1. Introduction
Processes of contact between a deformable solid and a foundation are ubiquitous, and they can be found in many industrial settings, in transportation, in various scientific experimental settings, and in everyday life. This is the reason for the very large amount of engineering literature dedicated to the modeling, numerical approximations, and computer simulations of such processes. In addition, indeed, one can find shelf upon shelf of books and journal publications dealing with the myriad aspects of contact processes.
On the other hand, although the Mathematical Theory of Contact Mechanics (MTCM) has expanded substantially in recent years and is quickly maturing because of the substantial mathematical complexity of most models for contact processes, the theory necessarily became more and more abstract. In a way, the gulf between the highly sophisticated abstract theory and the engineering applications became ever more wider. However, the theory yielded also many different effective computer algorithms for the computer approximations of the solutions of the models with various levels of convergence assertions. Thus, the very abstract theory yielded very useful and practical tools for the simulations of contact models.
Mathematically, contact processes are modeled with complex highly nonlinear and often non-smooth boundary value problems, which explains the various mathematical challenges they pose. In particular, their analysis is carried out by using the so-called weak or variational formulation, which is usually in the form of a variational or hemivariational inequality, or more complex differential set-inclusions. The MTCM has provided many existence, uniqueness, and convergence results, as well as the measurability of the solutions when randomness in the system parameters and inputs is allowed. These were obtained by using the mathematical properties of the convexity, monotonicity, lower semicontinuity of various functions and operators, and various fixed point theorems. A sample of MTCM references are, e.g., the books [
1,
2,
3,
4,
5,
6,
7,
8,
9]. The computation aspects and the related numerical analysis of various models of contact, including numerical simulations, can be find in [
10,
11,
12,
13], see also the recent survey [
14], among a host of many other publications.
A special type of contact problems, which is very challenging mathematically, but is somewhat popular in engineering literature, deals with computational aspects of the models for the processes involved in contact between an elastic solid body and a rigid foundation or surface, the so-called rigid obstacle. This is an idealization of the real process, since there are no perfectly rigid obstacles; however, it is found to be a useful approximation in many applications. Moreover, it leads to a very simple linear complementarity formulation. Indeed, since the obstacle is assumed to be perfectly rigid, the contact conditions are expressed in terms of inequalities for the normal component of the displacement and the stress fields, thus taking into account the non-penetrability of the obstacle or foundation by the body. However, whereas the “classical” formulations is simple, it leads to severe mathematical difficulties, and it took a long time for the MTCM to encompass problems with such a condition. The complementarity condition for the normal surface displacement causes the variational or weak formulation of such problems to be in the form of inequality problems with unilateral constraints. These models may describe a variety of contact settings which arise in the following situations. There is a gap between the surface of the body and the rigid obstacle; there is a thin layer of deformable material that covers the rigid obstacle. Furthermore, the properties of such a thin layer can be elastic, rigid-plastic, or rigid-elastic, for instance. The resulting variational inequalities involve a number of parameters and it is of considerable interest to study the convergence of the solutions with respect to these parameters. Indeed, this allows us to predict the changes in the solutions caused by the perturbations of the data. Moreover, such convergence results establish links between the different models, and justify some of the assumptions made in the modeling of the different physical settings.
The mathematical literature dedicated to general convergence results, within the context of models using differential equations or inclusions, in various settings, function spaces, and under different assumptions is extensive. Such results may be obtained by using different methods and functional arguments, including monotonicity, pseudomonotonicity, compactness, and convexity, among many others. Nevertheless, most of the convergence results in the literature are stated in the following abstract functional framework: Given a functional space X and a problem which has a unique solution , a family of approximating problems is constructed such that, when is a solution of Problem , then converges to u in X, as converges. A careful analysis of this description reveals that, in practice, we need to complete the functional framework above by describing the following three ingredients: (a) the set I to which the parameter belongs; (b) the problem or its sets of solutions, denoted by , for each ; (c) the meaning we give to the convergence of the parameter . Collecting these three ingredients, we arrive in a natural way to the concept of Tykhonov triple, denoted by , where is a set of sequences which governs the convergence of .
Basic properties of Tykhonov triples can be found in [
15]. There, Tykhonov triples have been used to introduce the general concept of
Tykhonov well-posedness in metric spaces and then various applications in functional analysis have been described. The Tykhonov well-posedness concept can be applied to the study of a large class of problems: minimization problems, operator equations, fixed point problems, differential equations, inclusions, sweeping processes, and various classes of inequalities as well. It was introduced in the context of optimization problems in the pioneering work [
16] and was based on two main ingredients: the existence and uniqueness of the solution to a problem and the convergence of every approximating sequence to this solution. For this reason, it provides a framework in which various convergence results may be stated and proved in a unified way. Tykhonov well-posedness results in the study of viscoplastic constitutive laws, anti-plane shear problems with elastic materials and quasistatic contact problems with elasto-viscoplastic materials can be found in the papers [
17,
18,
19], respectively.
In this paper, we use Tykhonov triples as the main ingredient of a unified theory of various convergence results in the study of contact problems with unilateral constraints. Our aim in this work is two fold—first, to describe a few mathematical models for the process of contact of a linearly elastic body with unilateral constraints and to prove their unique weak solvability; second, to obtain convergence results with respect to some of the system parameters and to deduce the relationship among the weak solutions of these models. To this end, we prove a Tykhonov well-posedness result, Theorem 1, which is used to establish the two previous tasks. It is seen that this framework and the theorem allow us to obtain these results in a simple, unified, and elegant functional framework.
Following this introduction, the rest of the paper is structured as follows. In
Section 2, we describe the interface laws of contact we consider in this manuscript. In
Section 3, we present a general mathematical model of static contact, state the assumption on the data, and derive its variational formulation. The latter is in the form of an elliptic quasivariational inequality for the displacement field. Then, in
Section 4, we state and prove the Tykhonov well-posedness theorem. We use this result in
Section 5 and
Section 6 in order to obtain various convergence results together with the corresponding mechanical interpretations. Indeed, these convergence results provide a deeper insight into the connections and relations among the various contact models. As an example for the theory, we provide in
Section 7 a one-dimensional somewhat simple case of the static contact of a rod with a layered obstacle that, nevertheless, presents the main ideas of our approach without the mathematical complications in two or three dimensions. This, in turn, may be used as a benchmark case for testing numerical methods. Finally, concluding remarks and some future work are provided in
Section 8.
2. Interface Laws with Unilateral Constraints
This section presents various interface laws describing the contact process of a deformable body and an obstacle, the so-called foundation. These fall naturally into the conditions in the normal direction and those in the tangential directions. To describe them, we let d belong to the set and be a d-dimensional connected domain representing the solid body, and let and be three relatively open mutually disjoint surfaces such that . Here, denotes the potential contact surface and we let be the unit outward normal to . The equalities and inequalities we write below in this section are valid on . Nevertheless, for the sake of simplicity, we do not mention it explicitly. We denote by u the displacement field and by the stress field in the body. Moreover, we use a dot for the inner product of vectors and the subscripts and denote the normal component and the tangential part of vectors and tensors, respectively. For instance, the normal and tangential displacements are given by , while the normal and tangential components of the stress field are , respectively. We note that the component represents the tangential shear or the friction force.
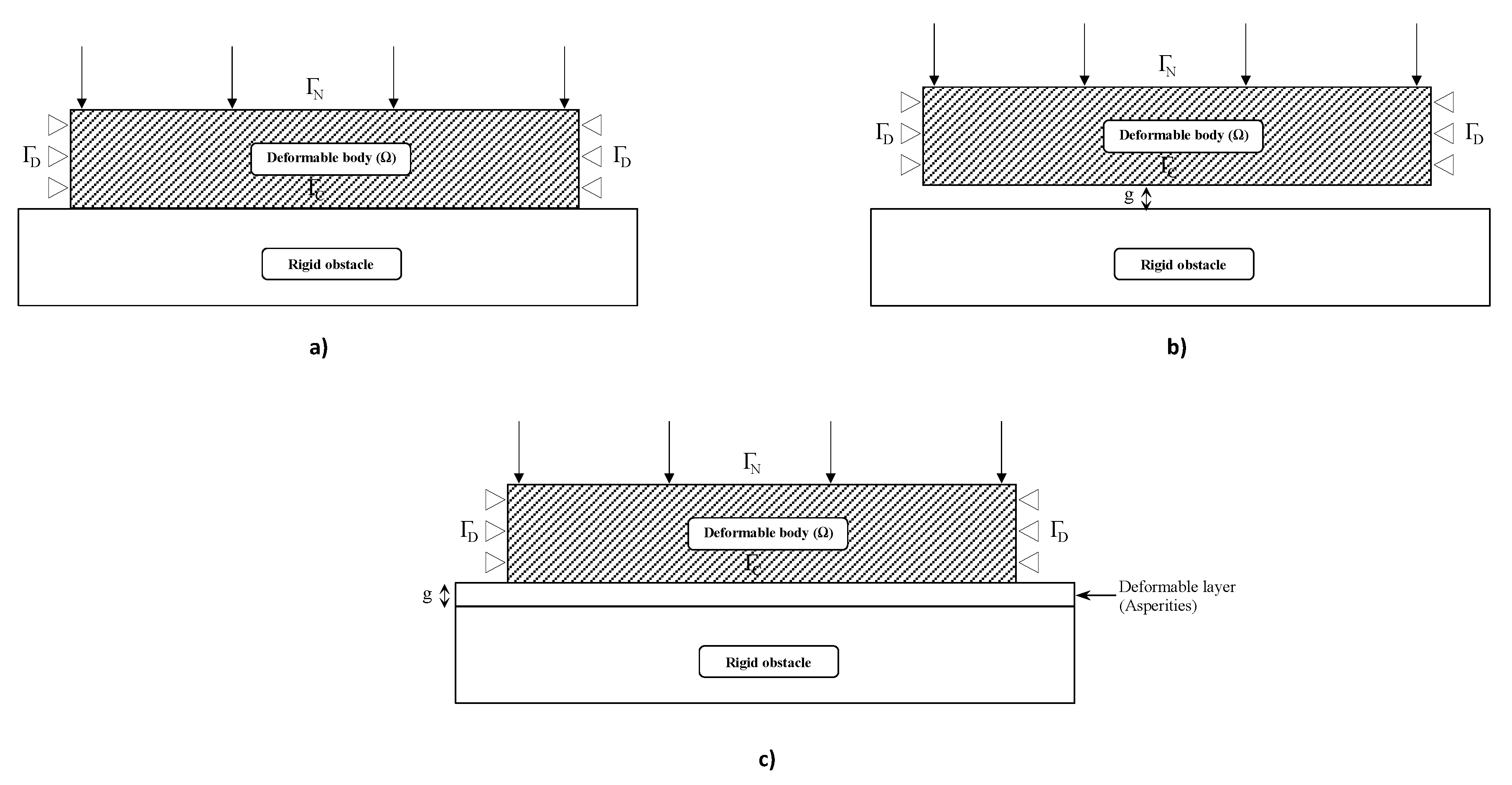
We start with the interface laws in the normal direction, the contact conditions, and consider two different physical settings. In the first one, the foundation is a rigid body and in the second one it is made of a rigid body covered by a layer of deformable material, which may be another material or just the surface asperities.
Contact conditions with a rigid body. First, we assume that the foundation is perfectly rigid, and there is no gap between the deformable body and the foundation, as shown in
Figure 1a. Although there are no perfect rigid bodies, the conditions below turn out to be useful in many applied settings. A popular contact condition used both in engineering literature and mathematical publications is the Signorini contact condition, formulated as follows:
This condition was first introduced in [
20] and then used in many papers, see e.g., Ref. [
7] and the references therein. This condition doesn’t allow interpenetration. When
, there is separation between the body and the foundation and (
1) implies that
, i.e., the normal stress vanishes. When
, there is contact. Therefore, (
1) implies that
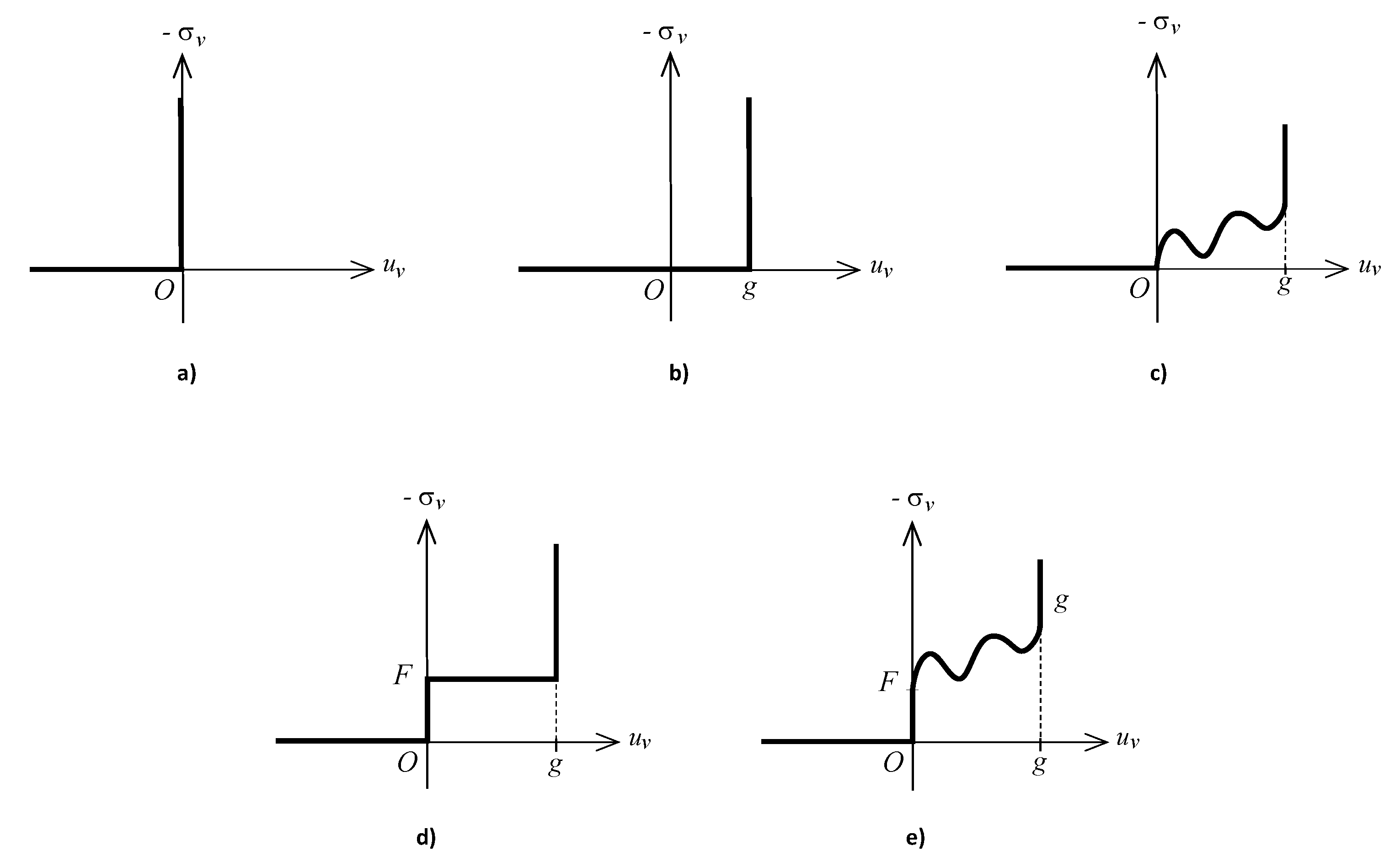
, i.e., the reaction of the foundation is towards the body. A graphic representation of the the Signorini condition (
1) is provided in
Figure 2a.
In the next case, we assume in addition that there is a gap
, in the reference configuration, between the body and the foundation, see
Figure 1b. Then, the Signorini condition reads
The mechanical interpretations of (
2) is very similar to the case
, and, graphically, it is depicted in
Figure 2b.
We next consider more complex conditions.
Contact conditions with a rigid body covered by a deformable layer. Consider now the case when the foundation is made of a rigid body covered with a layer of deformable material of thickness
. This layer may be just the asperities or a softer material, as is shown is shown in
Figure 1c. Then, since the rigid obstacle is impenetrable, we have
Moreover, using the principle of superposition, it follows that the normal stress has an additive decomposition of the form
in which
describes the reaction of the deformable layer and
describes the reaction of the rigid body.
Assume now that the deformable layer has an elastic behavior. Then, for the part
of the normal stress, we use the so-called normal compliance contact condition, which assigns a reactive normal pressure that depends on the interpenetration of the asperities on the body’s surface and those of the foundation. Therefore,
where
p is a nonnegative regular function that vanishes for a negative argument. Indeed, when
, there is no contact and the normal pressure vanishes. When
, there is contact and
represents a measure of the interpenetration into the elastic layer. Then, condition (
5) shows that the layer exerts on the body a pressure that depends on the penetration. In addition, when
, this layer is completely squeezed, and the normal pressure it exerts is
. The normal compliance contact condition was first introduced in [
21] and since then used in many publications, see e.g., Refs. [
13,
22,
23,
24] and the references therein. On the other hand, for the rigid part of the obstacle, we use the Signorini contact condition with a gap (
2). Therefore,
and recall that
represents the thickness of the deformable layer. We now gather conditions (
3)–(
6) and, in this way, we obtain the contact condition
A graphic depiction of the contact condition (
7) is provided in
Figure 2c.
Next, we also consider the case when the deformable layer has a rigid-plastic behavior. In this case, in addition to (
3), (
4), and (
6), we assume that
Here,
F is a given positive traction threshold that may depend on the spatial variable
x. Using (
8), we have
This shows that the layer does not allow penetration and, therefore, behaves as a rigid body, as far as the inequality
holds. It allows penetration only when the threshold is reached,
and, then, it offers no additional resistance, as surface plastic flow commences. Thus, conditions (
8) model the situation when the deformable layer has a rigid-plastic behavior. Moreover, the function
F could be interpreted as the yield limit. Gathering conditions (
3), (
4), (
6), and (
8) yields the contact condition
We may summarize this condition as follows:
- (a)
If
, there is no contact and then (
8) implies that
, (
5) implies that
and, therefore, equality (
4) shows that
. Thus, the contact traction vanishes, as expected.
- (b)
If
, contact has just been established (or is about to be lost) and then (
8) implies that
, (
5) implies that
and, therefore, equality (
4) shows that
. Thus, the layer behaves as a rigid surface.
- (c)
If
, there is thus interpenetration into the layer, and then (
8) implies that
, and (
5) implies that
and, therefore, equality (
4) shows that
. The layer is in the plastic flow regime.
- (d)
If
, the layer is completely squashed, and then (
8) implies that
, and (
5) implies that
and, therefore, equality (
4) shows that
.
The contact condition (
9) is depicted in
Figure 2d. It was used in a number of papers, see, e.g., Ref. [
9] and the references therein.
Finally, we consider the case when the deformable layer has a rigid-elastic behavior. In this case, in addition to (
3), (
4), and (
6), we assume that
Condition (
10) represents a combination of conditions (
5) and (
8) in which
F is a positive function and
p is the normal compliance function; it is positive when the argument is positive and vanishes for a negative argument. Arguments similar to those above show that now the behavior of the deformable layer is rigid-elastic. Here,
F could be interpreted as the yield limit of the layer, while the normal compliance function
p describes its elastic properties. We now gather (
3), (
4), (
6), and (
10) to obtain the following contact condition:
This condition is depicted in
Figure 2e.
Comments on the contact conditions (1), (2), (7), (9), and (11). First, these conditions are expressed in terms of unilateral constraints and are governed by the data
, and
F. Moreover, all of them are described by multivalued relations between the normal displacement and the compressive normal stress, see
Figure 2. In addition, there exists a hierarchy among these contact conditions as follows:
- (a)
Condition (
9) can be obtained from condition (
11) when the normal compliance function
p vanishes, i.e.,
.
- (b)
Condition (
7) is obtained from condition (
11) when the yield limit
F vanishes, i.e.,
.
- (c)
Condition (
2) can be recovered from condition (
9), when
, from condition (
7) when
and from condition (
11) when
and
.
- (d)
The Signorini contact condition (
1) is obtained from conditions (
2), (
7), (
9), and (
11) when
.
We conclude that, among the above conditions, condition (
11) is the most general one. For this reason, it will play a special role in the next two sections.
Coulomb’s law of dry friction. We end this section with the conditions in the tangential directions, also called frictional conditions or friction laws. The simplest one is the so-called frictionless condition in which the tangential part of the stress vanishes. This is an idealization of the process, since even completely lubricated surfaces generate shear resistance to tangential motion. For this reason, we assume in what follows that the tangential traction does not vanish on the contact surface, i.e., the contact is with friction.
Frictional contact between solid surfaces without lubrication is usually modeled with a number of variants of the Coulomb law of dry friction. The classical static version of this law, commonly used in frictional contact problems describing the equilibrium states of elastic bodies, is formulated as follows:
Here,
is the coefficient of friction and
represents the norm of the friction force. The friction law (
12) was intensively studied in the literature; see, for instance, the references in [
7]. It shows that, during the contact process, the magnitude of the friction force is bounded by the positive function
, the friction bound. This is the maximal strength that friction resistance can provide, and above it the surfaces undergo a relative motion. It indicates that the points on the contact surface where the inequality
holds are in the
stick state since there
. The points of the contact surface where
are in the
slip state. There, the friction force
is opposite to the slip
and, moreover, its magnitude equals the magnitude of the friction bound since, in this case, (
12) implies that
.
We note here that “friction force” is not a force in the usual sense, since friction is only resistance to motion and cannot initiate motion, unlike a “real” force. Although we use the term friction force, “frictional resistance force” is the more accurate term in physics, since it just opposes motion.
We now combine Coulomb’s law (
12) with each one of the contact conditions (
1), (
2), (
7), (
9), or (
11), and obtain a specific boundary condition. We note that, when there is separation between the surfaces (i.e., when
in the case of conditions (
1), (
7), (
9), or (
11), and
in the case of condition (
2)), then
and, therefore, the friction bound in (
12) vanishes. This, in turn, implies that
, i.e., the friction resistance force vanishes too. This property is realistic from a physical point of view and expresses the compatibility between the contact conditions with unilateral constraints considered above and the Coulomb law of dry friction.
In mathematical publications, and for mathematical reasons mentioned shortly, the classical Coulomb’s law of dry friction (
12) needs to be modified, and is very often used in its regularized version
Here,
is a continuous regularizing operator that may be considered as the average of the normal stress over a small patch around the contact point. The inclusion of this operator can be traced to [
25,
26]. As explained in [
25], there seems to be some physical justification in considering the normal stress in the friction condition (
13) as averaged over a small surface area which contains many asperities, since the physical contact point usually contains many asperities, and the contact surface is rarely smooth. However, the main motivation for such a choice is mathematical, to avoid otherwise insurmountable difficulties. Indeed, in the weak formulation, the regularity of the stress
does not allow a meaningful definition of the absolute value of the normal stress
on the boundary. To overcome this difficulty, the operator
has been introduced in [
26]. As an example of such an operator, one may use the convolution of
with an infinitely differentiable function that has support in a small area that includes the point where the condition is applied.
The constitutive law of an elastic material is such that
depends explicitly on
u, and we may write it as
, which, in turn, implies that
. Therefore, denoting by
R the regularizing operator defined by
in the case of elastic materials, we can write the regularized friction law (
13) as follows:
Details on the regularized friction law (
14) can be found in [
7] and, therefore, we skip them here. We just mention that in this paper we deal with contact problems for linearly elastic materials and, therefore, we use the regularized version (
14) of Coulomb’s law of dry friction. The properties of the regularizing operator
R will be described in the next section.
3. Main Problem and Variational Formulation
This section presents the physical setting of the contact problem we are interested in, lists the assumption on the problem data, and derives its variational formulation.
Assume that a deformable solid body occupies, in the reference configuration, an open, bounded, and connected set
(
). The boundary
is composed of three relatively closed sets
,
and
, such that the relatively open sets
,
, and
are mutually disjoint and, moreover, the measure of
is positive. The body is clamped on
. Tractions of surface density
act on
and, moreover, body forces of density (per unit volume)
act in
. The body can come into contact on
with another solid, which is called an “obstacle” or “foundation”, as shown in
Figure 1. Our interest is in the static mechanical equilibrium; the body is assumed to be linearly elastic; and the main interest is in what happens on the contacting surface.
We use bold face letters for vectors and tensors; the outward unit normal on is denoted by ; the spatial variable is denoted by x and, in order to simplify the notation, we do not indicate explicitly the dependence of the various functions on x.
We denote by
the space of second order symmetric tensors on
and
and
represent the displacement and the stress fields, respectively. The mathematical model that describes the equilibrium of the elastic body, under the previous mechanical assumptions, consists of the following equations:
The elastic constitutive law is given in (
15) in which
is the elasticity tensor, and
denotes the linearized strain field. The equilibrium Equation (
16) describes the static process that is assumed here. Next, the displacement–traction boundary conditions associated with this physical settings are
To complete the model, we add the friction law (
14) and one of the contact conditions introduced in
Section 2. We recall that condition (
11) is the most general one and, therefore, we start by using this contact condition. Since it is governed by the data
g,
p,
F, we denote in what follows by
the resulting mathematical model. To conclude, the main problem we consider can be stated as follows.
Problem 1. . Find a displacement field and a stress field that satisfy (15)–(18), (11) and (14). In the variational analysis of this problem, we denote by “·”,
and
0 the inner product, the Euclidean norm, and the zero element of the spaces
and
, respectively. We use the standard notation for the Sobolev and Lebesgue spaces associated with
and
and, for an element
, we usually write
v for the trace
of
v on
. Moreover, we denote by
and
the normal and tangential components of
v on the boundary, given by
and
, respectively. We also use the spaces
which are real Hilbert spaces endowed with the canonical inner products
Recall that, in (
19) and (
16),
and
represent the deformation and the divergence operators, respectively, i.e.,
Here and below, an index that follows a comma denotes the partial derivative with respect to the corresponding component of
x, i.e.,
, and the summation convention over a repeated index is used. The associated norms on these spaces are denoted by
and
, respectively. We use
and
to denote the strong and the weak convergence on
V and
for the zero element in
V. Moreover, it follows from the Sobolev trace arguments that there exists a constant
such that
Finally, we recall that, for a regular stress function
, the following Green’s formula holds:
We now list the assumption on the data of the contact problem
. The elasticity tensor
is symmetric and positively definite, i.e., it satisfies the conditions
The regularization operator
R is Lipschitz continuous, i.e.,
We also assume that the densities of the body forces and surface tractions and the thickness of the deformable layer are such that
Moreover, the normal compliance function
p, the yield limit
F, and the coefficient of friction
satisfy the following conditions:
Finally, we assume that the following smallness condition holds:
where
,
,
, and
are the positive constants in (
20), (
23), (
27), and (
22), respectively.
We turn to construct a variational inequality formulation of the problem. To that end, we consider the set
, the form
, the function
and the element
defined by
where, here and below,
represents the positive part of
r, which is
.
Next, standard arguments based on the Green formula (
21) show that, if
is a smooth solution of Problem
and
, then
To deal with the third term on the right-hand side, we rewrite it as
and, using the boundary conditions (
11), we deduce that
Moreover, using the friction law (
14), we find that
We now combine (
34) with inequalities (
35) and (
36) and obtain
Finally, we use inequality (
37), the notations (
32) and (
33) and the fact that
to obtain the following variational formulation of Problem
, in terms of the displacements.
Problem 2. . Find a displacement field such that A function
which satisfies inequality (
38) is called
a weak solution of the contact problem
. Once the existence of a weak solution is found, the stress function can be obtained by using the elastic constitutive law (
15).
4. Tykhonov Well-Posedness
In this section, we study the Tykhonov well-posedness of Problem
and, to this end, we start by recalling some of the necessary abstract setting and concepts introduced in [
15].
Consider an abstract mathematical object , called a generic ”problem,” that is associated with a metric space . Problem could be an equation, or a problem of minimization, a fixed point, an inclusion, or an inequality. We associate with Problem the concept of “solution”, which depends on the context. We also denote by the set of solutions to Problem . Problem has a unique solution iff has a unique element, i.e., is a singleton. For a nonempty set B, we denote by the set of sequences whose elements belong to B, and is the set of all nonempty subsets of B. The concept of well-posedness for Problem is related to the so-called Tykhonov triple, defined as follows.
Definition 1. A Tykhonov triple is a mathematical object of the form , where I is a given nonempty set, and is a nonempty subset of the set .
Below, we refer to I as the set of parameters; the family of sets represents the family of approximating sets; finally, defines the criterion of convergence.
Definition 2. Given a Tykhonov triple , a sequence is called an approximating sequence if there exists a sequence such that for each .
Definition 3. Given a Tykhonov triple , Problem is said to be well-posed in the sense of Tykhonov if it has a unique solution, and every approximating sequence converges in X to this solution.
We remark that approximating sequences always exist since, by assumption, and, moreover, for any sequence and any , the set is not empty. In addition, the concept of approximating sequence depends on the Tykhonov triple and, for this reason, we use the terminology “-approximating sequence”. As a consequence, the concept of well-posedness depends on the Tykhonov triple and, therefore, we refer to it as “well-posedness with respect to ” or “-well-posedness,” for short.
We turn now on the well-posedness of Problem
and, to this end, we consider the Tykhonov triple
, defined as follows:
Here,
represents a potential thickness and the set
is defined by (
31), replacing
g with
. We next note that, for mathematical reasons, we introduce a positive parameter
in the definition of the Tykhonov triple (
39)–(
41). Convenient choices of this parameter allow us to obtain various convergence results to the solution of the variational inequality (
38), as we show in
Section 5.
Our main result in this section is the following:
Theorem 1. Assume that (22)–(30) holds. Then, Problem is well-posed with respect to the Tykhonov triple (39)–(41). The
-well-posedness of Problem
can be established by using the general results on the well-posedness of variational-hemivariational inequalities in [
27]. Nevertheless, the statement of the results there requires additional definitions and preliminaries and, therefore, for the convenience of the reader, we present here a direct proof of Theorem 1, which is structured in four steps, as follows.
Proof. (i)
Existence of a unique solution of Problem . First, we remark that
, defined by (
31), is a closed, nonempty, and convex set in
V. Next, assumptions (
22) on the elasticity tensor show that the bilinear form
, defined by (
32), is symmetric, continuous, and coercive. More precisely, it satisfies the inequality
In addition, using the assumptions (
23), (
27)–(
29), it follows that the functional
is convex and continuous. Then, the inequalities (
20) and (
23) imply that
Inequalities (
42) and (
43) combined with the smallness assumption (
30) allow us to use Theorem 3.7 in [
28] to deduce the unique solvability of Problem
.
(ii)
Weak convergence of approximating sequences. Assume that
is a
-approximating sequence. Then, using Definition 2, we deduce that there exists a sequence
such that
for each
. Therefore, definitions (
40), (
41), and (
31) imply that
for each
, where
and, moreover,
as
.
Let
be fixed. We choose
in (
44) and, since
,
, we find that
Next, inequality (
42) implies that
and, using (
47), we obtain that the sequence
is bounded in
V. This, in turn, implies that there exists an element
and a subsequence of
, still denoted by
, such that
It follows that
a.e. on
and, using the definitions (
45), (
31) combined with the convergence (
46), we deduce that
Let now
and, for each
, consider the element
defined by
Then, it is straightforward to see that
and, moreover,
We now use (
44) to see that
then we pass to the lower limit in this inequality and use the convergences (
48) and (
50), the compactness of the trace operator and the properties of the form
a and the function
to find that
Next, since
, we obtain
which implies that
Combining (
49), (
51), and (
52) yields
which shows that
is a solution of Problem
. We now use the uniqueness of the solution of this problem to deduce that
. This equality and a standard argument imply that the whole sequence
convergences weakly to
u in
V, i.e.,
(iii)
Strong convergence of approximating sequences. For each
, we consider the element
defined by
Then,
and, moreover,
In addition, it follows from (
44) that
We now use the coercivity of the form
a (
42) to find that
and then (
55) yields
Next, we pass to the limit in this inequality and use the convergences (
54), (
53), and (
47) to deduce that
Finally, we combine (
54) and (
56) and obtain
which concludes the proof of this step.
(iv)
The proof. It follows from step (i) that Problem
has a unique solution, and it follows from the step (iii) that every
-approximating sequence converges in
V to this solution. These two facts combined with Definition 3 show that Problem
is well-posed with respect to the Tykhonov triple (
39)–(
41), and this concludes the proof. □
6. Additional Convergence Results
We turn now to some special cases of the general convergence result (
64), related to the different boundary conditions mentioned in
Section 2, for which we present additional mechanical interpretations. To this end, we consider the following contact problems:
Problem 4. . Find a displacement field and a stress field which satisfy (15)–(18), (9), and (14). Problem 5. . Find a displacement field and a stress field which satisfy (15)–(18), (7), and (14). Problem 6. . Find a displacement field and a stress field , which satisfy (15)–(18), (2), and (14). Problem 7. . Find a displacement field and a stress field which satisfy (15)–(18), (1) and (14). Using the relationship between the contact conditions (
1), (
2), (
7), (
9), and (
11) discussed in
Section 2, we have:
- (a)
Problem is a particular case of Problem , obtained when .
- (b)
Problem is a particular case of Problem , obtained when .
- (c)
Problem is a particular case of Problem , obtained when , a particular case of Problem obtained when , and a particular case of Problem , obtained when and .
- (d)
Problem is a particular case of Problems , and obtained when , for any p and F.
Therefore, using the notation
the variational formulations of these problems represent particular cases of the Problem
and are as follows:
Problem 8. . Find a displacement field such that Problem 9. . Find a displacement field such that Problem 10. . Find a displacement field such that Problem 11. . Find a displacement field u such that We now make the somewhat weaker assumption
and note that, if (
58) holds with
, then (
73) holds too. Then, the unique solvability of the variational problems above is provided in the following result.
Corollary 1. Assume that (22)–(25), (29) hold. Then: - (a)
Under assumptions (26), (28), and (73) Problem has a unique solution . - (b)
Under assumptions (26), (27), and (30) Problem has a unique solution . - (c)
Under assumptions (26) and (73), Problem has a unique solution . - (d)
Under assumption (73), Problem has a unique solution u.
Corollary 1 is a direct consequence of the unique solvability of the variational problem
, guaranteed by Theorem 1 and Definition 3. Moreover, under assumptions (
23), (
27), (
28), and (
29), it is straightforward to check that
Therefore, with the notation in Corollary 1, we have
To proceed with the analysis, we introduce the following assumptions:
Then, as a direct consequence of Theorem 2 and equalities (
74), we obtain the following convergence results.
Corollary 2. Assume that (22)–(25), (29) hold. Then: - (a)
Under assumptions (26), (28), (26)n, (27)n, (28)n, (58), (61), (62), (77), the solutions of Problems converge to the solution of Problem , which is - (b)
Under assumptions (26), (27), (28)n, (30), (26)n, (27)n, (58), (61), (63), and (76), the solution of Problem converges to the solution of Problem , which is - (c)
Under assumptions (26), (26)n, (27)n, (28)n, (58), (61), (76), and (77), the solution of Problem converges to the solution of Problem , which is - (d)
Under assumptions (26)n, (27), (27)n, (28), (28)n, (58), (62), (63), and (75), the solution of Problem converges to the solution u of Problem , which is - (e)
Under assumptions (26), (26)n, (28), (28)n, (61), (62), and (73), the solution of Problem converges to the solution of Problem , which is - (f)
Under assumptions (26), (26)n, (28)n, (61), (73), and (76), the solution of Problem converges to the solution of Problem , which is - (g)
Under assumptions (26)n, (28), (28)n, (62), (73), and (75), the solution of Problem converges to the solution u of Problem , which is - (h)
Under assumptions (26), (27), (26)n, (27)n, (30), (58), (61), and (63), the solution of Problem converges to the solution of Problem , which is - (i)
Under assumptions (26), (26)n, (27)n, (58), (61), and (77), the solution of Problem converges to the solution of Problem , which is - (j)
Under assumptions (26)n, (27), (27)n, (58), (63), and (75), the solution of Problem converges to the solution u of Problem , which is - (k)
Under assumptions (26), (26)n, (61), and (73), the solution of Problem converges to the solution u of Problem , which is - (l)
Under assumptions (26)n, (73), and (75), the solution of Problem converges to the solution u of Problem , which is
Each one of the convergences above has an appropriate mechanical interpretation. Moreover, they indicate how such problems with these interface or boundary conditions can be approximated by the related problems.
First, the convergences (
82), (
85), and (
88) establish the continuous dependence of the weak solutions of Problems
,
, and
, respectively, with respect to the data. Note that in this case the convergences hold between solutions of problems constructed with the same interface law, but with different data. In contrast, the rest of the results in Corollary 2 lead to convergence of the weak solutions of contact problems that have a different feature, since they are formulated in terms of different interface laws. Indeed, for instance, we list the following:
(a) In the particular case when
and
, the convergence (
79) becomes
This shows that the weak solution of the contact problem with a rigid foundation covered by an elastic layer,
Figure 2c, can be approached by the solution of a the contact problem with a foundation made by a rigid body covered by a layer of rigid-elastic material,
Figure 2e, when the yield limit
F of this layer converges to zero, so the layer becomes fully elastic.
(b) In the particular case when
, the convergence (
84) and equalities (
74) imply that
This shows that the weak solution of the contact problem with a rigid body,
Figure 2a, can be approached by the solution of the contact problem with a foundation made by a rigid body covered by a layer of rigid-plastic material,
Figure 2d, when the thickness of this layer converges to zero.
We note that, in addition to the mathematical interest in these convergence results (which asserts the stability of the solution), they are very important from the mechanical point of view, since they allows us to establish the links among the different contact models. Indeed, these results show that, for small values of some of the parameters, we can replace, that is, approximate as closely as we wish, some of the more complex models by simpler ones.
7. A One-Dimensional Example
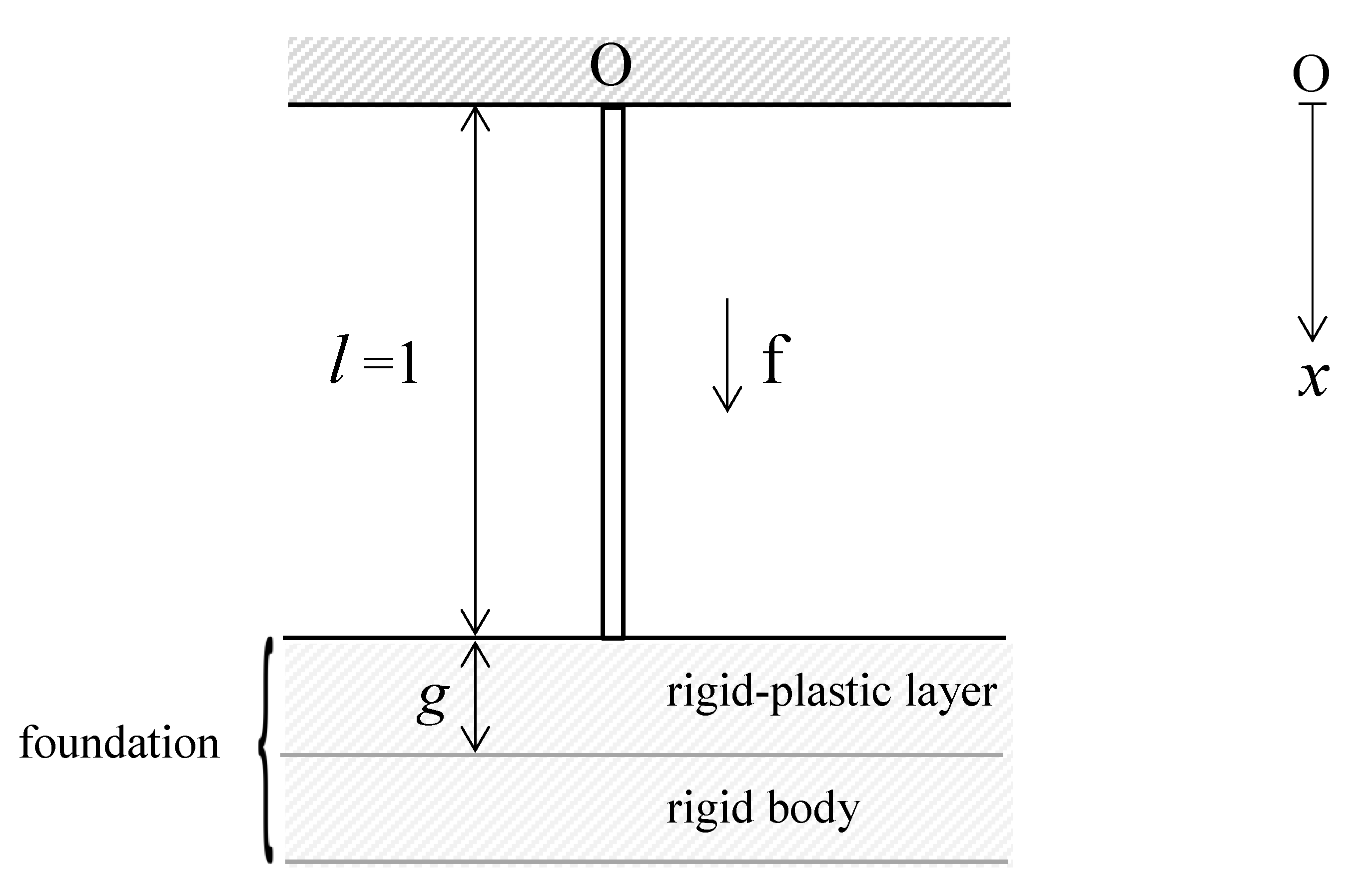
This section illustrates our theoretical results and studies a representative one-dimensional example, that of a static elastic beam in contact with a two-layered foundation. We chose it since it is easier to explain the main ideas of this work but without the complications that arise in two or three dimensions. Thus, we consider a version of Problem
, where the elastic beam of length
is rigidly attached at
and may come in contact, under the action of a force density (per unit length)
, with a foundation at
. The foundation has a deformable layer of the rigid-plastic type of thickness
, which is attached to a rigid body underneath. In the notation above, we have
,
,
,
. The setting is depicted in
Figure 3.
We denote by [m] the displacement, and then the linearized strain field is given by (dimensionless), where, here and below, the prime denotes the derivative with respect to . We denote by Y [kg/m s] the Young modulus of the rod’s material, A [m] the cross sectional area of the rod, and then [kg m/s] is the effective (1D) Young modulus. The stress in the rod is given by [kg m/s], and within linearized elasticity, . For the sake of simplicity, we assume that does not depend on the spatial variable.
The statement of the problem of static contact between an elastic rod and a rigid-plastic foundation is the following.
Problem 12. . Find a displacement field and a stress field , such that Here, is the rigid-plastic material yield limit, assumed to be positive. One can combine Equations (1) and (2) into ; however, we write it in this way to conform to the formulation of the abstract problems above.
We proceed to the the variational formulation and analysis of Problem
. To that end, we use the space
and the set of admissible displacement fields is defined by
Then, the variational form of Problem , obtained using integration by parts, is as follows.
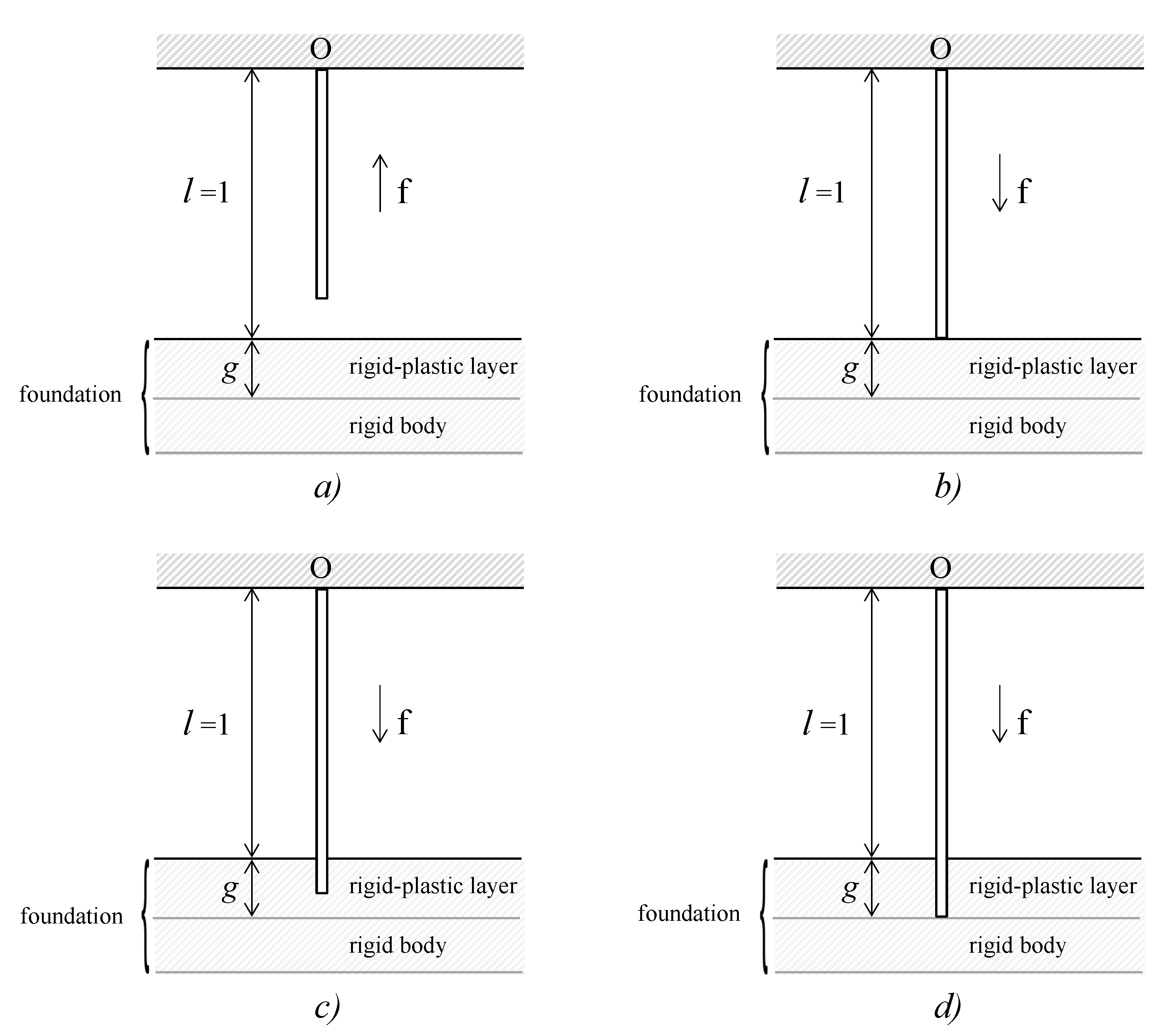
Problem 13. . Find a displacement field such that The existence of a unique solution to Problem follows from Corollary 1(a). However, since the example is “simple”, direct calculations allow us to solve Problem and obtain closed form solutions. As was noted above, these may be used to calibrate and verify numerical algorithms for realistic engineering problems. It is found that there are four different possible cases that depend on the relationship between f and F. We describe each one and its corresponding mechanical interpretation.
(a)
The case . The body force acts away from the foundation and then the solution of Problem
is given by
In this case, as is to be expected since there is no contact,
and
. Since there is separation between the rod’s end and the foundation, there is no reaction at
. This case corresponds to
Figure 4a.
(b)
The case . The force pushes the rod towards the foundation and the solution of Problem
is given by
We have
and
, which shows that the rod is in contact with the foundation, just touching it, and the reaction of the foundation is towards the rod. Nevertheless, there is no penetration, since the magnitude of the stress at
is under the yield limit
F and, therefore, the rigid-plastic layer behaves like a rigid layer. This case is depicted in
Figure 4b.
(c)
The case . In this case, the force is sufficiently large to cause the penetration of the rod’s end into the rigid-plastic layer. The solution of Problem
is given by
We have
and
. This, indeed, shows that the stress at
reached the yield limit and, therefore, there is penetration into the rigid-plastic layer which now behaves plastically. Nevertheless, the penetration is partial and
. This case is shown in
Figure 4c.
(d)
The case . Here, the applied force is sufficient to make the whole layer plastic. The solution of Problem
is given by
We have
and
, which shows that the rigid-plastic layer is completely penetrated and the displacement of the point
reaches the rigid body. The magnitude of the reaction in this point is larger than the yield limit
F since, besides the reaction of the rigid-plastic layer, there is also the reaction of the rigid body, which becomes active in this case. This case is depicted in
Figure 4d).
The analytic forms (
95)–(
98) of the solution in the four cases show clearly the continuous dependence of the solution on the data
F and
g, which is the content of Corollary 2(e)–(g). For instance, denote in what follows by
the solution to Problem
for
and
, for all
. Then, it follows from (
95)–(
98) that
where
and
are the functions defined by
if
, and
if
. On the other hand, it is easy to see that the couple
is the solution to the Signorini problem without a gap, that is:
Problem 14. . Find a displacement field and a stress field , which satisfy (90)–(92) and , , . Therefore, the convergence (
99) represents a validation of the convergence result (
84).

{kind=link}
{kind=link}
{kind=link}
{kind=link}



