
An Improved Fault Identification Method for Electromechanical Actuators





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Scope of the Work and Novelties Introduced
- 1.
- Faults vectors are generated, and the system is simulated using these values, obtaining a simulations dataset;
- 2.
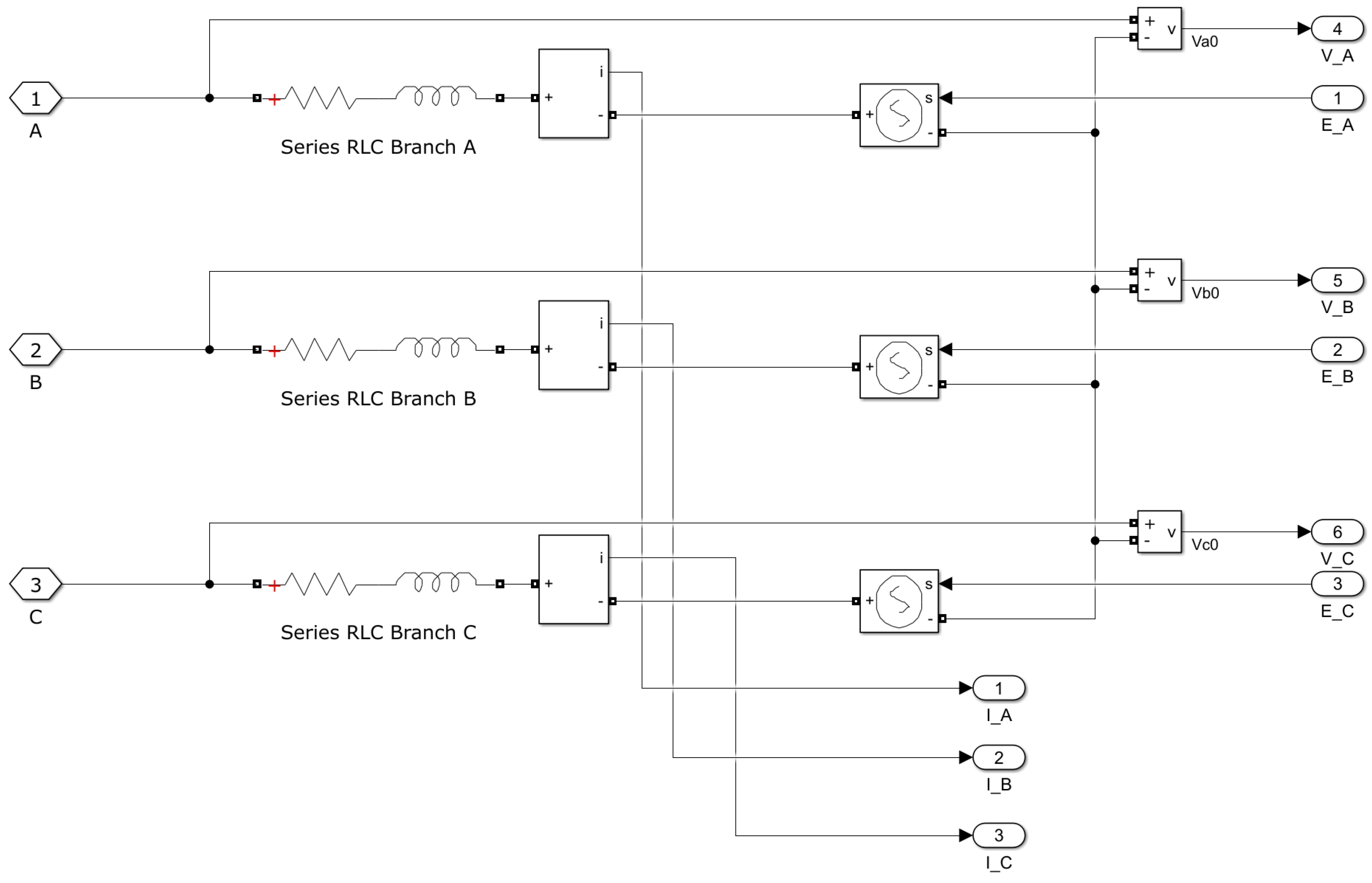
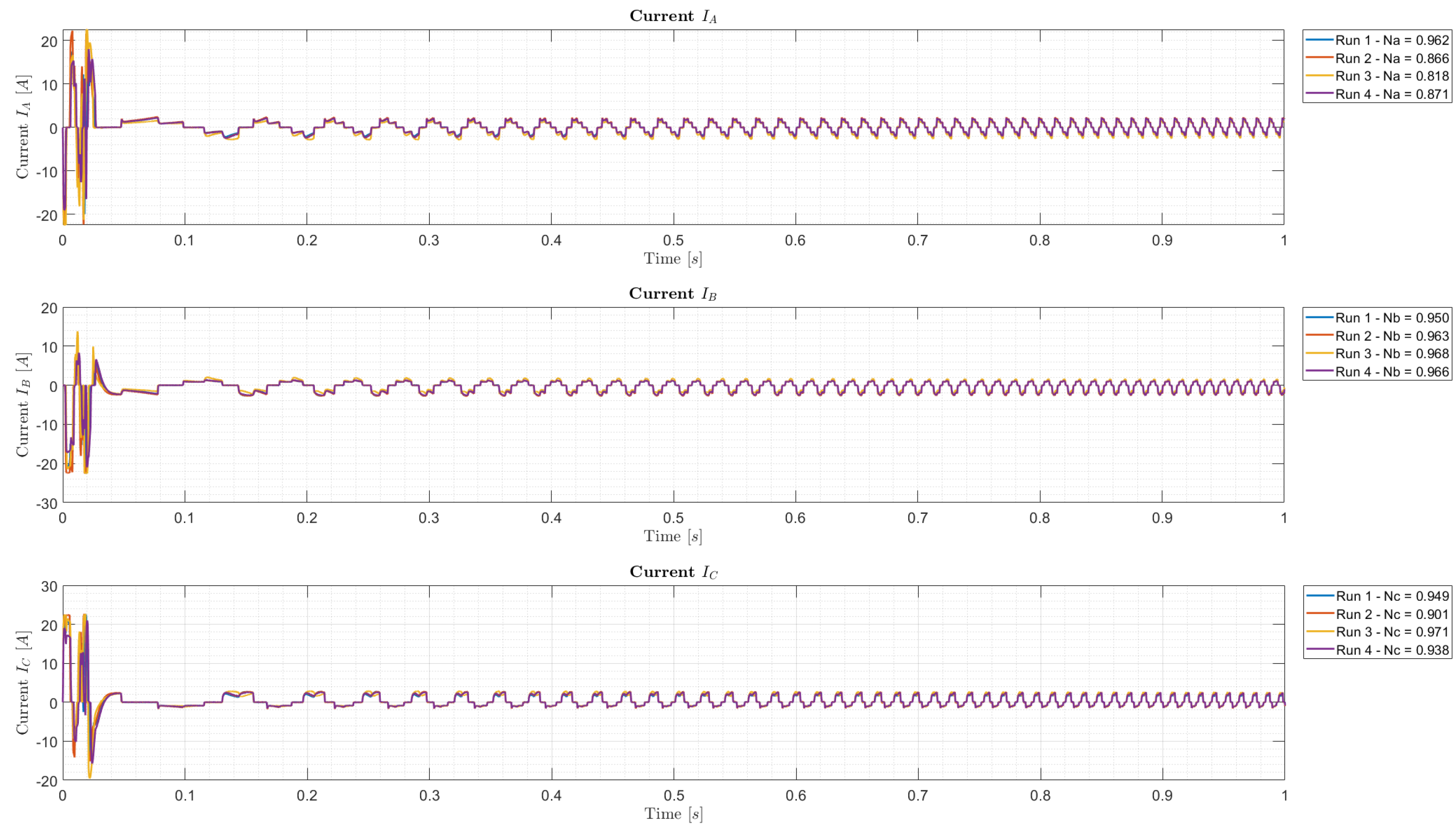
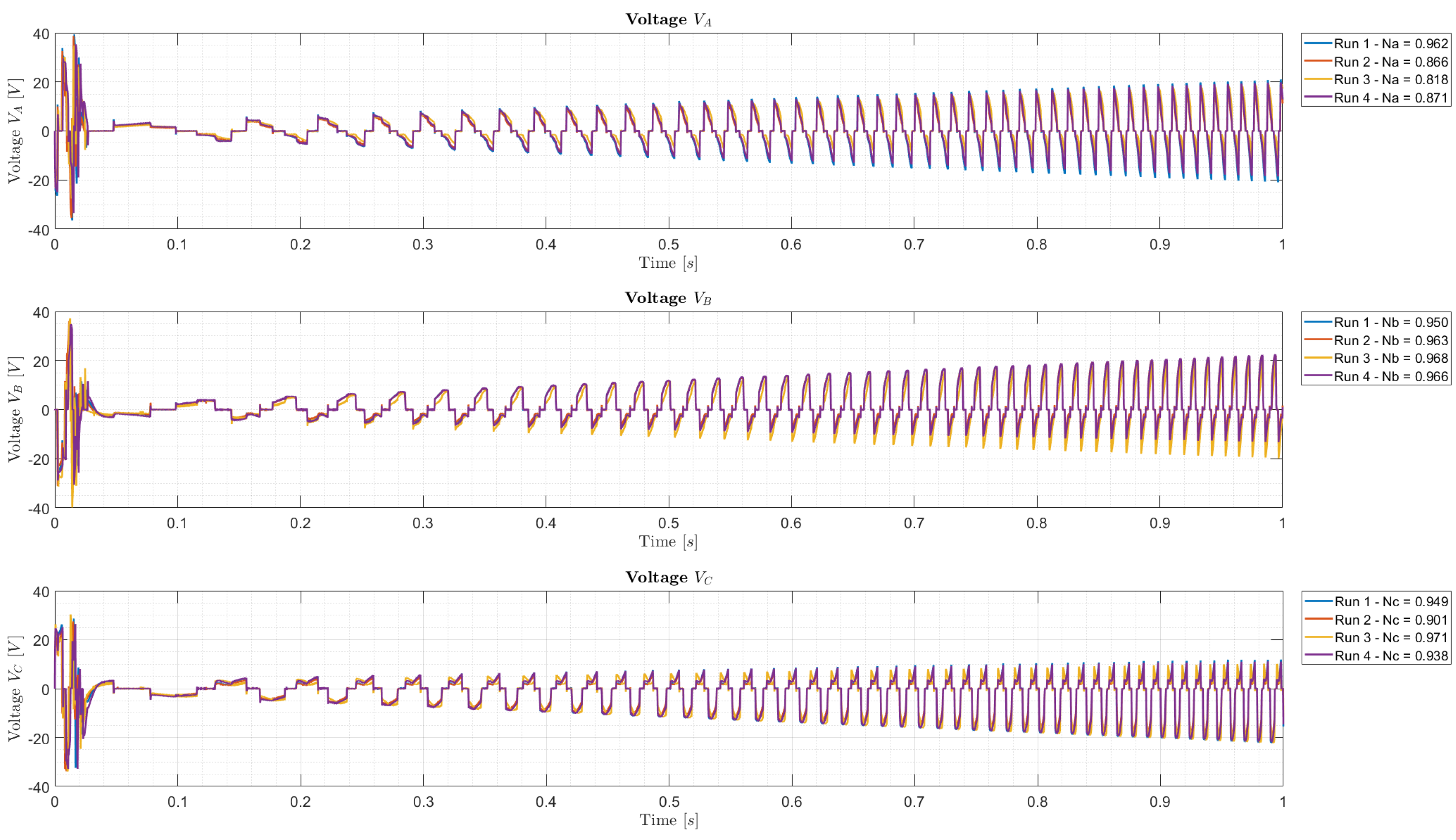
- Relevant physical quantities are logged for each simulation (e.g., voltages, currents, motor angular position and speed);
- 3.
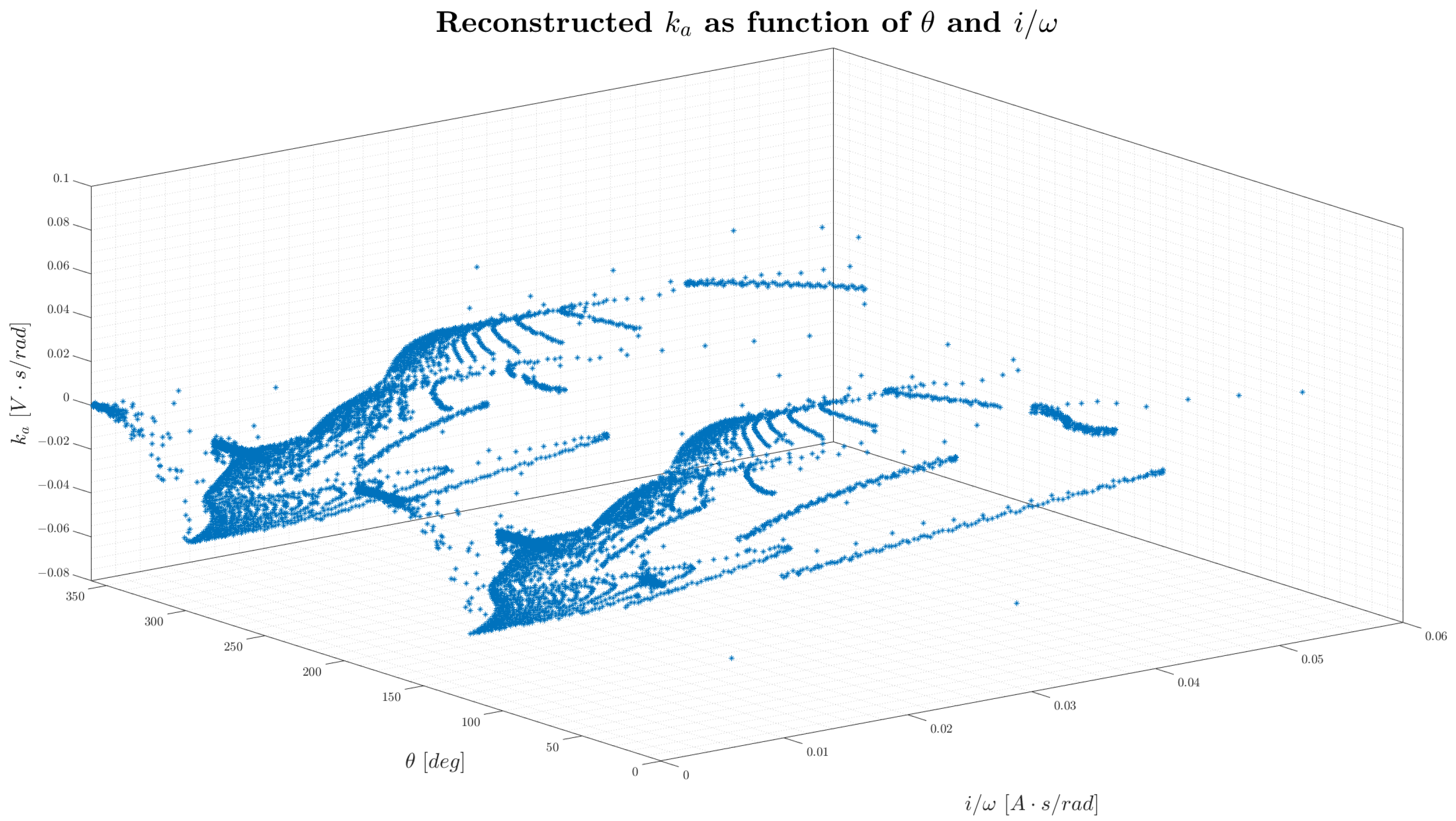
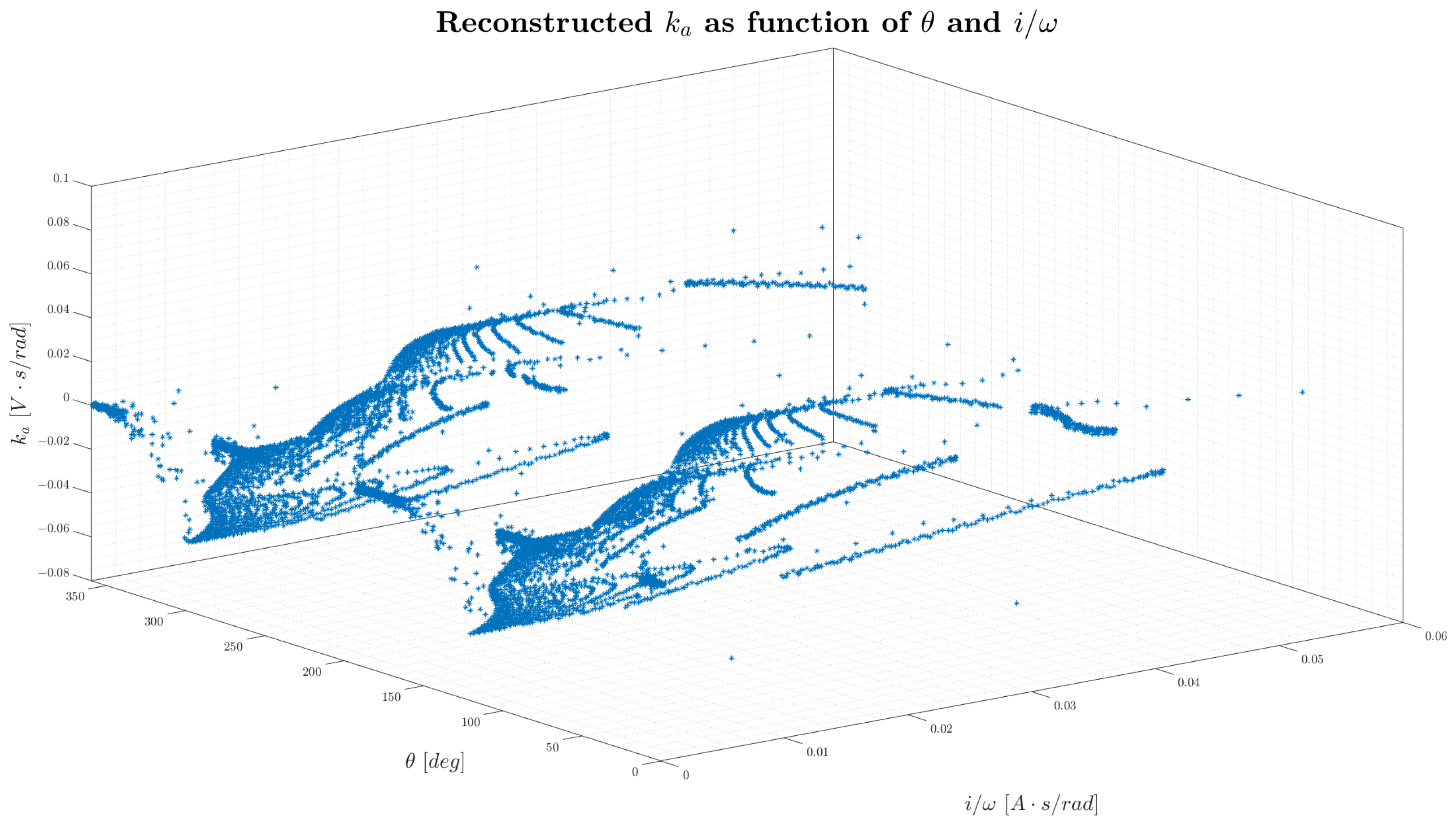
- In each simulation, for each phase, an estimation of the back-EMF coefficient is calculated;
- 4.
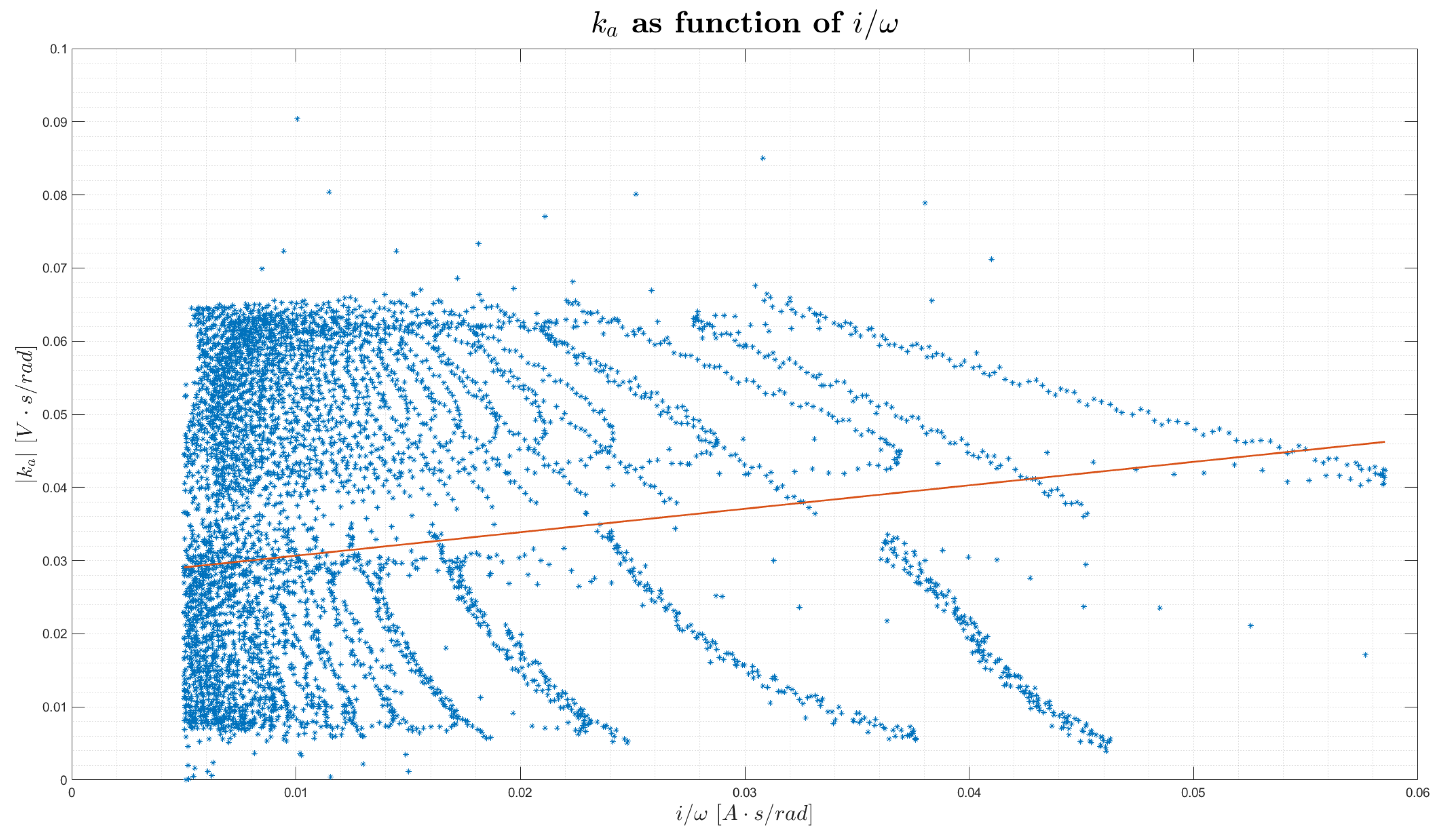
- Estimation error is minimized by obtaining the real values of phase resistance and back-EMF coefficient;
- 5.
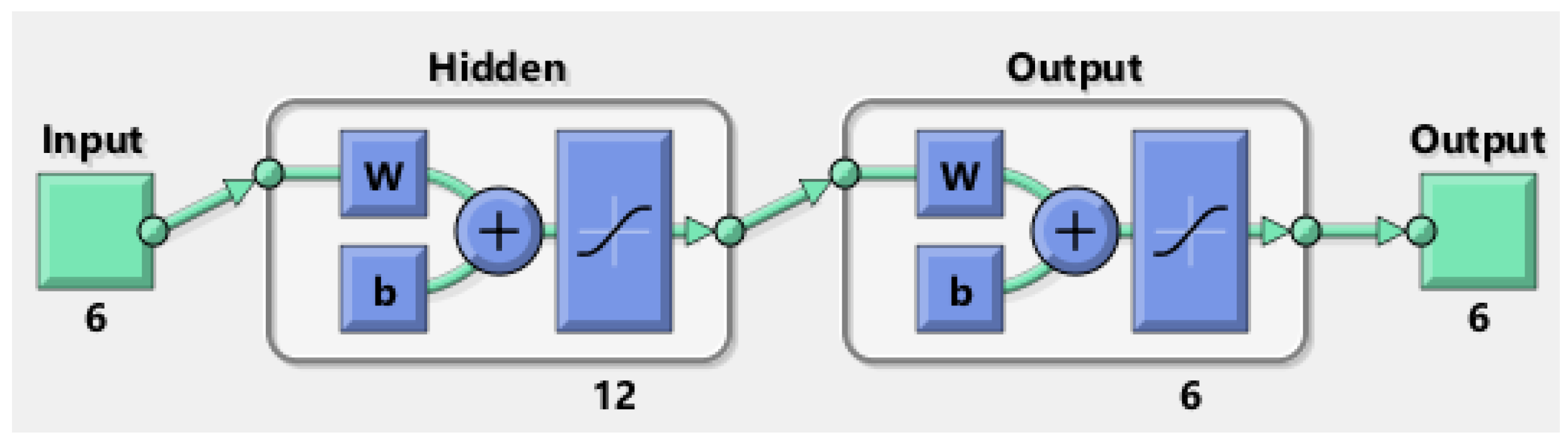
- These values are used in a neural network to predict the health status of the system.
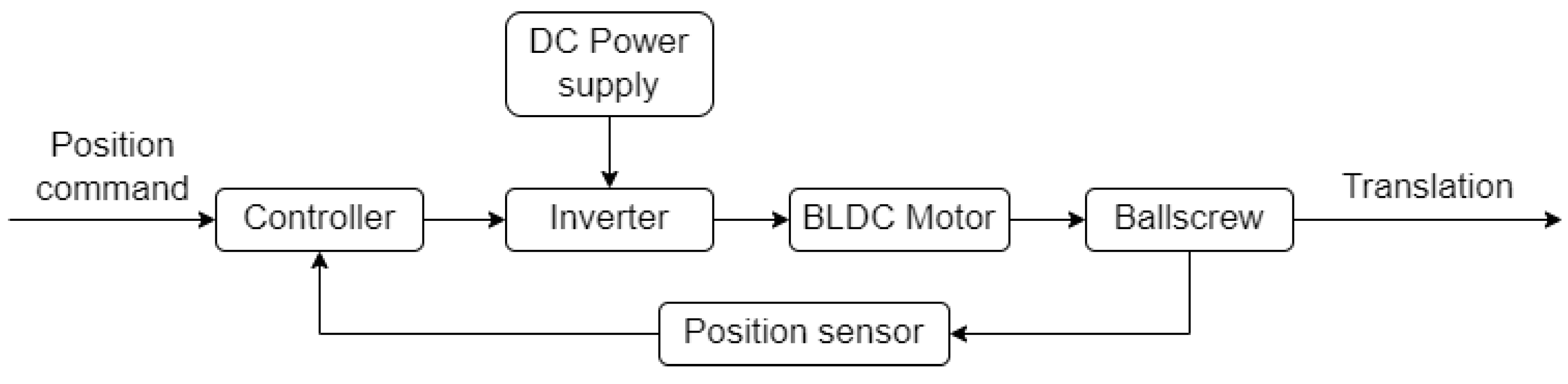
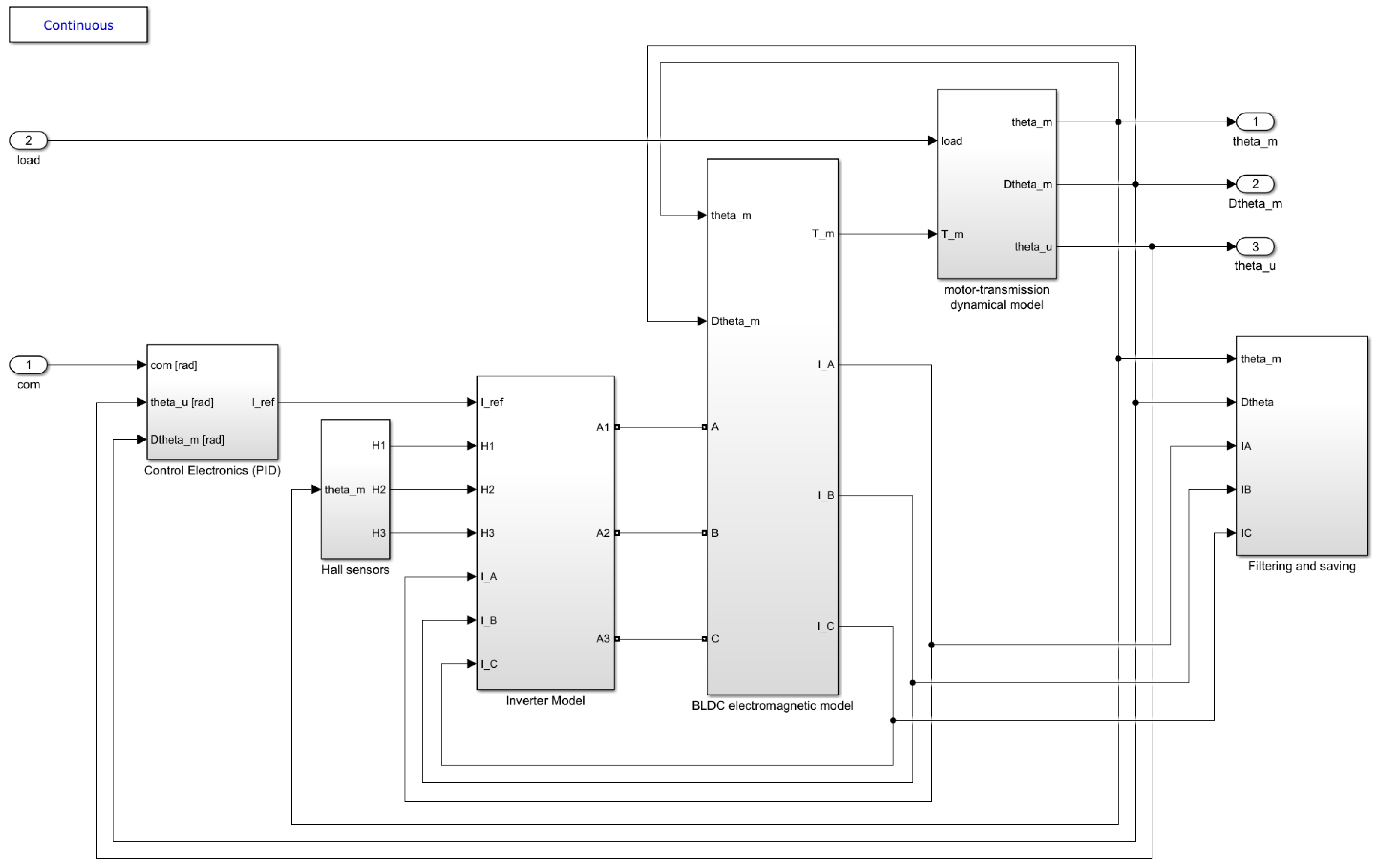
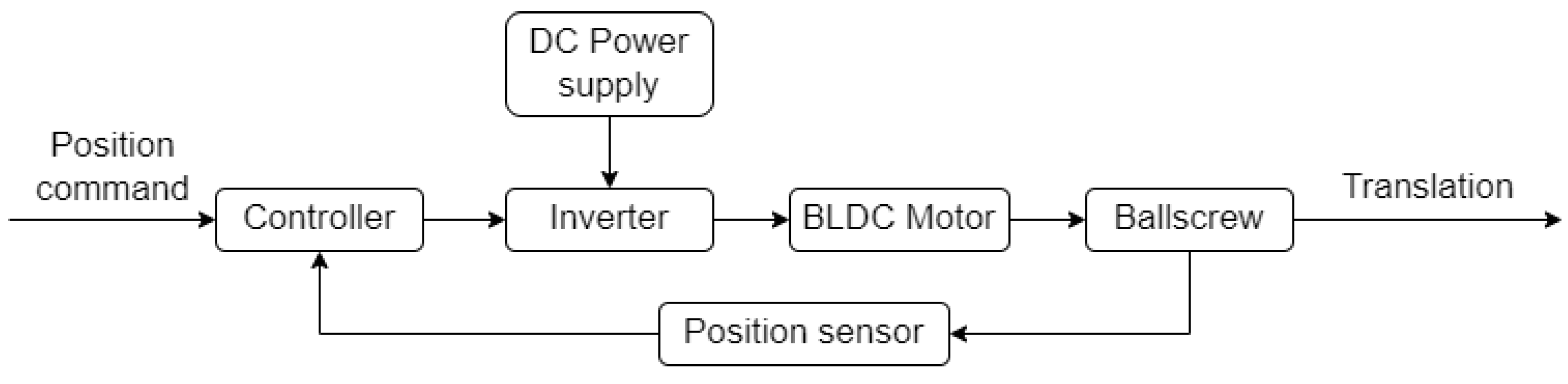
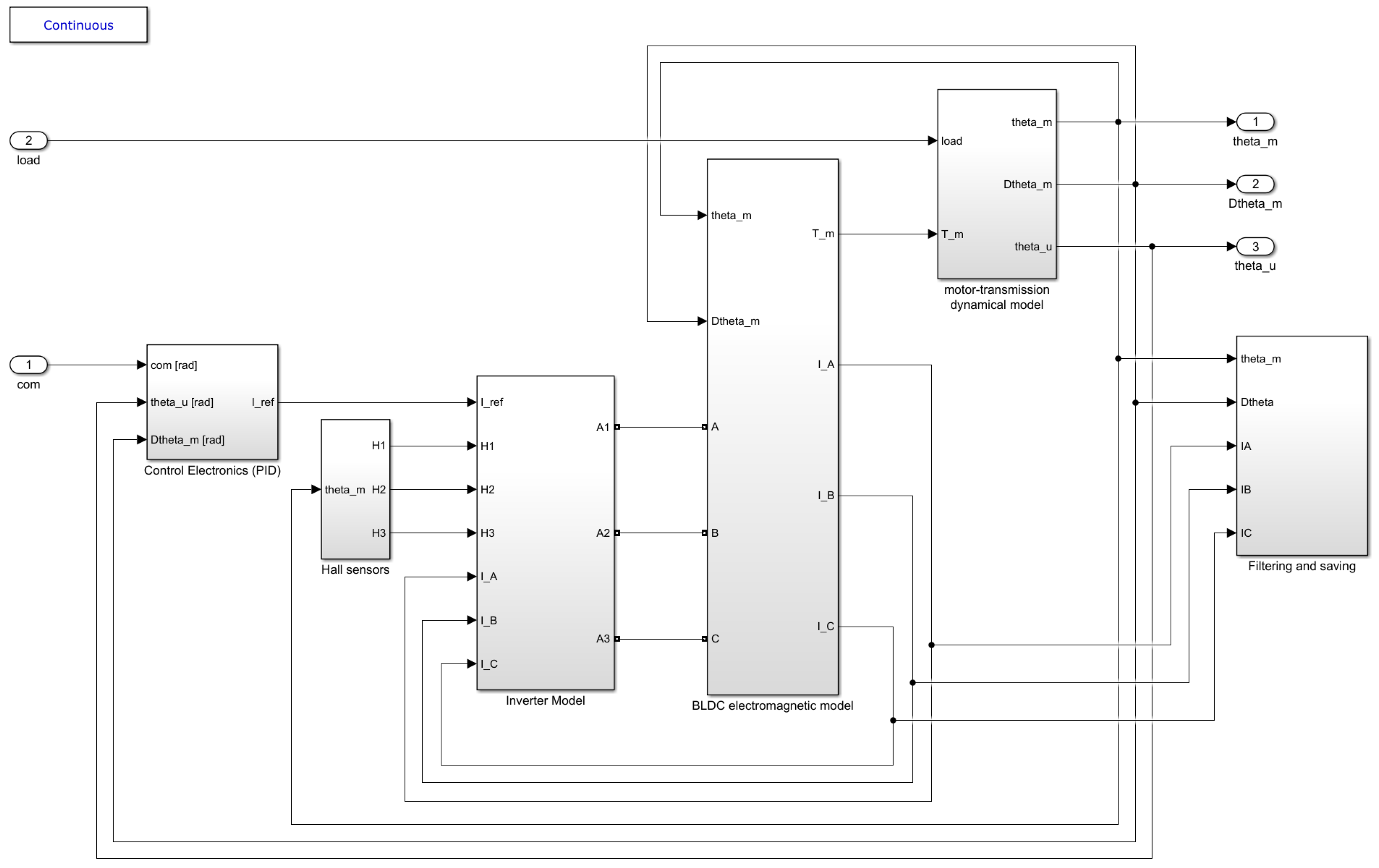
2.2. Brief System Overview
2.3. Dataset Used
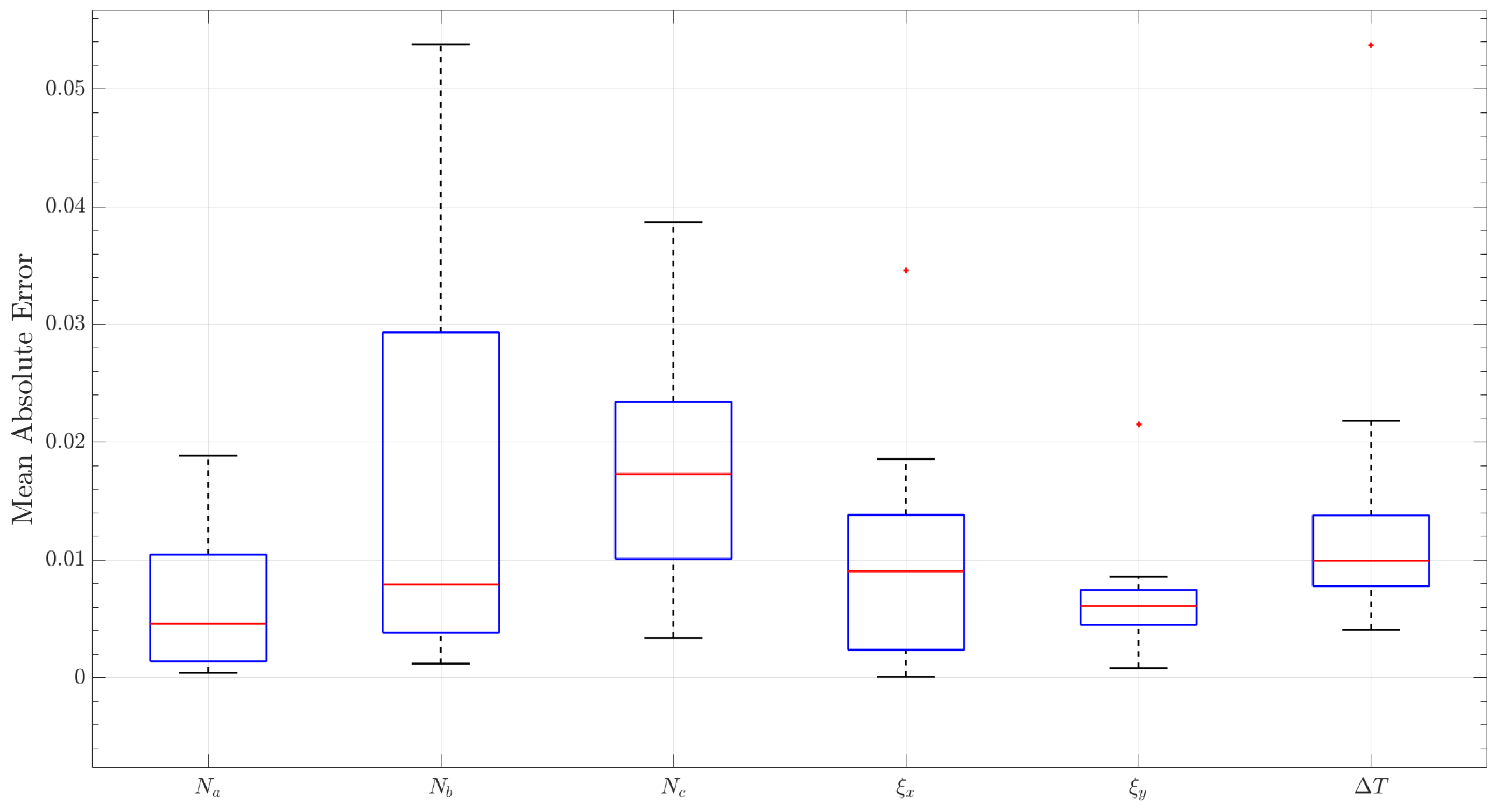
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| BEMF | Back Electro-Motive Force; |
| BLDC | BrushLess Direct Current; |
| EHA | Electrohydrostatic Actuator; |
| EMA | Electro-Mechanical Actuator; |
| FDI | Fault Detection and Identification; |
| PHM | Prognostics and Health Management. |
References
- Quigley, R.E.J. More Electric Aircraft. In Proceedings of the Eighth Annual Applied Power Electronics Conference and Exposition, Long Beach, CA, USA, 17–21 March 2013; pp. 906–911. [Google Scholar] [CrossRef]
- Wheeler, P.; Bozhko, S. The more electric aircraft: Technology and challenges. IEEE Electrif. Mag. 2014, 2, 6–12. [Google Scholar] [CrossRef]
- Balaban, E.; Bansal, P.; Stoelting, P.; Saxena, A.; Goebel, K.F.; Curran, S. A diagnostic approach for electro-mechanical actuators in aerospace systems. In Proceedings of the 2009 IEEE Aerospace Conference, Big Sky, MT, USA, 7–14 March 2009; pp. 1–13. [Google Scholar]
- Van Den Bossche, D. The A380 flight control electrohydrostatic actuators, achievements and lessons learnt. In Proceedings of the 25th International Congress of the Aeronautical Sciences, Hamburg, Germany, 3–8 September 2006; International Council of Aeronautical Sciences (ICAS): Hamburg, Germany, 2006; pp. 1–8. [Google Scholar]
- Botten, S.L.; Whitley, C.R.; King, A.D. Flight control actuation technology for next-generation all-electric aircraft. Technol. Rev. J. 2000, 8, 55–68. [Google Scholar]
- Hussain, Y.M.; Burrow, S.; Henson, L.; Keogh, P. A review of techniques to mitigate jamming in electromechanical actuators for safety critical applications. Int. J. Progn. Health Manag. 2018, 9, 1–11. [Google Scholar] [CrossRef]
- Vachtsevanos, G.J.; Vachtsevanos, G.J. Intelligent Fault Diagnosis and Prognosis for Engineering Systems; Wiley: Hoboken, NJ, USA, 2006; Volume 456. [Google Scholar]
- Tinga, T.; Loendersloot, R. Physical model-based prognostics and health monitoring to enable predictive maintenance. In Predictive Maintenance in Dynamic Systems; Springer: Berlin/Heidelberg, Germany, 2019; pp. 313–353. [Google Scholar]
- Yiwei, W.; Christian, G.; Binaud, N.; Christian, B.; Jian, F. A model-based prognostics method for fatigue crack growth in fuselage panels. Chin. J. Aeronaut. 2019, 32, 396–408. [Google Scholar]
- Di Rito, G.; Luciano, B.; Borgarelli, N.; Nardeschi, M. Model-Based Condition-Monitoring and Jamming-Tolerant Control of an Electro-Mechanical Flight Actuator with Differential Ball Screws. Actuators 2021, 10, 230. [Google Scholar] [CrossRef]
- Ray, A.; Tangirala, S. A nonlinear stochastic model of fatigue crack dynamics. Probabilistic Eng. Mech. 1997, 12, 33–40. [Google Scholar] [CrossRef]
- Swindeman, R.; Swindeman, M. A comparison of creep models for nickel base alloys for advanced energy systems. Int. J. Press. Vessel. Pip. 2008, 85, 72–79. [Google Scholar] [CrossRef]
- Li, X.; Ding, Q.; Sun, J.Q. Remaining useful life estimation in prognostics using deep convolution neural networks. Reliab. Eng. Syst. Saf. 2018, 172, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Guo, L.; Li, N.; Jia, F.; Lei, Y.; Lin, J. A recurrent neural network based health indicator for remaining useful life prediction of bearings. Neurocomputing 2017, 240, 98–109. [Google Scholar] [CrossRef]
- Xia, M.; Zheng, X.; Imran, M.; Shoaib, M. Data-driven prognosis method using hybrid deep recurrent neural network. Appl. Soft Comput. 2020, 93, 106351. [Google Scholar] [CrossRef]
- Al-Dulaimi, A.; Zabihi, S.; Asif, A.; Mohammadi, A. A multimodal and hybrid deep neural network model for Remaining Useful Life estimation. Comput. Ind. 2019, 108, 186–196. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, M.; Zuo, H.; Xie, J. Remaining useful life prognostics for aeroengine based on superstatistics and information fusion. Chin. J. Aeronaut. 2014, 27, 1086–1096. [Google Scholar] [CrossRef] [Green Version]
- Baptista, M.; Henriques, E.M.; de Medeiros, I.P.; Malere, J.P.; Nascimento, C.L., Jr.; Prendinger, H. Remaining useful life estimation in aeronautics: Combining data-driven and Kalman filtering. Reliab. Eng. Syst. Saf. 2019, 184, 228–239. [Google Scholar] [CrossRef]
- Jianzhong, S.; Fangyuan, W.; Shungang, N. Aircraft air conditioning system health state estimation and prediction for predictive maintenance. Chin. J. Aeronaut. 2020, 33, 947–955. [Google Scholar]
- Li, Q.; Gao, Z.; Tang, D.; Li, B. Remaining useful life estimation for deteriorating systems with time-varying operational conditions and condition-specific failure zones. Chin. J. Aeronaut. 2016, 29, 662–674. [Google Scholar] [CrossRef] [Green Version]
- Liu, J.; Wang, W.; Ma, F.; Yang, Y.; Yang, C. A data-model-fusion prognostic framework for dynamic system state forecasting. Eng. Appl. Artif. Intell. 2012, 25, 814–823. [Google Scholar] [CrossRef] [Green Version]
- Wang, B.; Lei, Y.; Li, N.; Li, N. A hybrid prognostics approach for estimating remaining useful life of rolling element bearings. IEEE Trans. Reliab. 2018, 69, 401–412. [Google Scholar] [CrossRef]
- Wang, P.; Long, Z.; Wang, G. A hybrid prognostics approach for estimating remaining useful life of wind turbine bearings. Energy Rep. 2020, 6, 173–182. [Google Scholar] [CrossRef]
- Quattrocchi, G.; Iacono, A.; Berri, P.C.; Dalla Vedova, M.D.; Maggiore, P. A New Method for Friction Estimation in EMA Transmissions. Actuators 2021, 10, 194. [Google Scholar] [CrossRef]
- Quattrocchi, G.; Berri, P.C.; Dalla Vedova, M.D.L.; Maggiore, P. Innovative Actuator Fault Identification Based on Back Electromotive Force Reconstruction. Actuators 2020, 9, 50. [Google Scholar] [CrossRef]
- Berri, P.C.; Dalla Vedova, M.; Maggiore, P. A Lumped Parameter High Fidelity EMA Model for Model-Based Prognostics. In Proceedings of the 29th ESREL, Hannover, Germany, 22–26 September 2019; pp. 22–26. [Google Scholar]
- Belmonte, D.; Dalla Vedova, M.; Maggiore, P. Electromechanical servomechanisms affected by motor static eccentricity: Proposal of fault evaluation algorithm based on spectral analysis techniques. In Safety and Reliability of Complex Engineered Systems, Proceedings of the 25th European Safety and Reliability Conference, ESREL 2015, Zürich, Switzerland, 7–10 September 2015; CRC Press: London, UK, 2015; pp. 2365–2372. [Google Scholar]
- Belmonte, D.; Dalla Vedova, M.; Maggiore, P. Prognostics of Onboard Electromechanical Actuators: A New Approach Based on Spectral Analysis Techniques. Int. Rev. Aerosp. Eng. 2018, 11, 96–103. [Google Scholar] [CrossRef]




Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quattrocchi, G.; Berri, P.C.; Dalla Vedova, M.D.L.; Maggiore, P. An Improved Fault Identification Method for Electromechanical Actuators. Aerospace 2022, 9, 341. https://doi.org/10.3390/aerospace9070341
Quattrocchi G, Berri PC, Dalla Vedova MDL, Maggiore P. An Improved Fault Identification Method for Electromechanical Actuators. Aerospace. 2022; 9(7):341. https://doi.org/10.3390/aerospace9070341
Chicago/Turabian StyleQuattrocchi, Gaetano, Pier C. Berri, Matteo D. L. Dalla Vedova, and Paolo Maggiore. 2022. "An Improved Fault Identification Method for Electromechanical Actuators" Aerospace 9, no. 7: 341. https://doi.org/10.3390/aerospace9070341
APA StyleQuattrocchi, G., Berri, P. C., Dalla Vedova, M. D. L., & Maggiore, P. (2022). An Improved Fault Identification Method for Electromechanical Actuators. Aerospace, 9(7), 341. https://doi.org/10.3390/aerospace9070341