
Fault-Tolerant Control of a Dual-Stator PMSM for the Full-Electric Propulsion of a Lightweight Fixed-Wing UAV



Abstract
1. Introduction
- Take-off weight: from 35 to 50 kg;
- Endurance: >6 h;
- Range: >3 km;
- Take-off system: pneumatic launcher;
- Landing system: parachute and airbags;
- Propulsion system: FEPS powering a twin-blade fixed-pitch propeller;
- Innovative sensing systems:
- ○
- Synthetic aperture radar, to support surveillance missions in adverse environmental conditions;
- ○
- Sense-and-avoid system, integrating a camera with a miniaturised radar, to support autonomous flight capabilities in emergency conditions.
2. Materials and Methods
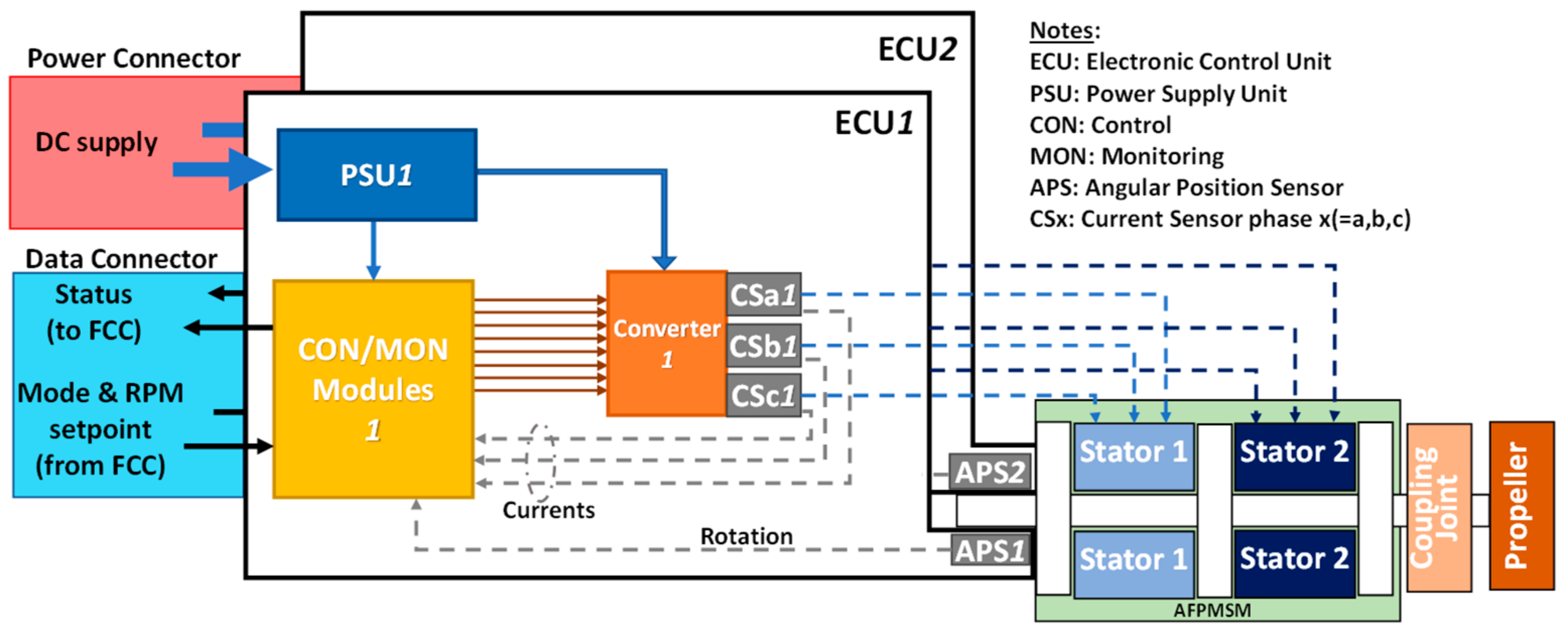
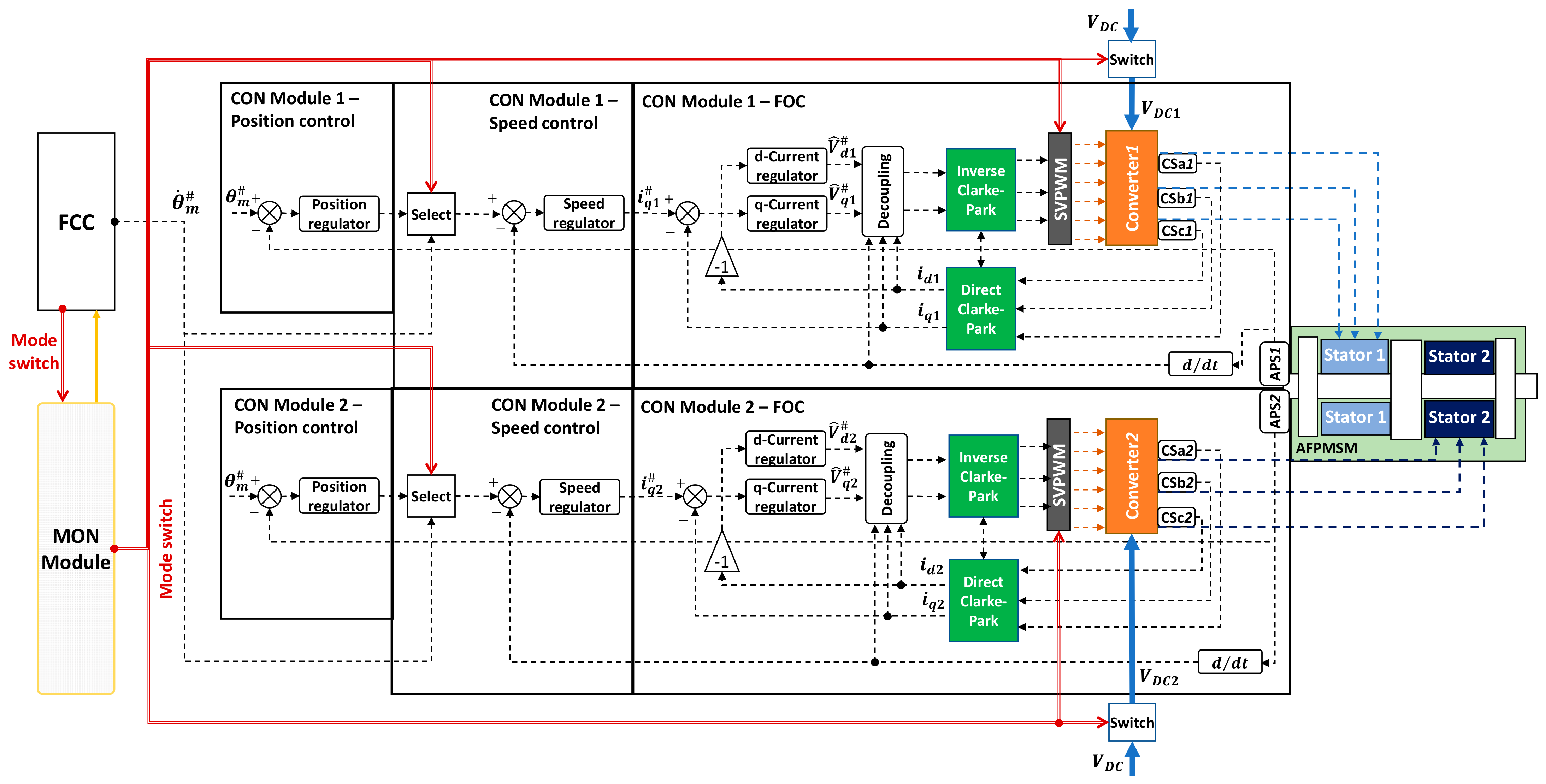
2.1. FEPS Description
- Dual-stator AFPMSM, with surface-mounted magnets and phases in Y connection;
- Twin-blade fixed-pitch propeller (APC22 × 10E model [45]);
- Mechanical coupling joint between motor shaft and propeller;
- Two Electronic Control Units (ECUs), each one including:
- ○
- Control/monitoring (CON/MON) module, for the implementation of the closed-loop control and health-monitoring functions;
- ○
- Conventional three-leg converter;
- ○
- Three Current Sensors (CSa, CSb, CSc), one per each motor phase;
- ○
- Angular Position Sensor (APS), measuring the motor rotation;
- ○
- Power Supply Unit (PSU), providing all ECU components with the required electrical supply;
- Two interface connectors, one for the electrical power input and the other for the data exchange with the Flight Control Computer (FCC).
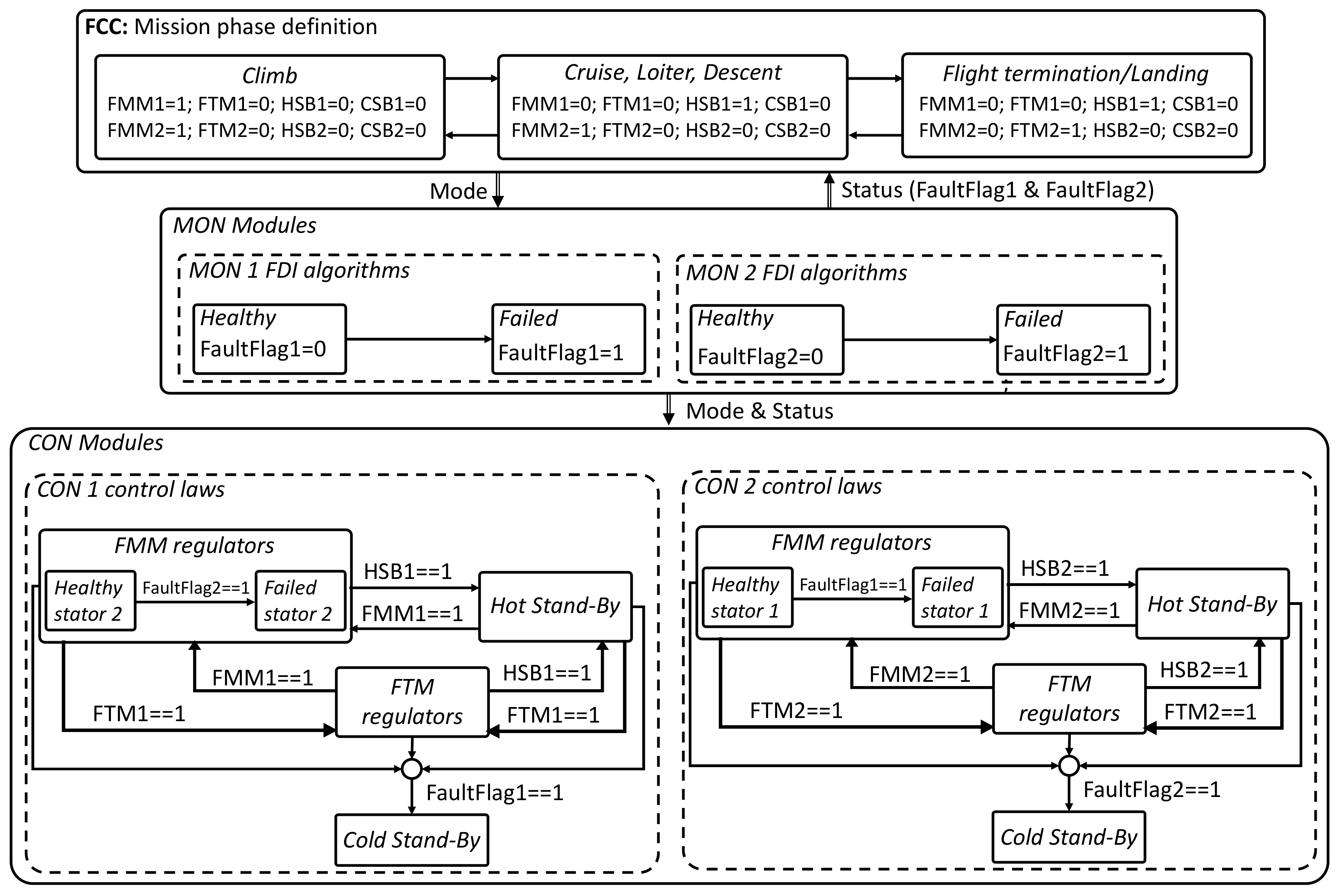
- Be electrically supplied and controlled to apply an electrical torque on the motor shaft (active status);
- Be electrically supplied at the converter level to be prompt to operate, but with open/isolated phases, so that no torque is applied (stand-by status);
- Be de-energized at the converter level (passive status).
- (1)
- Flight Mission Mode (FMM), in which the stator is active and a speed-tracking closed-loop system is implemented, by means of two nested loops, on motor speed and currents (via Field-Oriented Control, FOC), respectively;
- (2)
- Flight Termination Mode (FTM), in which the stator is active and controlled via three nested loops: the two ones of the FMM plus an outer loop on motor shaft rotation, with a predefined setpoint for the propeller alignment;
- (3)
- Hot Stand-By (HSB), in which the stator is in stand-by status;
- (4)
- Cold Stand-By (CSB), in which the stator is passive.
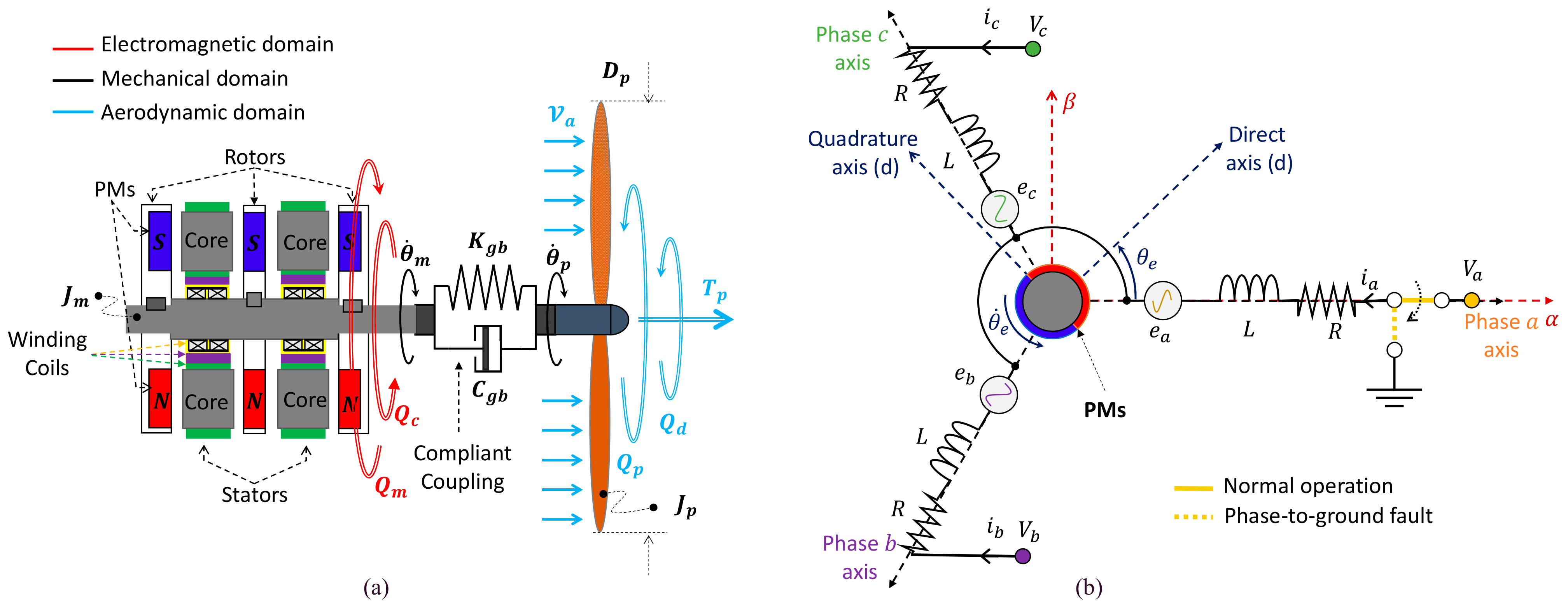
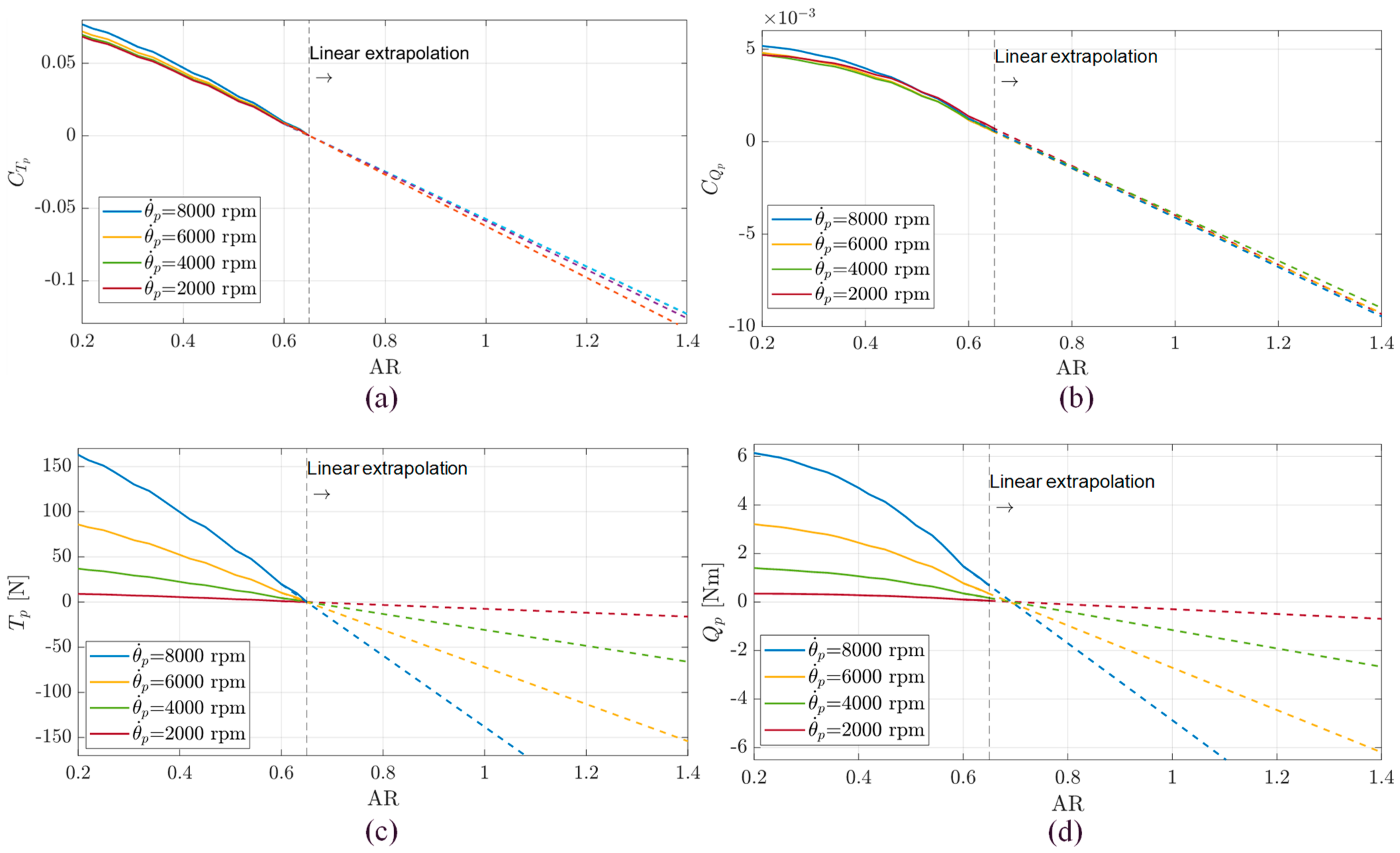
2.2. Mechanical Transmission and Propeller Loads Modelling
2.3. Three-Phase PMSM Modelling
- Negligible magnetic nonlinearities of ferromagnetic parts (i.e., hysteresis, saturation);
- Each stator–rotor module is magnetically symmetric with reference to phases;
- Permanent magnets are surface-mounted, are made of rare-earth materials, and the magnet reluctance along the quadrature axis is infinite with respect to the one along the direct axis;
- Negligible magnetic coupling among phases;
- Negligible magnetic flux dispersions (i.e., secondary paths, iron losses).
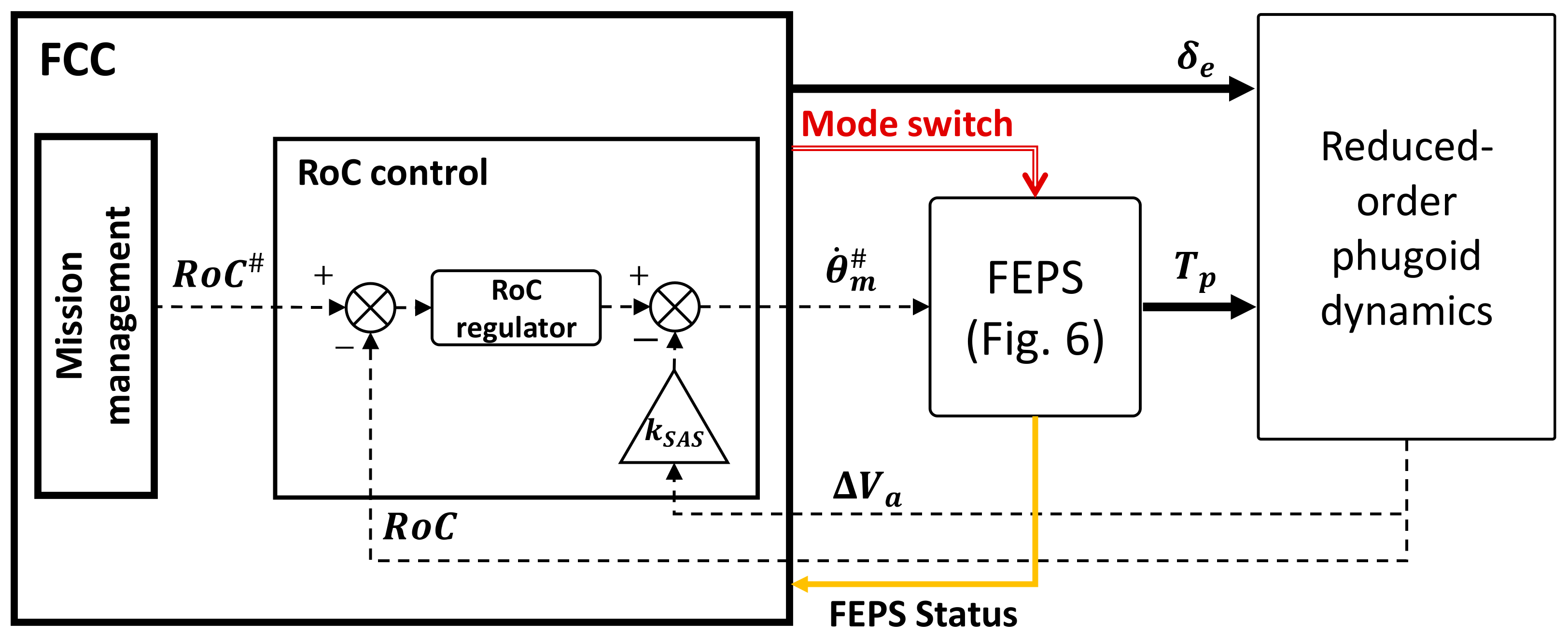
2.4. Fault-Tolerant Control System Design
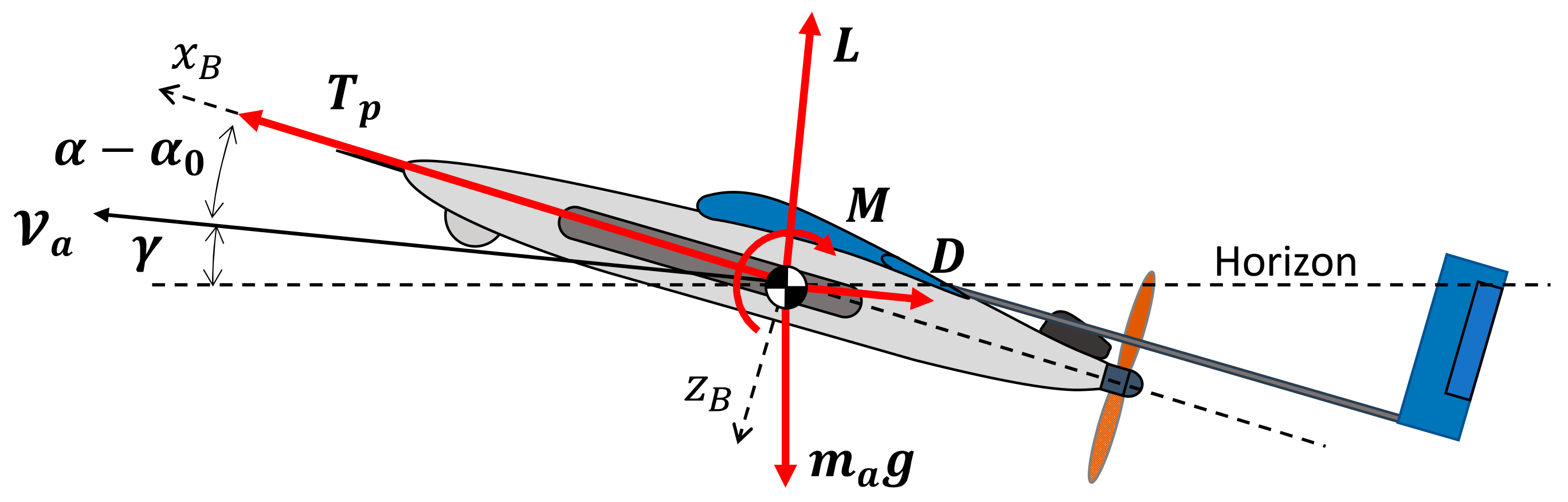
2.5. UAV Longitudinal Dynamics Modelling
- The thrust is aligned with the body frame axis ();
- The aerodynamic coefficients related to the wing downwash and to the pitch rate are negligible;
- The elevator deflection () continuously implies the pitch equilibrium;
- The angle-of-attack, the path angle and the elevator deflection are small quantities.
3. Results
3.1. Simulation Campaign Definition
- During climb, in which the MON modules detect the fault and switch the CON modules to operate from FMM/FMM (normal operation) to FMM/CSB (fail-operative);
- During cruise, in which the MON modules detect the fault and switch the CON modules to operate from HSB/FMM (normal operation) to FMM/CSB (fail-operative);
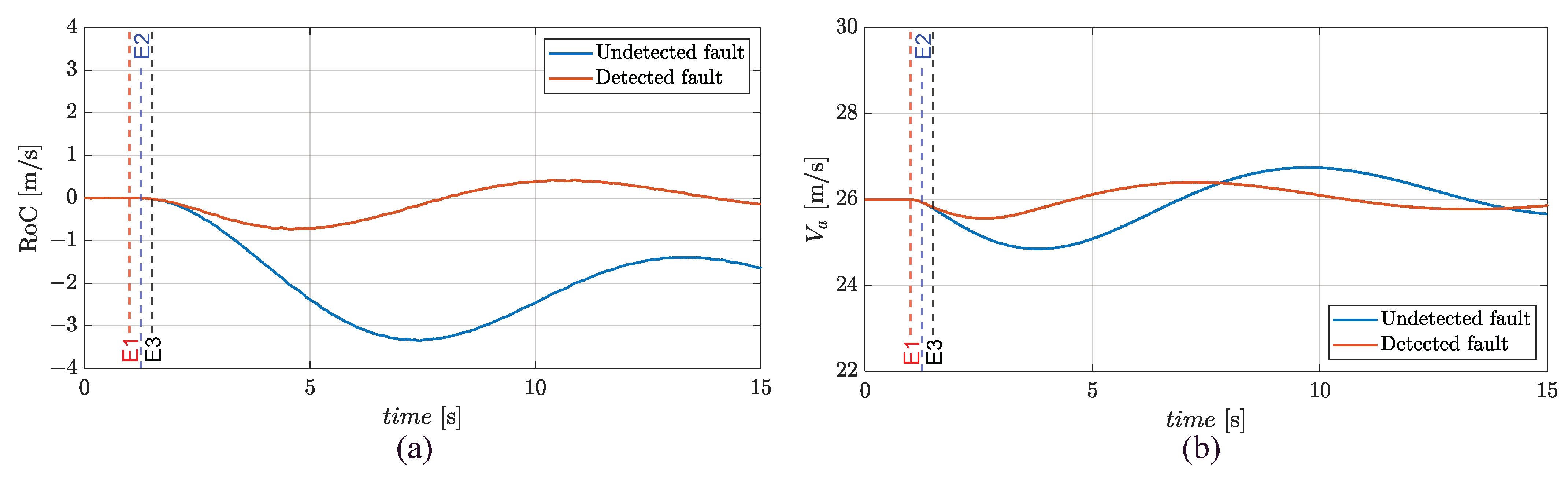
- During flight termination/landing, in which the MON modules firstly detect the fault and switch the CON modules to operate from HSB/FMM (normal operation) to FMM/CSB (fail-operative), and then impose the transition from FMM to FTM on the active stator when the speed is adequately small.All the tests are executed by simulating the following sequence of events:
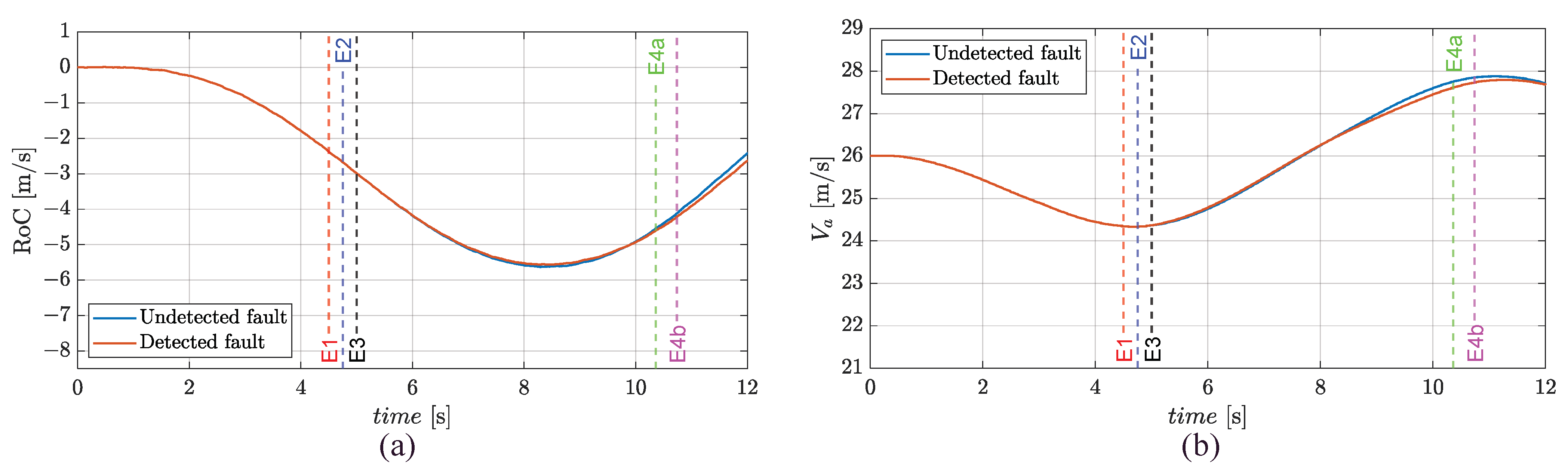
- Start (t = 0 s): the FEPS works in normal operation (no faults) and drives the propeller at 5800 rpm with the UAV at 26 m/s in level flight at sea altitude;
- FEPS command (t = 1 s), i.e.,
- ○
- For climb, the maximum RoC of 3.5 m/s is requested by the FCC;
- ○
- For cruise, the propeller speed setpoint is held;
- ○
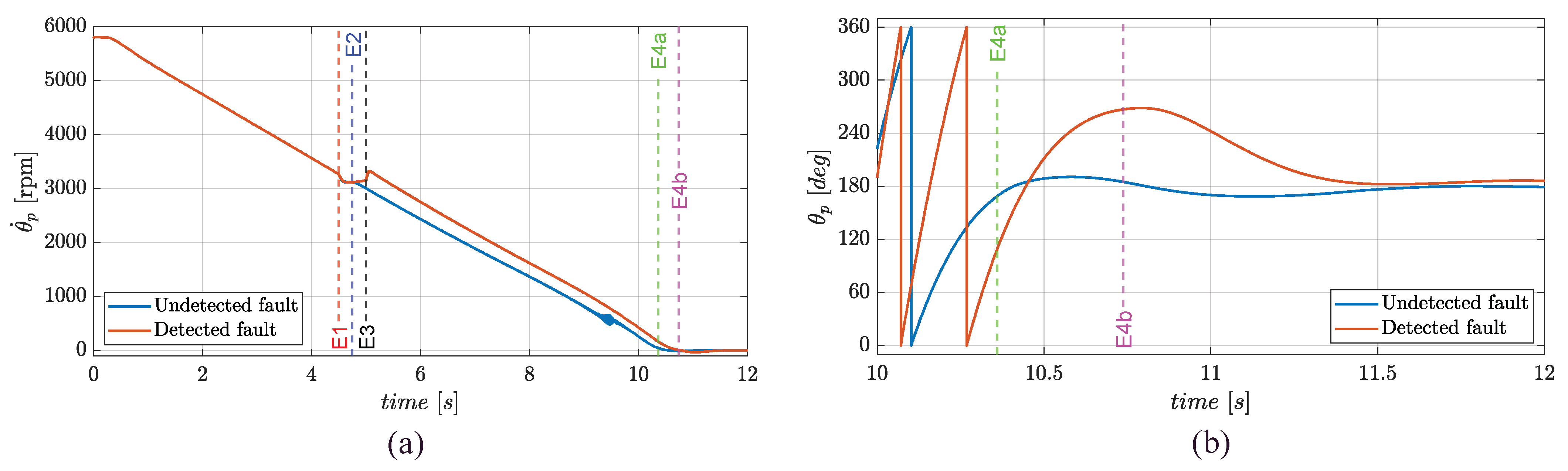
- For flight termination/landing, the propeller speed setpoint is decreased from the cruise value at a −60 rad/s2 rate;
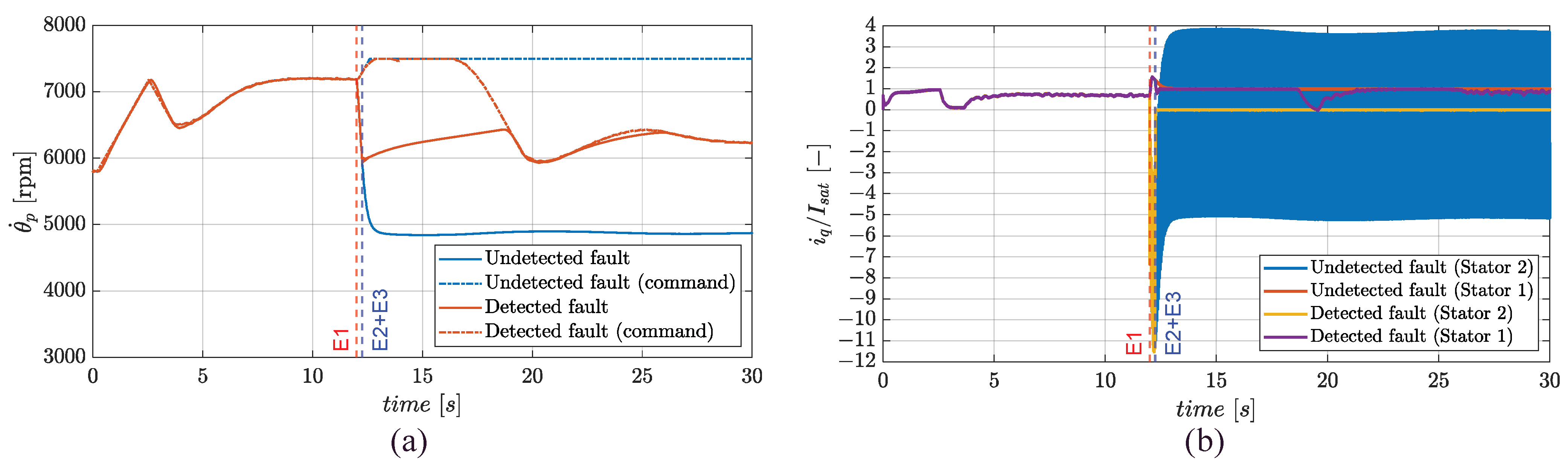
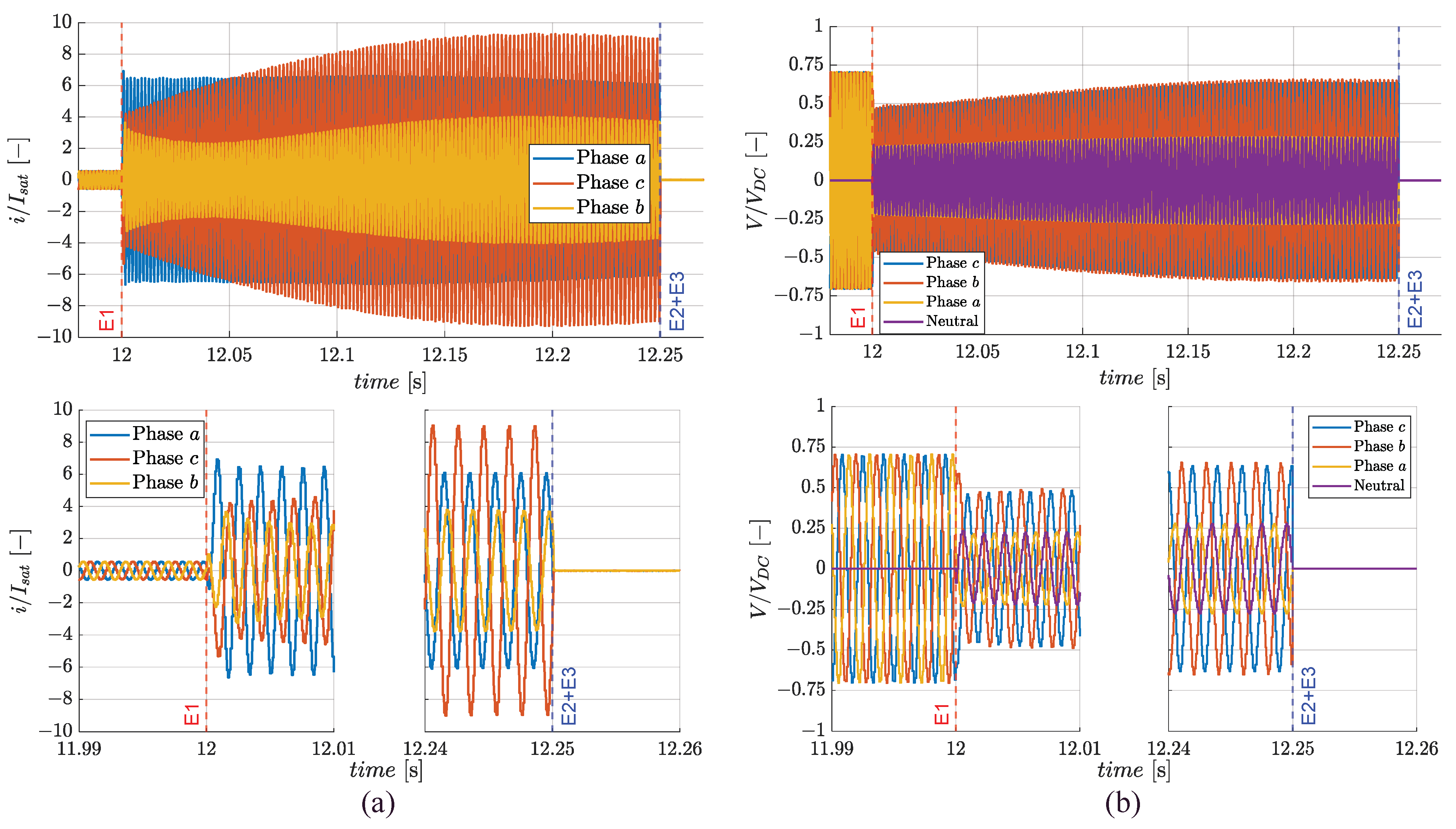
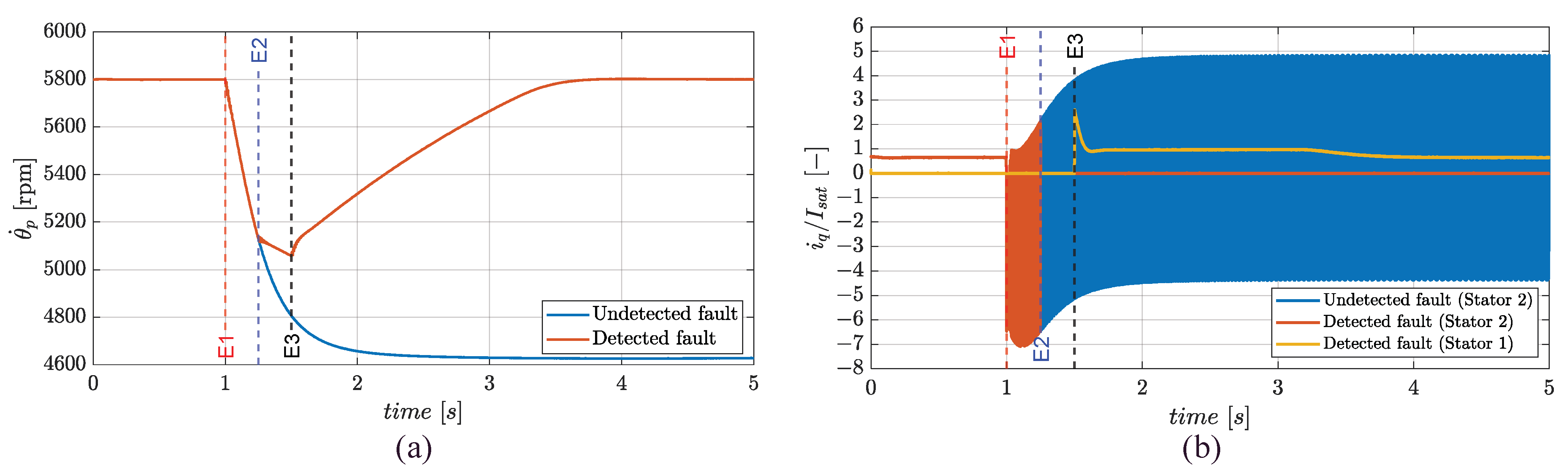
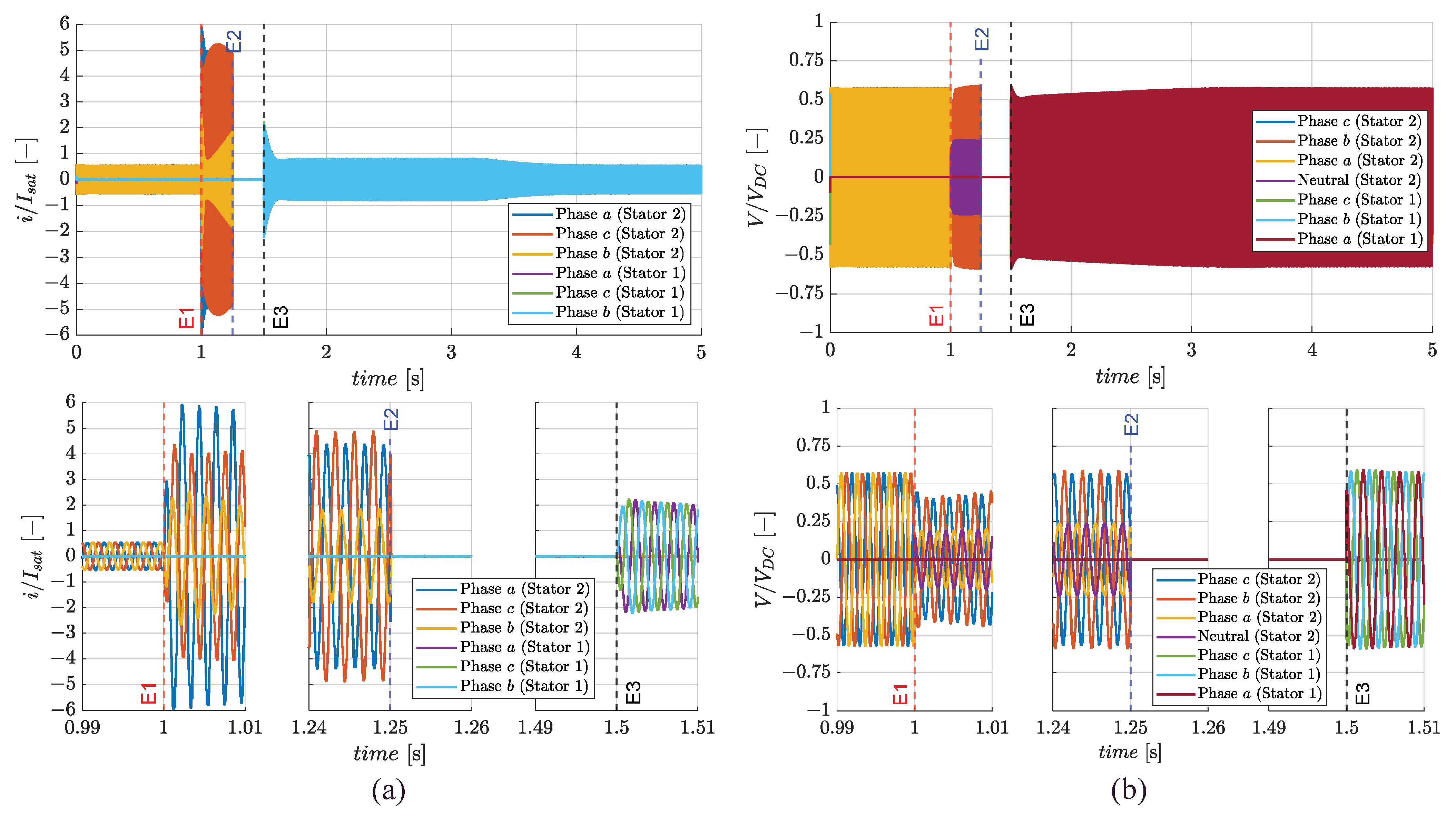
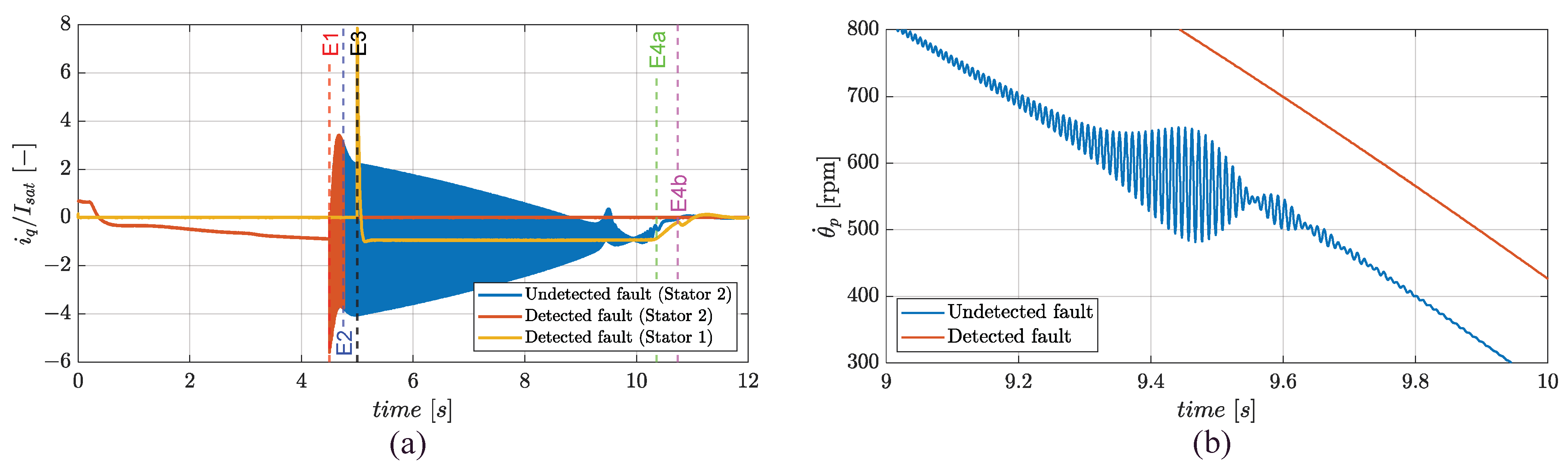
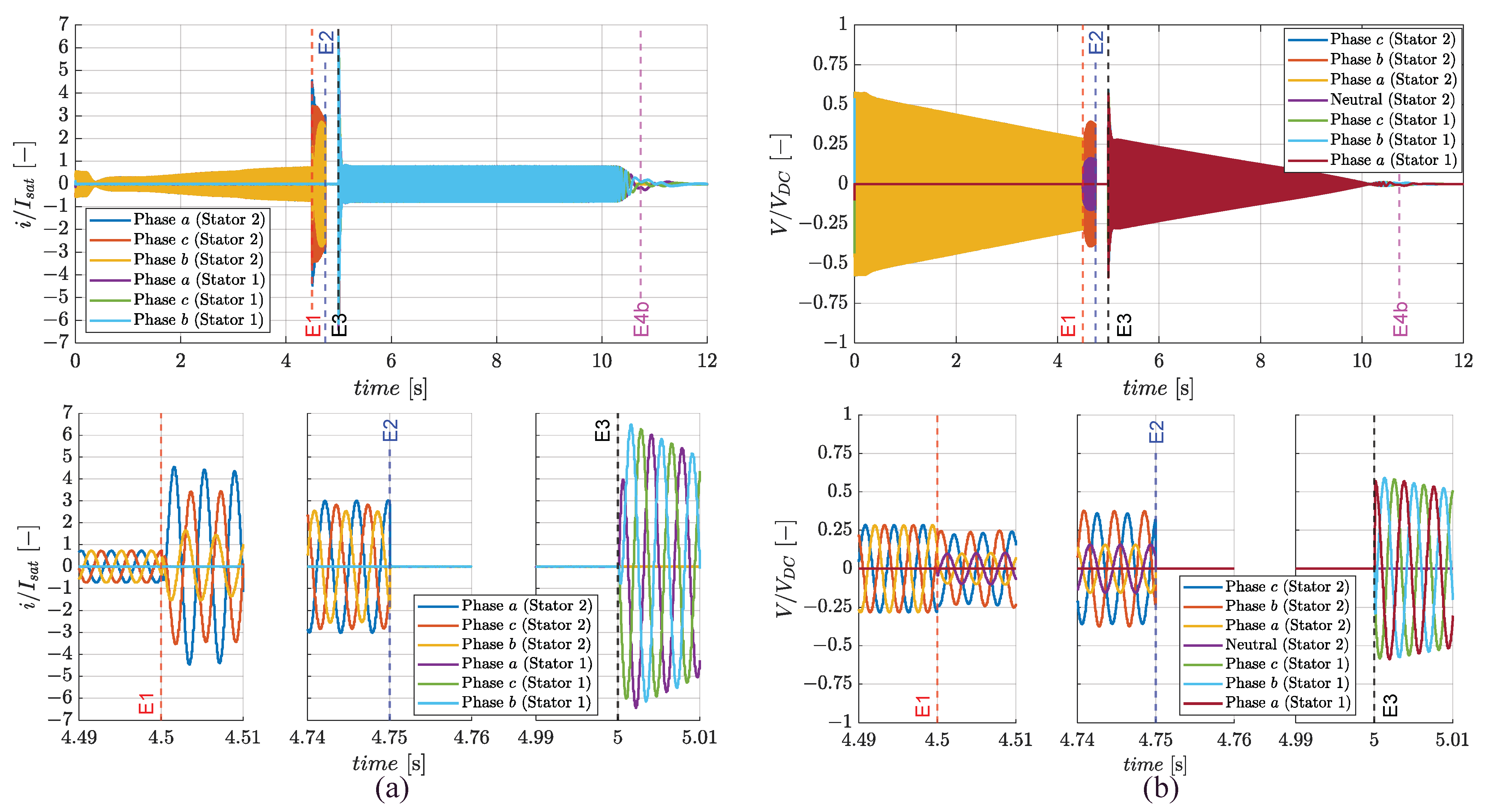
- Event 1 (E1, fault injection): a phase-to-ground fault on phase a of stator 2 is imposed;
- Event 2 (E2, fault detection and isolation): a CSB mode is set on the faulty stator;
- Event 3 (E3, fault compensation):
- ○
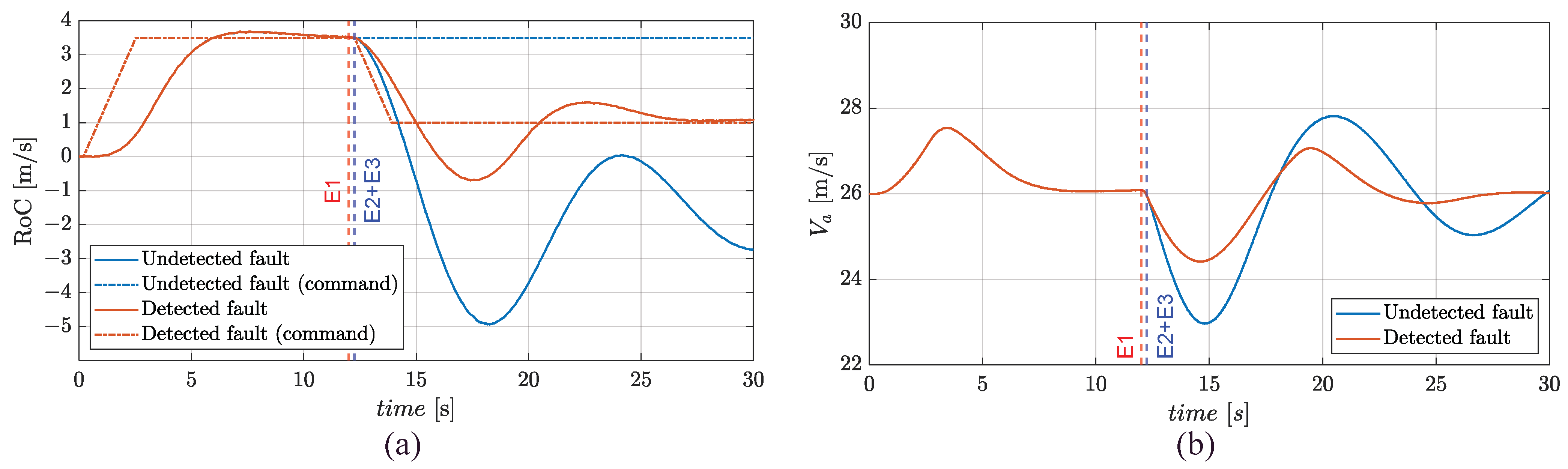
- For climb, the current demand for the healthy stator is doubled and the RoC setpoint is reduced to 1 m/s;
- ○
- For cruise and flight termination/landing, the healthy stator is activated (250 ms delay is assumed to achieve the full electric supply) and controlled;
- Event 4 (E4, only for flight termination/landing): the active stator is switched to operate from FMM to FTM.
3.2. Failure Transients in Climb
3.3. Failure Transients in Cruise
3.4. Failure Transient and Transition from FMM to FTM in Flight Termination/Landing
4. Discussion
- System modelling validation, in particular:
- ○
- AFPMSM model, via experimental testing with reference to normal operation (failure transient characterisation will be always simulated, but using updated parameters);
- ○
- Propeller loads model, via CFD simulations, with special focus on the region of AR > 0.65 (no data from manufacturer);
- ○
- Mechanical drivetrain model, via experimental testing;
- ○
- UAV longitudinal dynamics, via flight data.
- System modelling enhancement, by including a thermal model of the motor that would permit assessing the effects of overcurrents caused by phase-to-ground fault, which are expected to determine severe overheating;
- Control system implementation in the ECU boards, via automatic MATLAB compilers for the “real-time” execution at a 10 kHz sampling rate.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Definition | Symbol | Value | Unit |
|---|---|---|---|
| Stator phase resistance | R | 0.025 | Ω |
| Stator phase inductance single module | L | 2 × 10−5 | H |
| Pole pairs number | nd | 5 | - |
| Torque constant (single stator) | kt | 0.06 | Nm/Arms |
| Back-electromotive force constant | ke | 0.018 | V/(rad/s) |
| Permanent magnet flux linkage | λm | 0.008 | Wb |
| Maximum current (continuous duty cycle) | Isat | 46 | Arms |
| Voltage supply | VDC | 36 | V |
| Rotor inertia | Jem | 8.2 × 10−3 | kg·m2 |
| Propeller diameter | Dp | 0.5588 | m |
| Propeller inertia | Jp | 1.62 × 10−2 | kg·m2 |
| Joint stiffness | Kgb | 1.598 × 103 | Nm/rad |
| Joint damping | Cgb | 0.2545 | Nm/(rad/s) |
| Definition | Symbol | Value | Unit |
|---|---|---|---|
| UAV mass | 35 | kg | |
| Air density | ISA model | kg/m3 | |
| Reference wing area | 1.058 | m2 | |
| Mean aerodynamic chord | 0.303 | m | |
| Lift–slope coefficient due to AoA | 5.74 | 1/rad | |
| Lift–slope coefficient due to elevator deflection | 0.56 | 1/rad | |
| Pitch moment-slope coefficient due to AoA | , | −1.1 | 1/rad |
| Pitch moment-slope coefficient due to elevator deflection | −2.4 | 1/rad | |
| Zero-lift pitch moment coefficient | 0.36 | - | |
| Zero-lift angle | 3.5 | deg | |
| Zero-lift drag coefficient | 0.0491 | - | |
| Induced drag factor | k | 0.0462 | - |
| Definition | Symbol | Value | Unit |
|---|---|---|---|
| Proportional gain of current regulator | 4 × 10−4 | V/A | |
| Integral gain of current regulator | 0.8 | V/A/s | |
| Anti-windup gain of current regulator | 3140 | A/V | |
| Saturation limit of current regulator | 32 | V | |
| Proportional gain of speed regulator | 5 | A s/rad | |
| Integral gain of speed regulator | 15 | A/rad | |
| Anti-windup gain of speed regulator | 314 | A rad/s | |
| Saturation limit of speed regulator | 46 | Arms | |
| Proportional gain of rotation regulator | 1.9 | 1/s | |
| Integral gain of rotation regulator | 0.19 | 1/s2 | |
| Anti-windup gain of rotation regulator | 31.4 | s | |
| Saturation limit of rotation regulator | 785 | rad/s | |
| Proportional gain of RoC regulator | 65.6 | rad/m | |
| Integral gain of RoC regulator | 1.6 | rad s/m | |
| Anti-windup gain of RoC regulator | 10 | m/rad | |
| RoC-loop SAS gain | 100 | rad/m | |
| FEPS sample time | 10−4 | s | |
| FCC sample time | 10−3 | s |
References
- Unmanned Aerial Vehicle (UAV) Market by Point of Sale, Systems, Platform (Civil & Commercial, and Defense & Government), Function, End Use, Application, Type, Mode of Operation, MTOW, Range, and Region—Global Forecast to 2026. Research and Markets: Northbrook, IL, USA. 2021. Available online: https://www.marketsandmarkets.com/Market-Reports/unmanned-aerial-vehicles-uav-market-662.html?gclid=CjwKCAjwrqqSBhBbEiwAlQeqGiTZXREsmSFhSPuOaugcttjxTwo4L3KX7xYtWCycLbFVNWB6YuJIDhoC7ksQAvD_BwE (accessed on 4 April 2022).
- Schlachter, F. Has the Battery Bubble Burst? Am. Phys. Soc. 2012, 21, 8. Available online: https://www.aps.org/publications/apsnews/201208/backpage.cfm (accessed on 2 April 2022).
- Suti, A.; Di Rito, G.; Galatolo, R. Climbing performance enhancement of small fixed-wing UAVs via hybrid electric propulsion. In Proceedings of the 2021 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Modena, Italy, 8–9 April 2021. [Google Scholar] [CrossRef]
- Power, Electric Motor Market. Fortune Business Insights. Available online: https://www.fortunebusinessinsights.com/industry-reports/electric-motor-market-100752 (accessed on 4 April 2022).
- Dipartimento di Ingegneria Civile e Industriale, Progetti istituzionali. TERSA (Tecnologie Elettriche e Radar per Sistemi aeromobili a pilotaggio remoto Autonomi). Available online: https://dici.unipi.it/ricerca/progetti-finanziati/tersa/ (accessed on 7 April 2022).
- Mamen, A.; Supatti, U. A survey of hybrid energy storage systems applied for intermittent renewable energy systems. In Proceedings of the 2017 14th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Phuket, Thailand, 27–30 June 2017. [Google Scholar] [CrossRef]
- Cao, W.; Mecrow, B.; Atkinson, G.; Bennett, J.; Atkinson, D. Overview of Electric Motor Technologies Used for More Electric Aircraft (MEA). IEEE Trans. Ind. Electron. 2012, 59, 3523–3531. [Google Scholar] [CrossRef]
- Suti, A.; Di Rito, G.; Galatolo, R. Fault-Tolerant Control of a Three-Phase Permanent Magnet Synchronous Motor for Lightweight UAV Propellers via Central Point Drive. Actuators 2021, 10, 253. [Google Scholar] [CrossRef]
- NATO Standardization Agency. STANAG 4671—Standardization Agreement—Unmanned Aerial Vehicles Systems Airworthiness Requirements (USAR); NATO Standardization Agency (STANAG): Brussels, Belgium, 2009. [Google Scholar]
- Ryu, H.M.; Kim, J.W.; Sul, S.K. Synchronous-frame current control of multiphase synchronous motor under asymmetric fault condition due to open phases. IEEE Trans. Ind. Appl. 2006, 42, 1062–1070. [Google Scholar] [CrossRef]
- Liu, G.; Lin, Z.; Zhao, W.; Chen, Q.; Xu, G. Third Harmonic Current Injection in Fault-Tolerant Five-Phase Permanent-Magnet Motor Drive. IEEE Trans. Power Electron. 2018, 33, 6970–6979. [Google Scholar] [CrossRef]
- Bennet, J.; Mecrow, B.; Atkinson, D.; Atkinson, G. Safety-critical design of electromechanical actuation systems in commercial aircraft. IET Electr. Power Appl. 2011, 5, 37–47. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Di Rito, G.; Previdi, F. Fault Diagnosis and Condition Monitoring Approaches. In Electro-Mechanical Actuators for the More Electric Aircraft; Springer: Cham, Switzerland, 2021; pp. 87–117. [Google Scholar]
- De Rossiter Correa, M.; Jacobina, C.; Da Silva, E.; Lima, A. An induction motor drive system with improved fault tolerance. IEEE Trans. Ind. Appl. 2001, 37, 873–879. [Google Scholar] [CrossRef]
- Ribeiro, R.; Jacobina, C.; Lima, A.; da Silva, E. A strategy for improving reliability of motor drive systems using a four-leg three-phase converter. In Proceedings of the APEC 2001, Sixteenth Annual IEEE Applied Power Electronics Conference and Exposition (Cat. No. 01CH37181), Anaheim, CA, USA, 4–8 March 2001. [Google Scholar] [CrossRef]
- Zhang, R.; Prasad, V.H.; Boroyevich, D.; Lee, F.J. Three-Dimensional Space Vector Modulation for Four-Leg Voltage-Cource Converter. IEEE Trans. Power Electron. 2002, 17, 314–326. [Google Scholar] [CrossRef]
- Kontarcek, A.; Bajec, P.; Nemec, M.; Ambrožic, V.; Nedeljkovic, D. Cost-Effective Three-Phase PMSM Drive Tolerant to Open-Phase Fault. IEEE Trans. Ind. Electron. 2015, 62, 6708–6718. [Google Scholar] [CrossRef]
- Bonnet, A.; Soukup, G. Cause and analysis of stator and rotor failures in three-phase squirrel-cage induction motors. IEEE Trans. Ind. Appl. 1992, 28, 921–937. [Google Scholar] [CrossRef]
- Khalaief, A.; Boussank, M.; Gossa, M. Open phase faults detection in PMSM drives based on current signature analysis. In Proceedings of the XIX International Conference on Electrical Machines (ICEM 2010), Roma, Italy, 6–8 September 2010. [Google Scholar] [CrossRef]
- Li, W.; Tang, H.; Luo, S.; Yan, X.; Wu, Z. Comparative analysis of the operating performance, magnetic field, and temperature rise of the three-phase permanent magnet synchronous motor with or without fault-tolerant control under single-phase open-circuit fault. IET Electr. Power Appl. 2021, 15, 861–872. [Google Scholar] [CrossRef]
- Zhou, X.; Sun, J.; Li, H.; Song, X. High Performance Three-Phase PMSM Open-Phase Fault-Tolerant Method Based on Reference Frame Transformation. IEEE Trans. Ind. Electron. 2019, 66, 7571–7580. [Google Scholar] [CrossRef]
- Faiz, J.; Nejadi-Koti, H.; Valipour, Z. Comprehensive review on inter-turn fault indexes in permanent magnet motors. IET Electr. Power Appl. 2017, 11, 142–156. [Google Scholar] [CrossRef]
- Krzysztofiak, M.; Skowron, M.; Orlowska-Kowalska, T. Analysis of the Impact of Stator Inter-Turn Short Circuits on PMSM Drive with Scalar and Vector Control. Energies 2021, 14, 153. [Google Scholar] [CrossRef]
- Arabaci, H.; Bilgin, O. The Detection of Rotor Faults By Using Short Time Fourier Transform. In Proceedings of the 2007 IEEE 15th Signal Processing and Communications Applications, Eskisehir, Turkey, 11–13 June 2007. [Google Scholar] [CrossRef]
- Mohammed, O.A.; Liu, Z.; Liu, S.; Abed, N.Y. Internal Short Circuit Fault Diagnosis for PM Machines Using FE-Based Phase Variable Model and Wavelets Analysis. IEEE Trans. Magn. 2007, 43, 1729–1732. [Google Scholar] [CrossRef]
- Baggu, M.M.; Chowdhury, B.H. Implementation of a Converter in Sequence Domain to Counter Voltage Imbalances. In Proceedings of the 2007 IEEE Power Engineering Society General Meeting, Tampa, FL, USA, 24–28 June 2007. [Google Scholar] [CrossRef]
- Blánquez, F.R.; Aranda, M.; Rebollo, E.; Blázquez, F.; Platero, C.A. New Fault-Resistance Estimation Algorithm for Rotor-Winding Ground-Fault Online Location in Synchronous Machines With Static Excitation. IEEE Trans. Ind. Electron. 2015, 62, 1901–1911. [Google Scholar] [CrossRef][Green Version]
- Tan, R.H.; Ramachandaramurthy, V.K. A Comprehensive Modeling and Simulation of Power Quality Disturbances Using MATLAB/SIMULINK. In Power Quality Issues in Distributed Generation; Luszcz, J., Ed.; IntechOpen: London, UK, 2015. [Google Scholar] [CrossRef]
- Pietrzak, P.; Wolkiewicz, M. On-line Detection and Classification of PMSM Stator Winding Faults Based on Stator Current Symmetrical Components Analysis and the KNN Algorithm. Electronics 2021, 10, 1786. [Google Scholar] [CrossRef]
- Fourlas, G.K.; Karras, G.C. A Survey on Fault Diagnosis and Fault-Tolerant Control Methods for Unmanned Aerial Vehicles. Machines 2021, 9, 197. [Google Scholar] [CrossRef]
- Freeman, P.; Pandita, R.; Srivastava, N.; Balas, G.J. Model-Based and Data-Driven Fault Detection Performance for Small UAV. IEEE/ASME Trans. Mechatron. 2013, 18, 1300–1309. [Google Scholar] [CrossRef]
- Odendaal, H.M.; Jones, T. Actuator fault detection and isolation: An optimised parity space approach. Control. Eng. Pract. 2014, 26, 222–232. [Google Scholar] [CrossRef]
- Cao, D.; Fu, J.; Li, Y. Fault diagnosis of actuator of Flight Control System based on analytic model (IEEE CGNCC). In Proceedings of the 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, 12–14 August 2016. [Google Scholar] [CrossRef]
- Abbaspour, A.; Yen, K.k.; Forouzannezhad, P.; Sargolzaei, A. A Neural Adaptive Approach for Active Fault-Tolerant Control Design in UAV. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 3401–3411. [Google Scholar] [CrossRef]
- Yin, L.; Liu, J.; Yang, P. Interval Observer-based Fault Detection for UAVs Formation with Actuator Faults. In Proceedings of the 2019 CAA Symposium on Fault Detection, Supervision and Safety for Technical Processes (SAFEPROCESS), Xiamen, China, 5–7 July 2019. [Google Scholar] [CrossRef]
- Li, D.; Yang, P.; Liu, Z.; Liu, J. Fault Diagnosis for Distributed UAVs Formation Based on Unknown Input Observer. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019. [Google Scholar] [CrossRef]
- Yu, Z.; Liu, Z.; Zhang, Y.; Qu, Y.; Su, C.Y. Distributed Finite-Time Fault-Tolerant Containment Control for Multiple Unmanned Aerial Vehicles. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 2077–2091. [Google Scholar] [CrossRef]
- Zogopoulos-Papaliakos, G.; Karras, G.C.; Kyriakopoulos, K.J. A Fault-Tolerant Control Scheme for Fixed-Wing UAVs with Flight Envelope Awareness. J. Intell. Robot. Syst. 2021, 102, 46. [Google Scholar] [CrossRef]
- Haaland, O.M.; Wenz, A.W.; Gryte, K.; Hann, R.; Johansen, T.A. Detection and Isolation of Propeller Icing and Electric Propulsion System Faults in Fixed-Wing UAVs. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021. [Google Scholar] [CrossRef]
- Huang, R.; Liu, C.; Song, Z.; Zhao, H. Design and Analysis of a Novel Axial-Radial Flux Permanent Magnet Machine with Halbach-Array Permanent Magnets. Energies 2021, 14, 3639. [Google Scholar] [CrossRef]
- Mahmoudi, A.; Rahim, N.A.; Hew, W.P. Axial-flux permanent-magnet machine modeling, design, simulation and analysis. Sci. Res. Essays 2011, 6, 2525–2549. [Google Scholar] [CrossRef]
- Zhao, J.; Han, Q.; Dai, Y.; Hua, M. Study on the Electromagnetic Design and Analysis of Axial Flux Permanent Magnet Synchronous Motors for Electric Vehicles. Energies 2019, 12, 3451. [Google Scholar] [CrossRef]
- Kahourzade, S.; Mahmoudi, A.; Ping, H.W.; Mahmoudi, N.U. A Comprehensive Review of Axial-Flux Permanent-Magnet Machines. Can. J. Electr. Comput. Eng. 2014, 37, 19–33. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, J.; Cheng, M. Fault tolerant control of double-stator-winding PMSM for open phase operation based on asymmetric current injection. In Proceedings of the 17th International Conference on Electrical Machines and Systems (ICEMS), Hangzhou, China, 22–25 October 2014. [Google Scholar] [CrossRef]
- APC Propellers TECHNICAL INFO. Available online: https://www.apcprop.com/technical-information/performance-data/ (accessed on 2 May 2021).
- Gong, A.; Verstraete, D. Evaluation of a hybrid fuel-cell based propulsion system with a hardware-in-the-loop flight simulator. In Proceedings of the ISABE, Manchester, UK, 3–8 September 2017; Available online: https://www.researchgate.net/publication/320998946_Evaluation_of_a_hybrid_fuel-cell_based_propulsion_system_with_a_hardware-in-the-loop_flight_simulator (accessed on 28 March 2022).
- Pivano, L.; Smogeli, O.N.; Fossen, T.I.; Johansen, T.A. Experimental Validation of a marine propeller thrust estimation scheme. Nor. Soc. Autom. Control 2007, 28, 105–112. [Google Scholar] [CrossRef][Green Version]
- Darba, A.; Esmalifalak, M.; Barazandeh, E.S. Implementing SVPWM technique to axial flux permanent magnet synchronous motor drive with internal model current controller. In Proceedings of the 2010 4th International Power Engineering and Optimization Conference (PEOCO), Shah Alam, Malaysia, 23–24 June 2010. [Google Scholar] [CrossRef]
- Sabah, N.; Humod, A.T.; Hasan, F.A. Field Oriented Control of the Axial Flux PMSM Based On Multi-Objective Particle Swarm Optimization. Technol. Rep. Kansai Univ. 2020, 62, 1493. Available online: https://www.kansaiuniversityreports.com/article/field-oriented-control-of-the-axial-flux-pmsm-based-on-multi-objective-particle-swarm-optimization (accessed on 1 April 2022).
- Rosario-Gabriel, I.; Cortés, R.H. Aircraft Longitudinal Control based on the Lanchester’s Phugoid Dynamics Model. In Proceedings of the 2018 International Conference on Unmanned Aircraft Systems (ICUAS), Dallas, TX, USA, 12–15 June 2018. [Google Scholar] [CrossRef]
- Lanchester, F.W. Aerial Flight: Part 2, Aerodonetics; A Constable: London, UK, 1908. [Google Scholar]


















| Mission Phase | MON1 Fault Flag | MON2 Fault Flag | CON Mode (CON1/CON2) | FEPS Status (Stator 1/Stator 2) |
|---|---|---|---|---|
| Climb | off off on | off on off | FMM/FMM FMM/CSB CSB/FMM | Normal operation (active/active) Fail-operative (active/passive) Fail-operative (passive/active) |
| Cruise, Loiter, Descent | off off | off on | HSB/FMM FMM/CSB | Normal operation (stand-by/active) Fail-operative (active/passive) |
| Flight termination/Landing | off off | off on | HSB/FTM FTM/CSB | Normal operation (stand-by/active) Fail-operative (active/passive) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Suti, A.; Di Rito, G.; Galatolo, R. Fault-Tolerant Control of a Dual-Stator PMSM for the Full-Electric Propulsion of a Lightweight Fixed-Wing UAV. Aerospace 2022, 9, 337. https://doi.org/10.3390/aerospace9070337
Suti A, Di Rito G, Galatolo R. Fault-Tolerant Control of a Dual-Stator PMSM for the Full-Electric Propulsion of a Lightweight Fixed-Wing UAV. Aerospace. 2022; 9(7):337. https://doi.org/10.3390/aerospace9070337
Chicago/Turabian StyleSuti, Aleksander, Gianpietro Di Rito, and Roberto Galatolo. 2022. "Fault-Tolerant Control of a Dual-Stator PMSM for the Full-Electric Propulsion of a Lightweight Fixed-Wing UAV" Aerospace 9, no. 7: 337. https://doi.org/10.3390/aerospace9070337
APA StyleSuti, A., Di Rito, G., & Galatolo, R. (2022). Fault-Tolerant Control of a Dual-Stator PMSM for the Full-Electric Propulsion of a Lightweight Fixed-Wing UAV. Aerospace, 9(7), 337. https://doi.org/10.3390/aerospace9070337