
Control of Multistability in an Erbium-Doped Fiber Laser by an Artificial Neural Network: A Numerical Approach

 , ,
, ,  ,
,  ,
, 

Abstract
:1. Introduction
2. Laser Model
Complete Model
3. Normalized Equations
4. Control Techniques
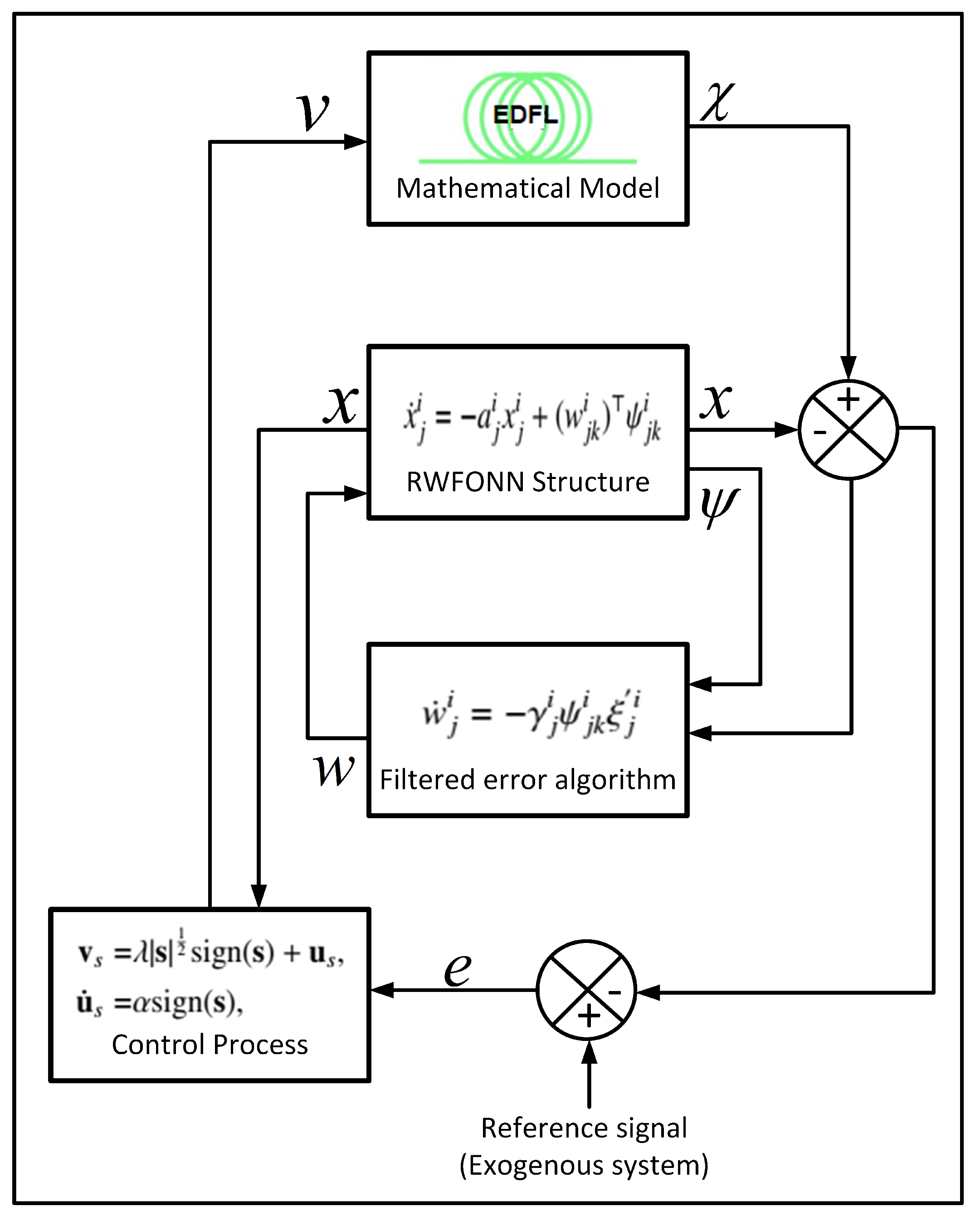
4.1. Recurrent Wavelet First-Order Neural Network
4.2. Filtered Error Algorithm
- 1.
- , ∈ ( and are uniformly bounded);
- 2.
4.3. Block Control Linearization Technique
4.4. Super-Twisting Control Algorithm
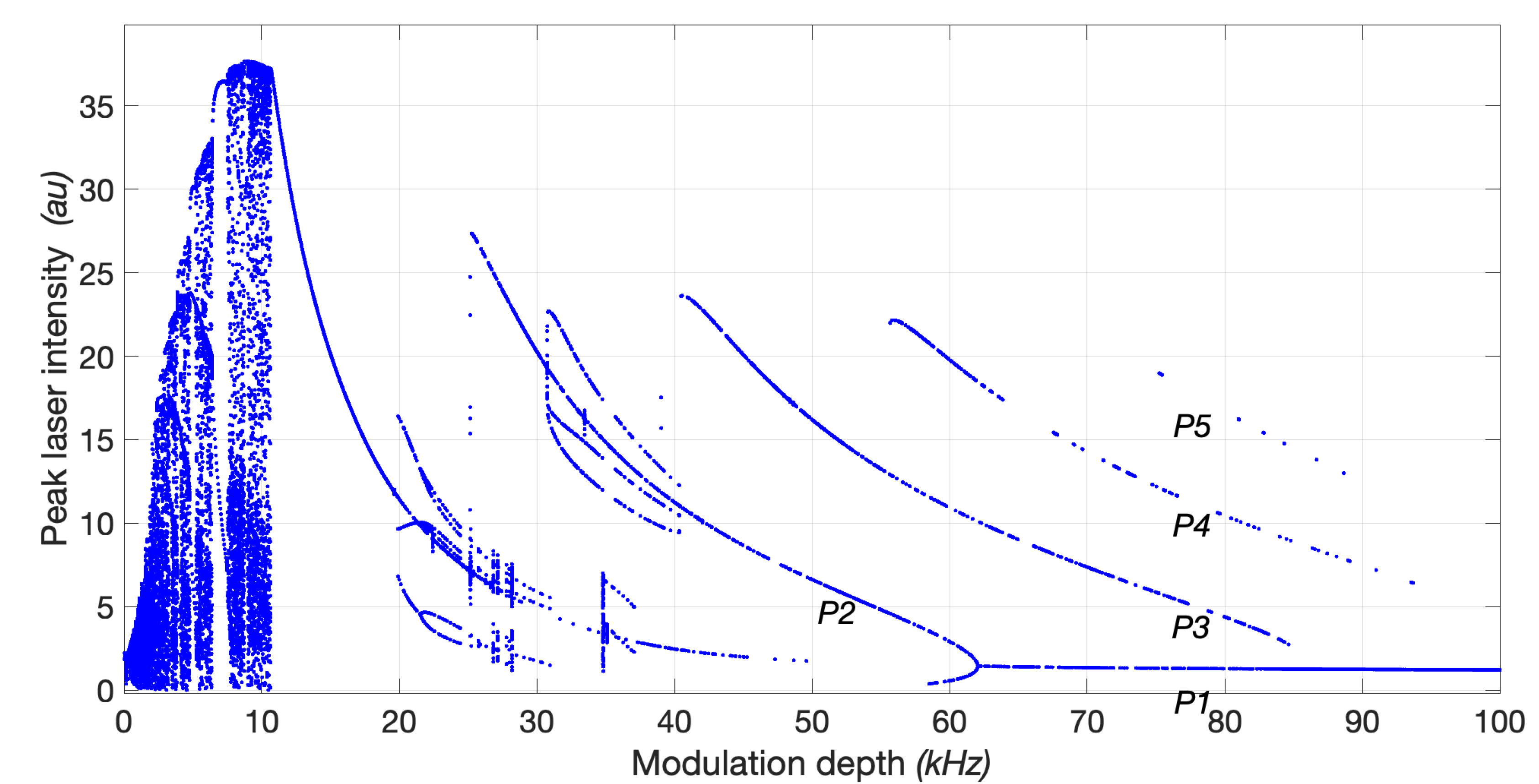
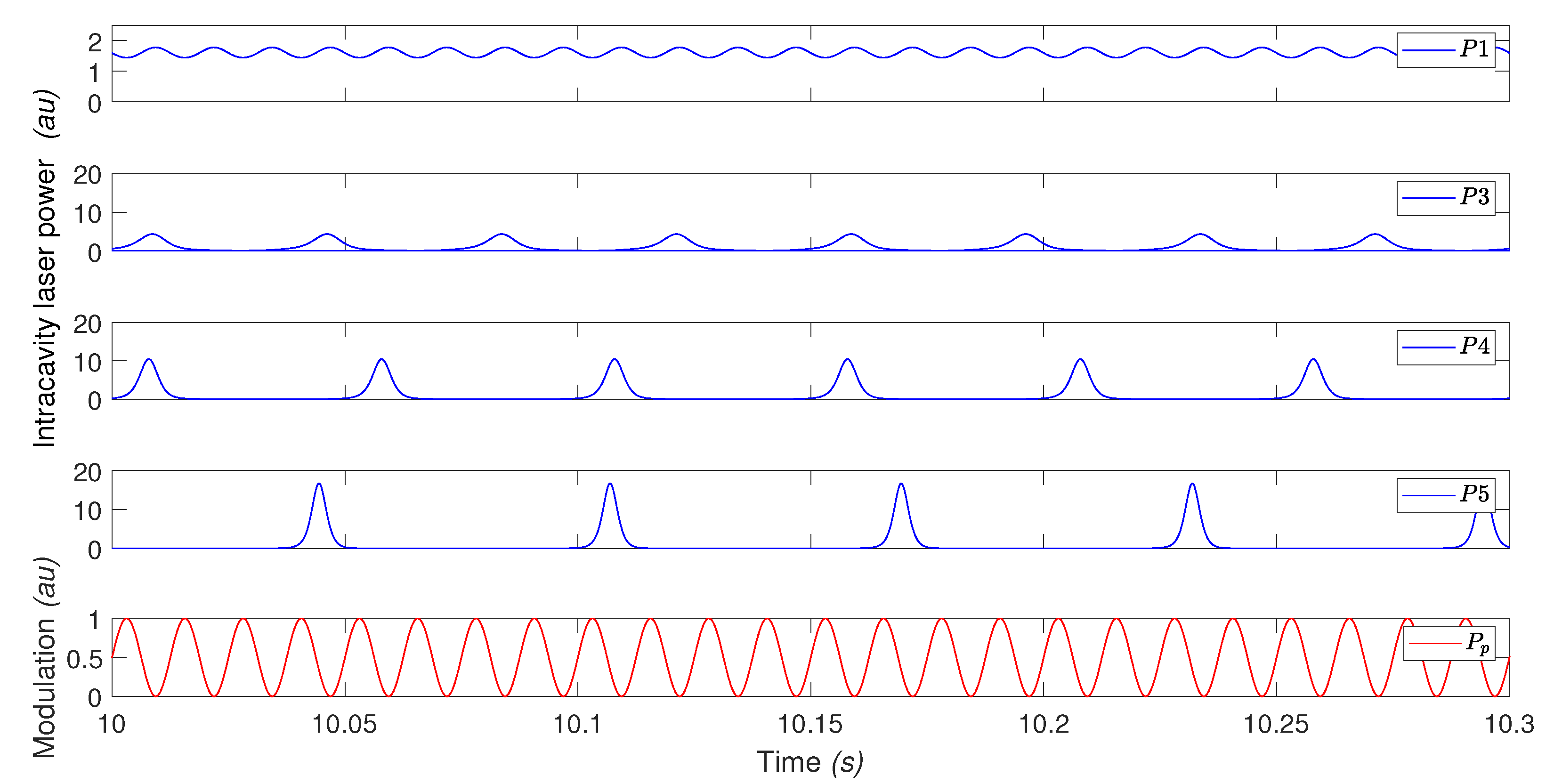
5. Results of Numerical Simulations
Bifurcation Diagram and Time Series
6. Controller Application to RWFONN
7. Neural Identification and Controller
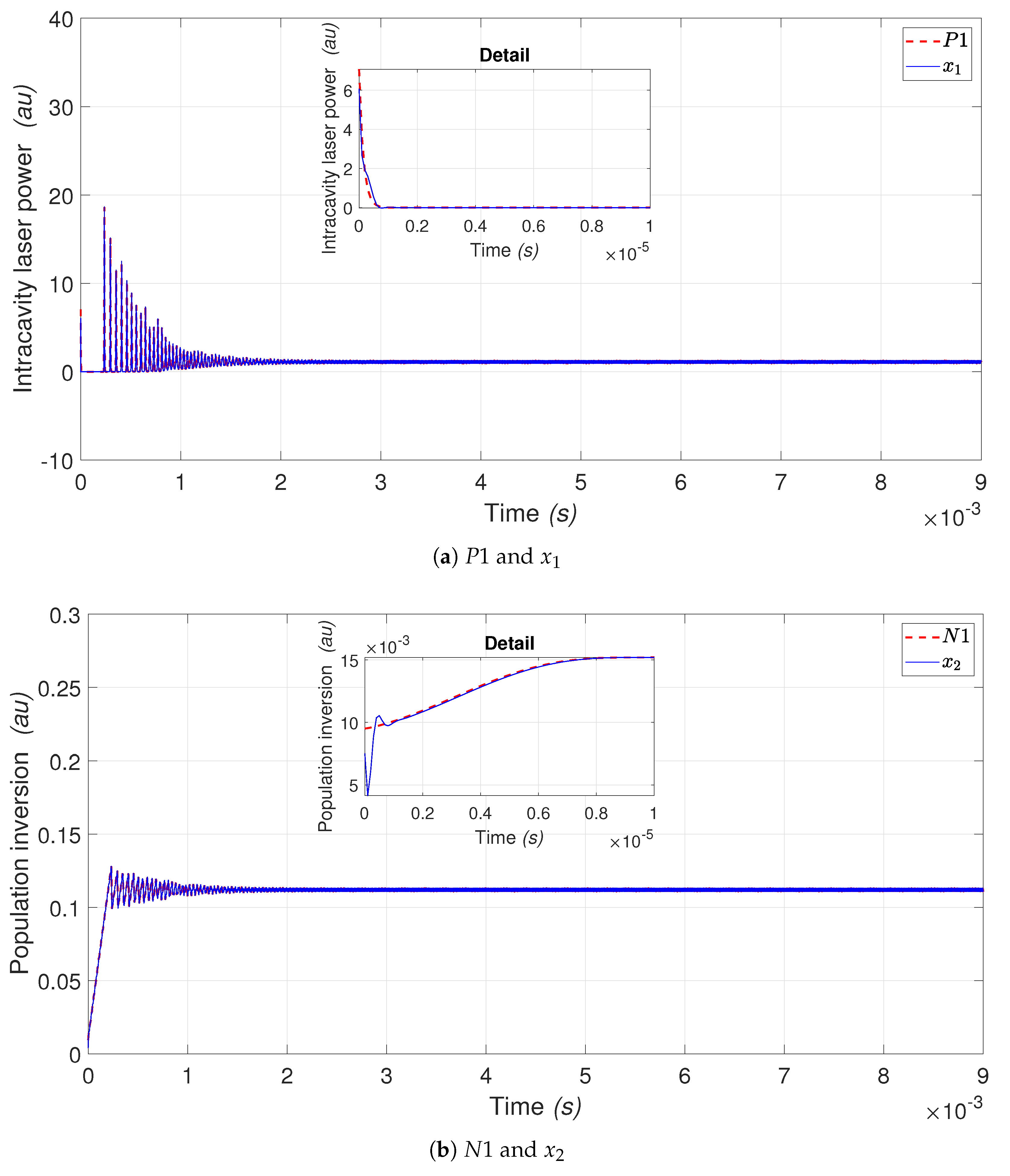
7.1. Neural Identification of P1
7.2. Neural Identification of Multistate Intermittency
7.3. EDFL Controller
8. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Identification Error Boundedness
Appendix B. Closed-Loop Stability Analysis
References
- Digonnet, M.J. Rare-Earth-Doped Fiber Lasers and Amplifiers, Revised and Expanded; CRC Press: Boca Raton, FL, USA, 2001. [Google Scholar]
- Luo, L.G.; Chu, P.L. Optical secure communications with chaotic erbium-doped fiber lasers. J. Opt. Soc. Am. B 1998, 15, 2524–2530. [Google Scholar] [CrossRef]
- Shay, T.M.; Duarte, F.J. Tunable fiber lasers. In Tunable Laser Applications; Duarte, F.J., Ed.; CRC Press: Boca Raton, FL, USA, 2009. [Google Scholar]
- Pisarchik, A.N.; Jaimes-Reátegui, R.; Sevilla-Escoboza, R.; García-Lopez, J.H.; Kazantsev, V.B. Optical fiber synaptic sensor. Opt. Lasers Eng. 2011, 49, 736–742. [Google Scholar] [CrossRef]
- Mary, R.; Choudhury, D.; Kar, A.K. Applications of fiber lasers for the development of compact photonic devices. IEEE J. Select. Top. Quantum Electron. 2014, 20, 72–84. [Google Scholar] [CrossRef]
- Zhao, L.; Li, D.; Li, L.; Wang, X.; Geng, Y.; Shen, D.; Su, L. Route to larger pulse energy in ultrafast fiber lasers. IEEE J. Select. Top. Quantum Electron. 2017, 24, 1–9. [Google Scholar] [CrossRef]
- Zervas, M.N.; Codemard, C.A. High power fiber lasers: A review. IEEE J. Select. Top. Quantum Electron. 2014, 20, 219–241. [Google Scholar] [CrossRef]
- Castillo-Guzmán, A.; Anzueto-Sánchez, G.; Selvas-Aguilar, R.; Estudillo-Ayala, J.; Rojas-Laguna, R.; May-Arrioja, D.; Martínez-Ríos, A. Erbium-Doped Tunable Fiber Laser. In Proceedings of the Laser Beam Shaping IX. International Society for Optics and Photonics, San Diego, CA, USA, 11–12 August 2008; Volume 7062, p. 70620Y. [Google Scholar]
- Saucedo-Solorio, J.M.; Pisarchik, A.N.; Kir’yanov, A.V.; Aboites, V. Generalized multistability in a fiber laser with modulated losses. J. Opt. Soc. Am. B 2003, 20, 490–496. [Google Scholar] [CrossRef]
- Reategui, R.J.; Kir’yanov, A.V.; Pisarchik, A.N.; Barmenkov, Y.O.; Il’ichev, N.N. Experimental study and modeling of coexisting attractors and bifurcations in an erbium-doped fiber laser with diode-pump modulation. Laser Phys. 2004, 14, 1277–1281. [Google Scholar]
- Pisarchik, A.; Jaimes-Reátegui, R.; Sevilla-Escoboza, R.; Huerta-Cuellar, G. Multistate intermittency and extreme pulses in a fiber laser. Phys. Rev. E 2012, 86, 056219. [Google Scholar] [CrossRef]
- Ke, J.; Yi, L.; Xia, G.; Hu, W. Chaotic optical communications over 100-km fiber transmission at 30-Gb/s bit rate. Opt. Lett. 2018, 43, 1323–1326. [Google Scholar] [CrossRef]
- Keren, S.; Horowitz, M. Interrogation of fiber gratings by use of low-coherence spectral interferometry of noiselike pulses. Opt. Lett. 2001, 26, 328–330. [Google Scholar] [CrossRef] [PubMed]
- Lim, H.; Jiang, Y.; Wang, Y.; Huang, Y.C.; Chen, Z.; Wise, F.W. Ultrahigh-resolution optical coherence tomography with a fiber laser source at 1 μm. Opt. Lett. 2005, 30, 1171–1173. [Google Scholar] [CrossRef] [PubMed]
- Wu, Q.; Okabe, Y.; Sun, J. Investigation of dynamic properties of erbium fiber laser for ultrasonic sensing. Opt. Express 2014, 22, 8405–8419. [Google Scholar] [CrossRef] [PubMed]
- Droste, S.; Ycas, G.; Washburn, B.R.; Coddington, I.; Newbury, N.R. Optical frequency comb generation based on erbium fiber lasers. Nanophotonics 2016, 5, 196–213. [Google Scholar] [CrossRef]
- Kraus, M.; Ahmed, M.A.; Michalowski, A.; Voss, A.; Weber, R.; Graf, T. Microdrilling in steel using ultrashort pulsed laser beams with radial and azimuthal polarization. Opt. Express 2010, 18, 22305–22313. [Google Scholar] [CrossRef] [PubMed]
- Philippov, V.; Codemard, C.; Jeong, Y.; Alegria, C.; Sahu, J.K.; Nilsson, J.; Pearson, G.N. High-energy in-fiber pulse amplification for coherent lidar applications. Opt. Lett. 2004, 29, 2590–2592. [Google Scholar] [CrossRef] [PubMed]
- Morin, F.; Druon, F.; Hanna, M.; Georges, P. Microjoule femtosecond fiber laser at 1.6 μm for corneal surgery applications. Opt. Lett. 2009, 34, 1991–1993. [Google Scholar] [CrossRef] [PubMed]
- Sanchez, F.; Le Boudec, P.; François, P.L.; Stephan, G. Effects of ion pairs on the dynamics of erbium-doped fiber lasers. Phys. Rev. A 1993, 48, 2220. [Google Scholar] [CrossRef] [PubMed]
- Colin, S.; Contesse, E.; Le Boudec, P.; Stephan, G.; Sanchez, F. Evidence of a saturable-absorption effect in heavily erbium-doped fibers. Opt. Lett. 1996, 21, 1987–1989. [Google Scholar] [CrossRef] [PubMed]
- Rangel-Rojo, R.; Mohebi, M. Study of the onset of self-pulsing behaviour in an Er-doped fibre laser. Opt. Commun. 1997, 137, 98–102. [Google Scholar] [CrossRef]
- Huerta-Cuellar, G.; Pisarchik, A.N.; Barmenkov, Y.O. Experimental characterization of hopping dynamics in a multistable fiber laser. Phys. Rev. E 2008, 78, 035202. [Google Scholar] [CrossRef]
- Pisarchik, A.N.; Hramov, A.E. Multistability in Physical and Living Systems: Characterization and Applications; Springer: Berlin/Heidelberg, Germany, 2022. [Google Scholar]
- Chen, B.; Cheng, X.; Bao, H.; Chen, M.; Xu, Q. Extreme Multistability and Its Incremental Integral Reconstruction in a Non-Autonomous Memcapacitive Oscillator. Mathematics 2022, 10, 754. [Google Scholar] [CrossRef]
- Pisarchik, A.N.; Feudel, U. Control of multistability. Phys. Rep. 2014, 540, 167–218. [Google Scholar] [CrossRef]
- Pisarchik, A.N.; Jaimes-Reátegui, R.; Rodríguez-Flores, C.; García-López, J.H.; Huerta-Cuellar, G.; Martín-Pasquín, F.J. Secure chaotic communication based on extreme multistability. J. Franklin Inst. 2021, 358, 2561–2575. [Google Scholar] [CrossRef]
- Bao, H.; Ding, R.; Hua, M.; Wu, H.; Chen, B. Initial-condition effects on a two-memristor-based Jerk system. Mathematics 2022, 10, 411. [Google Scholar] [CrossRef]
- Bao, H.; Hua, Z.; Li, H.; Chen, M.; Bao, B. Memristor-based hyperchaotic maps and application in auxiliary classifier generative adversarial nets. IEEE Trans. Ind. Inform. 2021, 18, 5297–5306. [Google Scholar] [CrossRef]
- Jaimes-Reátegui, R.; Esqueda de la Torre, J.O.; García-López, J.H.; Huerta-Cuellar, G.; Aboites, V.; Pisarchik, A.N. Generation of giant periodic pulses in the array of erbium-doped fiber lasers by controlling multistability. Opt. Commun. 2020, 477, 126355. [Google Scholar] [CrossRef]
- Magallón, D.A.; Castañeda, C.E.; Jurado, F.; Morfin, O.A. Design of a neural super-twisting controller to emulate a flywheel energy storage system. Energies 2021, 14, 6416. [Google Scholar] [CrossRef]
- Pisarchik, A.N.; Jaimes-Reátegui, R.; Sevilla-Escoboza, R.; Huerta-Cuellar, G.; Taki, M. Rogue waves in a multistable system. Phys. Rev. Lett. 2011, 107, 274101. [Google Scholar] [CrossRef] [PubMed]
- Pisarchik, A.N.; Kir’yanov, A.V.; Barmenkov, Y.O.; Jaimes-Reátegui, R. Dynamics of an erbium-doped fiber laser with pump modulation: Theory and experiment. J. Opt. Soc. Am. B 2005, 22, 2107–2114. [Google Scholar] [CrossRef]
- Jurado, F.; Lopez, S. A wavelet neural control scheme for a quadrotor unmanned aerial vehicle. Philos. Trans. R. Soc. A 2018, 376, 20170248. [Google Scholar] [CrossRef]
- Vázquez, L.A.; Jurado, F. Continuous-time decentralized wavelet neural control for a 2 DOF robot manipulator. In Proceedings of the 2014 11th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Ciudad del Carmen, Mexico, 29 September–3 October 2014; pp. 1–6. [Google Scholar]
- Kosmatopoulos, E.B.; Polycarpou, M.M.; Christodoulou, M.A.; Ioannou, P.A. High-order neural network structures for identification of dynamical systems. IEEE Trans. Neural Netw. 1995, 6, 422–431. [Google Scholar] [CrossRef] [PubMed]
- Vázquez, L.A.; Jurado, F.; Alanís, A.Y. Decentralized identification and control in real-time of a robot manipulator via recurrent wavelet first-order neural network. Math. Probl. Eng. 2015, 2015, 451049. [Google Scholar] [CrossRef]
- Loukianov, A.G. Robust block decomposition sliding mode control design. Math. Probl. Eng. 2003, 8, 349–365. [Google Scholar] [CrossRef]
- Utkin, V.; Guldner, J.; Shi, J. Sliding Mode Control in Electro-Mechanical Systems; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Chalanga, A.; Kamal, S.; Fridman, L.M.; Bandyopadhyay, B.; Moreno, J.A. Implementation of super-twisting control: Super-twisting and higher order sliding-mode observer-based approaches. IEEE Trans. Ind. Electron. 2016, 63, 3677–3685. [Google Scholar] [CrossRef]
- Pisarchik, A.N.; Barmenkov, Y.O.; Kir’yanov, A.V. Experimental characterization of the bifurcation structure in an erbium-doped fiber laser with pump modulation. IEEE J. Quantum Electron. 2003, 39, 1567–1571. [Google Scholar] [CrossRef]
- Moreno, J.A.; Osorio, M. Strict Lyapunov functions for the super-twisting algorithm. IEEE Trans. Autom. Control 2012, 57, 1035–1040. [Google Scholar] [CrossRef]
- Hale, J.K. Ordinary Differential Equations; Wiley-InterScience: Maitland, FL, USA, 1969. [Google Scholar]
- Rovithakis, G.A.; Christodoulou, M.A. Adaptive Control with Recurrent High-Order Neural Networks: Theory and Industrial Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
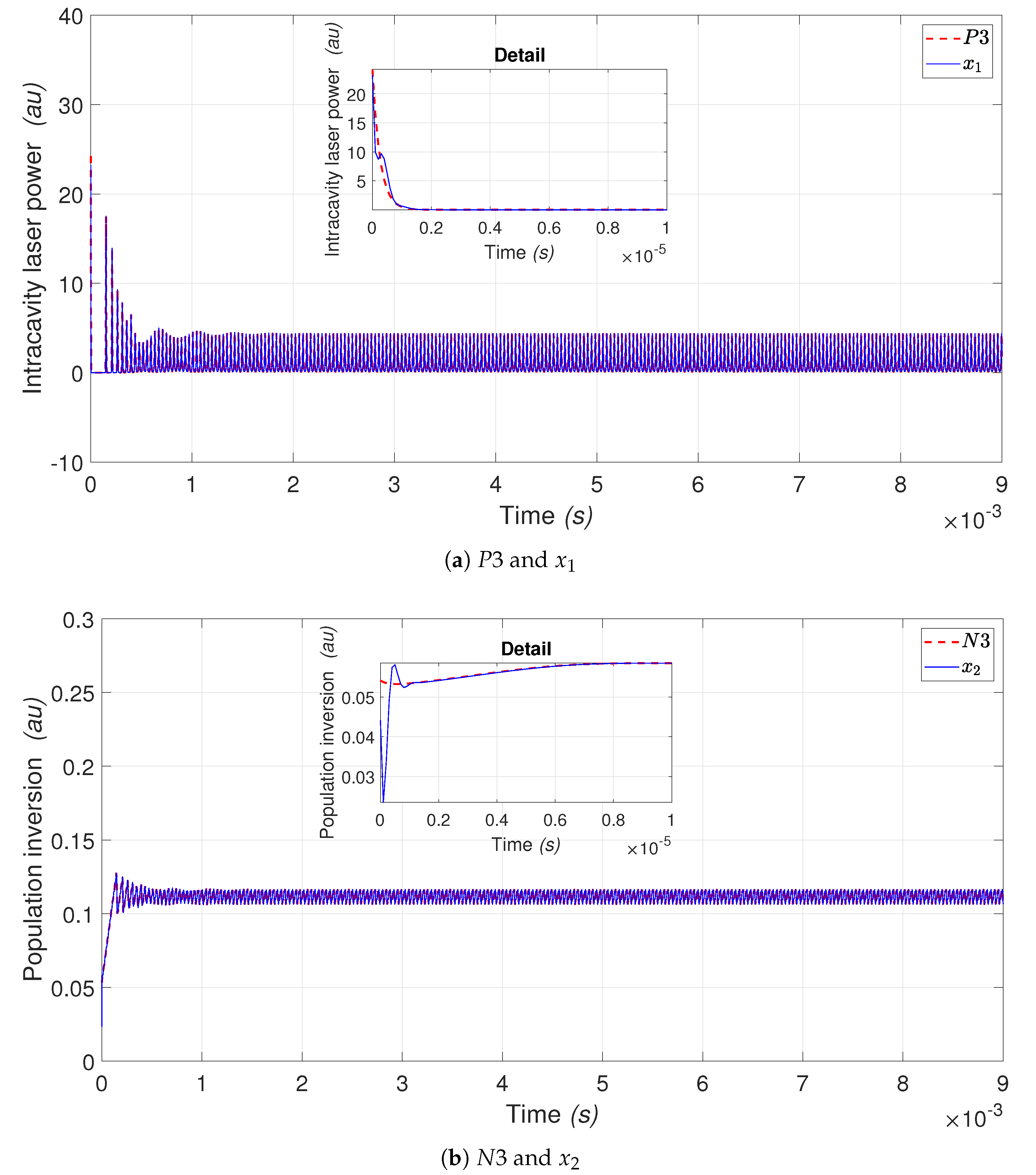
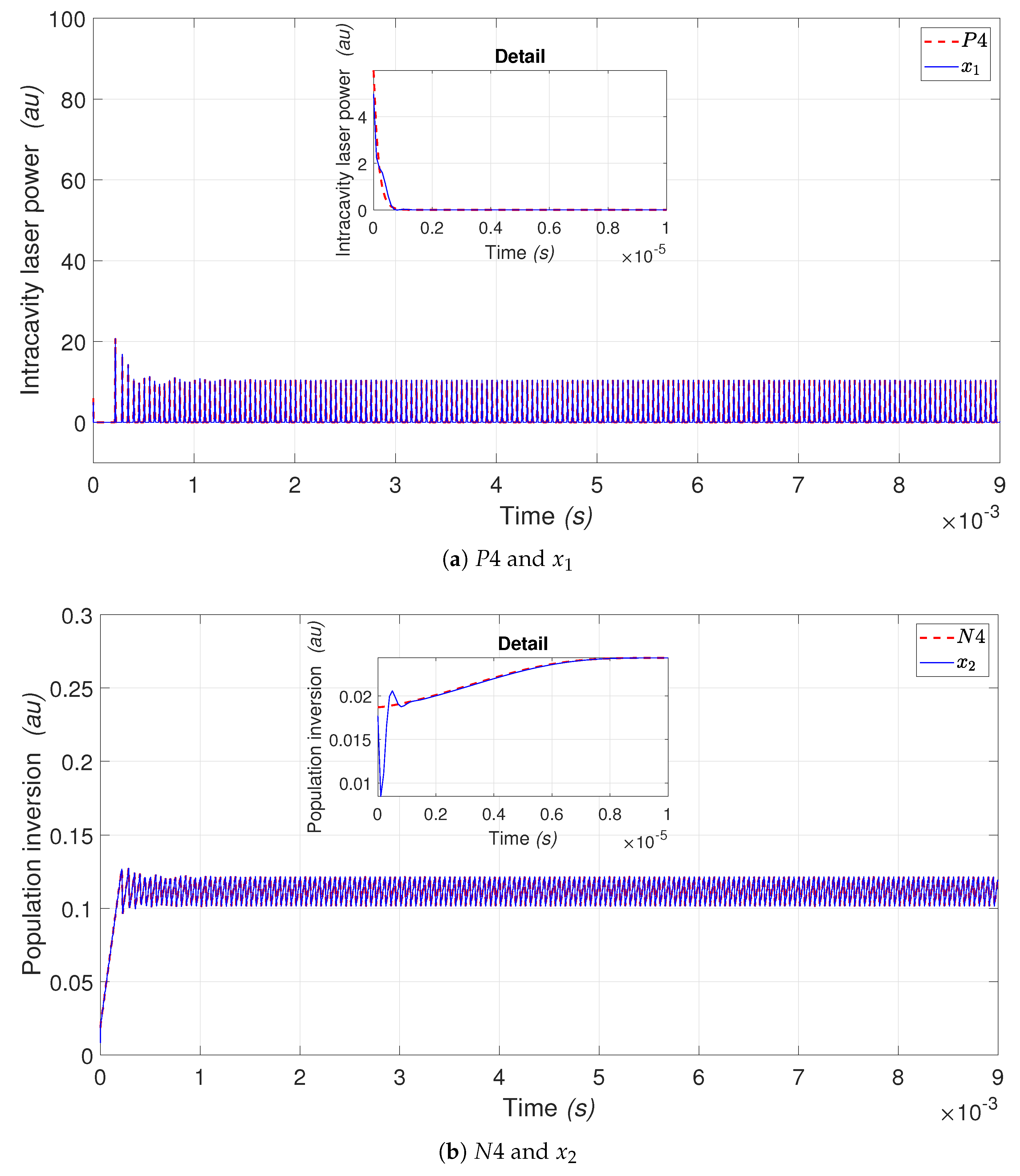
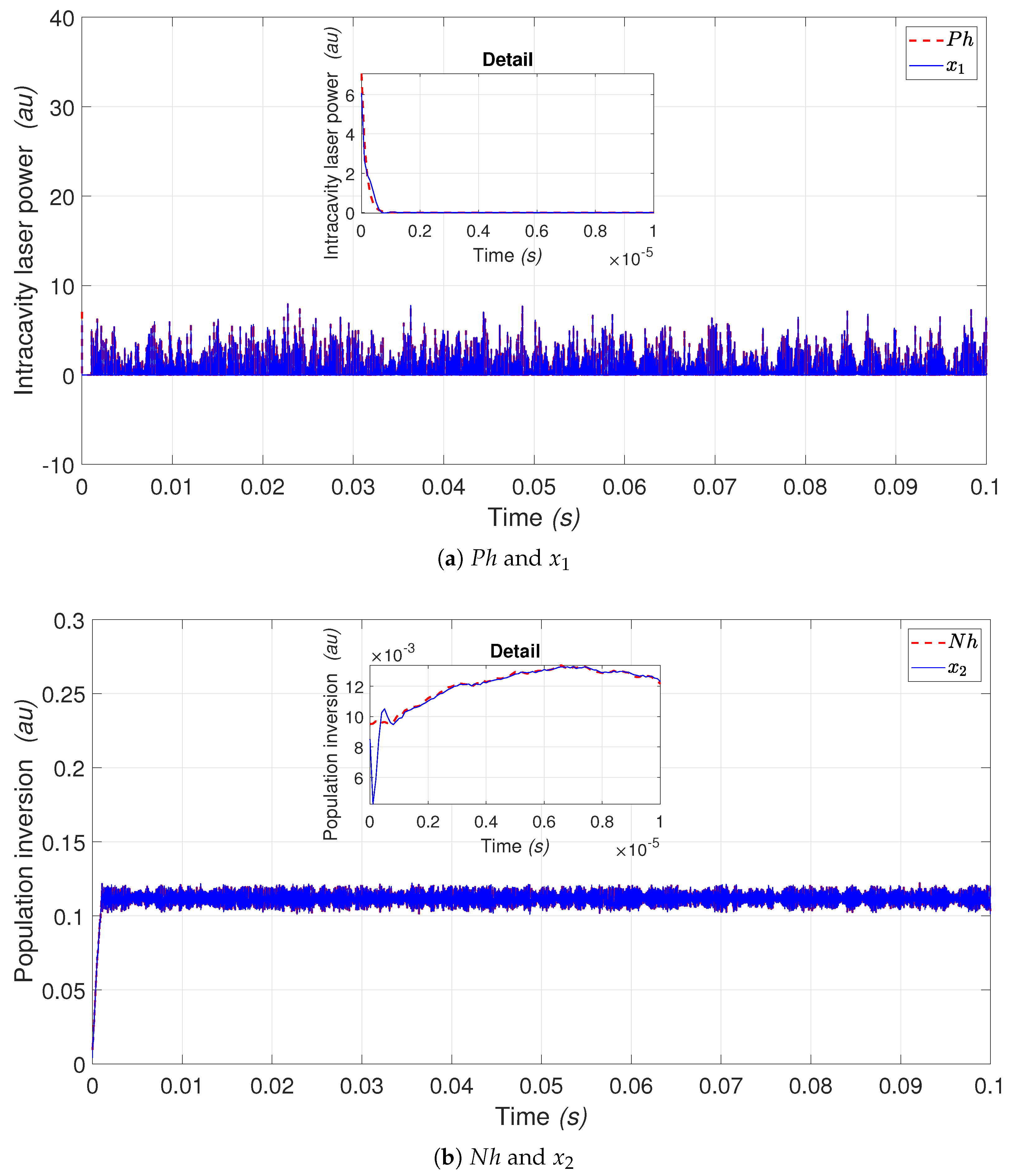
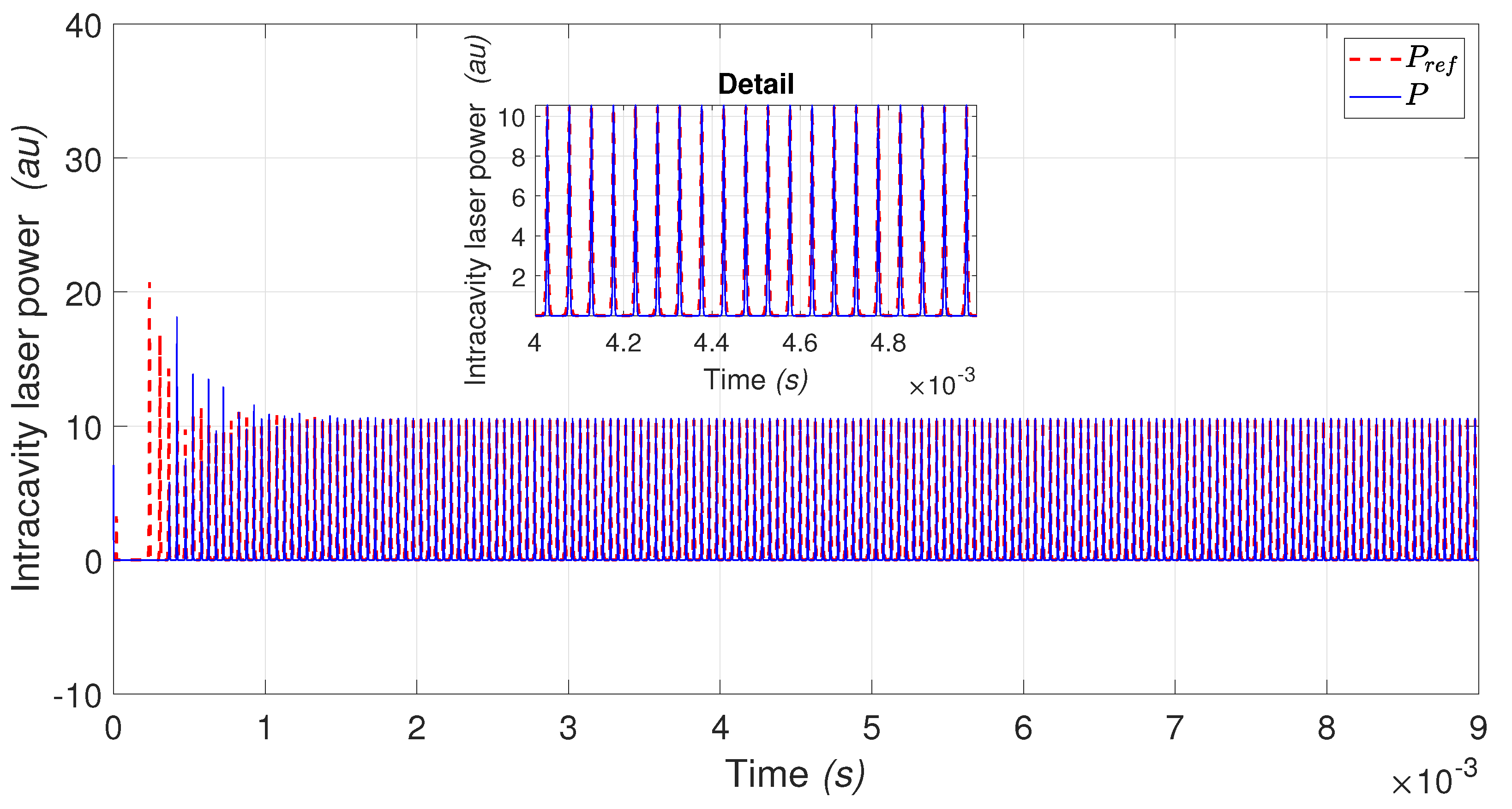
| Figure | Period (States) | Line | Initial Condition | Convergence |
|---|---|---|---|---|
| Figure 4a | and | Red dashed and blue continuous | and | 0.00002 s |
| Figure 4b | and | Red dashed and blue continuous | and | 0.00001 s |
| Figure 5a | and | Red dashed and blue continuous | and | 0.00002 s |
| Figure 5b | and | Red dashed and blue continuous | and | 0.00001 s |
| Figure 6a | and | Red dashed and blue continuous | and | 0.00001 s |
| Figure 6b | and | Red dashed and blue continuous | and | 0.00001 s |
| Figure 7a | and | Red dashed and blue continuous | and | 0.00001 s |
| Figure 7b | and | Red dashed and blue continuous | and | 0.00002 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Magallón, D.A.; Jaimes-Reátegui, R.; García-López, J.H.; Huerta-Cuellar, G.; López-Mancilla, D.; Pisarchik, A.N. Control of Multistability in an Erbium-Doped Fiber Laser by an Artificial Neural Network: A Numerical Approach. Mathematics 2022, 10, 3140. https://doi.org/10.3390/math10173140
Magallón DA, Jaimes-Reátegui R, García-López JH, Huerta-Cuellar G, López-Mancilla D, Pisarchik AN. Control of Multistability in an Erbium-Doped Fiber Laser by an Artificial Neural Network: A Numerical Approach. Mathematics. 2022; 10(17):3140. https://doi.org/10.3390/math10173140
Chicago/Turabian StyleMagallón, Daniel A., Rider Jaimes-Reátegui, Juan H. García-López, Guillermo Huerta-Cuellar, Didier López-Mancilla, and Alexander N. Pisarchik. 2022. "Control of Multistability in an Erbium-Doped Fiber Laser by an Artificial Neural Network: A Numerical Approach" Mathematics 10, no. 17: 3140. https://doi.org/10.3390/math10173140
APA StyleMagallón, D. A., Jaimes-Reátegui, R., García-López, J. H., Huerta-Cuellar, G., López-Mancilla, D., & Pisarchik, A. N. (2022). Control of Multistability in an Erbium-Doped Fiber Laser by an Artificial Neural Network: A Numerical Approach. Mathematics, 10(17), 3140. https://doi.org/10.3390/math10173140