
Improving the Road and Traffic Control Prediction Based on Fuzzy Logic Approach in Multiple Intersections




Abstract
:1. Introduction
- We evaluate different definitions of state spaces for traffic signal control problems with the fuzzy logic control method.
- We consider and further integrate essential contextual factors that may affect route selection by employing a multi-agent system for road traffic decision-making.
- The aim is to reduce queue length and congestion at intersections and throughout the road network by improving intersection quality.
2. Related Work
2.1. Urban Traffic Based on Multi Agent
2.2. Urban Traffic Optimization by Using Fuzzy Logic Model
2.3. Urban Traffic with Considering Different Method
2.4. Traffic Light Control
3. Methodology
3.1. Multi-Agent Signal Control
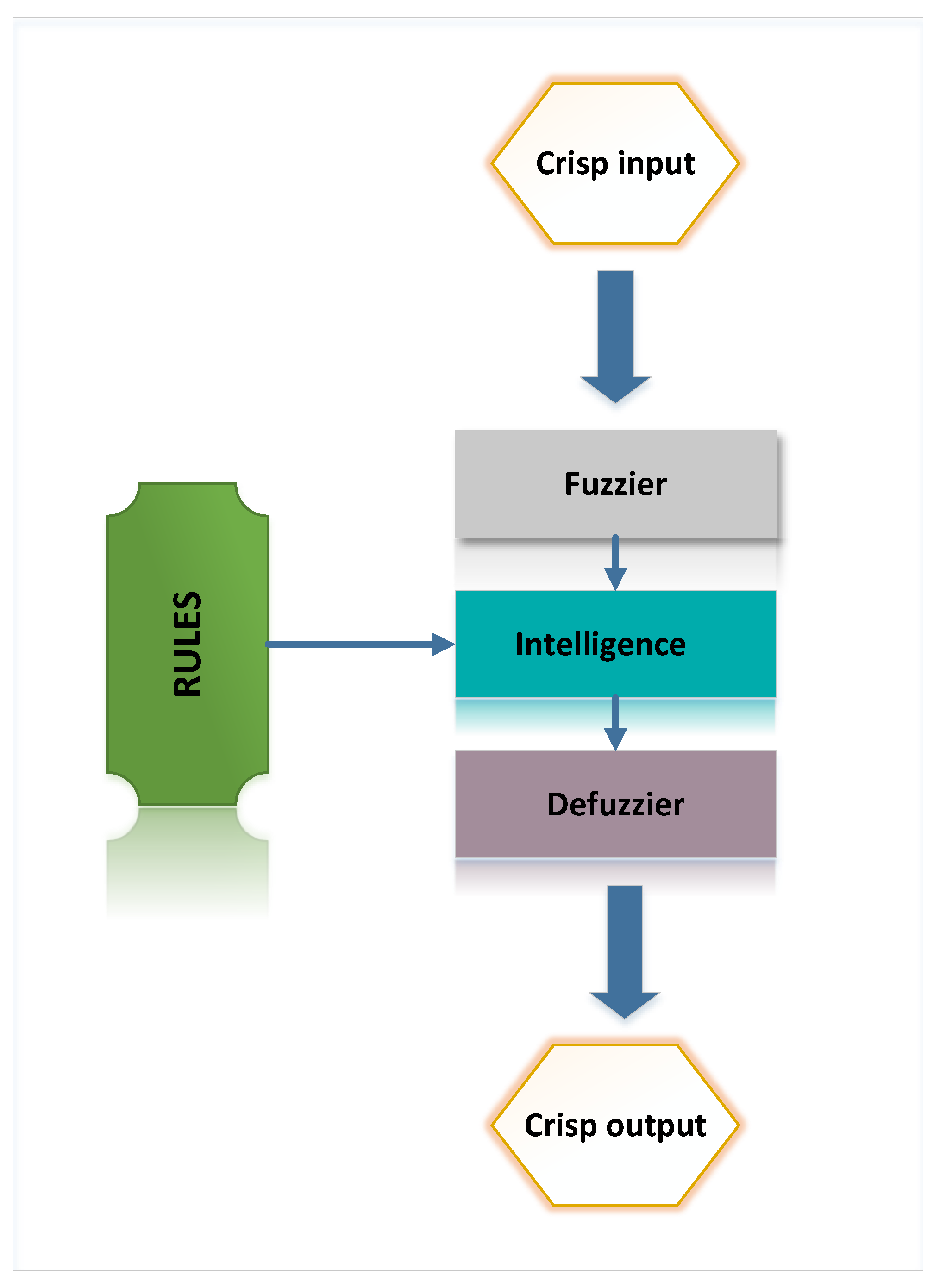
3.2. Fuzzy Logic Control Method
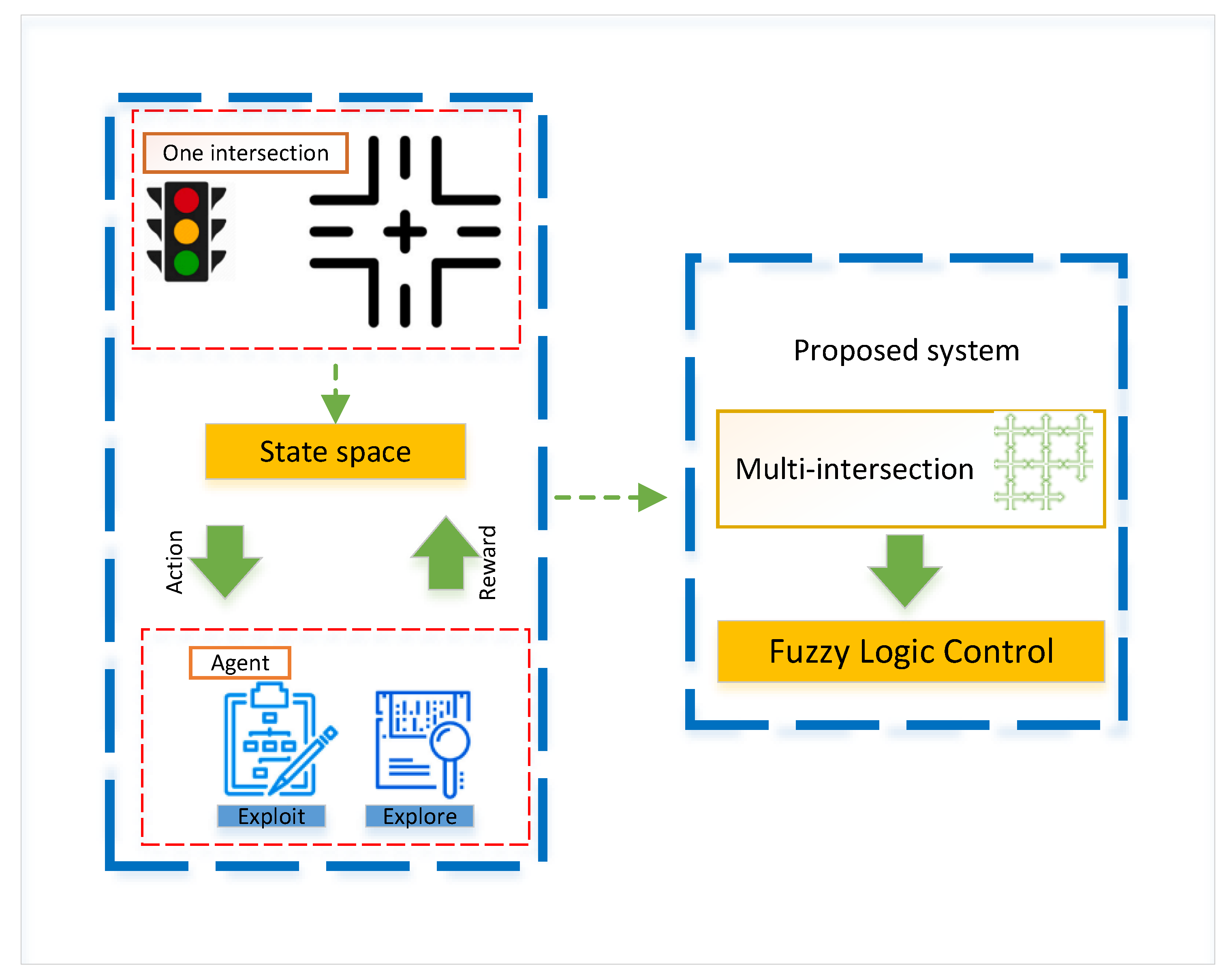
3.3. The Proposed Framework
3.4. Mathematical Model of an Intersection
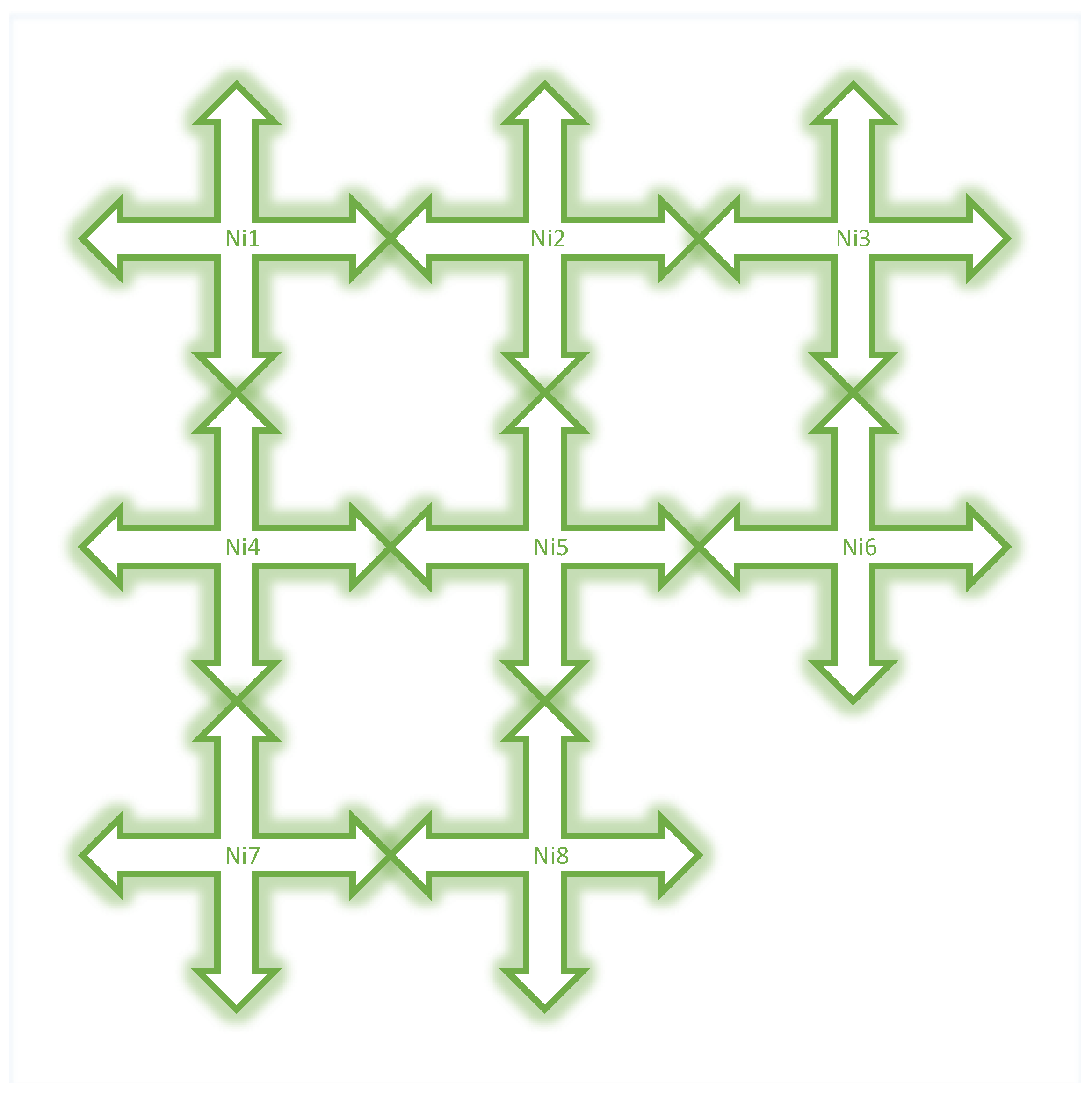
3.5. An Analysis of Multi-Agent Intersections
3.6. Multi-Intersection Network Modeling by Fuzzy Controller
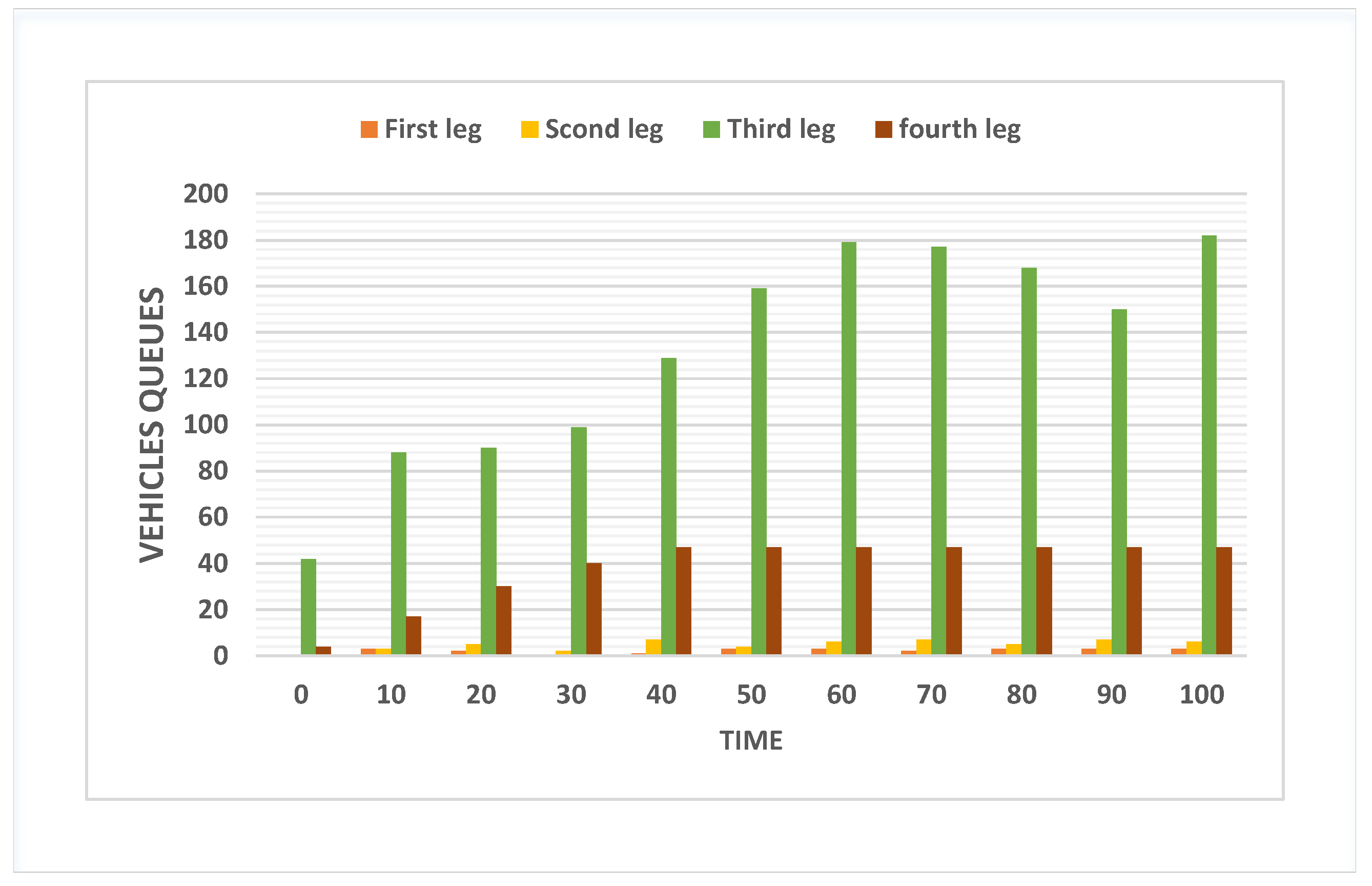
4. Results
4.1. Fixed Time Controller
4.2. Stable Fuzzy Logic Design on Multi Intersection
4.3. Discussion
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Usman, M.; Tareen, W.U.K.; Amin, A.; Ali, H.; Bari, I.; Sajid, M.; Seyedmahmoudian, M.; Stojcevski, A.; Mahmood, A.; Mekhilef, S. A Coordinated Charging Scheduling of Electric Vehicles Considering Optimal Charging Time for Network Power Loss Minimization. Energies 2021, 14, 5336. [Google Scholar] [CrossRef]
- Mannion, P.; Duggan, J.; Howley, E. Parallel reinforcement learning for traffic signal control. Procedia Comput. Sci. 2015, 52, 956–961. [Google Scholar] [CrossRef] [Green Version]
- Garg, H.; Kaushal, E.G. Traffic lights control system for Indian cities using WSN and Fuzzy control. Traffic 2017, 4, 56–65. [Google Scholar]
- Luk, J.; Sims, A.; Lowrie, P. SCATS-application and field comparison with a transyt optimised fixed time system. In Proceedings of the International Conference on Road Traffic Signalling, London, UK, 30 March–1 April 1982; pp. 71–74. [Google Scholar]
- Jia, D.; Chen, Z. Traffic signal control optimization based on fuzzy neural network. In Proceedings of the 2012 International Conference on Measurement, Information and Control, Harbin, China, 18–20 May 2012; Volume 2, pp. 1015–1018. [Google Scholar]
- Wang, Y.-F.; Guan, Z. Research on polling based traffic signal control strategy with fuzzy control. In Proceedings of the 2018 IEEE 4th International Conference on Computer and Communications (ICCC), Chengdu, China, 7–10 December 2018; pp. 500–504. [Google Scholar]
- Chen, S.; Sun, J.; Yao, J. Development and simulation application of a dynamic speed dynamic signal strategy for arterial traffic management. In Proceedings of the 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), Washington, DC, USA, 5–7 October 2011; pp. 1349–1354. [Google Scholar]
- Zhang, L.; Li, H.; Prevedouros, P.D. Signal control for oversaturated intersections using fuzzy logic. In Proceedings of the Transportation and Development Innovative Best Practices 2008, Beijing, China, 24–26 April 2008; pp. 179–184. [Google Scholar]
- Vijaya Kumar, S.; Karunanithi, K.; Raja, S.; Ramesh, S.; Chandrasekar, P.; Obulupathy, R. Modelling of electric vehicle charging station and controlled by fuzzy logic controller with different modes of operation. J. Control. Decis. 2022, 1–14. [Google Scholar] [CrossRef]
- Ouallane, A.A.; Bahnasse, A.; Bakali, A.; Talea, M. Overview of Road Traffic Management Solutions based on IoT and AI. Procedia Comput. Sci. 2022, 198, 518–523. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Liang, H.; Liu, Y. A review of the self-adaptive traffic signal control system based on future traffic environment. J. Adv. Transp. 2018, 2018, 1096123. [Google Scholar] [CrossRef]
- Dorri, A.; Kanhere, S.S.; Jurdak, R. Multi-agent systems: A survey. IEEE Access 2018, 6, 28573–28593. [Google Scholar] [CrossRef]
- García, J.; Torralba, Á.; Florez, J.E.; Borrajo, D.; López, C.L.; García-Olaya, Á. TIMIPLAN: A Tool for Transportation Tasks. In Autonomic Road Transport Support Systems; Springer: Cham, Switzerland, 2016; pp. 269–285. [Google Scholar]
- El-Tantawy, S.; Abdulhai, B.; Abdelgawad, H. Multiagent reinforcement learning for integrated network of adaptive traffic signal controllers (MARLIN-ATSC): Methodology and large-scale application on downtown Toronto. IEEE Trans. Intell. Transp. Syst. 2013, 14, 1140–1150. [Google Scholar] [CrossRef]
- Jafari, S.; Shahbazi, Z.; Byun, Y.C. Designing the Controller-Based Urban Traffic Evaluation and Prediction Using Model Predictive Approach. Appl. Sci. 2022, 12, 1992. [Google Scholar] [CrossRef]
- Khooban, M.H.; Vafamand, N.; Liaghat, A.; Dragicevic, T. An optimal general type-2 fuzzy controller for Urban Traffic Network. ISA Trans. 2017, 66, 335–343. [Google Scholar] [CrossRef]
- Li, L.; Wen, D.; Yao, D. A survey of traffic control with vehicular communications. IEEE Trans. Intell. Transp. Syst. 2013, 15, 425–432. [Google Scholar] [CrossRef]
- Roess, R.P.; Prassas, E.S.; McShane, W.R. Traffic Engineering; Pearson/Prentice Hall: Upper Saddle River, NJ, USA, 2004. [Google Scholar]
- Soon, K.L.; Lim, J.M.Y.; Parthiban, R. Coordinated traffic light control in cooperative green vehicle routing for pheromone-based multi-agent systems. Appl. Soft Comput. 2019, 81, 105486. [Google Scholar] [CrossRef]
- Hamidi, H.; Kamankesh, A. An approach to intelligent traffic management system using a multi-agent system. Int. J. Intell. Transp. Syst. Res. 2018, 16, 112–124. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, J.; Zha, H. Integrating independent and centralized multi-agent reinforcement learning for traffic signal network optimization. arXiv 2019, arXiv:1909.10651. [Google Scholar]
- Prasetiyo, E.E.; Wahyunggoro, O.; Sulistyo, S. Design and simulation of adaptive traffic light controller using fuzzy logic control sugeno method. Int. J. Sci. Res. Publ. 2015, 5, 1–6. [Google Scholar]
- Daeichian, A.; Haghani, A. Fuzzy Q-learning-based multi-agent system for intelligent traffic control by a game theory approach. Arab. J. Sci. Eng. 2018, 43, 3241–3247. [Google Scholar] [CrossRef] [Green Version]
- Yusupbekov, N.; Marakhimov, A.; Igamberdiev, H.; Umarov, S.X. An adaptive fuzzy-logic traffic control system in conditions of saturated transport stream. Sci. World J. 2016, 2016, 6719459. [Google Scholar] [CrossRef] [Green Version]
- Hawi, R.; Okeyo, G.; Kimwele, M. Smart traffic light control using fuzzy logic and wireless sensor network. In Proceedings of the 2017 Computing Conference, London, UK, 18–20 July 2017; pp. 450–460. [Google Scholar]
- Alam, J.; Pandey, M.K. Design and analysis of a two stage traffic light system using fuzzy logic. J. Inf. Technol. Softw. Eng. 2015, 5, 1000162. [Google Scholar] [CrossRef]
- Li, L.; Lv, Y.; Wang, F.Y. Traffic signal timing via deep reinforcement learning. IEEE/CAA J. Autom. Sin. 2016, 3, 247–254. [Google Scholar]
- Kafash, M.; Menhaj, M.B.; Sharif, M.J.M.; Maleki, A. Designing fuzzy controller for traffic lights to reduce the length of queues in according to minimize extension of green light time and reduce waiting time. In Proceedings of the 2013 13th Iranian Conference on Fuzzy Systems (IFSC), Qazvin, Iran, 27–29 August 2013; pp. 1–6. [Google Scholar]
- Mir, A.; Hassan, A. Fuzzy inference rule based neural traffic light controller. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018; pp. 816–820. [Google Scholar]
- Yang, H.j.; Hu, X. Wavelet neural network with improved genetic algorithm for traffic flow time series prediction. Optik 2016, 127, 8103–8110. [Google Scholar] [CrossRef]
- Jafari, S.; Shahbazi, Z.; Byun, Y.C.; Lee, S.J. Lithium-Ion Battery Estimation in Online Framework Using Extreme Gradient Boosting Machine Learning Approach. Mathematics 2022, 10, 888. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, G.; Fierro, R.; Yang, Y. Force-driven traffic simulation for a future connected autonomous vehicle-enabled smart transportation system. IEEE Trans. Intell. Transp. Syst. 2018, 19, 2221–2233. [Google Scholar] [CrossRef]
- Shahbazi, Z.; Byun, Y.C. Machine Learning-Based Analysis of Cryptocurrency Market Financial Risk Management. IEEE Access 2022, 10, 37848–37856. [Google Scholar] [CrossRef]
- Fountoulakis, M.; Bekiaris-Liberis, N.; Roncoli, C.; Papamichail, I.; Papageorgiou, M. Highway traffic state estimation with mixed connected and conventional vehicles: Microscopic simulation-based testing. Transp. Res. Part Emerg. Technol. 2017, 78, 13–33. [Google Scholar] [CrossRef] [Green Version]
- Shahbazi, Z.; Byun, Y.C. NLP-Based Digital Forensic Analysis for Online Social Network Based on System Security. Int. J. Environ. Res. Public Health 2022, 19, 7027. [Google Scholar] [CrossRef]
- Liang, X.; Du, X.; Wang, G.; Han, Z. Deep reinforcement learning for traffic light control in vehicular networks. arXiv 2018, arXiv:1803.11115. [Google Scholar]
- Shahbazi, Z.; Byun, Y.C.; Kwak, H.Y. Smart Home Gateway Based on Integration of Deep Reinforcement Learning and Blockchain Framework. Processes 2021, 9, 1593. [Google Scholar] [CrossRef]
- Savithramma, R.; Sumathi, R.; Sudhira, H. A Comparative Analysis of Machine Learning Algorithms in Design Process of Adaptive Traffic Signal Control System. J. Phys. Conf. Ser. Iop Publ. 2022, 2161, 012054. [Google Scholar] [CrossRef]
- Ali, A.; Jamil, F.; Shahbazi, Z.; Jamil, H.; Kirichek, R.; Ahmed, W.; Abdullah, M. Enhanced Multi-Lingual Dictionary using Cloudlet based NLP Approach for Key Complications. Available online: https://scholar.googleusercontent.com/scholar?q=cache:zu9bkTznaM0J:scholar.google.com/+Enhanced+Multi-Lingual+Dictionary+using+Cloudlet+based+NLP+Approach+++for+Key+Complications&hl=en&as_sdt=0,5 (accessed on 1 August 2022).
- Shahbazi, Z.; Byun, Y.C. Improving the product recommendation system based-on customer interest for online shopping using deep reinforcement learning. Soft Comput. Mach. Intell. 2021, 1, 31–35. [Google Scholar]
- Agrawal, A.; Paulus, R. Intelligent traffic light design and control in smart cities: A survey on techniques and methodologies. Int. J. Veh. Inf. Commun. Syst. 2020, 5, 436–481. [Google Scholar] [CrossRef]
- Rapelli, M.; Casetti, C.; Sgarbi, M. A Distributed V2V-Based Virtual Traffic Light System. In Proceedings of the 2020 International Conference on COMmunication Systems & NETworkS (COMSNETS), Bengaluru, India, 7–11 January 2020; pp. 122–128. [Google Scholar]
- Younes, M.B.; Boukerche, A. An efficient dynamic traffic light scheduling algorithm considering emergency vehicles for intelligent transportation systems. Wirel. Netw. 2018, 24, 2451–2463. [Google Scholar] [CrossRef]
- Younes, M.B.; Boukerche, A. Intelligent traffic light controlling algorithms using vehicular networks. IEEE Trans. Veh. Technol. 2015, 65, 5887–5899. [Google Scholar] [CrossRef]
- Dubey, A.; Rane, S. Implementation of an intelligent traffic control system and real time traffic statistics broadcasting. In Proceedings of the 2017 International conference of Electronics, Communication and Aerospace Technology (ICECA), Coimbatore, India, 20–22 April 2017; Volume 2, pp. 33–37. [Google Scholar]
- Zhao, J.; Sun, X.; Li, Q.; Ma, X. Edge caching and computation management for real-time internet of vehicles: An online and distributed approach. IEEE Trans. Intell. Transp. Syst. 2020, 22, 2183–2197. [Google Scholar] [CrossRef]
- Amer, H.M.; Al-Kashoash, H.; Hawes, M.; Chaqfeh, M.; Kemp, A.; Mihaylova, L. Centralized simulated annealing for alleviating vehicular congestion in smart cities. Technol. Forecast. Soc. Chang. 2019, 142, 235–248. [Google Scholar] [CrossRef]
- Faye, S.; Chaudet, C.; Demeure, I. A distributed algorithm for adaptive traffic lights control. In Proceedings of the 2012 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16–19 September 2012; pp. 1572–1577. [Google Scholar]
- Frank, A.; Al Aamri, Y.S.K.; Zayegh, A. IoT based smart traffic density control using image processing. In Proceedings of the 2019 4th MEC International Conference on Big Data and Smart City (ICBDSC), Muscat, Oman, 15–16 January 2019; pp. 1–4. [Google Scholar]
- Li, Z.; Shahidehpour, M. Deployment of cybersecurity for managing traffic efficiency and safety in smart cities. Electr. J. 2017, 30, 52–61. [Google Scholar] [CrossRef]
- Zhao, L.; Wang, J.; Liu, J.; Kato, N. Routing for crowd management in smart cities: A deep reinforcement learning perspective. IEEE Commun. Mag. 2019, 57, 88–93. [Google Scholar] [CrossRef]
- Zadeh, L.A. Fuzzy sets. In Fuzzy Sets, Fuzzy Logic, and Fuzzy Systems: Selected Papers by Lotfi A Zadeh; World Scientific: Singapore, 1996; pp. 394–432. [Google Scholar]
- Sambas, A.; Rahayu, D.S. Rancang Bangun Robot Arm 2 Dof Berbasis Adaptive Neuro-Fuzzy Inference System (ANFIS). Al-Jazari J. Mech. Eng. 2018, 3, 41–45. [Google Scholar]
- Li, J.; Pan, X.; Wang, X. State-space equations and the first-phase algorithm for signal control of single intersections. Tsinghua Sci. Technol. 2007, 12, 231–235. [Google Scholar] [CrossRef]
- Azimirad, E.; Pariz, N.; Sistani, M.B.N. A novel fuzzy model and control of single intersection at urban traffic network. IEEE Syst. J. 2010, 4, 107–111. [Google Scholar] [CrossRef]
- Iyer, V.; Jadhav, R.; Mavchi, U.; Abraham, J. Intelligent traffic signal synchronization using fuzzy logic and Q-learning. In Proceedings of the 2016 International Conference on Computing, Analytics and Security Trends (CAST), Pune, India, 19–21 December 2016; pp. 156–161. [Google Scholar]
- Maddiboyina, H.V.; Ponnapalli, V.S. Fuzzy logic based VANETS: A review on smart transportation system. In Proceedings of the 2019 International Conference on Computer Communication and Informatics (ICCCI), Coimbatore, India, 23–25 January 2019; pp. 1–4. [Google Scholar]
- Mohanaselvi, S.; Shanpriya, B. Application of fuzzy logic to control traffic signals. In AIP Conference Proceedings; AIP Publishing LLC: Melville, NY, USA, 2019; Volume 2112, p. 020045. [Google Scholar]
- Ayuba, P.; Zachariah, B.; Damuut, L.P. Modification of fuzzy logic rule base in the optimization of traffic light control system. Sci. World J. 2018, 13, 6–11. [Google Scholar]
- Merbah, A.; Makrizi, A. Optimal management adaptive of two crossroads by genetic algorithm. Int. J. Model. Simul. Sci. Comput. 2019, 10, 1950009. [Google Scholar] [CrossRef]
- El Bakkal, S.; Lakhouili, A.; Essoufi, E.H. Modeling and Simulation of Adaptive Traffic Control System for Multi-Intersection Management using Cellular Automaton and Queuing System. Int. J. Adv. Comput. Sci. Appl. 2022, 13, 938–947. [Google Scholar] [CrossRef]
- Yang, J.; Zhang, J.; Wang, H. Urban traffic control in software defined internet of things via a multi-agent deep reinforcement learning approach. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3742–3754. [Google Scholar] [CrossRef]
- Guo, M.; Wang, P.; Chan, C.Y.; Askary, S. A reinforcement learning approach for intelligent traffic signal control at urban intersections. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 4242–4247. [Google Scholar]
- Cao, Y.; Raise, A.; Mohammadzadeh, A.; Rathinasamy, S.; Band, S.S.; Mosavi, A. Deep learned recurrent type-3 fuzzy system: Application for renewable energy modeling/prediction. Energy Rep. 2021, 7, 8115–8127. [Google Scholar] [CrossRef]
- Pohan, A.H.; Latiff, L.A.; Dziyauddin, R.A.; Wahab, N.H.A. Mitigating Traffic Congestion at Road Junction using Fuzzy Logic. Int. J. Adv. Comput. Sci. Appl. 2021, 12, 293–299. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No | Method | Goal | Technology | Type of Network |
|---|---|---|---|---|
| [46] | Computation management | Optimization, reduce traffic | Artificial intelligent | General network |
| [47] | Centralized simulated | Optimal vehicle, emission minimization | Internet of Things | General network |
| [48] | Adaptive control algorithm | Average waiting time | Wireless sensor networks | Isolated intersection |
| [49] | Image processing | Emission minimization | Internet of Things | Isolated intersection |
| [50] | Deployment of cybersecurity | Optimization, reduce traffic jam, vehicle stop minimization | Internet of things | General network |
| [51] | Deep reinforcement learning | Average travel distance, Average travel time | Artificial intelligent | General network |
| No | Type of Values | Value |
|---|---|---|
| (1) | Traffic flow position | |
| (2) | Non-saturation | |
| (3) | Saturation | |
| (4) | Super-saturation | |
| (5) | Stable |
| Ref. No | Utilized Method | Target | Limitation |
|---|---|---|---|
| [60] | Genetic algorithm | Minimizes the traffic waiting time | Two intersections |
| [61] | Adaptive traffic control system | Reduces and minimizes the average waiting time of vehicles | Four intersections |
| [62] | Multi-agent deep reinforcement learning | Reduces traffic jams | Six intersections |
| [63] | Reinforcement learning | The performance queue length and wait time | Eight intersections |
| Our method | Fuzzy logic control system | Reduces queue length and optimization | Eight intersections |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jafari, S.; Shahbazi, Z.; Byun, Y.-C. Improving the Road and Traffic Control Prediction Based on Fuzzy Logic Approach in Multiple Intersections. Mathematics 2022, 10, 2832. https://doi.org/10.3390/math10162832
Jafari S, Shahbazi Z, Byun Y-C. Improving the Road and Traffic Control Prediction Based on Fuzzy Logic Approach in Multiple Intersections. Mathematics. 2022; 10(16):2832. https://doi.org/10.3390/math10162832
Chicago/Turabian StyleJafari, Sadiqa, Zeinab Shahbazi, and Yung-Cheol Byun. 2022. "Improving the Road and Traffic Control Prediction Based on Fuzzy Logic Approach in Multiple Intersections" Mathematics 10, no. 16: 2832. https://doi.org/10.3390/math10162832
APA StyleJafari, S., Shahbazi, Z., & Byun, Y.-C. (2022). Improving the Road and Traffic Control Prediction Based on Fuzzy Logic Approach in Multiple Intersections. Mathematics, 10(16), 2832. https://doi.org/10.3390/math10162832