
Adaptive Fuzzy Iterative Learning Control for Systems with Saturated Inputs and Unknown Control Directions


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Problem Description
2.1. System Model and Input Saturation Model
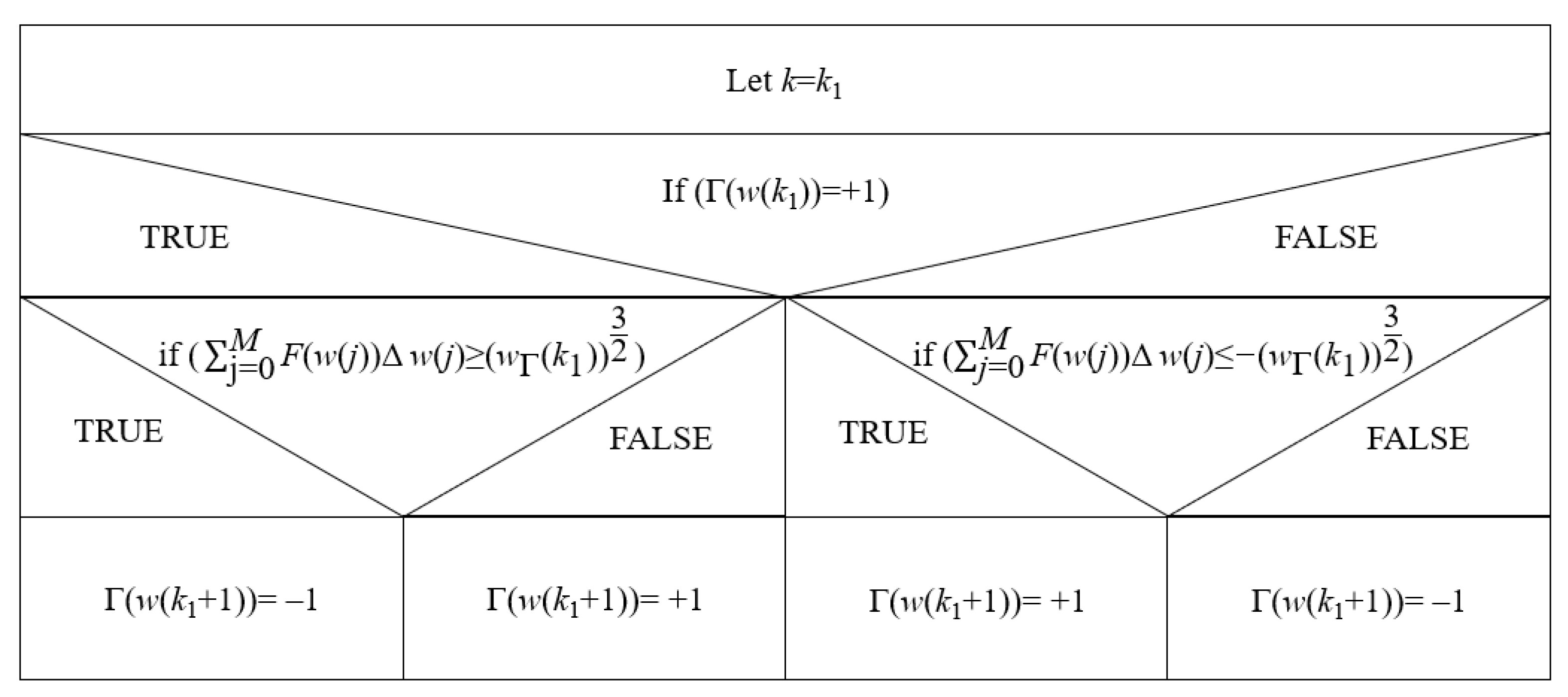
2.2. Nussbaum Gain Function
2.3. Approximation Based on Fuzzy Systems
2.4. The System Transformation
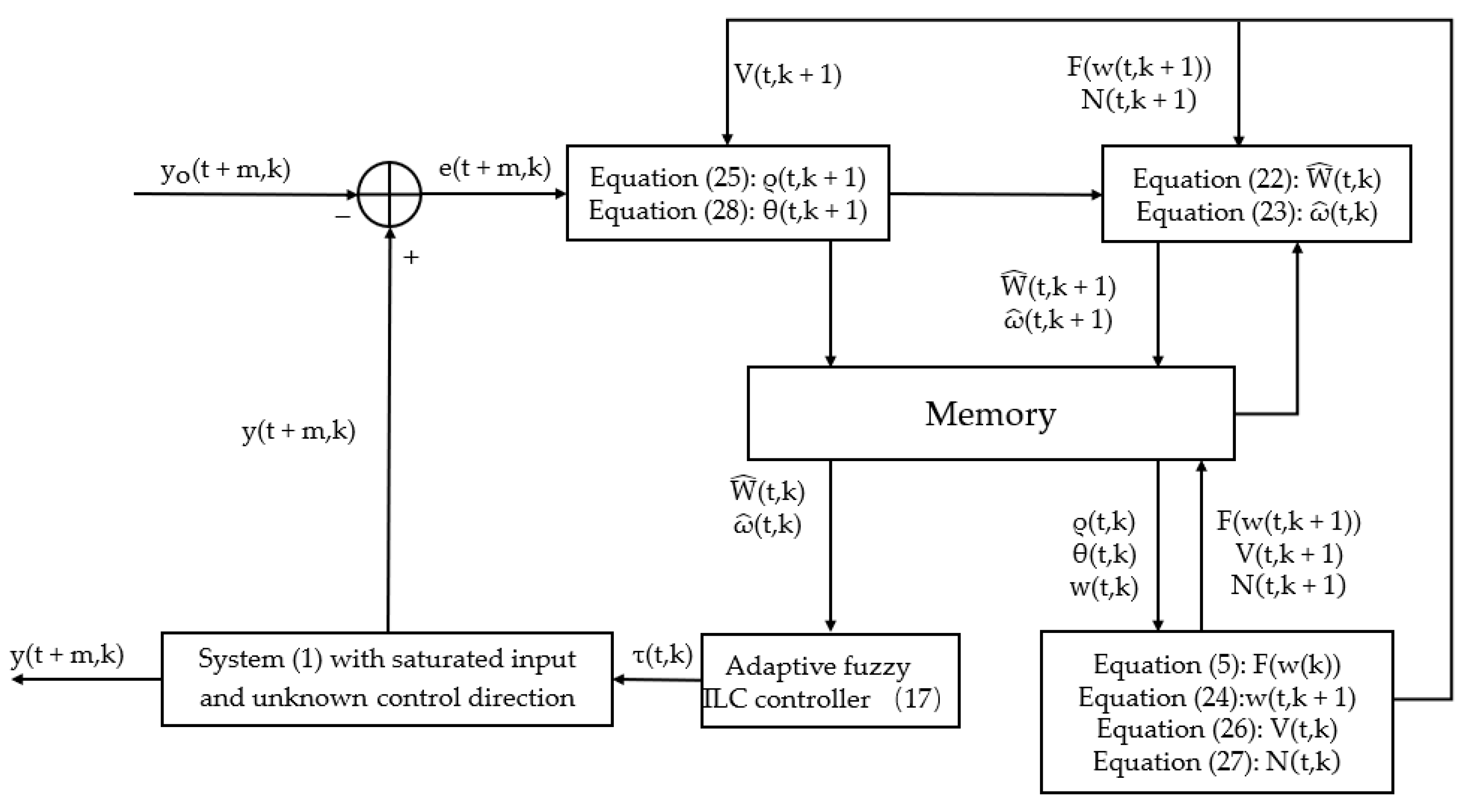
3. Adaptive Fuzzy ILC Design and Analysis
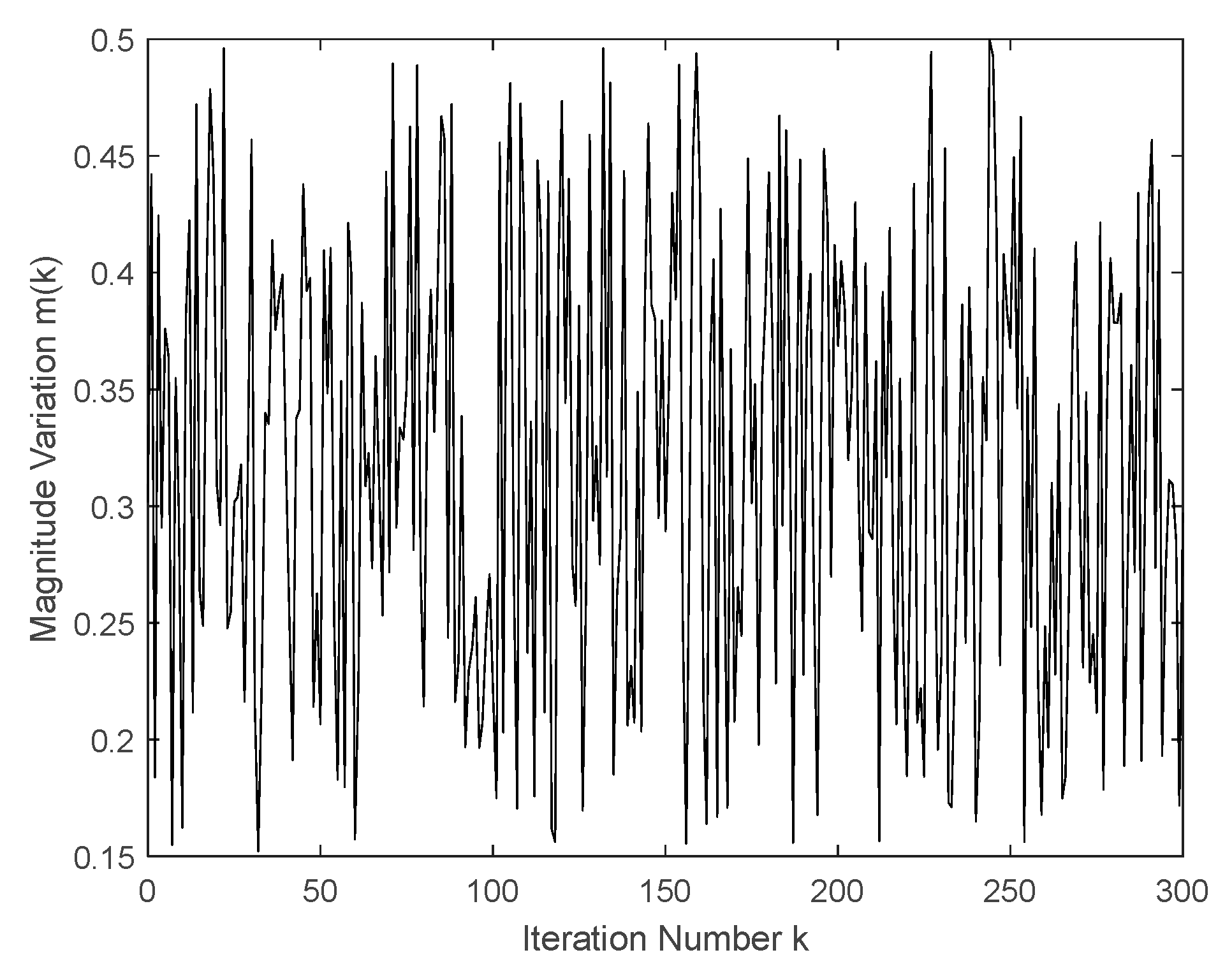
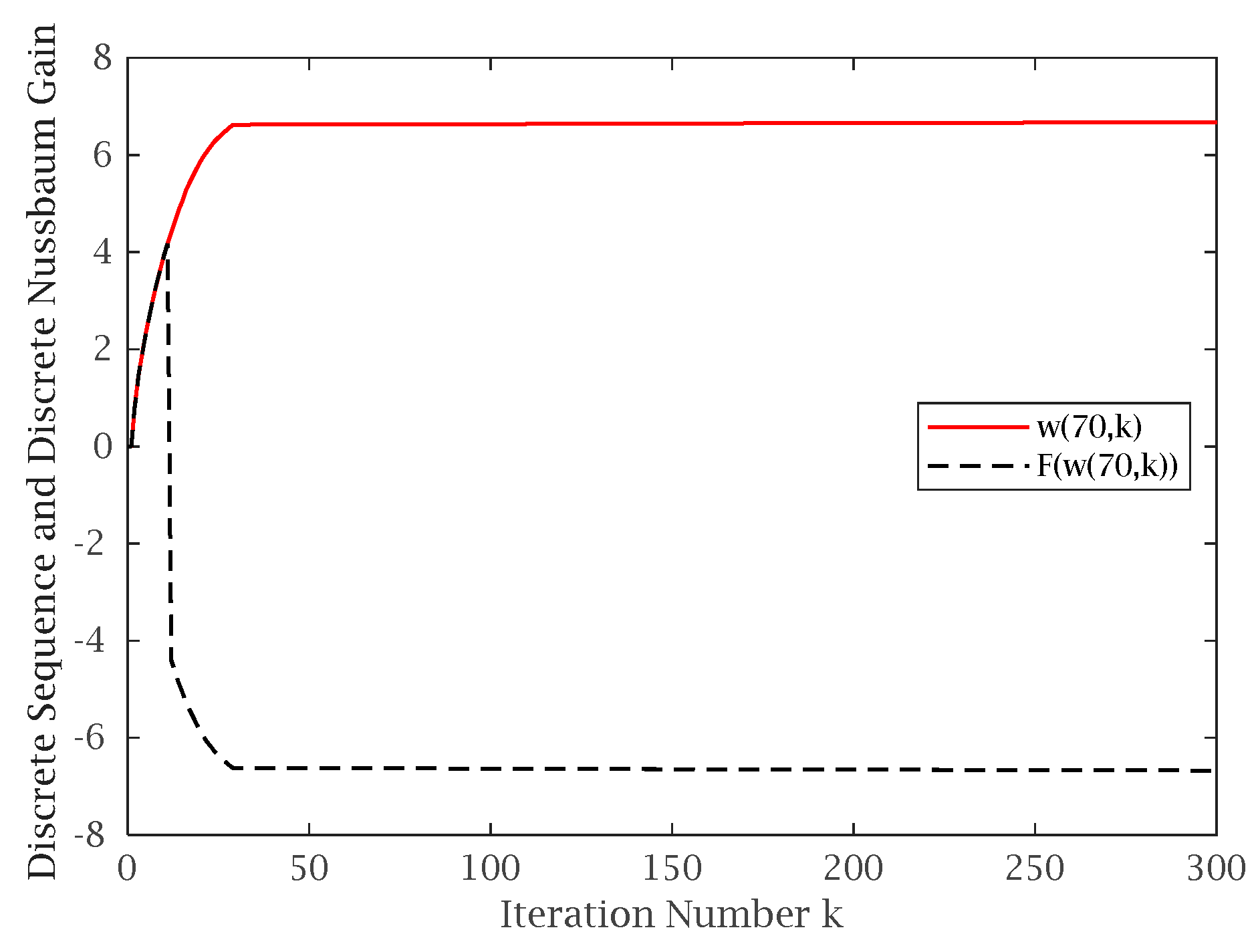
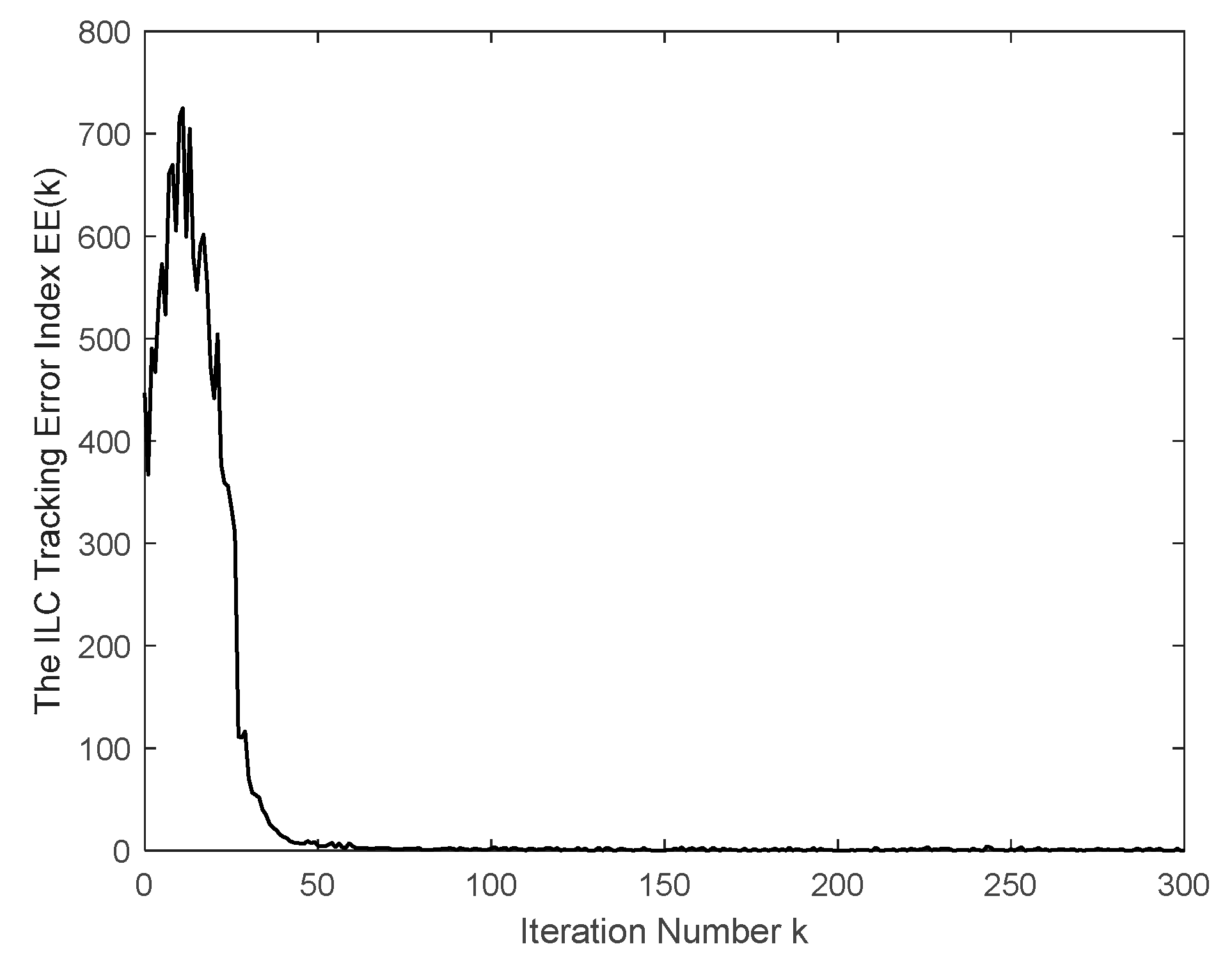
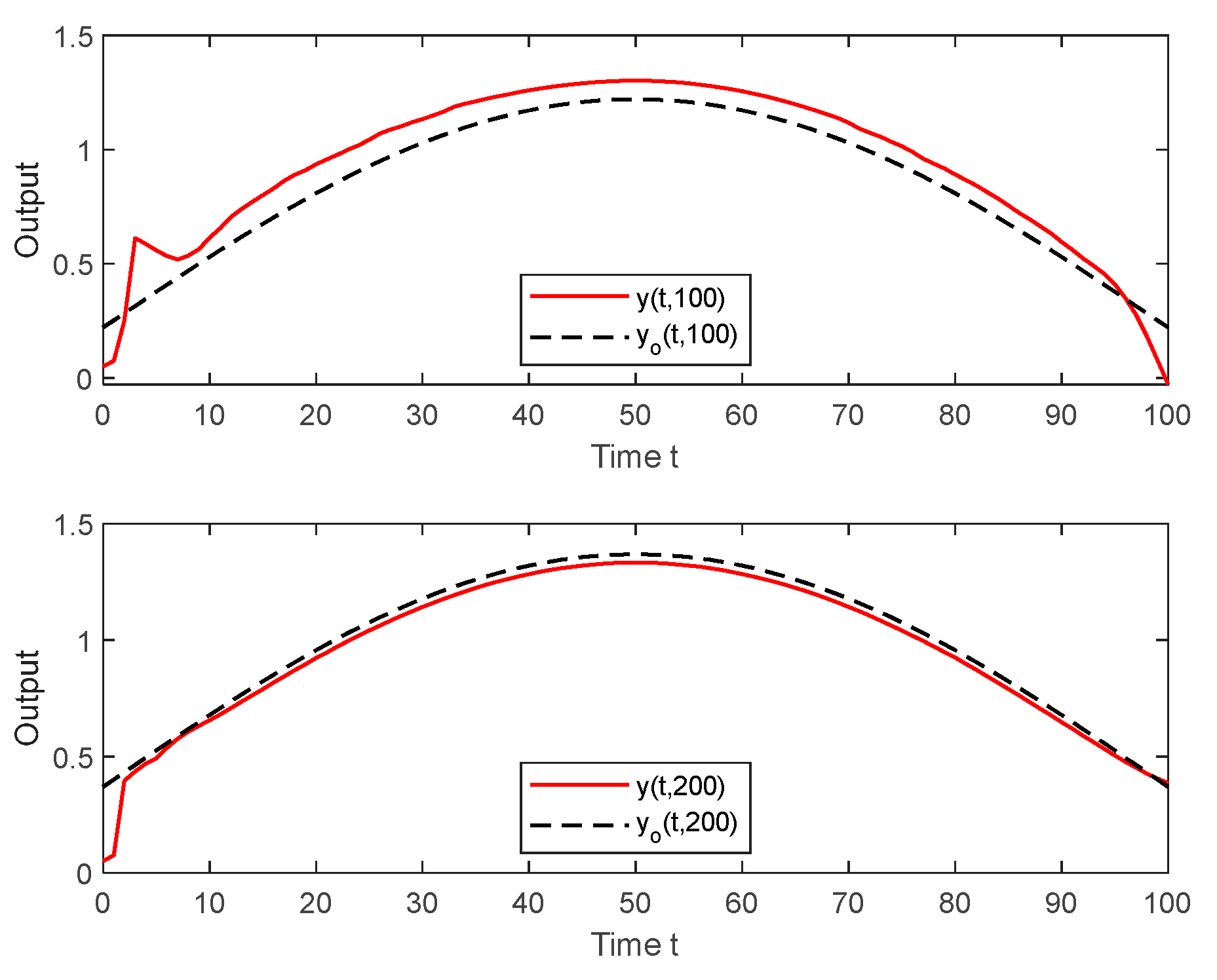
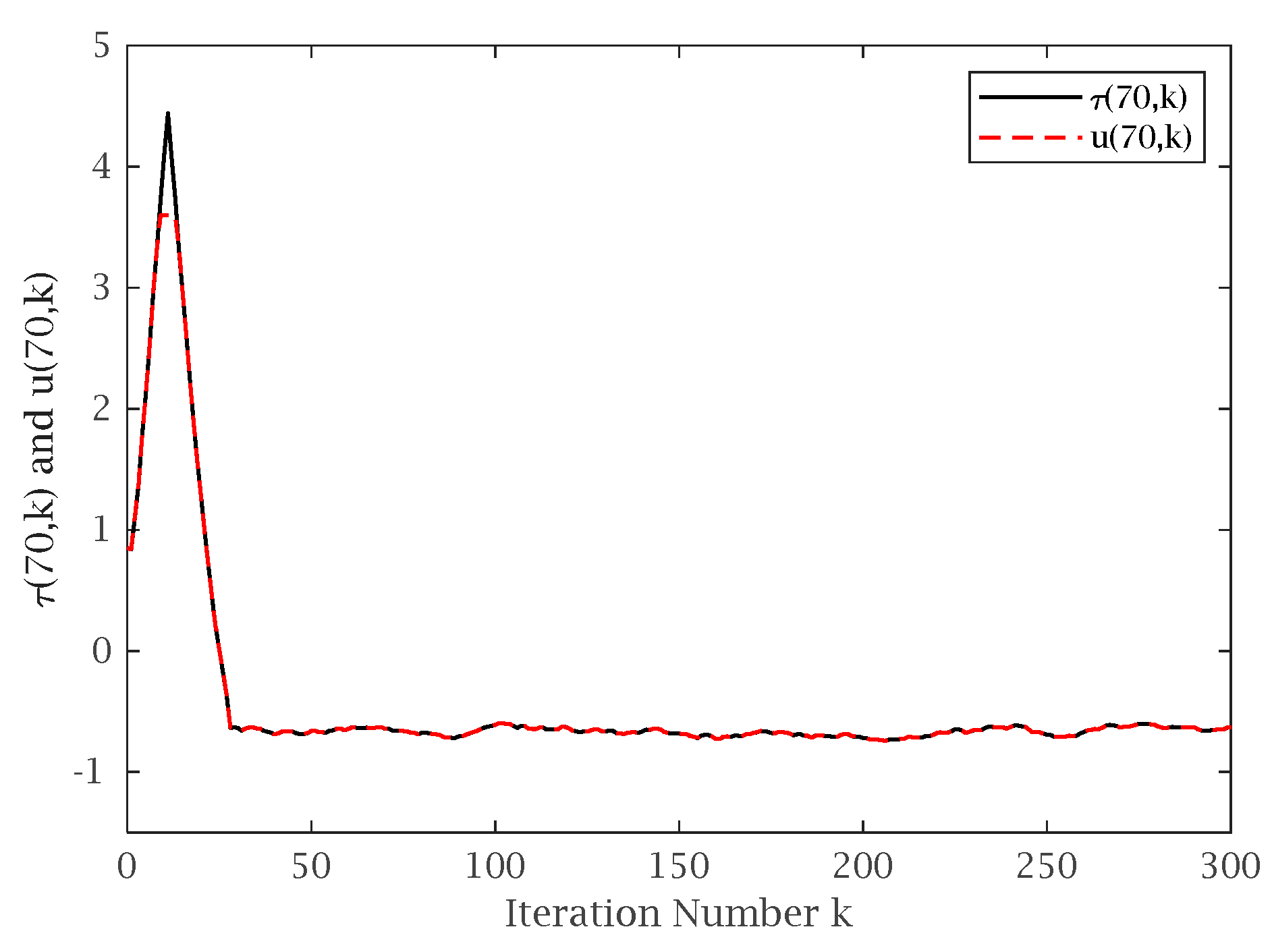
4. Simulation Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A. Proof of Theorem 1
References
- Wang, L.; Guo, Y.; Ma, G.; Liu, W. Overview of input saturation in spacecraft attitude control. J. Astronaut. 2021, 42, 11–21. [Google Scholar]
- Zhou, Z.; Shao, S.; Hu, W. Dynamic surface control of fighter in large maneuver under input saturation. J. Beijing Univ. Aeronaut. Astronaut. 2021, 47, 247–254. [Google Scholar]
- Yang, H.; Pei, H. Nonlinear dynamic inverse control for a class of input saturated nonaffine non-linear systems. Control Theory Appl. 2021, 38, 425–432. [Google Scholar]
- Xu, Y.; Yu, J.; Cui, Y.; Yu, J.; Liu, J. PMSM command filter discrete control considering input saturation. Small Spec. Electr. Mach. 2021, 49, 50–55. [Google Scholar]
- Zhang, X.; Fang, Y.; Zhang, X.; Jiang, J.; Hua, H. Input saturation control of rotor UAV based on error state Kalman filter estimation. Robot 2020, 42, 394–405. [Google Scholar]
- Alattas, K.A.; Vu, M.T.; Mofid, O.; El-Sousy, F.F.M.; Fekih, A.; Mobayen, S. Barrier function-based nonsingular finite-time tracker for quadrotor UAVs subject to uncertainties and input constraints. Mathematics 2022, 10, 1659–1674. [Google Scholar] [CrossRef]
- Zhao, Z.; He, X.; Ren, Z.; Wen, G. Boundary adaptive robust control of a flexible riser system with input nonlinearities. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1971–1980. [Google Scholar] [CrossRef]
- Zhao, Z.; Liu, Y.; Zou, T.; Hong, K.-S.; Li, H.-X. Robust adaptive fault-tolerant control for a riser-vessel system with input hysteresis and time-varying output constraints. IEEE Trans. Cybern. 2022, 52, 1–12. [Google Scholar] [CrossRef]
- Zhao, Z.; Ren, Y.; Mu, C.; Zou, T.; Hong, K.-S. Adaptive neural-network-based fault-tolerant control for a flexible string with composite disturbance observer and input constraints. IEEE Trans. Cybern. 2021, 51, 1–11. [Google Scholar] [CrossRef]
- Mohammadzamani, F.; Hashemi, M.; Shahgholian, G. Adaptive neural control of non-linear fractional order multi-agent systems in the presence of error constraints and input saturation. IET Control Theory Appl. 2022, 16, 1283–1298. [Google Scholar] [CrossRef]
- Mohammadzamani, F.; Hashemi, M.; Shahgholian, G. Adaptive control of nonlinear time-delay systems in the presence of output constraints and actuators faults. Int. J. Control 2021, 94, 1–13. [Google Scholar] [CrossRef]
- Janbazi, V.; Hashemi, M. Design of disturbance observer based on adaptive-neural control for large-scale time-delay systems in the presence of actuator fault and unknown dead zone. Int. J. Adapt. Control Signal Process. 2021, 35, 285–309. [Google Scholar] [CrossRef]
- Nazemorroaya, E.; Hashemi, M. Adaptive sliding mode controller design for the bipartite consensus tracking of multi-agent systems with actuator faults and disturbances. Int. J. Autom. Control 2022, 16, 288–302. [Google Scholar] [CrossRef]
- Li, X.; Shen, D.; Xu, J.X. Adaptive iterative learning control for MIMO nonlinear systems performing iteration-varying tasks. J. Frankl. Inst. 2019, 356, 9206–9231. [Google Scholar] [CrossRef]
- Li, L.; Cao, F.; Liu, J. Vibration control of flexible manipulator with unknown control direction. Int. J. Control 2020, 94, 2690–2702. [Google Scholar] [CrossRef]
- Ye, H.; Jiang, B. Adaptive switching control for hypersonic vehicle with uncertain control direction. J. Frankl. Inst. 2020, 357, 8851–8869. [Google Scholar] [CrossRef]
- Deng, X.; Zhang, X. Adaptive fuzzy tracking control of uncertain nonlinear multi-agent systems with unknown control directions and a dead-zone fault. Mathematics 2022, 10, 2655–2673. [Google Scholar] [CrossRef]
- Yun, H.; Yoo, S. Tracking control strategy using filter-based approximation for the unknown control direction problem of uncertain pure-feedback nonlinear systems. Mathematics 2020, 8, 1341–1357. [Google Scholar]
- Pang, M.; An, S. Decentralized lane changing and speed guidance methods for expressway and adjacent intersections. J. Transp. Syst. Eng. Inf. Technol. 2019, 19, 168–175. [Google Scholar]
- Chen, Q.; Cao, Y.; Wu, C. Adaptive sliding mode control of electromechanical servo system based on variable speed reaching law. Control Decis. 2022, 37, 1067–1073. [Google Scholar]
- Mishra, S.; Topcu, U.; Tomizuka, M. Iterative learning control with saturation constraints. In Proceedings of the American Control Conference, St. Louis, MO, USA, 10–12 June 2009; pp. 943–948. [Google Scholar]
- Mishra, S.; Topcu, U.; Tomizuka, M. Optimization-based constrained iterative learning control. IEEE Trans. Control Syst. Technol. 2011, 19, 1613–1621. [Google Scholar] [CrossRef]
- Zhang, J.; Meng, D. Convergence analysis of saturated iterative learning control systems with locally Lipschitz nonlinearities. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 4025–4035. [Google Scholar] [CrossRef] [PubMed]
- Zhang, R.; Hou, Z.; Chi, R.; Ji, H. Adaptive iterative learning control for nonlinearly parameterised systems with unknown time-varying delays and input saturations. Int. J. Control 2015, 88, 1133–1141. [Google Scholar] [CrossRef]
- Zhang, R.; Hou, Z.; Ji, H.; Yin, C. Adaptive iterative learning control for a class of non-linearly parameterised systems with input saturations. Int. J. Syst. Sci. 2016, 47, 1084–1094. [Google Scholar] [CrossRef]
- Ji, H.; Hou, Z.; Zhang, R. Adaptive iterative learning control for high-speed trains with unknown speed delays and input saturations. IEEE Trans. Autom. Sci. Eng. 2016, 13, 260–273. [Google Scholar] [CrossRef]
- Hocine, B.; Abdesselem, B.; Hachemi, C. Adaptive iterative learning control of nonlinearly parameterised strict feedback systems with input saturation. Int. J. Autom. Control 2018, 12, 251–270. [Google Scholar]
- Jin, X. Nonrepetitive leader-follower formation tracking for multiagent systems with LOS range and angle constraints using iterative learning control. IEEE Trans. Cybern. 2019, 49, 1748–1758. [Google Scholar] [CrossRef]
- Chu, B.; Rauh, A.; Aschemann, H.; Rogers, E.; Owens, D.H. Constrained iterative learning control for linear time-varying systems with experimental validation on a high-speed rack feeder. IEEE Trans. Control Syst. Technol. 2021, 30, 1834–1846. [Google Scholar] [CrossRef]
- Nussbaum, R.D. Some remarks on a conjecture in parameter adaptive control. Syst. Control Lett. 1983, 3, 243–246. [Google Scholar] [CrossRef]
- Chen, H.; Jiang, P. Adaptive iterative learning control for nonlinear systems with unknown control gain. J. Dyn. Syst. Meas. Control 2004, 126, 916–920. [Google Scholar] [CrossRef]
- Jiang, P.; Chen, H.; Bamforth, L.C. A universal iterative learning stabilizer for a class of MIMO systems. Automatica 2006, 42, 973–981. [Google Scholar] [CrossRef]
- Xu, J.; Yan, R. Iterative learning control design without a priori knowledge of the control direction. Automatica 2004, 40, 1803–1809. [Google Scholar] [CrossRef]
- Yu, M.; Ye, X.; Qi, D. Repetitive learning control for triangular systems with unknown control directions. IET Control Theory Appl. 2011, 5, 2045–2051. [Google Scholar] [CrossRef]
- Zhang, C.; Li, J. Adaptive iterative learning control of non-uniform trajectory tracking for strict feedback nonlinear time-varying systems with unknown control direction. Appl. Math. Model. 2015, 39, 2942–2950. [Google Scholar] [CrossRef]
- Mudgett, D.R.; Morse, A.S. Adaptive stabilization of a discrete linear system with an unknown highfrequency gain. IEEE Trans. Autom. Control 1985, 30, 798–799. [Google Scholar] [CrossRef]
- Yu, M.; Wang, J.; Qi, D. Discrete-time adaptive iterative learning control for high-order nonlinear systems with unknown control directions. Int. J. Control 2013, 86, 299–308. [Google Scholar] [CrossRef]
- Xu, Q.-Y.; Li, X.-D. HONN-based adaptive ILC for pure-feedback non-affine discrete-time systems with unknown control directions. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 212–224. [Google Scholar] [CrossRef]
- Xu, Q.-Y.; Li, X.-D. Adaptive fuzzy ILC of nonlinear discrete-time systems with unknown dead zones and control directions. Int. J. Syst. Sci. 2018, 49, 1878–1894. [Google Scholar] [CrossRef]
- Wang, L.X. Adaptive Fuzzy Systems and Control; Prentice-Hall: Englewood Cliffs, NJ, USA, 1994. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Q.-Y.; He, W.-Y.; Zheng, C.-T.; Xu, P.; Wei, Y.-S.; Wan, K. Adaptive Fuzzy Iterative Learning Control for Systems with Saturated Inputs and Unknown Control Directions. Mathematics 2022, 10, 3462. https://doi.org/10.3390/math10193462
Xu Q-Y, He W-Y, Zheng C-T, Xu P, Wei Y-S, Wan K. Adaptive Fuzzy Iterative Learning Control for Systems with Saturated Inputs and Unknown Control Directions. Mathematics. 2022; 10(19):3462. https://doi.org/10.3390/math10193462
Chicago/Turabian StyleXu, Qing-Yuan, Wan-Ying He, Chuang-Tao Zheng, Peng Xu, Yun-Shan Wei, and Kai Wan. 2022. "Adaptive Fuzzy Iterative Learning Control for Systems with Saturated Inputs and Unknown Control Directions" Mathematics 10, no. 19: 3462. https://doi.org/10.3390/math10193462
APA StyleXu, Q.-Y., He, W.-Y., Zheng, C.-T., Xu, P., Wei, Y.-S., & Wan, K. (2022). Adaptive Fuzzy Iterative Learning Control for Systems with Saturated Inputs and Unknown Control Directions. Mathematics, 10(19), 3462. https://doi.org/10.3390/math10193462