1. Introduction
In the realm of networking and communication, wireless sensor networks (WSN) play a pivotal role in establishing connections among disparate devices situated at distant locations. Usually, hundreds of wireless sensors share a network to communicate useful information with each other. Therefore, WSNs are becoming crucial, supported by increasing trends of digitalization [
1]. This lays down the cornerstone of the concept of the Internet of Things (IoT), which is considered to be the next step in a digital society, whereby, multi-purpose devices share a networking platform to communicate with each other in a common language [
2,
3]. Throughout a WSN, sensor nodes are continuously transmitting and receiving the information from the base station and are widely used in the secured networks serving military, healthcare, environment monitoring, and smart home systems [
4]. These applications often require localizing the node by determining both the distance and coordinates from a known node or router. The purpose of ascertaining the location of a specific node location is to track the information route while managing and optimizing network latency. Therefore, the unavailability of localization data ends up in the deteriorated performance and control of WSN for a specific application.
In the process of localization, the position of the node with the unknown or consistently changing position (target node) is determined by utilizing the signals from nearby reference nodes, usually referred to as anchors. The localization technique aims to determine the coordinate vectors of the target node. Therefore, the localization technique is carried out in two steps: (i) Estimating the distance of the target node from the reference node; (ii) determining geographical coordinates using the estimated distance and known coordinates of anchors. In WSN, various methods are used to carry out localization including the range-free method and range-based method [
5].
Hop count-based method [
6] and the fingerprint algorithm [
7] are examples of a range-free method. Usually, such methods are cost-effective as they utilize topological information but exhibit low accuracy. They skip the step of distance estimation as an intermediate step and directly determine the coordinates. The method used in [
6] is easy to implement and relatively simple but the localization error increases with the distance. In the fingerprint algorithm, the data are recorded for the predefined and known locations and the unknown locations are estimated offline by matching the measured values with those recorded earlier for the known cases. Two indoor localization algorithms, namely Comparative Received Signal Strength (CRSS) Algorithm and vector algorithm, have been compared in [
7]. The effects of operating frequency, number of access points, and map resolution have been investigated for both cases to conclude the superior performance of vector algorithm as CRSS suffers from ambiguity and needs more access points and higher frequency. A modified version of k-Nearest Neighbor algorithm has been proposed in [
8] which uses the signal matching approach, on a single test case, to claim an increase in the accuracy of signal fingerprint positions.
Range-based methods, on the other hand, estimates the distance between the nodes. Global positioning system (GPS) [
9], time difference of arrival (TDoA) [
10,
11], time of arrival (ToA) [
12], acoustic energy [
13], angle of arrival (AoA) [
14], and received signal strength indicator (RSSI) [
15] are the most common range-based methods used for distance estimation. For the line-of-sight (LoS) applications operating in the outdoors, GPS is the most widely used method despite being expensive, requiring more hardware, and consuming high power. Moreover, such applications are beyond the scope of WSNs under consideration in this study. TDoA-based distance estimation is sensitive to synchronism among the nodes of interest. Moreover, to ensure this synchronism, two signals transmitted at different speeds are required, making it an inefficient method in terms of both energy and cost. Similarly, for ToA, high-resolution clocks are required to determine the exact time of arrival. Moreover, it needs the exact speed of signal propagation. AoA is a directional distance estimation method and therefore, relies on the angle of the antenna receiving the incoming signal, resulting in increased cost of the hardware. In contrast to other methods, RSSI-based localization is independent of the antenna array, synchronization requirements, and any other extra hardware, and hence it is selected to carry out the localization of target nodes in this research work.
The signal strength received at a node depends on multiple factors including the power of the transmitted signal and the path terrain. However, this work will take into consideration the impact of path loss and the distance between two nodes [
16]. The path loss is substantiated by reflection, diffraction, and scattering of the signal [
17]. Moreover, the propagation path also incurs a certain loss in signal strength. RSSI is the measure of signal power received at any node and is measured in dBm. Many factors influence the RSSI [
18,
19,
20] at a certain node including the relative movements of transmitter and/or receiver. It must be noted that even if devices stay static, the motion of objects in the propagation environment may also affect the RSSI at any instant [
21,
22]. The multivariate dependencies of RSSI inhibit the formation of a direct relationship with the distance of the nodes emanating signals. Therefore, an accurate and systematic methodology is required to determine both the distance and coordinates of unknown nodes. The localization of the target nodes is crucial in minimizing network latency by using the optimal path for a data package transfer throughout the network.
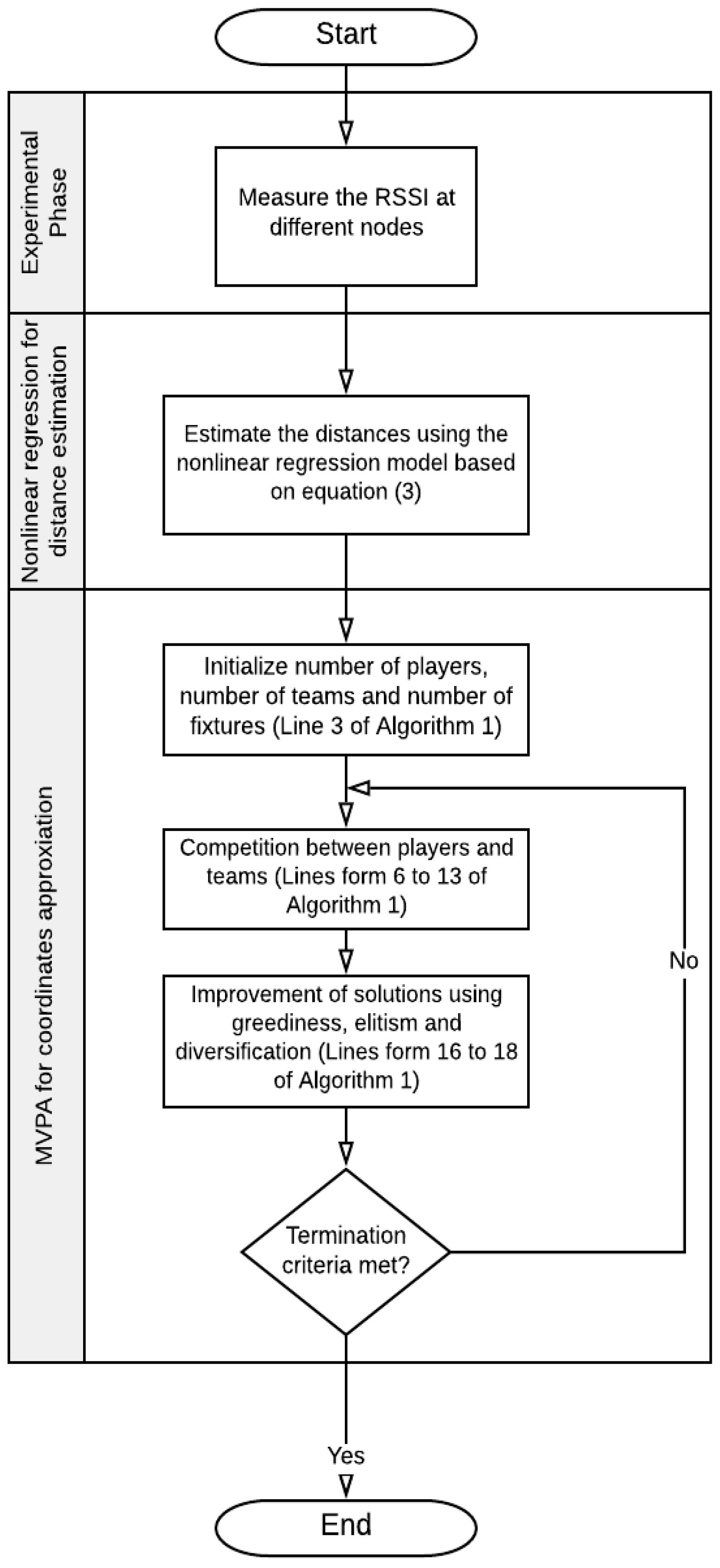
In this paper, a relatively new approach, Most Valuable Player Algorithm (MVPA), is applied to localize a sensor node given only RSSI. MVPA is a sports competition-based optimization algorithm, well-ranked in various benchmarking studies. In the past, it was used in energy-management systems and electromagnetic wave theory. However, despite its superior performance, it has not been used in sensor localization in a WSN so far. This work not only explains the flow of the proposed approach but also opens an avenue for future research of how it may be applied to other similar problems. It applies a two-fold technique to localize the target sensor node. First, the relationship between RSSI and distance from reference to target node is ascertained by developing a nonlinear regression model. In the second stage, MVPA is used to convert the distance data into (x, y) coordinates of a 2-dimensional plane. Four test cases with a different number of nodes reflecting variable network occupancy are studied. The results obtained using MVPA are compared with renowned classical techniques, whereby the proposed approach outperforms other techniques in terms of accuracy and parametric dependence. Mean square error sees a reduction by a factor of 10 for case 3, and case 4 when contrasted with the second-best performing algorithm, reflecting the superiority of MVPA. To demonstrate the improvement on a real-world example, the experimental set-up of [
23] is reused followed by comparative discussion indicating higher coordinate estimation accuracy with MVPA than other contemporary algorithms. The remainder of this paper is organized as follows. The proposed approach is described in
Section 2. The simulation tests along with the experimental study are combined in
Section 3. Finally, conclusions are drawn in
Section 4.
3. Application and Results
To validate the proposed approach both simulation and actual test cases are investigated. Initially, four simulation-based cases are investigated and discussed. Then, the real-time experimental study is presented and discussed. Furthermore, a comparison study is carried out with the established metaheuristic techniques to proclaim the superior performance of the proposed technique. The comparisons are drawn with Biogeography-Based Optimization (BBO), Differential Evolution (DE), Particle Swarm Optimization (PSO), and Genetic Algorithm (GA). The four selected comparing algorithms are among the most well-known optimization metaheuristics. PSO is a population-based stochastic optimization method developed by Eberhart and Kennedy in 1995. It is inspired by the social behavior of bird flocking or fish schooling [
32,
33]. GA is the most famous global optimization method, and it is based on Darwin’s theory about evolution. DE was initially developed by Kenneth V. Price and R. Storn in 1995 while trying to solve the Chebyshev polynomial-fitting problem [
34]. It stems from the genetic annealing algorithm which was also developed by Kenneth V. Price [
35]. The BBO is an optimization algorithm inspired by biogeography [
36].
Furthermore, a fifth optimization algorithm called Sequential Quadratic Programming (SQP) is also used for comparison. SQP is one of the most performant methods for the numerical solution of constrained nonlinear optimization problems. Unlike the other methods used in this paper (i.e., the metaheuristics) which are based on a random search, this method is deterministic and gives always the same results starting from the same point.
3.1. A. Simulation Study
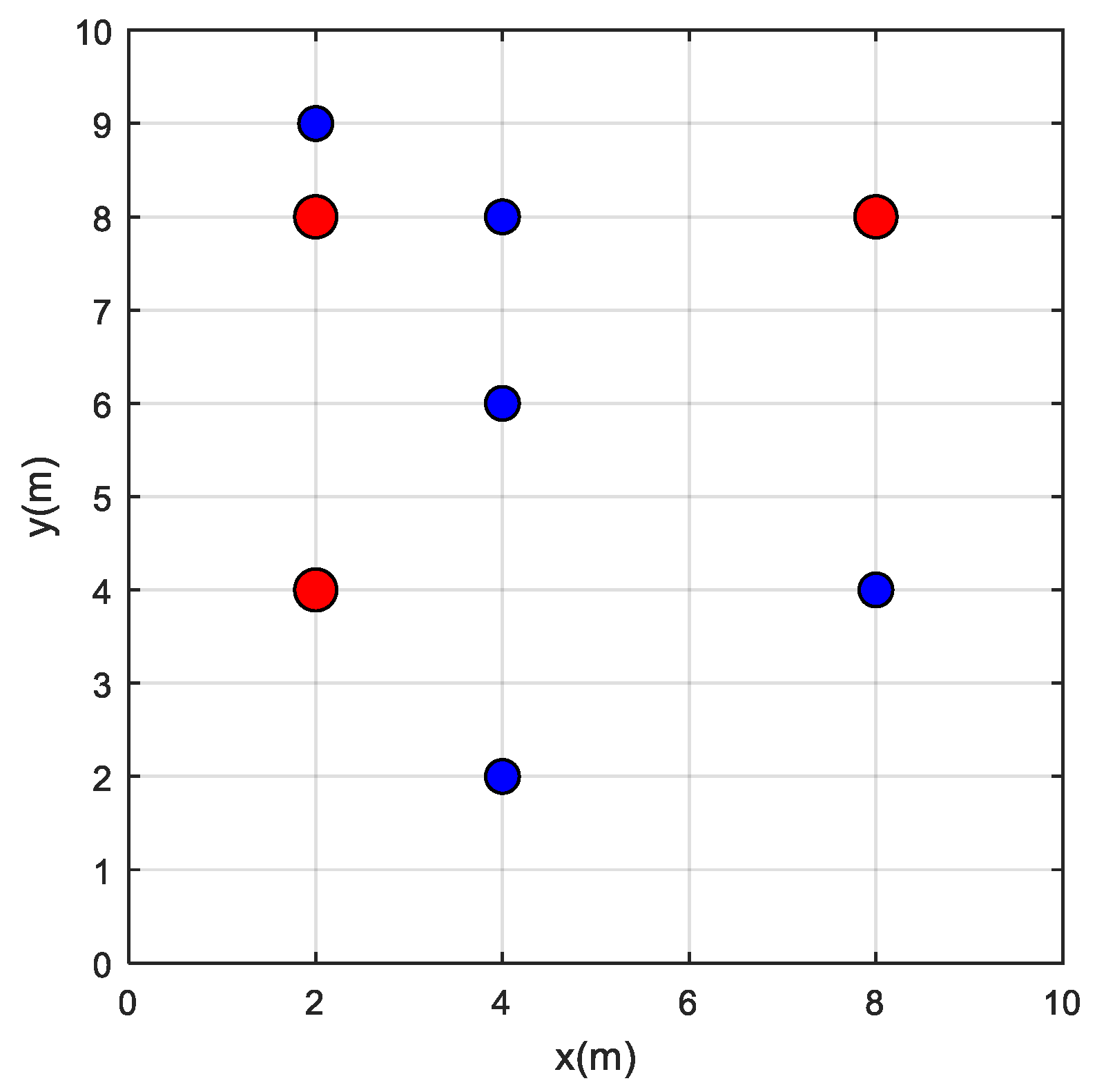
3.1.1. Case 1: Illustrative Case
This first case is an illustrative one used to explain the developed approach rather than to assess its performance.
Let us assume that we have three reference nodes located at (2,4), (8,8), and (2,8) along with five target nodes located at (4,2), (8,4), (4,6), (4,8), and (2,9) as shown in
Figure 2. Using the proposed approach first the distances between reference nodes and target nodes are estimated as follows:
which is numerically given by:
As explained before, in this subsection we assume that these distances are estimated using RSSI.
Then the MVPA solves the optimization problem to calculate
,
,
, and
while minimizing the objective function given by Equation (7). The results (i.e., the coordinates (
) along with the mean squared errors (MSE) obtained using MVPA and the other five algorithms are tabulated in
Table 1. It can be seen from this table that the MVPA along with the SQP were able to calculate the actual coordinates of all target nodes with an accuracy of less than 5 cm (tolerance on estimation error). However, all the remaining algorithms have found some difficulties and made some mistakes to calculate the coordinates of the target nodes as highlighted in soft red in
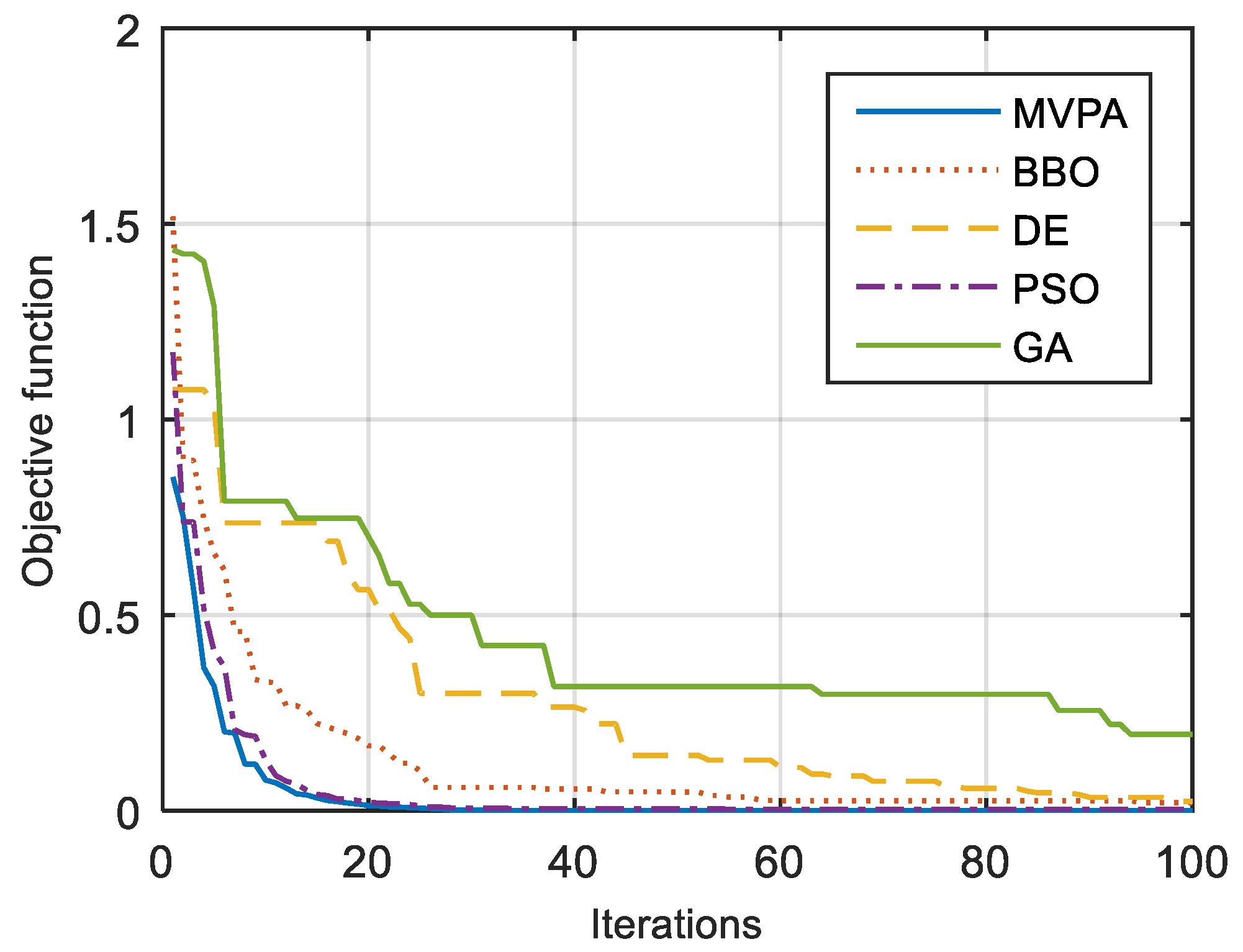
Table 1. The evolution of the objective function is sketched in
Figure 3. It can be seen from this figure that the MVPA has the best convergence among all other algorithms.
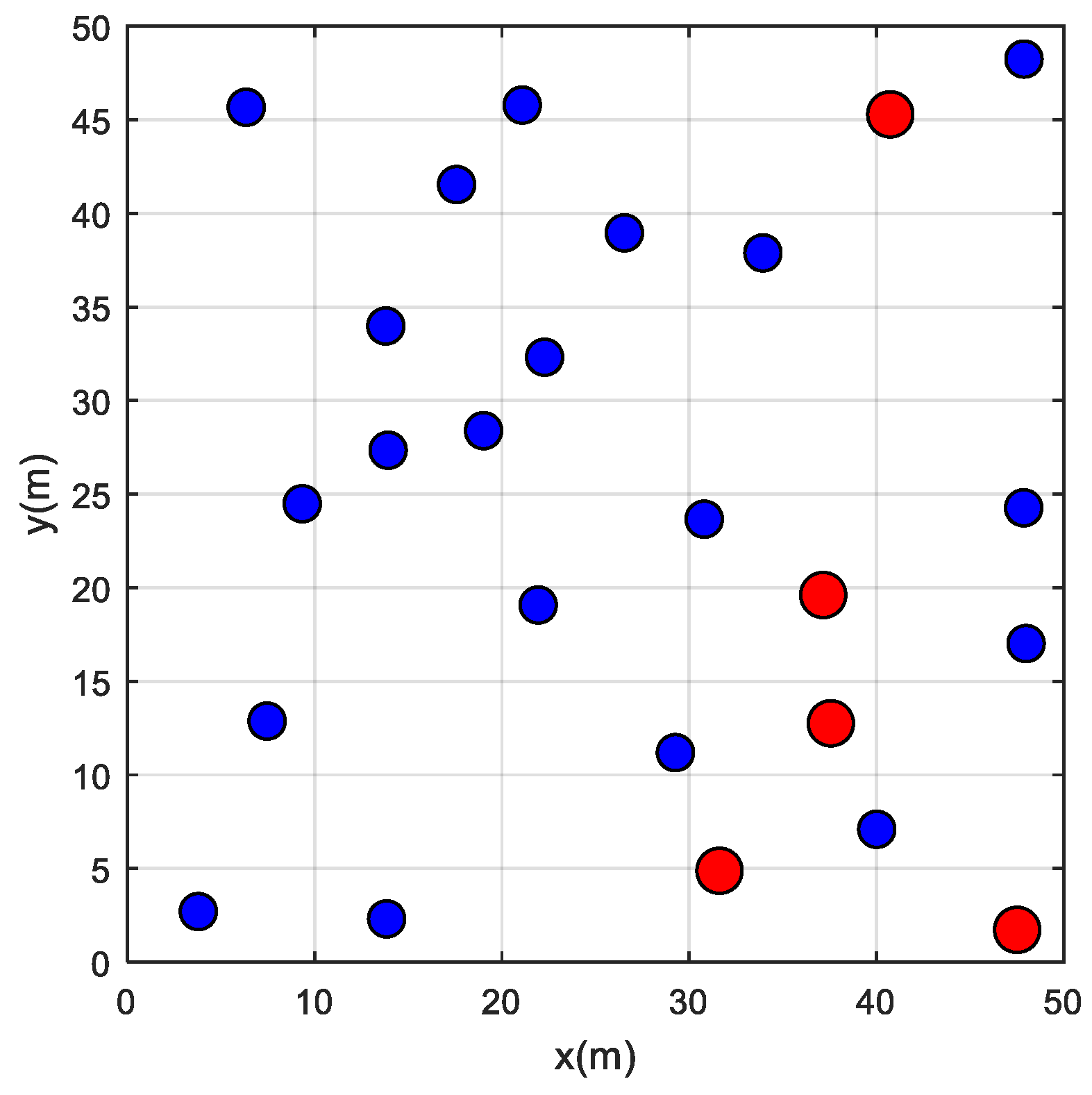
3.1.2. Case 2
In this case, 25 nodes are generated randomly in a given space of 50 m × 50 m among these 25 nodes, 5 nodes are considered as reference nodes (i.e., their location is known and the distances from these nodes to the remaining target nodes are also known). This case is represented in
Figure 4, where red and blue circles represent reference and target nodes, respectively.
The obtained results along with the MSE for this case are tabulated in
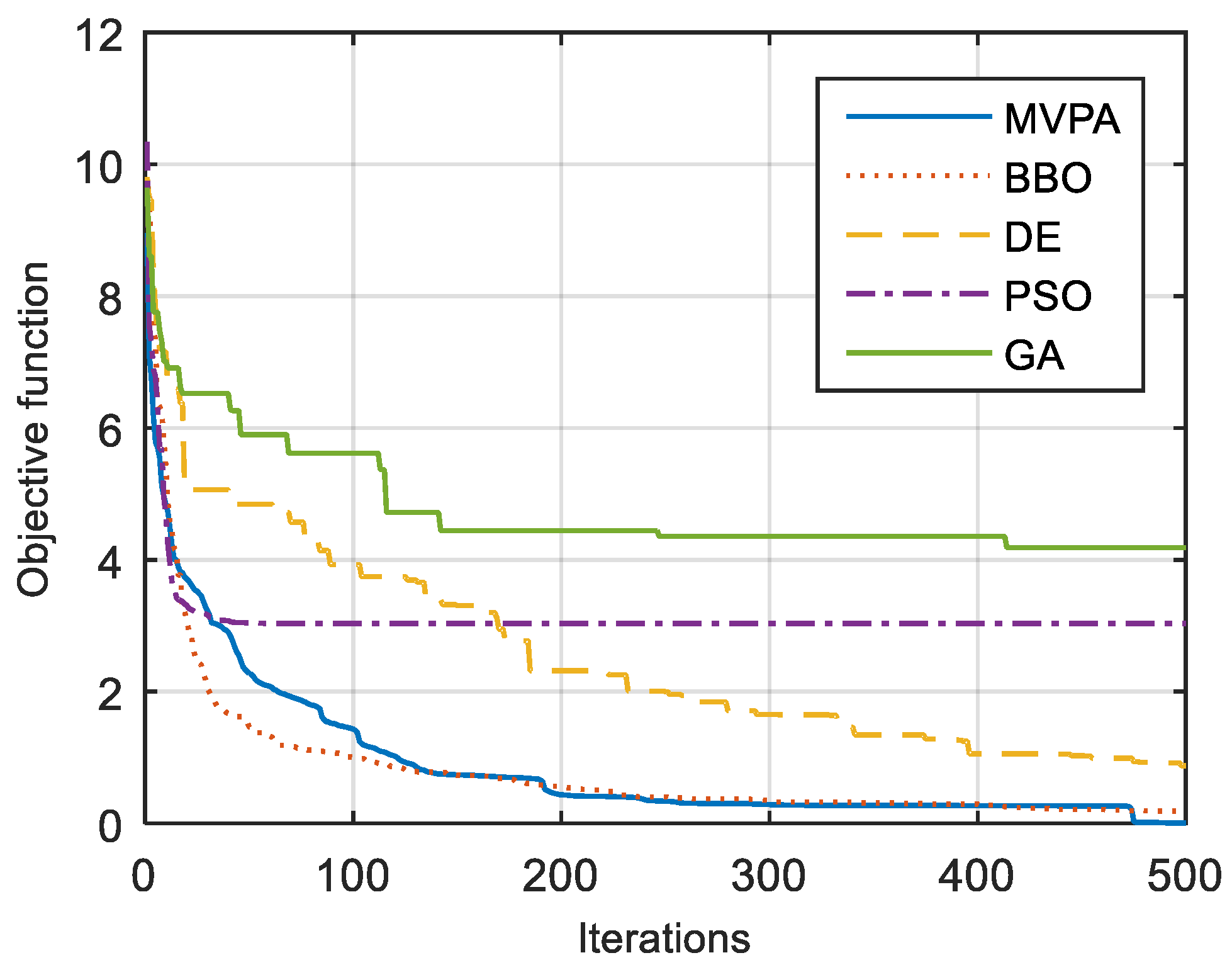
Table 2. From this table, the proposed approach using the MVPA was able to find all the locations of target nodes within a small range compared with the actual coordinates. However, the remaining algorithms have struggled to find the desired locations as highlighted in the table. From the curves plotted in
Figure 5, it can be noticed that the MVPA converges to the lowest value of the objective function.
3.1.3. Case 3
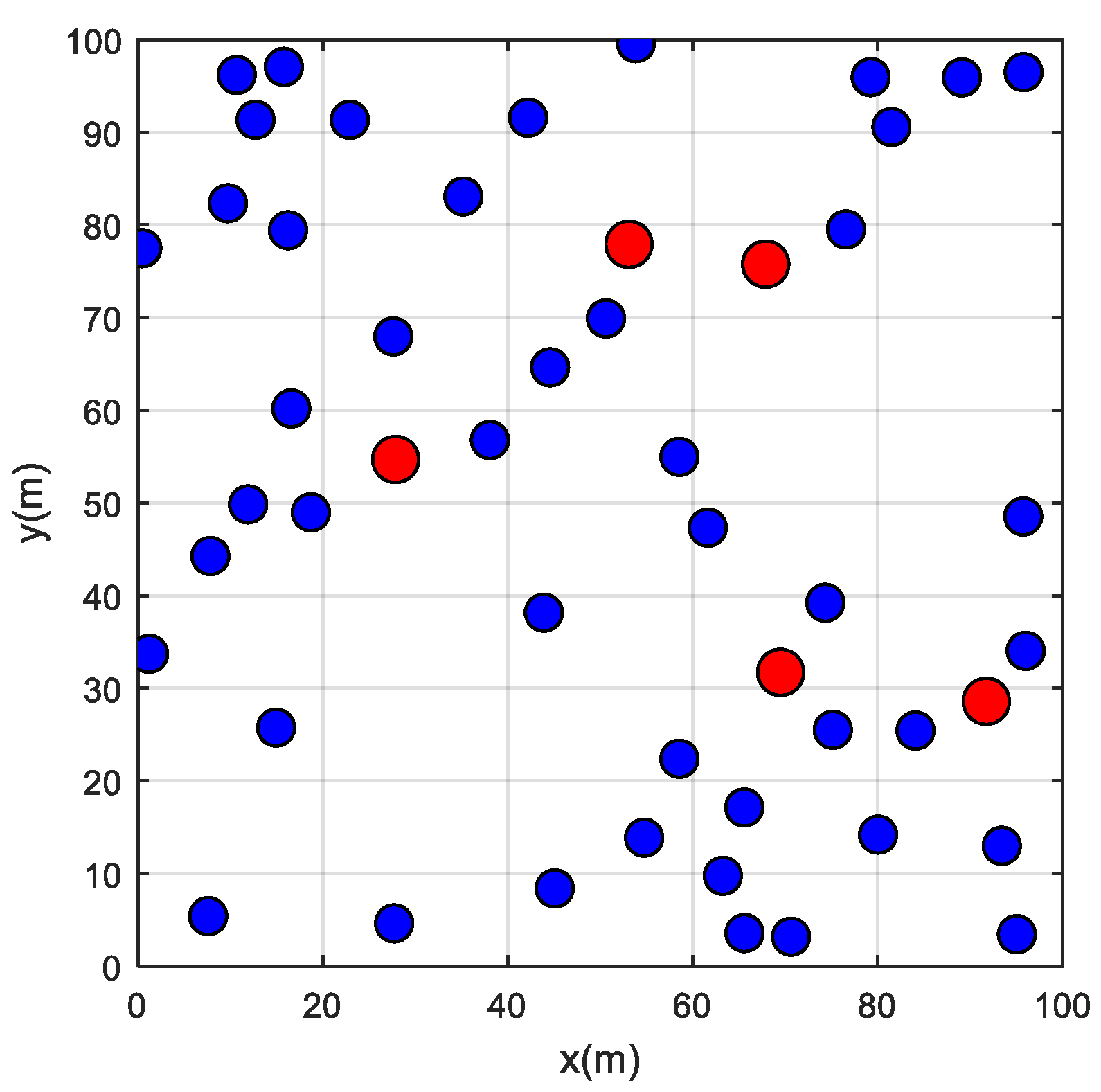
In this case, the number of nodes is increased to 50. Among these nodes, 10 nodes are considered reference nodes. This case is represented in
Figure 6.
The obtained results along with the MSE for this case are tabulated in
Table 3. It can be seen from this table that the MVPA was able to find the coordinates of all target points with good accuracy (less than 5 cm) except for two locations; at the same time, the remaining algorithms have struggled to do so. Moreover, the objective function minimized over the iterations is sketched in
Figure 7.
3.1.4. Case 4
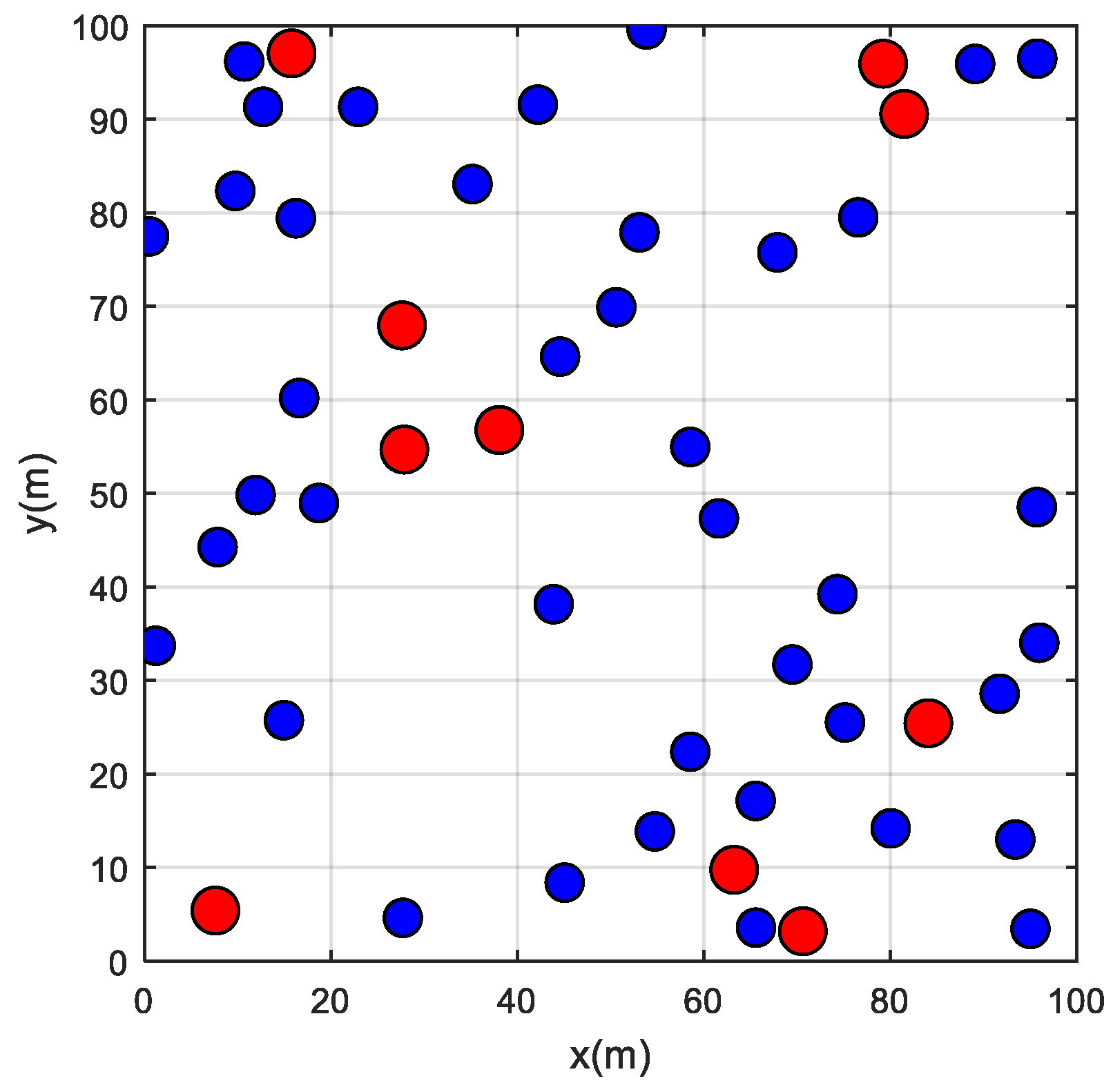
In this case, the number of nodes is 50 nodes in a space of 100 m × 100 m. Among these nodes, 5 nodes only are considered as reference nodes. This case is represented in
Figure 8. Compared to the previous case a smaller number of reference nodes and a wider space are considered here. This will test the efficiency and robustness of the MVPA.
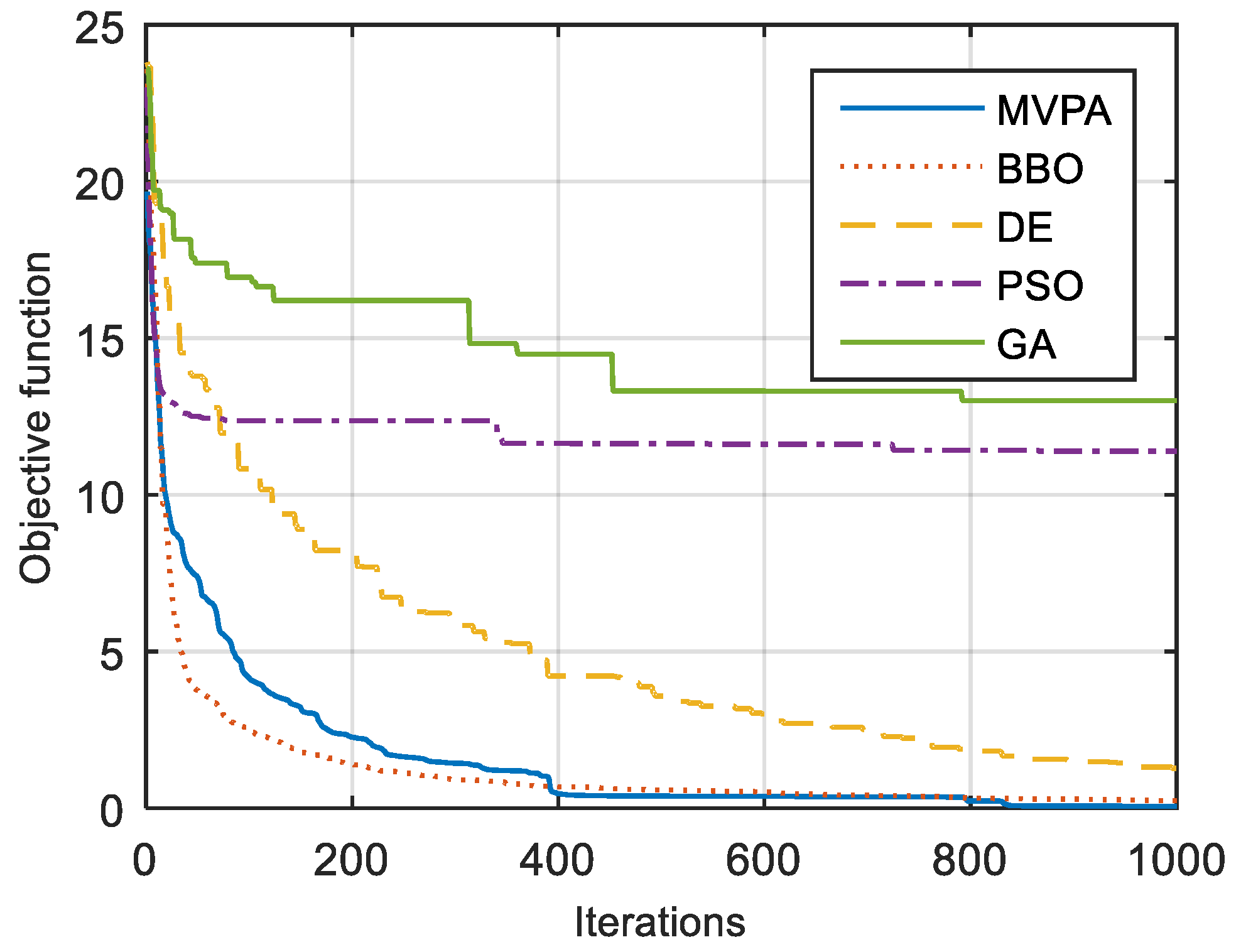
This case, which is the hardest case to solve because of the low number of reference points and the high number of target points, is solved using MVPA and the results are tabulated in
Table 4. It can be seen that the MVPA is by far the best algorithm in estimating the coordinates of target nodes compared to the remaining algorithms. It has estimated five nodes with less accuracy than 5 cm whereas other algorithms have shown low accuracy for most of the cases, or rather have wrongly estimated the location of a few nodes. The curves of the evolution of the objective function are sketched in
Figure 9.
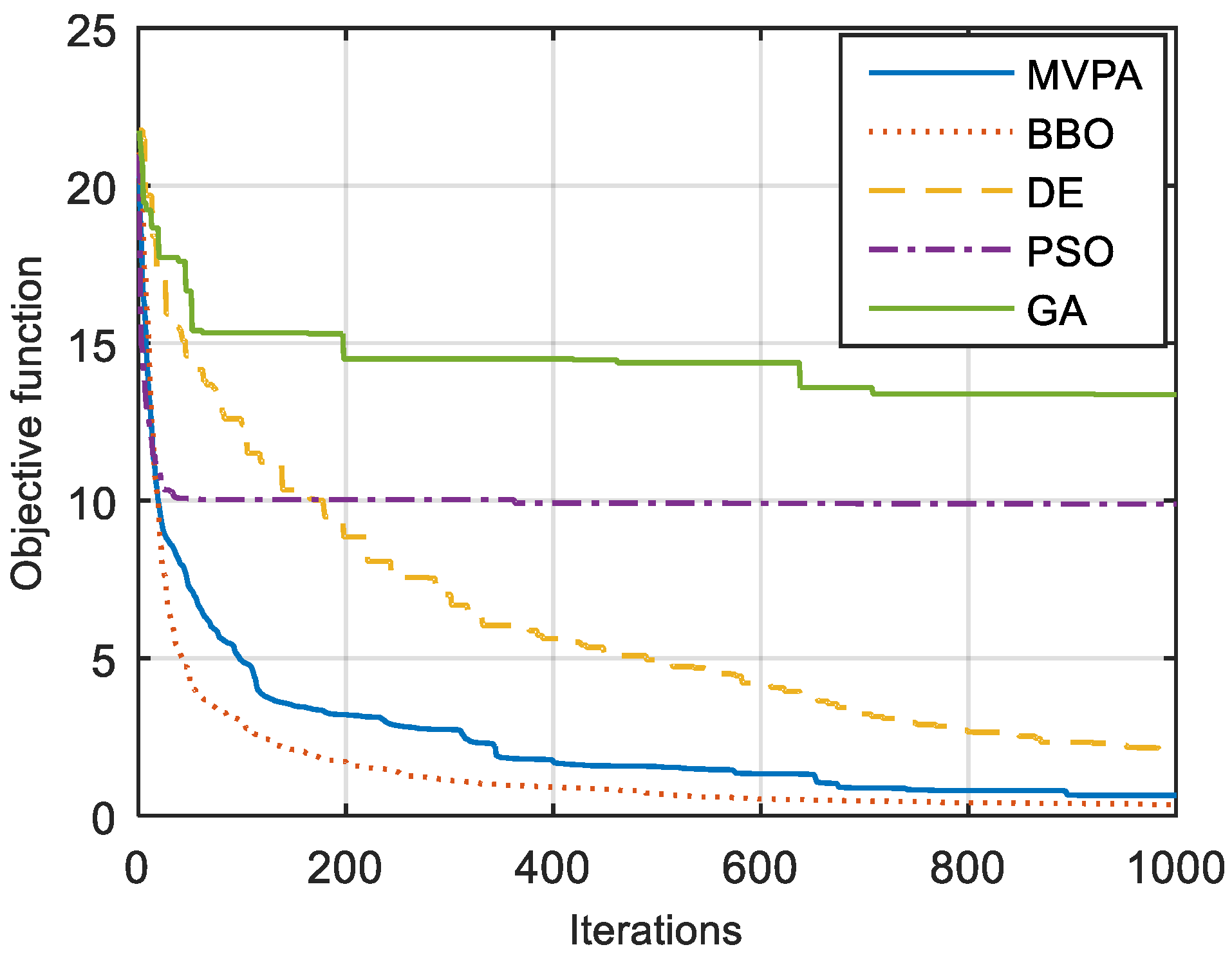
Looking at
Figure 5,
Figure 7 and
Figure 9, it can be noticed that although the BBO has a quick speed of convergence, the MVPA converges to a better final solution. This statement is confirmed by the results tabulated in
Table 1,
Table 2 and
Table 3 where the MSEs obtained using MVPA are lower than the ones obtained using all the comparing algorithms including the BBO in all cases.
3.2. B. Real-Time Experimental Study
In [
23] a real wireless network with three reference nodes and one target node (that can be moved to have multiple measurements) were studied. The target node and reference nodes are created using Zigbee series two modules, that were chosen for being less expensive and power-efficient [
37,
38]. As aforesaid, the reference nodes are acting as three routers whereas the target node acts as a device that receives signals from three transmitting devices (reference nodes) at any instant. A local coordinate system was established such that both x and y coordinates increase by half feet i.e., each integer in the coordinate system is representative of two feet (0.6096 m). The coordinates of the three reference nodes on a local coordinate system are (0,0), (6,0), and (3,8) for both indoor and outdoor settings as shown in [
23].
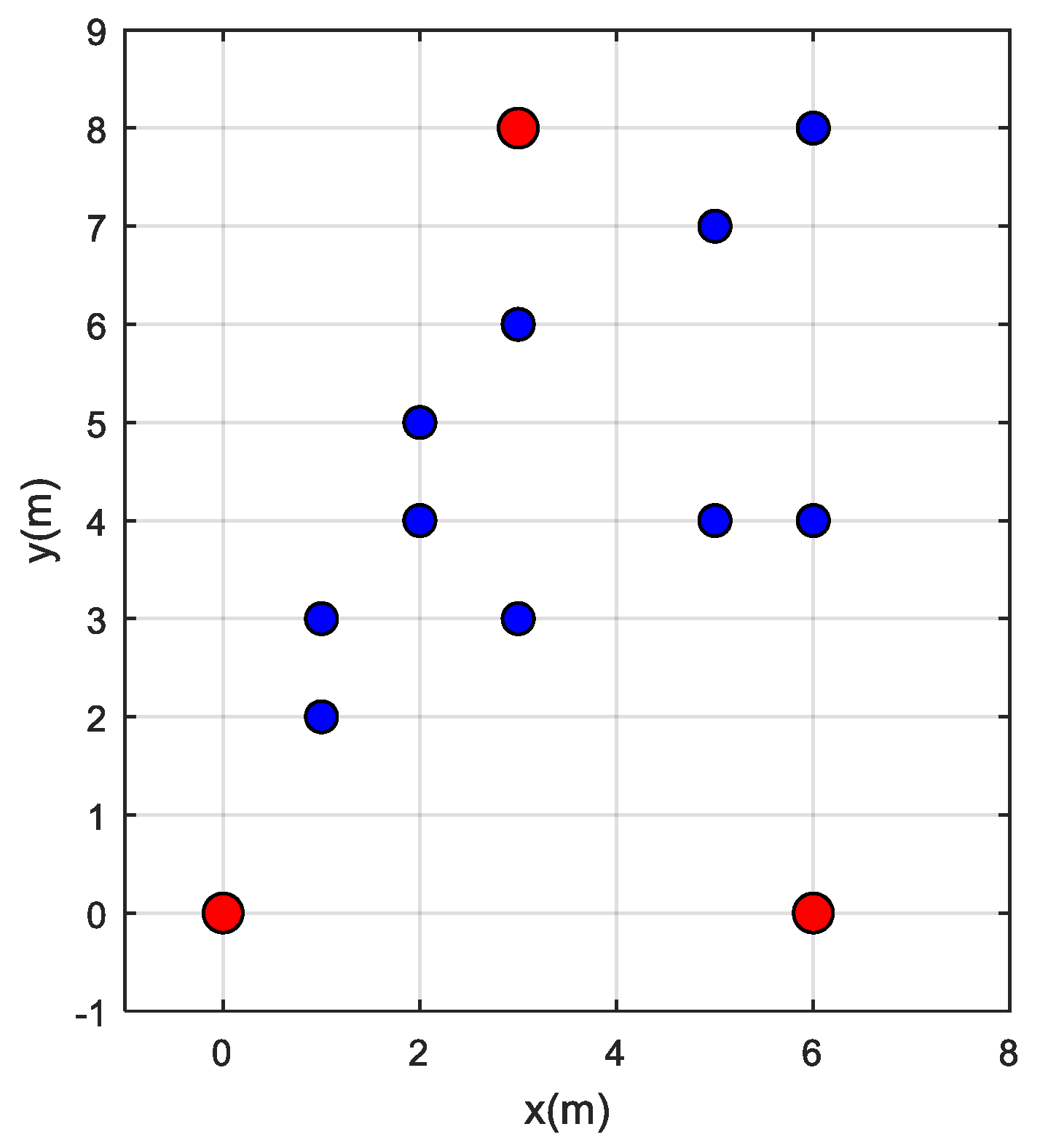
The target node was relocated to ten independent positions as shown by the blue dots in
Figure 10. The coordinates of these nodes along with the distances measured between reference nodes and target nodes, in meters, are tabulated in
Table 5. The last column gives the average of the distances of the target node from all three nodes.
3.2.1. Distance Estimation Based on Measured RSSI
As aforesaid, to determine the coordinates of a real system, first, the distances are estimated from the measured RSSI using a nonlinear regression model and approximating that model on LNSM of Equation (3). Then the proposed MVPA is run to localize the coordinates of the local grid. RSSI is measured for each of the ten locations of the target node using range testing of the XCTU software (XCTU offers a convenient graphical interface where developers can deal with multiple Digi RF modules simultaneously. It is available in several platforms as an open-source application) [
39]. The coordinates of the ten locations where the target node is kept are given in the first column of
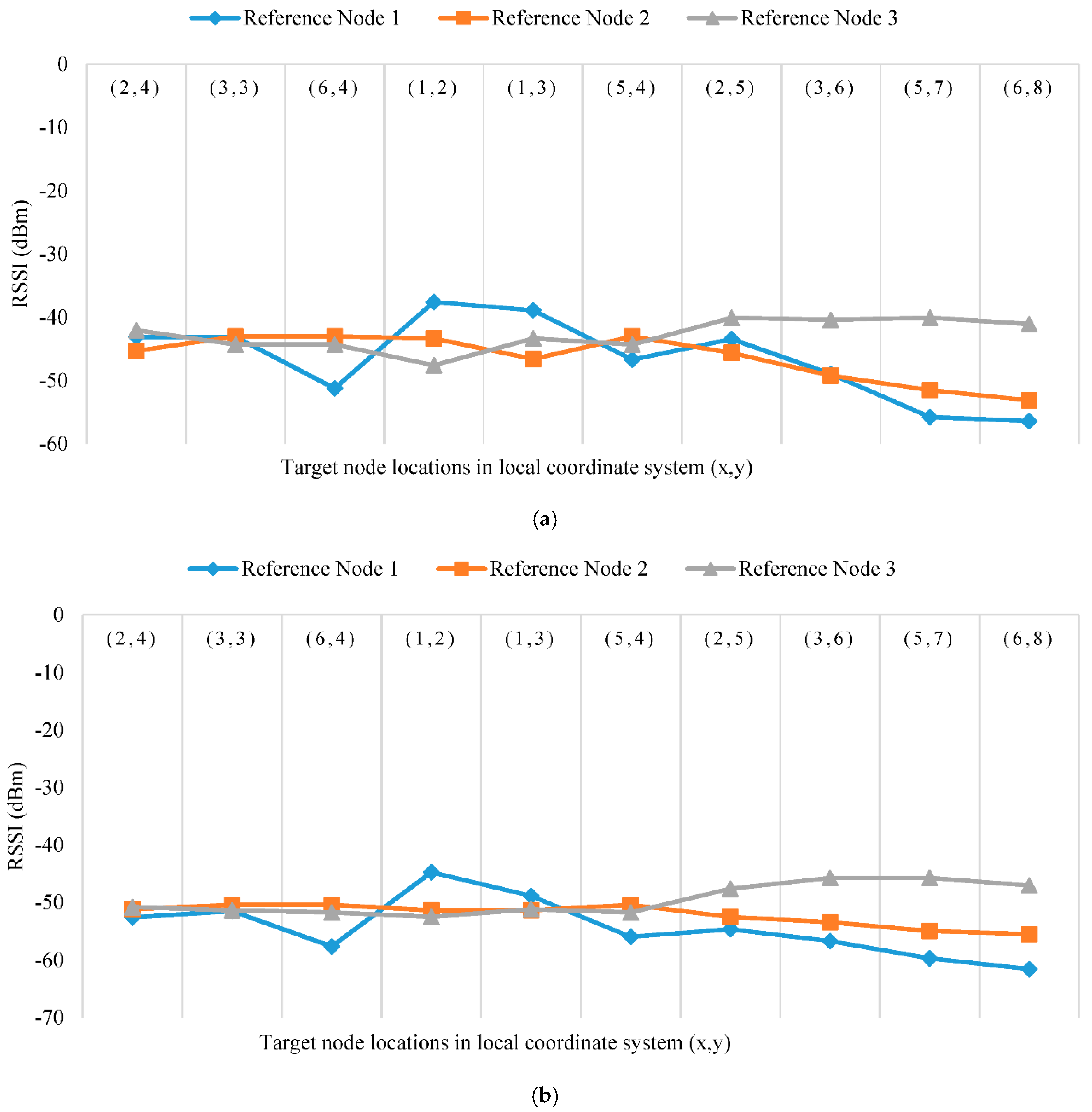
Table 5. At each location, ten values of RSSI are noted and their average RSSI is computed. The average RSSI of each location for both indoor and outdoor settings is shown in
Figure 11. It can be noted that as the target node is moved far away from a specific reference node, the received RSSI is decreased. Moreover, the signal strength observed in the outdoor environment is less than that observed in the indoors. Based on these measurements, a nonlinear regression model is developed to estimate the distances from measured RSSI.
The relationship between RSSI and distance obtained using our nonlinear regression model for indoor experiments is expressed as follows:
and therefore:
The relationship between RSSI and distance obtained using our model for outdoor experiments is expressed as follows:
and therefore:
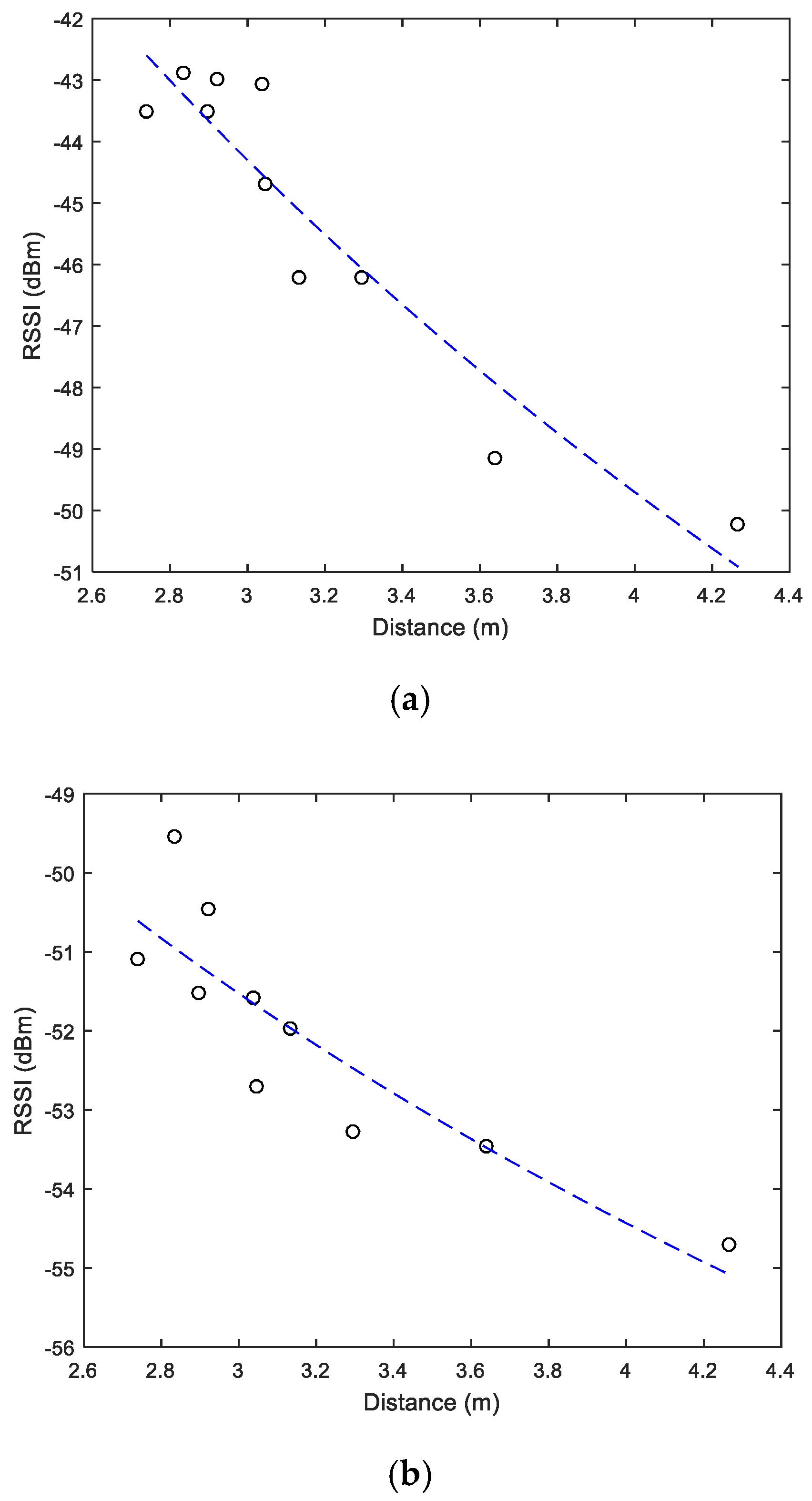
Comparing (10) and (12) with (3) reveals that the terms
is equal to −23.671 (dBm) for the indoor case and −40.425 (dBm) for the outdoor case. However, the value of
can be approximated to −18.78 (dBm) and −10.10 (dBm) for indoor and outdoor scenarios, respectively. Equations (10) and (12) are plotted in
Figure 12a,b, respectively. It can be seen that the nonlinear curves approximate the best function such that the error function between the measured values and the approximated curve is minimized.
3.2.2. Coordinate Estimation Using MVPA
The distances estimated in the previous section for outdoor application are given to the MVPA algorithm to determine the coordinates of the target nodes. The results are displayed in
Table 6. It can be seen from this table that the locations are well estimated, and the error is mainly due to the estimation of the distances from RSSI using the nonlinear regression model.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}