
Robust Fuzzy Control for Uncertain Nonlinear Power Systems




Abstract
:1. Introduction
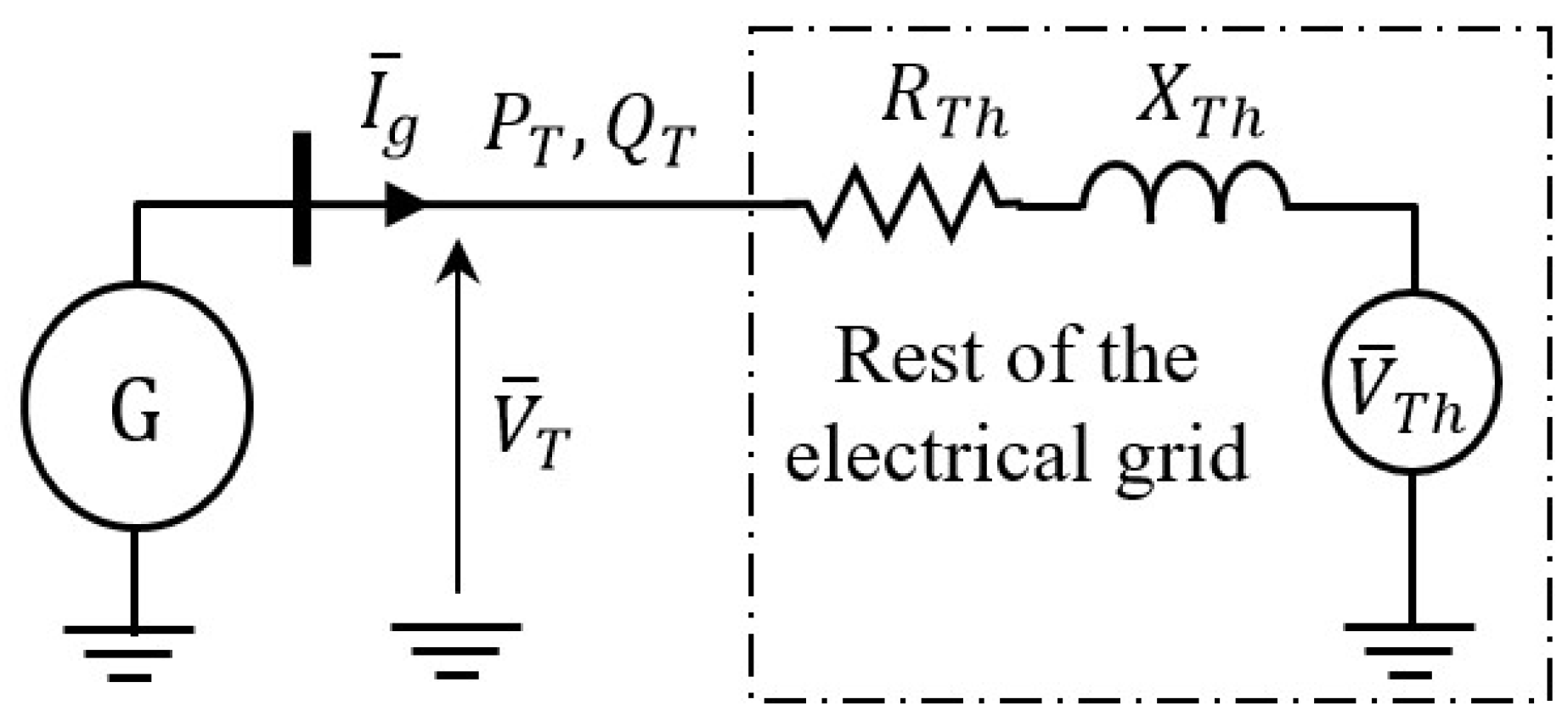
- In order to overcome the complexities of power grids, a novel strategy for modeling a multimachine power system by TSF is developed. In this strategy, a multimachine system is subdivided into sub-systems equivalent to single machine infinite bus (SMIB) systems. Each sub-system corresponds to a generating unit in series with the Thevenin equivalent seen from this unit. The rest of the multimachine network, as seen from each machine, is therefore considered as a Thevenin model composed of a voltage source Vth in series with resistance Rth and reactance Xth. The Thevenin equivalent parameters are calculated after solving the load flow problem under various operating conditions. As a result, no assumptions are made, which leads to accurate modeling of the studied system. It should be noted that the number of these sub-systems is equal to the number of system machines. The complete model of each SMIB system is determined based on Blondel’s diagram [23]. To the best of the authors’ knowledge, this strategy has not been applied in other published works.
- In order to represent SMIB systems using TSF models, each nonlinearity is described by two fuzzy rules. It is worth noting that each SMIB system model has four nonlinearities, which results in 16 fuzzy rules for each sub-system; therefore, the greater the number of generators, the greater the number of fuzzy rules. Thus, a new method for reducing the number of fuzzy rules is presented in this study. In this method, the significances of the nonlinearities of sub-systems are ranked based on their limits and variation range under various operating conditions. Then, nonlinearities with non-significant variations are assumed to be uncertainties. This might be useful in applying the proposed uncertain fuzzy controller (UFC) in a more efficient and effective way. In this study, the parameters of the UFC laws are tuned using the Lyapunov function method, where the stability conditions are solved using an LMI-based framework.
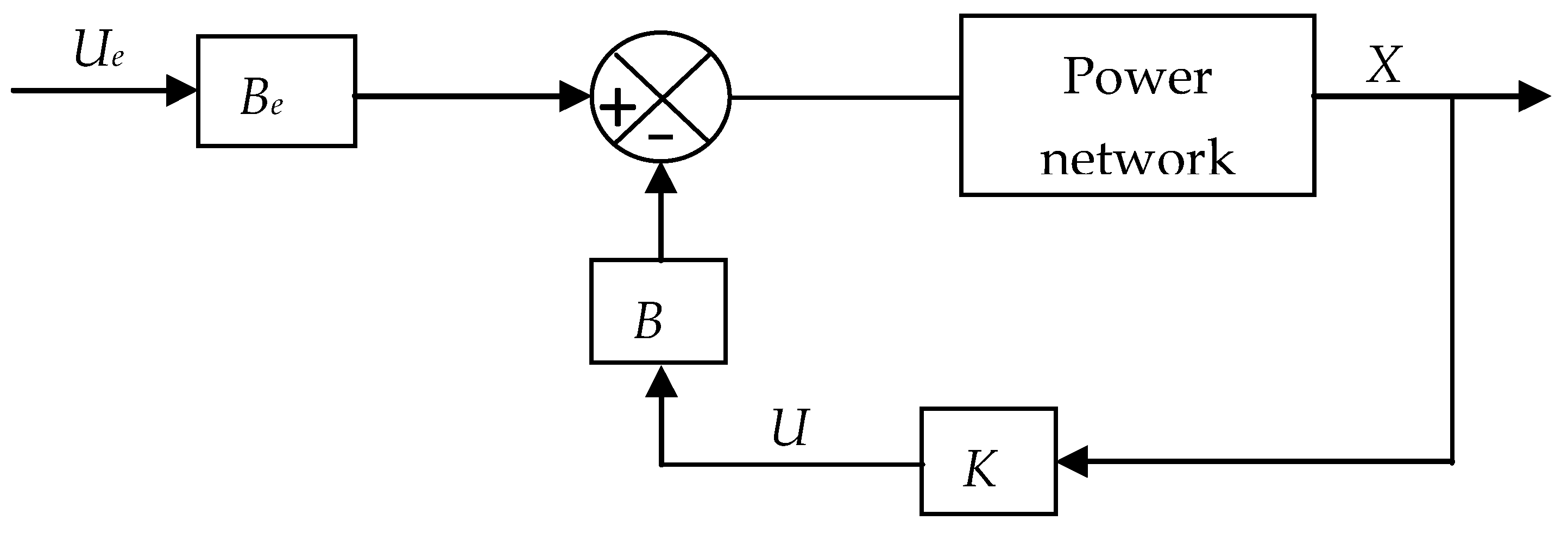
- The applicability and robustness of the proposed UFC are tested for the stabilization of a multimachine power system. The controller is applied directly to the PSS regulators, aiming to increase the damping of system oscillations after the occurrence of disturbances. To the best of our knowledge, this is the first attempt to apply the proposed UFC to the stabilization of a multimachine power system. According to our simulation results, the proposed controller achieved an accurate representation of the system and responded effectively to changes in the system operating conditions.
2. Proposed TSF Modeling Method for Nonlinear Systems
- if n is the number of nonlinearities, then the number of the local sub-systems is and the number of fuzzy rules is also ;
- if some nonlinearities are the same or proportional, then only one nonlinearity among them will be considered.
3. Stabilization of an Uncertain Fuzzy System
4. Stabilization of Uncertain Fuzzy System Based on Decay Rate
- Pr 1:
- Pr 2:such that
- Pr 1:
- Pr 2:such that:
5. Power System Modeling
5.1. Subdivision of a Power System into SMIB Sub-Systems
5.2. Calculation of the Parameters of the Thevenin Equivalent Circuit
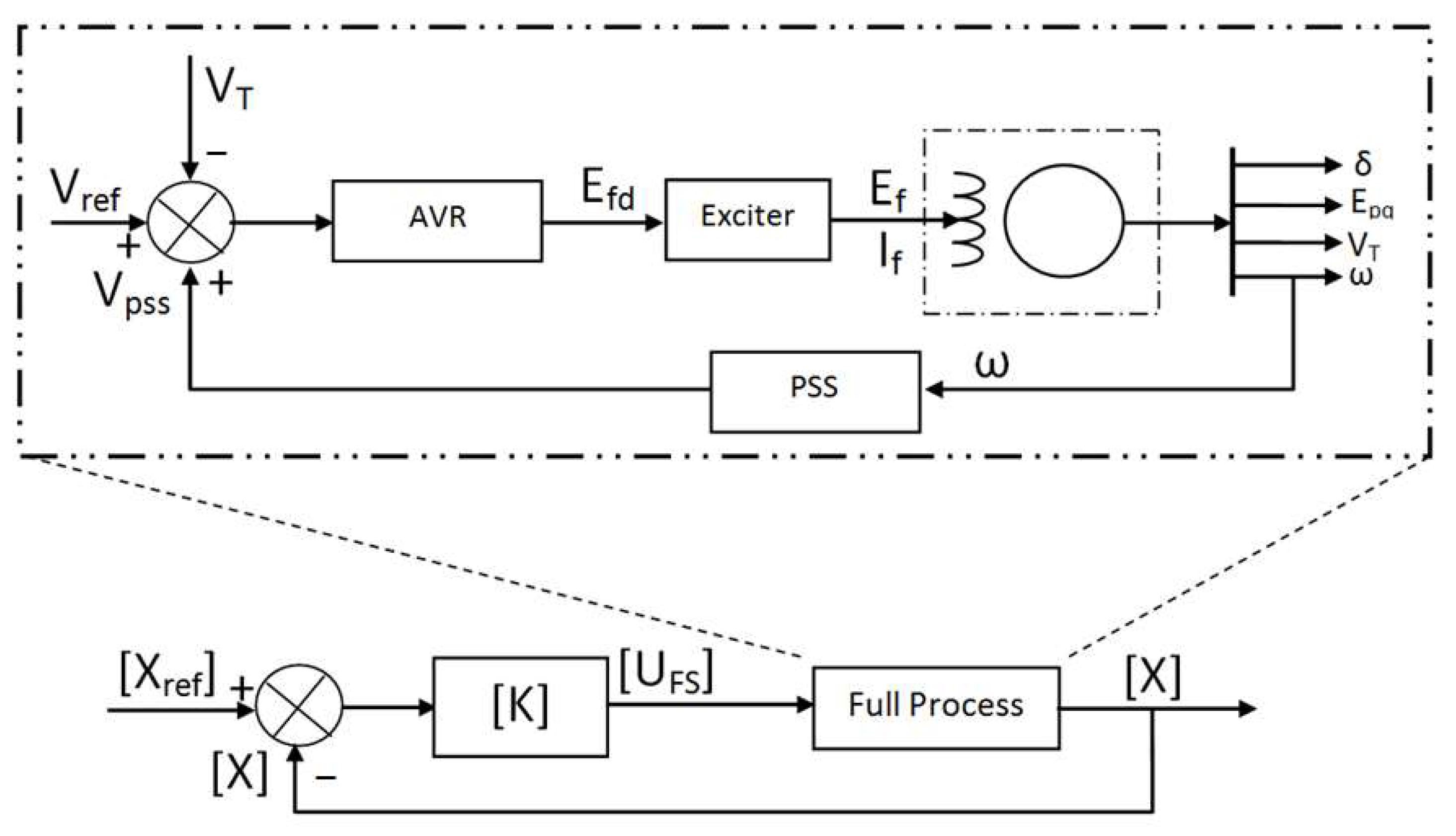
5.3. Dynamic Model of a Synchronous Machine
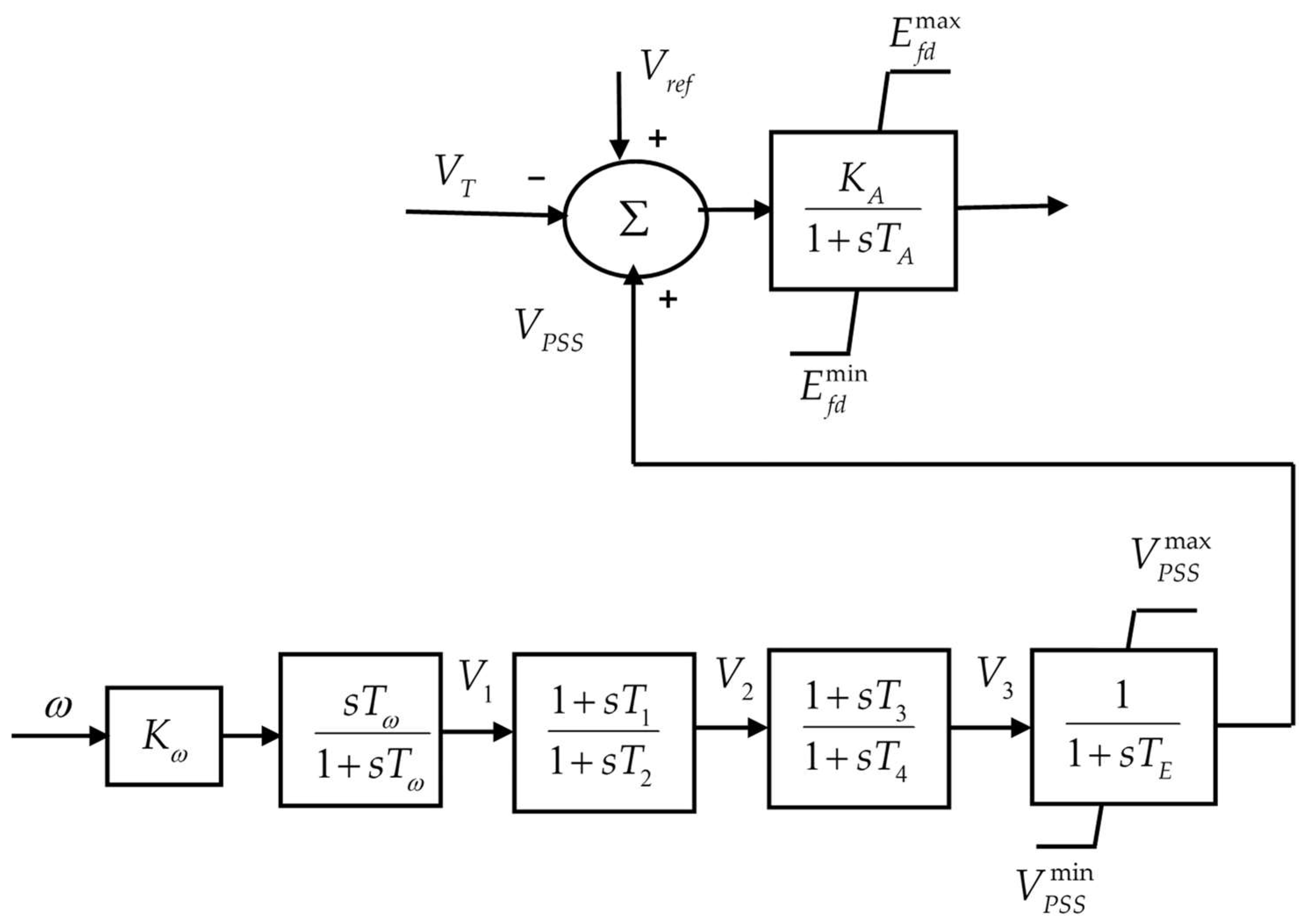
5.4. Modeling of the Excitation System with PSS and AVR
5.5. Load Modeling
5.6. State-Space Representation of the Power System
6. Numerical Simulations and Discussions
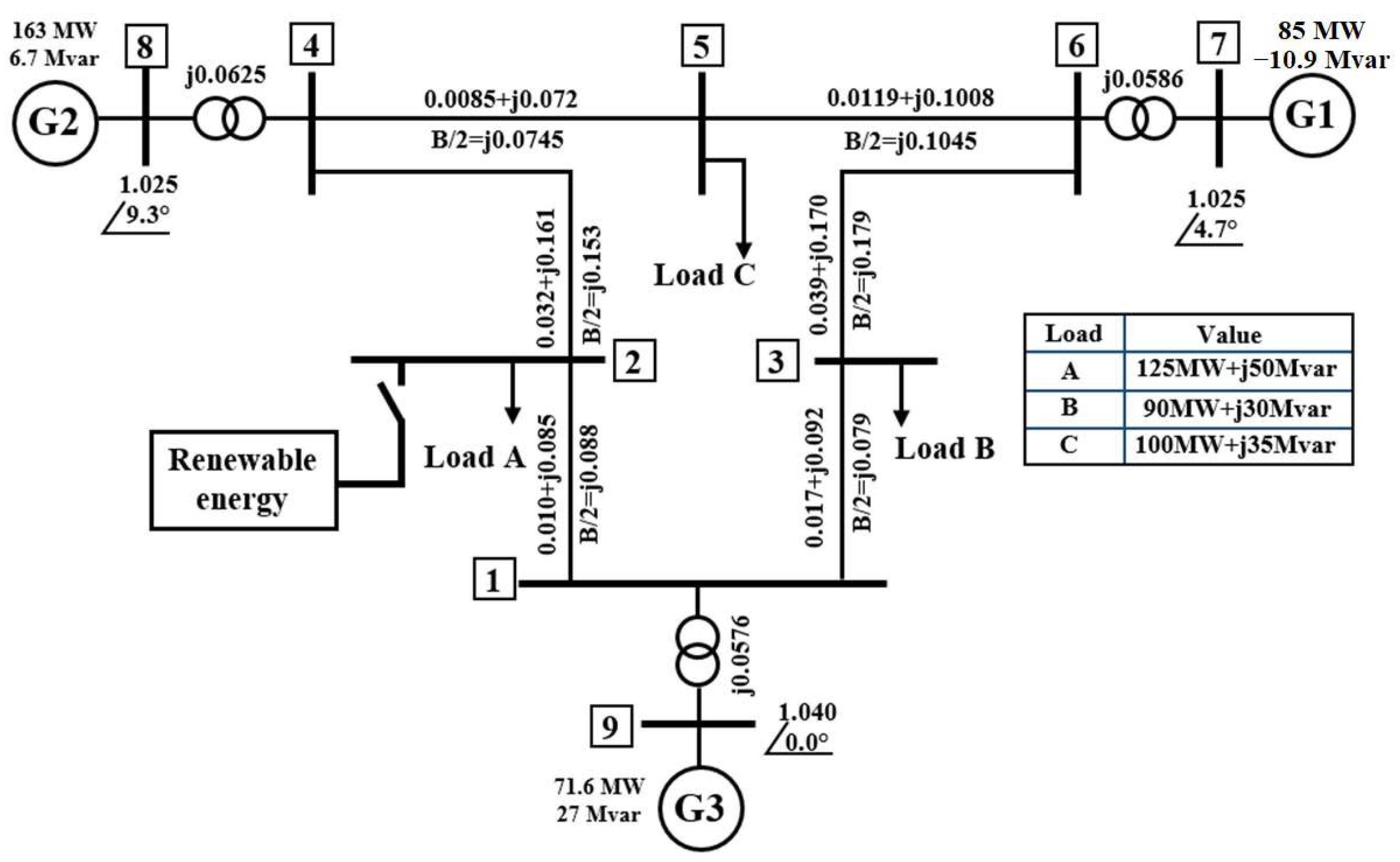
6.1. Description of the Studied System
6.2. Results for the Steady State Conditions
- Case 1: A WSCC system without renewable energy penetration (WREP).
- Case 2: A WSCC system with low renewable energy penetration (LREP), i.e., 0.1965 pu, which corresponds to 6.24% of the total load.
- Case 3: A WSCC system with high renewable energy penetration (HREP), i.e., 0.675 pu, which corresponds to 21.43% of the total load.
6.3. Implementation of the Fuzzy Logic Controller
6.4. LMIs Results
- Khi for WREP
- Khi for HREP
- Khi for LREP
- Khi for WREP
- Khi for HREP
- Khi for LREP
- Khi for WREP
- Khi for HREP
- Khi for LREP
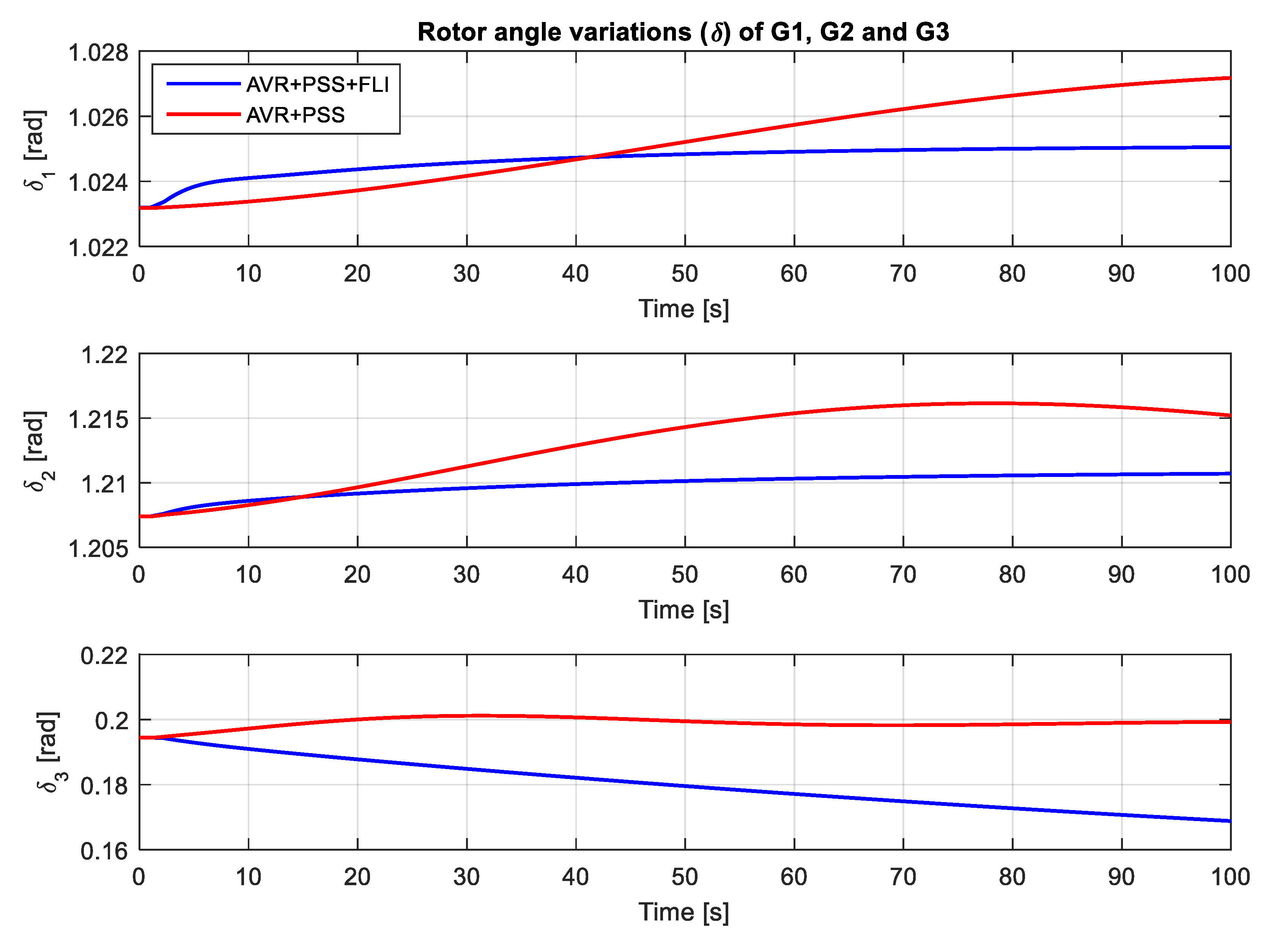
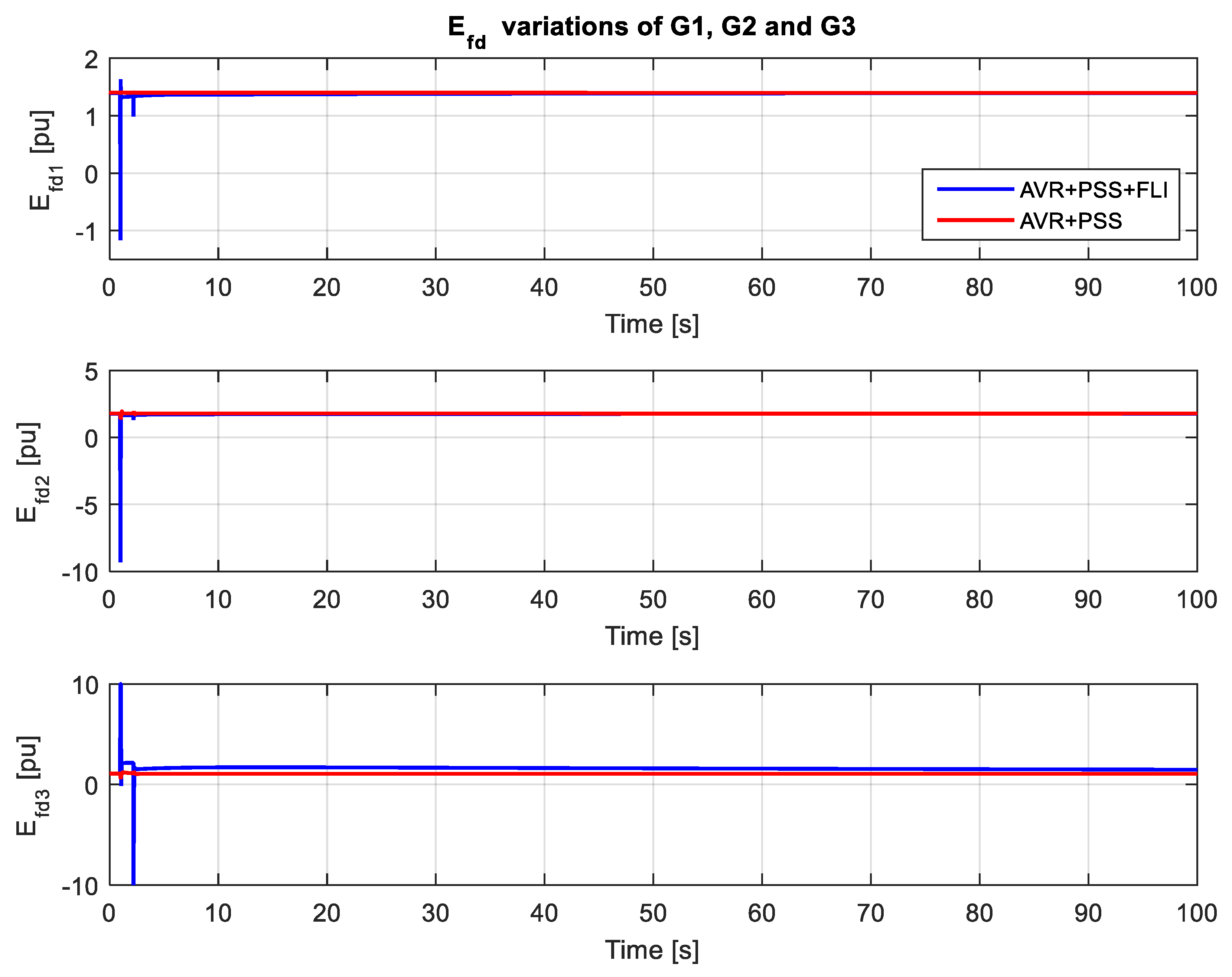
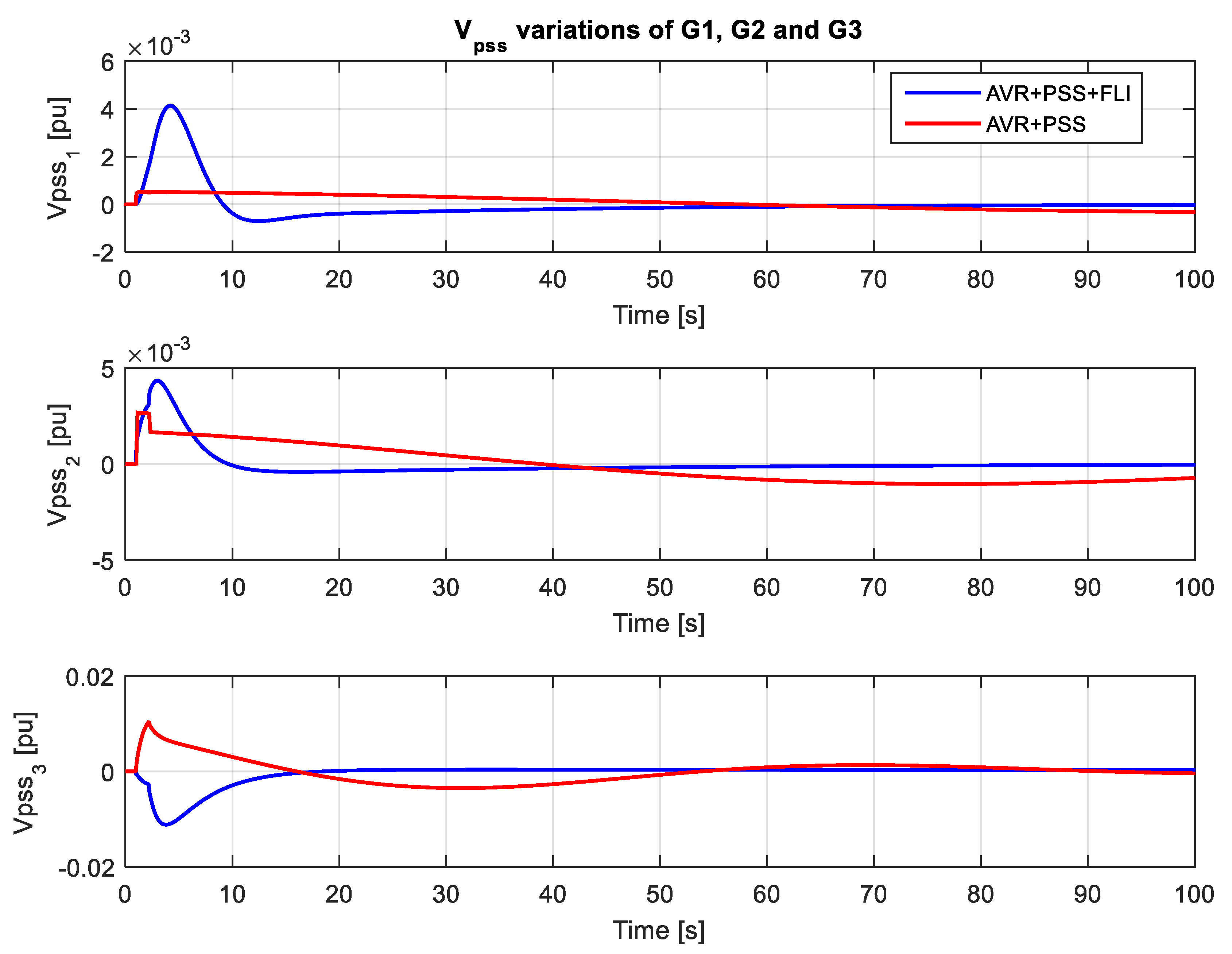
6.5. Nonlinear Time Simulations and Discussion
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Jafari, R.; Yu, W. Fuzzy control for uncertainty nonlinear systems with dual fuzzy equations. J. Intell. Fuzzy Syst. 2015, 29, 1229–1240. [Google Scholar] [CrossRef]
- Alshammari, B.; Salah, R.B.; Kahouli, O.; Kolsi, L. Design of fuzzy TS-PDC controller for electrical power system via rules reduction approach. Symmetry 2020, 12, 2068. [Google Scholar] [CrossRef]
- Saadatmand, M.; Gharehpetian, G.B.; Kamwa, I.; Siano, P.; Guerrero, J.M.; Alhelou, H.H. A Survey on FOPID controllers for LFO damping in Power systems using synchronous generators, FACTS devices and inverter-based power plants. Energies 2021, 14, 5983. [Google Scholar] [CrossRef]
- Gruenwald, B.C.; Yucelen, T.; De La Torre, G.; Jonathan, A.M. Adaptive control for uncertain dynamical systems with nonlinear reference systems. Int. J. Syst. Sci. 2020, 51, 687–703. [Google Scholar] [CrossRef]
- Liu, Y.; Jia, T.; Niu, Y.; Zou, Y. Design of sliding mode control for a class of uncertain switched systems. Int. J. Syst. Sci. 2015, 46, 993–1002. [Google Scholar] [CrossRef]
- Yan, T.H.; Wu, B.; He, B.; Li, W.H.; Wang, R.B. A Novel fuzzy sliding-mode control for discrete-time uncertain system. Math. Probl. Eng. 2016, 1530760, 1–9. [Google Scholar] [CrossRef]
- Wang, R.; Li, J.; Zhang, S.; Gao, D.; Sun, H. Robust adaptive control for a class of uncertain nonlinear systems with Time-Varying Delay. Sci. World J. 2013, 2013, 963986. [Google Scholar] [CrossRef] [Green Version]
- Pakmehr, M.; Yucelen, T. Adaptive control of uncertain systems with gain scheduled reference models and constrained control inputs. In Proceedings of the American Control Conference (ACC), Portland, OR, USA, 4–6 June 2014; IEEE: New York, NY, USA, 2014; pp. 691–696. [Google Scholar]
- Luo, X. Design of an adaptive controller for double-fed induction wind turbine power. Energy Rep. 2021, 7, 1622–1626. [Google Scholar] [CrossRef]
- Dong, F.; Zhao, X.; Han, J.; Chen, Y.H. Optimal fuzzy adaptive control for uncertain flexible joint manipulator based on D-operation. IET Control. Theory Appl. 2018, 12, 1286–1298. [Google Scholar] [CrossRef]
- Zhu, Q.; Song, A.G.; Zhang, T.P.; Yang, Y.Q. Fuzzy adaptive control of delayed high order nonlinear systems. Int. J. Autom. Comput. 2012, 9, 191–199. [Google Scholar] [CrossRef]
- Boulkroune, A.; Merazka, L.; Li, H. Fuzzy adaptive state-feedback control scheme of uncertain nonlinear multivariable Systems. IEEE Trans. Fuzzy Syst. 2019, 27, 1703–1713. [Google Scholar] [CrossRef]
- Shen, Q.; Shi, P.; Wang, S.; Shi, Y. Fuzzy adaptive control of a class of nonlinear systems with unmodeled dynamics. Int. J. Adapt. Control Signal Process. 2019, 33, 712–730. [Google Scholar] [CrossRef]
- Roman, R.C.; Precup, R.E.; Petriu, E.M. Hybrid data-driven fuzzy active disturbance rejection control for tower crane systems. Eur. J. Control. 2021, 58, 373–387. [Google Scholar] [CrossRef]
- Zhu, Z.; Pan, Y.; Zhou, Q.; Lu, C. Event-triggered adaptive fuzzy control for stochastic nonlinear systems with unmeasured states and unknown backlash-like Hysteresis. IEEE Trans. Fuzzy Syst. 2021, 29, 1273–1283. [Google Scholar] [CrossRef]
- Roy, S.; Kar, I.N. Robust time-delayed control of a class of uncertain nonlinear systems. IFAC-PapersOnLine 2016, 49, 736–741. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Laurain, T.; Palhares, R.; Lauber, J.; Sentouh, C.; Popieul, J.C. LMI-based control synthesis of constrained Takagi-Sugeno fuzzy systems subject to L2 or L∞ disturbances. Neurocomputing 2016, 207, 793–804. [Google Scholar] [CrossRef]
- Zhang, J.; Wang, X.; Shao, X. Design and real-time implementation of Takagi–Sugeno fuzzy controller for magnetic levitation ball system. IEEE Access. 2020, 8, 38221–38228. [Google Scholar] [CrossRef]
- Bourahala, F.; Guelton, K.; Khaber, F.; Manamanni, N. Improvements on PDC controller design for Takagi-Sugeno fuzzy systems with state time-varying delays. IFAC-PapersOnLine 2016, 49, 200–205. [Google Scholar] [CrossRef]
- Sambariya, D.K.; Prasad, R. A Novel fuzzy rule matrix design for fuzzy logic-based power system stabilizer. Electr. Power Compon. Syst. 2017, 45, 34–48. [Google Scholar] [CrossRef]
- Ansari, J.; Abbasi, A.R.; Heydari, M.H.; Avazzadeh, Z. Simultaneous design of fuzzy PSS and fuzzy STATCOM controllers for power system stability enhancement. Alex. Eng. J. 2022, 61, 2841–2850. [Google Scholar] [CrossRef]
- Morère, Y. Mise en Oeuvre de lois de Commande Pour les Modèles Flous de Type Takagi-Sugeno. Ph.D. Thesis, Université de Valenciennes et du Hainaut-Cambrésis, Valenciennes, France, 2001. [Google Scholar]
- Le Doeuff, R.; Zaïm, M.E.H. Rotating Electrical Machines; John Wiley & Sons: Hoboken, NJ, USA, 2010. [Google Scholar]
- Lee, D.; Hu, J. Local model predictive control for T–S fuzzy systems. IEEE Trans Cybern. 2017, 47, 2556–2567. [Google Scholar] [CrossRef] [PubMed]
- Ghadiri, H.; Khodadadi, H.; Mobayen, S.; Asad, J.H.; Rojsiraphisal, T.; Chang, A. Observer-based robust control method for switched neutral systems in the presence of interval time-varying delays. Mathematics 2021, 9, 2473. [Google Scholar] [CrossRef]
- Guesmi, T.; Farah, A.; Abdallah, H.H.; Ouali, A. Robust design of multimachine power system stabilizers based on improved non-dominated sorting genetic algorithms. Electr Eng. 2018, 100, 1351–1363. [Google Scholar] [CrossRef]
- Milano, F. PSAT Helps: Power System Analysis Toolbox Documentation for PSAT Version 2.0.0 _1. 2006. Available online: http://www.uclm.es/area/gsee/Web/Federico/psat.htm (accessed on 29 November 2020).





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gen #1 | Gen #2 | Gen #3 | |
|---|---|---|---|
| 1.2578 | 0.8645 | 0.0969 | |
| 1.3125 | 0.8958 | 0.1460 | |
| 0.1813 | 0.1198 | 0.0608 | |
| 0.1813 | 0.1198 | 0.0608 | |
| 5.89 | 6 | 8.96 | |
| 0.6 | 0.535 | 0.02 | |
| 3.1 | 6.4 | 23.26 | |
| 2 | 2 | 2 |
| G1 | G2 | G3 | |||
|---|---|---|---|---|---|
| 33.3345 | 27.0077 | 31.6110 | |||
| 9.5108 | 8.4639 | 6.9414 | |||
| 0.0560 | 0.0202 | 0.0562 | |||
| 0.0104 | 0.0155 | 0.0173 | |||
| 0.0781 | 0.0674 | 0.0576 | |||
| 0.0115 | 0.0185 | 0.0172 | |||
| 200 | 200 | 200 | |||
| 0.015 | 0.015 | 0.015 | |||
| Machine | Efd0 | E′qr0 | δ0 | Pm | VT | PT | QT |
|---|---|---|---|---|---|---|---|
| 1 | 1.3922 | 0.76624 | 1.0251 | 0.86903 | 1.025 | 0.85 | −0.11145 |
| 2 | 1.7623 | 0.78507 | 1.2109 | 1.6677 | 1.025 | 1.63 | 0.057331 |
| 3 | 1.0889 | 1.0553 | 0.13836 | 0.52505 | 1.04 | 0.51863 | 0.25618 |
| Case 1 | Case 2 | Case 3 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Machine | Rth | Xth | Vth | Rth | Xth | Vth | Rth | Xth | Vth |
| 1 | 0.027864 | 0.19513 | 1.0363 | 0.0278 | 0.1952 | 1.0366 | 0.0275 | 0.1953 | 1.0368 |
| 2 | 0.026888 | 0.19191 | 1.0179 | 0.0264 | 0.1921 | 1.0196 | 0.0253 | 0.1926 | 1.0233 |
| 3 | 0.045830 | 0.20345 | 0.97122 | 0.0446 | 0.2046 | 0.975 | 0.0415 | 0.2071 | 0.9877 |
| Premise Values | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| Machine | Penetration Level | N1min | N1max | N2min | N2max | N3min | N3max | N4min | N4max |
| 1 | WREP (case 1) | 0.0229 | 0.6906 | −0.5440 | −0.0552 | −5.3789 | −0.0342 | 0.7821 | 8.1494 |
| LREP (case 2) | 0.0229 | 0.6885 | −0.5346 | −0.0551 | −5.3815 | −0.0343 | 1.6178 | 11.0260 | |
| HREP (case 3) | 0.0229 | 0.6922 | −0.5442 | −0.0552 | −5.3800 | −0.0343 | 1.6181 | 11.0250 | |
| 2 | WREP (case 1) | 0.0121 | 0.4055 | −0.3183 | −0.0323 | −4.3158 | −0.0274 | 0.6119 | 7.5378 |
| LREP (case 2) | 0.0122 | 0.3983 | −0.3166 | −0.0321 | −4.3245 | −0.0275 | 1.5918 | 11.2810 | |
| HREP (case 3) | 0.0124 | 0.4123 | −0.3192 | −0.0323 | −4.3295 | −0.0276 | 1.5977 | 11.3140 | |
| 3 | WREP (case 1) | 0.0013 | 0.0894 | −0.1255 | −0.0125 | −0.3929 | −0.0025 | 0.3593 | 6.7092 |
| LREP (case 2) | 0.0013 | 0.0856 | −0.1233 | −0.0123 | −0.3918 | −0.0025 | 1.4981 | 9.1694 | |
| HREP (case 3) | 0.0014 | 0.0941 | −0.1255 | −0.0125 | −0.3903 | −0.0025 | 1.5198 | 9.2844 | |
| Machine | Penetration Level | α1m | α2m | α1r | α2r |
|---|---|---|---|---|---|
| 1 | WREP (case 1) | 0.3567 | −0.2996 | 0.3338 | 0.2444 |
| LREP (case 2) | 0.3557 | −0.2993 | 0.3328 | 0.2442 | |
| HREP (case 3) | 0.3576 | −0.2997 | 0.3346 | 0.2445 | |
| 2 | WREP (case 1) | 0.2088 | −0.1753 | 0.1967 | 0.1430 |
| LREP (case 2) | 0.2053 | −0.1744 | 0.1931 | 0.1422 | |
| HREP (case 3) | 0.2123 | −0.1758 | 0.2000 | 0.1434 | |
| 3 | WREP (case 1) | 0.0454 | −0.0690 | 0.0441 | 0.0565 |
| LREP (case 2) | 0.0435 | −0.0678 | 0.0422 | 0.0555 | |
| HREP (case 3) | 0.0478 | −0.0690 | 0.0464 | 0.0565 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guesmi, T.; Alshammari, B.M.; Welhazi, Y.; Hadj Abdallah, H.; Toumi, A. Robust Fuzzy Control for Uncertain Nonlinear Power Systems. Mathematics 2022, 10, 1463. https://doi.org/10.3390/math10091463
Guesmi T, Alshammari BM, Welhazi Y, Hadj Abdallah H, Toumi A. Robust Fuzzy Control for Uncertain Nonlinear Power Systems. Mathematics. 2022; 10(9):1463. https://doi.org/10.3390/math10091463
Chicago/Turabian StyleGuesmi, Tawfik, Badr M. Alshammari, Yosra Welhazi, Hsan Hadj Abdallah, and Ahmed Toumi. 2022. "Robust Fuzzy Control for Uncertain Nonlinear Power Systems" Mathematics 10, no. 9: 1463. https://doi.org/10.3390/math10091463
APA StyleGuesmi, T., Alshammari, B. M., Welhazi, Y., Hadj Abdallah, H., & Toumi, A. (2022). Robust Fuzzy Control for Uncertain Nonlinear Power Systems. Mathematics, 10(9), 1463. https://doi.org/10.3390/math10091463