
Visualizing a Cubic Linkage through the Use of CAS and DGS


Abstract
1. Introduction
2. A Mathematical Model for Linkages
2.1. Selection of the Model
- 1.
- (Existence) For which abstract linkages does there exist a realization in ?
- 2.
- (Rigidity) Which abstract linkages admit just one realization in up to congruence?
- 3.
- (Configuration space) How is the space of all possible realizations of an abstract linkage? What is its dimension, topology…?
Since (squared) distance constraints satisfied by the joint coordinates are given by quadratic polynomials, it is possible to try to analyze the set of all realizations of a given pair symbolically using computational algebra. However, a Gröbner basis for an ideal generated by quadratic polynomials in k variables can require generators of degree so computations with the squared distance constraints may quickly become intractable. Moreover, care must be taken in applying results from algebraic geometry in this setting as we are interested in realizations over the real numbers, and many results in algebraic geometry require an algebraically closed ground field.
- >
- with(PolynomialIdeals):
- >
- IL1:=<(Bx − Ax)^2 + (By − Ay)^2 − 1, (Cx − Bx)^2 + (Cy − By)^2 − 1,(Ax − Cx)^2 + (Ay − Cy)^2 − 1>
- >
- HilbertDimension(IL1)
- >
- with(PolynomialIdeals):
- >
- ILQ1:=<(Bx − Ax)^2 + (By − Ay)^2 − 1, (Cx − Bx)^2 + (Cy − By)^2 − 1,(Ax − Cx)^2 + (Ay − Cy)^2 − 1, Ax, A_y, B_x − 1, B_y>
- >
- HilbertDimension(ILQ1)
- >
- solve(Generators(ILQ1), {Cx, Cy})
2.2. Some Issues concerning the Model
2.2.1. An Algebraic Definition of Rigidity
2.2.2. Complex Versus Real Realizations
- >
- with(PolynomialIdeals):
- >
- IL2:=<(Bx − Ax)^2 + (By − Ay)^2 + (Bz − Az)^2 − 1,(Cx − Bx)^2 + (Cy − By)^2 + (Cz − Bz)^2 − 1,(Cx − Ax)^2 + (Cy − Ay)^2 + (Cz − Az)^2 − 4,Ax, Ay, Az, Cx − 2, Cy, Cz>
- >
- HilbertDimension(IL2)
2.2.3. Faithfulness of the Model
2.2.4. Complexity of the Model
- >
- with(PolynomialIdeals):
- >
- IC:=<(Ex − Ox)^2 + (Ey − Oy)^2 + (Ez − Oz)^2 − 1,(Fx − Ex)^2 + (Fy − Ey)^2 + (Fz − Ez)^2 − 1,(Ux − Fx)^2 + (Uy − Fy)^2 + (Uz − Fz)^2 − 1,(Ox − Ux)^2 + (Oy − Uy)^2 + (Oz − Uz)^2 − 1,(Dx − Ax)^2 + (Dy − Ay)^2 + (Dz − Az)^2 − 1,(Jx − Dx)^2 + (Jy − Dy)^2 + (Jz − Dz)^2 − 1,(Bx − Jx)^2 + (By − Jy)^2 + (Bz − Jz)^2 − 1,(Ax − Bx)^2 + (Ay − By)^2 + (Az − Bz)^2 − 1,(Ax − Ox)^2 + (Ay − Oy)^2 + (Az − Oz)^2 − 1,(Dx − Ex)^2 + (Dy − Ey)^2 + (Dz − Ez)^2 − 1,(Jx − Fx)^2 + (Jy − Fy)^2 + (Jz − Fz)^2 − 1,(Bx − Ux)^2 + (By − Uy)^2 + (Bz − Uz)^2 − 1>
- >
- HilbertDimension(IC)
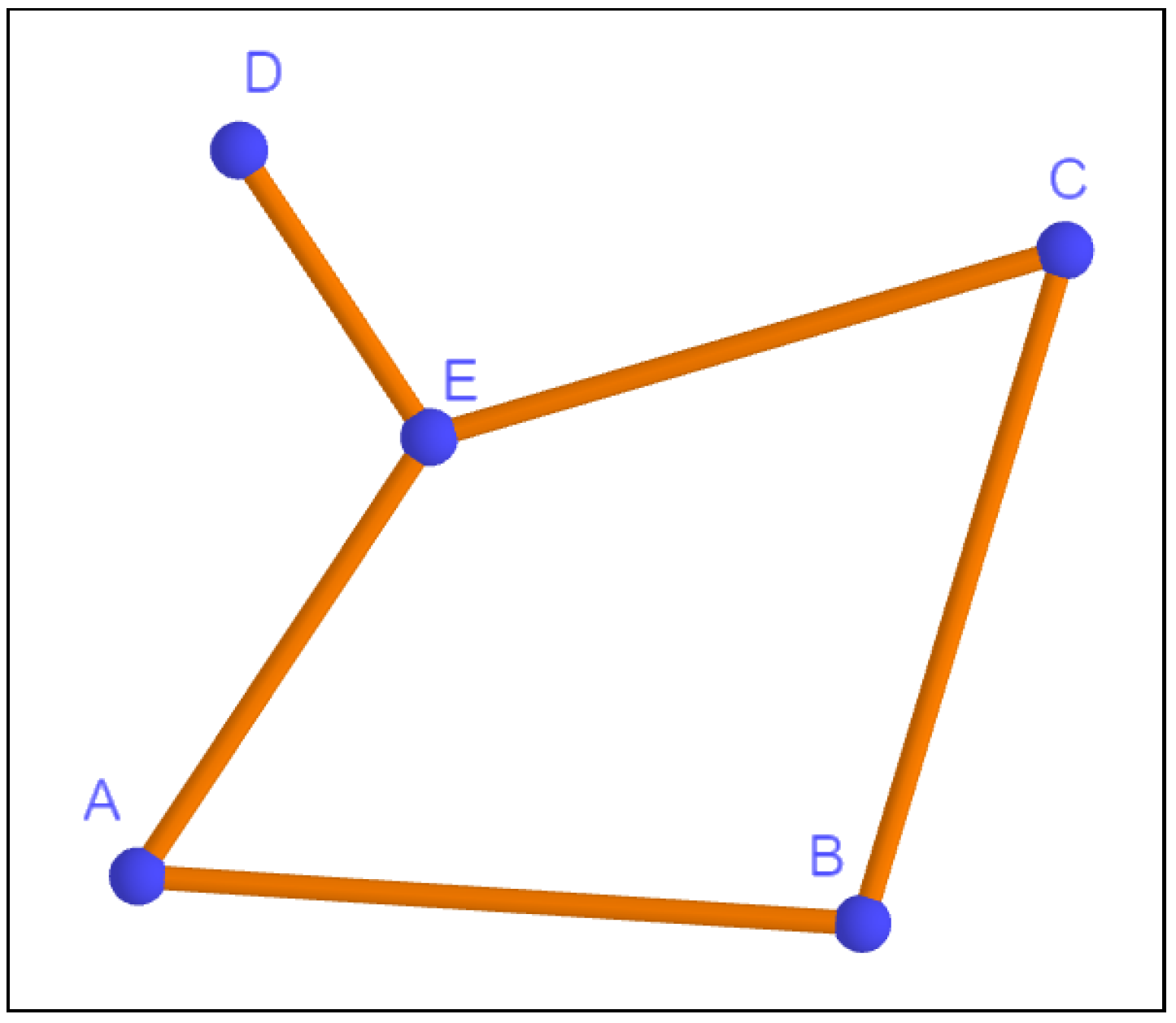
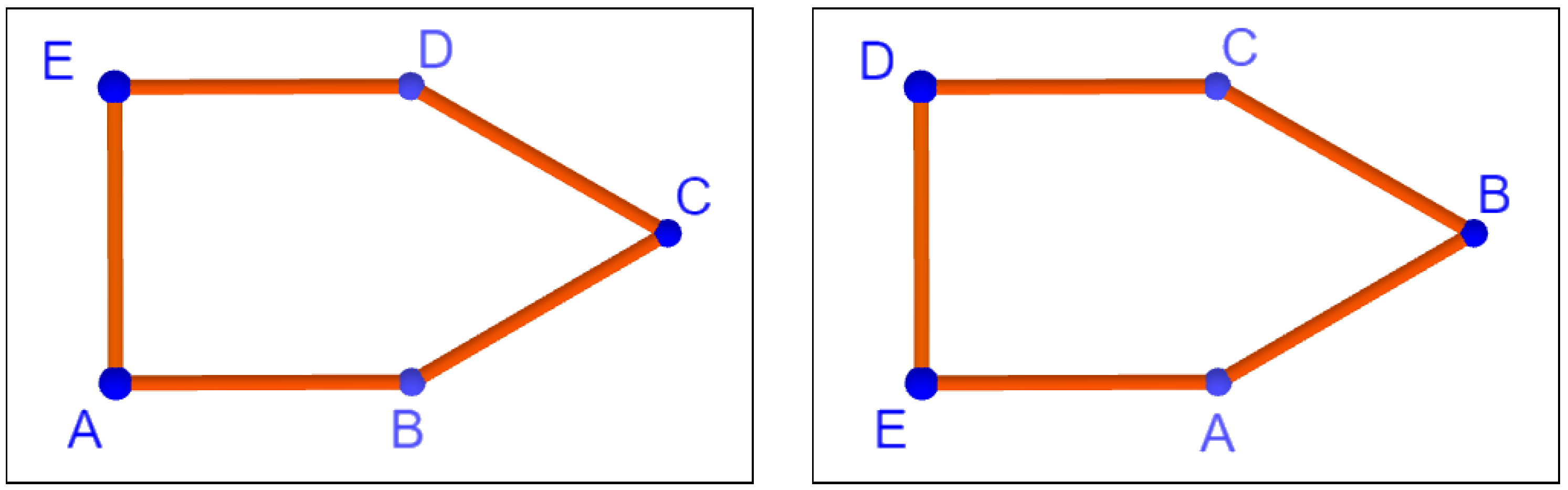
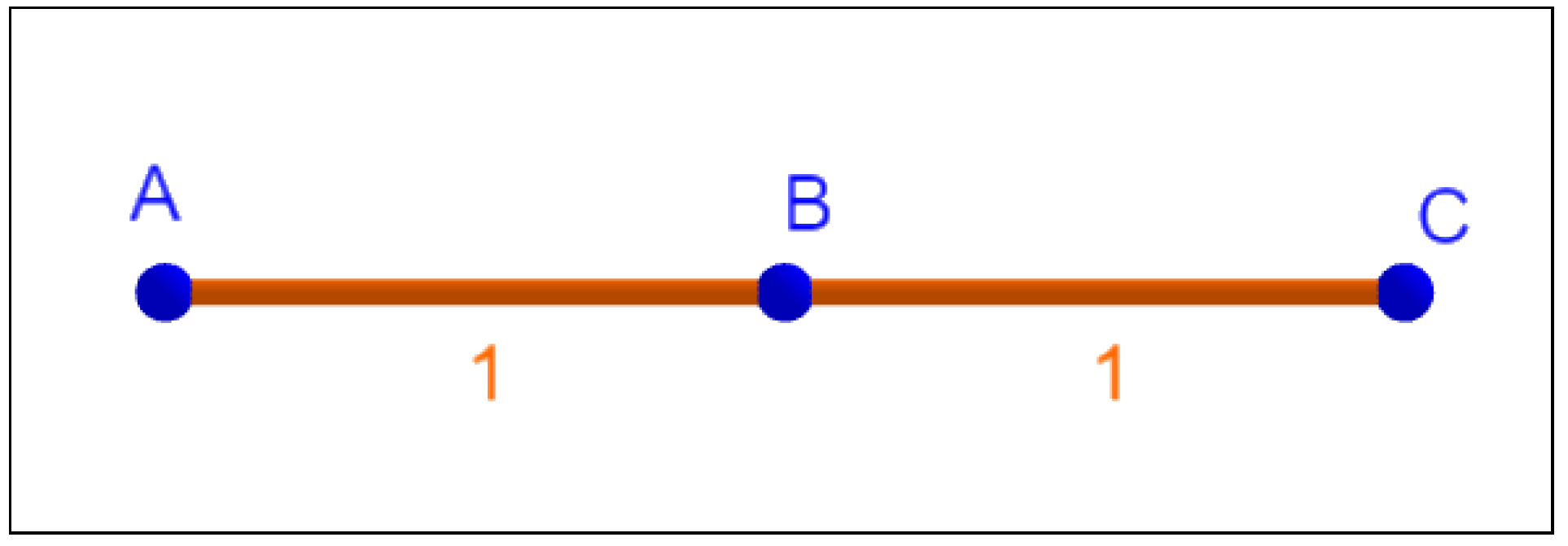
2.3. Introductory Examples
- >
- with(PolynomialIdeals):
- >
- IL4:=<(Ax − Bx)^2 + (Ay − By)^2 − 1,(Ax − Cx)^2 + (Ay − Cy)^2 − 1,Dx − Bx)^2 + (Dy − By)^2 − 1, (Dx − Cx)^2 + (Dy − Cy)^2 − 1,((Dx − Ax)^2 + (Dy − Ay)^2 − 2>
- >
- HilbertDimension(IL4)
- >
- IsRadical(IL4);PD:={PrimeDecomposition(IL4)};
- >
- for i from 1 to 4 do HilbertDimension(PD[i]) od;
- >
- K:=<Ax − tx, Ay − ty, Bx − a − tx, By − c − ty, Cx − a − tx,Cy − c − ty, Dx − a − b − tx, Dy − c − d − ty,0, 0, 0, 0, 0,a^2 + c^2 − 1, b^2 + d^2 − 1, a*b + c*d, a*d − b*c − 1>;
- >
- H:=EliminationIdeal(K,{Ax,Ay,Bx,By,Cx,Cy,Dx,Dy});
- >
- PrimeDecomposition(H);
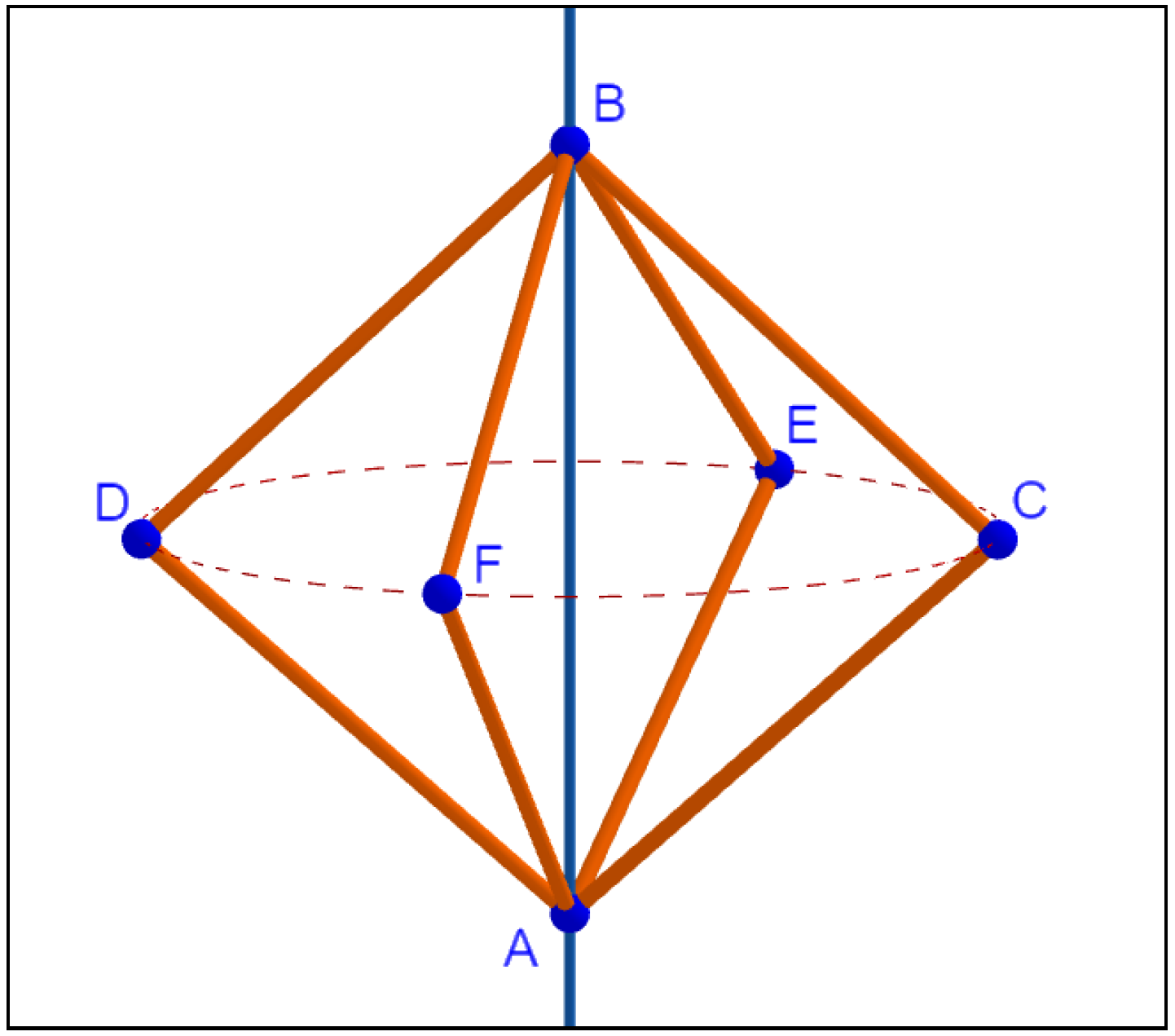
3. The Cubic Linkage
3.1. Degrees of Freedom for the Vertices
- >
- with(PolynomialIdeals):
- >
- (Fx − Ex)^2 + (Fy − Ey)^2 + Fz^2 − 1, Ax^2 + Ay^2 + Az^2 − 1,Bx^2 + (By − 1)^2 + Bz^2 − 1, (Fx − Jx)^2 + (Fy − Jy)^2+ (Fz − Jz)^2 − 1, (Ex − Dx)^2 + (Ey − Dy)^2 + Dz^2 − 1,(Bx − Ax)^2 + (By − Ay)^2 + (Bz − Az)^2 − 1, (Bx − Jx)^2+ (By − Jy)^2 + (Bz − Jz)^2 − 1, (Dx − Ax)^2 + (Dy − Ay)^2+ (Dz − Az)^2 − 1, (Dx − Jx)^2 + (Dy − Jy)^2 + (Dz − Jz)^2 − 1,Ax, Ay, Az − 1, Bx, By − 1, Bz − 1, Jx − Fx, Jy − Fy,Jz − Fz − 1, Dx − Ex, Dy − Ey, Dz − 1>
- >
- IF:= EliminationIdeal(I_1,{Fx, Fy, Fz})
- >
- HilbertDimension(IF)
3.2. Dimension of the Cube
- >
- with(PolynomialIdeals):
- >
- IA:=<Ex^2 + Ey^2 − 1, Fx^2 + (Fy − 1)^2 + Fz^2 − 1,(Fx − Ex)^2 + (Fy − Ey)^2 + Fz^2 − 1,Bx^2 + (By − 1)^2 + Bz^2 − 1, (Fx − Jx)^2 + (Fy − Jy)^2 + (Fz − Jz)^2 − 1,(Ex − Dx)^2 + (Ey − Dy)^2 + (Dz)^2 − 1,(Bx − Jx)^2 + (By − Jy)^2 + (Bz − Jz)^2 − 1,(Dx − Jx)^2 + (Dy − Jy)^2 + (Dz − Jz)^2 − 1 >;
- >
- HilbertDimension(IA)
3.3. Rigidification of the Cube
- >
- with(PolynomialIdeals):
- >
- RC:=<Ex^2 + Ey^2 − 1,Fx^2 + (Fy − 1)^2 + Fz^2 − 1,(Fx − Ex)^2 + (Fy − Ey)^2 + Fz^2 − 1, Ax^2 + Ay^2 + Az^2 − 1,Bx^2 + (By − 1)^2 + Bz^2 − 1, (Fx − Jx)^2 + (Fy − Jy)^2 + (Fz − Jz)^2 − 1,(Ex − Dx)^2 + (Ey − Dy)^2 + (Dz)^2 − 1, (Bx − Ax)^2 + (By − Ay)^2+(Bz − Az)^2 − 1, (Bx − Jx)^2 + (By − Jy)^2 + (Bz − Jz)^2 − 1,(Dx − Ax)^2 + (Dy − Ay)^2 + (Dz − Az)^2 − 1, (Dx − Jx)^2 + (Dy − Jy)^2+(Dz − Jz)^2 − 1, Ex^2 + (Ey − 1)^2 − 2, Ax^2 + (Ay − 1)^2 + Az^2 − 2,Jx^2 + (Jy − 1)^2 + Jz^2 − 2, (Jx − Ex)^2 + (Jy − Ey)^2 + Jz^2 − 2,(Ax − Ex)^2 + (Ay − Ey)^2 + Az^2 − 2, (Ax − Jx)^2 + (Ay − Jy)^2+(Az − Jz)^2 − 2>
- >
- HilbertDimension(%)
- >
- PP := {PrimaryDecomposition(CR)}:nops(%)
- >
- PRP:=PrimeDecomposition(CR)
- >
- for i from 1 to 64 do IdealContainment(PP[i],PRP[i],PP[i]) od,
- we can also check that the primary ideals in the primary decomposition of are actually prime. Each of these 0-dimensional 64 prime ideals corresponds to a realization of the rigidified cube. They can be explicitly obtained in Maple with
- >
- for i from 1 to 64 do H[i]:=Basis(PP[i],tdeg) od:for i from 1 to 64 do S[i]:=solve(H[i],{Ex,Ey,Ax,Ay,Az,Jx, Jy, Jz, Fx, Fy, Fz, Bx, By, Bz, Dx, Dy, Dz}) od;for i from 1 to 64 do subs(S[i], CR) od:
4. A Visual Modelization of the Cube in Geogebra
4.1. Problems Arising in Dynamic Geometry Models
4.1.1. The Hierarchy of Dg Constructions
4.1.2. The Problem of Continuity
4.2. Description of Our Visual Models
- 1.
- Our model can be positioned in any admissible realization, including degenerate ones, after fixing the position of the observer by determining the vertices O, U and E as described in Section 3.
- 2.
- The model is continuous, and joints and bars behave as expected in a real linkage model.
- 3.
- When selecting a vertex to drag it, it has the maximum geometrically possible degree of freedom, as shown in Table 1.
- 4.
- It is reasonably easy to obtain some distinguished configurations, including degenerate ones such as those described in [23].
- Black: Fixed vertices.
- Grey: Vertices with 0 degrees of freedom.
- Blue: Vertices with 1 degree of freedom.
- Green: Vertices with 2 degrees of freedom.
4.3. Related Constructions in Geogebra
- Planar linkages:
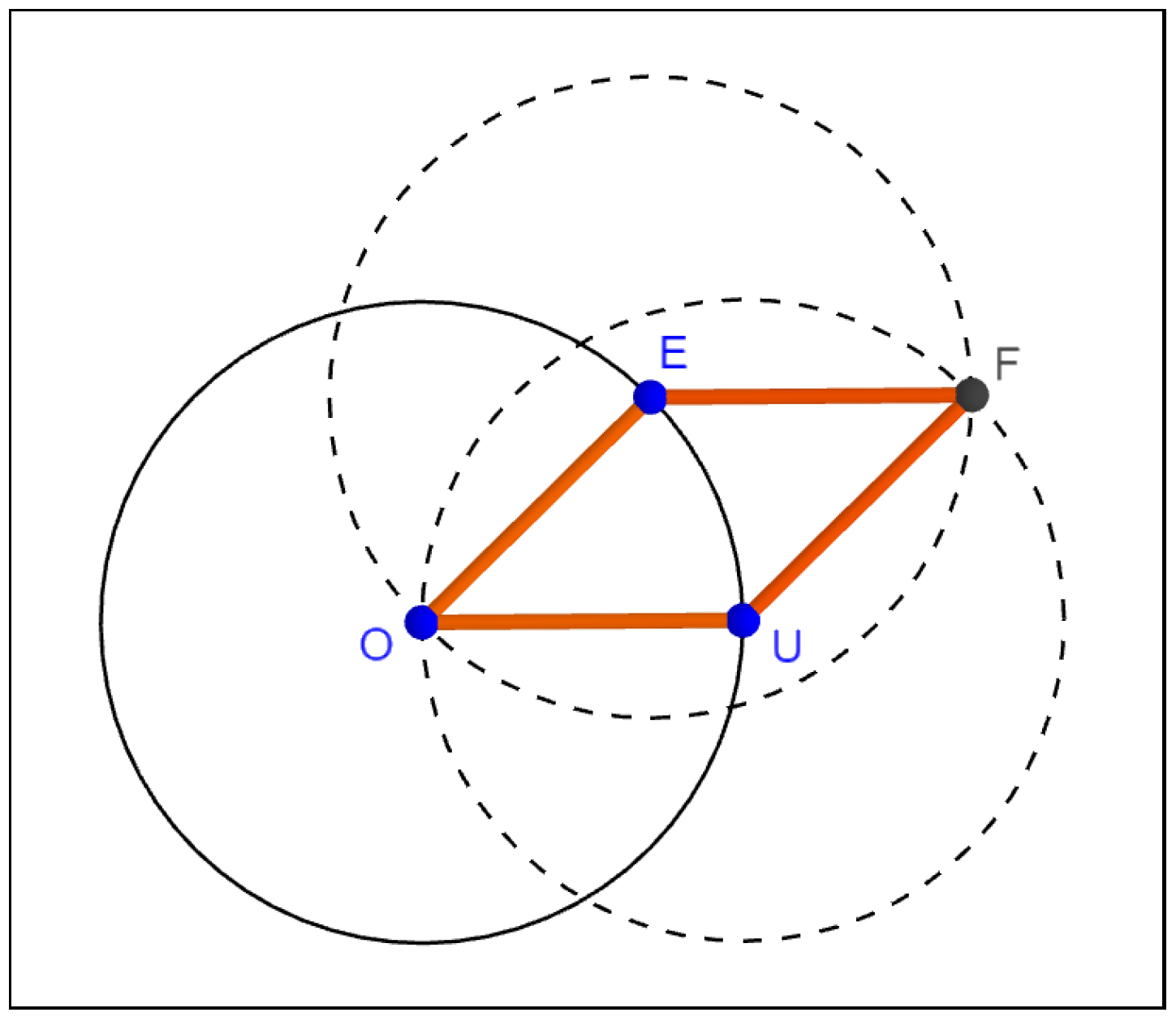
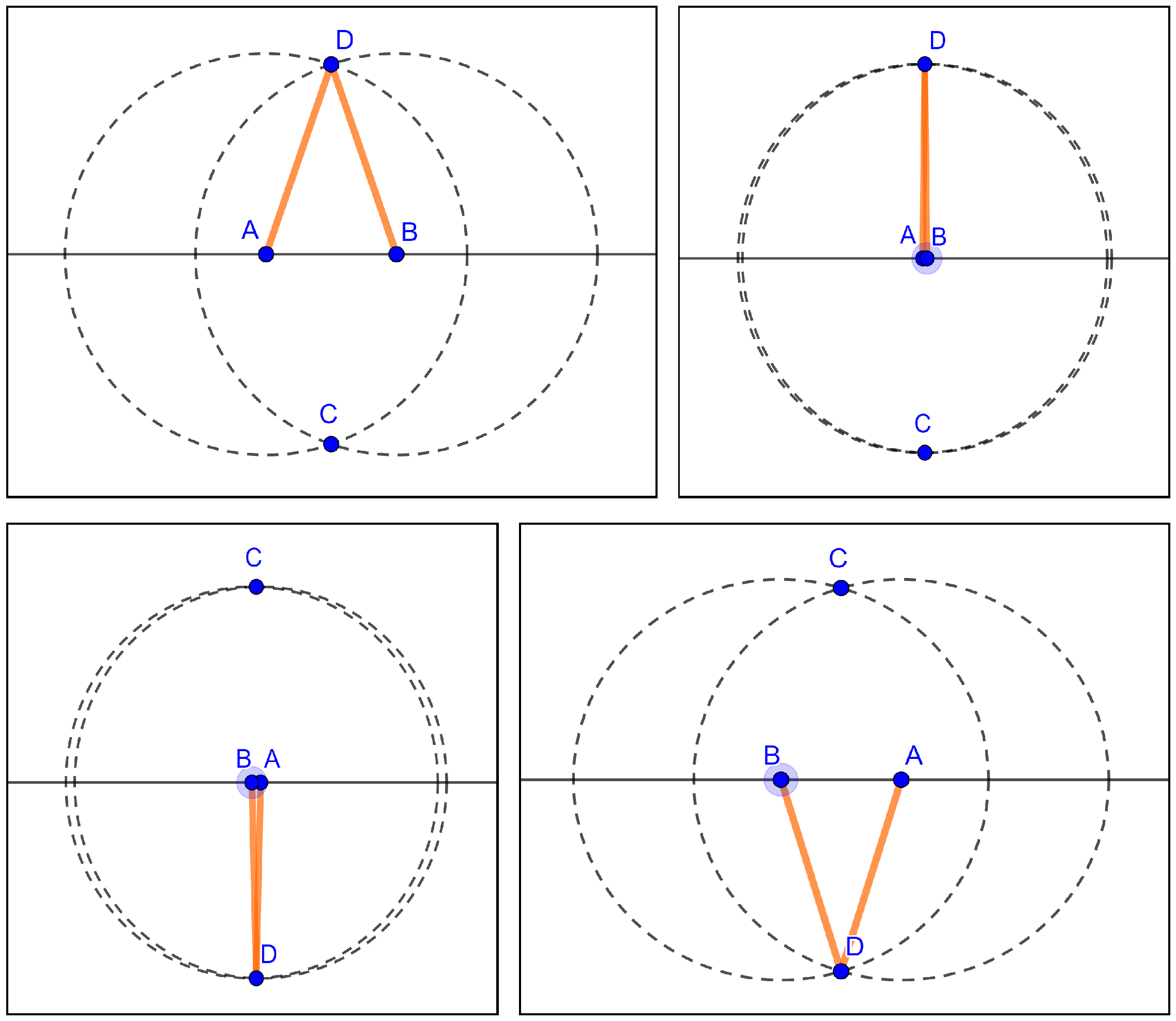
- This section describes the fundamentals of planar linkages construction, especially the rhombus (4-bar linkage), as it is the simplest closed and flexible planar configuration available. The intrinsic problems that appear with the use of DGS and are commented on in Section 4.1 are also introduced. Finally, examples of the use of scripts are shown to try to solve them, such as the one that enables the transmission of movement between vertices—what we call the dragging effect—in contrast with traditional geometric constructions in DGS.
- Other planar linkages:
- Although the main objective of this GeoGebra book is the study of the structure of the cubic linkage, which corresponds to a graph without one-degree vertices, we considered also chains with either free or fixed extremes (partly because of their interest in connection with applications such as simulations of robotic arms), improving their modeling thanks to the dragging effect mentioned above. In this section, we can see some simple planar examples.
- 3D linkages:
- This section serves as an introduction to the study of the articulated cube. It shows, in simpler structures, some examples of the problems that will appear in the construction of the cube, such as visualizing certain linkages to decide on their rigidity (as in [28]) or the sudden changes in degrees of freedom mentioned in Example 3.
- Articulated cube:
- This is the main section of the GeoGebra book. In addition to constructions 1 and 2 in Section 4.2, we can observe the cube with 6 added bars as described in Section 3.3, with all its 64 possible realizations obtained by means of six parametrized variables. In the opposite direction, a cube is also shown in which no constraints are imposed on its vertices apart from those determined by the fixed length of the bars ([29]). Thanks to the dragging effect already mentioned, which goes beyond the algebraic treatment of linkages developed here, this construction behaves in a very realistic way, offering even an apparent physical behaviour connected to the inner workings of the GeoGebra software.
4.4. Conclusions and Future Work
- (i)
- “Yet, we have to report that some jumps occur between isomer positions, near singular placements. For instance, when , the parallelogram collapses. In view of the large bibliography on the continuity problem for dynamic geometry, it seems a non-trivial task to model a cube avoiding, if possible at all, such behavior.”Even though we did not completely solve the continuity problem for linkages, which constitutes an intrinsic difficulty in DGS geometric constructions, through the use of GeoGebra scripts, we have been able to simulate continuity in some of them (see, for example, [29]), although in the process we have lost some of the cleanliness of more formal, purely geometric constructions.
- (ii)
- “We remark that the cube we have modeled has six internal degrees of freedom, one for each free parameter we have introduced. But its distribution has not been homogeneous. For instance, the final vertex has been constructed without any degrees of freedom, by imposing some constraints: being simultaneously in a sphere and in two planes perpendicular to some diagonals. This difficulty to make a model where all semi-free vertices behave homogeneously is apparently similar to the planar parallelogram case, but now we cannot conclude that it is impossible to make such a construction, since, after fixing O and U we still have six vertices and six degrees of freedom. It is probably a consequence of our approach and not an intrinsic characteristic.”With respect to the dimension of the cube and the possible degrees of freedom for its vertices, we have completely solved the associated algebraic problem in Section 3, and with respect to distributing homogeneusly the six available degrees of freedom among six vertices of the cube, we have found a construction (see [30]) that achieves this, although without keeping fixed the adjacent vertices O and U.
- (iii)
- “Could you fix (say, by pasting some rigid plates) one, two,…facets in the cube and still have some flexibility on the cube? How many internal degrees of freedom will remain?"Some examples of adding bars to limit the flexibility of the cube and the corresponding algebraic discussion have been shown in Section 3.3.
- (iv)
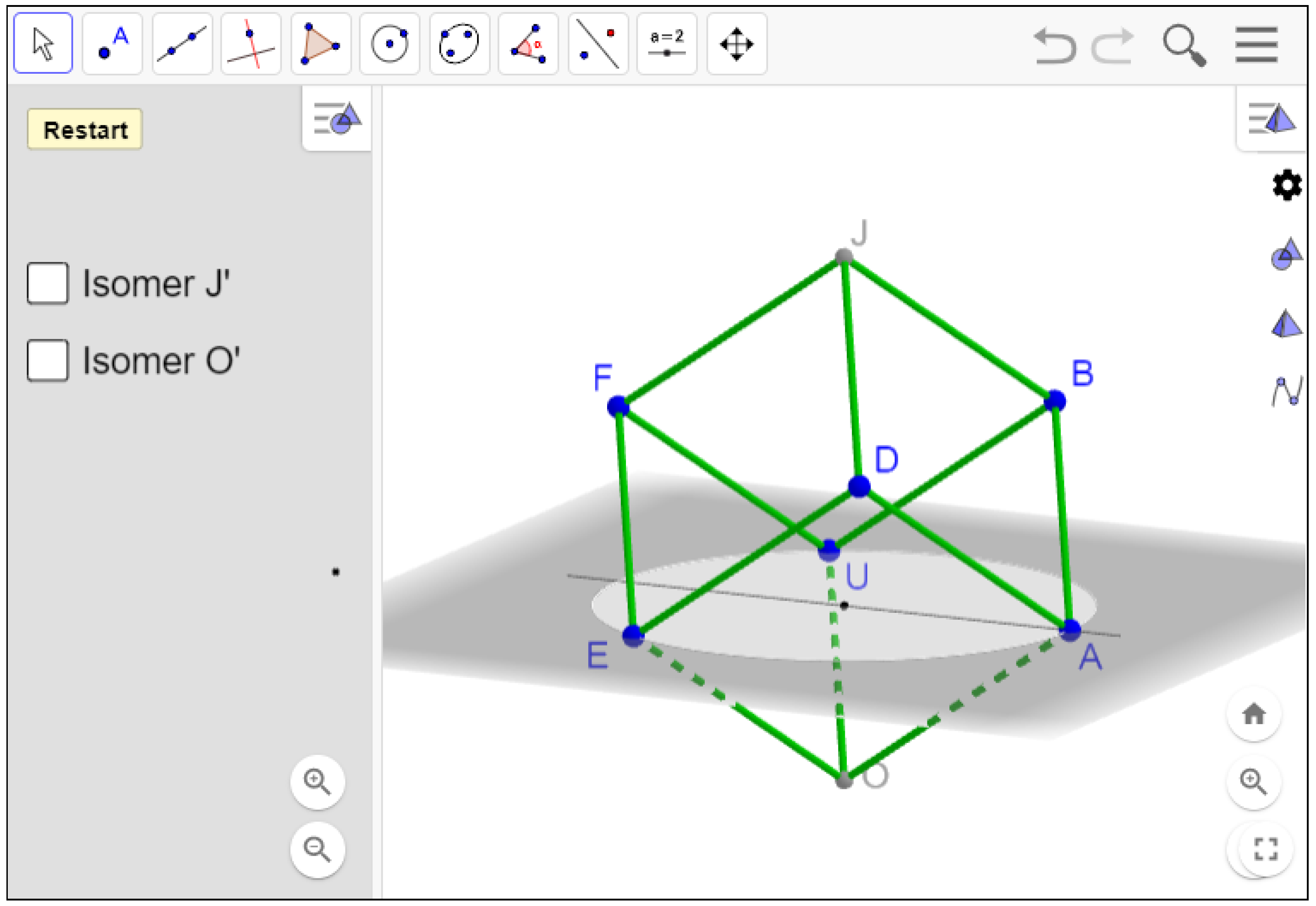
- “For a planar parallelogram, one can feel the one-degree of freedom by checking that once you fix one semi-free vertex, the whole parallelogram gets fixed. The same applies for the spatial parallelogram. You have to fix, one after another, the two semi-free vertices. For the cube, how can you feel its six degrees of freedom? Can you fix five semi-free vertices and still move the cube?"Construction [30] (see also Figure 16) shows an example of a semi-free linkage for the cube where the six degrees of freedom of its internal configurations have been evenly distributed among six of its vertices (U, A, E, B, D and F), leaving two of them (O and J) with 0 degrees of freedom. Notice that, in non-degenerate configurations, dragging any of the vertices B, D or F will leave fixed all the other five vertices with one degree of freedom. This answers (at least partially) in the affirmative the question above.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DGS | Dynamic geometry software |
| CAS | Computer algebra system |
References
- Kortenkamp, U. Foundations of Dynamic Geometry. Ph.D. Thesis, Swiss Federal Institute of Technology Zurich, Zurich, Switzerland, 1999. [Google Scholar]
- Gao, X.S. Automated Geometry Diagram Construction and Engineering Geometry. In Lecture Notes in Artificial Intelligence; Gao, X.S., Wang, D., Yang, L., Eds.; Springer: Berlin/Heidelberg, Germany, 1999; Volume 1669, pp. 232–257. [Google Scholar]
- Abanades, M.; Botana, F.; Montes, A. and Recio, T. An algebraic taxonomy for locus computation in dynamic geometry. Comput. Aided Des. 2014, 56, 22–33. [Google Scholar] [CrossRef]
- De Graeve, R.; Parisse, B. Giac/Xcas (v. 1.7.0, 2021). Available online: https://www-fourier.ujf-grenoble.fr/~parisse/giac.html (accessed on 29 July 2021).
- Kovács, Z.; Parisse, B. Giac and GeoGebra—Improved Gröbner Basis Computations. In Computer Algebra and Polynomials; Gutiérrez, J., Schicho, J., Weimann, M., Eds.; Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2015; pp. 126–138. [Google Scholar]
- Polo-Blanco, I. Theory and History of Geometric Models. Ph.D. Thesis, University of Groningen, Groningen, The Netherlands, 2007. [Google Scholar]
- Imaginary. Available online: https://www.imaginary.org/ (accessed on 26 February 2022).
- Connelly, R.; Demaine, E.D. Geometry and Topology of Polygonal Linkages. In Handbook of Discrete and Computational Geometry, 3rd ed.; Goodman, J.E., O’Rourke, J., Tóth, C.D., Eds.; Chapman and Hall/CRC: New York, NY, USA, 2017. [Google Scholar]
- Jordan, D.; Steiner, M. Configuration Spaces of Mechanical Linkages. Discret. Comput. Geom. 1999, 22, 297–315. [Google Scholar] [CrossRef][Green Version]
- Arranz, J.M.; Losada, R.; Mora, J.A.; Recio, T.; Sada, M. Modeling the cube using GeoGebra. In Model-Centered Learning: Pathways to Mathematical Understanding Using GeoGebra; Bu, L., Schoen, R., Eds.; Sense Publishers: Rotterdam, The Netherlands, 2011; pp. 119–131. [Google Scholar]
- Bartolini Bussi, M.G.; Taimina, D.; Isoda, M. Concrete models and dynamic instruments as early technology tools in classrooms at the dawn of ICMI: From Felix Klein to present applications in mathematics classrooms in different parts of the world. ZDM Math. Educ. 2009, 42, 19–31. [Google Scholar] [CrossRef]
- Sidman, J.; St. John, A. The rigidity of frameworks: Theory and applications. Not. Ams 2017, 67, 973–979. [Google Scholar] [CrossRef]
- Recio, T.J.; González-López, M.J. Formal Determination of Polynomial Consequences of Real Orthogonal Matrices. In Recent Advances in Real Algebraic Geometry and Quadratic Forms: Proceedings of the RAGSQUAD Year, Berkeley, 1990–1991; Jacob, W.B., Lam, T.W., Robson, R.O., Eds.; AMS: Providence, RI, USA, 1994. [Google Scholar]
- Roth, B. Rigid and flexible frameworks. Amer. Math. Monthly 1981, 88, 6–21. [Google Scholar] [CrossRef]
- Connelly, R. Rigidity. In Handbook of Convex Geometry, Vol. A.; Gruber, P.M., Wills, J.M., Eds.; Elsevier: Amsterdam, The Netherlands, 1993. [Google Scholar]
- Asimow, L.; Roth, B. The rigidity of graphs. Trans. Amer. Math. Soc. 1978, 245, 279–289. [Google Scholar] [CrossRef]
- Asimow, L.; Roth, B. The rigidity of graphs, II. J. Math. Anal. Appl. 1979, 68, 171–190. [Google Scholar] [CrossRef]
- Blanc, D.; Shvalb, N. Configuration spaces of spatial linkages: Taking collisions into account. Bull. Korean Math. Soc. 2017, 54, 2183–2210. [Google Scholar] [CrossRef]
- Brown, C.W.; Kovács, Z.; Recio, T.; Vajda, R.; Vélez, M.P. Is computer algebra ready for conjecturing and proving geometric inequalities in the classroom? In Proceedings of the 26th Conference on Applications of Computer Algebra, Book of Abstracts, Virtual. 23–27 July 2021. [Google Scholar]
- Intersection of Two Spheres. Available online: https://www.geogebra.org/m/h3gbmymu#material/jcyqnmpb (accessed on 5 May 2022).
- Parametrized Rigid Cube. Available online: https://www.geogebra.org/m/h3gbmymu#material/ycc5txth (accessed on 10 May 2022).
- Kortenkamp, U.H.; Richter-Gebert, J. Complexity issues in Dynamic Geometry. In Foundations of Computational Mathematics. Proceedings of SMALEFEST 2000, Hong Kong, China, 13–17 July 2000; Cucker, F., Rojas, J.M., Eds.; LNAI, 2061; World Scientific: Singapore, 2002; pp. 355–404. [Google Scholar]
- Teixidor Cadena, E. Pajifiguri: Un material manipulativo y cuento interactivo. Números Revista de Didáctica de las Matemáticas 2010, 74, 75–92. [Google Scholar]
- 3D Graphics View. Available online: https://wiki.geogebra.org/en/3D_Graphics_View (accessed on 1 May 2022).
- Articulated Cube (I). Available online: https://www.geogebra.org/m/h3gbmymu#material/txqqrqst (accessed on 8 May 2022).
- Articulated Cube (II). Available online: https://www.geogebra.org/m/h3gbmymu#material/tcsy4jut (accessed on 8 May 2022).
- Linkages. Available online: https://www.geogebra.org/m/h3gbmymu (accessed on 10 May 2022).
- Articulated Prism. Available online: https://www.geogebra.org/m/h3gbmymu#material/qqhj2raa (accessed on 10 May 2022).
- Free Articulated Cube. Available online: https://www.geogebra.org/m/h3gbmymu#material/zeagkrck (accessed on 8 May 2022).
- Distributing Degrees of Freedom. Available online: https://www.geogebra.org/m/h3gbmymu#material/sff2cs29 (accessed on 10 May 2022).
- Teixidor Cadenas, E. 3D, 2D, 1D. Números Revista de Didáctica de las Matemáticas 2016, 92, 93–103. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vertex | Variables | Restrictions | Degrees of Freedom |
|---|---|---|---|
| O | — | 0 | |
| U | — | 0 | |
| A | 2 | ||
| B | 2 | ||
| D | 3 | ||
| E | 1 | ||
| F | 2 | ||
| J | 3 | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Recio, T.; Losada-Liste, R.; Tabera, L.F.; Ueno, C. Visualizing a Cubic Linkage through the Use of CAS and DGS. Mathematics 2022, 10, 2550. https://doi.org/10.3390/math10152550
Recio T, Losada-Liste R, Tabera LF, Ueno C. Visualizing a Cubic Linkage through the Use of CAS and DGS. Mathematics. 2022; 10(15):2550. https://doi.org/10.3390/math10152550
Chicago/Turabian StyleRecio, Tomás, Rafael Losada-Liste, Luis Felipe Tabera, and Carlos Ueno. 2022. "Visualizing a Cubic Linkage through the Use of CAS and DGS" Mathematics 10, no. 15: 2550. https://doi.org/10.3390/math10152550
APA StyleRecio, T., Losada-Liste, R., Tabera, L. F., & Ueno, C. (2022). Visualizing a Cubic Linkage through the Use of CAS and DGS. Mathematics, 10(15), 2550. https://doi.org/10.3390/math10152550