Abstract
The safe and orderly integration of unmanned aircraft in the airspace is surely among the most difficult challenges to be solved in the near future. However, a safe and fluid traffic management on the ground is not less important and not less challenging, as completely different aspects have to be considered here. Much less work has been done yet to solve this question. In the frame of the project Surface Management Operations (SuMO), a procedural solution has been developed to enable fully integrated unmanned airport ground movements while allowing air traffic controllers to guarantee a safe, orderly and expeditious flow of traffic. This concept is based on the idea of segmented standard taxi routes for unmanned aircraft, while maintaining current procedures for manned aircraft. From 2017 to 2019, a two-stage validation campaign validated this new solution. No concerns regarding safety or human factors issues were revealed. Access and Equity, as well as Interoperability, were found to be very satisfying. A fast time simulation of mixed manned and unmanned traffic, using the proposed solution, was almost as efficient as pure manned traffic and can easily be implemented at medium-size airports. This article provides information about the experimental setup and the conduction of both validations stages, and illustrates obtained results. It closes with a discussion and an outlook.
1. Introduction
When having a closer look, as it is currently done in DLR’s internal project Transport 5.0 [1], it can be found that the current research on remotely piloted or unmanned (autonomous) aircraft has numerous similarities with the development of autonomous car driving. Both traffic domains are confronted with various, and in some cases almost identical, technical, safety and legal challenges to be solved. Moreover, millions are spent to push technical advances. The advantages that are desired to be exploited in both traffic domains are as follows [2]:
- Safety benefits, as the risk of human errors of the driver/pilot is reduced;
- Flexibility benefits, as especially for commercial use the constraints and regulations applicable to a human driver/pilot (e.g., maximum duty times) are not relevant any longer;
- Environmental benefits, as an autopilot can steer the vehicle more precisely and smoother than a human driver/pilot, avoiding unnecessary braking or acceleration;
- Cost benefits, as personnel and training costs are reduced;
- Capacity benefits, as safety buffers and minimum safety distances, that were introduced because of human precision, human attention and reaction capabilities, may be obsolete.
Another similarity between autonomous car driving and unmanned air traffic is that the same vehicle needs to be able to operate under different rulesets and in different situations, e.g., a fully autonomous car must be able to operate side by side with other autonomous and conventional cars on motorways and cross-country roads, but also in the city center or in a car park, on car ferries and so on. The only way to avoid this is to build up a separated infrastructure for autonomous cars, which might be feasible for small delivery robots like NURO [3] or on a very local level, but which is impossible for area-wide applications. In the same way, unmanned aircraft need to operate in a shared environment with other manned and unmanned aircraft. In the airspace, different airspace classes require the application of different rules [4], while on the other hand, also completely different rules are to be considered for ground movements. In contrast to autonomous car driving, operating unmanned aircraft in segregated areas in the air and on ground is at least a realistic option for small drones and large unmanned aircraft systems (UAS), but with several disadvantages [5]. Especially a serious impact on airspace or aerodrome capacity can be expected for UAS operations of the “certified” category according to the European Aviation Safety Agency (EASA) [6].
Various projects investigated the integration of unmanned aircraft into the airspace, while the integration into airport ground traffic was not yet well considered. In addition, most of these projects focus on a single remotely piloted aircraft system (RPAS) or UAS which is to be integrated. Keeping the goal of a commercial use in mind, this article presents a concept to enable the integration of a certain number of RPAS movements at the same time. Furthermore, experience has shown that changing rules and operating principles of aviation is a difficult, slow and lengthy process, which leads to the requirement that the introduction of new systems like RPAS or autonomous UAS must follow the principles of “migration tolerance” [7].
Even if the challenge of a safe integration into the airspace is solved, a prerequisite for commercial unmanned air traffic is a solution to safely integrate various unmanned aircraft into airport surface traffic. This solution should follow existing rules and procedures and should not require expensive modifications of the ground infrastructure.
Within the Single European Sky ATM Research Programme (SESAR) project PJ03a Surface Management Operations (SuMO) Solution 9, the German Aerospace Center (DLR) developed a first and simple concept on how the integration of unmanned aircraft can be achieved with segmented standard taxi routes. Supplementary to two preceding publications at the yearly Digital Avionics System Conferences (DASC) in 2018 and 2019 [8,9], this article gives a complete overview on the whole research activities done by DLR in PJ03a-09, providing numerous insights not yet published. This includes detailed human factors analysis conducted with pilots, air traffic controllers and remote pilots for the first (V1) validation cycle, as well as comprehensive qualitative feedback which is not yet contained in previous publications. For the second (V2) validation cycle, a quantitative controller task load and aerodrome resources utilization analysis is contained in this article.
2. Background
In general, completely different rules and traffic principles apply to ground movements of airplanes compared to those rules that are to be considered in the air [10]. Similar to road traffic, the freedom of safe airplane ground movements is restricted to the taxiway and apron dimensions. The navigation on these surfaces—in the sense of finding the right way, but also of moving the aircraft along the taxiway centerline—is done exclusively by visual contact to the ground from the cockpit windows. The same applies to the avoidance of collisions with obstacles, other aircraft or vehicles, as well as to the recognition of signals like red stop bar lights. As the relevant distances, e.g., the distance between two conflicting taxiing airplanes, are rather small, the three-dimensional visual recognition of the pilot may play an important role while reaction times are short. As one of the most essential points, taxi clearances given by air traffic control (ATC) may be complex, including a lot of parameters or conditions [11].
Consequently, ground movements of airplanes on an airport’s surface are currently relying much more on the abilities of a pilot on board, compared to other phases of flight. This leads to different challenges for a safe integration of RPAS into airport surface traffic. A detailed overview on these challenges is provided in Reference [8].
According to the knowledge of the authors, there are no mature technical solutions available that could fully reproduce the above-listed essential abilities of an on-board pilot for taxi movements. In the same way, there are also no worldwide standards or legal requirements defined yet. It is therefore on the one hand unknown which regulations have to be met and which equipment must be carried on board to get ground movements of unmanned airplanes side by side with manned ones approved and certified. On the other hand, it is not clear in which direction this situation evolves in the next years.
Currently, the following two options on how RPAS ground movements are realistically thinkable, taking latest aviation law and regulations into account [8,12]:
- (1)
- Full segregation:Similar to the establishment of temporary restricted areas reserved for UAS flights in the airspace, a full segregation on ground would mean that a part or the whole airport is exclusively reserved for this single movement while all other participants of the aerodrome traffic like other flights, vehicles or persons are required to hold/stay outside of the segregated area or at their parking positions. Although this is a legally feasible option which might be practicable on small airports with a low number of traffic movements, it has obvious disadvantages when applied on a hub airport.
- (2)
- Towing Operations:Aircraft that are towed by tugs are daily business in aviation, which is why this is currently the most realistic option for performing ground movements of UAS. Here, the driver of the towing truck takes over the responsibilities and activities that would traditionally be done by a pilot on board of the airplane when taxiing. The advantage of this procedure is that— apart from some recommended additional training for the airport ground handling personnel—it can directly be put into operation at least for isolated movements of unmanned airplanes. Expected disadvantages are the delay created during the detach/attach process and the demand in terms of additional personnel and equipment when thinking of commercial unmanned air traffic, making several flights of unmanned airplanes at the same time more likely.
In this article, these two options serve as baseline scenarios for the performed validation cycles.
3. Approach
To reach a certain level of detail for integration procedures and solutions, the integration concept must be simple and tolerant enough to be applicable for different near-future scenarios of air traffic. The easiest way to achieve this is to reduce system and performance requirements for the unmanned aircraft to an absolute minimum instead of assuming specific abilities of the unmanned aircraft, whose deployment is uncertain, for example high-definition video link or mature standardized detect-and-avoid systems. In addition, the integration concept shall follow existing rules for manned aviation as far as possible and thus avoid the change of existing standard procedures and rules for any traffic participant.
Therefore, the integration concept introduced in this article aims for a pure procedural solution to enable mixed manned and unmanned air traffic on ground of an airport. Every ground movement of an airplane could be described by a route, a speed profile and a time when the movement shall commence. Furthermore, there are several ways how these parameters could be allocated to a flight. In manned aviation, this is usually done by issuing taxi clearances, including a target position on the aerodrome, a route, optionally several restrictions or conditions like giving way to other traffic and speed advisories. The taxi command itself can be indirectly understood as trigger for the movement at the same time. The advantage is that this taxi guidance method allows for maximum flexibility: Depending on the traffic, changes on short notice are possible for de-conflicting, changing the aircraft sequence or for expediting the traffic flow. The disadvantage is that taxi clearances given by voice communication are relatively complex, might leave room for misunderstandings and do not tolerate higher latencies.
However, it is quite obvious that—in order to successfully develop a working integration concept for unmanned traffic on the airport surface—the first step is to reduce complexity of taxi guidance, expecting a probable loss of flexibility and aerodrome capacity to a certain extent. The solution that is taken here is based on procedures already applied for manned aircraft on some aerodromes, e.g., Antalya Airport, Turkey [13]. A detailed explanation of the approach and this procedure is provided in Reference [8], wherein the main idea is as follows:
- Define the taxi route from stand to the active runway as published standard route to unmanned aircraft instead of an allocation via direct ATC-pilot communication (red dashed line in Figure 1).
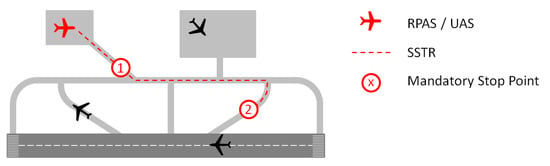 Figure 1. Sketch of a remotely piloted aircraft system (RPAS) taxi out movement using the proposed procedure. UAS = unmanned aircraft systems; SSTR = Segmented Standard Taxi Routes.
Figure 1. Sketch of a remotely piloted aircraft system (RPAS) taxi out movement using the proposed procedure. UAS = unmanned aircraft systems; SSTR = Segmented Standard Taxi Routes. - Implement published mandatory stop points along the taxi route for unmanned aircraft, splitting it into taxi route segments (red numbered circles in Figure 1).
- Let the ground controller approve the movement along every route segment by giving a simple trigger command instead of a whole clearance, e.g., from parking spot to (1) and then from (1) to (2) in Figure 1.
Although a certain loss of flexibility and aerodrome capacity compared to pure manned traffic can be expected, this solution does nevertheless offer numerous advantages and may therefore be the best option available with current aviation standards to enable integrated manned and unmanned aerodrome traffic:
- The need for direct communication between ATC and the unmanned aircraft is reduced to simple trigger commands. This allows the use of any communication means which can address and submit such a simple signal, reducing the risk of implications of any communication cutbacks to a minimum.
- As the procedure is simple and clearly defined, the risk of errors and misunderstandings, as well as the risk of serious consequences of malfunctions, are brought to a minimum.
- The procedure is very predictable and transparent to ATC and all other aerodrome traffic participants.
- A high level of automation for the ground movement of the unmanned aircraft is possible.
- Due to the mandatory stop points, a natural safety net for all kinds of non-nominal situations is implemented as the unmanned aircraft would stop at the next mandatory stop point at the latest, provided it is still able to precisely taxi along the taxiway centerline (e.g., in case of a loss of the command and control link).
In the following, this procedure is called Segmented Standard Taxi Routes (SSTR).
4. Validation and Results
From 2017 to 2019, the SSTR concept has been comprehensively validated in a two-stage validation cycle, following the European Operational Concept Validation Methodology (E-OCVM) [14]. The first stage took place in October 2017 and was performed as a gaming workshop [15]. The second stage, representing a V2 validation, was then performed as fast-time simulation in spring 2019. Different key performance areas (KPAs) and key aspects were targeted in both stages:
- Safety, Access and Equity, Human Performance and Interoperability were addressed in the V1 stage;
- Capacity, Environmental Impact and Flight Efficiency were addressed in the V2 stage.
For both validation stages, the airport of Stuttgart, Germany (International Civil Aviation Organization (ICAO) Code: EDDS), was used as operational environment. According to Reference [15], Stuttgart airport can be considered as a primary node airport with a single runway and a non-complex airport layout. Its traffic composition comprises civil and few military flights of mainly fixed-wing, but also rotary-wing aircraft. During peak situations the aerodrome uses 70–90% of its total runway capacity. In 2017, the airport counted 117939 flight movements in total [16].
In both validation cycles, the focus was not on a single RPAS surface movement but on the integrated manned and unmanned traffic as a whole.
The SSTR procedure (Solution) scenario was compared to two Baseline scenarios and a Reference scenario:
- The Baseline 1 scenario used full segregation to enable the unmanned aircraft movement on the aerodrome, as described in Section 2.
- The Baseline 2 scenario used towing operations for unmanned aircraft ground movements.
- The Reference scenario used manned operations only (added for comparison in second validation stage only).
Ground movements from off-block to wheels-off for departures and from touchdown to on-block for arrivals were considered, as the integration of RPAS into the airspace around the airport was out of scope of this project. More information is given in the next sections.
4.1. First Validation Stage—Gaming Workshop
4.1.1. Overview and Objectives
In accordance with the V1 requirements defined by Reference [14], the SSTR procedure was validated in the first validation cycle in a “gaming” workshop. Here the idea was to “play” through different traffic constellations and situations with defined pre-conditions resembling the research questions, together with invited operational experts.
The overall goal of this validation cycle was to get the very-first experts’ feedback from different stakeholders regarding the feasibility and practicability of the SSTR solution, as well as collecting further key research questions for the next validation cycle.
Based on the definition of the KPAs, the key research questions that were addressed in the first cycle with respect to the baseline scenarios and the new SSTR procedure were as follows [15]:
- To which degree do the procedures guarantee a continuously high level of safety?
- What are additional safety risks compared to pure manned aviation, if there are any?
- To which degree do the procedures provide all aerodrome users the same level of access to the aerodrome infrastructure and the aerodrome control service?
- To which degree is equity ensured for all aerodrome users when applying the procedures?
- To which degree do the procedures comply with existing aviation standards?
- To which degree do the procedures imply additional workload to controllers and pilots?
- To which degree do the procedures imply any risk of a loss of situational awareness to controllers and pilots?
4.1.2. Experimental Setup
The mentioned “gaming” workshop, which was the chosen method for performing the first validation cycle, was conducted on 21 to 23 November 2017 and led by DLR at their premises in Cologne, Germany. Several operational experts were invited to take part in this workshop:
- Two pilots of commercial aviation (in the following referred to as “conventional pilots”);
- Two pilots of military unmanned aircraft (in the following referred to as “RPAS pilots”);
- One civil aerodrome controller;
- One military aerodrome controller with RPAS experiences;
- One ATM expert from an Air Navigation Service Provider.
The last three participants of this list are in the following referred to as air traffic controllers (ATCOs).
The workshop comprised several steps:
- (1)
- Introduction and E-OCVM basics,
- (2)
- Gaming session Baseline 1 and Baseline 2,
- (3)
- Detailed presentation of the SSTR concept and related procedures,
- (4)
- Discussion and questions,
- (5)
- Gaming session “RPAS arrival using the SSTR procedure”,
- (6)
- Gaming session “RPAS departure using the SSTR procedure”,
- (7)
- Gaming sessions “non-nominal situations” (lost communication, lost command and control link),
- (8)
- Summary and closure.
Every gaming session was conducted in two phases: the gaming phase itself and the subsequent assessment phase. During the gaming phase, the first author of this article supervised the play through every single step of the RPAS movement, as well as the analysis and discussion by the workshop participants. This was done by presenting an airfield layout, while the position of the remotely piloted aircraft (RPA), ATC actions and possible effects on the surrounding traffic were animated. Sample screenshots are shown in Figure 2. Different traffic constellations were also taken into account.

Figure 2.
Example of an animated sequence of a traffic situation as it was used in the gaming workshop (Black aircraft = RPAS, red line = segmented standard taxi route, yellow star = mandatory stop point for RPAS, blue aircraft = manned aircraft, light blue line = current taxi clearance of the manned aircraft). Aerodrome map provided by courtesy of DFS Deutsche Flugsicherung GmbH—not suited for navigational purposes.
The assessment phase was done by interviewing the participants and by using standard and tailor-made questionnaires to determine several indicators. More information is given in the next section.
4.1.3. Measurements and Indicators
The KPAs Safety, Interoperability and Access and Equity were covered in this validation phase. In addition, Human Performance issues [17] were considered. This was done by using standard and tailor-made questionnaires as indicated below. Each participant filled the questionnaires once per gaming session, and from the perspective of his own profession and working experience. In addition, interview techniques were used to collect qualitative feedback.
In detail, the mentioned KPAs were considered:
- Safety was covered by (1) a tailor-made questionnaire with a focus on ATC, comprising 7 different questions regarding safety tasks and safety risks, which were filled by the two aerodrome controllers and the air traffic management (ATM) expert; (2) a tailor-made questionnaire with a focus on conventional pilot’s work, comprising 5 different questions regarding safety tasks and safety risks, which was filled by the two conventional pilots; (3) a tailor-made questionnaire with a focus on RPAS pilot’s work, comprising 4 different questions regarding safety tasks and safety risks, which was filled by the two RPAS pilots; and (4) a general estimation of the perceived overall level of safety of the respective scenario on a scale from 1 (not safe) to 10 (maximum safety), by all participants, from their professional perspective.
- Interoperability was covered by a general estimation of the perceived level of compatibility with existing standards, respectively the level of necessity for regulatory adaptations of the respective scenario on a scale from 1 (not compatible/maximum effort needed) to 10 (maximum compatibility/no effort needed), by all participants, from their professional perspective.
- Access and Equity was covered by a general estimation of the perceived level of access and equity on a scale from 1 (maximally detrimental handling between manned and unmanned) to 10 (fully equal treatment between manned and unmanned), by all participants, from their professional perspective.
- Human Performance was covered by (1) answering the Assessing the Impact on Mental Workload (AIM-s) questionnaire [18], (2) answering the Situation Awareness for SHAPE questionnaire (SASHA) [19]; (3) answering the SHAPE Automation Trust Index questionnaire (SATI) [20]; and (4) by a general estimation of the perceived level of additional demand on human factors resources, like workload or mental capacity, compared to pure manned aviation, on a scale from 1 (unacceptable high additional demand) to 10 (no additional demand), by all participants, from their professional perspective.
The answers were recorded anonymously. Only the appropriate role (ATCO, conventional pilot, RPAS pilot) was taken into account for results analysis.
4.1.4. Results
Safety
(a) Tailor-Made Questionnaire Answered by ATCOs
The following tables display the individual questions of the tailor-made questionnaire and the average answers given by ATCOs regarding nominal (Table 1) and non-nominal scenarios (Table 2). The following Likert Scale was used for all questions: (1) = strongly disagree, (2) = disagree, (3) = neutral, (4) = agree and (5) = strongly agree. The term “this procedure” refers to the new SSTR concept.

Table 1.
Results of tailor-made questionnaires related to safety in nominal situations, answered by air traffic controllers (ATCOs).
Table 2.
Results of tailor-made questionnaires related to safety in non-nominal situations (loss of command and control link, and loss of communication), answered by ATCOs.
(b) Tailor-Made Questionnaire Answered by Pilots
The following tables display the individual questions of the tailor-made questionnaire and the average answers given by conventional pilots regarding nominal (Table 3) and non-nominal scenarios (Table 4). The following Likert Scale was used for all questions: (1) = strongly disagree, (2) = disagree, (3) = neutral, (4) = agree and (5) = strongly agree. The term “this procedure” refers to the new SSTR concept.
Table 3.
Results of tailor-made questionnaires related to safety in nominal situations, answered by conventional pilots.
Table 4.
Results of tailor-made questionnaires related to safety in non-nominal situations (loss of command and control link, and loss of communication), answered by conventional pilots.
(c) Tailor-Made Questionnaire Answered by RPAS Pilots
The following tables display the individual questions of the tailor-made questionnaire and the average answers given by RPAS pilots regarding nominal (Table 5) and non-nominal scenarios (Table 6). The following Likert Scale was used for all questions: (1) = strongly disagree, (2) = disagree, (3) = neutral, (4) = agree and (5) = strongly agree. The term “this procedure” refers to the new SSTR concept.
Table 5.
Results of tailor-made questionnaires related to safety in nominal situations, answered by RPAS pilots.
Table 6.
Results of tailor-made questionnaires related to safety in non-nominal situations (loss of command and control link, and loss of communication), answered by RPAS pilots.
(d) Estimation of Safety Level
The results of this inquiry have been comprehensively published in Reference [8]. Summarized, the level of safety was estimated on the average as very high for all scenarios, i.e., Baseline 1, Baseline 2 and SSTR (average value 9.05 on a scale from 1 to 10). All ratings from ATCOs, RPAS pilots and conventional pilots differ marginally.
(e) Collected Qualitative Feedback
The workshop participants found that the current safety risks, which already exist in manned aviation, will still exist in an integrated manned–unmanned traffic, but no additional safety risks are introduced when applying the SSTR procedure.
From the ATC perspective, it would be beneficial to have an “emergency stop” button for all taxiing RPA in case an unmanned flight does not comply with a mandatory stop point.
Regarding non-nominal situations, one ATCO had safety concerns for the case that the communication failure is caused on ATC side and not on aircraft side. In this case, the pilots of the manned aircraft cannot be informed about taxiing unmanned aircraft accordingly. Another safety risk would be that the RPAS experiencing a communication loss has no possibility to communicate other additional emergencies besides the communication loss. The same situation would occur in case of manned aircraft, so this was not considered an additional safety risk. In any case, no matter if a non-nominal situation occurs with a manned or an unmanned aircraft, these flights shall be handled with extreme care, and detailed information and instructions should, in any case, be contained in the local aerodrome emergency plan.
One conventional pilot saw an additional safety risk when the RPAS experiences a loss of the Command and Control (C2) link when already lined up on the runway. This RPA would then block this runway, meaning that it would not be available for several minutes for a possible emergency landing of a manned aircraft. However, this problem is not specific to the SSTR procedure.
RPAS pilots did not see any additional safety risk in nominal or non-nominal conditions. Due to the possibility to use a landline between ATC and the remote pilot as backup communication channel, which is not available for manned aircraft, safety would even be improved in case of lost communication situations.
There was no doubt that safety was guaranteed at all times for Baseline 1 and Baseline 2 scenarios by all participants.
Interoperability
(a) Estimation of Interoperability Level
The results of this inquiry have been comprehensively published in Reference [8]. Summarized, the level of interoperability was estimated to be very high and almost equal for Baseline 2 and SSTR scenarios (average value 9.71 resp. 8.76 on a scale from 1 to 10). In contrast to this, Baseline 1 was rated to provide a very low level of interoperability (average value 2.86 on a scale from 1 to 10).
(b) Collected Qualitative Feedback
As a general comment, without a direct link to the SSTR procedure, RPAS pilots highlighted that the RPAS, including the remote pilot, shall always be considered as one working system. Following this approach, it is not necessarily required that specific abilities must be reproduced by a technical system when it is also possible to enable the remote pilot to perform this task with some technical support.
Regarding the SSTR procedure, the concrete communication channel between ATC and the RPAS still must be defined. When restricting this communication to a simple “go” command, as foreseen by the SSTR concept, other aerodrome traffic participants may lose their traffic situational awareness, which is currently provided by the open voice radio communication. However, as the same problem is also introduced with the increasing use of data link technology like Controller-Pilot Data Link Communication (CPDLC), a change of this paradigm is ongoing from fully transparent communication toward individual communication with full trust in ATC. In any case, the ATC–RPAS communication must be clear and unambiguous, which is fully guaranteed by the SSTR procedure.
The PRAS pilots stated that the idea of standard taxi routes is very compatible with the way how RPAS taxi movements are conducted from the remote pilot’s side in the future, i.e., following a defined sequence of waypoints on ground. In addition, it eases flight preparation and orientation on an airport’s surface.
The Baseline 1 scenario is seen by the tower controllers as very comparable to a state visit, e.g., the arrival of the US president at a civil airport. Therefore, the same serious impact on airport capacity, delays and airline schedules can be expected.
The Baseline 2 scenario, which is towing operations, is already a standard procedure for military RPAS ground movements, as well as for civil aircraft staying overnight or similar situations.
Access and Equity
(a) Estimation of Access and Equity Level
The results of this inquiry have been comprehensively published in Reference [8]. Summarized, the level of access and equity was estimated to be very high and almost equal for Baseline 2 and SSTR scenarios, (average value 8.71 resp. 8.79 on a scale from 1 to 10). In contrast to this, Baseline 1 was rated to provide a very low level of access and equity (average value 1.86 on a scale from 1 to 10).
(b) Collected Qualitative Feedback
Regarding the Access and Equity KPA, ATCOs were concerned about the fact that, especially shortly after the SSTR procedure has become operational, it will take some time until ATC staff gets used to it. RPAS ground movements using the SSTR procedure might unintentionally be advantaged over manned aircraft, and additional safety buffers might be implemented, which may cause a little delay for manned aircraft during this initial period.
In general, it must be clarified with which level of priority RPAS flights will be treated in which situation, but as there are no humans on board of these flights, it would be natural and can be expected that unmanned aircraft will have the lowest priority of all air traffic participants.
The Baseline 1 scenario was seen by all participants as the worst case, showing the maximum imbalance between manned and unmanned flights in terms of access and equity, and should therefore not be understood as a realistic option for operational implementation any more.
The Baseline 2 scenario was rated slightly better by the RPAS pilots compared against the SSTR procedure, as towing operations still provide a totally free access to any position on the aerodrome at any time for an unmanned aircraft, while the lateral movement is more restricted for the SSTR procedure.
Human Performance
(a) Impact on Mental Workload (AIM-s)
The AIM-s questionnaire is a standard questionnaire specific to ATCO workload. It contains a standardized set of 16 questions, using a seven-point Likert Scale from 0 (=no impact) to 6 (=extreme impact). The final result of this questionnaire is determined by calculating the average over all questions [18]. The lower the average score, the lower the overall impact on mental workload is.
As this questionnaire is specific to ATC, it was just filled by all participating ATCOs per scenario. The results are displayed in Figure 3.
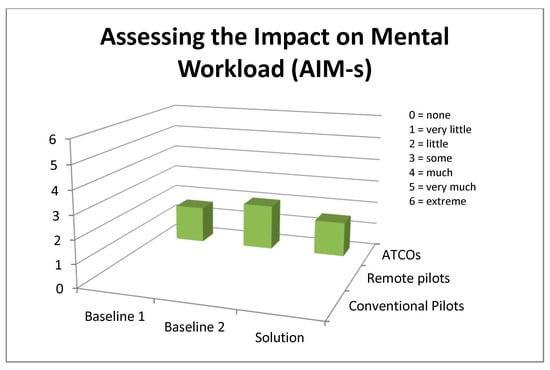
Figure 3.
Results of AIM-s questionnaire per scenario, answered by ATCOs.
(b) Situational Awareness (SASHA)
The SASHA questionnaire is a standard questionnaire specific to situational awareness. It contains a standardized set of six questions, using a seven-point Likert scale from 0 (=never) to 6 (=always). The final result of this questionnaire is determined by calculating the average over all questions [19]. The higher the average score, the higher the level of situational awareness is.
This questionnaire was filled by all participants, per scenario, from their professional perspective. The results are displayed in Figure 4.
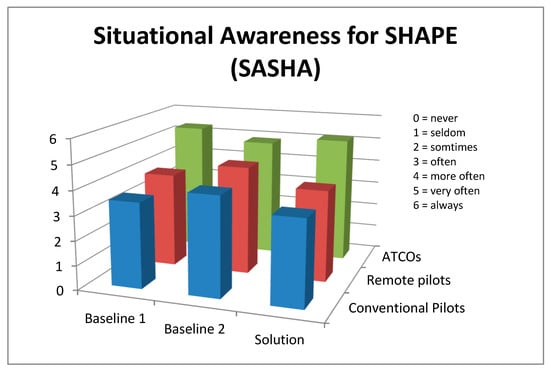
Figure 4.
Results of SASHA questionnaire, per scenario, per expert group.
(c) Trust in Automation (SATI)
The SATI questionnaire is a standard questionnaire specific to trust in automation. It contains a standardized set of six questions, using a seven-point Likert scale from 0 (=never) to 6 (=always). The final result of this questionnaire is determined by calculating the average over all questions [20]. The higher the average score, the higher the trust in the procedure is.
This questionnaire was filled by all participants, per scenario, from their professional perspective. The results are displayed in Figure 5.
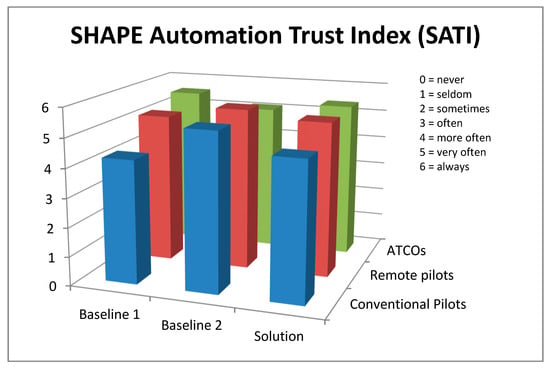
Figure 5.
Results of SATI questionnaire, per scenario and expert group.
(d) Estimation of Human Performance Level
The results of this inquiry were comprehensively published in Reference [8]. Summarized, the demand on human factors was rated almost equal for all three scenarios, on average, with only slight differences. Nevertheless, the Baseline 1 scenario was rated most demanding for ATCOs and conventional pilots, but least demanding for remote pilots. For all participants, the Baseline 2 scenario was rated slightly better than the SSTR procedure (average value 8.71 against 8.00 on a scale from 1 to 10).
(e) Collected Qualitative Feedback
All participants did not express any concerns regarding their mental workload, situational awareness or other human factors aspects, both for arrival or departure operations, as well as in nominal or non-nominal conditions.
For ATC, an increased workload is to be expected in any case, including the Baseline 2 and the SSTR scenario. An appropriate training is recommended, as this can help to get familiar with the new situation and procedures.
The two conventional pilots just highlighted that it might cause some level of frustration, when manned aircraft are required to hold on a taxiway because of an RPAS movement, no matter if it is towed or using the SSTR procedure. In general, they still see the participation of unmanned aircraft in commercial airport traffic in a skeptical way.
4.1.5. V1 Validation Summary
In this section, the results presented above are summarized.
Safety
All three scenarios are considered by the participants to ensure safety on an almost equal level. This conclusion is underlined by all applied assessment methods in the same way. Safety is seen as maintained for all three scenarios, compared to pure manned aviation.
Interoperability
The Baseline 2 and SSTR scenarios provide a high level of interoperability. The Baseline 2 scenario was rated even higher than the new SSTR procedure, because towing operations are basically daily airport business, implying no change to the existing ATM system and standard procedures at all. In strong contrast, the Baseline 1 scenario achieved very low ratings, as high impact on current aerodrome capacity and traffic flow is expected.
As a conclusion, the Baseline 1 scenario is not considered to be a realistic option at medium size or larger airports. However, the Baseline 2 and SSTR scenarios are seen as equally suited. The only point to be regulated is the detailed communication means between ATC and the RPAS.
Access and Equity
For this KPA, the results are very similar to the Interoperability KPA. The Baseline 2 and SSTR scenarios provide a high and very comparable level of access and equity. The Baseline 1 scenario achieved very low ratings, as a free access to the aerodrome infrastructure is not possible for an RPAS when manned aircraft are taxiing, and vice versa. As the traffic share between manned and unmanned aircraft is not balanced (it can be expected that in the near future there will always be much more manned traffic movements than unmanned ones), there will often be the situation that several manned aircraft will have to wait for one single RPAS movement when applying the Baseline 1 scenario. For the Baseline 2 and SSTR scenarios, it must be regulated which level of priority will be applied when handling RPAS flights.
As a conclusion, the Baseline 1 scenario is again not considered to be a realistic option at medium-size or larger airports. Baseline 2 and SSTR scenarios are seen as equally suited here, too.
Human Performance
From an ATCO’s perspective, all three scenarios (Baseline 1, Baseline 2 and SSTR) show a small to very small impact on mental workload. The highest impact is expected for Baseline 2 (towing operations), as the towing vehicles are additional traffic participants moving on the taxiways and subject to aerodrome control. However, the ATCO workload is not seen as an issue.
Moreover, for the ATCO’s situational awareness, no difficulties are expected for any of the three scenarios. All of them were rated to provide “very often” to “always full” situational awareness about the traffic situation. The highest rating was given for Baseline 1, which is because the traffic is clearly separated here and therefore most orderly.
In terms of trust, again all three scenarios were rated high. The Baseline 2 scenario was rated marginally lower than Baseline 1 and SSTR, because drivers of towing trucks sometimes get only basic trainings on how to communicate with ATC, and how to behave as an aerodrome traffic participant on the maneuvering area.
Summarizing the ATCO’s perspective, no human performance issue is seen for all three scenarios. It is recommended that ATCOs receive an appropriate training, to further reduce the impact of RPAS integration.
From the conventional pilots’ perspective, the situational awareness ratings are not as high as the ATCO ratings, but still positive for all three scenarios. An explanation could be that the demand for situational awareness about the current traffic situation is lower for conventional pilots, especially on controlled aerodromes, compared to ATCOs. The lowest rating was given for the Baseline 1 scenario. Baseline 2 and SSTR are rated almost equal and higher than Baseline 1.
The same results were obtained for the trust index. Again, Baseline 1 got the worst (but still a positive) rating, which leads to the conclusion that the scenario works from a pilot’s perspective, but there are still doubts if this will lead to a smooth flow of air traffic.
From the perspective of the RPAS pilots, the situational awareness was rated the highest for the Baseline 2 scenario, as the ground movement is conducted by the driver of the towing truck and therefore is less complex for the RPAS pilot. The SSTR and Baseline 1 scenarios were rated almost equally high. All three scenarios were rated positively, so no issue could be found here.
The same results were obtained again for the trust index. Here, the ratings are in principle only marginally higher than for situational awareness. Similar to the situational awareness assessment, the SSTR and Baseline 1 scenarios were rated almost equally high. All three scenarios were rated positively for trust, too.
Intermediate Conclusion for V1 Validation Phase
As an overall conclusion for the V1 validation phase, the following was found:
- The Baseline 1 scenario is not considered to be a realistic option, as the impacts on aerodrome capacity and the flow of aerodrome traffic are enormous.
- The Baseline 2 and SSTR scenarios are equally suited and promising RPAS integration concepts on an aerodrome surface, according to the investigated KPAs Safety, Interoperability, and Access and Equity, as well as human performance aspects. Based on these results, a clear preference and decision, which scenario is better suited to integrate RPAS into surface traffic, depends on other KPAs or aspects.
Following these findings, the V2 validation phase should set the focus on KPAs’ capacity, efficiency, aerodrome resources and ATC workload, as the biggest impact was expected there for the following reasons:
- The attaching/detaching processes required in the Baseline 2 scenario are blocking the concerned taxiways for several minutes, which might create an additional loss of aerodrome capacity compared to SSTR.
- The attaching/detaching processes required in the Baseline 2 scenario should lead to extended taxi times and maybe also a reduced maximum runway throughput, compared to SSTR.
- Especially with bigger RPAS traffic shares (25% or more), the need for additional towing trucks and drivers in the Baseline 2 scenario should be considerable. Or, on the other hand, with the same number of towing trucks, the traffic performance should decrease with increasing RPAS traffic share more seriously than in the SSTR scenario.
- The towing trucks moving along the taxiway system are subject to ATC, which should lead to an increased ATC task load, compared to SSTR.
To assess how big the impact in these KPAs compared to pure manned aviation is, fast time simulations were proposed for the second validation stage.
4.2. Second Validation Stage—Fast Time Simulation
4.2.1. Overview and Objectives
In Reference [21], several success criteria were determined to evaluate a potential benefit of the SSTR procedure. To be considered a success, the solution must meet the following criteria (as compared to the Reference scenario):
- Shall not decrease airport capacity;
- Enables the same runway throughput;
- Shall not increase fuel consumption and emissions.
Furthermore, fewer additional aerodrome resources shall be required in the SSTR solution, compared to Baseline 2.
Thus, the second stage of the validation aimed at addressing the feasibility of the concept by comparing defined operational scenarios, based on their performance. With this in mind, performance indicators need to be determined by using a method like Fast-Time Modeling, which enables the collection of numerous output data that “are best used to test the sensitivity of a proposed concept to different assumptions and scenarios” [14] (p. 49).
4.2.2. Experimental Setup
To model basic principles of the SSTR concept in a lab environment, the key features of the concept have to be identified first. To be considered an appropriate tool, the Fast-Time Simulation (FTS) should be capable of representing all of these features, at least to a certain extent:
- RPA are only allowed to taxi along (preferably unidirectional) standard taxi routes that are segmented by implementing mandatory holding points at taxiway hotspots or before crossing a runway.
- Taxi clearances are issued by ATC separately for each segment, as soon as it is ensured that the segment is clear and will remain clear of other traffic.
- RPA having received a clearance for the subsequent segment while taxiing will omit the next mandatory stop.
- Other traffic has to hold before entering a segment used by an RPA, or has to taxi behind this RPA.
To be able to compare the SSTR concept with Baseline 2, the modeling of towing vehicles, including their ground movement, as well as attaching and detaching procedures, is required too.
With its user-defined rules unique for the modeling task, Simmod PRO! is considered a candidate for conducting the simulation experiments. Since all of the simulation inputs can be created and modified by the user, such things as new procedures for air and ground operations can be modeled straightforward. Additionally, limiting resources, like a limited number of available trucks, can be defined [22]. The software has been successfully applied to assess runway capacity, taxi time and delay (see [23]), as well as special operational procedures, e.g., aircraft de-icing described in Reference [22].
Finally, a model of Stuttgart airport was prepared by using Simmod PRO! Since the investigation focuses on ground operations, a runway, a taxiway network layout and aprons with aircraft stands were created. Most of the airport’s aircraft stands are located north of the runway near the terminals (labeled as “Ramp” in Figure 6). To minimize interaction with commercial traffic, RPA are assumed to solely use a special cargo apron area in the southern part of the airport. The surrounding airspace was modeled through a simplified Terminal Maneuvering Area (TMA), including a final approach path, departure route and traffic pattern per runway direction (07 and 25). This setup was used to separate traffic and to let aircraft perform missed approach maneuvers, if necessary.
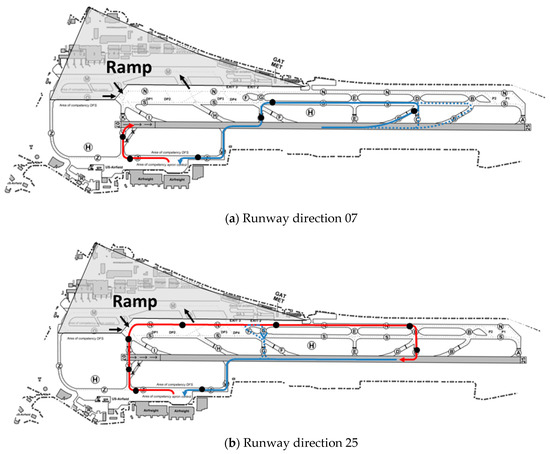
Figure 6.
Predefined taxi routings at Stuttgart Airport allocated to RPA in case runway direction (a) 07 or (b) 25 is in use (Reference [9]). Aerodrome map provided by courtesy of DFS Deutsche Flugsicherung GmbH—not suited for navigational purposes.
Taxi routes dedicated to RPA are generated for Baseline 2 and Solution, grouping consecutive segments on the taxiway network (see Figure 6). Red lines illustrate routes used by departing RPA, whereas blue indicates a usage in case of being an arrival. Dotted lines show optional routings that will be activated in cases of congestion along the default routes. Depending on the runway direction in use and taxiway layout constraints, in some cases, RPA taxi routes were shared with manned traffic. Following the SSTR concept idea, mandatory holding points for RPA were added along those RPA taxi routes in the Solution scenarios (indicated as black dots in Figure 6). Due to their stand allocation and the fact that perimeter taxiway Z is solely used by military aircraft, arriving RPA exiting to the north or departing from runway 25 needed to cross the runway.
A traffic sample was derived from EUROCONTROL’s Demand Data Repository (DDR2) that included 302 flights at Stuttgart Airport on 1 November 2018. Based on these data, RPA scenarios were created by substituting the aircraft type of a predefined amount of flights, keeping the planned block times. In doing so, RPA were randomly distributed over the day, assuming incremental steps of 10%, 25% and 50% total traffic share.
Finally, 14 simulation scenarios = ((two unmanned (Baseline 2 and Solution) × three RPA traffic shares) + one Reference) × two runway directions had to be analyzed for nominal traffic situations.
4.2.3. Measurements and Indicators
Output data derived from the simulation runs were aggregated to determine the corresponding performance indicators. With respect to environmental impact, simulation output was post-processed with additional models/formulas, dedicated to fuel and emission calculation.
- Capacity is covered by calculating hourly runway throughput for arrivals and departures. For this purpose, for each simulation scenario, aircraft touchdown times and take-off run begin times were recorded, counted per hour and diagrammed over the day. Taxi-in and taxi-out times, including delays, were recorded per flight and aggregated per simulation scenario. As a third capacity related indicator, aircraft were counted at 3 min intervals, based on their actual state and position on the airport. The interval was set to be lower than the lowest average taxi time to cover as many movements as possible. The output data were then statistically analyzed, determining median, mean and mode of observations per run. These parameters were used as an indicator with regard to task load and aerodrome resource utilization, especially related to ATC.
- Environmental Impact: Airports, in general, affect the environment through the operation of their functional elements in different areas. Runways and taxiways, as parts of the airport’s infrastructure and ground traffic, relate to, e.g., climate change, local air quality or noise [24]. For the purpose of this investigation, environmental impact is covered by assessing fuel consumption and emissions. In terms of emissions, CO2 contributes to climate change, whereas NOx is a factor impacting local air quality. Fuel consumption is needed as an interim result, enabling the emission computations. Based on the flight phase and engine specifications of the aircraft, fuel and emissions are calculated in kg per flight and aggregated per simulation scenario.
4.2.4. Results
Capacity
The assessment of runway throughput and taxi times is discussed in detail in Reference [9]. As a main conclusion, no significant differences in runway throughput between Reference, Baseline 2 and Solution scenarios became apparent. Furthermore, the results show that operating different amounts of RPA does not noticeably increase taxi times on average. At a first glance, this finding appears to be counterintuitive, as there are additional events like mandatory stop-and-go maneuvers in the SSTR procedure of the Solution, or tug attaching/detaching procedures in Baseline 2. Due to the applied method of substituting a manned flight with an unmanned flight, the nominal taxi distance of the substitute unmanned flight differ, depending on the formerly allocated aircraft stand of the manned flight and the runway direction in use. Thus, resulting taxi times vary; scenarios with runway 07 in use have a greater variation in taxi times than scenarios with runway 25 in use. Finally, [9] considers both towing operations and the SSTR procedure feasible solutions.
Table 7 lists a detailed statistical analysis of aircraft (a/c), counted every 3 min between 5:00 a.m. and 11:00 p.m. local time (remark: no traffic demand outside this interval). For each scenario, the median, mean and mode were calculated from the numbers of aircraft being counted on the airport’s taxiway system, but not on the runway and not parked at the stand. Column n refers to the total number of observations (aircraft counted) per simulation run.
Table 7.
Aircraft on ground statistics per simulation scenario.
In general, there seems to be a difference depending on runway direction in use. When comparing both Reference scenarios (runway 07 and runway 25 in use), numbers counted for runway direction 25 tend to be equal or slightly higher (see mean of 1.99 compared to 1.66 or mode of 2 compared to 1). That can be explained with the taxi distance aircraft’s need to travel. Lining up runway 25 from the north differs from lining up runway 07 by the length of the runway. Assuming that the landing roll of an aircraft in most cases does only occupy a certain part of the runway length, the corresponding difference is significantly smaller. Taken together, aircraft are facing a greater nominal taxi distance when runway direction 25 is in use. This applies to the taxi routings defined for the RPA, too, although the difference is greater. As aircraft’s taxi performance is identical across all aircraft types and scenarios, a longer distance consequently increases the time the aircraft spends in the simulation and thus the probability to be counted.
The imbalance within the runway directions could also be observed for Baseline 2 and Solution. In comparison, the Solution always shows lower n and lower means, in runway direction 07 in some cases approximately identically to the Reference. With an increasing share of RPA, an overall top mean of 2.76 in runway direction 25 with 50% RPA was observed in Baseline 2.
To further differentiate output derived from the simulations, the authors created a frequency distribution. Figure 7 shows the corresponding histogram of aircraft being counted on the ground. Results for runway direction 07 are displayed above the x-axis and those for runway direction 25 below the x-axis. Simulation scenarios are indicated by color (white = Reference, orange = Baseline 2 and blue = Solution); transparency is used to indicate the share of RPA in three steps (brightest tone = 10%, intermediate = 25% and full tone = 50% RPA). This calculation can be used as a direct indicator for controller task load.
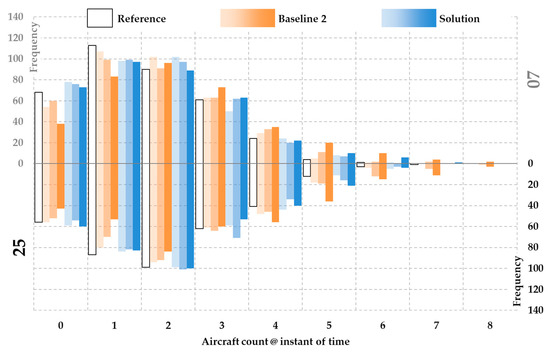
Figure 7.
Aircraft on-ground frequency distribution (both runway directions).
Up to five aircraft at one time could be counted in each simulation run in both runway directions. Higher counts are observed only in a subset of runs; noticeable frequency values especially occur in Baseline 2 scenario runs with a higher RPA share. Compared to the Reference, simulation runs of scenarios including RPA show their peak frequencies at equal or higher aircraft counts (represented by the mode; see Table 7).
The results described for Baseline 2 are mainly influenced by the time an RPA is waiting for a tug to become available, plus the inherent attaching and detaching times. As each simulation run was conducted with a defined number of tugs, this number appeared to be a main factor triggering the results of Baseline 2.
Environmental Impact
Results concerning environmental impact were comprehensively published in Reference [9]. Fuel consumption and emissions showed higher values in the Solution compared to Baseline 2. The number of tugs available just for RPA towing also correlates with fuel consumption, as it influences the overall distance tugs operate. In sum, according to Reference [9], towing operations in Baseline 2 cause the lowest environmental impact, but the Solution is at least not worse than today’s Reference.
4.2.5. V2 Validation Summary
Concluding the V2 validation in terms of ATC task load and aerodrome resource utilization, it can be stated that operating RPA can increase the probability of having a higher number of aircraft on the taxiway system simultaneously requiring the attention of the ATCO. Especially when additional vehicles are involved (e.g., tugs), traffic tends to be more complex. Adjusting the number of available tugs can be used to operate this complexity by reducing, e.g., the time an RPA spends waiting for a tug after having vacated the runway. However, it can be seen that the Baseline 2 scenario seems to lead to a higher increase in ATC task load compared to the SSTR scenario, which confirms the expectations at the end of V1 validation activities (see Section 4.1.5). On the other hand, the SSTR scenario seems to imply almost no increase in terms of ATC task load compared to the Reference scenario; and the observed differences between both are not as clear as between Baseline 2 and Reference.
5. Conclusions
As an overall conclusion for both validation phases, it can be said that the Baseline 1 scenario, which is a full RPAS segregation on the airport surface, is not considered as a realistic option for medium-size airports with the complexity and traffic amount of Stuttgart Airport.
Concerning the Baseline 2 scenario (RPAS towing operations) and the SSTR scenario, it was found that both are suitable and practicable in principle for this airport category. For RPAS traffic shares of 10% or less, both options provide almost equal levels of safety, interoperability, access and equity, capacity and efficiency, as well as human performance aspects, especially in terms of ATC task load and controller workload. The differences to pure manned traffic are measurable, but significantly smaller than expected. Due to the technical setup, the Baseline 2 scenario produced less emissions and less fuel consumption, so the environmental impact is lower than expected.
For higher RPAS traffic shares, the new SSTR concept showed a better performance in terms of ATC task load and aerodrome resources than Baseline 2. In detail, Baseline 2 produces a higher number of vehicles to be controlled by ATC; and the number of available towing trucks definitely becomes a limiting factor.
As a final conclusion and recommendation, the Baseline 1 scenario should only be taken into account for very small airports with very limited resources and very low traffic demand. The Baseline 2 scenario and the SSTR procedure can both be well used to integrate RPAS into the surface traffic of medium-size airports similar to Stuttgart airport. However, for larger RPAS traffic shares (more than 10%) and/or for airports with a higher traffic demand, the SSTR procedure should clearly be preferred.
Author Contributions
Conceptualization, supervision and project administration, M.F.; methodology, validation, formal analysis and writing, M.F. and S.L. All authors have read and agreed to the published version of the manuscript.
Funding
This project has received funding from the SESAR Joint Undertaking under the European Union’s Horizon 2020 research and innovation program under grant agreement number 734153.
Acknowledgments
We would like to thank our former colleague, Nikolai Okuniek, for coordinating this research activity for DLR until his leave and for significantly contributing to the success of performed experiments with his great engagement and expertise.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References and Note
- Transport 5.0—Cross-Domain Coordinated, Self-Organised Traffic. Available online: https://www.dlr.de/content/en/articles/digitalisation/digitalisation-project-transport-5-point-0.html (accessed on 4 June 2020).
- OECD International Transport Forum. Automated and Autonomous Driving; OECD International Transport Forum: Paris, France, 2015. [Google Scholar]
- Nuro—The Self-Driving Vehicle Made for Local Goods Transportation. Available online: https://nuro.ai/product (accessed on 2 March 2020).
- European Commission. Regulation No. 923/2012, SERA.5001-SERA.8005. Available online: https://www.easa.europa.eu/regulations#regulations-sera---standardised-european-rules-of-the-air (accessed on 2 March 2020).
- International Civil Aviation Organization (ICAO). German Activities related to remotely piloted aircraft systems. In Proceedings of the Twelfth Air Navigation Conference, Montreal, QC, Canada, 19–30 November 2012. [Google Scholar]
- European Aviation Safety Agency (EASA). Introduction of a Regulatory Framework for the Operation of Unmanned Aircraft; EASA: Cologne, Germany, 2015; pp. 18–29. [Google Scholar]
- Ohneiser, O.; Gürlük, H. Migration Tolerant Human Computer Interaction for Air Traffic Controllers. In International Conference on Human Interface and the Management of Information; Part of Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8017, pp. 143–152. [Google Scholar]
- Finke, M.; Okuniek, J.N. Using Segmented Standard Taxi Routes to Integrate Unmanned Aircraft Systems at Civil Airports. In Proceedings of the 37th Digital Avionics System Conference, London, UK, 23–27 September 2018. [Google Scholar]
- Okuniek, J.N.; Finke, M.; Lorenz, S. Assessment of Segmented Standard Taxi Route Procedure to Integrate Remotely Piloted Aircraft Systems at Civil Airports using Fast-Time Simulations. In Proceedings of the 38th Digital Avionics System Conference, San Diego, CA, USA, 8–13 September 2019. [Google Scholar]
- European Commission. Regulation No. 923/2012, SERA.3210 d). Available online: https://www.easa.europa.eu/regulations#regulations-sera---standardised-european-rules-of-the-air (accessed on 2 March 2020).
- International Civil Aviation Organization (ICAO). Procedures for Air Navigation Service Providers—Air Traffic Management, 15th ed.; ICAO Doc 4444; ICAO: Montreal, QC, Canada, 2007; pp. 12–19. [Google Scholar]
- Helm, S.; Gerdes, I.; Kreuz, M.; Schwoch, G.; Temme, A. Unmanned Freight Operations (UFO) Project—Phase 1. D3.2—Aerodrome Operations; German Aerospace Center (DLR): Braunschweig, Germany, 2018. [Google Scholar]
- Aeronautical Information Publication (AIP) Turkey. AD 2 LTAI-14, 12th Sept 2019.
- EUROCONTROL. European Operational Concept Validation Methodology (E-OCVM); Version 3.0; EUROCONTROL: Brussels, Belgium, 2010; Volume I. [Google Scholar]
- Riccardi, G.; Okuniek, N.; Finke, M.; Perrotta, L.; Duca, G. SESAR Joint Undertaking. Solution 03a-9 Validation Plan (VALP) for V1; Sesar Joint Undertaking: Brussels, Belgium, 2017; pp. 91–116. [Google Scholar]
- DFS Deutsche Flugsicherung GmbH. Annual Report 2018. Available online: https://www.dfs.de/dfs_homepage/en/Press/Publications/DFS%20Annual%20Report%202018_EN.pdf (accessed on 12 March 2020).
- International Civil Aviation Organization (ICAO). Human Factors in Air Traffic Control; Circular 241-AN/145; ICAO: Montreal, QC, Canada, 1993. [Google Scholar]
- SESAR Joint Undertaking. HP Repository. Assessing the Impact on Mental Workload (AIM). Available online: https://ext.eurocontrol.int/ehp/?q=node/1587 (accessed on 12 March 2020).
- SESAR Joint Undertaking. HP Repository. Situation Awareness for SHAPE (SASHA). Available online: https://ext.eurocontrol.int/ehp/?q=node/1609 (accessed on 12 March 2020).
- SESAR Joint Undertaking. HP Repository. SATI—SHAPE Automation Trust Index. Available online: https://ext.eurocontrol.int/ehp/?q=node/1594 (accessed on 12 March 2020).
- Okuniek, N.; Peces, S.; Montero, P.; Flores, A.; Bueno, J.; Riccardi, G.; Paino, M.; Montefusco, C.; Duca, G. SESAR Joint Undertaking. Solution 03a-9 Validation Plan (VALP) for V2—Part I; Sesar Joint Undertaking: Brussels, Belgium, 2019; pp. 105–107. [Google Scholar]
- Bertino, J.; Boyajian, E.; Johnson, N. 21st Century, Fast-time Airport and Airspace Modeling Analysis with Simmod. Manag. Skies 2011, 9, 21–23. [Google Scholar]
- Özdemir, M.; Çetek, C.; Usanmaz, Ö. Airside Capacity Analysis and Evaluation of Istanbul Ataturk Airport Using Fast-Time Simulations. Anadolu Univ. J. Sci. Technol. A Appl. Sci. Eng. 2018, 19, 153–164. [Google Scholar] [CrossRef]
- Gómez Comendador, V.F.; Arnaldo Valdés, R.M.; Lisker, B. A Holistic Approach to the Environmental Certification of Green Airports. Sustainability 2019, 11, 4043. [Google Scholar] [CrossRef]







© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).