1. Introduction
At present, satellite navigation systems have entered a new era of integration with multi-source information carriers, such as positioning, navigation, timing, mobile communication, and broadband Internet. Satellite navigation systems have become an important infrastructure for national defense system and national economic development. The medium Earth orbit (MEO) constellation navigation systems represented by GPS, Beidou, Galileo, and GLONASS have been rapidly developed and fully applied in various fields [
1,
2,
3,
4], and the well-known absolute navigation positioning, relative navigation, and collaborative navigation all depend on MEO constellation navigation systems, especially the currently widely used collaborative navigation.
Collaborative navigation is a key technology for collaborative positioning among formation flight members and has a wide of applications in the fields of fighter formation flying, unmanned aerial vehicle (UAV) swarms, and aerial autonomous refueling [
5,
6]. However, the mission performance and anti-damage capability of a single UAV are limited. Under the background of modern warfare in network-centric warfare (NCW) [
7], the focus of research is gradually transitioning to UAV swarms. Because UAV swarms have the advantages of high survival rate, low cost, and high efficiency, joint navigation and positioning has therefore become one of the key technologies for cluster networking and cooperative air combat.
In recent years, a variety of co-localization techniques have been developed to improve the localization performance of adjacent agents; however, it remains challenging to comprehensively study their performance. At present, the research on cooperative navigation mainly focuses on multi-UAV or unmanned underwater vehicle (UUV) cooperative navigation based on leader-follower or hierarchical [
8,
9], GNSS/INS cooperative navigation based on pseudorange differences, and micro-electro-mechanical system-inertial measurement unit (MEMS-IMU)-based cooperative navigation scheme [
10] and a collaborative positioning architecture based on 3D modeling or terrain assistance [
11,
12]. In view of the gradual formation of inter-aircraft communication and ranging systems, some scholars have proposed a network positioning method that utilizes the mutual ranging of each aircraft in the fleet [
13,
14]. In addition, based on the adaptive artificial potential function, ref. [
15] presents a cooperative navigation algorithm suitable for navigation and control uncertainty. As for the guidance, navigation, and control methods of deep space formation, the corresponding technical reference schemes are also given in references [
16,
17,
18].
With the development of artificial intelligence (AI), smart cities, and future navigation systems and to solve the problems of divergence of formation cooperative navigation accuracy, large amounts of calculation for a fully connected cooperative navigation algorithm and a heavy communication burden have been caused by leader failure in the traditional single leader-follower UAV cooperative navigation. Therefore, it is necessary to find another way and give a low-cost and efficient joint navigation and positioning scheme suitable for the future so as to improve the stability of cluster navigation and the utilization of navigation information. Finally, the formation positioning error is reduced, and the problem of cooperative navigation formation is guaranteed. In recent years, with the emergence of the broadband low Earth orbit (LEO) constellation, a number of typical LEO constellation systems have gradually been applied in various fields, which provides a potential opportunity for modern collaborative navigation and positioning.
In this paper, to solve the problem of low-cost and high-efficiency joint navigation and positioning in the future, we start from the currently “hot” LEO constellation navigation and propose a distributed formation joint network navigation and positioning reference solution. In
Section 2, firstly, we give the specific distributed joint navigation algorithm principle and formation node self-positioning process and then give the construction scheme of the relative navigation information required by the distributed joint navigation and positioning; next, the platform composition and overall architecture of distributed joint navigation and positioning are given; and finally, the ranging and time synchronization problems involved in joint navigation and positioning are given and analyzed. In
Section 3, we establish the specific distributed joint navigation and positioning state model and measurement model; in
Section 4, we configure the designed distributed joint navigation and positioning parameter model and then carry out simulation experiment verification and comparative analysis. In the last section, we give our conclusions and point out the improvement direction of the paper.
2. Distributed Joint Navigation Method
2.1. Principles of Distributed Joint Navigation
By using global navigation satellite system/inertial navigation system (GNSS/INS) combined navigation algorithms or algorithms such as ultra-wide band (UWB) and visual integration, we can obtain relatively accurate position, velocity, and attitude information (typical values are: 0.1 m, 0.01 m/s, and
deg [
19,
20,
21,
22]) of the navigation target. This accurate information can provide a reference source for navigation information in formation flight. Compared with GNSS signals, inter-machine communication is less susceptible to interference, is conducive to the cooperation and control of formation flight, and can also ensure the anti-interference performance of formation and the accuracy of cooperative navigation and positioning [
23].
Considering that the mutual ranging of each aircraft has high requirements on the time synchronization of the ranging system and the real-time performance of the communication system, it is therefore difficult to implement. For this reason, we use the LEO constellation as the navigation framework since, at present, most of the existing broadband LEO satellites, such as the satellites of constellations of SpaceX, oneweb, or Telesat, are essentially communication satellites, and the clock bias between LEO satellite and user terminal can be eliminated by a bidirectional communication method like full duplex (FD). Therefore, when solving the absolute position and relative position of the user terminal, we can use the “duplex” system to eliminate the time synchronization error. In addition, we briefly introduce the time synchronization problem in joint positioning later in the article.
Based on the LEO navigation constellation for the formation of joint navigation, we introduce relative navigation information, that is, relative position information and relative velocity information, which can be obtained by relative sensors, such as laser rangefinders, Doppler velocimeters, and goniometers, and then, a corresponding relative navigation algorithm can be constructed to improve the navigation accuracy and fault tolerance between formations. The members of the formation can obtain high enough absolute position information through GNSS without relying on a reference node with high absolute positioning accuracy. In addition, the formation node can realize the sharing of navigation resources through the data link, and the formation nodes can access and exit at will. This is the idea of the distributed joint navigation and positioning algorithm that we built; the advantages of this distributed formation joint positioning scheme are that it is easy to expand and has high reusability, strong reliability, and high fault tolerance. The construction of relative position information and relative velocity information of formation nodes is described below.
2.2. Self-Positioning Process of Distributed Joint Navigation and Positioning and Construction of Relative Navigation Information
- (1)
Distributed joint navigation and positioning node self-positioning process [
24]:
We call each aircraft in the formation as a formation node, assuming that the formation has a total of
N nodes,
, which is the actual position of node
i;
, is the position of the INS solution output. The detailed schematic diagram is shown in
Figure 1.
Without the aid of an altimeter, the absolute position information of node
i and node
j can be solved by least squares or Kalman filter method through the following equations:
In the same way, with the aid of an altimeter, on the basis of Equations (1) and (2), the absolute position information of node
i and node
j can be obtained by combining the following equations:
where
is the average earth radius;
is the elevation reading of node
I; and
is the elevation reading of node
j. Other parameters can be interpreted by referring to
Figure 1 or reference [
24].
- (2)
Relative Navigation Information Construction of Distributed Joint Navigation and Positioning:
The mutual ranging value
between node
i and node
j can be expressed as:
In the formula, is the real relative position among the formation members i and j; is the ranging error; and ~, is the ranging variance.
The relative angle between node
i and node
j measured by the node
i angle sensor is
where
and
are the measured values of the pitch and azimuth of node
j relative to node
i in the body coordinate system (as shown in
Figure 1);
and
represent the real values of the pitch and azimuth, respectively;
and
represent the angle measurement error of the pitch and azimuth, assuming that they meet the Gaussian white-noise process; that is,
,
,
,
are the corresponding variances.
To correspond to the navigation information, we decompose
along the three directions of the carrier coordinate system:
Assuming that the relative ranging error and angle error are relatively small, according to the infinitesimal equivalent replacement principle, there are
Ignoring higher-order small quantities, we have
It can be obtained from Equations (1)~(5)
where,
,
, and
are the components of the real relative position along the three directions of the body coordinate system; and the specific expressions of
,
, and
are as follows:
Similarly, omitting the redundant derivation process, we can obtain the relative velocity relationship between node
i and node
j as follows:
where
and
have similar meanings to
and
; and other parameters
,
,
, and
are also similar and are not repeated here.
Thus far, the relative position information and relative velocity information have been constructed, and they are the state variables for the subsequent construction of joint navigation and positioning measurement equations.
2.3. Platform Composition and Overall Architecture of Distributed Joint Navigation and Positioning System
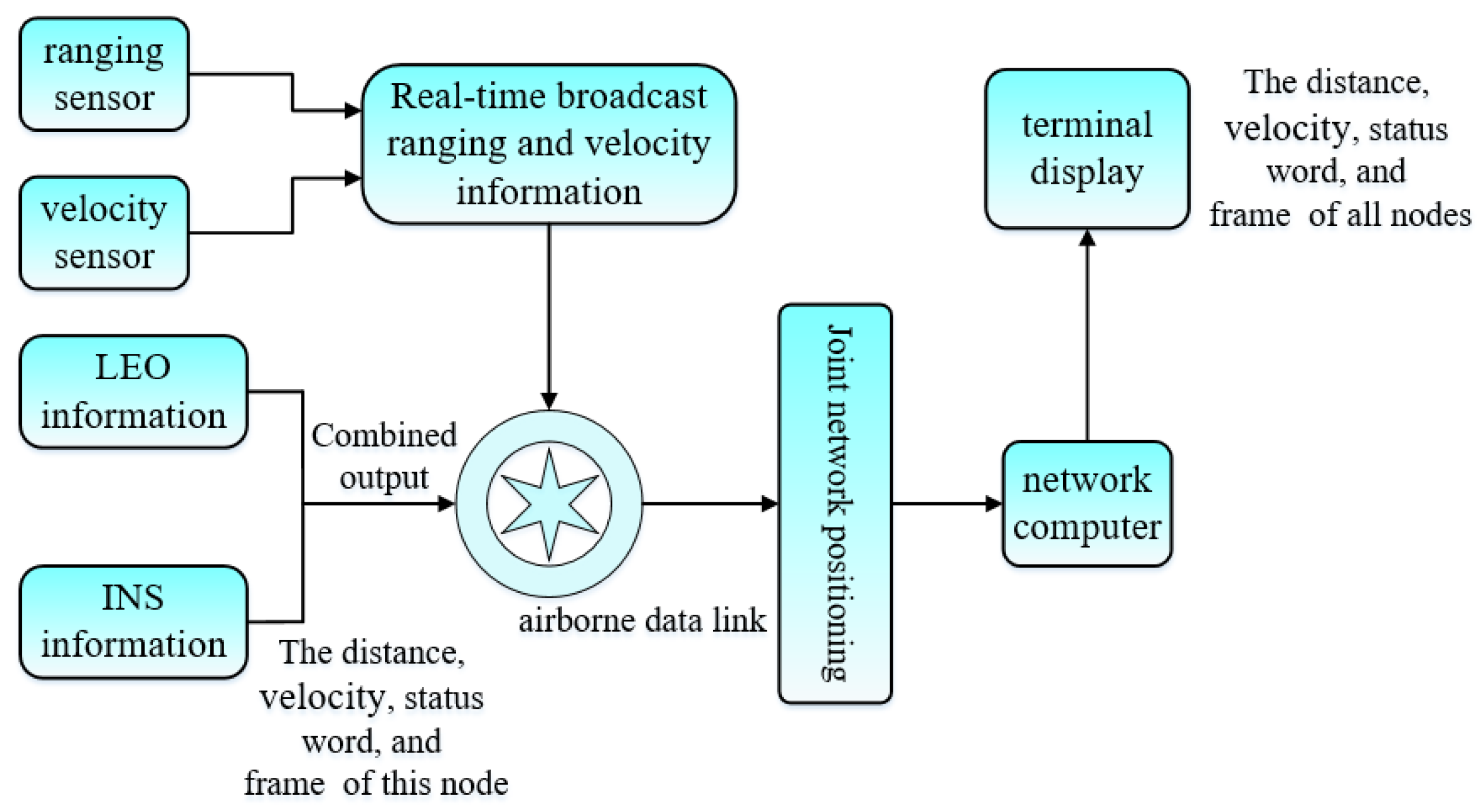
We assume that the joint positioning system of each node consists of a set of airborne data links, INS and ranging/velocity sensors, and a networking computer. In the joint positioning process, the local geographic coordinate system is selected as the navigation system, and the directions of the three axes are north, east, and down, respectively. The LEO and INS data of this node are transmitted to the airborne data link, and the transmitted LEO and INS data include position information and velocity information as well as the status word and frame number; the airborne data link has the functions of real-time ranging and communication; thus, we used laser rangefinders to measure the position
between each node in the formation, and at the same time, communicate the joint navigation ranging and velocity measurement information to each other in real time through radio communication equipment. Finally, the ranging information of all nodes is transmitted to the networking computer for joint positioning calculation. The node joint positioning system framework is shown in
Figure 2.
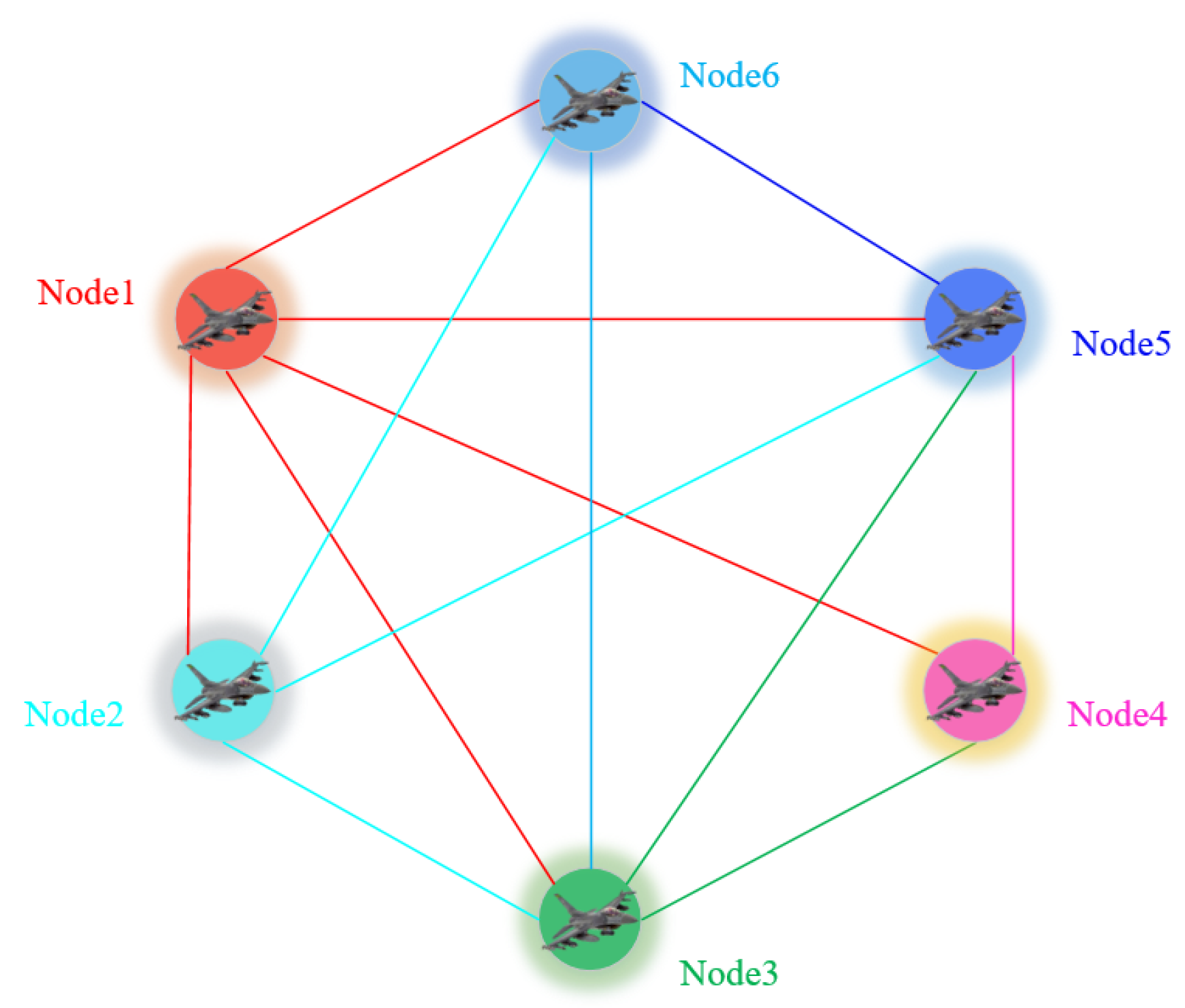
As one of the core devices of the system, the airborne data link is a link device based on data link technology, which can form point-to-point, point-to-multipoint data links and mesh data links and generally has real-time ranging and communication functions [
25]; a distributed non-central mesh data link structure is shown in
Figure 3.
2.4. Ranging and Time Synchronization of Distributed Joint Navigation and Positioning
2.4.1. Ranging Scheme
After the formation aircraft assemble in the designated airspace, according to the time system of each aircraft, the data link of the fleet is powered on and starts ranging at a specified time. There are three commonly used radio ranging methods: one-way ranging method, double-side two-way ranging method, and dual one-way ranging method. The one-way ranging method requires expensive high-precision crystal oscillators [
26], and the double-side two-way ranging equipment is complicated, and it is difficult to measure the distance of multiple machines at the same time. Therefore, the co-positioning system adopts the
t dual one-way ranging method [
27]. The principle is as follows:
The data link device (hereinafter referred to as device
i) equipped with node
i transmits one-way ranging signals and simultaneously receives one-way ranging signals from other devices. Taking the mutual ranging between devices
i and
j as an example, let
be the time synchronization error between the clocks of devices
i and
j;
is the radio signal propagation time between devices
i and
j (usually on the microsecond scale [
28]);
is the signal propagation time measured by device
i; and
is the signal propagation time measured by device
j. Then,
During the ranging process, the working mechanisms of devices
i and
j are exactly the same. Taking device
i as an example: device
i measures
, and at the same time, the receiving device
j transmits
; then, it can be calculated from Equations (14) and (15):
The ranging values for devices
i and
j are
where
c is the velocity of light.
It can be seen that the dual one-way ranging method can calculate the position between nodes, and at the same time, it can also calculate the time synchronization error between the clocks (ns magnitude [
29]) of the airborne data link equipment, which is conducive to the simultaneous ranging of multiple machines.
2.4.2. Time Synchronization
There are the following three time synchronization problems in the joint positioning process of formation node networking:
- (1)
Time synchronization between the onboard data link clocks of each node:
To achieve synchronous mutual ranging, the airborne data link should have a unified time scale, but each airborne data link cannot achieve precise time synchronization when they are turned on, so there is a time bias between their time scales. In the dual one-way ranging method, the time bias between the clocks can be calculated according to Equation (17). With the clock of an airborne data link device as a reference, time synchronization can be achieved by adjusting the clocks of all devices.
- (2)
Time synchronization between the INS of node i and the airborne data link device:
Since the synchronous ranging moment of the airborne data link i is not necessarily the measurement moment of the INS-i, there is a time bias between the airborne data link device i and the INS-i. is a random constant. If the INS has 100 Hz output, assuming that the aircraft velocity is 340 m/s, then the position error caused by within ±1 ms is usually within ±5 m, and this value is negligibly relative to the position error of INS. Therefore, in the process of joint positioning calculation, it can be considered that the clocks between the airborne data link and each INS are completely synchronized.
- (3)
Time synchronization between nodes (including INS) and satellites:
As mentioned in
Section 2.1, since we use the LEO constellation as the navigation framework, and the essence of the LEO satellites is communication satellite, the clock bias between the LEO constellation and the user terminal can be eliminated in a way similar to full duplex. When solving the absolute position and relative position of the user terminal, we can eliminate the time synchronization error by means of the “duplex” system, and we will not consider the variable of clock biases.
5. Algorithm Comparison
In this section, to compare the universality, effectiveness, superiority, and potential superiority of the algorithm horizontally and vertically, we start from three perspectives, that is, using the current LEO constellations with relatively complete deployments, such as SpaceX, OneWeb, and Telesat, to compare and verify the universality and effectiveness of the algorithm horizontally. The vertical comparison between the proposed algorithm and the current four GNSS navigation systems is carried out to verify the superiority of the algorithm. Furthermore, our proposed algorithm is compared with existing advanced algorithms to verify the advantages and potential superiority of our algorithm.
5.1. Comparison of Different LEO Systems
As a horizontal comparison, we use an unbiased altimeter for assistance. The simulation results are shown in
Figure 8 where, as a reference, we use the self-designed algorithm as a comparison to simulate together. The specific parameters of the three constellations SpaceX, OneWeb, and Telesat can be found in reference [
37].
It can be found from the simulation results in
Figure 8 that, on the whole, the three systems give good joint navigation and positioning results although the errors of each system in individual directions may have some fluctuations, which mainly depends on the orbital parameters of each constellation, such as the satellite orbit height, inclination, the distribution of satellites, and the number of satellites in each orbit. However, the final position error and velocity error of each LEO system are convergent, which means that the algorithm we propose is universal, suitable for present most LEO constellations, and can be used as a reference scheme for joint navigation and positioning existing LEO systems and especially as a reference for future integrated communication, navigation (ICN) technology navigation, and positioning technology plans.
5.2. Comparison with MEO Constellation Algorithm
As a vertical comparison, we also used an unbiased altimeter for assistance, and the simulation results are shown in
Figure 9. Similarly, as a reference, we simulated the self-designed algorithms as a comparison. The specific parameters of the four major MEO systems BDS, GPS, Galileo, and GLONSS can be found in reference [
38].
Compared with the simulation results of
Figure 9, our proposed algorithm has greater accuracy advantages in both the position error and the velocity error than the traditional MEO constellation system, especially in the N and E directions. In addition, similar conclusions can be drawn on the final trajectory error curve. This shows that for the future ICN navigation and positioning scheme, MEO-based constellations are not a well-fitting alternative because the main reason for the larger navigation and positioning error of the MEO constellation is that the satellite orbit height is higher than the LEO constellation at the same observation time; as a result, GNSS signal propagation experiences more paths than LEO constellation, and it suffers more serious interference. In addition, if the orbit height is too high, the loss of GNSS signal power will be greater, and the propagation delay will also increase. Therefore, the LEO constellation can be regarded as a considerable option for future ICN technology.
5.3. Comparison with Other Algorithms
To verify the superiority and potential superiority of our proposed algorithm, we compare it with the existing advanced navigation and positioning algorithms. Here, we only take the indicators of Node 1 as an example for comparison. The detailed comparison indicators is shown in
Figure 10 and
Figure 11. In addition, we transformed the ENU coordinate system and the NED coordinate system correspondingly; among them, N/A means that no specific data are given in the original papers.
From the statistical histogram of position error in
Figure 10, our proposed algorithm has certain advantages in terms of mean over algorithm [
40] and algorithm [
24]; in terms of accuracy, our algorithm is comparable to algorithm [
40], but the algorithm [
40] fluctuates greatly in the D direction, and our algorithm is just the opposite. In addition, our algorithm also has certain advantages compared with the algorithm [
39] and the algorithm [
24], and especially compared with the algorithm [
39], the accuracy is improved by one order of magnitude.
From the velocity error statistical histogram in
Figure 11, the algorithm we propose has a great advantage over the algorithm [
40] in terms of mean, and the performance is improved by one order of magnitude; compared with algorithm [
24], although the standard deviation of the algorithm [
24] is relatively good in the D direction, our proposed algorithm also has certain advantages in the mean and standard deviation, especially in the N direction. From the point of view of accuracy, our proposed algorithm has great advantages compared with algorithm [
41], especially in the D direction, as the performance is improved by 95.38%. Compared with algorithm [
40] and algorithm [
24], the performance is roughly the same, but the mean error of our algorithm is smaller, which means that the error fluctuation is smaller, and the algorithm is relatively more stable.
From the above comparison results, our algorithm has certain advantages or potential advantages compared with some advanced transposition positioning algorithms [
24,
39,
40,
41]. For localization performance, in terms of mean and standard deviation, our algorithm is simple in integration and easy to implement in engineering, thereby reducing the corresponding practical application cost. More importantly, our algorithm is oriented to future ICN technology, so it has potentially important application value.
6. Conclusions
In this paper, we take the distributed joint navigation between formation aircraft as the research background and propose a bidirectional distributed joint correction navigation and positioning model that uses relative position information and velocity information to correct the navigation state among formation members. Through the set LEO constellation, the experimental scenario is divided into two scenarios without an altimeter assistance and with an altimeter assistance, with the simulation experiment verifying the effectiveness of the model in a challenging environment. Then, the two scenarios are compared and analyzed, and from the horizontal comparison of the existing main LEO constellations, the universality and effectiveness of the algorithm are strictly verified, and the MEO constellations are compared vertically to verify the superiority of the algorithm. Finally, compared with the existing advanced navigation and positioning algorithms, the superiority and potential superiority of the algorithm are verified.
The experiments show the following:
- (1)
Compared with the traditional leader-fellow collaborative navigation structure that relies on the leader node, our scheme is a distributed collaborative navigation and positioning scheme, which, without the distinction between leader and follower, is a flexible formation collaboration scheme; when performing special tasks, it will gain huge formation reconfiguration advantages;
- (2)
Even without the aid of an altimeter, our algorithm can well suppress the divergence of the pure INS collaborative navigation scheme. With the aid of an altimeter, the collaborative navigation performance is further improved since the altimeter has the advantage of low cost compared with other expensive sensors; thus, it has great practical value;
- (3)
Even if the node baseline interval gradually increases, our algorithm position can converge to zero with or without altimeter assistance, which has a certain robustness and can meet the needs of joint navigation and positioning location services in challenging environments. It is suitable for formation flying and other application scenarios that have high requirements for the accuracy and robustness of moving target cooperative navigation.
In addition, due to our use of a wideband LEO constellation design, with some inherent advantages of the LEO constellation, the accuracy and performance of the algorithm can be further improved compared with the MEO constellation navigation algorithm and some existing advanced schemes. Therefore, our algorithm can be regarded as an ICN reference scheme for future joint navigation and positioning, and the research results can provide reference value for the application of basic joint navigation technology and the application in practical engineering.
Of course, with the increase of the baseline interval, our joint navigation and positioning accuracy is not high enough, and the velocity cannot fully converge in individual directions. At the same time, the clock bias elimination technology in this paper needs to be verified through specific engineering experiments. Finally, it is necessary to further study the basic theory of joint navigation and positioning technology, which can provide theoretical support for solving the above problems.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}