
Andness Directedness for t-Norms and t-Conorms


Abstract
:1. Introduction
2. Preliminaries
2.1. Fuzzy Operators: t-Norms and t-Conorms
- (commutativity)
- when and (monotonicity)
- (associativity)
- (identity)
- (commutativity);
- when and (monotonicity);
- (associativity);
- (identity).
2.2. Andness and Orness
3. Andness Directedness for t-Norms
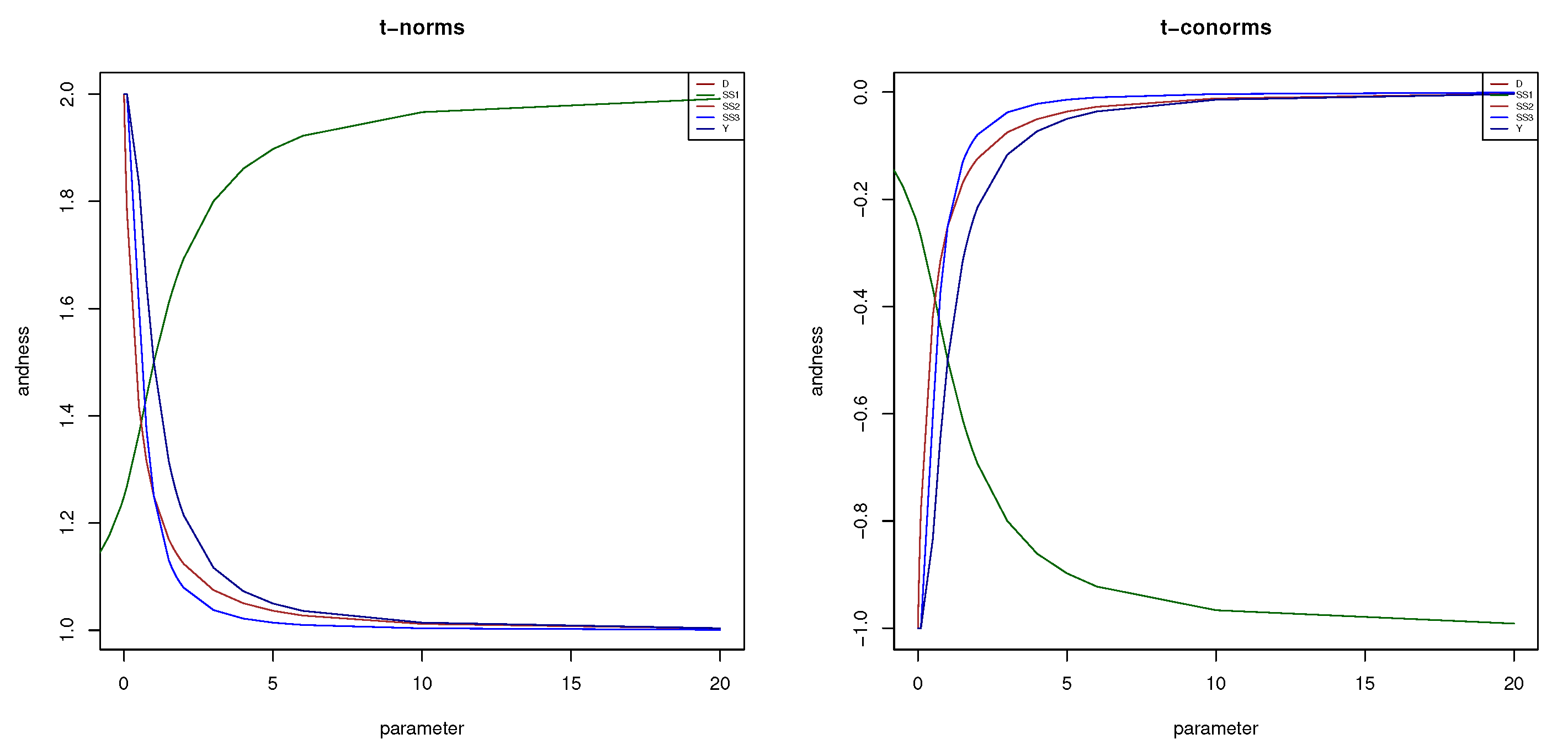
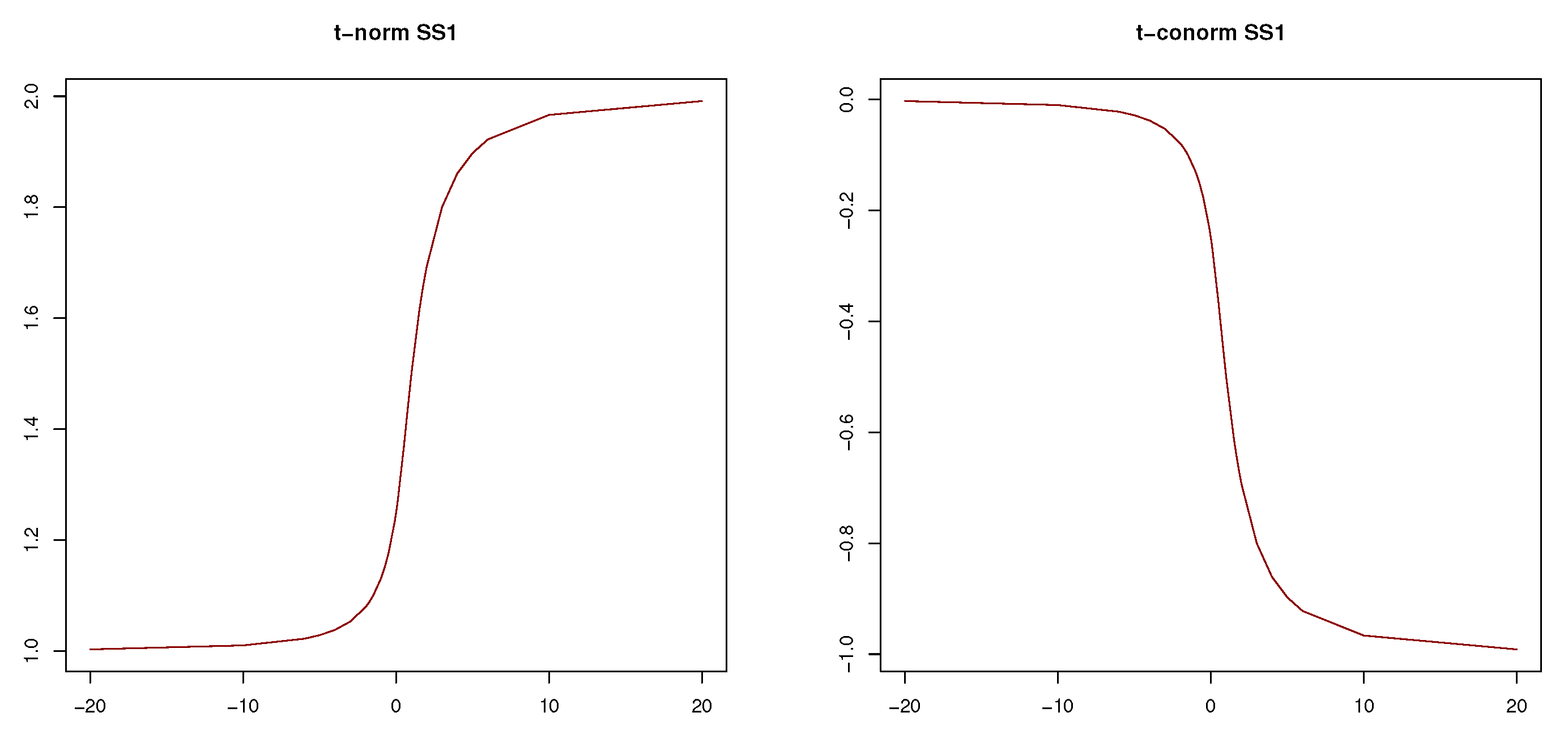
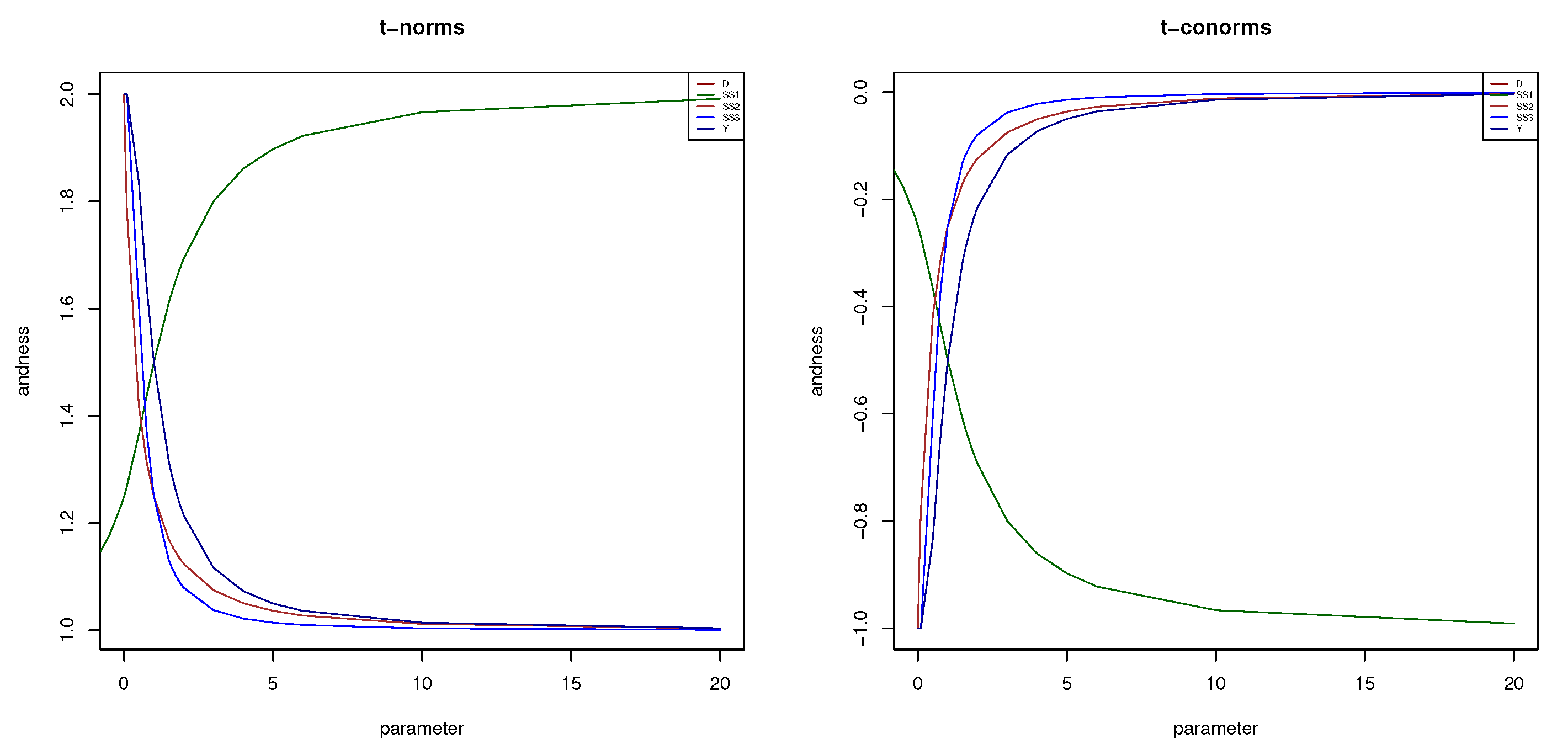
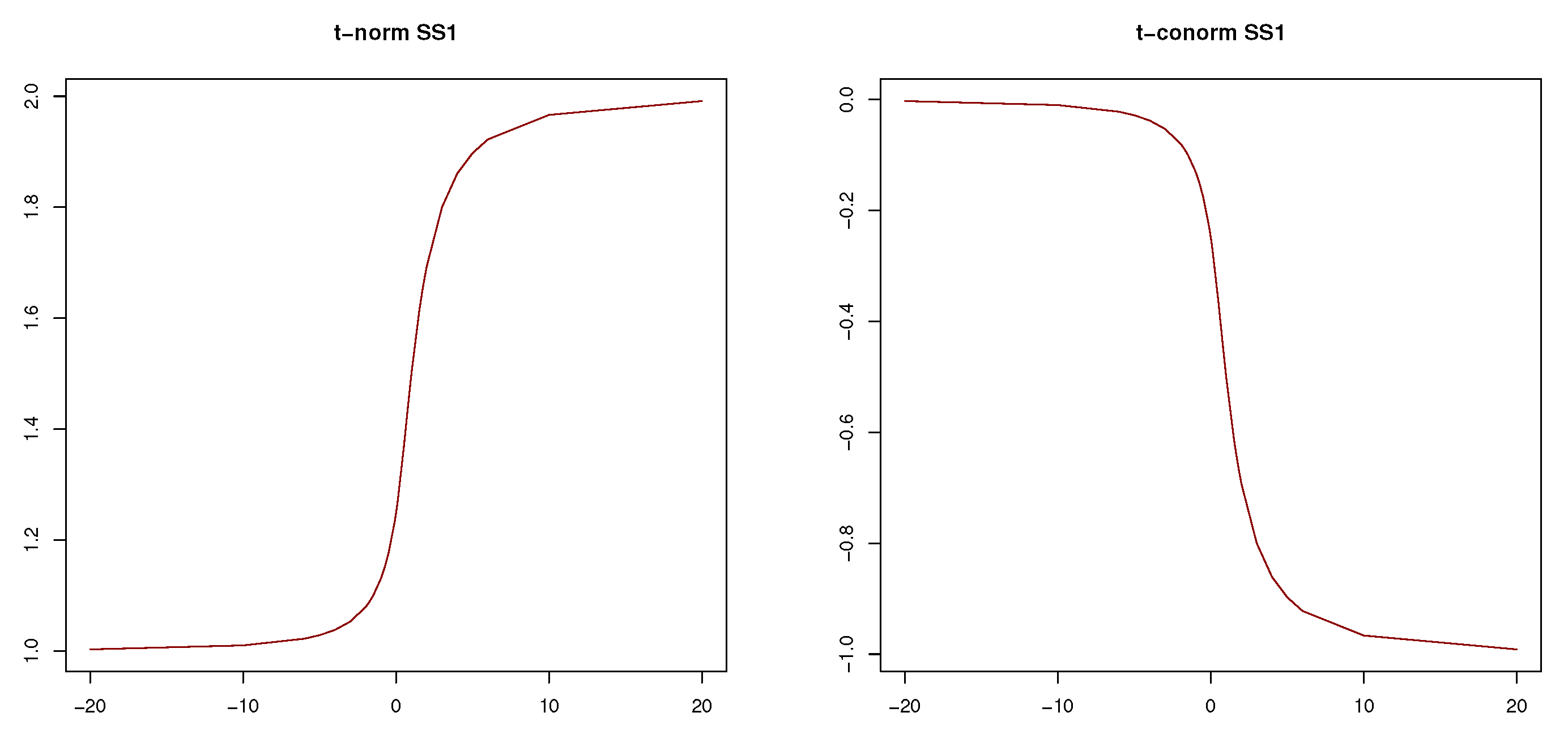
- Establish the relationship between the parameter and andness. Compute the andness of for p in . As we cannot consider the full range of p, we will select a finite subset of this range large enough to have a good approximation. We denote this finite subset of the range by . This process results in pairs . As andness is monotonic with respect to p, we can interpolate (e.g., linearly) the relationship between p and the andness easily.Figure 1 displays the andness for the t-norms (left) and t-conorms (right) discussed in Section 2. Therefore, we include , , , , and as t-norms, and , , , , as t-conorms. It is worth noting that in the figure only four lines are visible because the lines for (Dombi’s t-norm) and are indistinguishable. In Figure 1, we consider positive parameters , p, and w for all t-norms and t-conorms. We have discussed before that the parameter for both t-norm and t-conorm and can take any value except zero. For this reason, we represent the andness of these function independently in Figure 2.
- Establish the parameter given the andness. Given the andness level and the pairs check if there is a value . If this is the case, select . Otherwise, find a pair of values and that satisfy . Then, first, compute and, second, compute . For example, given for a given t-norm ⊤, we compute , or, in other words, we approximate the parameter p as the inverse of the andness for the given andness .We will use , , and to denote this process. For example, for , we obtain the following 5 parameters. For , ; for , ; , ; and for , .
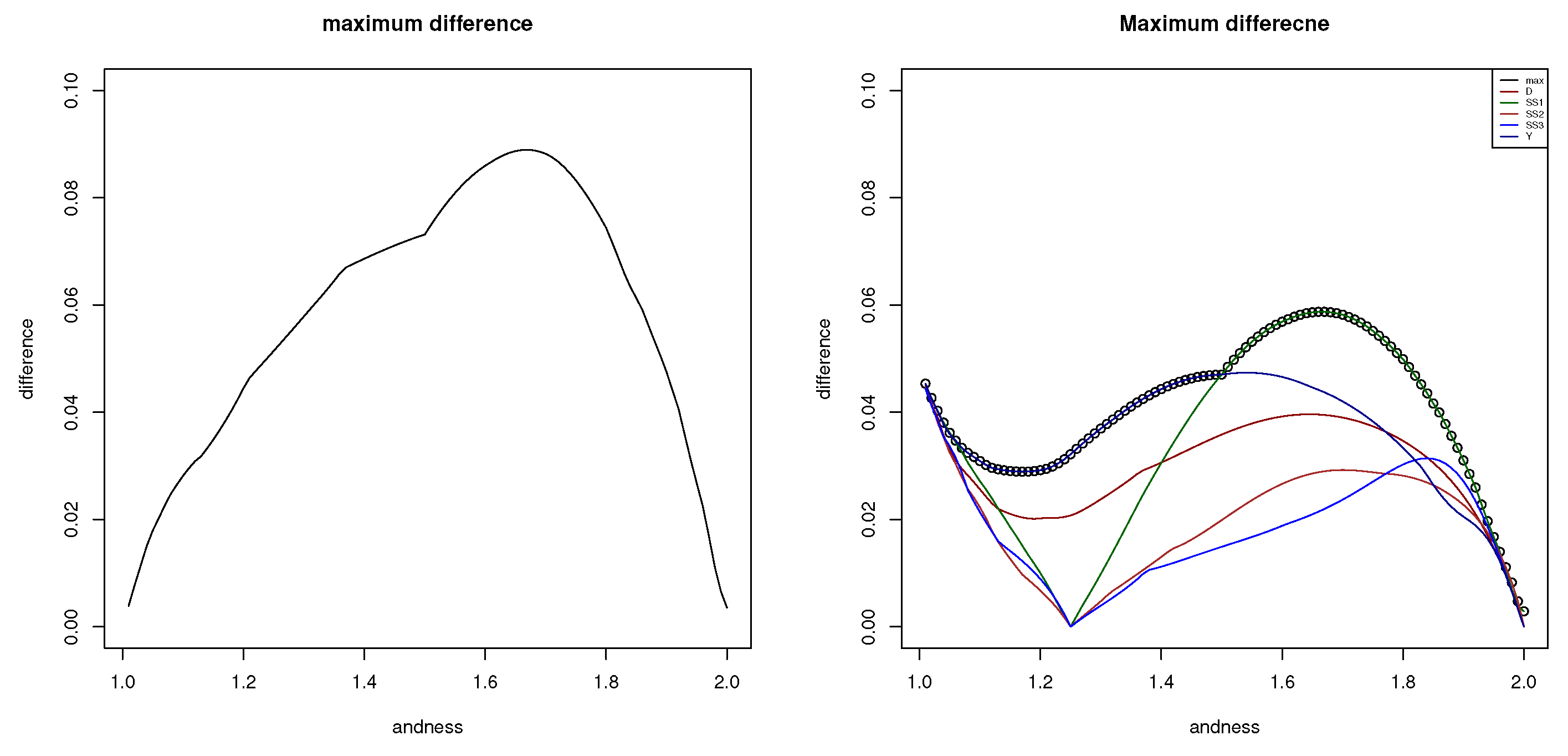
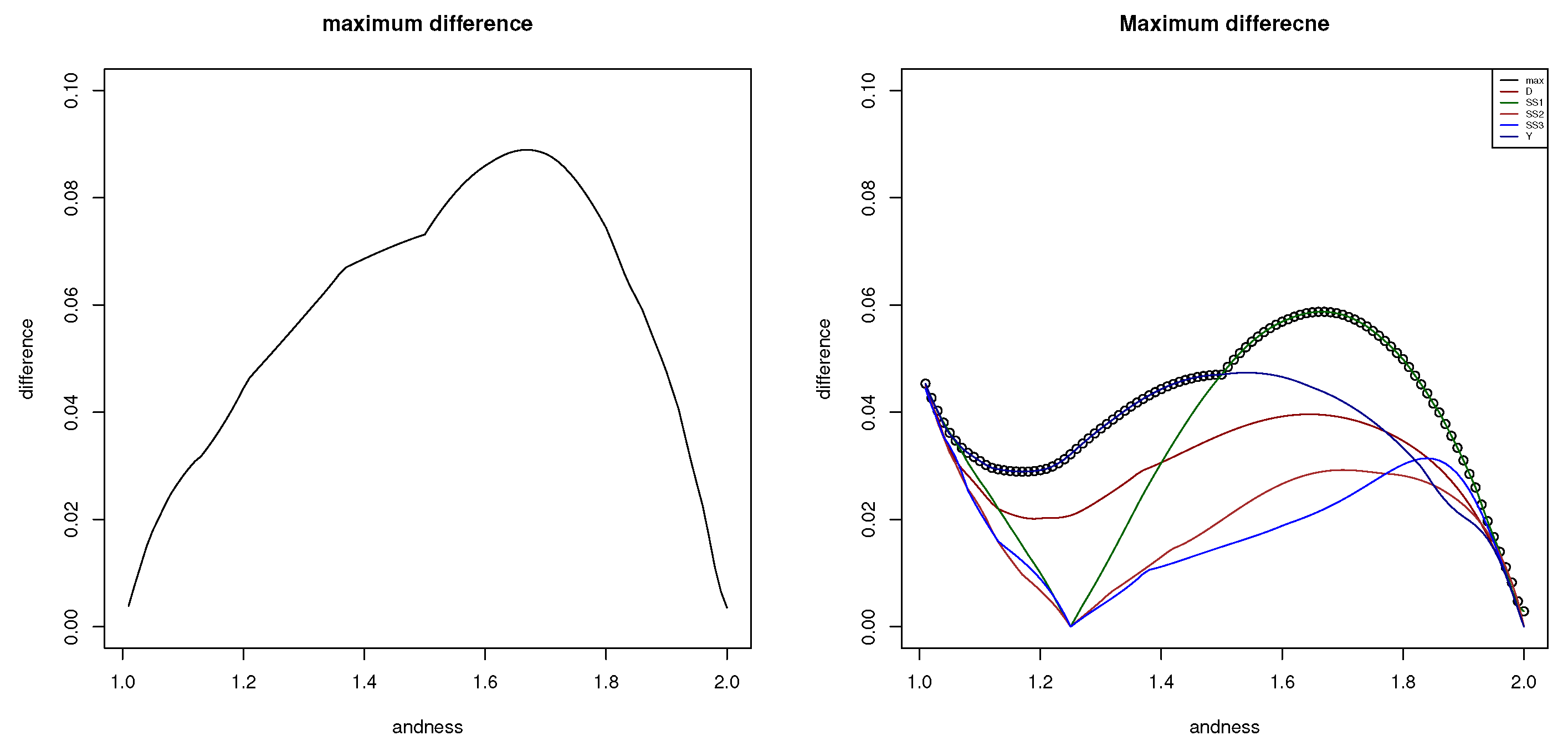
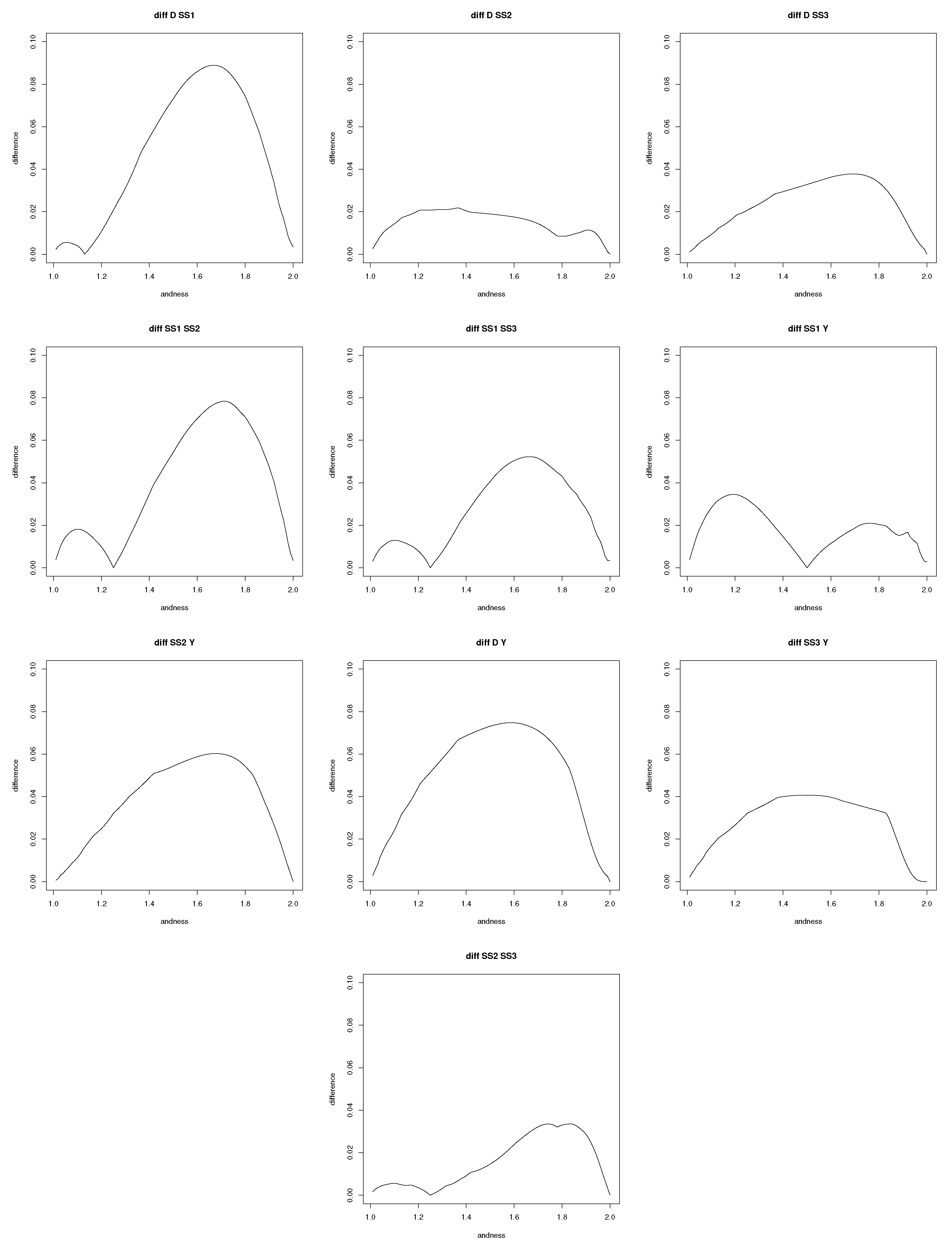
3.1. Differences between t-Norms for a Given Andness
3.2. Differences between t-Norms and High Hyperconjunction for a Given Andness
3.3. Analysis
4. Conclusions and Future Directions
Funding
Data Availability Statement
Conflicts of Interest
References
- Torra, V.; Narukawa, Y. Modeling Decisions: Information Fusion and Aggregation Operators; Springer: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Dujmović, J.J. Soft Computing Evaluation Logic; J. Wiley and IEEE Press: Hoboken, NJ, USA, 2018. [Google Scholar]
- Beliakov, G.; Pradera, A.; Calvo, T. Aggregation Functions: A Guide for Practitioners; Springer: Berlin/Heidelberg, Germany, 2008. [Google Scholar]
- Beliakov, G.; Bustince, H.; Calvo, T. A Practical Guide to Averaging Functions; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Grabisch, M.; Marichal, J.-L.; Mesiar, R.; Pap, E. Aggregation Functions; Cambridge University Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Dujmović, J.J.; Torra, V. Properties and comparison of andness-characterized aggregators. Int. J. Intel. Syst. 2021, 36, 1366–1385. [Google Scholar] [CrossRef]
- Dujmović, J.J.; Torra, V. Aggregation functions in decision engineering: Ten necessary properties and parameter-directedness. In Proceedings of the International Conference on Intelligent and Fuzzy Systems, Istanbul, Turkey, 24–26 August 2021; pp. 173–181. [Google Scholar]
- Dujmović, J.J. A generalization of some functions in continous mathematical logic–evaluation function and its applications. In Proceedings of the Informatica Conference, Bled, Yugoslavia; 1973. Paper d27 (In Serbo-Croatian). [Google Scholar]
- Dujmović, J.J. Two integrals related to means. J. Univ. Belgrade Dept. Ser. Math. Phys. 1973, 412–460, 231–232. [Google Scholar]
- Dujmović, J.J. Extended continuous logic and the theory of complex criteria. J. Univ. Belgrade EE Dept. Ser. Math. Phys. 1975, 498, 197–216. [Google Scholar]
- Dujmović, J.J. Weighted conjunctive and disjunctive means and their application in system evaluation. J. Univ. Belgrade EE Dept. Ser. Math. Phys. 1974, 483, 147–158. [Google Scholar]
- Yager, R.R. Families of OWA operators. Fuzzy Sets Syst. 1993, 59, 125–148. [Google Scholar] [CrossRef]
- Torra, V. Empirical analysis to determine Weighted OWA orness. In Proceedings of the 5th International Conference on Information Fusion (Fusion 2001), Montréal, QC, Canada, 26–29 March 2001. [Google Scholar]
- Torra, V. Effects of orness and dispersion on WOWA sensitivity. In Artificial Intelligence Research and Development; Alsinet, T., Puyol-Gruart, J., Torras, C., Eds.; IOS Press: Amsterdam, The Netherlands, 2008; pp. 430–437. ISBN 978-1-58603-925-7. [Google Scholar]
- Torra, V. The weighted OWA operator. Int. J. Intel. Syst. 1997, 12, 153–166. [Google Scholar] [CrossRef]
- O’Hagan, M. Fuzzy decision aids. In Proceedings of the 21st Annual Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 2–4 November 1987; IEEE and Maple Press: Piscataway, NJ, USA, 1988; Volume 2, pp. 624–628. [Google Scholar]
- O’Hagan, M. Aggregating template or rule antecedents in real-time expert systems with fuzzy set logic. In Proceedings of the 22nd Annual IEEE Asilomar Conference Signals, Systems, Computers, Pacific Grove, CA, USA, 31 October–2 November 1988; pp. 681–689. [Google Scholar]
- Carbonell, M.; Mas, M.; Mayor, G. On a class of monotonic extended OWA operators. In Proceedings of the 6th IEEE International Conference on Fuzzy Systems, Barcelona, Spain, 1–5 July 1997; pp. 1695–1699. [Google Scholar]
- Fullér, R.; Majlender, P. An analytic approach for obtaining maximal entropy OWA operator weights. Fuzzy Sets Syst. 2001, 124, 53–57. [Google Scholar] [CrossRef]
- Fullér, R.; Majlender, P. On obtaining minimal variability OWA operator weights. Fuzzy Sets Syst. 2003, 136, 203–215. [Google Scholar] [CrossRef]
- Torra, V. Andness directedness for operators of the OWA and WOWA families. Fuzzy Sets Syst. 2021, 414, 28–37. [Google Scholar] [CrossRef]
- Kolesárová, A.; Mesiar, R. Parametric characterization of aggregation functions. Fuzzy Sets Syst. 2009, 160, 816–831. [Google Scholar] [CrossRef]
- Jin, L.; Mesiar, R.; Yager, R.R. Families of value-dependent preference aggregation operators with their structures and properties. Int. J. Uncertain. Fuzziness-Knowl.-Based Syst. 2022, in press. [Google Scholar]
- Alsina, C.; Frank, M.J.; Schweizer, B. Associative Functions: Triangular Norms and Copulas; World Scientific: Singapore, 2006. [Google Scholar]
- Klement, E.P.; Mesiar, R.; Pap, E. Triangular Norms; Kluwer Academic Publisher: Philip Drive Norwell, MA, USA, 2000. [Google Scholar]
- Driankov, D.; Hellendoorn, H.; Reinfrank, M. An Introduction to Fuzzy Control; Springer: New York, NY, USA, 1993. [Google Scholar]
- Klir, G.J.; Yuan, B. Fuzzy Sets and Fuzzy Logic: Theory and Applications; Prentice Hall: London, UK, 1995. [Google Scholar]
- Dombi, J. A general class of fuzzy operators, the DeMorgan class of fuzzy operators and fuzziness measures induced by fuzzy operators. Fuzzy Sets Syst. 1982, 8, 149–163. [Google Scholar] [CrossRef]
- Schweizer, B.; Sklar, A. Associative functions and abstract semigroups. Publ. Math. Debr. 1963, 10, 69–81. [Google Scholar]
- Yager, R.R. On a general class of fuzzy connectives. Fuzzy Sets Syst. 1980, 4, 235–242. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| t-norm | ||||
| andness | 1.000 | 1.250 | 1.500 | 2.000 |
| t-conorm | ||||
| andness | 0.000 | −0.250 | −0.500 | −1.000 |
| Case | |||||
|---|---|---|---|---|---|
| (0.8, 0.8) | 0.3566074 | 0.5738743 | 0.4089883 | 0.4146452 | 0.5387788 |
| (0.5, 0.5) | 0.1217016 | 0 | 0.1120718 | 0.06492248 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Torra, V. Andness Directedness for t-Norms and t-Conorms. Mathematics 2022, 10, 1598. https://doi.org/10.3390/math10091598
Torra V. Andness Directedness for t-Norms and t-Conorms. Mathematics. 2022; 10(9):1598. https://doi.org/10.3390/math10091598
Chicago/Turabian StyleTorra, Vicenç. 2022. "Andness Directedness for t-Norms and t-Conorms" Mathematics 10, no. 9: 1598. https://doi.org/10.3390/math10091598
APA StyleTorra, V. (2022). Andness Directedness for t-Norms and t-Conorms. Mathematics, 10(9), 1598. https://doi.org/10.3390/math10091598