
Model Predictive Control Based on ILQR for Tilt-Propulsion UAV


Abstract
:1. Introduction
2. System Model
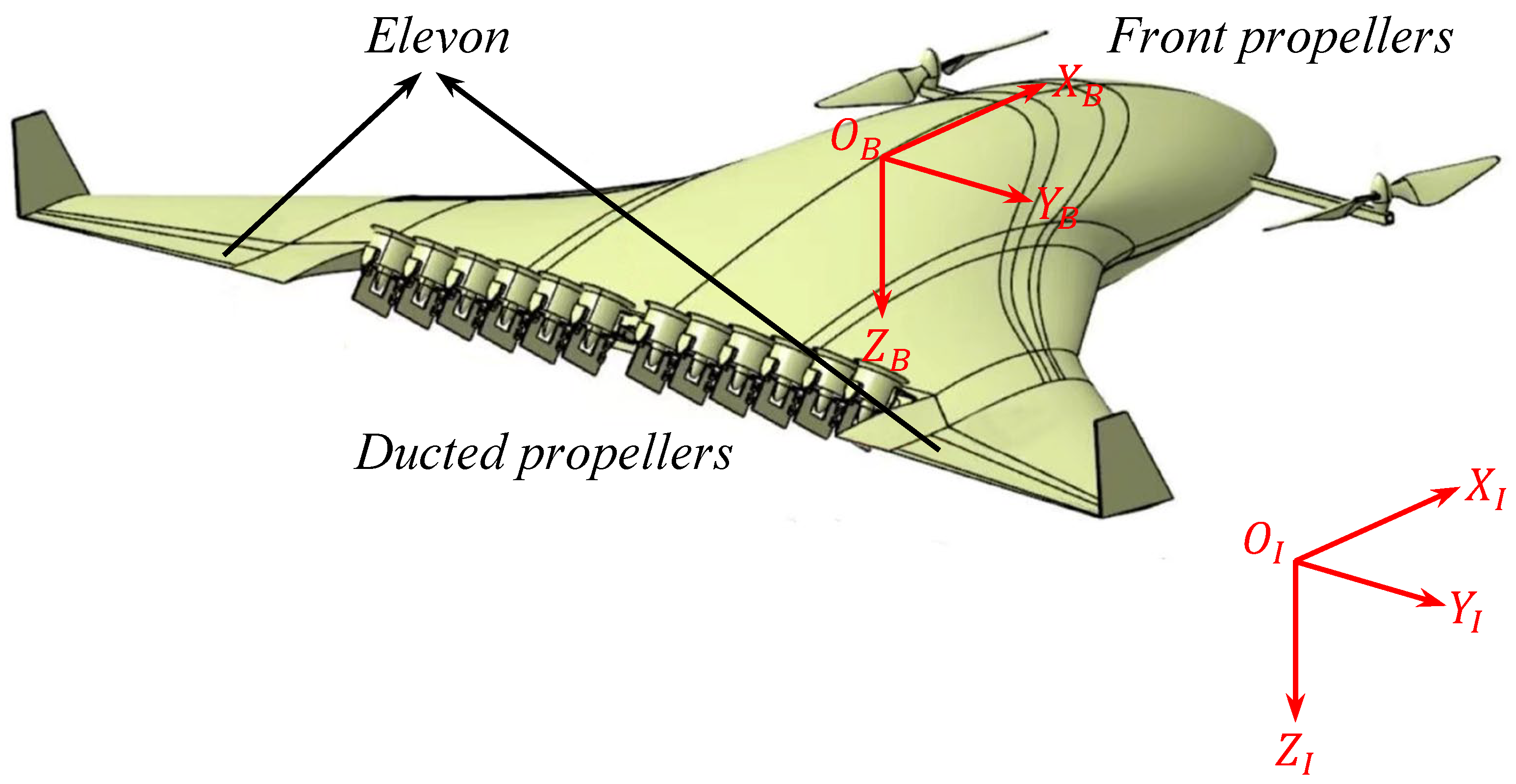
2.1. Tilt-Propulsion UAV Configuration
2.2. Dynamic Model of TPUAV
2.2.1. Aerodynamic Model of Fuselage
2.2.2. Model of Front Propellers
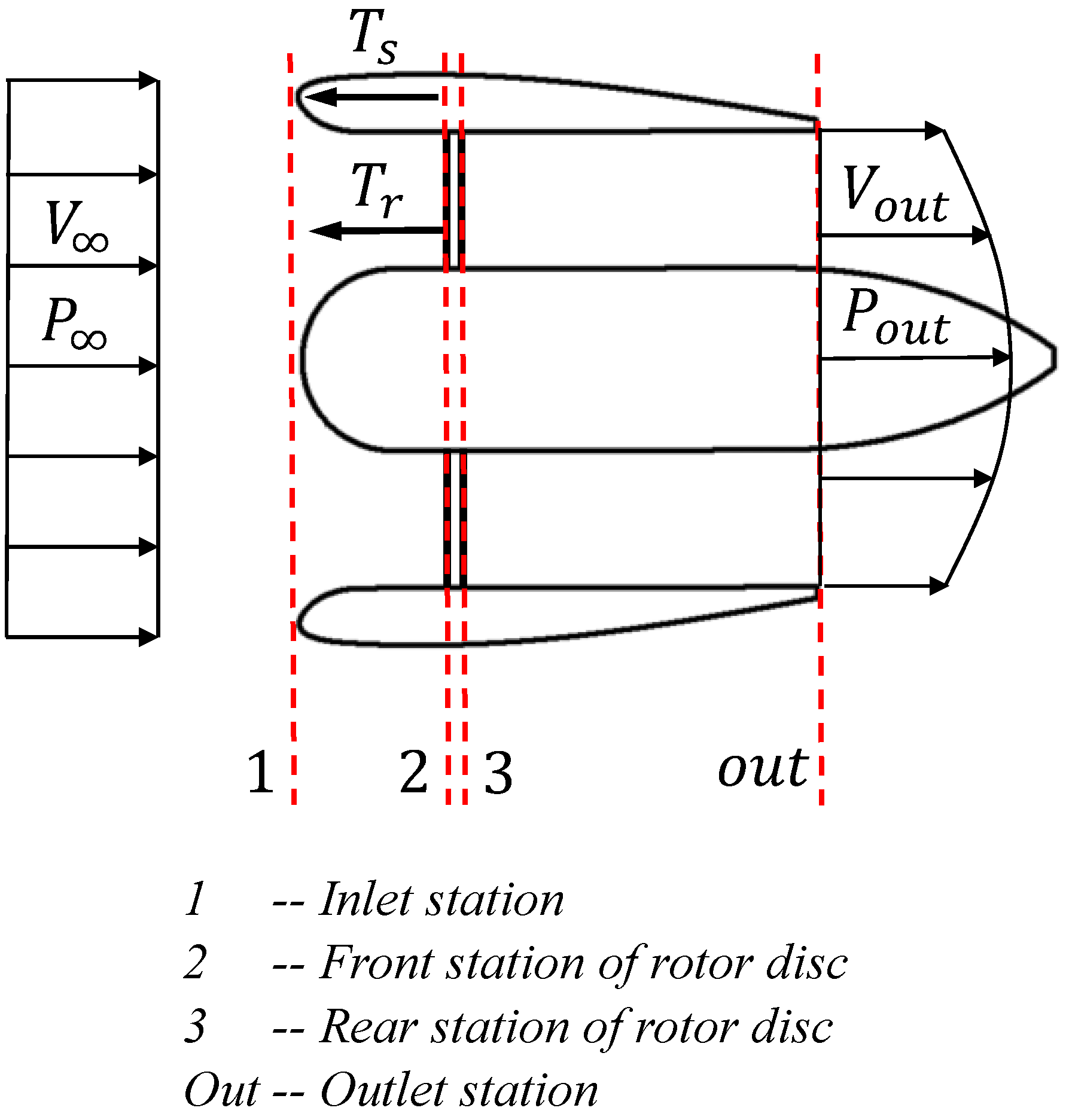
2.2.3. Model of Ducted Propellers
2.2.4. Dynamic Model
3. Method
3.1. ILQR Formulation
3.2. Global Trajectory Plan Based on ILQR
| Algorithm 1. Global trajectory plan based on ILQR |
| 1: Input |
| 2: System dynamics: |
| 3: Cost function: |
| 4: Tilt law: |
| 5: Initial control trajectory or law: |
| 6: Output |
| 7: Optimal control and state trajectory: |
| 8: Repeat |
| 9: Forward Pass |
| 10: Simulate the system dynamics (nth iteration) in a forward pass: |
| 11: |
| 12: Linearize the system dynamics along the trajectory : |
| 13: |
| 14: Quadratic Taylor expansion of cost function along : |
| 15: |
| 16: Backward Pass |
| 17: Based on Bellman’s principle, recursive computation in a backward pass: |
| 18: |
| 19: |
| 20: |
| 21: |
| 22: Line Search |
| 23: Repeat |
| 24: Update control law: |
| 25: Update state trajectory: |
| 26: Compute new cost: |
| 27: Update feedforward factor: |
| 28: Until found lower cost or maximum number of line search reached |
| 29: Until maximum number of iterations or cost function convergence |
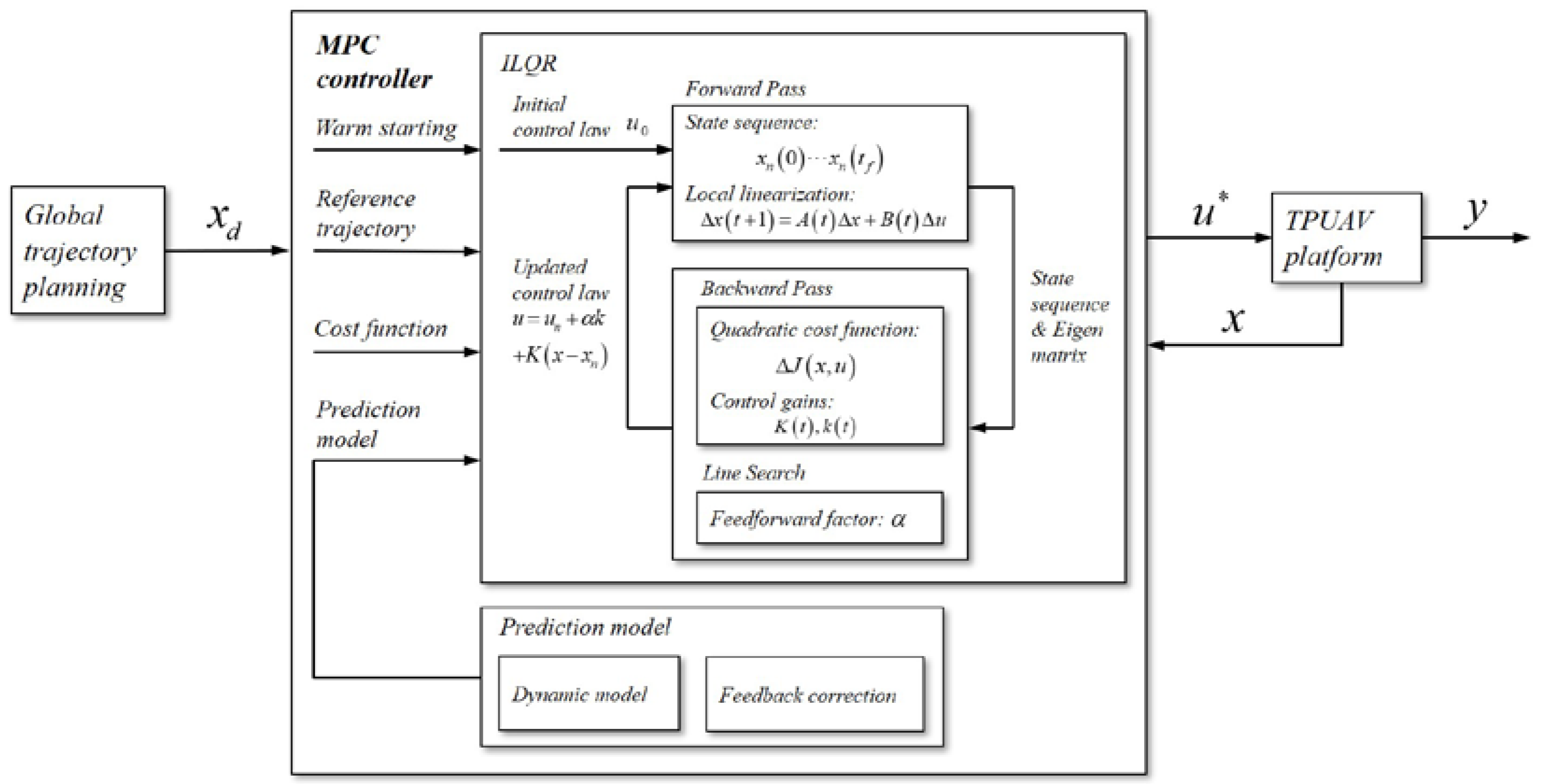
3.3. Finite Horizon Optimal Control Based on ILQR-MPC
| Algorithm 2. Finite horizon optimal control based on ILQR-MPC |
| 1: Input |
| 2: Reference trajectory: |
| 3: optimal state trajectory (produced by global trajectory planning) |
| 4: System dynamics: |
| 5: Cost function: |
| 6: Tilt law: |
| 7: Output |
| 8: Optimal control: |
| 9: Repeat |
| 10: Warm starting |
| 11: Initial control trajectory: |
| 12: Run ILQR (similar to Algorithm 1) |
| 13: Prediction horizon |
| 14: Weight matrixes |
| 15: Feedback compensation |
| 16: Prediction model compensation: |
| 17: Until terminal time |
4. Results
4.1. Simulation System Description
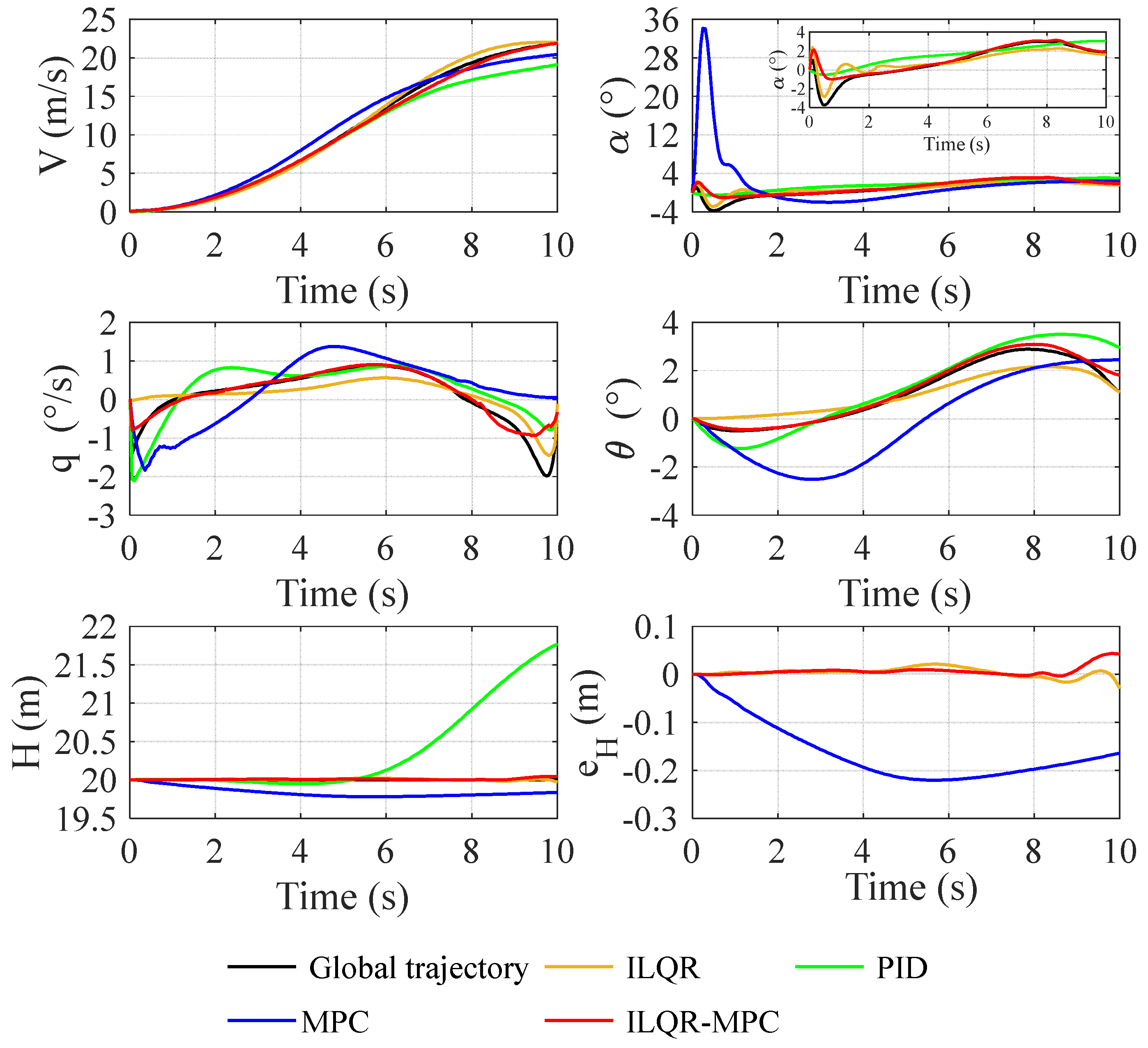
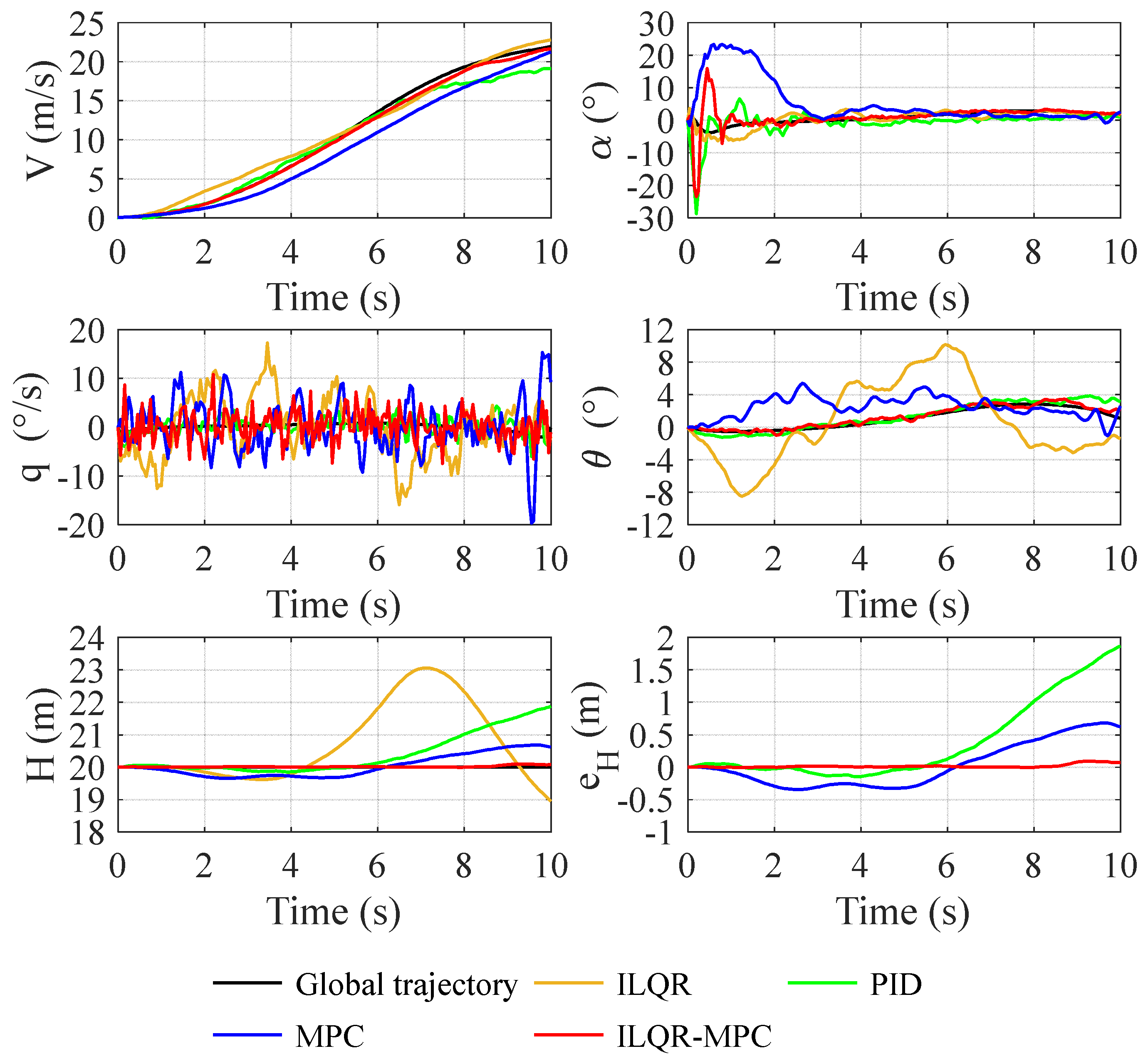
4.2. Main Results
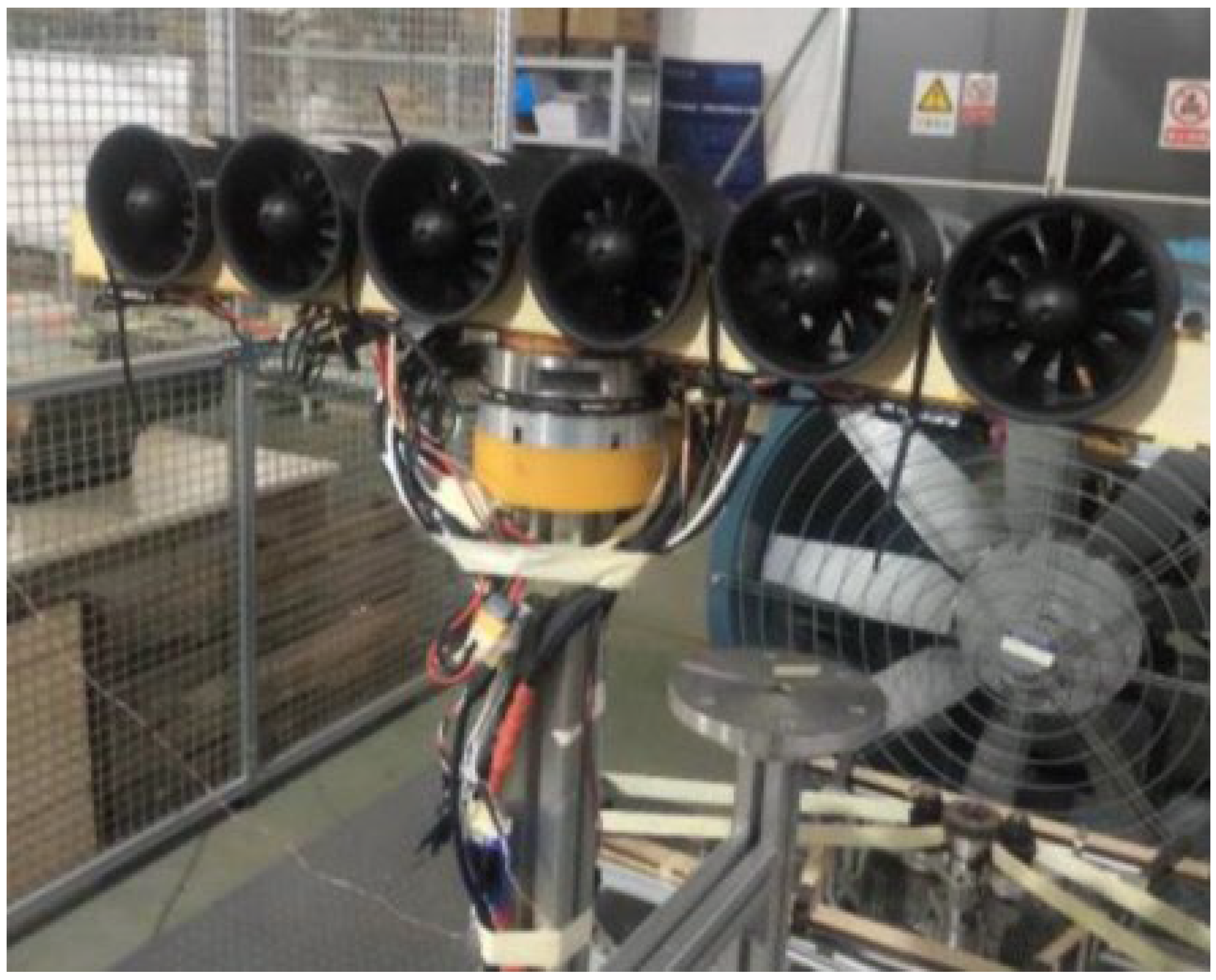
4.3. Implementation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, T.; Barakos, G.N. Toward Vehicle-Level Optimization of Compound Rotorcraft Aerodynamics. AIAA J. 2021, 60, 1937–1957. [Google Scholar] [CrossRef]
- Xia, J.Y.; Zhou, Z.; Xu, D.; Wang, Z. Aerodynamic/Propulsion Coupling Model of Vector Electric Propulsion System. Acta Aeronaut. Astronaut. Sin. 2022, 25, 1–12. Available online: http://kns.cnki.net/kcms/detail/11.1929.V.20220829.1342.002.html (accessed on 1 September 2022).
- Ducard, G.J.; Allenspach, M. Review of designs and flight control techniques of hybrid and convertible VTOL UAVs. Aerosp. Sci. Technol. 2021, 118, 107035. [Google Scholar]
- Yang, Y.J.; Zhu, J.H.; Wang, X.Y.; Yuan, X.; Zhang, X. Dynamic Transition Corridors and Control Strategy of a Rotor-Blown-Wing Tail-Sitter. J. Guid. Control. Dyn. 2021, 44, 1836–1852. [Google Scholar] [CrossRef]
- Cardoso, D.N.; Esteban, S.; Raffo, G.V. A new robust adaptive mixing control for trajectory tracking with improved forward flight of a tilt-rotor UAV. ISA Trans. 2021, 110, 86–104. [Google Scholar] [CrossRef] [PubMed]
- Liu, N.J.; Cai, Z.H.; Wang, Y.X.; Zhao, J. Fast level-flight to hover mode transition and altitude control in tilt-rotor’s landing operation. Chin. J. Aeronaut. 2021, 34, 181–193. [Google Scholar] [CrossRef]
- Hartmann, P.; Meyer, C.; Moormann, D. Unified Velocity Control and Flight State Transition of Unmanned Tilt-Wing Aircraft. J. Guid. Control. Dyn. 2017, 40, 1348–1359. [Google Scholar] [CrossRef]
- Li, B.Y.; Sun, J.X.; Zhou, W.F.; Wen, C.-Y.; Low, K.H.; Chen, C.-K. Transition Optimization for a VTOL Tail-sitter UAV. IEEE/ASME Trans. Mechatron. 2020, 25, 2535–2545. [Google Scholar] [CrossRef]
- Liu, H.; Peng, F.C.; Lewis, F.L.; Wan, Y. Robust Tracking Control for Tail-Sitters in Flight Mode Transitions. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2023–2035. [Google Scholar] [CrossRef]
- Cakici, F.; Leblebicioglu, M.K. Control System Design of a Vertical Take-off and Landing Fixed Wing UAV. IFAC-Pap. Online 2016, 49, 267–272. [Google Scholar] [CrossRef]
- Wang, Z.G.; Zhao, H.; Duan, D.; Jiao, Y.; Li, J. Application of improved active disturbance rejection control algorithm in tilt quad rotor. Chin. J. Aeronaut. 2020, 33, 1625–1641. [Google Scholar] [CrossRef]
- Quan, Q.; Fu, R.; Li, M.X. Practical Distributed Control for VTOL UAVs to Pass a Virtual Tube. IEEE Trans. Intell. Veh. 2022, 7, 342–353. [Google Scholar] [CrossRef]
- Liu, Z.; Theilliol, D.; Yang, L.; He, Y.; Han, J. Observer-based linear parameter varying control design with unmeasurable varying parameters under sensor faults for quad-tilt rotor unmanned aerial vehicle. Aerosp. Sci. Technol. 2019, 92, 696–713. [Google Scholar] [CrossRef]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O.M. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Papachristos, C.; Alexis, K.; Tzes, A. Hybrid model predictive flight mode conversion control of unmanned quad-tiltrotors. In Proceedings of the IEEE European Control Conference (ECC), Zurich, Switzerland, 17–19 July 2013. [Google Scholar]
- Vukov, M.; Domahidi, A.; Ferreau, H.J.; Morari, M.; Diehl, M. Auto-generated Algorithms for Nonlinear Model Predicative Control on Long and on Short Horizons. In Proceedings of the 52nd IEEE Conference on Decision and Control, Firenze, Italy, 10–13 December 2013. [Google Scholar]
- Quirynen, R.; Vukov, M.; Zanon, M.; Diehl, M. Autogenerating Microsecond Solvers for Nonlinear MPC: A Tutorial Using ACADO Integrators. Optim. Control. Appl. Methods 2015, 36, 685–704. [Google Scholar] [CrossRef]
- Kamel, M.; Alexis, K.; Achtelik, M.; Siegwart, R. Fast nonlinear model predictive control for multicopper attitude tracking on SO(3). In Proceedings of the IEEE Multi-Conference on Systems and Control, Sydney, NSW, Australia, 21–23 September 2015. [Google Scholar]
- Papachristos, C.; Alexis, K.; Tzes, A. Dual-Authority Thrust-Vectoring of a Tri-TiltRotor employing Model Predictive Control. J. Intell. Robot. Syst. 2016, 81, 417–505. [Google Scholar] [CrossRef]
- Allenspach, M.; Ducard, G.J. Model predictive control of a convertible tiltrotor unmanned aerial vehicle. In Proceedings of the 28th Mediterranean Conference on Control and Automation (MED), Saint-Raphael, France, 15–18 September 2020. [Google Scholar]
- Manzoor, T.; Xia, Y.Q.; Zhai, D.-H.; Ma, D. Trajectory tracking control of a VTOL unmanned aerial vehicle using offset-free tracking MPC. Chin. J. Aeronaut. 2020, 33, 2024–2042. [Google Scholar] [CrossRef]
- Bauersfeld, L.; Spannagl, L.; Ducard, G.J.J.; Onder, C.H. MPC Flight Control for a Tilt-rotor VTOL Aircraft. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 2395–2409. [Google Scholar] [CrossRef]
- Mayne, D.Q. Differential Dynamic Programming—A Unified Approach to the Optimization of Dynamic Systems. Control. Dyn. Syst. 1973, 10, 179–254. [Google Scholar]
- Budhiraja, R.; Carpentier, J.; Mastalli, C.; Mansard, N. DDP for multi-phase rigid contact dynamics. In Proceedings of the IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018. [Google Scholar]
- Todorov, E.; Li, W.W. A generalized iterative LQG method for locally-optimal feedback control of constrained nonlinear stochastic systems. In Proceedings of the IEEE American Control Conference, Portland, OR, USA, 8–10 June 2005. [Google Scholar]
- Tassa, Y.; Mansard, N.; Todorov, E. Control-Limited Differential Dynamic Programming. In Proceedings of the IEEE International Conference on Robotics & Automation (ICRA), Hong Kong, China, 29 September 2014. [Google Scholar]
- Grandia, R.; Farshidian, F.; Ranftl, R.; Hutter, M. Feedback MPC for Torque-Controlled Legged Robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019. [Google Scholar]
- Dantec, E.; Taïx, M.; Mansard, N. First Order Approximation of Model Predictive Control Solutions for High Frequency Feedback. IEEE Robot. Autom. Lett. 2022, 7, 4448–4455. [Google Scholar] [CrossRef]
- Werle, M.J. Analytical Model for Ring-Wing Propulsor Thrust Augmentation. J. Aircr. 2020, 57, 901–913. [Google Scholar] [CrossRef]
- McCormick, B.W. Aerodynamics of V/STOL Flight; Dover Publications: Mineola, NY, USA, 1999. (In English) [Google Scholar]
- Werle, M.J. Analytical Model for Ring-Wing Propulsors at Angle of Attack. J. Aircr. 2022, 59, 1–12. [Google Scholar] [CrossRef]
- Lewis, R.I. Vortex Element Methods for Fluid Dynamic Analysis of Engineering Systems; Cambridge University Press: Cambridge, UK, 1991; pp. 191–227. [Google Scholar]
- Werle, M.J. Aerodynamic Loads and Moments on Axisymmetric Ring-Wing Ducts. AIAA J. 2014, 52, 2359–2361. [Google Scholar] [CrossRef]
- Bellman, R.R. Dynamic programming. Science 1966, 153, 34–37. [Google Scholar] [CrossRef] [PubMed]
- Neunert, M.; de Crousaz, C.; Furrer, F.; Kamel, M.; Farshidian, F.; Siegwart, R.; Buchli, J. Fast Nonlinear Model Predictive Control for Unified Trajectory Optimization and Tracking. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 9 June 2016. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1 | 0 | 0.1 | 1 | 10 | 100 | 100 | 10 | 50 | 0 | 5 | 5 | 500 |
| 1 | 0 | 0.1 | 1 | 10 | 20 | 20 | 2 | 5 | 0 | 0.5 | 0.5 | 50 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xia, J.; Zhou, Z. Model Predictive Control Based on ILQR for Tilt-Propulsion UAV. Aerospace 2022, 9, 688. https://doi.org/10.3390/aerospace9110688
Xia J, Zhou Z. Model Predictive Control Based on ILQR for Tilt-Propulsion UAV. Aerospace. 2022; 9(11):688. https://doi.org/10.3390/aerospace9110688
Chicago/Turabian StyleXia, Jiyu, and Zhou Zhou. 2022. "Model Predictive Control Based on ILQR for Tilt-Propulsion UAV" Aerospace 9, no. 11: 688. https://doi.org/10.3390/aerospace9110688
APA StyleXia, J., & Zhou, Z. (2022). Model Predictive Control Based on ILQR for Tilt-Propulsion UAV. Aerospace, 9(11), 688. https://doi.org/10.3390/aerospace9110688