
Directional Difference Convolution and Its Application on Face Anti-Spoofing



Abstract
:1. Introduction
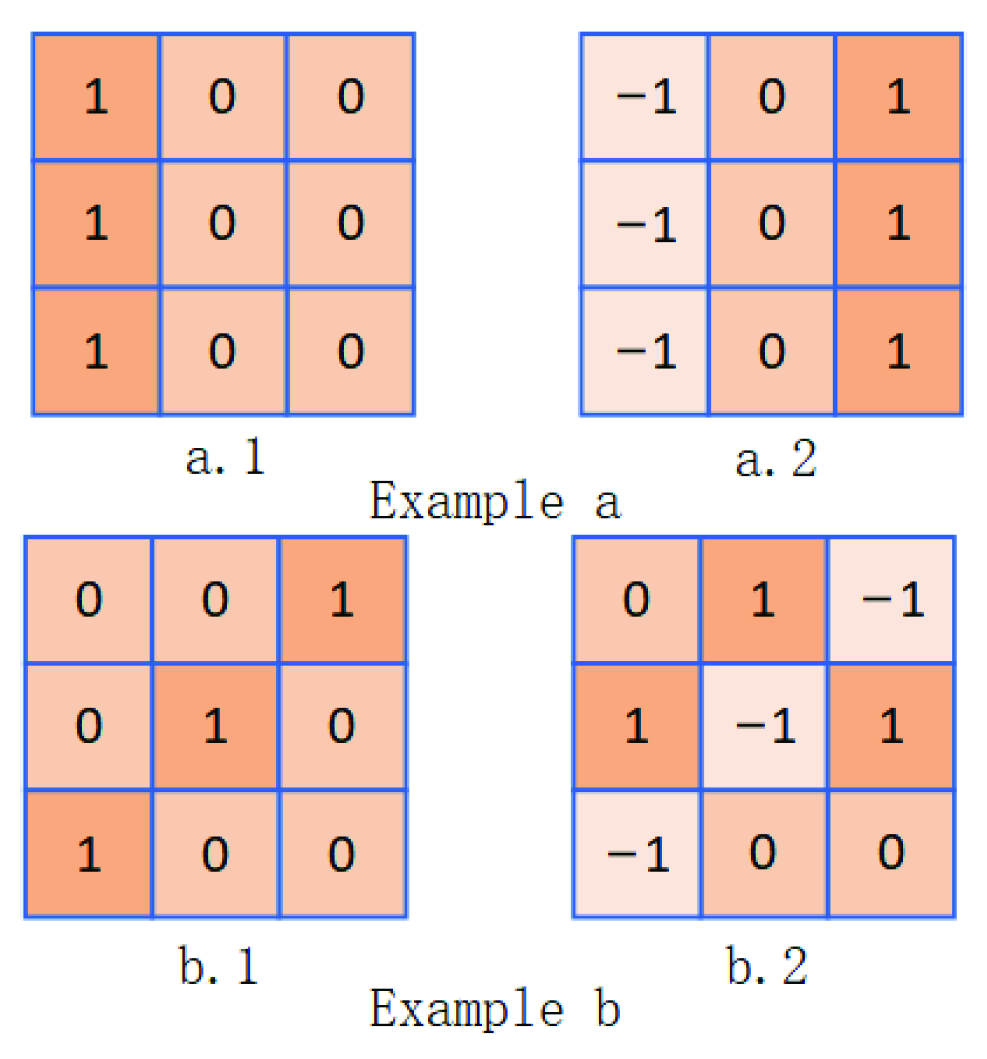
- DDC is proposed to extract the main gradient information from image through the difference operation on pixels.
- To balance the propertion of traditional convolution and DDC and further improve the overall performance, the two convolutions are weighted and optimized by a parameter. Experiments show that DDC could make up for the deficiency of traditional convolution and improve the feature extraction capability of convolution layer.
2. Related Work
2.1. Face Anti-Spoofing
2.2. Convolution Operations
3. DDC and Combined Convolution
3.1. Traditional Convolution
3.2. Directional Difference Convolution
3.3. Combined Convolution
3.4. The Network Structure
4. Experiment
4.1. The Datasets
4.2. Test Metrics
4.3. Experimental Process
4.4. Experimental Methods and Hyperparameter Settings
- Test the effect of various values;
- Cross-type testing among various types within the datasets;
- Cross-type testing between different types of datasets.
5. Experimental Results
5.1. The Effect of
5.2. Cross-Type Testing among Various Types within the Datasets
5.3. Cross-Type Testing between Different Types of Datasets
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jiang, F.; Liu, P.; Zhou, X. A Review on Face Anti-spoofing. Acta Autom. Sin. 2021, 47, 1799–1821. [Google Scholar] [CrossRef]
- Ministry of Public Security of the People’s Republic of China. Face Recognition Applications in Security Systems—Testing Methodologies for Anti-Spoofing, GA/T 1212-2014. 2014. Available online: https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=SCHF&dbname=SCHF&filename=SCHF2016110569&uniplatform=NZKPT&v=EoByl325oT1PAAFBPwr0Ypcrw3SsIcVSzcUL2R2GKgY1PvNDB1i0Vj_UcV-IFs8y (accessed on 15 December 2021).
- Liu, Y.; Stehouwer, J.; Jourabloo, A.; Liu, X. Deep Tree Learning for Zero-Shot Face Anti-Spoofing. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019; pp. 4675–4684. [Google Scholar] [CrossRef] [Green Version]
- Arashloo, S.R.; Kittler, J. An anomaly detection approach to face spoofing detection: A new formulation and evaluation protocol. In Proceedings of the 2017 IEEE International Joint Conference on Biometrics (IJCB), Denver, CO, USA, 1–4 October 2017; pp. 80–89. [Google Scholar] [CrossRef]
- Boulkenafet, Z.; Komulainen, J.; Li, L.; Feng, X.; Hadid, A. OULU-NPU: A Mobile Face Presentation Attack Database with Real-World Variations. In Proceedings of the 2017 12th IEEE International Conference on Automatic Face Gesture Recognition (FG 2017), Washington, DC, USA, 30 May–3 June 2017; pp. 612–618. [Google Scholar] [CrossRef] [Green Version]
- Xiong, F.; AbdAlmageed, W. Unknown Presentation Attack Detection with Face RGB Images. In Proceedings of the 2018 IEEE 9th International Conference on Biometrics Theory, Applications and Systems (BTAS), Redondo Beach, CA, USA, 22–25 October 2018; pp. 1–9. [Google Scholar] [CrossRef]
- Määttä, J.; Hadid, A.; Pietikäinen, M. Face spoofing detection from single images using micro-texture analysis. In Proceedings of the 2011 International Joint Conference on Biometrics (IJCB), Washington, DC, USA, 11–13 October 2011; pp. 1–7. [Google Scholar] [CrossRef]
- de Freitas Pereira, T.; Anjos, A.; De Martino, J.M.; Marcel, S.b. LBP-TOP Based Countermeasure against Face Spoofing Attacks. In Computer Vision-ACCV 2012 Workshops; Park, J.I., Kim, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 121–132. [Google Scholar]
- Yang, J.; Lei, Z.; Liao, S.; Li, S.Z. Face liveness detection with component dependent descriptor. In Proceedings of the 2013 International Conference on Biometrics (ICB), Madrid, Spain, 4–7 June 2013; pp. 1–6. [Google Scholar] [CrossRef]
- Bharadwaj, S.; Dhamecha, T.I.; Vatsa, M.; Singh, R. Computationally Efficient Face Spoofing Detection with Motion Magnification. In Proceedings of the 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops, Portland, OR, USA, 23–28 June 2013; pp. 105–110. [Google Scholar] [CrossRef]
- Yang, J.; Lei, Z.; Li, S.Z. Learn Convolutional Neural Network for Face Anti-Spoofing. arXiv 2014, arXiv:1408.5601. [Google Scholar]
- LeCun, Y.; Boser, B.; Denker, J.S.; Henderson, D.; Howard, R.E.; Hubbard, W.; Jackel, L.D. Backpropagation Applied to Handwritten Zip Code Recognition. Neural Comput. 1989, 1, 541–551. [Google Scholar] [CrossRef]
- Li, X.; Komulainen, J.; Zhao, G.; Yuen, P.C.; Pietikäinen, M. Generalized face anti-spoofing by detecting pulse from face videos. In Proceedings of the 2016 23rd International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 4–8 December 2016; pp. 4244–4249. [Google Scholar] [CrossRef] [Green Version]
- Liu, Y.; Jourabloo, A.; Liu, X. Learning Deep Models for Face Anti-Spoofing: Binary or Auxiliary Supervision. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 389–398. [Google Scholar] [CrossRef] [Green Version]
- Yu, Z.; Zhao, C.; Wang, Z.; Qin, Y.; Su, Z.; Li, X.; Zhou, F.; Zhao, G. Searching Central Difference Convolutional Networks for Face Anti-Spoofing. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 13–19 June 2020; pp. 5294–5304. [Google Scholar] [CrossRef]
- Farid, H.; Simoncelli, E.P. Optimally rotation-equivariant directional derivative kernels. In Computer Analysis of Images and Patterns; Sommer, G., Daniilidis, K., Pauli, J., Eds.; Springer: Berlin/Heidelberg, Germany, 1997; pp. 207–214. [Google Scholar]
- Sobel, I.; Feldman, G. An Isotropic 3 × 3 Image Gradient Operator. In Presentation at Stanford A.I. Project 1968. 2015. Available online: https://www.semanticscholar.org/paper/An-Isotropic-3%C3%973-image-gradient-operator-Sobel-Feldman/1ab70add6ba3b85c2ab4f5f6dc1a448e57ebeb30 (accessed on 15 December 2021).
- Wang, X.; Li, X. Generalized Confidence Intervals for Zero-Inflated Pareto Distribution. Mathematics 2021, 9, 3272. [Google Scholar] [CrossRef]
- Tian, R.; Sun, G.; Liu, X.; Zheng, B. Sobel Edge Detection Based on Weighted Nuclear Norm Minimization Image Denoising. Electronics 2021, 10, 655. [Google Scholar] [CrossRef]
- Vapnik, V.N. Statistical Learning Theory; Wiley-Interscience: New York, NY, USA, 1998. [Google Scholar]
- Zaremba, W.; Sutskever, I.; Vinyals, O. Recurrent Neural Network Regularization. arXiv 2014, arXiv:1409.2329. [Google Scholar]
- Liu, H.; Simonyan, K.; Yang, Y. DARTS: Differentiable Architecture Search. arXiv 2019, arXiv:1806.09055. [Google Scholar]
- Xu, Y.; Xie, L.; Zhang, X.; Chen, X.; Qi, G.J.; Tian, Q.; Xiong, H. PC-DARTS: Partial Channel Connections for Memory-Efficient Architecture Search. arXiv 2019, arXiv:1907.05737. [Google Scholar]
- Yu, F.; Koltun, V. Multi-Scale Context Aggregation by Dilated Convolutions. arXiv 2016, arXiv:1511.07122. [Google Scholar]
- Dai, J.; Qi, H.; Xiong, Y.; Li, Y.; Zhang, G.; Hu, H.; Wei, Y. Deformable Convolutional Networks. arXiv 2017, arXiv:1703.06211. [Google Scholar]
- Juefei-Xu, F.; Boddeti, V.N.; Savvides, M. Local Binary Convolutional Neural Networks. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4284–4293. [Google Scholar] [CrossRef] [Green Version]
- Su, Z.; Liu, W.; Yu, Z.; Hu, D.; Liao, Q.; Tian, Q.; Pietikäinen, M.; Liu, L. Pixel difference networks for efficient edge detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, QC, Canada, 11–17 October 2021; pp. 5117–5127. [Google Scholar]
- Zhang, Z.; Yan, J.; Liu, S.; Lei, Z.; Yi, D.; Li, S.Z. A face antispoofing database with diverse attacks. In Proceedings of the 2012 5th IAPR International Conference on Biometrics (ICB), New Delhi, India, 29 March–1 April 2012; pp. 26–31. [Google Scholar] [CrossRef]
- Chingovska, I.; Anjos, A.; Marcel, S. On the effectiveness of local binary patterns in face anti-spoofing. In Proceedings of the 2012 BIOSIG-Proceedings of the International Conference of Biometrics Special Interest Group (BIOSIG), Darmstadt, Germany, 15–17 September 2012; pp. 1–7. [Google Scholar]
- Wen, D.; Han, H.; Jain, A. Face Spoof Detection With Image Distortion Analysis. IEEE Trans. Inf. Forensics Secur. 2015, 10. [Google Scholar] [CrossRef]
- International Organization for Standardization. ISO/IEC JTC 1/SC 37 Biometrics: Information Technology Biometric Presentation Attack Detection Part 1: Framework. 2016. Available online: https://www.iso.org/obp/ui/iso (accessed on 15 December 2021).
- Feng, Y.; Wu, F.; Shao, X.; Wang, Y.; Zhou, X. Joint 3D Face Reconstruction and Dense Alignment with Position Map Regression Network. In Computer Vision–ECCV 2018; Ferrari, V., Hebert, M., Sminchisescu, C., Weiss, Y., Eds.; Springer International Publishing: Cham, Swizterland, 2018; pp. 557–574. [Google Scholar]
- Wu, X.; Hu, W. Attention-based hot block and saliency pixel convolutional neural network method for face anti-spoofing. Comput. Sci. 2021, 48, 9. [Google Scholar]
- Sun, W.; Song, Y.; Chen, C.; Huang, J.; Kot, A.C. Face Spoofing Detection Based on Local Ternary Label Supervision in Fully Convolutional Networks. IEEE Trans. Inf. Forensics Secur. 2020, 15, 3181–3196. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Object | Attack Type | Video | ||
|---|---|---|---|---|---|
| Real | Fake | Total | |||
| CASIA-MFSD | 50 | Wrapped photo Cut photo Video | 150 | 450 | 600 |
| Replay-Attack | 50 | Printed photo Digital photo Video | 200 | 1000 | 1200 |
| MSU-MFSD | 35 | Printed photo HR video Mobile photo | 110 | 330 | 440 |
| Oulu-NPU | 55 | Printed photo Video | 1980 | 3960 | 5940 |
| Hyperparameter | Test the Effect of Various Values | Intra Test | Inter Test |
|---|---|---|---|
| gpu number | 3 | 3 | 3 |
| initial learning rate | 0.0002 | 0.0002 | 0.0002 |
| kernel size | |||
| 0.6 | 0.6 | ||
| batch size | 8 | 8 | 8 |
| step size | 300 | 200 | 200 |
| gamma | 0.5 | 0.5 | 0.5 |
| epochs | 1200 | 600 | 600 |
| Method | CASIA-MFSD | Replay-Attack | MSU-MFSD | Overall | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Video | Cut Photo | Wrapped Photo | Video | Digital Photo | Printed Photo | Printed Photo | HR Video | Mobile Video | ||
| OC-+BSIF [4] | 70.74 | 60.73 | 95.90 | 84.03 | 88.14 | 73.66 | 64.81 | 87.44 | 74.69 | 78.68 ± 11.74 |
| +LBP [5] | 91.94 | 91.70 | 84.47 | 99.08 | 98.17 | 87.28 | 47.68 | 99.50 | 97.61 | 88.55 ± 16.2 |
| NN+LBP [6] | 94.16 | 88.39 | 79.85 | 99.75 | 95.17 | 78.86 | 50.57 | 99.93 | 93.54 | 86.69 ± 16.25 |
| DTN [3] | 90.0 | 97.30 | 97.50 | 99.90 | 99.90 | 99.60 | 81.60 | 99.90 | 97.50 | 95.90 ± 6.2 |
| Wu’s fusion [33] | 90.69 | 98.96 | 97.91 | 99.99 | 99.98 | 99.72 | − | − | − | − |
| SAPLC [34] | 90.67 | 92.67 | 90.67 | 96.25 | 97.75 | 87.50 | − | − | − | − |
| CDCN [15] | 98.48 | 99.90 | 99.80 | 100.00 | 99.43 | 99.92 | 70.82 | 100.00 | 99.99 | 96.48 ± 9.64 |
| CDCN++ [15] | 98.07 | 99.90 | 99.60 | 99.98 | 99.89 | 99.98 | 72.29 | 100.00 | 99.98 | 96.63 ± 9.15 |
| OURS | 100.00 | 100.00 | 100.00 | 99.99 | 99.48 | 99.48 | 87.29 | 100.00 | 100.00 | 98.47 ± 3.96 |
| Method | CASIA-MFSD | Replay-Attack | MSU-MFSD | Overall | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Video | Cut Photo | Wrapped Photo | Video | Digital Photo | Printed Photo | Printed Photo | HR Video | Mobile Video | ||
| OC-+BSIF [4] | 67.59 | 51.01 | 96.33 | 46.54 | 63.24 | 38.88 | 62.06 | 80.56 | 64.06 | 63.36 ± 17.46 |
| +LBP [5] | 77.41 | 87.14 | 69.48 | 69.64 | 73.31 | 71.85 | 55.39 | 96.02 | 94.88 | 77.24 ± 13.24 |
| NN+LBP [6] | 71.80 | 70.26 | 67.55 | 36.93 | 75.43 | 69.45 | 26.10 | 96.84 | 85.31 | 66.63 ± 22.11 |
| GMM+LBP [6] | 65.41 | 85.00 | 50.15 | 60.78 | 61.46 | 55.32 | 59.35 | 91.18 | 86.43 | 68.34 ± 15.09 |
| OC-+LBP [6] | 64.94 | 85.75 | 55.15 | 84.83 | 72.62 | 57.34 | 60.90 | 68.41 | 75.51 | 69.49 ± 11.15 |
| AE+LBP [6] | 77.72 | 80.30 | 52.92 | 79.67 | 54.92 | 52.71 | 55.67 | 87.94 | 92.18 | 70.45 ± 16.18 |
| CDCN [15] | 85.69 | 67.90 | 69.93 | 88.41 | 92.39 | 96.06 | 72.86 | 99.21 | 99.04 | 85.72 ± 11.78 |
| CDCN++ [15] | 82.77 | 68.82 | 70.28 | 91.58 | 90.61 | 97.40 | 72.21 | 99.05 | 99.86 | 85.84 ± 11.95 |
| OURS | 86.83 | 75.34 | 73.88 | 78.97 | 91.73 | 96.37 | 79.70 | 98.93 | 98.93 | 86.74 ± 8.64 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, M.; Li, X.; Zhao, D.; Li, Y. Directional Difference Convolution and Its Application on Face Anti-Spoofing. Mathematics 2022, 10, 365. https://doi.org/10.3390/math10030365
Yang M, Li X, Zhao D, Li Y. Directional Difference Convolution and Its Application on Face Anti-Spoofing. Mathematics. 2022; 10(3):365. https://doi.org/10.3390/math10030365
Chicago/Turabian StyleYang, Mingye, Xian Li, Dongjie Zhao, and Yan Li. 2022. "Directional Difference Convolution and Its Application on Face Anti-Spoofing" Mathematics 10, no. 3: 365. https://doi.org/10.3390/math10030365
APA StyleYang, M., Li, X., Zhao, D., & Li, Y. (2022). Directional Difference Convolution and Its Application on Face Anti-Spoofing. Mathematics, 10(3), 365. https://doi.org/10.3390/math10030365