3.1. Shape Optimization and 3D Printing
Recently, we described the use of magnetically moveable scaffold-like architectures to support and transport pH-sensitive hydrogels [
32]. The choice of using a scaffold-like design was motivated by the capability of a porous structure to host a good quantity of hydrogel inside its pores. Retrospectively, however, more optimized shapes were evaluated to increase the quantity of hydrogel loaded. The inspiration for a more suitable design was taken from the so-called honey dipper (
Figure S1), a common household device normally employed to dose highly viscous fluids (e.g., honey). The particular shape of this tool, characterized by the presence of different parallel plates, is optimized to efficiently retain the fluid in which it is immersed. Since the alginate solution is a viscous fluid prior to gelation, the same concept can be transferred to the design of untethered microdevices. Millimetric honey dippers, characterized by the dimensions detailed in
Figure S2, were designed and printed using stereolithography. In analogy with our previous work [
32], dimensional features were kept in the few mm to hundreds μm dimensional range. This is a consequence of the potential use of the devices in the gastrointestinal apparatus, whose tracts present characteristic dimensions compatible with these microdevices. A typical batch of devices was composed of 10 to 15 units and it was successfully printed in a roughly 30 min timespan. Devices were printed exploiting small supports connected to individual printing bases (
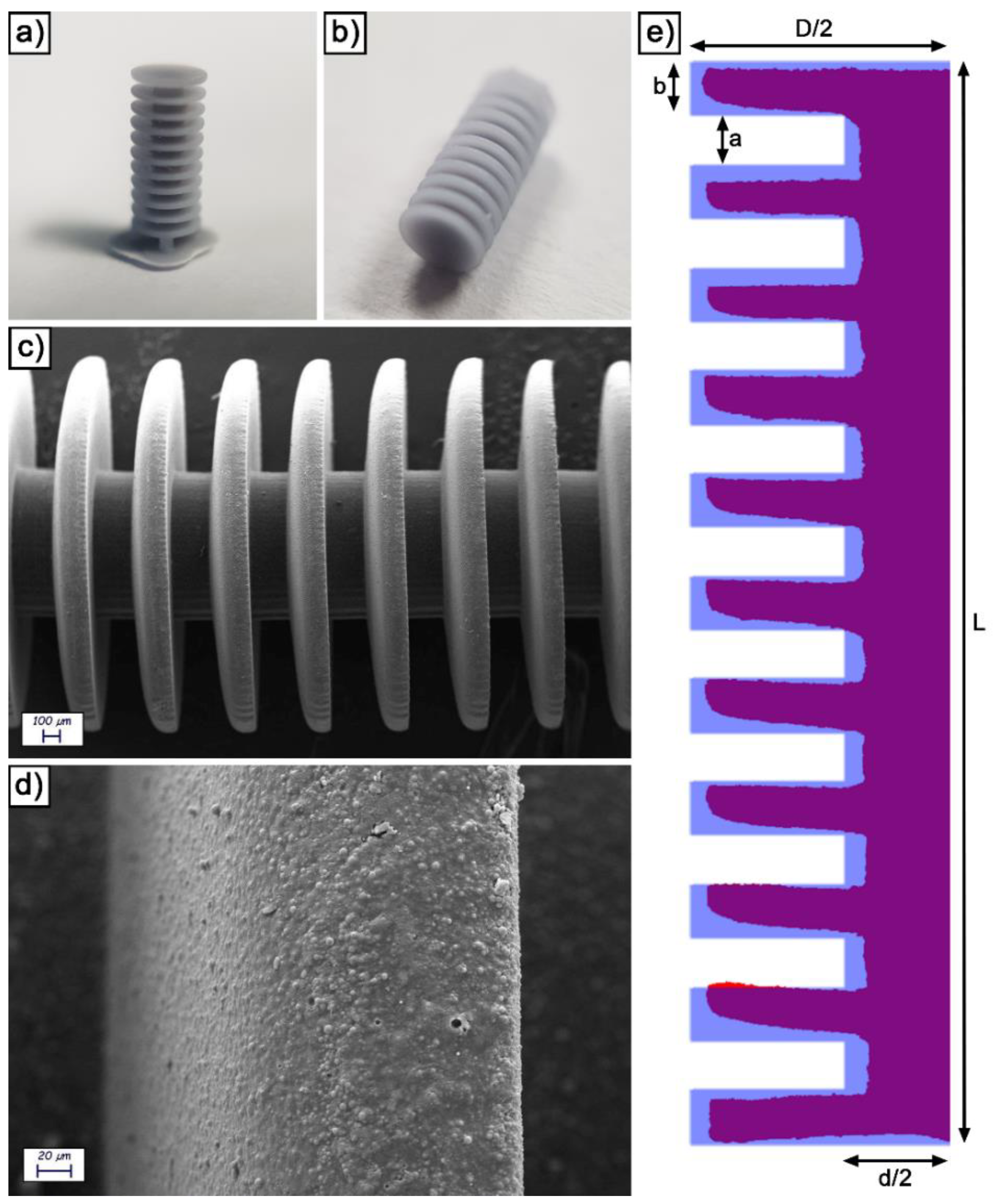
Figure 1a). At the end of the 3D printing step, devices were removed from the supports using a cutter (
Figure 1b).
As-printed devices were characterized from the morphological and dimensional point of view.
Figure 1c is a low-magnification SEM image, in which the general structure of the devices is clearly visible. As expectable from a micrometric SLA printing, the edges are considerably rounded due to the comparatively large laser beam size (22 μm). By increasing the magnification (
Figure 1d), the microstructure of the SLA resin is evident. In particular, it presents a relatively rough surface due to the presence of a silica/aluminate filler inside. The latter is clearly visible in the form of spherical particles by further increasing the magnification (
Figure S3).
To evaluate dimensional conformity to the original 3D model, devices were sectioned and inglobated inside an epoxy resin. The surface was then polished, yielding the result visible in
Figure S4. The profile of the section was then extracted and superimposed to the theoretical one (
Figure 1e). In general, the experimental profile is relatively adherent to the 3D model. The comparison, however, confirms the edge rounding observed at the SEM and allows to quantify the deviation from the ideality (
Table S1). Large features present experimental dimensions relatively adherent to the corresponding theoretical values (98.9% for
L, 95.8% for
D and 84.6% for d). The largest deviations from the ideality were observed on the stacked disks that constitute the body of the device, which are also the smallest features of the design and present the most challenging printing conditions. In detail, the mean thickness of the disks (b) is only 61.3% of the theoretical value, while the distance between them (a) is 140.5% of the theoretical value. Both these dimensions also present a remarkable variability.
3.2. Devices Metallization
After printing, the devices were metallized. Unlike our previous paper on hydrogel-coated microdevices [
32], the different metallic layers were not entirely applied by means of electroless deposition. Electrolytic deposition was used instead, following another previous paper published by our group [
33]. By doing this, metallic layers characterized by more controllable properties and thickness were deposited. The first layer, due to the non-conductive nature of the SLA resin, was obligatorily applied by means of electroless deposition. Consequently, 400 nm of Cu were applied via immersion for 15 min in a formaldehyde-free copper electroless bath. Then, once the surface was conductive, the barrel-plating approach was employed to apply CoNiP and gold from electrolytic plating. This technology, which takes inspiration from the industrial practice used to coat small objects and is extensively described in our previous publication [
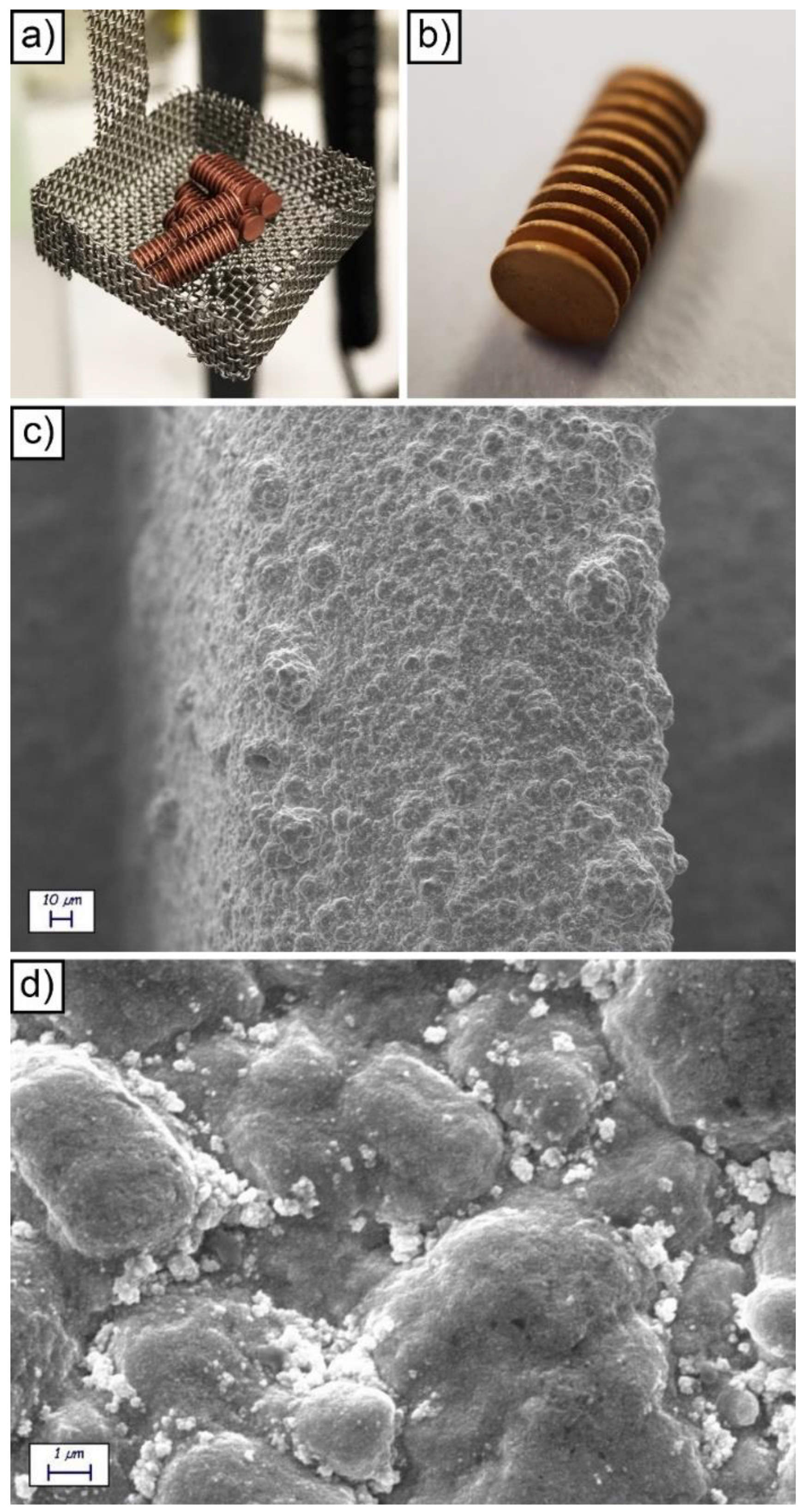
33], allows electrolytic deposition without directly contacting each device. In turn, they are placed inside an electrified metallic basket and plated all together, exploiting the labile electrical connection between the devices and the walls of the basket (
Figure 2a). A total of 5 μm of CoNiP, whose ferromagnetic properties were exploited to make the devices actuable via magnetic fields, were deposited on the microrobots in 160 min.
With regard to the barrel plating approach, we observed in our previous work [
33] that the non-ideal contact between the devices and the basket requires the introduction of a correction coefficient (named ψ) in the standard well-known Faraday law Equation (1). The relationship describes the amount of material deposited with respect to the total charge used.
m is the total mass reduced,
M is the molar mass,
q is the total charge,
Z is the valence of the ions reduced,
F is the Faraday constant,
η is the cathodic efficiency of the reaction.
ψ, as previously stated, is an apparent efficiency of the barrel process, which must be determined by comparing the amount of metal deposited in the barrel and the corresponding amount plated in analogous conditions on a standard planar surface with ideal electrical connection to the generator.
η and
ψ for CoNiP deposition were determined previously [
33] and they resulted equal to 0.42 and 0.25, respectively. In other words, only 10.5% of the current in the barrel is used to actually plate CoNiP on the devices. However, this apparent disadvantage of the barrel-plating approach is counterbalanced by the possibility to plate layers on small objects using electrolytic deposition and without leaving uncoated areas due to electrical contacting.
At the end of the CoNiP plating step, the microdevices were coated with a 4-μm thick gold top layer to make the surface biocompatible and to avoid corrosion. Such a layer was again deposited using the barrel approach in a non-cyanide gold-plating bath. With respect to the galvanic displacement methodology previously employed to apply gold [
22], electrolytic deposition allows to deposit thick layers (in the few μm range). Increasing the gold thickness renders the devices more resistant to corrosion, thus increasing the number of reuse cycles. Barrel gold deposition was carried out here for the first time and, for this reason,
η and
ψ were determined.
η of the deposition process was evaluated depositing gold on a planar copper substrate and the result was equal to 0.57.
ψ was evaluated by weighing the devices before and after deposition in the barrel, considering the cathodic efficiency previously calculated and comparing the result with the mass deposited on the planar copper sample. The correction coefficient
ψ resulted equal to 0.28. Gold was deposited for 220 min to obtain the thickness required.
The final visual appearance of a gold-coated device is visible in
Figure 2b. The surface appears uniformly covered with gold, as further certified by the SEM analysis (
Figure 2c,d and
Figure S5) and by the EDS characterization (
Figure S6). As expected, the application of a metallic layer on the surface of the devices increased the roughness of the surface from 191 ± 23 nm (R
a for the surface of the uncoated resin) to 356 ± 55 nm (R
a for the surface Cu/CoNiP/Au coated devices). SEM analysis evidenced a nodular morphology on the surface of the devices, which was a result of the electrolytic deposition process employed for their metallization.
3.3. Hydrogels Application
At the end of the metallization process, microdevices were coated with alginate and the effect of the three different physical cross-linkers was examined. Considering the results obtained in different papers [
37], the concentration of sodium alginate was fixed at 2%
w/
v in distilled water. Too high alginate concentrations lead to stiff hydrogels, which show higher rigidity but lower swelling abilities, thus compromising the drug loading capacity and its utilization inside the human body. Furthermore, the solutions with higher concentration are too viscous with a very long time of complete dissolution, and do not facilitate the deposition of the hydrogel on the device. Indeed, by increasing the alginate concentration, there are more polar groups (-COO-) interacting with divalent ions of the cross-linker agent, increasing the cross-linking density [
38]. The crosslinking process keeps the chains closer to each other, increasing the mechanical properties of the devices but reducing their water and drug uptake. Lower concentrations produce, instead, a hydrogel with an excessive swelling degree, thus decreasing the adhesion to the substrate, increasing the volume and having inconsistent shapes with the magnetic actuation. Therefore, the final choice resulted from a balance between the swelling degree and the adhesion and consistency of the hydrogel over the scaffold.
In the present work, only the type of cross-linker was varied to evidence its effect on release properties. In general, alginate has the ability to form a 3D hydrogel network when in contact with divalent cations (such as Ca
2+, Fe
2+, Mn
2+, Ba
2+, Sr
2+). Here, in analogy with Da Silva et al. [
34], three different biocompatible cross-linker agents have been tested: MnCl
2, ZnCl
2 and CaCl
2. The relative stoichiometry of the crosslinker was kept constant at a value of 1%
w/
v, which has been reported in many works as optimal from the swelling, uniformity and stability point of view [
34,
37,
38]. Indeed, hydrogels should remain attached over the scaffolds, without collapsing, with a thickness as uniform as possible, and they must permit a good uptake of water to guarantee a sufficient loading of drug molecules. Low cross-linker concentration means a lower diffusion gradient that leads to low rates and low degrees of crosslinking. This implies a very high swelling degree, excessive volume and poor homogeneity. On the contrary, excessive cross-linking can reduce the soft nature of the system needed for applications with living tissue. Lastly, higher concentrations of the crosslinking agent favor its diffusion among alginate chains and determine a faster crosslinking process.
Devices were suspended to a thin wire and sequentially immersed in the alginate solution and then in the crosslinking solution (
Figure S7). To sustain the wire, a self-designed holder (
Figure S8) was employed. In line with our previous work [
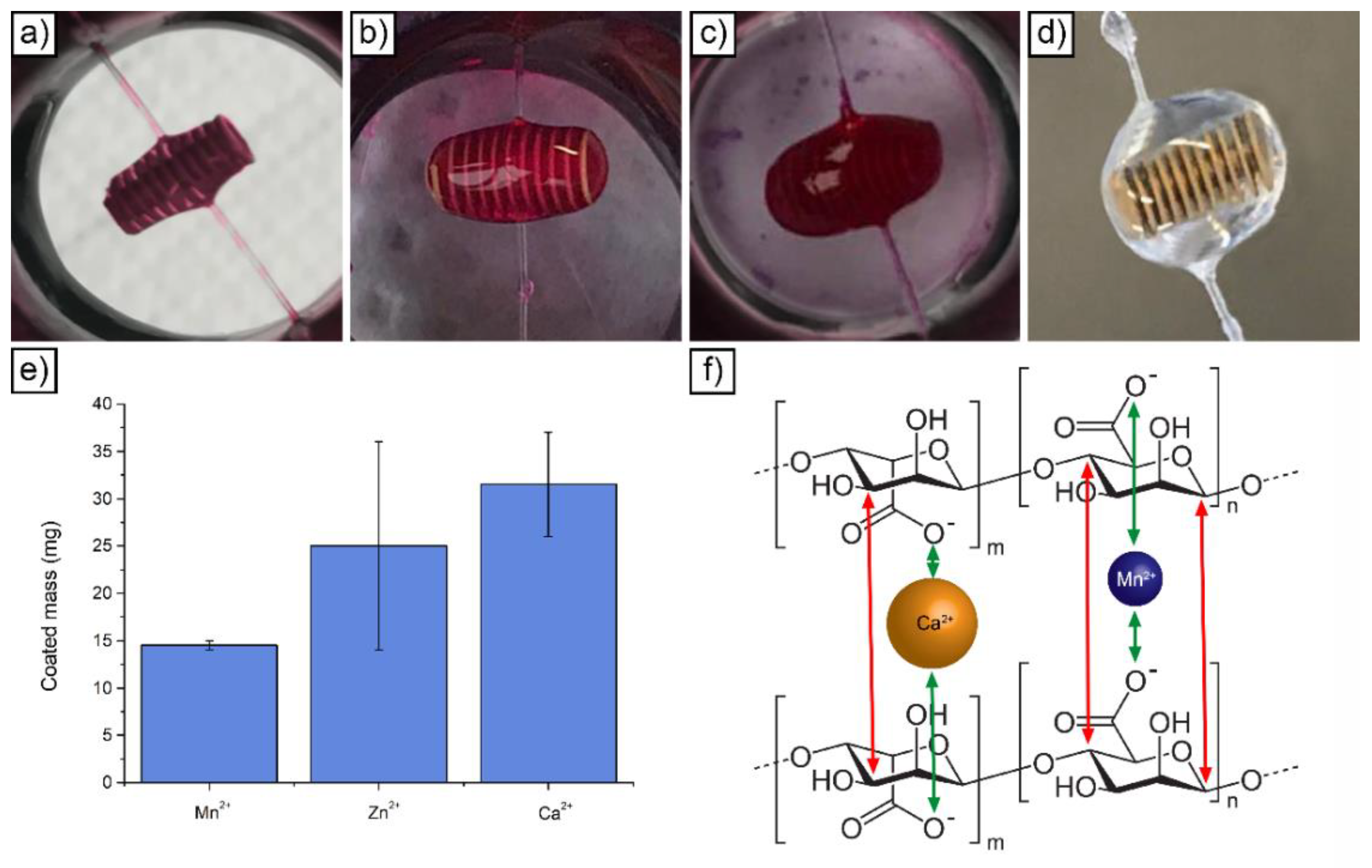
32], the total thickness of the hydrogel layer could be increased by repeating the coating sequence. However, as evidenced in
Figure 3a–d for the Ca
2+ reticulated alginate, the application of more than one layer progressively altered the shape of the devices. With one layer (
Figure 3a) and two layers (
Figure 3b), the shape of the devices remained relatively cylindrical. At three (
Figure 3c) and four (
Figure 3d) layers, the final shapes of the devices were strongly rounded by the surface tension of the non-reticulated hydrogel. The ellipsoidal shape resulting from more than two coating sequences could potentially interfere with device actuation, which was designed for cylindrical-shaped devices. For this reason, the number of hydrogel layers was limited to a maximum of two, ideally one. With this consideration, it is fundamental to load the highest possible amount of hydrogel to maximize the amount of loadable drug. The shape of the device has a strong influence on this aspect, as demonstrated by calculating the weight difference between uncoated and single layer coated devices. Hydrogel uncoated devices were characterized by a weight of 31.46 ± 1.78 mg. Considering Ca
2+ as a crosslinker, the final weight of the loaded hydrogel was 31.5 ± 5.5 mg. This translated into a 100.13% increase of the weight after coating. If compared with the increase registered in our previous work [
32] with porous microdevices (80%), this value demonstrates that the honey dipper design is able to optimize hydrogel loading after a single coating step. Besides the device shape, the crosslinker employed also influenced the final loaded weight. Indeed,
Figure 3e depicts the weight increase recorded in the case of alginate applied on the microdevices and reticulated with Ca, Zn and Mn. A clear influence of the reticulating agent can be observed, with Mn allowing the lowest amount of loaded hydrogel (14 ± 0.5 mg).
From the results obtained by Da Silva et al., it was possible to see that the hydrogel prepared with Mn
2+ had a higher swelling degree if compared to those prepared with Zn
2+ or Ca
2+. As the three cross-linkers have the same valence (
2+), the swelling variation can only be attributed to the different size of the ions—0.067, 0.074 and 0.100 nm for Mn, Zn and Ca, respectively. Ions with a larger radius have a higher interaction with the groups -COO- of sodium alginate, thus generating chains with higher entanglement (
Figure 3f). The stronger interactions of the larger ions with the polymeric chain may be related to the polarizability and London dispersion forces. Larger molecules, atoms or ions usually exhibit higher London dispersion forces and are also more polarizable, thus increasing ion-dipole interactions with the polymer chain. These interactions minimize the elasticity of the polymeric chain, reducing its swelling degree. In addition, as is evident from
Figure 3f, larger ions occupy a larger space in the empty interstices among the polymer chains (or pores), decreasing the virtual volume which could be occupied by water molecules. Therefore, due to their size, calcium ions are more efficient (in the same volume) in the polymeric chain entanglement, also providing more intermolecular interactions and limiting the expansion of the polymeric chain [
34]. On the contrary, Mn
2+ ions, due to the lowest ionic radius compared to the others, present a weak interaction with the -COO- groups of the alginate. This fact limits the effective crosslinking but improves the water absorption rate. This leads to less rigid hydrogels with polymer chains relatively free to move.
From these considerations, it can be inferred that for the affinity of the ions with -COO- groups, the best crosslinkers, in order, are: Ca
2+ > Zn
2+ > Mn
2+. From the experiments, it was also noticed that the mass of hydrogel loaded over the scaffold seems dependent on the type of crosslinker agent used. In particular, it also seems that the amount of gel loaded on the scaffold follows the same scale of affinity. As shown in
Figure 3e, Ca
2+ cations, with the same procedure, allow to load more gel over the scaffold with respect to the two other ions, all without losing good homogeneity and good stability properties.
Another aspect to take into consideration is the effect of pH on the swelling behavior. In agreement with the results obtained by Da Silva et al. for the hydrogels crosslinked with Mn2+, it does not seem possible to measure the water absorption at different pH levels since the hydrogels dissolved during the first hours of the study. This result is interesting because it shows that the physical interactions generated in the synthesis of the hydrogels (using Mn2+ as crosslinking agent) can be easily broken. This thermodynamic instability was attributed to the competition between the H+ ions of the swelling medium and the Mn2+ ions. In particular, the carboxylic groups responsible of the interactions with the divalent ions Mn2+ in the crosslinking process started to interact with the monovalent cationic ions of the medium (Na+, H+), in the form of carboxylic acid or carboxylic acid salt (−COOH, −COONa) groups, destroying the three-dimensional network. As to the effect of pH on the hydrogels crosslinked with Zn2+ or Ca2+, just a change in the swelling behavior, instead of a complete dissolution, was verified. This is due to the interactions of carboxylic groups with these two cations that are stronger and therefore only partially altered by Na+ or H+ action.
3.4. Drug Release Performances
Considering the different swelling behavior observed by Da Silva et al. [
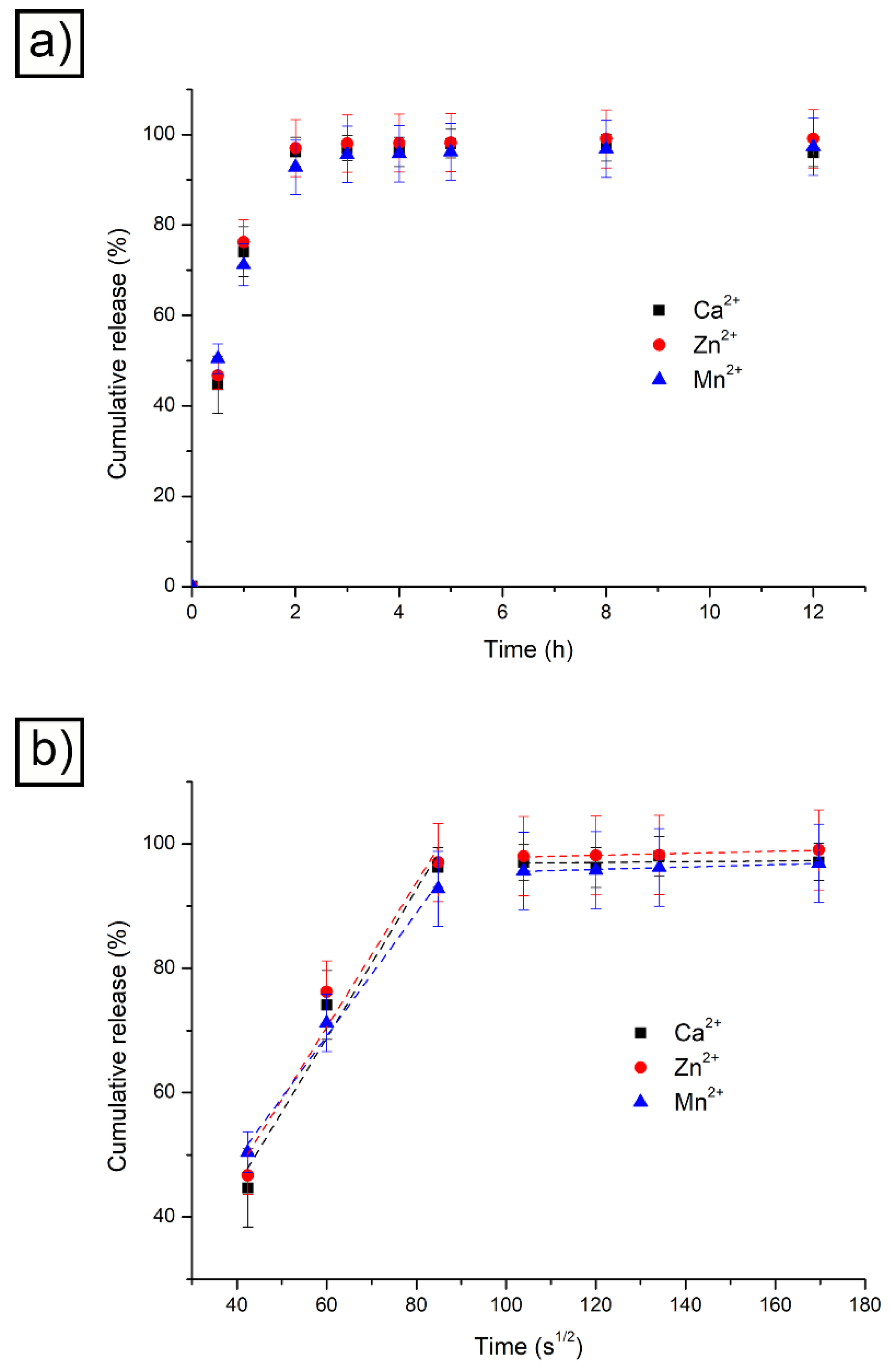
34] for the three different crosslinkers, an observable difference was also expected in the case of drug release performances. RhB release was investigated and the behavior of the three hydrogels was compared. Release studies were conducted at 37 °C and pH 7.4, with the results visible in
Figure 4a. The percentage of RhB released was defined as the ratio between the released amount in the aqueous media and the total amount loaded within the polymeric layer.
It appears evident that, contrary to what expected, the three materials followed a comparable trend, which led to an almost complete release of RhB after roughly two hours. This is in accordance with the fact that RhB presents a very small hydrodynamic radius and its release is not influenced by the different cross-linkers used. Information about the kinetics of the release can be extracted from the data visible in
Figure 4a if the same are plotted against the time square root (
Figure 4b). The initial linear part of the release curve is indicative of Fickian diffusion and the
y-axis intercept value is an indication of burst release. The latter is relatively limited and took place when RhB-loaded devices were placed in the releasing medium. After the initial fast release, the RhB loaded within the three alginate hydrogels showed a marked linear trend only in the first 2 h. This corresponds to a pure Fickian diffusion and is only driven by the concentration gradient. Afterwards, the trend reached a plateau. Indeed, when the main release was completed, the residual drug entrapped within the hydrogel network was slowly released.
The data obtained were used to estimate RhB diffusion coefficients. Operatively, the release mechanism could be considered as a pure Fickian diffusion, the concentration being driven through alginate. Under this assumption, the drug diffusion kinetic can be described as a one-dimensional model of the second Fick law where the device geometry is a cylinder and the material flux mainly takes place at the PBS/hydrogel surface. Equation (2) showed these considerations, indicating
r as the characteristic radius for the mass transport phenomenon. The following mass balance equations are written considering the variation of the mean drug concentration within the hydrogel (
CG) related to the volume of solution (
VS), the mean drug concentration in the outer solution (
CS), the total volume (
VG), the drug present inside the matrix (
mG) and the exchange interfacial surface (
Sexc), which represents the boundary surface between the device and the surrounding solution (which, simplifying, can here be considered as being only the side surface). According to these expressions, the boundary conditions are defined describing the profile symmetry at the center of the polymeric cylinder with respect to the radial axis of the cylinder—Equation (6)—and the equivalence between the material diffusive fluxes at the PBS/hydrogel surface—Equation (7).
This mathematical model allowed to estimate the diffusion coefficient (
D) of RhB. The Sherwood number obtained by means of penetration theory allowed the computation of the mass transfer coefficient
kC—Equation (8).
Table 1 resumes the results obtained.
As expected from the data reported in
Figure 4, the three diffusion coefficients are comparable. This result confirms the limited effect induced by the difference in ionic size of the three crosslinkers on the Rhb release.
Apparently, by considering the results obtained, the most advantageous crosslinking agent for alginate is calcium. Indeed, devices can be loaded with a higher amount of hydrogel, in front of a substantially similar release rate. However, the particular pH-dependent behavior of alginate reticulated with Mn
2+ can be potentially exploited for pH-triggered drug release. The idea, hereby suggested for the first time and qualitatively demonstrated, is that a device coated with Mn
2+ reticulated alginate can almost instantaneously release all its drug load when it reaches an environment characterized by an acidic pH (e.g., the stomach). Indeed, acid degradable polymers present interesting properties for drug delivery [
39,
40]. Diffusion-driven discharge of a drug from a hydrogel is governed by n-order release kinetics [
41], which are in the vast majority of the cases desirable to achieve sustained release. Degradable materials, however, are highly attractive when steep release gradients must be provided (with almost instantaneous release of the drug) [
42]. This is the case for drugs that require high instantaneous concentrations to carry out their therapeutic action. Considering a possible application for pH-triggered drug release, the remaining experimentation presented in the paper was carried out on Mn-containing alginate devices.
3.5. Magnetic Actuation
Prior to functionality evaluation, the magnetic maneuverability of the devices was evaluated. Samples coated with Mn-reticulated alginate were placed inside a water-filled basin (to avoid hydrogel desiccation) and actuated, applying a rotating magnetic field. The principle exploited to move the microrobots is the continuous application of torque on the magnetic material present in the devices to generate a rolling motion. This actuation route, employed also in our previous works [
22,
33], requires the presence of a permanently magnetizable material. Consequently, an alloy like CoNiP (hard magnetic at the composition employed) was selected. As visible in
Figure S9, which depicts the VSM performed on a single device, CoNiP presented a remanence in the order of 1124 Oe (along the 0° direction) and 936 Oe (along the 90° direction). In the convention employed for the VSM test, 0° refers to the direction parallel to the symmetry axis of the device, while 90° is the direction perpendicular to the same axis. These high remanence values are a consequence of the composition of the alloy: 3.08% wt. P, 84.75% wt. Co and 12.24% wt. Ni. Electrodeposited CoNiP layers presenting this composition are characterized by a typical hexagonal close-packed (hcp) structure with a marked preferential orientation along the (002), which justify the high level of coercivity and remanence achievable [
43].
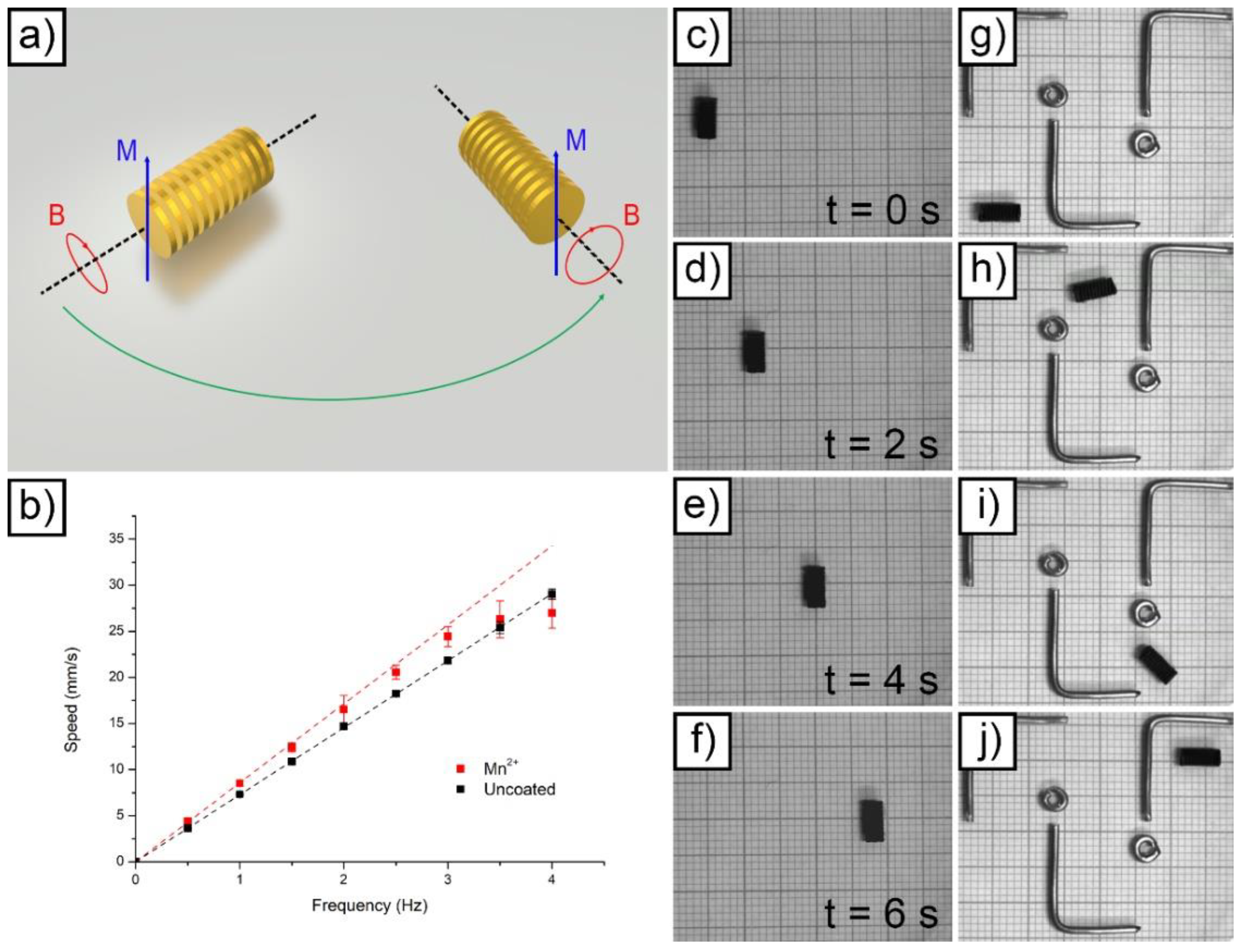
During rolling actuation, the permanent magnetization vector
M introduced in the device by placing it in contact with a permanent NdFeB magnet continuously aligns itself (
Figure 5a) with the external rotating field
B. In this way, the device rotates around its symmetry axis (marked with a dashed black line in
Figure 5a). The contact with a solid surface generates a net forward motion on the device. If the orientation of the axis with B rotates is varied, the direction of the motion can be adjusted and the device can be steered (
Figure 5a). Obviously, in analogy with a wheel, there is a direct dependency between the rotation frequency of the magnetic field and the forward speed of the device. Under the assumption of an ideal contact between the device and the substrate, the speed of the first (
v) correlates to the frequency (
θ) according to Equation (9).
r corresponds to the radius of the device (comprising the rigid part of the device and the hydrogel layer deposited on top). Consequently, the speed/frequency relationship should be linear at any frequency. As demonstrated in our previous paper [
32], this is never true for hydrogel-coated devices due to the presence of the hydrogel itself.
Figure 5b reports the results obtained by performing a linear actuation on a device at increasing frequency. The data clearly evidenced that the uncoated device almost perfectly followed a linear behavior (evidenced by the fitting performed). The hydrogel-coated device, on the contrary, deviated from the linearity at frequencies higher than 2 Hz. The linear fitting was, in this case, limited to the 0 to 2 Hz range.
Considering Equation (9), it appears evident that the slope of the fitted curves visible in
Figure 5b corresponds to
2πr. Consequently, the radius of the devices (resulting from the sum between the radius of rigid platform and the radius of the hydrogel layer applied on top) was easily extrapolated from the slope of the fitted curves. The result was equal to 1.161 mm for the uncoated device and to 1.364 mm for the coated device. The value obtained for the uncoated microrobot is in line with the theoretical one reported in
Table S1 (1.1975 mm). The value obtained in the case of the coated device suggests that the thickness of the Mn-reticulated hydrogel layer was equal to 203 μm. This value does not correspond to the absolute value of thickness for the hydrogel coating. Inside the plates, for example, this value was realistically different due to hydrogel accumulation. The value obtained represents a mean hydrogel thickness in correspondence with the external radius of the devices (on the parallel plates).
Figure 5c–f and
Supporting Video S1 depict the linear actuation performed to obtain the speed data at 0.5 Hz in
Figure 5b. The linear correlation between elapsed time and covered length was evidenced by showing four different frames acquired at increasing times.
Figure 5g–j and
Supporting Video S2 report the result obtained by guiding a Mn-reticulated alginate-coated device to avoid metallic obstacles placed inside the water-filled basin. The device evidenced an excellent maneuverability at 0.5 Hz actuation frequency.
3.6. Targeted pH Dependent Release
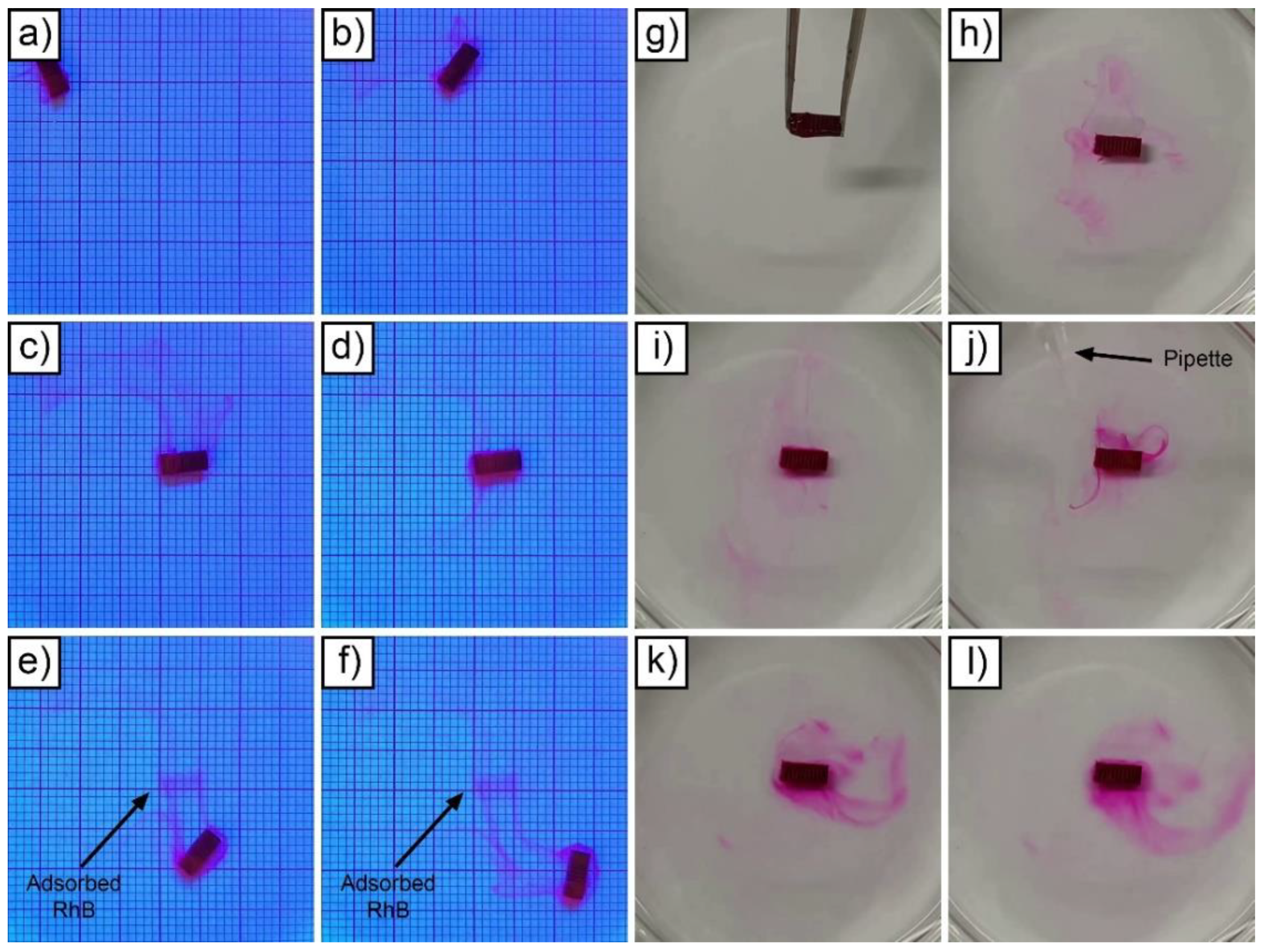
To experimentally validate the basic concept of targeted pH-dependent delivery from a qualitative point of view, two distinct tests were carried out. Initially, the capacity of targeting drug delivery of the devices was tested. A Mn-reticulated alginate-coated device, suitably loaded with RhB, was placed inside a basin and actuated. UV light was exploited to evidence, thanks to RhB fluorescence at 345 nm, the presence of the drug on the walls of the basin. The result obtained is presented in
Figure 6a–f and in
Supporting Video S3. At the beginning of the test, the device moved towards the center of the basin along a curved trajectory. Once it reached the center of the basin, the device was left there for a few seconds to allow release. Then, the device was moved, always along a curved trajectory, toward the lower corner of the basin. Besides the tracks left in the water, UV light evidenced the presence of RhB adsorbed on the bottom of the basin in correspondence with the point where the device stayed for a few seconds. This qualitative result suggests the idea that these devices could be potentially guided in vivo inside the gastrointestinal tract, left in contact with the inner parts of the organs to locally favor the absorption of a drug of choice.
In the second test, visualized in
Figure 6g–l and in
Supporting Video S4, a device analogous to the one used for the previous test was immersed in water. As expected, the microrobot immediately started releasing RhB according to a Fickian diffusion mechanism. In these conditions, nearly total release of the drug potentially required almost two hours (as visible in
Figure 4a). To exponentially increase the release rate, thus allowing immediate drug release, the pH of the water-filled basin was artificially lowered by adding HCl. Specifically, the stomach environment was simulated, reaching pH 3 [
44]. To obtain this condition, a suitable quantity of HCl was added to the basin and rapidly mixed with a pipette. Under these conditions, the device started to quickly release all the RhB contained inside the alginate layer, which rapidly disintegrated in a few-minute timeframe.
Thanks to the low pH, the device expelled its RhB load almost immediately, with a drug release not governed by diffusion in the hydrogel. Furthermore, hydrogel removal by HCl allowed direct reuse of the device.


 ,
, 









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}