubMed]
- Jia, Z.; Liu, H.; Zheng, H.; Fan, S.; Liu, Z. An intelligent inspection robot for underground cable trenches based on adaptive 2d-slam. Machines 2022, 10, 1011. [Google Scholar] [CrossRef]
- Kim, J.S.; Choi, K.N.; Kang, S.W. Infrared thermal image-based sustainable fault detection for electrical facilities. Sustainability 2020, 13, 557. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the 2015 IEEE Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, Q.; Wang, Y. Road extraction by deep residual u-net. IEEE Geosci. Remote Sens. Lett. 2018, 15, 2961–2969. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017. [Google Scholar] [CrossRef]
- KEPCO. Underground Transmission Operation Standards; KEPCO: Naju-si, Republic of Korea, 2016. [Google Scholar]
- Ooi, C.H.; Kong, N.S.P.; Ibrahim, H. Bi-histogram equalization with a plateau limit for digital image enhancement. IEEE Trans. Consum. Electron. 2009, 55, 2072–2080. [Google Scholar] [CrossRef]
- Zou, Q.; Zhang, Z.; Li, Q.; Qi, X.; Wang, Q.; Wang, S. DeepCrack: Learning hierarchical convolutional features for crack detection. IEEE Trans. Image Process. 2018, 28, 1498–1512. [Google Scholar] [CrossRef]
- Nair, V.; Hinton, G.E. Rectified linear units improve restricted Boltzmann machines. In Proceedings of the 27th International Conference on International Conference on Machine Learning, Haifa, Israel, 21–24 June 2010. [Google Scholar]
- Noh, H.; Hong, S.H.; Han, B.Y. Learning deconvolution network for semantic segmentation. In Proceedings of the 2015 IEEE International Conference Computer Vision (ICCV), Santiago, Chile, 17 May 2015. [Google Scholar] [CrossRef]
- Henke, S.; Karstadt, D.; Mollmann, K.P.; Pinno, F.; Volmmer, M. Identification and suppression of thermal reflection in infrared thermal imaging. InfraMation 2004, 5, 287–298. [Google Scholar]
- Suuzuki, S.; Be, K. Topological structural analysis of digitized binary images by border following. Comput. Vis. Graph. Image Process. 1985, 30, 32–46. [Google Scholar] [CrossRef]
- Ester, M.; Kriegel, H.P.; Sander, J.; Xu, X. A density-based algorithm for discovering clusters in large spatial databases with noise. In Proceedings of the Second International Conference on Knowledge Discovery and Data Mining, Portland, OR, USA, 2–4 August 1996; pp. 226–231. [Google Scholar]
- Bernard, V.; Staffa, E.; Mornstein, V.; Bourek, A. Infrared camera assessment of skin surface temperature-effect of emissivity. Phys. Medica 2013, 29, 583–591. [Google Scholar] [CrossRef] [PubMed]
- Barreira, E.; Almeida, R.M.S.F.; Simões, M.L. Emissivity of building materials for infrared measurements. Sensors 2021, 21, 1961. [Google Scholar] [CrossRef] [PubMed]
- Russell, B.C.; Torralba, A.; Murphy, K.P.; Freeman, W.T. LabelMe: A Database and web-based tool for image annotation. Int. J. Comput. Vis. 2008, 77, 157–173. [Google Scholar] [CrossRef]
- Jardon, S. A survey of loss functions for semantic segmentation. In Proceedings of the 2020 IEEE Conference on Computational Intelligence in Bioinformatics and Computational Biology (CIBCB), Via del Mar, Chile, 27–29 October 2020. [Google Scholar] [CrossRef]
- Frazier, P.I. A tutorial on Bayesian optimization. arXiv 2018, arXiv:1807.02811. [Google Scholar] [CrossRef]
- Micikevicius, P.; Narang, S.; Alben, J.; Diamos, G.; Elsen, E.; Garcia, D.; Ginsburg, B.; Houston, M.; Kuchaiev, O.; Venkatesh, G.; et al. Mixed precision training. arXiv 2018, arXiv:1710.03740. [Google Scholar] [CrossRef]
- Kim, Y.T. Contrast enhancement using brightness preserving bi—Histogram equalization. IEEE Trans Consum. Electron. 1997, 43, 1–8. [Google Scholar] [CrossRef]
- Chen, S.D.; Ramli, A.R. Contrast enhancement using recursive mean-sperate histogram equalization for scalable brightness preservation. IEEE Trans Consum. Electron. 2003, 49, 1301–1309. [Google Scholar] [CrossRef]
- Chen, S.D.; Ramli, A.R. Minimum mean brightness error bi-histogram equalization in contrast enhancement. IEEE Trans Consum. Electron. 2003, 49, 1310–1319. [Google Scholar] [CrossRef]
- Fei, N.; Gao, Y.; Lu, Z.; Xiang, T. Z-score normalization, hubness, and few-shot learning. In Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision (ICCV), Montreal, QC, Canada, 10–17 October 2021. [Google Scholar] [CrossRef]
- Singh, D.; Singh, B. Feature wise normalization: An effective way of normalizing data. Pattern Recognit. 2022, 122, 108307. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset # | UTLC # | JB # | Images-Sets | |
|---|---|---|---|---|
| Normal | Abnormal | |||
| DS #1 | SY #1 | 1–2 | 515 | - |
| DS #1 | SY #2 | 1–2 | 97 | 32 |
| DS #2 | SY #1 | 3–5 | 2500 | 625 |
| DS #2 | SY #2 | 3–5 | 2500 | 625 |
| Initial Ranges of the Hyperparameters | ||||||
|---|---|---|---|---|---|---|
| Networks | Hyperparameters | |||||
| Batch Size | Learning Rate | First Momentum | Second Momentum | Weight Decay | Epsilon | |
| All | 4–20 w/2 interval | 1 × 10−6 −1 × 10−4 | 0.9–0.999 | 0.9–0.999 | 0.01 –0.3 | 1 × 10−8 −1 × 10−6 |
| Optimized Hyperparameters | ||||||
| Networks | Hyperparameters | |||||
| Batch Size | Learning Rate | First Momentum | Second Momentum | Weight Decay | Epsilon | |
| Mask R-CNN | 12 | 0.929 | 0.958 | 0.129 | ||
| ResUNet | 20 | 0.955 | 0.985 | 0.143 | ||
| MS mask DCNN (s4) | 18 | 0.923 | 0.951 | 0.113 | ||
| MS mask DCNN (s5) | 20 | 0.944 | 0.983 | 0.017 | ||
| MS mask DCNN (s6) | 4 | 0.959 | 0.961 | 0.269 | ||
| MIoU (%) @ Normal Data | ||||||||
|---|---|---|---|---|---|---|---|---|
| Mask-Based CNNs | Normalization | Histogram-Based Image Strengthening | FPS | |||||
| None | HE | BBHE | RMSHE | MMBEBHE | BHEPL (Proposed) | |||
| Mask R-CNN | Min-Max | 68.45 | 74.80 | 77.66 | 76.70 | 78.04 | 81.92 | 16.4 |
| Z-score | 82.69 | 77.82 | 79.15 | 79.94 | 78.42 | 84.42 | ||
| ResUNet | Min-Max | 79.37 | 77.90 | 82.40 | 82.15 | 81.40 | 86.34 | 44.2 |
| Z-score | 82.18 | 82.89 | 84.14 | 85.86 | 86.81 | 87.43 | ||
| MS mask DCNN (s4) | Min-Max | 70.86 | 85.53 | 85.63 | 78.46 | 76.50 | 70.85 | 63.1 |
| Z-score | 63.45 | 85.77 | 89.11 | 87.96 | 84.34 | 89.57 | ||
| MS mask DCNN (s5) | Min-Max | 87.16 | 80.64 | 81.65 | 85.26 | 82.88 | 88.65 | 46.7 |
| Z-score | 90.48 | 86.02 | 84.67 | 88.00 | 83.19 | 90.59 | ||
| MS mask DCNN (s6) | Min-Max | 88.18 | 87.08 | 87.59 | 83.08 | 83.02 | 90.78 | 30.0 |
| Z-score | 89.27 | 89.25 | 89.41 | 87.19 | 89.66 | 90.95 | ||
| MIoU (%) @ Anomaly Data | ||||||||
| Mask R-CNN | Min-Max | 27.13 | 74.93 | 64.56 | 18.79 | 49.00 | 24.62 | 16.4 |
| Z-score | 73.46 | 77.22 | 77.19 | 79.43 | 78.74 | 80.38 | ||
| ResUNet | Min-Max | 25.98 | 77.90 | 40.04 | 17.22 | 48.72 | 45.93 | 44.2 |
| Z-score | 77.50 | 84.06 | 83.72 | 80.86 | 85.24 | 86.95 | ||
| MS mask DCNN (s4) | Min-Max | 32.97 | 75.97 | 64.52 | 30.38 | 60.87 | 43.35 | 63.1 |
| Z-score | 62.14 | 87.52 | 82.00 | 83.81 | 86.43 | 91.57 | ||
| MS mask DCNN (s5) | Min-Max | 68.93 | 80.12 | 79.02 | 71.62 | 70.16 | 60.62 | 46.7 |
| Z-score | 70.71 | 88.71 | 87.02 | 80.71 | 82.58 | 92.92 | ||
| MS mask DCNN (s6) | Min-Max | 76.81 | 87.44 | 75.03 | 58.80 | 71.94 | 74.49 | 30.0 |
| Z-score | 82.68 | 91.40 | 85.03 | 71.78 | 90.33 | 91.86 | ||
| Dataset | Data Type | w/o the Contour Method | w/the Contour Method | ||
|---|---|---|---|---|---|
| MIoU (%) | FPS | MIoU (%) | FPS | ||
| Normal | Single tensor | 90.59 | 42.0 | 92.49 | 41.6 |
| Normal | Half tensor | 90.60 | 64.4 | 92.49 | 62.7 |
| Abnormal | Single tensor | 92.92 | 34.6 | 92.92 | 34.0 |
| Abnormal | Half tensor | 92.92 | 48.2 | 92.92 | 47.5 |
| UTLC # | JB # | (°C) * | (°C) ** | (°C) ** | (°C) ** | (°C) *** | Anomaly Phase # |
|---|---|---|---|---|---|---|---|
| SY #1 | # 3 | 32.6 | 32.6 | 41.3 | 32.7 | 8.7 | B |
| # 4 | 32.7 | 43.3 | 32.9 | 32.6 | 10.6 | A | |
| # 5 | 31.7 | 31.9 | 31.9 | 43.1 | 11.5 | C | |
| SY #2 | # 3 | 31.6 | 31.6 | 41.1 | 31.4 | 9.5 | B |
| # 4 | 32.5 | 45.0 | 32.5 | 31.9 | 12.6 | A | |
| # 5 | 32.7 | 32.6 | 41.9 | 32.7 | 9.2 | B |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, M.-G.; Jeong, S.; Kim, S.-T.; Oh, K.-Y. Anomaly Detection of Underground Transmission-Line through Multiscale Mask DCNN and Image Strengthening. Mathematics 2023, 11, 3143. https://doi.org/10.3390/math11143143
Kim M-G, Jeong S, Kim S-T, Oh K-Y. Anomaly Detection of Underground Transmission-Line through Multiscale Mask DCNN and Image Strengthening. Mathematics. 2023; 11(14):3143. https://doi.org/10.3390/math11143143
Chicago/Turabian StyleKim, Min-Gwan, Siheon Jeong, Seok-Tae Kim, and Ki-Yong Oh. 2023. "Anomaly Detection of Underground Transmission-Line through Multiscale Mask DCNN and Image Strengthening" Mathematics 11, no. 14: 3143. https://doi.org/10.3390/math11143143
APA StyleKim, M.-G., Jeong, S., Kim, S.-T., & Oh, K.-Y. (2023). Anomaly Detection of Underground Transmission-Line through Multiscale Mask DCNN and Image Strengthening. Mathematics, 11(14), 3143. https://doi.org/10.3390/math11143143