
Fluid–Structure Interaction Dynamic Response of Rocket Fairing in Falling Phase


Abstract
1. Introduction
2. Basic Theories of FSI
2.1. Fluid Mechanics
2.2. Basic Theory of Structural Dynamics
2.3. Thin-Plate Spline Interpolation Algorithm
2.4. Dynamic Mesh
2.5. CFD–CSD Coupling
3. Research Object
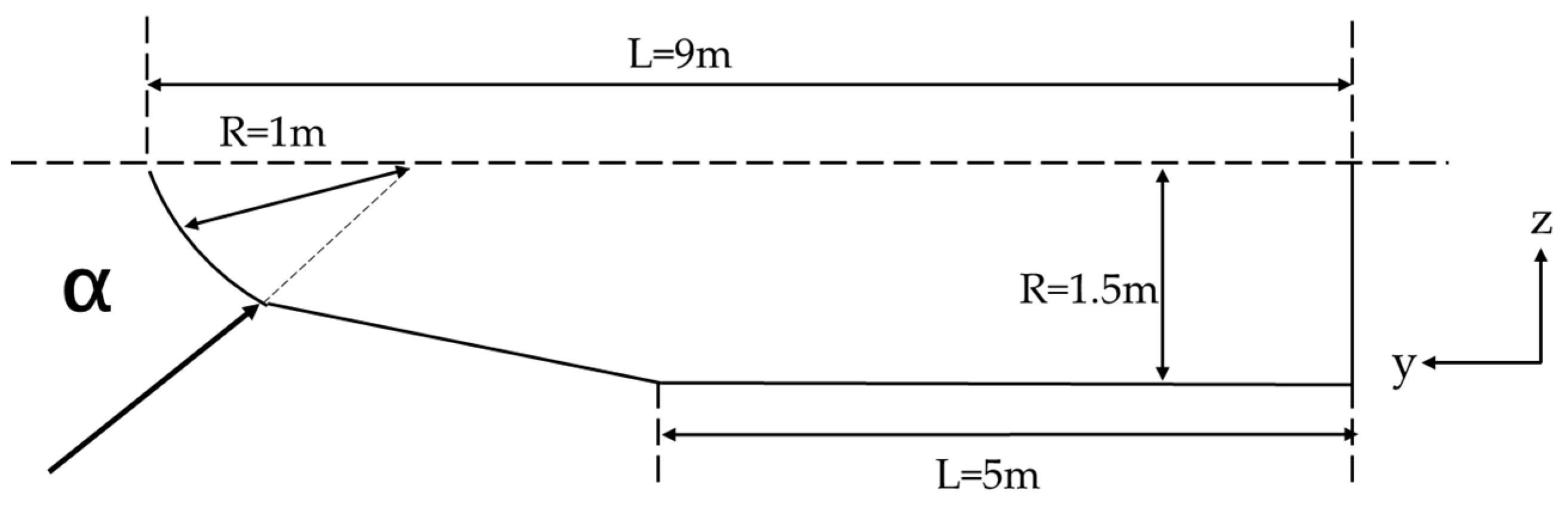
3.1. Research Object and Working Conditions
3.2. Grid for the Structure and Fluid
4. Verification of Methods
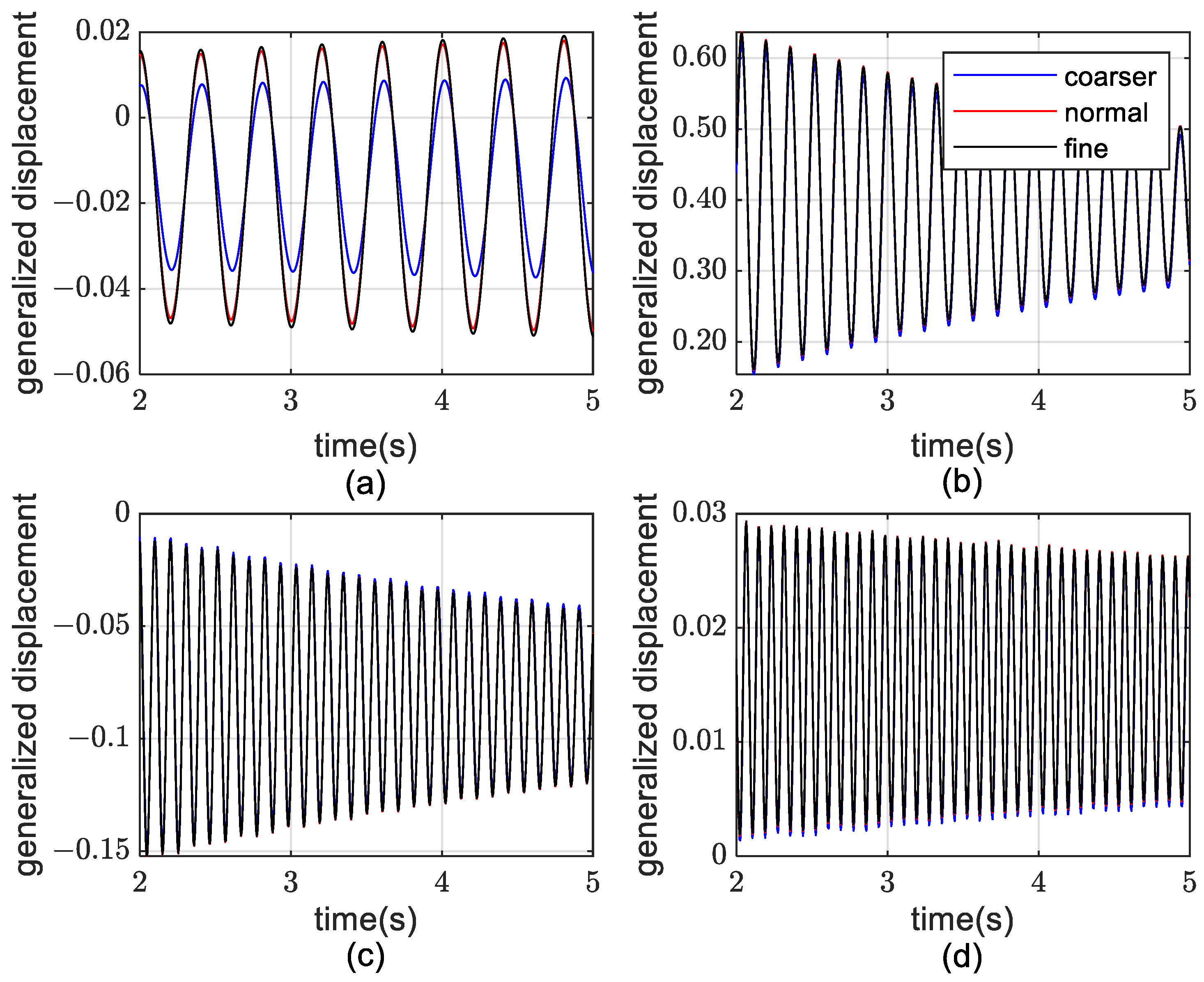
4.1. Grid Independence
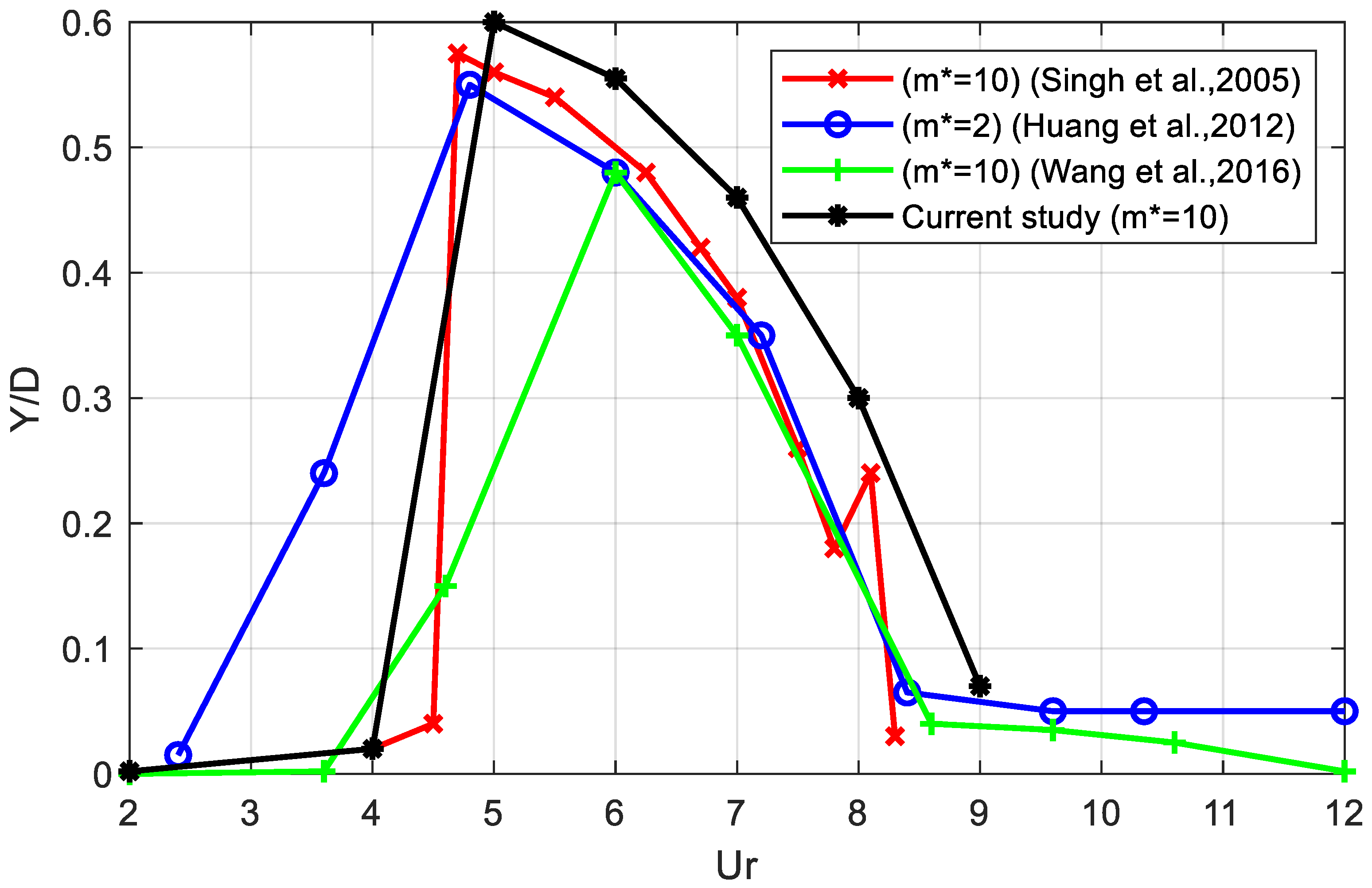
4.2. The Coupling Method
5. Numerical Results
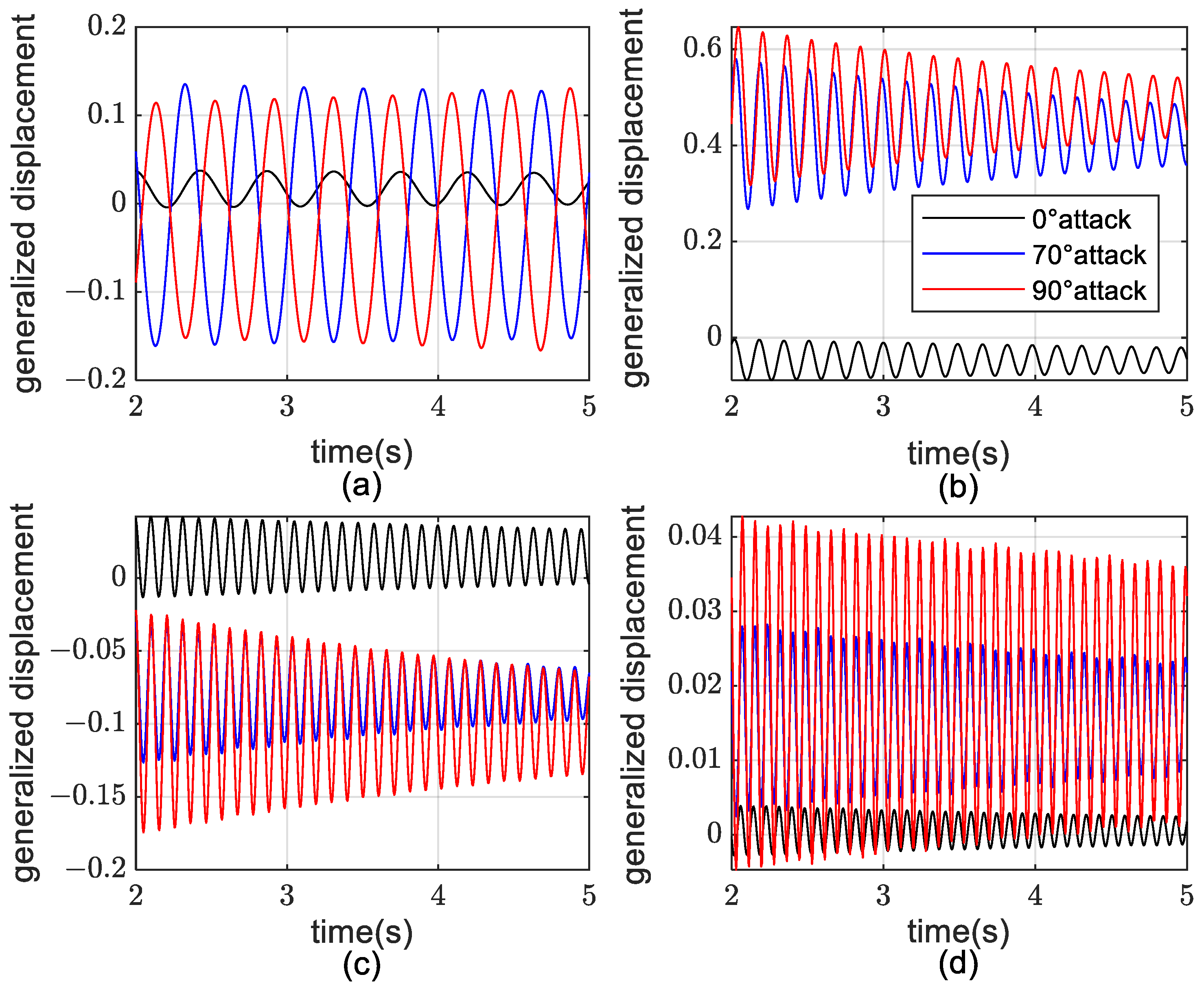
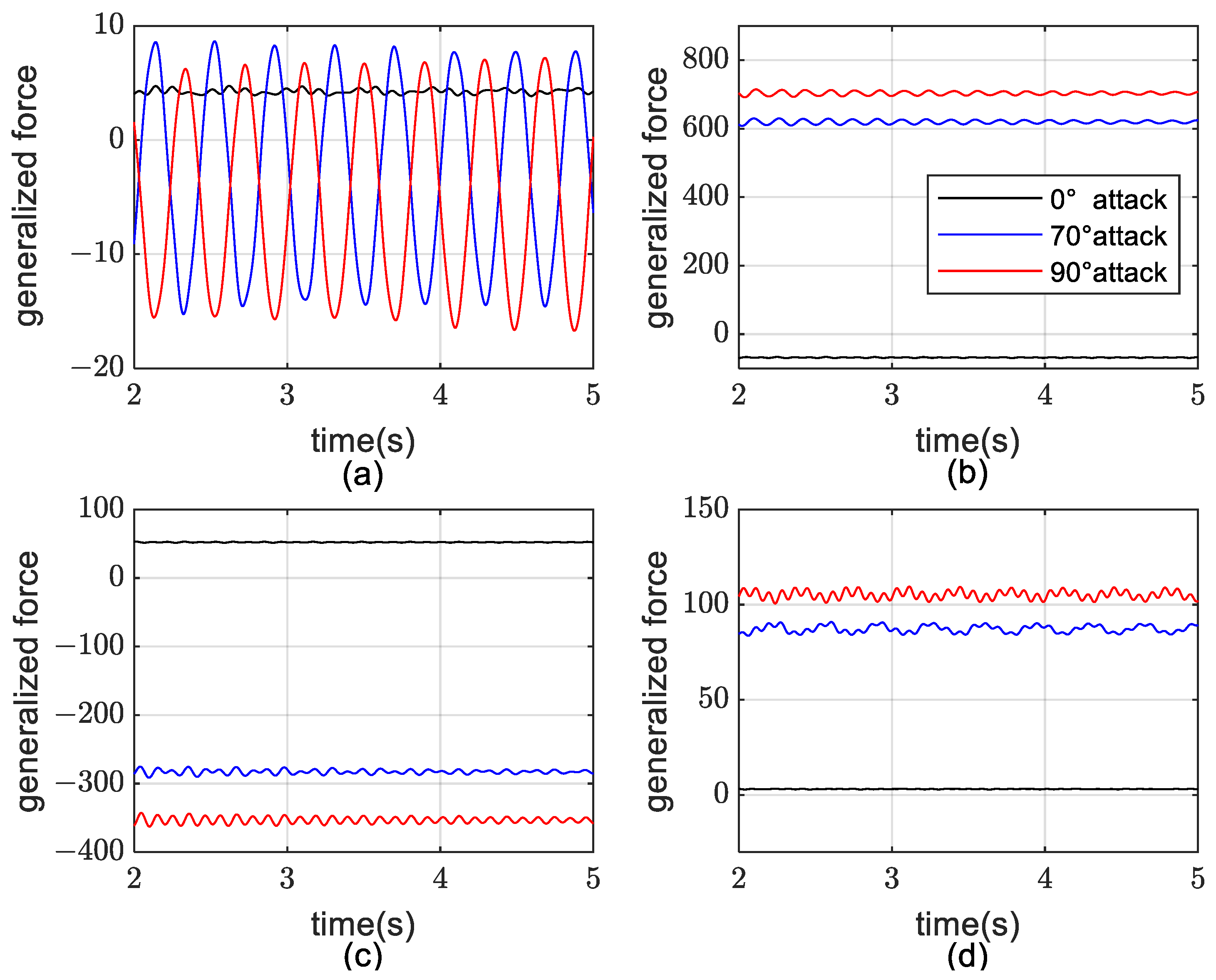
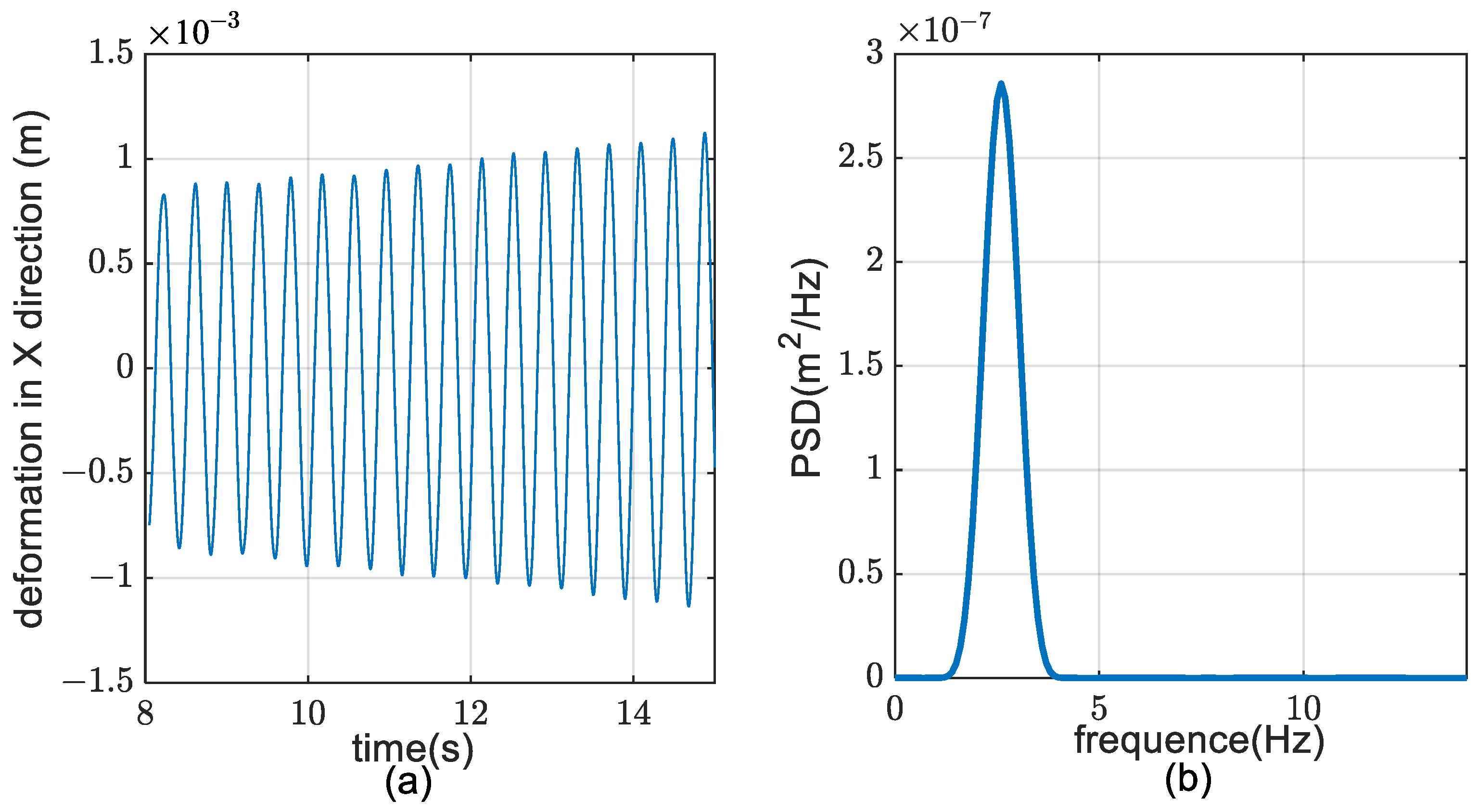
5.1. Typical Working Conditions
5.2. Influence of Mach Number
5.3. Influence of Dynamic Pressure
5.4. Summary of the Results of Calculations
6. Improvement Methods
6.1. Increasing Structural Rigidity
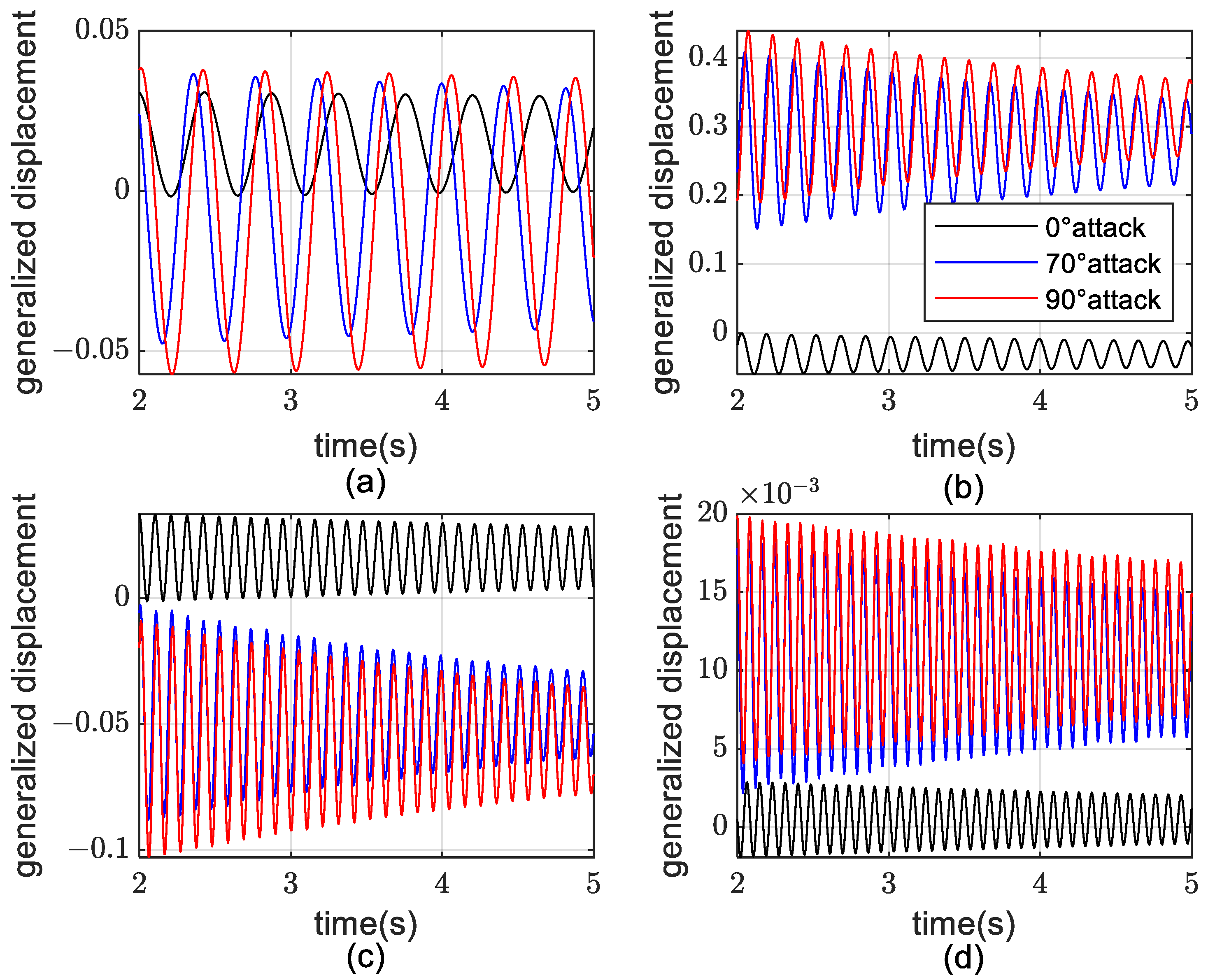
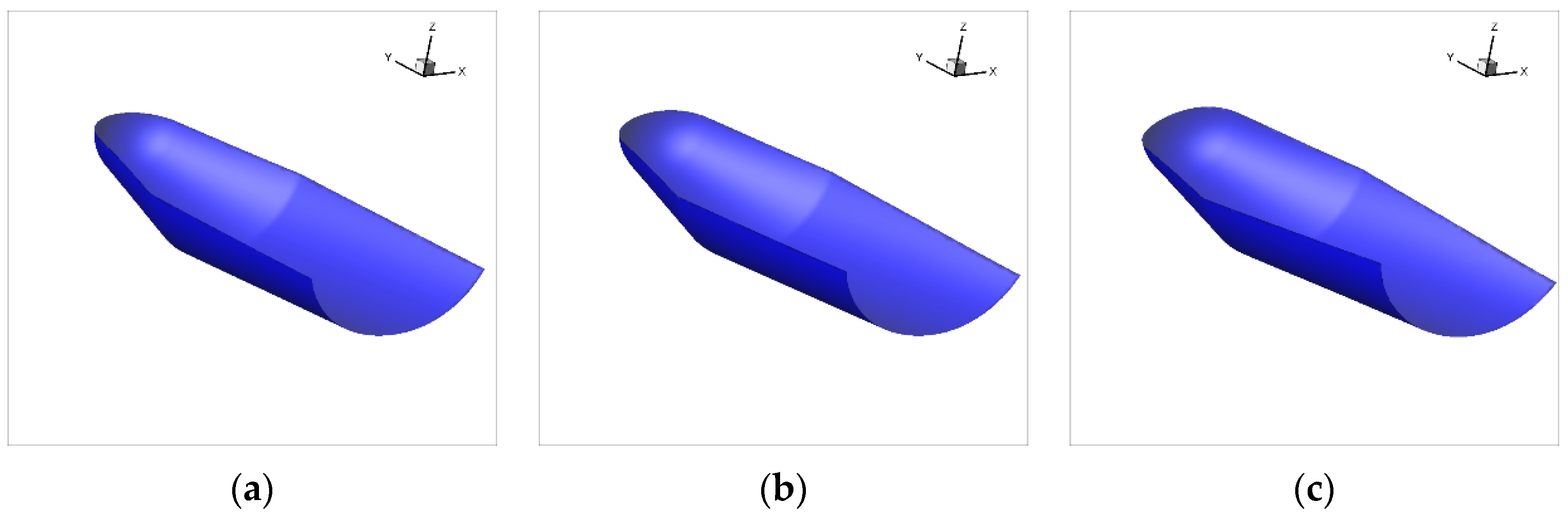
6.2. Attitude Control
6.3. Opening the Parachute at High Altitude
6.4. Combination of the Three Methods
7. Conclusions
- A framework of non-streamlined configurations with fluid–structure interactions was established. Several examples were used to verify that the proposed method can be used to calculate the FSI of the fairing and confirmed that the theoretical results corresponded to the actual situation. The work here provides ideas for future research on FSI involving objects with similar non-streamlined configurations.
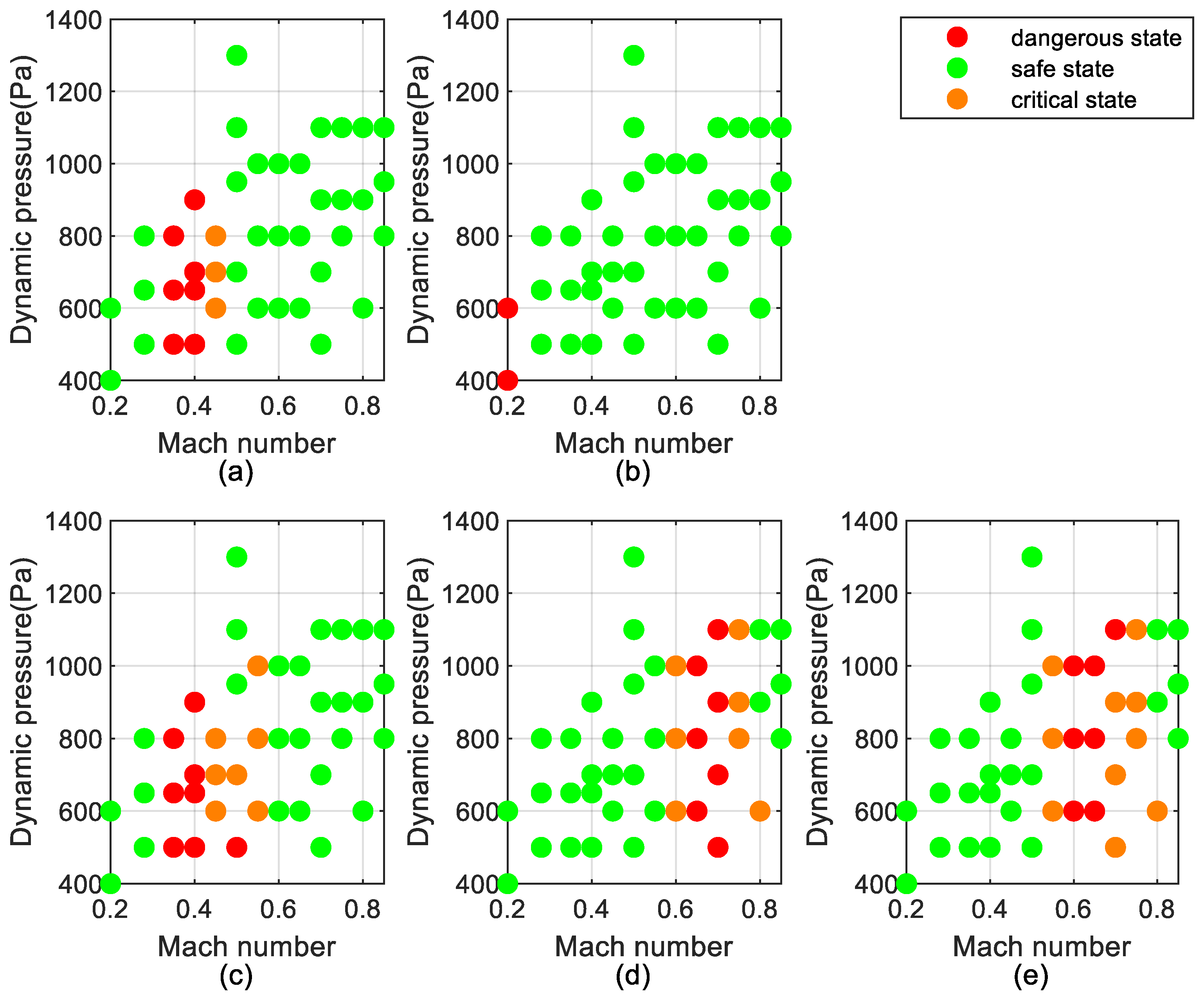
- Through the analysis and calculation of multiple working conditions, the dangerous zone and safe zone as the fairing fell were obtained, which were consistent with the actual falling situation. When , the hazardous zone occurred at ; when , it was concentrated in the Mach number range of 0.6 to 0.8. At the same time, the influences according to dynamic pressure and Mach number were also analyzed.
- According to the analysis, there is a risk of structural damage to the fairing as it falls. To suppress the vibration, a variety of possible methods were presented, such as enhancing the structural rigidity, flight attitude control, and opening the parachute at a high altitude. To verify the effectiveness of the method, a comprehensive method was used to calculate the vibration of the fairing during the descent. The fairing can land safely and avoid disintegration during the descent.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| Vector of convective flux | Vector of convective flux | ||
| Pressure | Density | ||
| Velocity vector | Temperature | ||
| Total energy per unit mass | Thermal conductivity coefficient | ||
| Viscous stress tensor | Mass matrix | ||
| Damping matrix | Stiffness matrix | ||
| Natural mode of the model | Displacement vector | ||
| Load | Identity matrix | ||
| Diagonal matrix | Frequency of the mode | ||
| Displacement of the node | Number of iterations | ||
| Ma | Mach number | Angle of attack | |
| Dynamic pressure | U | Flow speed | |
| Diameter | L | Length | |
| Kinematic viscosity | Non-dimensional mass | ||
| Reynolds number | Reduced velocity | ||
| Generalized displacement | Generalized force | ||
| Contravariant velocity of the face of a control volume | |||
| Contravariant velocity relative to the motion of the grid | |||
| Outward-facing unit normal vector of | |||
| Number of nodes adjacent to node | |||
| Spring constant between the given node and adjacent nodes | |||
Abbreviations
| CFD | Computational fluid dynamics |
| FSI | Fluid–structure interaction |
| CSD | Computational structural dynamics |
| ROM | Reduced-order model |
| RANS | Reynolds-averaged Navier–stokes |
| DOF | Degree of freedom |
| TPS | Thin Plate Spline |
| UDF | User-defined function |
References
- Versiani, T.D.S.S.; Silvestre, F.J.; Neto, A.B.G.; Rade, D.A.; Silva, R.; Donadon, M.V.; Bertolin, R.M.; Silva, G.C. Gust load alleviation in a flexible smart idealized wing. Aerosp. Sci. Technol. 2019, 86, 762–774. [Google Scholar] [CrossRef]
- Shi, Y.; Wan, Z.Q.; Wu, Z.G.; Yang, C. Nonlinear unsteady aerodynamics reduced order model of airfoils based on algorithm fusion and multifidelity framework. Int. J. Aerosp. Eng. 2021, 2021, 4368104. [Google Scholar] [CrossRef]
- Dai, Y.T.; Wu, Y.; Yang, C.; Huang, G.J.; Huang, C. Numerical study on gust energy harvesting with an efficient modal based fluid-structure interaction method. Aerosp. Sci. Technol. 2021, 116, 106819. [Google Scholar] [CrossRef]
- Abdullah, N.A.; Curiel-Sosa, J.L.; Akbar, M. Aeroelastic assessment of cracked composite plate by means of fully coupled finite element and Doublet Lattice Method. Compos. Struct. 2018, 202, 151–161. [Google Scholar] [CrossRef]
- Omran, A.; Newman, B. Full envelope nonlinear parameter-varying model approach for atmospheric flight dynamics. J. Guid. Control Dyn. 2012, 35, 270–283. [Google Scholar] [CrossRef]
- Ruiz, C.; Acosta, J.Á.; Ollero, A. Aerodynamic reduced-order Volterra model of an ornithopter under high-amplitude flapping. Aerosp. Sci. Technol. 2022, 121, 107331. [Google Scholar] [CrossRef]
- Wu, T.; Kareem, A. A nonlinear analysis framework for bluff-body aerodynamics: A Volterra representation of the solution of Navier-Stokes equations. J. Fluids Struct. 2015, 54, 479–502. [Google Scholar] [CrossRef]
- Torregrosa, A.J.; Gil, A.; Quintero, P.; Cremades, A. A reduced order model based on artificial neural networks for nonlinear aeroelastic phenomena and application to composite material beams. Compos. Struct. 2022, 295, 115845. [Google Scholar] [CrossRef]
- Liu, Y.; Xie, C.C.; Yang, C.; Cheng, J.L. Gust response analysis and wind tunnel test for a high-aspect ratio wing. Chin. J. Aeronaut. 2016, 29, 91–103. [Google Scholar] [CrossRef]
- Kousen, K.A. Limit cycle phenomena in computational transonic aeroelasticity. J. Aircr. 1994, 31, 1257–1263. [Google Scholar] [CrossRef]
- Hallissy, B.; Cesnik, C. High-fidelity aeroelastic analysis of very flexible aircraft. In Proceedings of the 52nd AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics and Materials Conference, Denver, CO, USA, 4–7 April 2011. [Google Scholar]
- Mian, H.H.; Wang, G.; Ye, Z. Numerical investigation of structural geometric nonlinearity effect in high-aspect-ratio wing using CFD/CSD coupled approach. J. Fluids Struct. 2014, 49, 186–201. [Google Scholar] [CrossRef]
- Ilie, M. A fully-coupled CFD/CSD computational approach for aeroelastic studies of helicopter blade-vortex interaction. Appl. Math. Comput. 2019, 347, 122–142. [Google Scholar] [CrossRef]
- Aprovitola, A.; Dyblenko, O.; Pezzella, G.; Viviani, A. Aerodynamic analysis of a supersonic transport aircraft at low and high speed flow conditions. Aerospace 2022, 9, 411. [Google Scholar] [CrossRef]
- Franzmann, C.; Leopold, F.; Mundt, C. Low-interference wind tunnel measurement technique for pitch damping coefficients at transonic and low supersonic Mach numbers. Aerospace 2022, 9, 51. [Google Scholar] [CrossRef]
- Zhong, Q.; Fan, Y.H.; Wu, W.B. A switching-based control method for the fairing separation control of axisymmetric hypersonic vehicles. Aerospace 2022, 9, 132. [Google Scholar] [CrossRef]
- Tsutsumi, S.; Takaki, R.; Takama, Y.; Imagawa, K.; Nakakita, K.; Kato, H. Hybrid LES/RANS Simulations of Transonic Flowfield Around a Rocket Fairing. In Proceedings of the 30th AIAA Applied Aerodynamics Conference, New Orleans, LA, USA, 25–28 June 2012. [Google Scholar]
- Morshed, M.M.M.; Hansen, C.H.; Zander, A.C. Prediction of Acoustic Loads on a Launch Vehicle Fairing During Liftoff. J. Spacecr. Rocket. 2013, 50, 159–168. [Google Scholar] [CrossRef]
- Tatsukawa, T.; Nonomura, T.; Oyama, A.; Fujii, K. Multi-Objective Aeroacoustic Design Exploration of Launch-Pad Flame Deflector Using Large-Eddy Simulation. J. Spacecr. Rocket. 2016, 53, 751–758. [Google Scholar] [CrossRef]
- Sunil, K.; Johri, I.; Priyadarshi, P. Aerodynamic Shape Optimization of Payload Fairing Boat Tail for Various Diameter Ratios. J. Spacecr. Rocket. 2022, 59, 1135–1148. [Google Scholar] [CrossRef]
- Cheng, Y.; Li, D.C.; Xiang, J.W.; Da Ronch, A. Energy harvesting performance of plate wing from discrete gust excitation. Aerospace 2019, 6, 37. [Google Scholar] [CrossRef]
- Bekemeyer, P.; Timme, S. Flexible aircraft gust encounter simulation using subspace projection model reduction. Aerosp. Sci. Technol. 2019, 86, 805–817. [Google Scholar] [CrossRef]
- Wang, N.K. Fluid Structure Coupling Analysis of Non-Streamline Construction. Master’s Thesis, Beihang University, Beijing, China, 2020. [Google Scholar]
- Guo, T.; Lu, D.; Lu, Z.; Zhou, D.; Lyu, B.; Wu, J. CFD/CSD-based flutter prediction method for experimental models in a transonic wind tunnel with porous wall. Chin. J. Aeronaut. 2020, 33, 3100–3111. [Google Scholar] [CrossRef]
- Barakos, G.N.; Fitzgibbon, T.; Kusyumov, A.N.; Kusyumov, S.A.; Mikhailov, S.A. CFD simulation of helicopter rotor flow based on unsteady actuator disk model. Chin. J. Aeronaut. 2020, 33, 2313–2328. [Google Scholar] [CrossRef]
- Singh, S.P.; Mittal, S. Vortex-induced oscillations at low Reynolds numbers: Hysteresis and vortex-shedding modes. J. Fluids. Struct. 2005, 20, 1085–1104. [Google Scholar] [CrossRef]
- Huang, J.L. Study on Flow-Induced Vibrations of Two Tandem-Arranged Circular Cylinders in Laminar Flow with Low Reynolds Number. Master’s Thesis, Tianjin University, Tianjin, China, 2012. [Google Scholar]
- Wang, M. Numerical Investigation on Vortex-Induced Vibrations of the Tandem Wavy Cylinders. Master’s Thesis, Wuhan University of Technology, Wuhan, China, 2016. [Google Scholar]
- Draft Environmental Assessment for Issuing a Reentry License to SpaceX for Landing the Dragon Spacecraft in the Gulf of Mexico. Available online: http://34.196.180.244/2018/04/12/details-spacex-fairing-drogue-parachute-recovery-efforts/ (accessed on 16 November 2022).




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Fairing | Young’s Modulus (Pa) | Poisson’s Ratio | Density (kg/m3) |
|---|---|---|---|
| Head | 0.33 | 3200 | |
| Shell | 0.33 | 2500 |
| Working Condition | Dynamic Pressure (Pa) | Mach Number | Temperature (K) |
|---|---|---|---|
| 1 | 700 | 0.5 | 218.6 |
| 2 | 1000 | 0.6 | 220 |
| Grid | Elements | Minimum Volume (m3) |
|---|---|---|
| Fine | 2,362,564 | |
| Baseline | 1,876,113 | |
| Coarse | 1,517,761 |
| Method | Advantages | Disadvantages |
|---|---|---|
| Increasing structural rigidity | Easy to alter | Increased launch cost Increased weight |
| Attitude control | Light in added weight | Complicated to alter |
| Opening the parachute at high altitude | Relatively light in added weight | Increased certain launch cost Relatively complicated to alter |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Z.; Yang, C.; Zhao, J.; Wu, Z. Fluid–Structure Interaction Dynamic Response of Rocket Fairing in Falling Phase. Aerospace 2022, 9, 741. https://doi.org/10.3390/aerospace9120741
Yang Z, Yang C, Zhao J, Wu Z. Fluid–Structure Interaction Dynamic Response of Rocket Fairing in Falling Phase. Aerospace. 2022; 9(12):741. https://doi.org/10.3390/aerospace9120741
Chicago/Turabian StyleYang, Zexuan, Chao Yang, Jiamin Zhao, and Zhigang Wu. 2022. "Fluid–Structure Interaction Dynamic Response of Rocket Fairing in Falling Phase" Aerospace 9, no. 12: 741. https://doi.org/10.3390/aerospace9120741
APA StyleYang, Z., Yang, C., Zhao, J., & Wu, Z. (2022). Fluid–Structure Interaction Dynamic Response of Rocket Fairing in Falling Phase. Aerospace, 9(12), 741. https://doi.org/10.3390/aerospace9120741