
Containment Control for Discrete-Time Multi-Agent Systems with Nonconvex Control Input and Position Constraints


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Model and Statement
2.1. Preliminaries and Notations
2.2. Description of Model
3. Main Results
3.1. Containment Control Algorithm
3.2. Analysis of Algorithm
- (1)
- Select the value ofsuch thatandfor two constantsand.
- (2)
- Select the values of each nonzeroandsuch thatfor each.
- (1)
- and;
- (2)
- ,,.
- (1)
- As the definition in (7), and , for all and all . It follows thatNote that and , it is obviously that .
- (2)
- Under Assumption 4, and . It can be deduced that . According to the definition of , we have for some constant . In the proof of Lemma 4(1), . Thus, ; also under and Lemma 1, it shows that . □
- (1)
- Let for . Since , we havefor .From Lemma 3, we havefor .Then, we use Lemma 2. It can transform to:for .
- (2)
- Notice that , , and . It follows thatfor .Because , it follows thatfor . □
- When , for . Now, it should be proven that when , for .
- Define for convenience, and it is clear that .
3.3. Analysis of Result
4. A Numerical Example
4.1. Simulation Parament Configuration
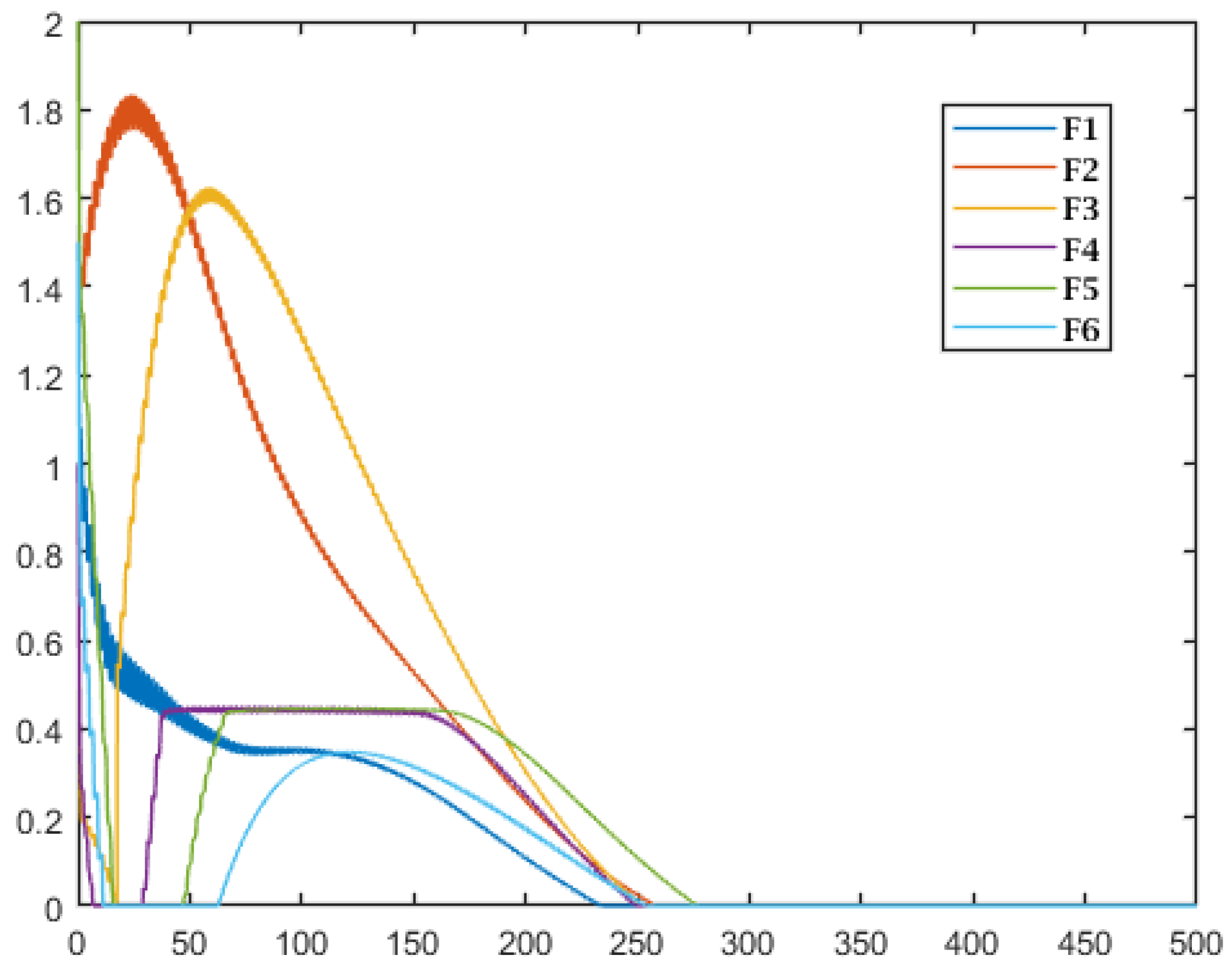
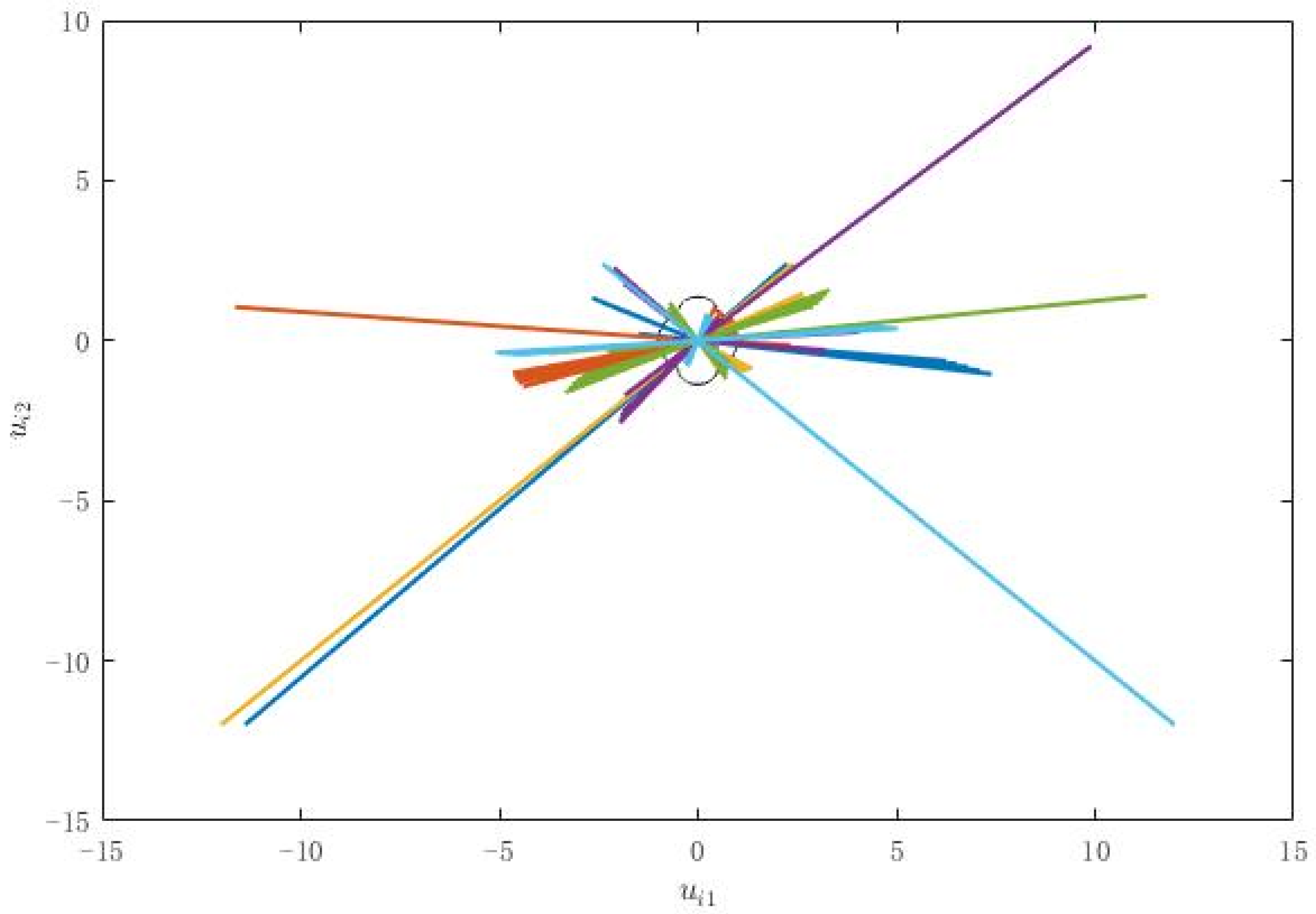
4.2. Simulation Result
4.3. Simulation Comparison
5. Conclusions
- (1)
- The projection operator we introduced can ensure the control input of every follower to lie in a nonconvex set which is useful in practice. It has apparent superiority as compared with other algorithms which can be seen in the simulation.
- (2)
- With the existence of constraints both in control input and position, the system has strong nonlinearity. By model transformation and introducing new error variable, we successfully remove the nonlinearity and achieve containment control.
- (3)
- In the process of analysis, we introduce a geometrical method which uses two similar triangles. This method solves the problem in the proof of effectiveness of our algorithm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ji, M.; Ferrari-Trecate, G.; Egerstedt, M.; Buffa, A. Containment Control in Mobile Networks. IEEE Trans. Autom. Control. 2008, 53, 1972–1975. [Google Scholar] [CrossRef]
- Jiang, Y.; Schmidt, J. Motion of dust ejected from the surface of asteroid (101955) Bennu. Heliyon 2020, 6, e05275. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.; Jiang, Y.; Li, H. Bifurcations of relative equilibrium points during homotopy deformation of asteroids. Celest. Mech. Dyn. Astron. 2021, 133, 42. [Google Scholar] [CrossRef]
- Qiang, L.; Yu, J.; Zhang, Y.; Gao, Y.; Guo, X.; Cui, R.; Wang, S.; Guo, W.; Lv, T.; Cai, L.; et al. Optimal attitude control for solar array orientation. Open Astron. 2021, 30, 73–82. [Google Scholar]
- Zhan, C.; Jiang, Y.; Li, H.; Liu, Y. Dynamics and control of typical orbits around Saturn. Appl. Sci. 2022, 12, 1462. [Google Scholar] [CrossRef]
- Liu, Y.; Jiang, Y.; Li, H. Bifurcations of periodic orbits in the gravitational field of irregular bodies: Applications to Bennu and Steins. Aerospace 2022, 9, 151. [Google Scholar] [CrossRef]
- Li, J.; Ren, W.; Xu, S. Distributed Containment Control with Multiple Dynamic Leaders for Double-Integrator Dynamics Using Only Position Measurements. IEEE Trans. Autom. Control. 2012, 57, 1553–1559. [Google Scholar] [CrossRef]
- Liu, H.; Xie, G.; Wang, L. Necessary and sufficient conditions for containment control of networked multi-agent systems. Automatica 2012, 48, 1415–1422. [Google Scholar] [CrossRef]
- Notarstefano, G.; Egerstedt, M.; Haque, M. Containment in leaderfollower networks with switching communication topologies. Automatica 2011, 47, 1035–1040. [Google Scholar] [CrossRef]
- Su, H.; Jia, G.; Chen, M.Z. Semi-global containment control of multi-agent systems with intermittent input saturation. J. Frankl. Inst. 2015, 352, 3504–3525. [Google Scholar] [CrossRef]
- Xu, C.; Zheng, Y.; Su, H.; Zhang, C.; Chen, M.Z. Necessary and sufficient conditions for distributed containment control of multi-agent systems without velocity measurement. IET Control. Theory Appl. 2014, 8, 1752–1759. [Google Scholar] [CrossRef]
- Wang, X.; Li, S.; Shi, P. Distributed Finite-Time Containment Control for Double-Integrator Multiagent Systems. IEEE Trans. Cybern. 2014, 44, 1518–1528. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Li, W.; Xie, L. Containment control of leader-following multi-agent systems with Markovian switching network topologies and measurement noises. Automatica 2015, 51, 263–267. [Google Scholar]
- Kan, Z.; Shea, J.M.; Dixon, W.E. Leaderfollower containment control over directed random graphs. Automatica 2016, 6, 56–62. [Google Scholar] [CrossRef]
- Su, H.; Chen, M.Z.Q.; Wang, X.; Lam, J. Semiglobal Observer-Based Leader-Following Consensus with Input Saturation. IEEE Trans. Ind. Electron. 2014, 61, 2842–2850. [Google Scholar] [CrossRef]
- Liu, K.; Xie, G.; Wang, L. Containment control for second-order multi-agent systems with time-varying delays. Syst. Control. Lett. 2014, 67, 24–31. [Google Scholar] [CrossRef]
- Song, Q.; Liu, F.; Su, H.; Vasilakos, A.V. Semiglobal and global containment control of multiagent systems with secondorder dynamics and input saturation. Int. J. Robust Nonlinear Control. 2016, 26, 3439–3670. [Google Scholar] [CrossRef]
- Ren, W.; Meng, Z.; You, Z. Distributed finite-time attitude containment control for multiple rigid bodies. Automatica 2010, 46, 2092–2099. [Google Scholar]
- Su, H.; Chen, M.Z.Q. Multi-agent containment control with input saturation on switching topologies. IET Control. Theory Appl. 2015, 9, 399–409. [Google Scholar] [CrossRef]
- Lin, P.; Xu, J.; Ren, W.; Yang, C.; Gui, W. Angle-Based Analysis Approach for Distributed Constrained Optimization. IEEE Trans. Autom. Control. 2021, 66, 5569–5576. [Google Scholar] [CrossRef]
- Lin, P.; Ren, W.; Farrell, J. Distributed Continuous-Time Optimization: Nonuniform Gradient Gains, Finite-Time Convergence, and Convex Constraint Set. IEEE Trans. Autom. Control. 2017, 62, 2239–2253. [Google Scholar] [CrossRef]
- Lian, F.; Chakrabortty, A.; Duel-Hallen, A. Game-Theoretic Multi-Agent Control and Network Cost Allocation Under Communication Constraints. IEEE J. Sel. Areas Commun. 2017, 35, 330–340. [Google Scholar] [CrossRef]
- Delaram, J.; Houshamand, M.; Ashtiani, F.; Valilai, O.F. A utility-based matching mechanism for stable and optimal resource allocation in cloud manufacturing platforms using deferred acceptance algorithm. J. Manuf. Syst. 2021, 60, 569–584. [Google Scholar] [CrossRef]
- Bakolas, E.; Lee, Y. Decentralized game-theoretic control for dynamic task allocation problems for multi-agent systems. In Proceedings of the 2021 American Control Conference (ACC), New Orleans, LA, USA, 25–28 May 2021; pp. 3228–3233. [Google Scholar]
- Fan, W.; Wang, S.; Gu, X.; Zhou, Z.; Zhao, Y.; Huo, W. Evolutionary game analysis on industrial pollution control of local government in China. J. Environ. Manag. 2021, 298, 113499. [Google Scholar] [CrossRef] [PubMed]
- Sathishkumar, M.; Liu, Y.-C. Resilient Memory Event-triggered Consensus Control for Multi-Agent Systems with Aperiodic DoS Attacks. Int. J. Control. Autom. Syst. 2022, 20, 1800–1813. [Google Scholar] [CrossRef]
- Lin, P.; Ren, W.; Yang, C.; Gui, W. Distributed Continuous-Time and Discrete-Time Optimization with Nonuniform Unbounded Convex Constraint Sets and Nonuniform Stepsizes. IEEE Trans. Autom. Control. 2019, 64, 5148–5155. [Google Scholar] [CrossRef]
- Lin, P.; Ren, W.; Yang, C.; Gui, W. Distributed Consensus of Second-Order Multiagent Systems with Nonconvex Velocity and Control Input Constraints. IEEE Trans. Autom. Control. 2018, 63, 1171–1176. [Google Scholar] [CrossRef]
- Lin, P.; Ren, W.; Gao, H. Distributed Velocity-Constrained Consensus of Discrete-Time Multi-Agent Systems with Nonconvex Constraints, Switching Topologies, and Delays. IEEE Trans. Autom. Control. 2017, 62, 5788–5794. [Google Scholar] [CrossRef]
- Yang, C.; Duan, M.; Lin, P.; Ren, W.; Gui, W. Distributed Containment Control of Continuous-Time Multiagent Systems with Nonconvex Control Input Constraints. IEEE Trans. Ind. Electron. 2019, 66, 7927–7934. [Google Scholar] [CrossRef]
- Lin, P.; Li, G.; Huang, K. Position-constrained containment for second-order discrete-time multi-agent systems. Syst. Control. Lett. 2020, 142, 104–109. [Google Scholar] [CrossRef]
- Lin, P.; Ren, W.; Yang, C.; Gui, W. Distributed Optimization with Nonconvex Velocity Constraints, Nonuniform Position Constraints, and Nonuniform Stepsizes. IEEE Trans. Autom. Control. 2019, 64, 2575–2582. [Google Scholar] [CrossRef]
- Facchinei, F.; Pang, J.S. Finite-Dimensional Variational Inequalities and Complementarity Problems; Springer: New York, NY, USA, 2003. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, N.; Yang, Y. Containment Control for Discrete-Time Multi-Agent Systems with Nonconvex Control Input and Position Constraints. Mathematics 2022, 10, 2010. https://doi.org/10.3390/math10122010
Gao N, Yang Y. Containment Control for Discrete-Time Multi-Agent Systems with Nonconvex Control Input and Position Constraints. Mathematics. 2022; 10(12):2010. https://doi.org/10.3390/math10122010
Chicago/Turabian StyleGao, Ning, and Yikang Yang. 2022. "Containment Control for Discrete-Time Multi-Agent Systems with Nonconvex Control Input and Position Constraints" Mathematics 10, no. 12: 2010. https://doi.org/10.3390/math10122010
APA StyleGao, N., & Yang, Y. (2022). Containment Control for Discrete-Time Multi-Agent Systems with Nonconvex Control Input and Position Constraints. Mathematics, 10(12), 2010. https://doi.org/10.3390/math10122010