
Influence of Nose Landing Gear Torsional Damping on the Stability of Aircraft Taxiing Direction

Abstract
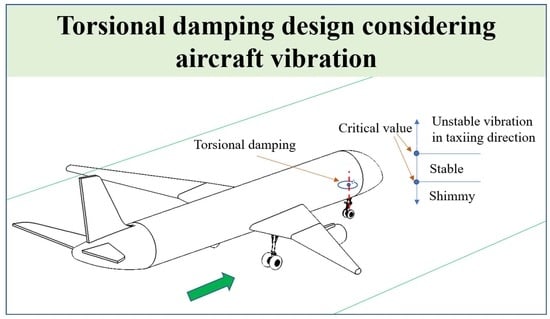
1. Introduction
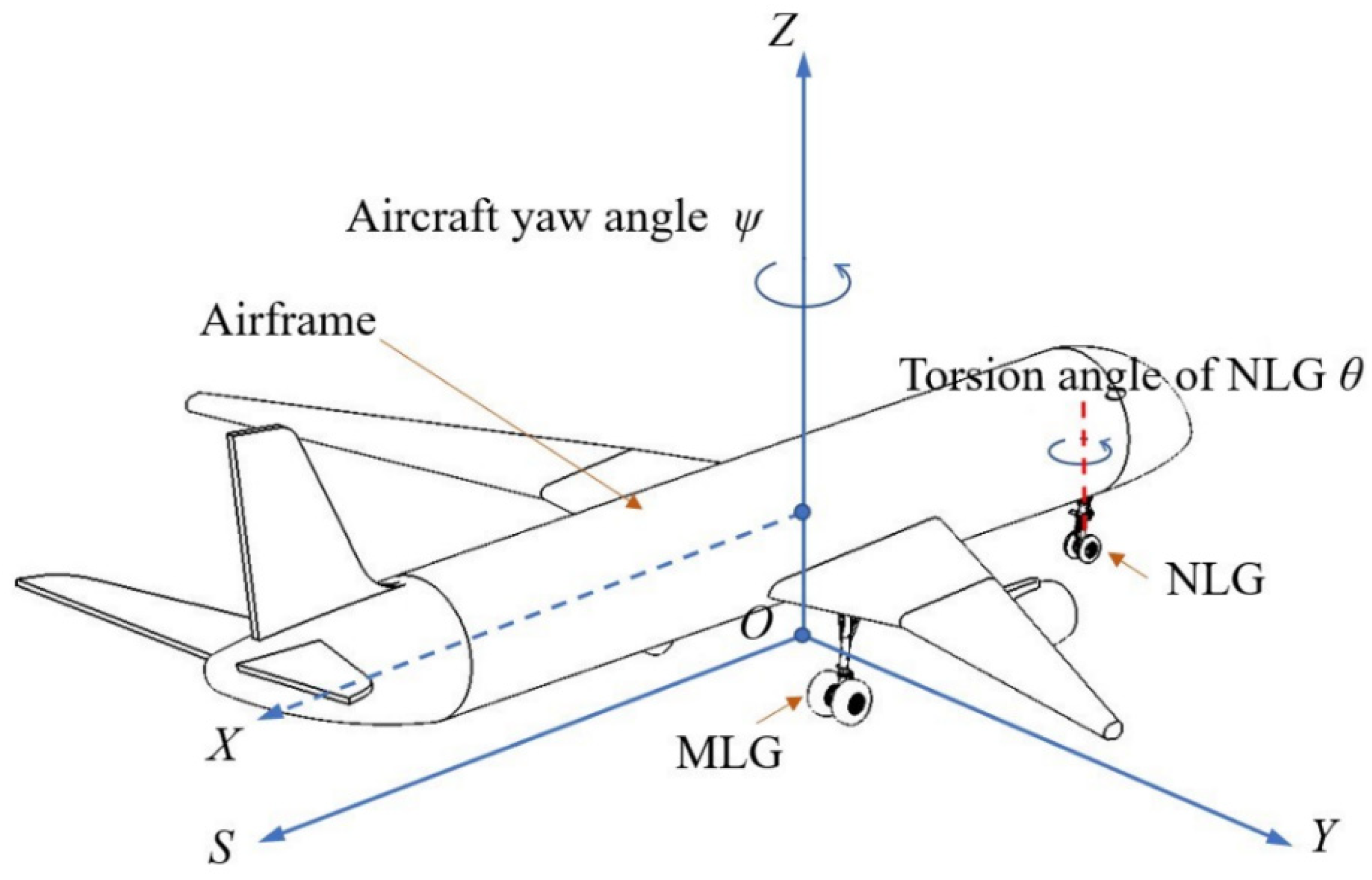
2. MBD Model of Aircraft
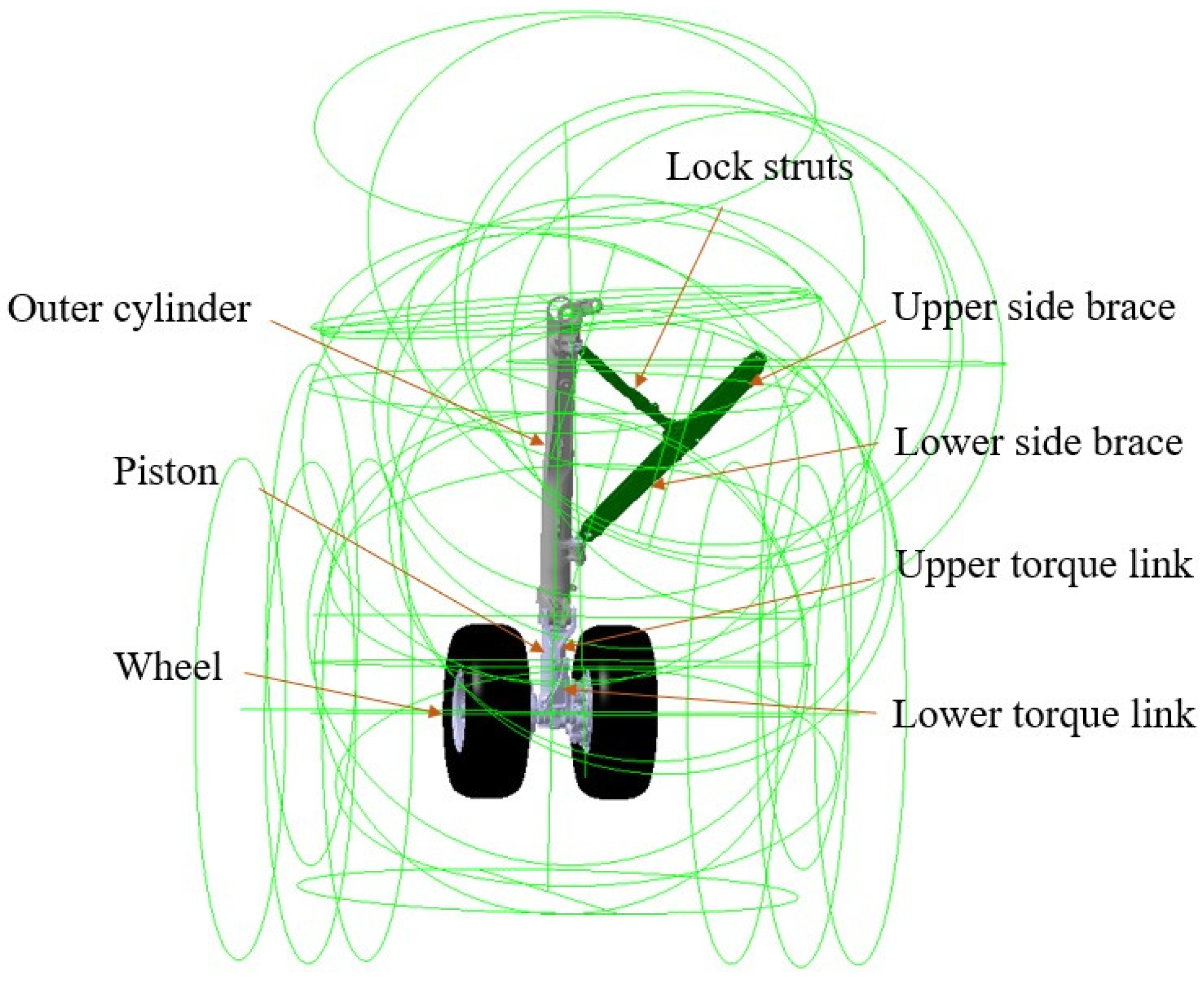
2.1. MBD Model of NLG
2.2. MBD Model of MLG
2.3. Airframe MBD Model and External Conditions
3. Results and Discussion
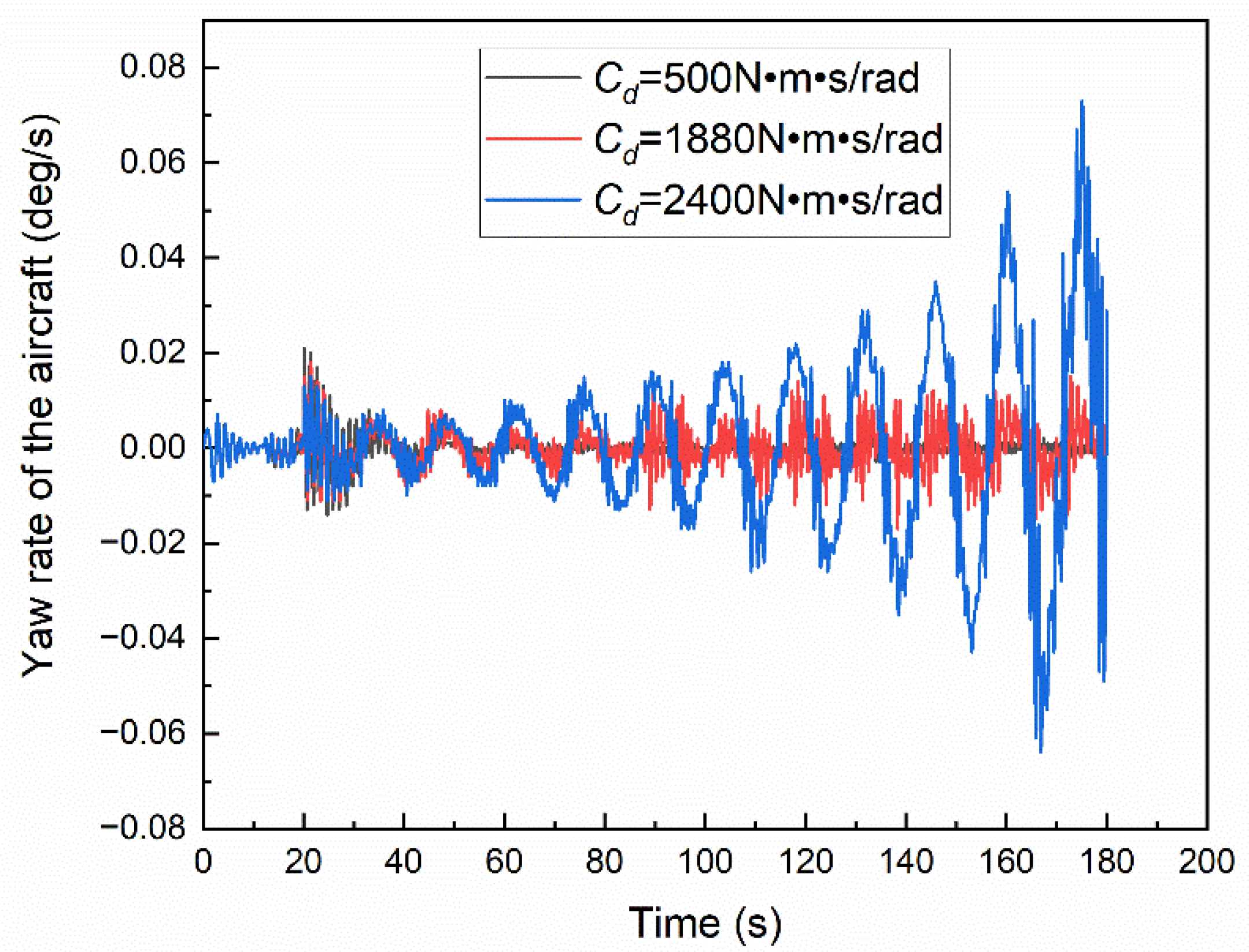
3.1. Relationship between Torsional Damping and Directional Stability of Aircraft
3.2. Characteristics of Key Parameters in the Aircraft Taxiing Process
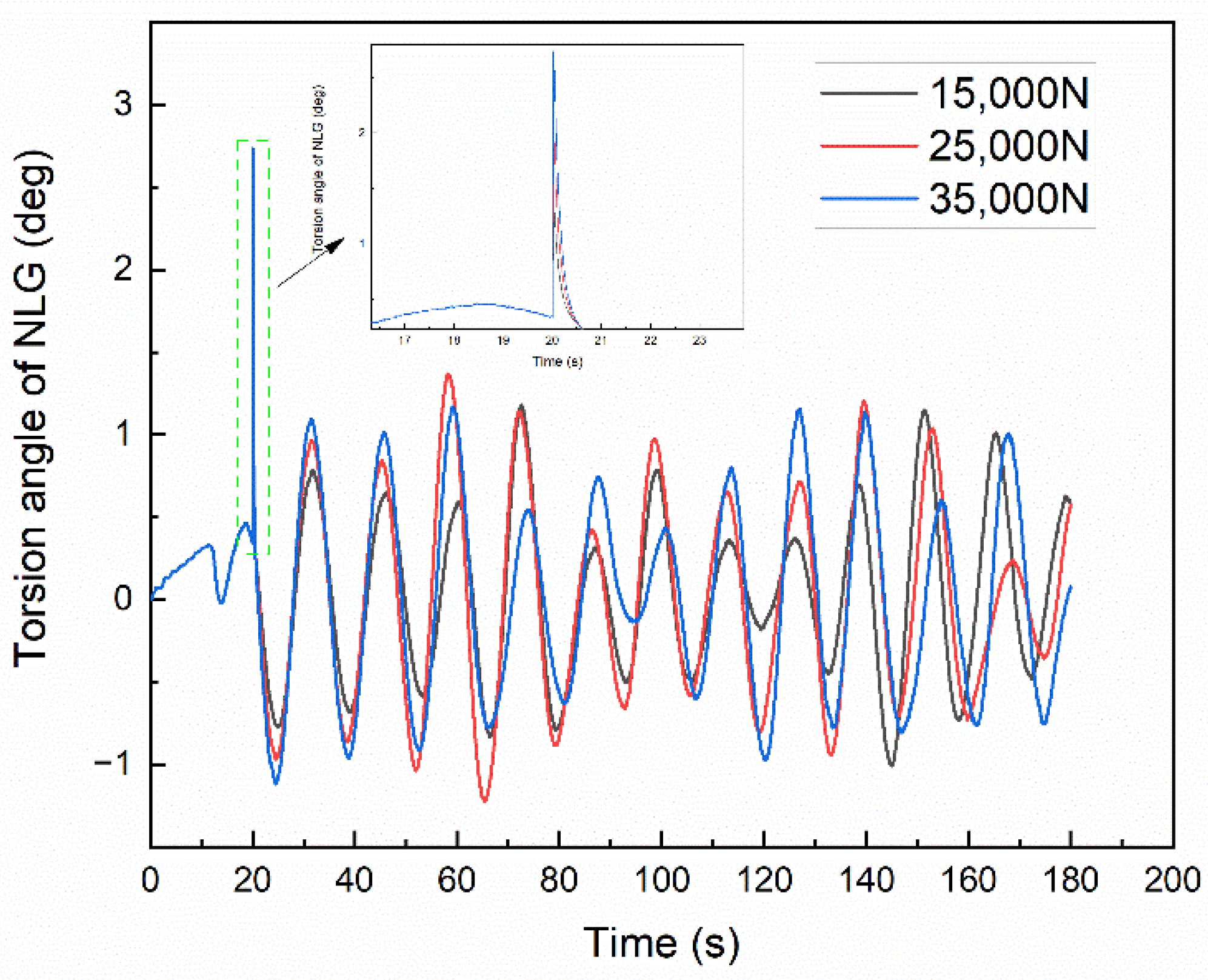
3.2.1. Initial Excitation
3.2.2. Landing Gear Shock Absorber Compression
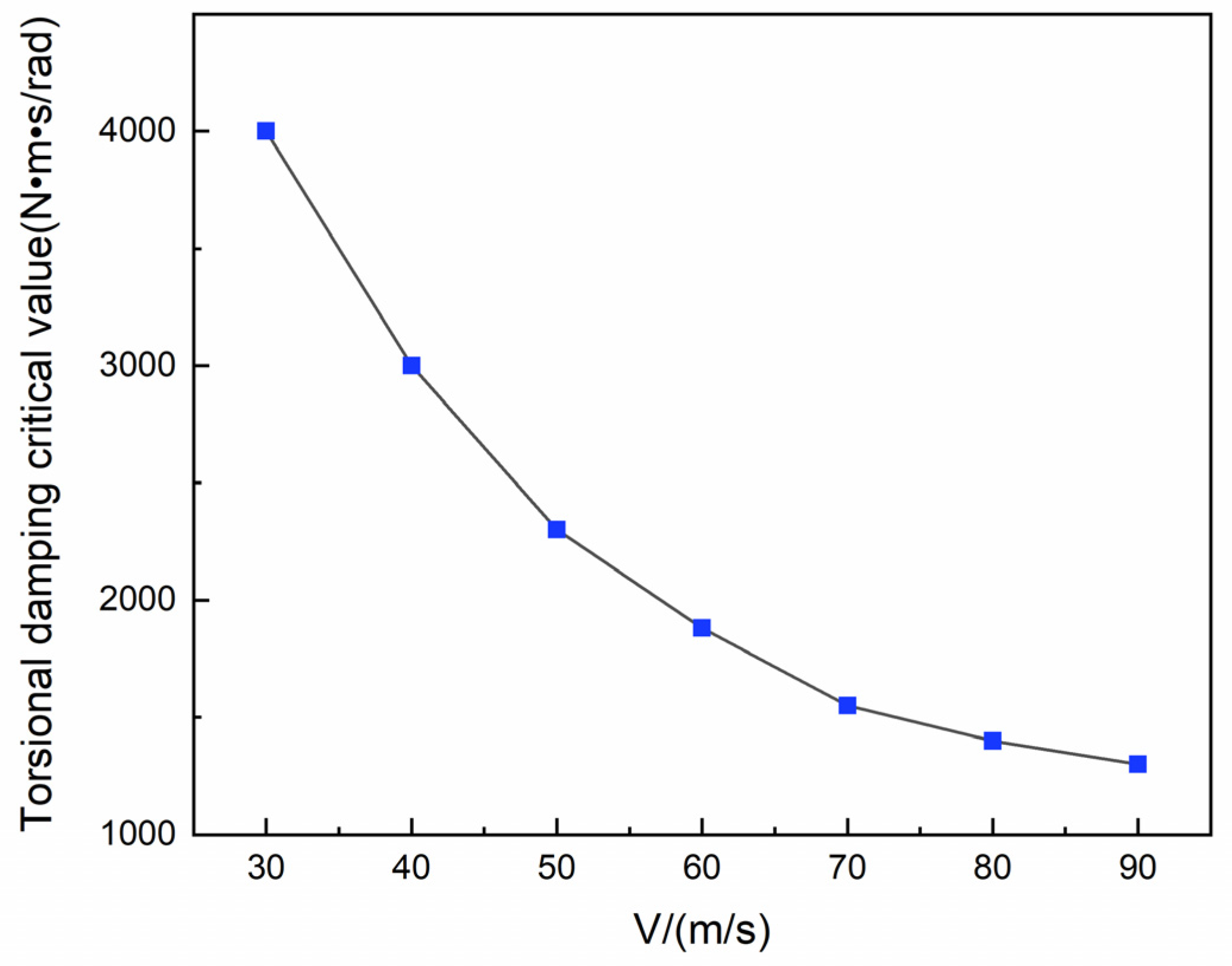
3.3. Torsional Damping Critical Value
3.4. NLG Shimmy and Aircraft Directional Stability
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Depei, Z. Shimmy Theory and Anti-Shimmy Measure; National Defense Industry Press: Beijing, China, 1984. [Google Scholar]
- Feng, F.; Nie, H.; Zhang, M.; Peng, Y. Effect of Torsional Damping on Aircraft Nose Landing-Gear Shimmy. J. Aircr. 2015, 52, 561–568. [Google Scholar] [CrossRef]
- Rahmani, M.; Behdinan, K. Interaction of Torque Link Freeplay and Coulomb Friction Nonlinearities in Nose Landing Gear Shimmy Scenarios. Int. J. Non. Linear. Mech. 2020, 119, 103338. [Google Scholar] [CrossRef]
- Gordon, J.T. Perturbation Analysis of Nonlinear Wheel Shimmy. J. Aircr. 2002, 39, 305–317. [Google Scholar] [CrossRef]
- Arreaza, C.; Behdinan, K.; Zu, J.W. Linear Stability Analysis and Dynamic Response of Shimmy Dampers for Main Landing Gears. J. Appl. Mech. Trans. ASME 2016, 83, 081002. [Google Scholar] [CrossRef]
- Rahmani, M.; Behdinan, K. Investigation on the Effect of Coulomb Friction on Nose Landing Gear Shimmy. JVC/J. Vib. Control 2019, 25, 255–272. [Google Scholar] [CrossRef]
- Suresh, P.S.; Sura, N.K.; Shankar, K. Investigation of Nonlinear Landing Gear Behavior and Dynamic Responses on High Performance Aircraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 5674–5688. [Google Scholar] [CrossRef]
- Tartaruga, I.; Lowenberg, M.H.; Cooper, J.E.; Sartor, P.; Lemmens, Y. Bifurcation Analysis of a Nose Landing Gear System. In Proceedings of the 15th Dynamics Specialists Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar] [CrossRef]
- Tourajizadeh, H.; Zare, S. Robust and Optimal Control of Shimmy Vibration in Aircraft Nose Landing Gear. Aerosp. Sci. Technol. 2016, 50, 1–14. [Google Scholar] [CrossRef]
- Orlando, C.; Alaimo, A. A Robust Active Control System for Shimmy Damping in the Presence of Free Play and Uncertainties. Mech. Syst. Signal Process. 2017, 84, 551–569. [Google Scholar] [CrossRef]
- Sanches, L.; Guimarães, T.A.M.; Marques, F.D. Nonlinear Energy Sink to Enhance the Landing Gear Shimmy Performance. Acta Mech. 2021, 232, 2605–2622. [Google Scholar] [CrossRef]
- Orlando, C. Nose Landing Gear Simple Adaptive Shimmy Suppression System. J. Guid. Control. Dyn. 2020, 43, 1298–1312. [Google Scholar] [CrossRef]
- Rahmani, M.; Behdinan, K. Parametric Study of a Novel Nose Landing Gear Shimmy Damper Concept. J. Sound Vib. 2019, 457, 299–313. [Google Scholar] [CrossRef]
- Rahmani, M.; Behdinan, K. On the Effectiveness of Shimmy Dampers in Stabilizing Nose Landing Gears. Aerosp. Sci. Technol. 2019, 91, 272–286. [Google Scholar] [CrossRef]
- Mustashin, M.S.; Rahmani, M.; Behdinan, K. Experimental Characterization of a Novel Nose Landing Gear Shimmy Damper Using a Small-Scale Test Rig. Aerosp. Sci. Technol. 2021, 112, 106625. [Google Scholar] [CrossRef]
- Cheng, L.; Cao, H.; Zhang, L. Two-Parameter Bifurcation Analysis of an Aircraft Nose Landing Gear Model. Nonlinear Dyn. 2021, 103, 367–381. [Google Scholar] [CrossRef]
- Thota, P.; Krauskopf, B.; Lowenberg, M. Bifurcation Analysis of Nose-Landing-Gear Shimmy with Lateral and Longitudinal Bending. J. Aircr. 2010, 47, 87–95. [Google Scholar] [CrossRef]
- She, C.; Zhang, M.; Ge, Y.; Tang, L.; Yin, H.; Peng, G. Design and Simulation Analysis of an Electromagnetic Damper for Reducing Shimmy in Electrically Actuated Nose Wheel Steering Systems. Aerospace 2022, 9, 113. [Google Scholar] [CrossRef]
- Rahmani, M.; Behdinan, K. Structural Design and Optimization of a Novel Shimmy Damper for Nose Landing Gears. Struct. Multidiscip. Optim. 2020, 62, 2783–2803. [Google Scholar] [CrossRef]
- Li, Y.; Howcroft, C.; Neild, S.A.; Jiang, J.Z. Using Continuation Analysis to Identify Shimmy-Suppression Devices for an Aircraft Main Landing Gear. J. Sound Vib. 2017, 408, 234–251. [Google Scholar] [CrossRef]
- Coetzee, E.; Krauskopf, B.; Lowenberg, M. Continuation Analysis of Aircraft Ground Loads during High-Speed Turns. J. Aircr. 2013, 50, 217–231. [Google Scholar] [CrossRef][Green Version]
- Yin, Q.; Nie, H.; Wei, X. Dynamics and Directional Stability of High-Speed Unmanned Aerial Vehicle Ground Taxiing Process. J. Aircr. 2020, 57, 689–701. [Google Scholar] [CrossRef]
- Huang, Z.; Best, M.; Knowles, J. An Investigation of a High-Speed Ground Manoeuvre under Optimal Control. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 4363–4379. [Google Scholar] [CrossRef]
- Rankin, J.; Coetzee, E.; Krauskopf, B.; Lowenberg, M. Bifurcation and Stability Analysis of Aircraft Turning on the Ground. J. Guid. Control. Dyn. 2009, 32, 499–510. [Google Scholar] [CrossRef][Green Version]
- Song, L.; Yang, H.; Yan, X.; Ma, C.; Huang, J. A Study of Instability in a Miniature Flying-Wing Aircraft in High-Speed Taxi. Chinese J. Aeronaut. 2015, 28, 749–756. [Google Scholar] [CrossRef][Green Version]
- Smiley, R.F. Correlation, Evaluation, and Extention of Linearized Theories for Tire Motion and Wheel Shimmy; NACA TN-3632; National Advisory Committee for Aeronautics: Washington, WA, USA, 1956. [Google Scholar]
- Ran, S.; Besselink, I.J.M.; Nijmeijer, H. Application of Nonlinear Tyre Models to Analyse Shimmy. Veh. Syst. Dyn. 2014, 52, 387–404. [Google Scholar] [CrossRef]
- Thota, P.; Krauskopf, B.; Lowenberg, M. Interaction of Torsion and Lateral Bending in Aircraft Nose Landing Gear Shimmy. Nonlinear Dyn. 2009, 57, 455–467. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Load Type | Force Element |
|---|---|---|
| 1 | Air spring force | Scalar Expression Force |
| 2 | Oil damping force | Scalar Expression Force |
| 3 | Structural limiting force | Bump Stop Force |
| 4 | Torsional damping torque | Standard Bushing |
| 5 | Tire force | Complex Tire |
| Parameter | Description | Value of NLG | Value of MLG | Unit |
|---|---|---|---|---|
| Pa0 | Initial gas pressure | 2,425,000 | 2,843,000 | Pa |
| V0 | Initial gas volume | 3.059 × 10−3 | 1.17 × 10−2 | m3 |
| Aa | Pressure area | 7.11 × 10−3 | 2.47 × 10−2 | m2 |
| ρ | Oil density | 860 | 860 | kg/m3 |
| Patm | Atmospheric pressure | 1,010,000 | 1,010,000 | Pa |
| n | Air variability index | 1.1 | 1.1 | - |
| kstrut | Structural limited stiffness | 1.96 × 108 | 1.96 × 108 | N/m |
| Smax | Maximum stroke | 0.43 | 0.47 | m |
| S | Stroke | - | - | m |
| Parameter | Description | Value | Unit |
|---|---|---|---|
| Airframe | |||
| mG | Aircraft mass | 72,500 | kg |
| Ix | Airframe moment of inertia about roll axis | 2,175,000 | Kg m2 |
| Iy | Airframe moment of inertia about strut axis | 3,630,000 | Kg m2 |
| Iz | Airframe moment of inertia about pitch axis | 900,000 | Kg m2 |
| Landing gear structural | |||
| lq | Longitudinal distance from nose wheel to center of gravity | 12.715 | m |
| lz | Longitudinal distance from main wheel to center of gravity | 0.753 | m |
| I | Moment of inertia of the NLG about the orientation axis | 1.75 | Kg m2 |
| t | Caster length | 38 | mm |
| Cd | Torsional damping | - | N m s/rad |
| Tire of NLG | |||
| RN | Radius of tire | 0.3854 | m |
| KN | Vertical stiffness of tire | 1,174,000 | N/m |
| bq | Torsional stiffness of tire | 7746 | N m/rad |
| Nq | Cornering stiffness of tire | 173,088.9 | N/m |
| Kδ | Lateral stiffness of tire | 392,273.7 | N/m |
| Kβ | Longitudinal stiffness of tire | 786,381.1 | N/m |
| Tire of MLG | |||
| RM | Radius of tire | 0.6248 | m |
| KM | Vertical stiffness of tire | 1,364,000 | N/m |
| bz | Torsional stiffness of tire | 9295.2 | N m/rad |
| Nz | Cornering stiffness of tire | 207,692 | N/m |
| External conditions | |||
| ρ | Air density at the altitude of the aircraft | 1.29 | kg/m3 |
| Seff | Equivalent area of aircraft wing | 129.15 | m2 |
| c | Lift coefficient | 0.5 | - |
| μ | Tire rolling friction coefficient | 0.04 | - |
| N | Nose wheel vertical load | 7000*9.8 | N |
| V | Taxiing speed | - | m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, Y.; Feng, G.; Liu, P.; Yuan, L.; Ding, J.; Jiang, B. Influence of Nose Landing Gear Torsional Damping on the Stability of Aircraft Taxiing Direction. Aerospace 2022, 9, 729. https://doi.org/10.3390/aerospace9110729
Jiang Y, Feng G, Liu P, Yuan L, Ding J, Jiang B. Influence of Nose Landing Gear Torsional Damping on the Stability of Aircraft Taxiing Direction. Aerospace. 2022; 9(11):729. https://doi.org/10.3390/aerospace9110729
Chicago/Turabian StyleJiang, Yiyao, Guang Feng, Panglun Liu, Li Yuan, Jianbin Ding, and Bingyan Jiang. 2022. "Influence of Nose Landing Gear Torsional Damping on the Stability of Aircraft Taxiing Direction" Aerospace 9, no. 11: 729. https://doi.org/10.3390/aerospace9110729
APA StyleJiang, Y., Feng, G., Liu, P., Yuan, L., Ding, J., & Jiang, B. (2022). Influence of Nose Landing Gear Torsional Damping on the Stability of Aircraft Taxiing Direction. Aerospace, 9(11), 729. https://doi.org/10.3390/aerospace9110729