Abstract
Current investigations into urban aerial mobility, as well as the continuing growth of global air transportation, have renewed interest in Conflict Detection and Resolution (CD&R) methods. With the new applications of drones, and the implications of a profoundly different urban airspace, new demands are placed on such algorithms, further spurring new research. This paper presents a review of current CR methods for both manned and unmanned aviation. It presents a taxonomy that categorises algorithms in terms of their approach to avoidance planning, surveillance, control, trajectory propagation, predictability assumption, resolution manoeuvre, multi-actor conflict resolution, considered obstacle types, optimization, and method category. More than a hundred CR methods were considered, showing how most work on a tactical, distributed framework. To enable a reliable comparison between methods, this paper argues that an open and ideally common simulation platform, common test scenarios, and common metrics are required. This paper presents an overview of four CR algorithms, each representing a commonly used CR algorithm category. Both manned and unmanned scenarios were tested, through fast-time simulations on an open-source airspace simulation platform.
1. Introduction
Continued growth of aviation has been considered a threat to the current approach to air traffic control already for decades, inspiring research into automated tools and alternative approaches since the early 1990s. As a result, several large research programs have been formed along this theme, such as FREER [1], PHARE [2], and the Mediterranean Free Flight [3] project in Europe, and DAG/TM [4] in the US. More recently, there are the American NextGen programme [5] and SESAR [6] in Europe. This research has been primarily characterised by the proposed degree of centralisation (delegation to the flight deck or maintaining centralisation), and along the dimension from tactical separation to strategic (re)planning. An extensive review of methods by Kuchar and Yang [7], published in 2000, is still cited often as an overview of Conflict Detection and Resolution (CD&R) methods.
In recent years, the prospect of a wide range of drone operations, and the application of different aerial vehicles in an urban setting, have renewed interest in CD&R research. There are, however, several aspects that set these applications apart from the concepts considered in previous research. The capabilities of new platforms such as drones are different, and operating in an urban environment introduces new constraints (such as obstacles and hyperlocal weather) that did not need to be considered before. In addition, should the most ambitious concepts, such as drone-based package delivery and personal aerial mobility, become a reality, these applications will face traffic densities that are well beyond anything considered for manned aviation. Already, the Federal Aviation Administration (FAA) has ruled that an Unmanned Aerial Vehicle (UAV) must have Sense and Avoid capability in order to be allowed in the civil airspace [8]. Additionally, the International Civil Aviation Organization (ICAO) requires UAV CD&R methods to be capable of detection and avoidance in both static and non-static environments. Only after meeting this requirement, will civil-UAVs be allowed to fly beyond the operator’s visual line-of-sight [9].
Following these developments, many new CD&R concepts have been proposed since Kuchar and Yang’s review study [7], including an entirely new branch of CD&R methods directed specifically at unmanned aviation. A possible taxonomy for the latter was first explored by Jenie [10]. To include these new methods, and to incorporate the changed demands that are placed on CD&R algorithms by the new application areas, this paper aims to present a current overview of CD&R methods for both manned and unmanned applications. It will evaluate both manned and unmanned CD&R methods jointly in one single taxonomy, where methods are categorised in terms of their approach to avoidance planning, surveillance, control, trajectory propagation, predictability assumption, resolution manoeuvre, multi-actor conflicts, obstacle types considered, optimization, and method category. The goal is for this framework to be used when developing new methods, or when identifying the most suitable method for a specific situation. As a result, this study may be considered an extension of the work performed by Kuchar and Yang [7] and Jenie [10], by providing a more complete analysis of CR methods combining both manned and unmanned aviation. In addition, this paper provides a direct overview of the performance for the main identified CR method categories. While many publications relating to new CR methods include an evaluation of the proposed method, comparison between such studies based on their individual results is often impossible, due to the differences in approach taken in the evaluations. Furthermore, studies that present a comparison of multiple CR methods under the same conditions do not yet exist. Such evaluations, however, are essential for a fair comparison between methods, as performance is highly dependent on factors such as the employed simulation platform, scenarios, and metrics. To foster repeatable evaluations and fair comparisons, use should be made of publicly available simulation tools, open data, and common scenarios and metrics. This study therefore employs the open-source, multi-agent ATC simulation tool BlueSky [11]. The obtained experimental results are used to identify the differences in performance between manned and unmanned environments, as well as which CR methods are more efficient in the developing unmanned aviation world.
2. Taxonomy for Conflict Detection & Resolution Methods
CR methods can be evaluated by a combination of several factors which define the airspace environment. In this review, we evaluate methods according to the following ten characteristics: The timescale on which avoidance planning takes place, the type of surveillance, whether control is centralised or distributed, trajectory propagation, predictability assumption, manoeuvre employed for resolution, approach to multi-actor (>2) conflicts, obstacle types, optimisation objective, and method category. These categories are divided between detection and resolution as per Table 1 and Table 2, respectively. For each category, the possible variations are presented underneath. More detail is provided in the next subsections.

Table 1.
Taxonomy of conflict detection categories.
Table 2.
Taxonomy of conflict resolution categories.
2.1. Surveillance
Aircraft surveillance can be defined in terms of whether the aircraft is dependent on external systems, or on its own on-board systems (i.e., independent). Within the former, an additional distinction can be made based on origin of the data: A centralised system receives data from a common station, whereas a distributed processes information from the surrounding traffic.
For centralised dependent surveillance (Figure 1a), aircraft are equipped with transponders capable of responding to ground interrogation. Ground sensors determine the 2D position of the aircraft, and altitude is provided by the aircraft. In manned aviation, this is done by ATC, and aircraft are expected to cooperate by broadcasting their altitude and identity. Distributed dependent surveillance (Figure 1b) uses the ADS-B system; aircraft broadcast their position, altitude, identity, and other parameters by means of a data link, without any intervention from ground systems.
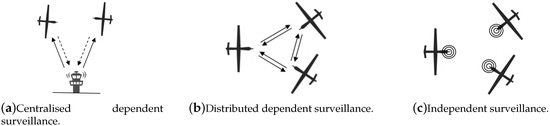
Figure 1.
Different types of surveillance.
Independent surveillance (Figure 1c) is more commonly referred to as Sense and Avoid and uses on-board non-cooperative systems/sensors. As unmanned aviation has no broadcast standard system, it commonly resorts to this type of surveillance with on-board sensors which detect both static and dynamic obstacles. It is not employed in manned aviation, however, as aircraft are expected to cooperate through the ADS-B system.
2.2. Trajectory Propagation
Future trajectories of an aircraft can be considered based on their current state (i.e., state-based) or their future intent (i.e., intent-based). The former assumes a straight line as continuation from the current state, whereas the latter assumes turns, and changes in heading and speed, based on the future waypoints of the aircraft.
State-based methods assume a straight-line projection of the aircraft’s current position and velocity vector. In comparison, intent informed can be simulated as a series of straight leg segments. Yang [12] has shown that reducing a non-linear trajectory to a series of straight lines trajectories allows for accurate computation of conflict states at speeds feasible in real-time complex scenarios. A state-based projection is naturally simpler and faster computationally, as intent requires data transmission and heavier computational processing. However, when future trajectory changes of all involved aircraft are not taken into account, false alarms may occur and future losses of separation, resulting from changes in trajectory, may be overlooked. On the other hand, when conflict resolution is put in place, as aircraft diverge from their initially intended trajectory in order to avoid intrusions, new false alarms are also introduced when considering intent. Research performed for singular cases in the past identified the potential of using intent. Multiple works [12,13,14,15] have used waypoint information to improve a single intruder’s trajectory prediction. Using both state and intent information in high traffic densities was investigated for civil aviation [16,17], improving overall safety. The previous works showed, additionally, that adopting rules disallowing pilots from turning into a conflict prevents intrusions resulting from sudden aircraft manoeuvres nearby. Such can help mitigate the need for intent information. In manned aviation, distributed sharing of future trajectory change points (TCPs) can be done through ADS-B. For unmanned aviation, there is still no research on how this could be performed.
2.3. Predictability Assumption
A conflict is found once it is identified that two aircraft will be closer that the minimum required separation at a future point in time. This process thus require an estimation of the future positions of all aircraft, and it differs on whether uncertainties are added to the trajectory propagation. A nominal assumption (Figure 2a) does not consider uncertainties (i.e., uncoordinated behaviour from other traffic, unknown wind or state variation). A worst-case assumption (Figure 2b) considers all possible trajectory changes resulting from uncertainties. However, this is impractical in a real-environment, as its complexity results in a heavy computation. Instead, a middle term, a probabilistic assumption (Figure 2c) is more often employed. In this case, the likelihood of each possible trajectory change is taken into account based on the current position, and maximum turn and climb rates. Whether to act, and how to act, is decided based on the most likely trajectories.
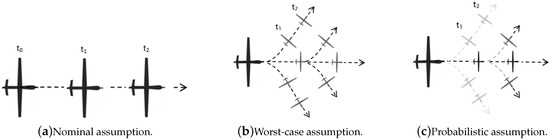
Figure 2.
Different types of predictability assumption methods.
The nominal assumption is often used in favour of simplicity and good computational performance. This assumption is mostly used with shorter look ahead times (i.e., a few minutes), and can be quite accurate in an environment where aircraft have a steady behaviour. However, accuracy is expected to decrease as the model looks further into the future, as multiple small unexpected changes could have accumulated into a significant change in the trajectory. As a result, alarms predicted far into the future are more likely to be unreliable.
Incorporating uncertainties may improve accuracy; as more potential trajectories are considered, the more likely it is that one will resemble the real observed position into the future. However, this is at the cost of more false positive alarms which are detected in the other trajectories that the aircraft could have taken. Adding more future states of neighbouring aircraft also reduces manoeuvring space. The further you look ahead, the larger the uncertainty space is and smaller the manoeuvring is expected to be, which reduces traffic mobility. It may even reach a situation where no conflict resolution manoeuvre is found, as there is no manoeuvre which avoids all conflicts. A probabilistic assumption provides a solution; fewer trajectories are accounted for depending on their likelihood. This likelihood threshold may be decided based on the number of alarms the model can process within a limited amount of time.
2.4. Control
Separation management, or control, may be centralised when decisions regarding future trajectory and conflict resolution are computed in a centralised location for multiple aircraft, or distributed when each aircraft is responsible for its own conflict avoidance. Both approaches rely on a communication network to broadcast information such as intent, trajectories, and priorities.
A centralised system is capable of providing a global solution to complex multiple-actor problems. Uncertainty is reduced as each aircraft follows the solution defined by the centralised agent. Centralised methods typically work towards optimizing trajectories; finding non-intersecting trajectories will guarantee separation. These centralised approaches are often computationally heavy, as a result of having to consider several possible manoeuvres for a number of aircraft, and may therefore not be suitable for real-time implementation when this number increases considerably [18]. Hypothetically, when all information (the traffic situation, but for instance also flight-specific optimisation preferences) is known and there is sufficient processing power, a centralised approach will lead to the most optimal solution. As all trajectories are known, these can be optimized for all involved aircraft. However, in practice, the demands on the availability of information and the speed of information transfer must be taken into consideration. The availability of optimisation-related information is often limited by the willingness of airlines to share it. The prediction horizon tends to be much larger due to the time it takes to generate and communicate a global solution. Computational intensity increases with the traffic density, thus there is a limit on the number of aircraft a centralised approach can operate simultaneously. Additionally, a single processing point is also a single point of failure, resulting in a central failure mode with global consequences, which is absent in distributed systems.
In manned aviation, ATC is the centralised point responsible for guaranteeing safety of all traffic. Air traffic controllers maintain minimum separation between all aircraft in their airspace sector. Naturally, the traffic density allowed in the sector is thus limited by the maximum number of aircraft that controllers are capable of operating simultaneously. One objective of CD&R research is to reduce the constraint on ATC, whether by creating another centralised point capable of computing optimal trajectories for all involved aircraft without human aid, or distributed systems to be introduced into the on-board systems of each aircraft. In particular, the uprising of unmanned aviation applications, where the number of involved aircraft are expected to greatly exceed the number currently operated by ATC [19], has prompted the exploration of distributed approaches.
A distributed system reallocates the process of separation assurance from a centralised point to the individual aircraft. As each aircraft only takes into account its neighbouring aircraft when avoiding conflicts, each distributed avoidance system is expected to have only a fraction of the computational strain a centralised system would have. Nonetheless, the speed at which an aircraft can make a decision is still limited by the speed at which information from surrounding traffic is received and processed. A crucial disadvantage of a distributed system is the lack of global coordination from surrounding traffic which may impair safety. Without knowledge of the movement of intruders, decentralised solutions cannot guarantee globally optimal solutions when more than two aircraft are involved. Because of this, the efficiency of decentralisation in resolving multi-actor conflicts is often studied and compared to that of centralised systems: Bilimoria [18] showed that a distributed resolution strategy can successfully solve complex multiple aircraft problems in real time; Durand [20] tested this with a no-speed variation scenario where only a centralised system was able to find a solution. Finally, the Free Flight concept [3,21,22] also illustrates that, when aircraft are fully responsible for their own separation from other traffic, they are free to decide upon their optimal route (`direct routing’), versus following the route received from a centralised point for safety. Studies for this project concluded that, once ADS-B technology is developed to a higher reliability and performance, a distributed conflict resolution system can safely guarantee airborne separation.
2.5. Method Categories
This review defines five main categories that can be used as a principal classification for almost all currently existing methods. Two main categories are identified within research for centralised approaches: The exact and heuristic categories. Regarding distributed approaches, we identify three main categories: Prescribed, reactive, and explicitly negotiated. These categories classify methods according to how avoidance manoeuvres/trajectories are identified in environments with multiple aircraft, where all involved aircraft are expected to perform conflict avoidance and modify their path in accordance.
In a centralised approach, a single agent is responsible for deciding the avoidance path of all involved aircraft, thus it is known how aircraft will move in the future. During optimization of an aircraft’s trajectory towards separation, it is assumed that intruders will follow the path set by this agent. The selection of trajectories/avoidance manoeuvres can be optimized towards a preference policy, a certain cost, or in other words to minimize a penalty function. The trajectory with the lower cost from a set of limited possibilities is picked. A preference can be made either for performance (e.g., lower fuel/energy consumption, flight path or time optimization) or safety. It may even be considered that crossing the protected zone of another aircraft, over a small period of time, is better than increasing flight path or adopting a significant change in speed. Methods may be classified on whether these are guaranteed to find the global optimum, i.e., exact algorithms, or heuristic algorithms which attempt to yield a good, but not necessarily global optimum solution. A Mixed Integer Linear Programming (MILP) approach is commonly used for finding the global optimum [23]. However, an exact algorithm needs a high computing time making it usually impractical for applications in real life [24]; thus heuristic algorithms, although not guaranteeing optimality, are often employed to shorten execution times. Commonly used heuristic approaches are Variable Neighborhood Search (VNS) [25], Ant Colony optimization [26], and Evolutionary Algorithms (EA) [27,28].
In both prescribed and reactive categories, coordination between aircraft is implicit. Traffic either reacts in accordance with a pre-defined set of rules (i.e., prescribed) or a common manoeuvre strategy in response to the conflict geometry (i.e., reactive). Prescribed is mainly achieved by application of the Right-of-Way (RoW) [29] rules. In short, these define that traffic from the left must give-way, overtaking aircraft manoeuvre to the right, and head-on conflicts are resolved with both aircraft turning to the right. However, Balasooriyan [30] demonstrated that applying these rules results in a higher number of losses of separation and conflicts than employing other rule sets where both aircraft are expected to initiate a trajectory change to avoid conflicts. When both aircraft adopt a deconflicting route, time in conflict decreases as both aircraft are moving away from each other. Reactive methods `react’ to the position of the intruders; avoidance manoeuvres are a direct result of the conflict geometry. A common example is to use the `shortest-way-out’ principle, which assures implicit coordination in one-to-one conflicts, as single conflicts are always geometrically symmetrical [22,31]. To be noted the latter and the RoW coordination define rules for conflict pairs. As the minimum separation distance represents the distance between two aircraft, multi-actor conflicts are simultaneous occurrences of two-aircraft conflicts. When implementing a coordination rule per pairwise conflict, it may be that given the geometry of the conflict, an aircraft receives contradicting solutions for solving its multiple pairwise conflicts. For example, when resolving pairwise conflicts sequentially, the avoidance manoeuvre to the closest conflict can aggravate the next pairwise conflict or even create secondary conflicts with other aircraft. Such prompts the study and verification of implicit rules among different multi-actor conflict geometries; research aims to resolve this issue by developing better ways of implicit coordination, combination of avoidance manoeuvres, and/or prioritization [32].
Resolution methods in the explicitly negotiated category resolve conflicts based on explicit communication between aircraft. There is no uncertainty regarding intruder movements as these are clearly defined in the shared information. This data sharing towards deconflicting can be done by setting a negotiation mechanism, where aircraft communicate towards an agreement [33], and/or prioritization in which a lower-priority aircraft follows an avoidance manoeuvre based on the communication from aircraft with more priority. There are advantages for both cases; a negotiation allows aircraft to share/act according to their preferred policy. The objective is for the final solution to be the best globally possible for all. However, in any negotiation there is the risk of a deadlock, where aircraft communicate indefinitely without reaching an agreement. Some sort of prioritization, respected by all involved aircraft, can limit the number of interactions. Priority can be based on factors such as aircraft current speed, proximity to destination, rules of the air (RoTA) [34], conflict geometry, or even type of operation. In any case, the rate of communication is a crucial factor. The communication frequency of the network is limited in bandwidth and aircraft may be unable to exchange data at a high frequency. Thus, the number of interactions in any case must be limited comparably to a real life scenario. The number of data transmissions necessary to reach an agreement, to establish a priority (when not implicit), or of sequential messages to the next aircraft in a priority sequence, must be optimized according to this limit. Additionally, a break condition must be added to the communication cycle to prevent aircraft from negotiating or waiting for data from other aircraft indefinitely.
Approximately one third of the researched CR methods does not follow either of the previously mentioned categories. For unmanned aviation, this is mainly in cases where only static obstacles are expected, and therefore, there is no uncertainty regarding future behaviour, or in cases when other aircraft do not have a conflict avoidance mechanism and their path is thus not expected to suffer alterations (e.g., Klaus [35], Teo [36]). For manned aviation, different approaches include mostly research works focused on airspace structure in order to guarantee minimum separation. Works such as Mao [37], Treleaven [38], and Christodoulou [39], resort to traffic flows which limit the movement of aircraft. These flows are separated by a safe margin and the lateral displacement when aircraft switch to a different flow is coordinated. Finally, other research, such as Bilimoria [18], Christodoulou [39], and Lupu [40], focus predominantly on the effects of different manoeuvres in similar conflict situations.
2.6. Multi-Actor Conflict Resolution
Centralised and distributed systems have different approaches to multi-actor conflicts. The former works towards a joint optimization of all involved trajectories, until a safe distance between all traffic is achieved. In such centralised systems, the number of conflicts and the degree of connection between trajectories will affect the speed with which the system will converge to its solution. It may also occur in complex situations that no solution is found. Centralised approaches may be divided into two main categories: Sequential algorithms which optimize trajectories one by one according to prioritization of aircraft [41], and concurrent resolution, where all trajectories are computed simultaneously [42]. The first of these two approaches is less computationally demanding; for each interaction, the system iterates over possible trajectories for a specific aircraft. Once a safe trajectory is found, it moves on to the next aircraft. When a safe trajectory is identified for each aircraft, a solution is found. This approach requires an adequate prioritization order, to be able to guarantee identification of safe trajectories for all involved aircraft [43,44]. Concurrent resolution methods do not require prioritization; however, application of such methods is often only possible on the assumption of limited uncertainty, which is required to reduce the complexity of the calculations. Durand [20] mentions, for example, an assumption of constant speeds and perfect trajectory prediction, or having the manoeuvres start at the same known optimization time step.
For distributed systems, avoidance manoeuvres adopt the point of view of each aircraft and local optimisation is the objective. At higher traffic densities, where conflicting aircraft pairs can no longer be considered as disconnected from other traffic, this local optimization does not guarantee a globally optimal solution, and there is a risk of unwanted emergent behaviour from interactions between multiple aircraft working individually. The resolution capacity of distributed systems is limited to the intruders the aircraft is capable of detecting. The solution to a subset of aircraft can unknowingly lead to future secondary conflicts with other aircraft, creating a chain reaction of conflicts, or in ultimate, very high traffic density cases, infinitely perpetuating chain conflicts, or Brownian motion [45,46]. How distributed methods deal with multi-actor conflicts is therefore a key characteristic of these methods. In this paper, we distinguish between three distributed approaches to multi-actor conflicts: Joint solution, pairwise sequential, and pairwise summed. In a joint solution, multiple intruders are considered simultaneously and a single solution is found that simultaneously resolves all conflicts that the ownship is involved in. In order to limit the complexity of a solution, CR models normally detect and resolve within a limited look-ahead time. Other distributed approaches generate pairwise resolutions, focusing only on individual conflict pairs. In pairwise sequential resolution, each manoeuvre resolves a conflict with one intruder, starting with the highest-priority conflict. Other methods, such as Hoekstra [21], sum the resolution vectors resulting from each pairwise resolution (i.e., pairwise summed). A single manoeuvre is then computed and performed resulting from this sum. The choice of whether to employ a pairwise or joint resolution also has consequences on the method’s ability for implicit coordination. As previously mentioned, for example, the `shortest-way-out’ principle in pairwise conflicts ensures implicit coordination. However, when summing or in a joint solution implicit coordination is not guaranteed. Nevertheless, as shown by Hoekstra [21], the summing of the avoidance vectors has a beneficial emergent, global effect of distributing the available airspace between the different vehicles.
2.7. Avoidance Planning
The planning of a manoeuvre can be defined as per the look-ahead time and the state of the aircraft after the avoidance manoeuvre is performed: Strategic is a long-range action which changes the flight-path significantly; tactical is a mid-range action that changes a small part of the flight path; escape is a short-term manoeuvre that brings the aircraft to safety with no additional consideration regarding the flight path. Figure 3 illustrates the differences.
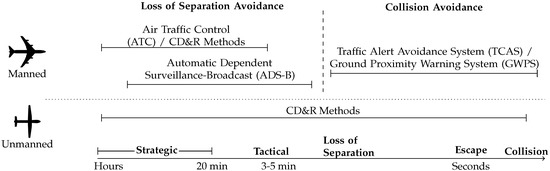
Figure 3.
Conflict detection and resolution methods for manned and unmanned aviation per look-ahead time.
A strategic manoeuvre (Figure 4a) is normally employed with more than 20 min to loss of separation (LoS), and may even extend to a pre-departure action. It affects the planned flight considerably, as future waypoints are modified to avoid conflict. In manned aviation, Air Traffic Control (ATC) is responsible for strategic and tactical avoidance planning. One of the ways to aid air traffic controllers would be to delegate part (or all) of the separation responsibility to the aircraft crew. In manned aircraft, this is made possible by resorting to on-board systems which receive broadcast information from nearby traffic; such system is called Automatic Dependent Surveillance-Broadcast (ADS-B). In comparison, unmanned aviation often employs (independent) sensors to detect other traffic. Given the physical limitations of such means of surveillance, these are tactical systems. A deviation manoeuvre is performed in order to avoid obstacles (Figure 4b). From all possible manoeuvres which prevent loss of separation, CR methods attempt to identify one which minimizes either distance from the desired path, flight time, or even fuel consumption or energy. The recovery to the initial flight plan is often not included in the tactical plan; normally aircraft will just redirect to the next waypoint after the conflict situation has been resolved.

Figure 4.
Different types of avoidance planning.
In manned aviation, CD&R methods are used for loss of separation avoidance. Escape manoeuvres are not usually employed. Given the large minimum separation distance employed in manned aviation, i.e., ICAO’s [47] definition of 5 NM horizontal separation and 1000 ft vertical separation, a loss of separation does not necessarily represent a collision (see Figure 5). In cases where a collision is emergent, Traffic alert and Collision Avoidance System (TCAS) and Ground Proximity Warning System (GPWS) are used instead of CD&R. For these systems, pairwise collision avoidance is the only objective. No similar mechanism is currently available for unmanned aviation, and therefore, CD&R must atone for this gap. Moreover, there’s no pre-defined standard separation distance, and considerably small values may be used (e.g., 50 m [48]). Thus, there is a higher chance that the drone is close to a collision once it has lost minimum separation. As a result, contrary to maned aviation, unmanned aviation research employs escape manoeuvres (Figure 4c). This, a last resource within seconds prior to collision, solely attempts to escape the obstacle with no additional considerations. Contrary to a tactical manoeuvre, typically no coordination or optimization is employed in these cases due to the lack of time for it.
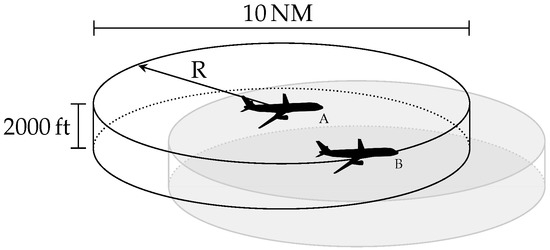
Figure 5.
The International Civil Aviation Organization’s (ICAO) self separation for manned aviation: horizontal separation and vertical separation.
2.8. Avoidance Manoeuvre
To avoid a future loss of minimum separation, several resolution manoeuvres can be used which will change the initially intended trajectory. These can be based on changing the current state: Heading variation (Figure 6a), aircraft change their current heading; speed variation (Figure 6b), which will change the position of the aircraft for a given point in time; vertical variation (Figure 6c), where aircraft increase or decrease altitude; or an aircraft may change its future intent by changing its flight-plan. One or multiple of these manoeuvres are performed as to follow a conflict free path. Most CR methods are set on decreasing the number of manoeuvres performed, resulting in a minimum deviation from the original path.

Figure 6.
Different types of avoidance manoeuvre.
Methods are often restricted to manoeuvres on the horizontal plane. Only a small percentage also consider vertical avoidance manoeuvres. There are advantages for both. Adding a degree of freedom allows for a variety of conflict avoidance movements. On the other hand, the extra degree of freedom results in a more complex optimal route calculation. This could be vital given that a solution must be found before loss of minimum separation. TCAS is singular in only applying vertical manoeuvres. For resolving short-term conflicts, climb/descend is a fast and efficient action since the required vertical separation is smaller than the horizontal one. Sunil [49] showed that for a stratified airspace, having only horizontal resolutions improves stability; less conflicts are considered and accounted for with only an horizontal conflict layer. Not including vertical changes is also acceptable from a performance point of view, as the latter is highly affected by the flight level the aircraft is operating in. Additionally, travelling at high altitudes is not the best scenario for speed manoeuvring: When the stall speed increases, the manoeuvring space decreases.
Initially, most CD&R methods used heading changes as preferred by air traffic controllers, as they often segment the airspace into layers. Lately, speed variation has received new attention with `subliminal’ speed control, which consists of modifying the aircraft speeds within a small range around their original speeds without informing air traffic controllers. As a result, some of the work of air traffic controllers can be automated thus reducing their workload. Research such as the ERASMUS project [50] and Chaloulos [51] show that, although for simple two-aircraft situations subliminal control can reduce the workload of air traffic controllers, its efficiency depends on the nominal minimal separation between the aircraft and on the time available to loss of separation. Conflict resolution based on speed change alone is naturally only possible with non-(near-)head-on conflicts. The likelihood of these kind of conflicts is dependent on the airspace structure and the heading difference between aircraft flying at similar flight levels. In other methods, such as Hoekstra [21], Rey [52], and Balasooriyan [30], combining heading and speed deviations showed potential results.
Flight plan modifications change the waypoints the aircraft is intended to follow. This is similar to real-life operations with flight paths being defined through successive waypoints. This way of avoiding conflicts has gained new attention with the development of the four-dimensional trajectory-based operation (4DTBO) concept [53]. This refers to 3D waypoints associated with timestamps defining when the aircraft is expected to reach each waypoint. With 4DTBO, the complete path and duration of the flight can be defined by specifying arrival times for a sequence of waypoints. Whenever it is detected that the initially defined 4D waypoints for all involved aircraft will result in one or more losses of minimum separation, new flight plans are constructed by either selecting different waypoints, different arrival timestamps, or both.
Performance limitations naturally have an impact on the manoeuvrability of aircraft. When defining a conflict avoidance, maximum turn rates, and maximum speed and accelerations ranges must be taken into account. Defining a heading and/or speed change which the aircraft cannot successfully complete, will jeopardize the success of the manoeuvre on achieving minimum separation from other traffic. Moreover, different look-ahead requirements may be considered based on speed ranges. For unmanned aviation, taking into account performance differences is an especially important factor given the large range of possible missions which can involve many different types of UAVs (e.g., rotorcraft, fixed-wing). To prevent the calculation of avoidance manoeuvres outside performance limits, methods, such as Van Dam [31], define a solution space bounded by the possible range of speeds; it is not possible to define an avoidance manoeuvre outside of these boundaries. Still, the speed range is often defined per aircraft type without taking the environment into account. As mentioned before, the manoeuvring space is dependent on the altitude of the aircraft. Studies such as Lambregts [54], attempt to develop a conflict resolution method with an envelope protection functionality which can identify the maximum manoeuvring space in order to take advantage of the full performance capabilities of the UAV.
Finally, avoidance manoeuvres may also be distinguished on whether they are discrete or continuous; on whether an avoidance is calculated given a discrete state and assumes no modification of this state until the manoeuvre is terminated, or if the environment is observed periodically during the manoeuvre which is adapted incrementally in response. In theory, most avoidance algorithms have a discrete implementation, since they calculate resolution manoeuvres that should resolve the conflict without further intervention. However, in practice, these algorithms can still be used to reevaluate conflicts at each update cycle of the implementation. In this case, in each update cycle where the ownship is detected to be in conflict, the conflict avoidance algorithm outputs an avoidance manoeuvre given the current state of the environment. As a result, the ownship may change a previously-defined avoidance manoeuvre at any update step, based on the changed nature of the traffic situation.
2.9. Obstacle Types
A CD&R method may prevent collision only with static obstacles, with dynamic obstacles, or with all (i.e., both static and dynamic obstacles). When a model avoids solely static objects, it may be inferred that it has strategic planning, with the trajectory being set before the beginning of the flight in a known environment.
Manned aviation CD&R models will naturally be directed at detecting other dynamic traffic as these models are mostly used when aircraft are flying at cruise altitude. It should be noted that it is not guaranteed that a model directed at dynamic obstacles can also avoid static obstacles. First, while most of these CD&R models assume obstacles as a circle with radius equal to the minimum separation distance, a static object can have different sizes. Second, most models also assume some sort of coordination and non-zero speed. Most dynamic obstacle oriented CD&R models would have to be enhanced when transposed to, for example, an urban environment where deviation also from static objects, such as buildings, must be guaranteed.
For unmanned aviation, a considerable number of CD&R models still focus solely on static obstacles. However, these can only be used for operations where the environment is well known in advance. This is the case of, for example, an area where a drone must carry an object from a start to an end point, and no other traffic is expected.
2.10. Optimization
For CD&R methods, safety is paramount; however, there is a preference for methods which do not significantly alter the initially planned trajectory or heavily increase the costs of an operation. The efficiency of a CR method can be evaluated regarding its effect on the time and/or path of the flight or even fuel/energy consumption. To be noted that a CR method may contain weights of costs which vary based on the mission/situation, thus its efficiency being dependent not only on the intrinsic method but on the weights employed.
A simple way to minimise path length is to be partial to small heading changes when avoiding obstacles [37]. Minimizing flight time can be a direct consequence of minimizing flight path when the speed is assumed constant. In other cases, minimizing flight time results in a preference for avoidance manoeuvres which do not include lowering the aircraft’s speed.
Computing fuel expenditure is not direct, as it depends on several physical factors of the aircraft such as model, speed, and weight at the moment of the operation. A simplification is to opt for the manoeuvre which minimizes speed variation [23] as the latter is a major coefficient on fuel waste. From the examined research, the Base of Aircraft Data (BADA) performance model [55] is preferred for fuel consumption calculations [52]. For unmanned aviation, energy efficiency based CD&R is currently being research as more drones are developed and more information on theses systems is made available. Research, such as Dietrich [56] and Stolaroff [57], offer a first look at estimating drones’ energy consumption.
2.11. Reviewed CD&R Models
The reviewed manned and unmanned CR methods are presented in Table 3 and Table 4, respectively. Table 5 serves as indication for the abbreviations used for each category.
Table 3.
Conflict detection and resolution methods for manned aviation. Table 5 defines the used abbreviations.
Table 4.
Conflict detection and resolution methods for unmanned aviation. Table 5 defines the used abbreviations.
3. Experiment: Direct Comparison of CR Methods
This section describes the design of the fast-time simulation experiments conducted in order to compare four conflict resolution methods in term of safety and efficiency. The implementation code can be accessed online at [130]; scenarios and result files are available at [131].
3.1. Apparatus and Aircraft Models
The evaluation is performed using the open-source Air Traffic Simulator BlueSky [11]. This section gives a description of the most relevant aspects of this simulator, and of the scenarios that are used to compare concepts. The exact implementation of the simulator set-up, the scenarios, and the resolution algorithms is available on-line [130,131]. The BlueSky simulator tool can be used to easily implement and evaluate different CD&R methods, allowing for all CD&R to be tested under the same scenarios and conditions. Simulation scenarios are based on the work of Sunil [132]. These scenarios were chosen as they represent a homogeneous traffic picture, uniform in terms of altitude, spatial, and speed distribution. The results thus reflect the ideal behaviour of the CR method, and not its response to agglomerates of aircraft which are unaccounted for.
Bluesky uses a kinematic aircraft performance model based entirely on open data [133]. Different aircraft types can be introduced into the Bluesky simulation when performance limits are known. The aircraft in the simulation are all Boeing 747-400’s and DJI Mavic Pro quadcopters, for manned and unmanned aviation, respectively. These aircraft types were selected for their significant speed range. This way, limitations of the aircraft flight envelope affect the resolution choices as little as possible. The characteristics of these aircraft are presented in Table 6. The data for the B747-400 aircraft comes from BADA [55]. For the DJI Mavic Pro model, speed and mass were retrieved from the manufacturers data. While exact turn rate and acceleration/braking values are not available, generic values were assumed.
Table 6.
Performance data for Boeing 747-400 and DJI Mavic Pro used with BlueSky simulations.
As previously mentioned, performance limitations have an impact on the manoeuvrability of the ownship aircraft, which in turn limits the range of actions that can be performed to avoid a conflict. For unmanned aviation, this work employs the DJI Mavic Pro, a well-known model used in a wide range of applications [134,135,136]. However, a mission employing an UAS model with significant differences in performance (e.g., a fixed-wing model), should not directly extrapolate from the results herein obtained.
3.2. Independent Variables
Two independent variable are considered in this experiment: Traffic density, and conflict resolution methods.
3.2.1. Traffic Density
The experimental scenarios herein used build up traffic volume from zero to a desired value, after which traffic density is maintained at this desired value. The traffic density varies from low to high as per Table 7. The instantaneous aircraft value defines the number of aircraft expected at any given moment during the measurement period. Given the duration of the measurement and the average flight time, the simulator constantly spawns (adds to the simulation) aircraft at the same rate these are removed from simulation, in order to keep a constant traffic density. Density values were defined based on current expectations. In 2017, the Netherlands had a maximum traffic density of 32 aircraft per 10,000 NM2 in the upper airspace [132]. Given traffic increase expectations [137], Netherlands may then expect up to 45 aircraft per 10,000 NM2 by 2025. Unmanned aircraft are considered for a hypothetical situation where drones are used for light-weight parcel deliveries. For the urban area of Paris, this would represent over 1 million drones per 10,000 NM2 by 2035 [19]. To keep computation times reasonable, lower densities were selected.
Table 7.
Traffic volumes used in simulation.
3.2.2. Conflict Resolution Methods
Four commonly used conflict resolution methods were chosen for direct comparison. The following section gives a description of these methods, their assumptions, and compares them in terms of planning, control, coordination, and multi-actor conflict resolution. The exact implementation of these methods, and the rest of the simulation set-up is available on-line [130,131].
Reactive: In this category, coordination is implicit and adopted by all aircraft; no negotiation is necessary. Here, we explore two different methods that use implicit coordination by adopting the ’shortest-way-out’ principle. The minimum heading/speed displacement which moves the CPA between two conflicting aircraft to the edge of the intruder’s PZ is calculated using the velocity obstacles (VO) theory. A VO is defined as the set of all velocity vectors of a moving agent which will result in a loss of separation with a (moving) obstacle at some future point in time [138,139]. Figure 7a illustrates a traffic situation in which the ownship aircraft is in conflict with an intruder. As a first step, the collision cone (CC) is defined by lines from the ownship to the intruder, tangential to both sides of the intruder’s protected zone. The ownship and intruder are in conflict when the relative velocity is inside the CC. By translating the CC with the intruder’s velocity, the VO in Figure 7b is obtained. This VO represents the set of ownship velocities that will result in a loss of separation with the intruder.
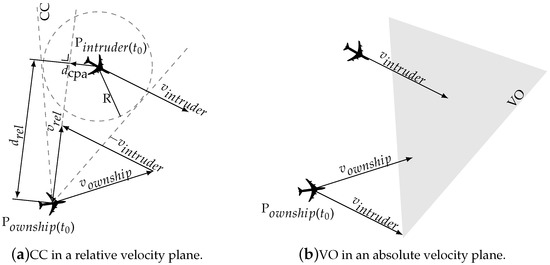
Figure 7.
Cone of collision (CC) and a velocity obstacle (VO) in a situation of a future loss of separation. R represents the radius of the protected zone. and denote the ownship’s and the intruder’s initial position, respectively. is the observed aircraft velocity vector, is the intruder velocity vector, and is the relative velocity vector. is the relative distance vector, and indicates the distance at the closest point of approach.
The two reactive methods differ in how they deal with multi-actor conflicts, and will allow for a comparison between pairwise and joint resolution:
- (a)
- Potential Field [21,140]: In this approach, predicted conflicting aircraft positions are represented by `charged particles’ which simultaneously push and are pushed away from the conflicting aircraft. In the evaluation in this paper, this category of CR methods will be represented by a `bare’ version of the Modified Voltage Potential (MVP) method [21], for which the geometric resolution is displayed in Figure 8. For conflicting aircraft, the predicted positions at the closest point of approach (CPA) ‘repel’ each other. This ‘repelling force’ is converted to a displacement of the predicted position at CPA, in a way that the minimum distance will be equal to the required minimum separation between aircraft. Such displacement results in a new advised heading and speed, in the direction that increases the predicted CPA. Choosing this direction for each resolution ensures that the MVP is implicitly coordinated for 2-aircraft conflicts; both aircraft in a conflict will take complimentary measures to evade the other. In case of multi-aircraft conflicts, resolution vectors are summed for each conflict pair.
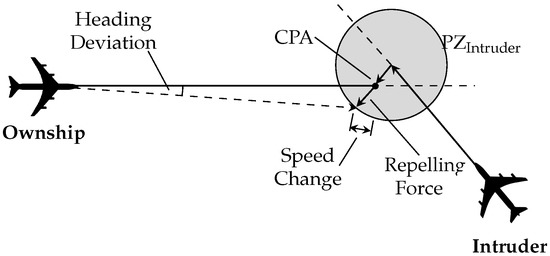 Figure 8. Modified Voltage Potential (MVP) resolution. Adapted from Hoekstra [21].This method has the advantage of simplicity; the resulting calculations are computationally light, and the geometric representation allows other possible constraints to be taken into account easily. On the other hand, because resolutions are solely based on the conflict geometry, they may oppose the desired flight direction as proposed by the flight plan.
Figure 8. Modified Voltage Potential (MVP) resolution. Adapted from Hoekstra [21].This method has the advantage of simplicity; the resulting calculations are computationally light, and the geometric representation allows other possible constraints to be taken into account easily. On the other hand, because resolutions are solely based on the conflict geometry, they may oppose the desired flight direction as proposed by the flight plan. - (b)
- Solution Space [31,114]: The VO theory is used in combination with kinematic constraints to determine a set of reachable, conflict-free velocity vectors, and a set of reachable, conflicting velocity vectors. These two sets of velocities together form the solution space. Figure 9 shows this velocity space for aircraft: Two concentric circles, representing the minimum and maximum velocities of an aircraft, bound all reachable combinations of heading and speed. Within this reachable velocity space, VOs are constructed for each proximate aircraft, each representing the set of reachable heading/velocity combinations that would result in a conflict with the respective aircraft. When all relevant VOs are subtracted from the set of reachable velocities, what remains is the set of reachable, conflict-free heading/speed combinations. Solution space CR methods determine resolution manoeuvres by selecting heading/speed combinations from this set of conflict-free, reachable velocities. As a result, these methods provide resolutions that are able to solve multiple conflicts simultaneously. In two-aircraft situations, these methods behave similarly to potential field VO methods. In multi-aircraft situations they act as described above. Implicit coordination is also an issue for these methods in multi-aircraft conflicts, and additional coordination rules are required in these situations [30].
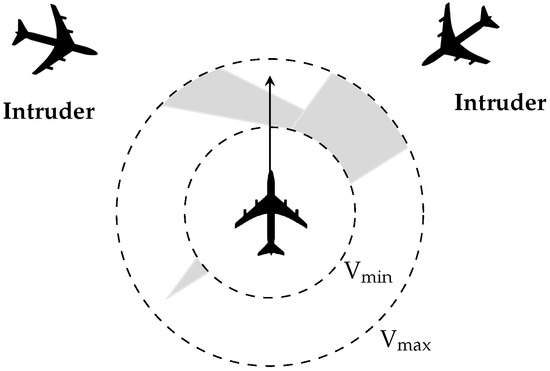 Figure 9. Solution space diagram (SSD) resolution. Adapted from Van Dam [31].The CR algorithm herein used is the Solution Space Diagram (SSD) method as implemented by Balasooriyan [30]. For computation of this model, the VOs and the circles delimiting velocity performance are inserted into an existing polygon clipper library [141], which is responsible for finding the set of spaces within the velocity limits that do not intersect the VOs. From this set of spaces, the `shortest-way-out` manoeuvre (i.e., shortest speed/heading deviation) is picked.
Figure 9. Solution space diagram (SSD) resolution. Adapted from Van Dam [31].The CR algorithm herein used is the Solution Space Diagram (SSD) method as implemented by Balasooriyan [30]. For computation of this model, the VOs and the circles delimiting velocity performance are inserted into an existing polygon clipper library [141], which is responsible for finding the set of spaces within the velocity limits that do not intersect the VOs. From this set of spaces, the `shortest-way-out` manoeuvre (i.e., shortest speed/heading deviation) is picked. - (c)
- Explicit coordination: This coordination works on the base that aircraft communicate their intention and thus there is no uncertainty regarding their future movement. Here, we use a negotiation approach where each aircraft sends its deconflicting policy to intruders until all broadcast policies result in a global solution. We assume a communication cycle similar to Yang [33], displayed in Figure 10. This was used due to its satisfactory performance in dealing with complex conflict scenarios as demonstrated by the authors.
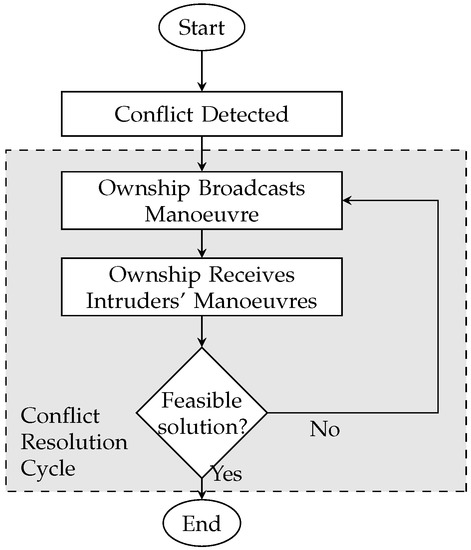 Figure 10. Iterations of an explicitly negotiated solution. Adapted from Yang [33].Two aircraft share information when they are in a pairwise conflict; `neighbours’ is the set of intruders the ownship is in conflict with. Aircraft work on the assumption that each aircraft primarily acts towards avoiding losses of minimum separation. First, each aircraft finds a set of conflict-free avoidance manoeuvres. It must also be guaranteed that the manoeuvres within this set will not create new conflicts with other nearby aircraft. This set of solutions is found by identifying the safe interval between heading/speed displacements that cross the edge of intruders’ protected zone. Within this set, a preference for a more significant heading or speed change is based on the aircraft’s own policy; the ultimate goal is to achieve an optimal solution for all aircraft. Each aircraft then identifies the preferred avoidance manoeuvre and broadcasts it to the local neighbours.Once an aircraft receives the neighbours’ manoeuvres, it will verify whether all conflicts are resolved. If so, communication is terminated and the aircraft adopts the previously computed avoidance manoeuvre. Otherwise, aircraft use the received intent information from the neighbours to update the set of conflict-free solutions. A new avoidance manoeuvre is picked from this set; however, now preference is for a manoeuvre within the smallest variation from the previously broadcast manoeuvre in an attempt to converge faster to a solution.In a real-world situation, the time delay between generation and reception of a message is crucial. Studies, such as Yang [33], focus on optimizing the convergence to an agreement and demonstrating that a reduced number of negotiation cycles is required to achieve a robust solution. Our objective, however, is to see how the method behaves within this limited number of negotiation iterations. Yang [33] obtained an average number of iterations below five, albeit for smaller traffic densities. We chose to use this value to limit computational effort. However, it should be noted that a higher limit could favor more robust avoidance manoeuvres.
Figure 10. Iterations of an explicitly negotiated solution. Adapted from Yang [33].Two aircraft share information when they are in a pairwise conflict; `neighbours’ is the set of intruders the ownship is in conflict with. Aircraft work on the assumption that each aircraft primarily acts towards avoiding losses of minimum separation. First, each aircraft finds a set of conflict-free avoidance manoeuvres. It must also be guaranteed that the manoeuvres within this set will not create new conflicts with other nearby aircraft. This set of solutions is found by identifying the safe interval between heading/speed displacements that cross the edge of intruders’ protected zone. Within this set, a preference for a more significant heading or speed change is based on the aircraft’s own policy; the ultimate goal is to achieve an optimal solution for all aircraft. Each aircraft then identifies the preferred avoidance manoeuvre and broadcasts it to the local neighbours.Once an aircraft receives the neighbours’ manoeuvres, it will verify whether all conflicts are resolved. If so, communication is terminated and the aircraft adopts the previously computed avoidance manoeuvre. Otherwise, aircraft use the received intent information from the neighbours to update the set of conflict-free solutions. A new avoidance manoeuvre is picked from this set; however, now preference is for a manoeuvre within the smallest variation from the previously broadcast manoeuvre in an attempt to converge faster to a solution.In a real-world situation, the time delay between generation and reception of a message is crucial. Studies, such as Yang [33], focus on optimizing the convergence to an agreement and demonstrating that a reduced number of negotiation cycles is required to achieve a robust solution. Our objective, however, is to see how the method behaves within this limited number of negotiation iterations. Yang [33] obtained an average number of iterations below five, albeit for smaller traffic densities. We chose to use this value to limit computational effort. However, it should be noted that a higher limit could favor more robust avoidance manoeuvres. - (d)
- Sequential cost: In which a single agent is responsible for redirecting aircraft. It it assumed that aircraft will follow the guidelines set by this agent and thus uncertainty is reduced. At each update step, if conflicts are found, conflicting aircraft are redirected towards preventing loss of separation. We follow a sequential approach, setting an order based on the time to loss of separation. Note that the aircraft order can be defined over multi-criteria and will have an impact on the final trajectories. With each aircraft, the possible paths are considered; these are a discrete set of possible heading/speed changes restricted by the aircraft’s performance range.The cost for each trajectory is calculated and the path with the lowest cost is chosen. The cost definition used in the simulations herein performed is similar to Hao’s [74]:where represents the variation of the total length of the path, the change in velocity, and D the distance to intruders. Lastly, a penalty value P is used to add an extra cost to trajectories which cross an intruder’s PZ, as to make these more expensive and, therefore, less desirable. The weight coefficients, , , and indicate the weights given to the path length variation, to the change in velocity, and to the distance to intruders, respectively. The value of the weight coefficients denotes their importance. If, for example, a lower fuel consumption is favoured over distance to threats, then and should be given higher values, as to make an increment in flight path or speed variation significantly expensive. When summed, the weight coefficients are equal to one. Note that other properties could be added to the cost equation according to preference.The chosen weights naturally have an influence on the overall results. When prioritization is set over efficiency, it might have a negative effect on safety and vice-versa. In our work, we chose to emphasize lower fuel consumption, focusing on smaller nominal trajectory deviations. A penalty value for losses of separation is used, proportionally to its severity. The same weights were used both for manned and unmanned aviation, with the purpose of observing possible differences in performance.
Table 8 describes the main differences between the four CR methods that are considered in this comparison. All act on a tactical timescale, and all but the cost method, have distributed control. While the coord method focuses on explicit intent communication with other aircraft, in MVP and SSD each aircraft chooses its conflict resolution without negotiation. Instead, implicit coordination is introduced in pairwise conflicts through the use of the `shortest-way-out’ resolution strategy. MVP resolves pairwise conflicts, summing resolution vectors in case of multi-aircraft conflicts, whereas SSD decides upon a joint resolution manoeuvre which resolves conflict with all aircraft simultaneously.
Table 8.
Properties of the CR methods used in simulation.
All four CR methods can perform the same type of manoeuvre: Heading and/or speed change. There is no limitation on the number of turns; every aircraft is free to perform the desired avoidance manoeuvre. The conflict evaluation interval is of one second; each second, the current conflicts and LoSs are detected and the CR method is computed if necessary. An aircraft adopts the avoidance manoeuvre output by the CR method, until it is past CPA. At this point, it will redirect itself to the next waypoint. No wind or performance uncertainties were considered.
4. Experimental Design and Procedure
4.1. Minimum Separation
The value of the minimum safe separation may depend on the density of air traffic and the region of the airspace. However, for manned aviation most CD&R studies use ICAO’s [47] definition of 5 NM horizontal separation and 1000 ft vertical separation. For unmanned aviation, there are no established separation distance standards yet, although 50 m for horizontal separation is a value commonly used in research [48] and will therefore be used in the experiments herein performed. For vertical separation, 65 ft was assumed.
4.2. Conflict Detection
The experiment will employ state-based conflict detection for all conditions. This assumes linear propagation of the current state of all involved aircraft. Using this approach, the time to CPA (in seconds) is calculated as:
where is the cartesian distance vector between the involved aircraft (in meters), and the vector difference between the velocity vectors of the involved aircraft (in meters per second). The distance between aircraft at CPA (in meters) is calculated as:
When the separation distance is calculated to be smaller than the specified minimal horizontal spacing, a time interval can be calculated in which separation will be lost if no action is taken:
These equations will be used to detect conflicts, which are said to occur when , and , where is the radius of the protected zone, or the minimum horizontal separation, and is the specified look-ahead time. A look-ahead time of five minutes is used for conflict detection for both manned and unmanned aviation. Note that the look-ahead distance will be bigger for manned aviation, as manned aircraft will cross a longer path in the five minutes.
This analytical calculation of the time to loss of separation herein performed has the advantage of not requiring pre-defined nodes. It should be noted that some conflict detection models, especially when using a flight plan or intent information, opt for calculating distance at CPA through the discretisation of a 4D path, where spatial nodes represent all the possible states within the simulation space. Conflict detection is then based on checking if any aircraft occupy nodes closer than the minimum separation distance at any point in time.
4.3. Simulation Scenarios
We first define the measurement area: This is a square area with its dimensions determined by the average True Air Speed (TAS) and average flight time. The aircraft spawn locations (origins) and destinations are placed in alternating order on the edge of this area, with a spacing equal to the minimum separation distance plus a 10% margin, to avoid conflicts between spawn aircraft and aircraft arriving at their destination. Additionally, to prevent very short-term conflicts between just spawned aircraft and pre-existing cruising traffic, aircraft are spawned at a lower altitude, after which they climb to a common cruise level. Unmanned aircraft are expected to climb almost vertically. Aircraft fly a straight line towards their destination, with a constant heading computed with a normal distribution random number generator, varying between and . This straight line is formed by several waypoints within the measurement area. These waypoints prevent the aircraft from leaving the measurement area in an attempt to avoid conflicts. Logging is restricted to the cruise phase of the flight. The cruise flight level is the same for all aircraft. The total planned flight distance is uniformly distributed between a pre-defined minimum and maximum value based on a minimum flight time and the average TAS. TAS values vary between and , as specified by the respective aircraft model. Note that no wind was considered.
Ideally, aircraft would only operate within the measurement area, thereby ensuring a constant density of aircraft within that area. However, aircraft may temporarily leave the measurement area during the resolution of a conflict and should not be deleted in this case. Therefore, a second, larger area encompassing the measurement area is considered: The experiment area. As a result, aircraft in a conflict situation close to their origin or destination are not deleted incorrectly from the simulation. Ultimately, an aircraft is deleted once it leaves the experiment area or gets close to the ground for landing. Note that we assume a no-boundary setting, with sufficient flight space around the measurement area, in order to avoid edge effects from influencing the results.
Each scenario consists of a build-up period to reach a steady state in terms of traffic volume and traffic pattern. The build-up is followed by the logging phase, during which traffic volume is held constant, and a build-down period, allowing for aircraft created during the logging period to finish their flights. The experiment is repeated multiple times with different origin-destination combinations. More details are displayed in Table 9.
Table 9.
Properties of the manned and unmanned aviation scenarios used in simulation.
4.4. Dependent Measures
Three different categories of measures are used to compare the simulated conflict resolution methods: Safety, stability, and efficiency.
4.4.1. Safety Analysis
Safety is defined in terms of the number and duration of conflicts and losses of separation, where fewer conflicts and losses of separation are considered to be safer. Additionally, losses of separation are distinguished based on their severity according to how close aircraft get to each other:
A low separation severity is preferred.
4.4.2. Stability Analysis
Stability refers to the tendency for tactical conflict avoidance manoeuvres to create secondary conflicts. Deviating from the nominal path, in order to avoid conflicts, often results in a longer flight path. At high traffic densities, conflict free airspace is scarce, and when each aircraft requires a bigger portion of the airspace it often results in more conflicts. Therefore, tactical avoidance manoeuvres tend to create conflict chain reactions. In literature, this effect has been measured using the Domino Effect Parameter (DEP) [142]. The latter can be calculated as follows:
where and represent the number of conflicts with CD&R ON and OFF, respectively. A higher DEP value indicates a more destabilizing method, which creates more conflict chain reactions.
4.4.3. Efficiency Analysis
Efficiency is evaluated in terms of distance travelled and duration of flight. Here, the added flight distance and time are compared to the baseline case where no conflict resolution is performed, and aircraft follow their straight trajectories from origin to destination. A CR method which results in considerable path deviations, significantly increasing the path travelled and/or the duration of the flight is considered inefficient. Additionally, for manned aviation, the work done (W) associated with fuel consumption can be calculated by:
where and represent the thrust vector and the displacement vector along the path, respectively. For unmanned aviation, we are not able to calculate the work done as we do not, currently, have a drag model for drone vehicles.
5. Experimental Hypotheses
It was naturally hypothesized that as the traffic density increases, all safety, efficiency, and stability parameters worsen. More LoSs, more conflicts and more conflict chain reactions are expected. However, it was hypothesised that increasing traffic density would specially impact the performance of the SSD and coord methods. As more intruding aircraft are taken into consideration, it may be that these methods are not able to find a solution. In the SSD, if the VOs of all intruders occupy the complete solution space, no solution will be identified. In the coord method, more aircraft likely results in more iterations before a consensus is found. If the number of interactions surpasses the maximum number of iterations imposed, it will mean that aircraft do not reach a global solution.
Regarding safety, it was hypothesized that methods MVP and SSD would have fewer LoSs and fewer conflicts. The `shortest way out’ resolution strategy guarantees implicit coordination in pairwise conflicts, and minimal path deviations which help limit conflict chain reactions. While in multi-actor conflicts this implicit coordination is no longer guaranteed, good results in previous research which used these methods [30,143] indicate that this resolution strategy is still effective in multi-actor conflicts. In comparison, the coord method guarantees coordination in all cases. However, as each aircraft follows their own policy, it cannot be guaranteed that the avoidance manoeuvres taken by all aircraft are optimal in terms of limiting the portion of airspace used. Finally, in the cost model, as LoSs with a low intrusion severity may be accepted in favour of not increasing flight path/time, it was hypothesized that it would have more LoSs than the other methods. Additionally, as a limited number of possible heading/speed manoeuvres are considered, it may be that an optimal manoeuvre for every conflict situation does not exist within the possible manoeuvres.
It was hypothesized that the cost method would have better efficiency, as its objective is to maximize the global efficiency. MVP and SSD methods also are expected to be efficient, as the avoidance heading/speed employed represent the minimum deviation required to avoid LoS. When using the coord method, each aircraft tries to implement their optimal policy, which can be to either minimize flight path or flight time deviation. As a result, this method is not hypothesized to have the best flight distance of flight time efficiency, as not all aircraft work towards the same objective. For manned aviation, the MVP and SSD methods which reduce the deviation from the nominal path, reducing the negative impact on flight distance, are expected to do less work.
Finally, stability wise, a higher DEP is expected for the coord and cost methods in comparison with MVP and SSD. The latter guarantee pairwise coordination based on the `shortest way out’ resolution strategy which is expected to benefit lower airspace area usage, reducing the amount of conflict chain reactions.
6. Experimental Results
The effect of the independent variables on the dependent measures is presented, in order to assess the effect of each conflict resolution method. Box-and-whisker plots are used to visualize the sample distribution over the several simulation repetitions. Efficiency, stability, and time in conflict values present outliers; the number of outliers (<10% of the total data) is consistent throughout. As these do not contribute to the comparison between CR methods, we decided not to display them for clarity.
6.1. Safety Analysis
Figure 11 displays the mean total number of pairwise conflicts. A pairwise conflict is only counted once independently of its duration. The results for both manned and unmanned aviation are comparable for each of the CR methods. The increase in number of conflicts, compared to the situation with CR OFF, is due to secondary conflicts created by the tactical resolution manoeuvres. The number increases with the traffic density; with more aircraft it is progressively more difficult to avoid LoSs without triggering secondary conflicts. On average, as hypothesized, methods MVP and SSD display fewer secondary conflicts for both manned and unmanned aviation. These methods use the `shortest way out’ resolution strategy, limiting the space used by each aircraft, which limits conflict chain reactions. Within the two methods, the MVP method has more secondary conflicts than the SSD method, indicating that a joint resolution to multi-actor conflicts is more efficient than pairwise resolution in limiting the number of secondary conflicts. Pairwise consideration of conflicts neglects constraints imposed by nearby aircraft not currently involved in the conflict. As a result, the chance of secondary conflicts is not considered in the calculation of a pairwise resolution. Additionally, contrary to hypothesized, the cost model presents fewer conflicts than the coord method, although the difference between these two methods is negligible when compared with the difference between them and MVP and SSD.
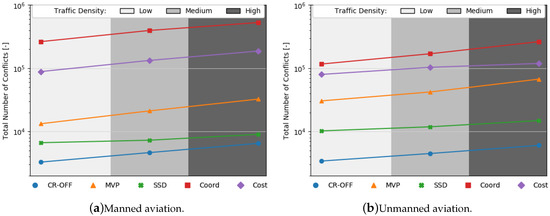
Figure 11.
Total number of conflicts per CD&R method.
Figure 12 shows the amount of time spent in ‘conflict mode’ per aircraft. An aircraft enters ‘conflict mode’ when it adopts a new state computed by the CR method. The aircraft will exit this mode, once it is detected that it is past the previously calculated time to CPA (and no other conflict is expected between now and the look-ahead time). At this point, the aircraft will redirect its course to the next waypoint. The time to recovery is not included in total time in conflict. Based on this information and Figure 11, the number of conflicts is not directly correlated with the amount of time in conflict. For example, although the MVP method has a higher number of conflicts than SSD, it has a lower time in conflict. Time in conflicts for methods MVP, SSD, and cost are comparable. Method coord has the highest time in conflict, as well as a more pronounced tendency for the total time in conflict to increase with the traffic density. As the traffic density increases, there are potentially more situations where the break condition terminates the negotiation cycle before a global solution is found. A non-global solution will result in not all conflicts being resolved immediately, which in turn results in longer conflicts. Additionally, given that the coord method also has the highest number of conflicts (Figure 11), we can deduce that it has the highest tendency to create chain conflict reactions.
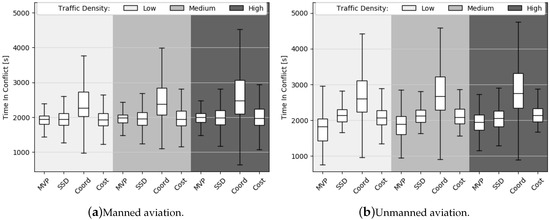
Figure 12.
Time in conflict per flight and per CD&R method.
Figure 13 shows the mean total number of LoSs for each of the conditions. It can be seen that all methods significantly reduce the number of losses of separation, compared to the baseline condition where CR is OFF. MVP has the lowest number of LoSs on all examined traffic densities for both manned and unmanned aviation. Interestingly, a high number of conflicts (Figure 11) or time in conflict (Figure 12) does not directly result in a high number of LoSs. For example, the coord method has a high number of conflicts and time in conflict but few losses of separation. It should thus be considered that a high number of conflicts does not always have a negative impact on intrusions. In fact, Hoekstra [144] argues that a moderately positive number of secondary conflicts can be beneficial on a global scale; the effect of sequentially running into a new conflict creates a wave-like pattern, spreading the aircraft out in the available airspace thus `creating’ more airspace.
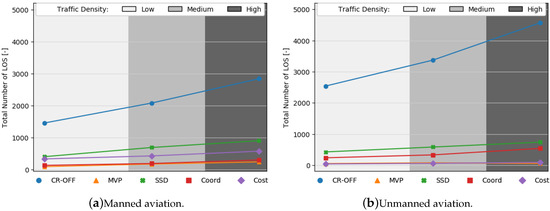
Figure 13.
Total number of losses of separation per CD&R method.
It was hypothesized that MVP and SSD methods woulds have the lower number of LoS. However, this is only true for MVP, which performs pairwise resolution; the SSD method, which performs joint resolution has the highest number of LoSs of all tested CR methods. This is likely due to the fact that, as the traffic density increases, there are more situations when the solution space has no possible solution and thus, no manoeuvre is taken to avoid conflict situations. Additionally, it was hypothesized that the cost method would have a higher number of LoSs as low severity intrusions would be preferred over a significant deviation from either the nominal heading or nominal path. However, this is only true for manned aviation, whereas for unmanned aviation, the method has the lowest number of LoSs, alongside the MVP method. The cost calculation used displays a much better performance in the unmanned environment, proving that weights coefficients should be catered and tested for the intended operational environment. Analogously, the coord method is better at reducing the number of LoSs in an manned environment than in an unmanned environment. In conclusion, when weights or policies are put in place, these should be aligned with the environment these are to be applied to.
Figure 14 displays the intrusion severity for the losses of separation that occurred for each CR method. It can be seen that, although the overlap between conditions is large, MVP is most effective at minimising the intrusion when a loss of separation occurs. No direct correlation between intrusion severity and the traffic density was observed for any of the methods.
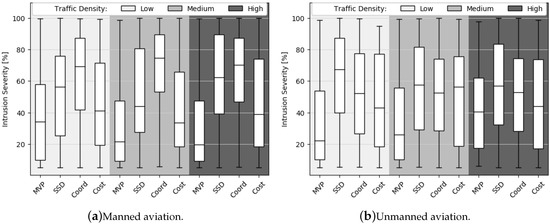
Figure 14.
Intrusion severity rate per loss of separation and per CD&R method.
6.2. Stability Analysis
Figure 15 displays the mean DEP value for each CR method. A high positive value indicates the occurrence of conflict chain reactions causing airspace instability. The coord method is the most unstable of all the CR methods, signifying that an avoidance manoeuvre with this method is likely to trigger secondary conflicts. As seen in Figure 12, this model also has the highest time in conflict, resulting from longer negotiations or from negotiations cycle terminating without a global solution. When the start of an avoidance manoeuvre is delayed, this alone can also lead to encountering more conflicts. As hypothesized, MVP and SSD have the lowest DEP values. A ‘shortest way out’ resolution strategy benefits lower airspace area usage which reduces the amount of conflict chain reactions.
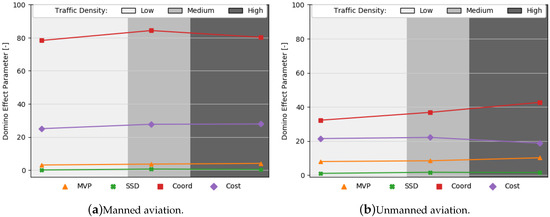
Figure 15.
Domino effect parameter (DEP) per CD&R method.
6.3. Efficiency Analysis
According to Figure 16, the MVP method results in the smallest path distance deviation. In other methods, either because aircraft perform longer deconflicting manoeuvres, or because they encounter more conflict situations which require a deviation from the nominal path, these travel for longer before reaching their destination. When assuming constant speed, increasing the flight path results in a longer flight. However, as seen in Figure 17, for manned aviation the SSD method has superior flight time compared with the coord method which has a larger flight distance variation. This indicates that the SSD method is favouring decreasing the speed of the aircraft as a deconflicting manoeuvre. MVP also has the smallest time deviation. It was hypothesized that the cost method would have better efficiency; however, overall, MVP and SSD methods proved more efficient. Having minimal path deviations for CR, reduced the effect of resolution manoeuvres on flight efficiency. The cost method has considerably better efficiency in the unmanned simulations versus the manned simulations, showing how cost calculations must be adjusted towards the characteristics of the environment. Finally, the coord method was significantly more efficient for manned aviation than for unmanned aviation, showing that the behaviour of specific policies is also highly dependent on the environment.
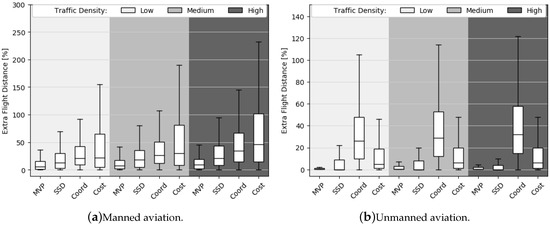
Figure 16.
Extra flight distance per flight and per CD&R method.
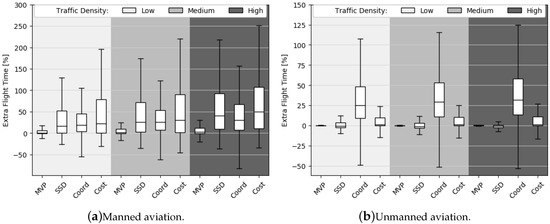
Figure 17.
Extra flight time per flight and per CD&R method.
Figure 18 identifies the extra work done per flight performed by manned aviation. These values are directly comparable with the extra flight distance (Figure 16). The increase in work performed is a direct consequence of increasing the flight path due to conflict resolution manoeuvres. The MVP method has the smallest path deviation and, therefore, the smallest work increase. Note that the total work presented should not be used as exact absolute values as it is a generic relative indicator for fuel, which may be used for comparison.
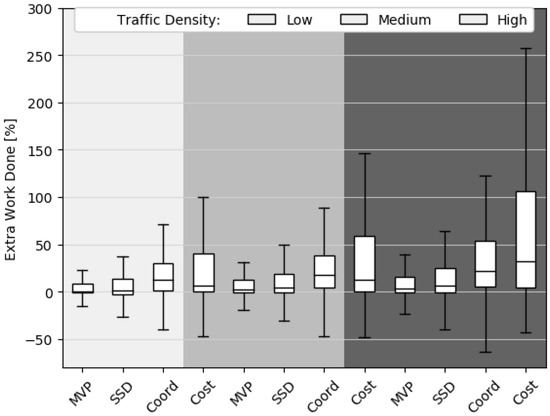
Figure 18.
Extra work done per flight and per CD&R method for manned aviation.
7. Discussion
7.1. Evaluation of Current Methods
From Table 3 and Table 4, most current CR methods have tactical planning, distributed control, and focus on a nominal predictability assumption propagating the current state. Within manned aviation, there is no clear preference between centralised or decentralised control, whereas in unmanned aviation most of the models resort to decentralised control as there is no defined central processing point for unmanned aviation yet. A considerable number of methods for unmanned aviation still focus solely on static obstacles, indicating that further development is still required for beyond visual line of sight (BVLOS) unmanned operations, where avoidance of other traffic is required. Given the increasing use of drones in applications such as package delivery in an urban setting, with traffic densities that are orders of magnitude higher than any observed in manned aviation, the development of CD&R methods for unmanned aviation capable of avoiding both static and dynamic obstacles is a pressing issue.
7.2. Comparison of Conflict Resolution Methods
Experimental results displayed no significant disparity in terms of which type of CD&R method performs better between a manned and an unmanned environment. However, the differences in unmanned over manned aviation heavily favour the performance of the methods; lower speed of the involved aircraft and smaller minimum separation distance favour the prevention of losses of separation. For the characteristics of the experiment performed, MVP and SSD methods showed better results overall, in particular the MVP method. Having minimum path deviations for CR, reduced the effect of resolution manoeuvres on flight efficiency while still guaranteeing minimal LoSs. At high densities, tactical conflict resolutions can trigger conflict chain reactions due to the scarcity of airspace [145].
Two different reactive methods were used, MVP and SSD, in order to directly compare the behaviour of pairwise-summed and joint resolution approaches. The latter is better at conflict prevention, showing a lower number of conflicts (see Figure 11). While pairwise-summed methods like the MVP do tend to trigger more secondary conflicts during resolution in high-density traffic situations, the net result of this is often beneficial: The emergent behaviour of the traffic situation as a whole shows that these secondary conflicts are `used’ by the algorithm to distribute traffic, and `create room’ for resolutions that would otherwise not be apparent. As a result, its performance in terms of losses of separation is superior compared to a joint-resolution method. In addition it can be noted that other works [16,17] have shown, using the MVP method, that disallowing aircraft from turning into a conflict can help mitigate the number of secondary conflicts. While the SSD method has the lowest number of conflicts, it has the highest number of losses of separation from the four simulated CR methods (see Figure 13). When using the SSD method, having more surrounding aircraft will likely result in fewer solutions within the solution space. In extreme cases, a single joint solution may not even exist. As a result, the behaviour of a joint resolution CR method should be carefully considered when used in high traffic density environments. Additionally, when comparing the number of conflicts (see Figure 11) with the number of losses of separation (see Figure 13), it cannot be inferred that preventing secondary conflicts is always the best way to prevent losses of separation, as there is no direct correlation between these two values. Indeed it can be argued that, for some situations, not moving towards solving all conflicts immediately may be beneficial; due to scattering traffic, further away conflicts may be easier to resolve later on. Additionally, a joint resolution manoeuvre often results in a larger path deviation, which has a negative impact on the stability of the airspace.
The cost and coord methods showed differences in terms of safety and efficiency performance between the unmanned and manned environments. The former was better at preventing losses of separation and was more efficient in an unmanned aviation environment, whereas the latter had better efficiency and better success at preventing intrusions in a manned aviation environment. This proves that the success of weight coefficients and employed policies is dependent on the operational environment. Naturally the optimal heading/speed deviations to avoid losses of minimum separation depend heavily on the speeds and manoeuvring space between neighbouring aircraft. Having weight coefficients or policies which enforce the optimal avoidance manoeuvres is beneficially to safety. On the other hand, restraining aircraft from employing these optimal choices, when these differ from their preferred policies, may have a negative impact on the overall safety of the airspace. In comparison, methods MVP and SSD were not so sensitive to the differences between manned/unmanned environments.
7.3. Open and Common Simulation Platforms
The results herein obtained should be considered alongside the results produced by other researchers in simulations environments with different conditions. For Piedade [143], who used BlueSky for manned aviation with different scenarios and smaller traffic densities (from 9 ac/10,000 NM2 to 27 ac/10,000 NM2), similarly to the results herein obtained, the MVP method showed fewer losses of separation than the SSD model. In their implementations, Yang [33] was able to guarantee safe separation of 48 UAVs in a space of 22 NM2 and Hao [74] showed no LoSs for five manned aircraft in a 4400 NM2 scenario. These results should also be taken into account when considering the performance of these methods. However, it is impossible to directly compare these results from other researchers alone given the differences in scenarios and traffic densities. Moreover, it is difficult to extrapolate these results beyond the specific environment conditions and employed traffic densities. Such shows the importance of creating repeatable evaluation conditions, by using open platforms, and publicly sharing implementations, metrics, and data. To develop an open repository of reference simulation scenarios would allow for direct performance comparison and a more precise evaluation of the diverse proposed methods.
7.4. Impact of Implementation Characteristics
Implementation characteristics such as cost-function gains can significantly affect the outcome of an evaluation. As previously mentioned, we observed that the overall efficiency of the simulated CD&R methods involving either policies or cost functions, was highly dependent on the environment. It may be considered that further tuning of these policies/weights could improve the overall safety of the method, or even that in a different environment these methods would have significantly different performance. As a result, the several tuning options in CD&R methods should be carefully adjusted to the operating environment.
Furthermore, several implementation criteria affect the output of the same algorithm. Some of these criteria has been mentioned in this work: Update rate, performance, types of avoidance maneuver, turn frequency. Naturally, any limitation on these properties is expected to deteriorate the performance of the model.
In the simulations herein performed, similar implementation characteristics were used for all CD&R methods, to the extend possible given the differences in the algorithms. We intended not only to provide a first approach at a direct comparison, but also to emphasize how results are conditioned by implementation settings, which are often overlooked. These settings should be directly associated with the results, with the understanding that different tuning values, policies, weights, and environments can yield different evaluations of the same algorithm.
7.5. Impact of Simulation Properties
Fast-time simulation experiments are often used to provide insights on the advantages and disadvantages of conflict resolution strategies. However, it can be time consuming to develop a simulation environment to a high level of realism. It is of relevance to make clear assumptions regarding speed, altitude and spatial distributions of the aircraft. Sunil [146] researched how these assumptions affect the conflict outcome; non-ideal altitude and spatial distributions have the largest negative impact on the accuracy of the simulation results. It is necessary to guarantee an uniform density distribution to prevent traffic concentrations. A density `hotspot’, either vertically or horizontally, results in a higher number of conflicts relative to the ideal case, providing the wrong insights on the overall safety.
8. Conclusions
More than a hundred conflict resolution (CR) methods for manned and unmanned aviation were evaluated under a taxonomy based on avoidance planning, surveillance, control, trajectory propagation, predictability assumption, resolution manoeuvre, multi-actor conflict resolution, obstacle types, optimization, and method category. It was shown that, currently, most models involve tactical planning, distributed control, and focus on a nominal propagation of the current state of all involved aircraft. For unmanned aviation, more CR methods must be developed focusing on assuring minimum separation with both static and dynamic obstacles, as to aid beyond visual line of sight operations in an urban setting.
Furthermore, commonly used CR methods were analysed using open-source, multi-agent ATC simulation tool BlueSky [11], both for manned and unmanned aviation. The differences between the results here presented and previous research show the importance of creating repeatable evaluation conditions, by using open platforms, and publicly sharing implementations, metrics, and data. CD&R methods aim at relieving the workload of ATC services and assuring safe integration of UAVs into the civil airspace. However, a better notion of how current methods behave for specific traffic scenarios is essential in order to determine a way forward for improvement.
Author Contributions
Conceptualization M.R. and J.E.; software M.R, J.E. and J.H.; original draft preparation M.R.; review J.E. and J.H. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Duong, V.N. FREER: Free-Route Experimental Encounter Resolution—Initial Results; Technical Report; EUROCONTROL Experimental Centre BP 15: Bretigny-sur-Orge, France, 1997. [Google Scholar]
- Wilson, I. PHARE Advanced Tools Project Final Report; Technical Report; DOC 98-70-18; Eurocontrol: 96 rue de la Fusée, Brussels, Belgium, 1999. [Google Scholar]
- Barff, A. Summary of the Results of the Mediterranean Free Flight (MFF) Programme. Air Traffic Control Q. 2007, 15, 119–126. [Google Scholar] [CrossRef]
- Ballin, M.G.; Hoekstra, J.M.; Wing, D.J.; Lohr, G.W. Nasa langley and NLR research of distributed Air/Ground Traffic Management. In Proceedings of the AIAA’s Aircraft Technology, Integration, and Operations (ATIO) 2002 Technical Forum, Los Angeles, CA, USA, 1–3 October 2002. [Google Scholar] [CrossRef]
- Joint Planning and Development Office, Next Generation Air Transportation System (NextGen). Concept of Operations for the Next Generation Air Transportation System; Next Generation Air Transportation System Joint Planning & Development Office: Washington, DC, USA, 2011. [Google Scholar]
- SESAR JOINT UNDERTAKE. European ATM Master Plan; SESAR: Brussels, Belgium, 2020. [Google Scholar]
- Kuchar, J.; Yang, L. A review of conflict detection and resolution modeling methods. IEEE Trans. Intell. Transp. Syst. 2000, 1, 179–189. [Google Scholar] [CrossRef]
- FAA. FAA Modernization and Reform Act of 2012, Conference Report; Technical Report; FAA: Washington, DC, USA, 2012.
- International Civil Aviation Organization. ICAO Circular 328—Unmanned Aircraft Systems (UAS); Technical Report; ICAO: Montreal, QC, Canada, 2011. [Google Scholar]
- Jenie, Y.I.; van Kampen, E.J.; Ellerbroek, J.; Hoekstra, J.M. Taxonomy of Conflict Detection and Resolution Approaches for Unmanned Aerial Vehicle in an Integrated Airspace. IEEE Trans. Intell. Transp. Syst. 2017, 18, 558–567. [Google Scholar] [CrossRef]
- Hoekstra, J.; Ellerbroek, J. BlueSky ATC Simulator Project: An Open Data and Open Source Approach. In Proceedings of the Conference: International Conference for Research on Air Transportation, Philadelphia, PA, USA, 20–24 June 2016. [Google Scholar]
- Yang, L.C.; Kuchar, J.K. Using intent information in probabilistic conflict analysis. In 1998 Guidance, Navigation, and Control Conference and Exhibit; American Institute of Aeronautics and Astronautics Inc., AIAA: Boston, MA, USA, 1998; pp. 797–806. [Google Scholar] [CrossRef]
- Hwang, I.; Seah, C.E. Intent-Based Probabilistic Conflict Detection for the Next Generation Air Transportation System. Proc. IEEE 2008, 96, 2040–2059. [Google Scholar] [CrossRef]
- Porretta, M.; Schuster, W.; Majumdar, A.; Ochieng, W. Strategic conflict detection and resolution using aircraft intent information. J. Navig. 2010, 63, 61–88. [Google Scholar] [CrossRef]
- Liu, W.; Hwang, I. Probabilistic trajectory prediction and conflict detection for air traffic control. J. Guid. Control. Dyn. 2011, 34, 1779–1789. [Google Scholar] [CrossRef]
- Ruigrok, R.; Clari, M.V. The impact of aircraft intent information and traffic separation assurance responsibility on en-route airspace capacity. In Proceedings of the Conference: 5th FAA/EUROCONTROL ATM R&D Seminar, Budapest, Hungary, 23–27 June 2003. [Google Scholar]
- Ruigrok, R.; Hoekstra, J. Human factors evaluations of Free Flight Issues solved and issues remaining. Appl. Ergon. 2007, 38, 437–455. [Google Scholar] [CrossRef]
- Bilimoria, K.; Lee, H.; Mao, Z.H.; Feron, E. Comparison of centralized and decentralized conflict resolution strategies for multiple-aircraft problems. In Proceedings of the 18th Applied Aerodynamics Conference, Denver, CO, USA, 14–17 August 2000. [Google Scholar] [CrossRef]
- Doole, M.; Ellerbroek, J.; Hoekstra, J. Drone Delivery: Urban airspace traffic density estimation. In Proceedings of the Eighth SESAR Innovation Days, Salzburg, Austria, 3–7 December 2018. [Google Scholar]
- Durand, N.; Barnier, N. Does ATM Need Centralized Coordination? Autonomous Conflict Resolution Analysis in a Constrained Speed Environment. In Proceedings of the ATM seminar 2015, 11th USA/EUROPE Air Traffic Management R&D Seminar, Lisbon, Portugal, 23–25 June 2015. [Google Scholar]
- Hoekstra, J.; van Gent, R.; Ruigrok, R. Designing for safety: The `free flight’ air traffic management concept. Reliab. Eng. Syst. Saf. 2002, 75, 215–232. [Google Scholar] [CrossRef]
- Hoekstra, J.M.; Ruigrok, R.C.; Van Gent, R.N. Free Flight in a Crowded Airspace? FAA: Washington, DC, USA, 2000.
- Borrelli, F.; Subramanian, D.; Raghunathan, A.; Biegler, L. MILP and NLP Techniques for centralized trajectory planning of multiple unmanned air vehicles. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006; IEEE: Piscataway, NJ, USA, 2006. [Google Scholar] [CrossRef]
- Mart, R.; Reinelt, G. The Linear Ordering Problem: Exact and Heuristic Methods in Combinatorial Optimization, 1st ed.; Springer Publishing Company: New York, NY, USA, 2011. [Google Scholar]
- Alonso-Ayuso, A.; Escudero, L.F.; Martin-Campo, F.J.; Mladenovic, N. A VNS metaheuristic for solving the aircraft conflict detection and resolution problem by performing turn changes. J. Glob. Optim. 2014, 63, 583–596. [Google Scholar] [CrossRef]
- Liu, H.; Liu, F.; Zhang, X.; Guan, X.; Chen, J.; Savinaud, P. Aircraft conflict resolution method based on hybrid ant colony optimization and artificial potential field. Sci. China Inf. Sci. 2018, 61. [Google Scholar] [CrossRef]
- Sathyan, A.; Ernest, N.; Lavigne, L.; Cazaurang, F.; Kumar, M.; Cohen, K. A Genetic Fuzzy Logic Based Approach to Solving the Aircraft Conflict Resolution Problem. In AIAA Information Systems-AIAA Infotech @ Aerospace; American Institute of Aeronautics and Astronautics: Grapevine, TX, USA, 2017. [Google Scholar] [CrossRef]
- Rathbun, D.; Kragelund, S.; Pongpunwattana, A.; Capozzi, B. An evolution based path planning algorithm for autonomous motion of a UAV through uncertain environments. In Proceedings of the 21st Digital Avionics Systems Conference, Irvine, CA, USA, 27–31 October 2002; IEEE: Piscataway, NJ, USA, 2002. [Google Scholar] [CrossRef]
- FAA, D.O.T. Right-of-Way Rules: Except Water Operations, 14 CFR, pt. 91.113; FAA: Washington, DC, USA, 2004.
- Balasooriyan, S. Multi-aircraft Conflict Resolution using Velocity Obstacles. Master’s Thesis, Delft University of Technology, Delft, The Netherlands, 2017. [Google Scholar]
- Dam, S.V.; Mulder, M.; Paassen, R. The Use of Intent Information in an Airborne Self-Separation Assistance Display Design. In AIAA Guidance, Navigation, and Control Conference; American Institute of Aeronautics and Astronautics: Chicago, IL, USA, 2009. [Google Scholar] [CrossRef]
- Balachandran, S.; Munoz, C.; Consiglio, M.C. Implicitly Coordinated Detect and Avoid Capability for Safe Autonomous Operation of Small UAS. In Proceedings of the 17th AIAA Aviation Technology, Integration, and Operations Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- Yang, J.; Yin, D.; Niu, Y.; Shen, L. Distributed Cooperative Onboard Planning for the Conflict Resolution of Unmanned Aerial Vehicles. J. Guid. Control. Dyn. 2019, 42, 272–283. [Google Scholar] [CrossRef]
- International Civil Aviation Organization. Annex 2 to the Convention on International Civil Aviation, Rules of the Air, 10th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2005. [Google Scholar]
- Klaus, R.A.; McLain, T.W. A Radar-Based, Tree-Branching Sense and Avoid System for Small Unmanned Aircraft. In Proceedings of the AIAA Guidance, Navigation, and Control (GNC) Conference, Boston, MA, USA, 19–22 August 2013. [Google Scholar] [CrossRef]
- Teo, R.; Jang, J.S.; Tomlin, C. Automated multiple UAV flight—the Stanford DragonFly UAV Program. In Proceedings of the 2004 43rd IEEE Conference on Decision and Control (CDC) (IEEE Cat. No.04CH37601), Nassau, Bahamas, 14–17 December 2004; IEEE: Piscataway, NJ, USA, 2004. [Google Scholar] [CrossRef]
- Mao, Z.H.; Dugail, D.; Feron, E. Space Partition for Conflict Resolution of Intersecting Flows of Mobile Agents. IEEE Trans. Intell. Transp. Syst. 2007, 8, 512–527. [Google Scholar] [CrossRef]
- Treleaven, K.; Mao, Z.H. Conflict Resolution and Traffic Complexity of Multiple Intersecting Flows of Aircraft. IEEE Trans. Intell. Transp. Syst. 2008, 9, 633–643. [Google Scholar] [CrossRef]
- Christodoulou, M.; Kodaxakis, S. Automatic Commercial Aircraft-Collision Avoidance in Free Flight: The Three-Dimensional Problem. IEEE Trans. Intell. Transp. Syst. 2006, 7, 242–249. [Google Scholar] [CrossRef]
- Lupu, M.F.; Feron, E.; Mao, Z.H. Influence of Aircraft Maneuver Preference Variability on Airspace Usage. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1446–1461. [Google Scholar] [CrossRef]
- Hu, J.; Prandini, M.; Sastry, S. Optimal Coordinated Maneuvers for Three-Dimensional Aircraft Conflict Resolution. J. Guid. Control. Dyn. 2002, 25, 888–900. [Google Scholar] [CrossRef]
- Pallottino, L.; Feron, E.; Bicchi, A. Conflict resolution problems for air traffic management systems solved with mixed integer programming. IEEE Trans. Intell. Transp. Syst. 2002, 3, 3–11. [Google Scholar] [CrossRef]
- Archambault, N.; Durand, N. Scheduling heuristics for on-board sequential air conflict solving. In Proceedings of the 23rd Digital Avionics Systems Conference (IEEE Cat. No.04CH37576), Salt Lake City, UT, USA, 28–28 October 2004; Volume 1, pp. 481–483. [Google Scholar]
- Lin, C.; Nagarajan, V.; Gupta, R.; Rajaram, B. Efficient sequential consistency via conflict ordering. ACM SIGPLAN Notices 2012, 47, 273–286. [Google Scholar] [CrossRef]
- Karatzas, I.; Shreve, S.E.; Motion, B. Brownian Motion and Stochastic Calculus; Springer: New York, NY, USA, 1998; pp. 47–127. [Google Scholar] [CrossRef]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.M. CAMDA: Capacity Assessment Method for Decentralized Air Traffic Control. In Proceedings of the 2018 International Conference on Air Transportation (ICRAT), Barcelona, Spain, 26–29 June 2018. [Google Scholar]
- International Civil Aviation Organization. Doc 4444: Procedures for Air Navigation. Air Traffic Management, 16th ed.; International Civil Aviation Organization: Montreal, QC, Canada, 2016. [Google Scholar]
- Alejo, D.; Conde, R.; Cobano, J.; Ollero, A. Multi-UAV collision avoidance with separation assurance under uncertainties. In 2009 IEEE International Conference on Mechatronics; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar] [CrossRef]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.M.; Maas, J. Three-dimensional conflict count models for unstructured and layered airspace designs. Transp. Res. Part C Emerg. Technol. 2018, 95, 295–319. [Google Scholar] [CrossRef]
- Gawinowski, G.; Garcia, J.L.; Guerreau, R.; Weber, R.; Brochard, M. ERASMUS: A new path for 4D trajectory-based enablers to reduce the traffic complexity. In Proceedings of the 2007 IEEE/AIAA 26th Digital Avionics Systems Conference, Dallas, TX, USA, 21–25 October 2007; IEEE: Piscataway, NJ, USA, 2007. [Google Scholar] [CrossRef]
- Chaloulos, G.; Crück, E.; Lygeros, J. A simulation based study of subliminal control for air traffic management. Transp. Res. Part C Emerg. Technol. 2010, 18, 963–974. [Google Scholar] [CrossRef]
- Rey, D.; Rapine, C.; Fondacci, R.; Faouzi, N.E.E. Subliminal Speed Control in Air Traffic Management: Optimization and Simulation. Transp. Sci. 2016, 50, 240–262. [Google Scholar] [CrossRef]
- Mutuel, L.H.; Neri, P.; Paricaud, E. Initial 4D Trajectory Management Concept Evaluation. In Tenth USA/Europe Air Traffic Management Research and Development Seminar (ATM2013); FAA: Washington, DC, USA; Eurocontrol: Brussels, Belgium, 2013. [Google Scholar]
- Lambregts, A.A.; Tadema, J.; Rademaker, R.M.; Theunissen, E. Defining maximum safe maneuvering authority in 3D space required for autonomous integrated conflict resolution. In Proceedings of the 2009 IEEE/AIAA 28th Digital Avionics Systems Conference, Orlando, FL, USA, 23–29 October 2009; pp. 5.C.1-1–5.C.1-17. [Google Scholar]
- Centre, E.E. Base of Aircraft (BADA) Aircraft Performance Modelling Report; Technical Report EEC Technical/Scientific Report No. 2009-009; EUROCONTROL: Brussels, Belgium, 2009. [Google Scholar]
- Dietrich, T.; Krug, S.; Zimmermann, A. An empirical study on generic multicopter energy consumption profiles. In Proceedings of the 2017 Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017; pp. 1–6. [Google Scholar]
- Stolaroff, J.K.; Samaras, C.; O’Neill, E.R.; Lubers, A.; Mitchell, A.S.; Ceperley, D. Energy use and life cycle greenhouse gas emissions of drones for commercial package delivery. Nat. Commun. 2018, 9. [Google Scholar] [CrossRef]
- Burgess, D.; Altman, S.; Wood, M.L. TCAS: Maneuvering Aircraft in the Horizontal Plane. Linc. Lab. J. 1994, 7, 295–312. [Google Scholar]
- Kochenderfer, M.; Holland, J.; Chryssanthacopoulos, J. Next-Generation Airborne Collision Avoidance System. Linc. Lab. J. 2012, 19, 242–249. [Google Scholar]
- Vink, A.; Kauppinen, S.; Beers, J.; de Jong, K. Medium term conflict detection in EATCHIP phase III. In Proceedings of the 16th DASC. AIAA/IEEE Digital Avionics Systems Conference. Reflections to the Future, Irvine, CA, USA, 30 October 1997; IEEE: Piscataway, NJ, USA, 1997. [Google Scholar] [CrossRef]
- Cafieri, S.; Omheni, R. Mixed-integer nonlinear programming for aircraft conflict avoidance by sequentially applying velocity and heading angle changes. Eur. J. Oper. Res. 2017, 260, 283–290. [Google Scholar] [CrossRef]
- Vela, A.E.; Solak, S.; Clarke, J.P.B.; Singhose, W.E.; Barnes, E.R.; Johnson, E.L. Near Real-Time Fuel-Optimal En Route Conflict Resolution. IEEE Trans. Intell. Transp. Syst. 2010, 11, 826–837. [Google Scholar] [CrossRef]
- Chen, W.; Chen, J.; Shao, Z.; Biegler, L.T. Three-Dimensional Aircraft Conflict Resolution Based on Smoothing Methods. J. Guid. Control. Dyn. 2016, 39, 1481–1490. [Google Scholar] [CrossRef]
- Ny, J.L.; Pappas, G.J. Geometric programming and mechanism design for air traffic conflict resolution. In Proceedings of the 2010 American Control Conference, Baltimore, MD, USA, 30 June–2 July 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar] [CrossRef]
- Niedringhaus, W. Stream Option Manager (SOM): Automated integration of aircraft separation, merging, stream management, and other air traffic control functions. IEEE Trans. Syst. Man Cybern. 1995, 25, 1269–1280. [Google Scholar] [CrossRef]
- Alonso-Ayuso, A.; Escudero, L.F.; Martín-Campo, F.J.; Mladenović, N. On the aircraft conflict resolution problem: A VNS approach in a multiobjective framework. Electron. Notes Discret. Math. 2017, 58, 151–158. [Google Scholar] [CrossRef]
- Durand, N.; Alliot, J.M.; Chansou, O. Optimal Resolution of En Route Conflicts. Air Traffic Control Q. 1995, 3, 139–161. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, J.; Cai, K.Q.; Prandini, M. Multi-aircraft Conflict Detection and Resolution Based on Probabilistic Reach Sets. IEEE Trans. Control Syst. Technol. 2017, 25, 309–316. [Google Scholar] [CrossRef]
- Yang, Y.; Zhang, J.; quan Cai, K.; Prandini, M. A stochastic reachability analysis approach to aircraft conflict detection and resolution. In Proceedings of the 2014 IEEE Conference on Control Applications (CCA), Juan Les Antibes, France, 8–10 October 2014. [Google Scholar] [CrossRef]
- Allignol, C.; Barnier, N.; Durand, N.; Alliot, J.M. A New Framework for Solving En Route Conflicts. Air Traffic Control Q. 2013, 21, 233–253. [Google Scholar] [CrossRef][Green Version]
- Tomlin, C.; Mitchell, I.; Ghosh, R. Safety verification of conflict resolution manoeuvres. IEEE Trans. Intell. Transp. Syst. 2001, 2, 110–120. [Google Scholar] [CrossRef]
- Visintini, A.L.; Glover, W.; Lygeros, J.; Maciejowski, J. Monte Carlo Optimization for Conflict Resolution in Air Traffic Control. IEEE Trans. Intell. Transp. Syst. 2006, 7, 470–482. [Google Scholar] [CrossRef]
- Prandini, M.; Lygeros, J.; Nilim, A.; Sastry, S. A probabilistic framework for aircraft conflict detection. In Proceedings of the Guidance, Navigation, and Control Conference and Exhibit, Portland, OR, USA, 9–11 August 1999. [Google Scholar] [CrossRef]
- Hao, S.; Cheng, S.; Zhang, Y. A multi-aircraft conflict detection and resolution method for 4-dimensional trajectory-based operation. Chin. J. Aeronaut. 2018, 31, 1579–1593. [Google Scholar] [CrossRef]
- Chipalkatty, R.; Twu, P.; Rahmani, A.R.; Egerstedt, M. Merging and Spacing of Heterogeneous Aircraft in Support of NextGen. J. Guid. Control. Dyn. 2012, 35, 1637–1646. [Google Scholar] [CrossRef]
- Pritchett, A.R.; Genton, A. Negotiated Decentralized Aircraft Conflict Resolution. IEEE Trans. Intell. Transp. Syst. 2018, 19, 81–91. [Google Scholar] [CrossRef]
- Sislak, D.; Volf, P.; Pechoucek, M. Agent-Based Cooperative Decentralized Airplane-Collision Avoidance. IEEE Trans. Intell. Transp. Syst. 2011, 12, 36–46. [Google Scholar] [CrossRef]
- Harper, K.; Mulgund, S.; Guarino, S.; Mehta, A.; Zacharias, G. Air traffic controller agent model for free flight. In Proceedings of the Guidance, Navigation, and Control Conference and Exhibit, Portland, OR, USA, 9–11 August 1999. [Google Scholar] [CrossRef]
- Hoffman, E.; Bonnans, F.; Blin, K.; Zeghal, K. Conflict resolution in presence of uncertainty—A case study of decision making with dynamic programming. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Montreal, QC, Canada, 6–9 August 2001. [Google Scholar] [CrossRef]
- Bicchi, A.; Pallottino, L. On optimal cooperative conflict resolution for air traffic management systems. IEEE Trans. Intell. Transp. Syst. 2000, 1, 221–231. [Google Scholar] [CrossRef]
- Granger, G.; Durand, N.; Alliot, J.M. Token Allocation Strategy for Free-Flight Conflict Solving. In Proceedings of the Thirteenth Innovative Applications of Artificial Intelligence, Seattle, WA, USA, 7–9 August 2001. [Google Scholar]
- Paielli, R.A. Modeling Maneuver Dynamics in Air Traffic Conflict Resolution. J. Guid. Control. Dyn. 2003, 26, 407–415. [Google Scholar] [CrossRef]
- Velasco, G.A.M.; Borst, C.; Ellerbroek, J.; van Paassen, M.M.; Mulder, M. The Use of Intent Information in Conflict Detection and Resolution Models Based on Dynamic Velocity Obstacles. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2297–2302. [Google Scholar] [CrossRef]
- Huang, S.; Feron, E.; Reed, G.; Mao, Z.H. Compact Configuration of Aircraft Flows at Intersections. IEEE Trans. Intell. Transp. Syst. 2014, 15, 771–783. [Google Scholar] [CrossRef]
- von Viebahn, H.; Schiefele, J. Method for detecting and avoiding flight hazards. In Enhanced and Synthetic Vision 1997; Verly, J.G., Ed.; SPIE: Bellingham, WA, USA, 1997. [Google Scholar] [CrossRef]
- Devasia, S.; Iamratanakul, D.; Chatterji, G.; Meyer, G. Decoupled conflict-resolution procedures for decentralized air traffic control. In Proceedings of the 2009 IEEE International Conference on Control Applications, St. Petersburg, Russia, 8–10 July 2009; IEEE: Piscataway, NJ, USA, 2009. [Google Scholar] [CrossRef]
- Zhao, Y.; Schultz, R.; Zhao, Y.; Schultz, R. Deterministic resolution of two aircraft conflict in free flight. In Proceedings of the Guidance, Navigation, and Control Conference, New Orleans, LA, USA, 11–13 August 1997. [Google Scholar] [CrossRef]
- Mao, Z.H.; Feron, E.; Bilimoria, K. Stability and performance of intersecting aircraft flows under decentralized conflict avoidance rules. IEEE Trans. Intell. Transp. Syst. 2001, 2, 101–109. [Google Scholar] [CrossRef]
- Bilimoria, K.; Sridhar, B.; Chatterji, G. Effects of conflict resolution maneuvers and traffic density on free flight. In Proceedings of the Guidance, Navigation, and Control Conference, San Diego, CA, USA, 29–31 July 1996. [Google Scholar] [CrossRef]
- Krozel, J.; Peters, M. Conflict Detection and Resolution for Free Flight. Air Traffic Control Q. 1997, 5, 181–212. [Google Scholar] [CrossRef]
- Zhang, J.; Wu, J.; Song, T. Study of Multi-aircraft Conflict Resolution and Algorithm Optimization Based on Genetic Algorithm. In Proceedings of the 2014 International Conference on Computer, Communications and Information Technology; Atlantis Press: Paris, France, 2014. [Google Scholar] [CrossRef]
- Peng, L.; Lin, Y. Study on the Model for Horizontal Escape Maneuvers in TCAS. IEEE Trans. Intell. Transp. Syst. 2010, 11, 392–398. [Google Scholar] [CrossRef]
- Menon, P.K.; Sweriduk, G.D.; Sridhar, B. Optimal Strategies for Free-Flight Air Traffic Conflict Resolution. J. Guid. Control. Dyn. 1999, 22, 202–211. [Google Scholar] [CrossRef]
- Burdun, I.; Parfentyev, O. AI knowledge model for self-organizing conflict prevention/resolution in close free-flight air space. In Proceedings of the 1999 IEEE Aerospace Conference (Cat. No.99TH8403), Snowmass at Aspen, CO, USA, 7 March 1999; IEEE: Piscataway, NJ, USA, 1999. [Google Scholar] [CrossRef]
- Patel, R.B.; Goulart, P.J. Trajectory Generation for Aircraft Avoidance Maneuvers Using Online Optimization. J. Guid. Control. Dyn. 2011, 34, 218–230. [Google Scholar] [CrossRef]
- Alonso-Mora, J.; Naegeli, T.; Siegwart, R.; Beardsley, P. Collision avoidance for aerial vehicles in multi-agent scenarios. Auton. Robot. 2015, 39, 101–121. [Google Scholar] [CrossRef]
- Kelly, A.; Stentz, A.; Amidi, O.; Bode, M.; Bradley, D.; Diaz-Calderon, A.; Happold, M.; Herman, H.; Mandelbaum, R.; Pilarski, T.; et al. Toward Reliable Off Road Autonomous Vehicles Operating in Challenging Environments. Int. J. Robot. Res. 2006, 25, 449–483. [Google Scholar] [CrossRef]
- Ong, H.Y.; Kochenderfer, M.J. Markov Decision Process-Based Distributed Conflict Resolution for Drone Air Traffic Management. J. Guid. Control. Dyn. 2017, 40, 69–80. [Google Scholar] [CrossRef]
- Beard, R.; McLain, T.; Goodrich, M.; Anderson, E. Coordinated target assignment and intercept for unmanned air vehicles. IEEE Trans. Robot. Autom. 2002, 18, 911–922. [Google Scholar] [CrossRef]
- Nikolos, I.; Valavanis, K.; Tsourveloudis, N.; Kostaras, A. Evolutionary algorithm based offline/online path planner for uav navigation. IEEE Trans. Syst. Man Cybern. Part B (Cybernetics) 2003, 33, 898–912. [Google Scholar] [CrossRef]
- Ho, F.; Geraldes, R.; Goncalves, A.; Cavazza, M.; Prendinger, H. Improved Conflict Detection and Resolution for Service UAVs in Shared Airspace. IEEE Trans. Veh. Technol. 2019, 68, 1231–1242. [Google Scholar] [CrossRef]
- Liao, T. UAV Collision Avoidance using A* Algorithm. Master’s Thesis, Auburn University, Auburn, AL, USA, 2012. [Google Scholar]
- Richards, A.; How, J. Model predictive control of vehicle maneuvers with guaranteed completion time and robust feasibility. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003; IEEE: Piscataway, NJ, USA, 2003. [Google Scholar] [CrossRef]
- Fasano, G.; Accardo, D.; Moccia, A.; Carbone, C.; Ciniglio, U.; Corraro, F.; Luongo, S. Multi-Sensor-Based Fully Autonomous Non-Cooperative Collision Avoidance System for Unmanned Air Vehicles. J. Aerosp. Comput. Inform. Commun. 2008, 5, 338–360. [Google Scholar] [CrossRef]
- Langelaan, J.W. State Estimation for Autonomous Flight in Cluttered Environments. J. Guid. Control. Dyn. 2007, 30, 1414–1426. [Google Scholar] [CrossRef]
- Obermeyer, K.J.; Oberlin, P.; Darbha, S. Sampling-Based Path Planning for a Visual Reconnaissance Unmanned Air Vehicle. J. Guid. Control. Dyn. 2012, 35, 619–631. [Google Scholar] [CrossRef]
- Park, J.W.; Oh, H.D.; Tahk, M.J. UAV collision avoidance based on geometric approach. In Proceedings of the 2008 SICE Annual Conference, Tokyo, Japan, 20–22 August 2008; IEEE: Piscataway, NJ, USA, 2008. [Google Scholar] [CrossRef]
- bin Duan, H.; yin Zhang, X.; Wu, J.; jun Ma, G. Max-Min Adaptive Ant Colony Optimization Approach to Multi-UAVs Coordinated Trajectory Replanning in Dynamic and Uncertain Environments. J. Bionic Eng. 2009, 6, 161–173. [Google Scholar] [CrossRef]
- Manathara, J.G.; Ghose, D. Rendezvous of multiple UAVs with collision avoidance using consensus. J. Aerosp. Eng. 2012, 25, 480–489. [Google Scholar] [CrossRef]
- Prévost, C.G.; Desbiens, A.; Gagnon, E.; Hodouin, D. Unmanned Aerial Vehicle Optimal Cooperative Obstacle Avoidance in a Stochastic Dynamic Environment. J. Guid. Control. Dyn. 2011, 34, 29–43. [Google Scholar] [CrossRef]
- Zeitlin, A.; McLaughlin, M. Safety of cooperative collision avoidance for unmanned aircraft. IEEE Aerosp. Electron. Syst. Mag. 2007, 22, 9–13. [Google Scholar] [CrossRef]
- Yang, J.; Yin, D.; Niu, Y.; Zhu, L. Cooperative conflict detection and resolution of civil unmanned aerial vehicles in metropolis. Adv. Mech. Eng. 2016, 8. [Google Scholar] [CrossRef]
- Mujumdar, A.; Padhi, R. Reactive Collision Avoidance of Using Nonlinear Geometric and Differential Geometric Guidance. J. Guid. Control. Dyn. 2011, 34, 303–311. [Google Scholar] [CrossRef]
- Jenie, Y.I.; van Kampen, E.J.; de Visser, C.C.; Ellerbroek, J.; Hoekstra, J.M. Selective Velocity Obstacle Method for Deconflicting Maneuvers Applied to Unmanned Aerial Vehicles. J. Guid. Control. Dyn. 2015, 38, 1140–1146. [Google Scholar] [CrossRef]
- Leonard, J.; Savvaris, A.; Tsourdos, A. Distributed reactive collision avoidance for a swarm of quadrotors. Proc. Inst. Mech. Eng. Part G: J. Aerosp. Eng. 2016, 231, 1035–1055. [Google Scholar] [CrossRef]
- Yang, H.; Zhao, Y. Trajectory Planning for Autonomous Aerospace Vehicles amid Known Obstacles and Conflicts. J. Guid. Control Dyn. 2004, 27, 997–1008. [Google Scholar] [CrossRef]
- Zhu, C.; Liang, X.; He, L.; Xu, G.; Li, Y. Conflict Resolution of Aircraft Swarms Based on Interactive Multi-model. In Proceedings of the 2017 International Conference on Artificial Intelligence, Automation and Control Technologies—AIACT ’17, Wuhan, China, 7–9 April 2017; ACM Press: New York, NY, USA, 2017. [Google Scholar] [CrossRef]
- Hwang, I.; Kim, J.; Tomlin, C. Protocol-Based Conflict Resolution for Air Traffic Control. Air Traffic Control Q. 2007, 15, 1–34. [Google Scholar] [CrossRef]
- Jilkov, V. An Efficient Algorithm for Aircraft Conflict Detection and Resolution Using List Viterbi Algorithm. In Proceedings of the 18th International Conference on Information Fusion, Washington, DC, USA, 6–9 July 2015; pp. 1709–1716. [Google Scholar]
- Hurley, R.; Lind, R.; Kehoe, J. A Torus Based Three Dimensional Motion Planning Model for Very Maneuverable Micro Air Vehicles. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar] [CrossRef]
- Kitamura, Y.; Tanaka, T.; Kishino, F.; Yachida, M. 3-D path planning in a dynamic environment using an octree and an artificial potential field. In Proceedings of the 1995 IEEE/RSJ International Conference on Intelligent Robots and Systems, Human Robot Interaction and Cooperative Robots, Pittsburgh, PA, USA, 5–9 August 1995; IEEE Comput. Soc. Press: Piscataway, NJ, USA, 1995. [Google Scholar] [CrossRef]
- Hrabar, S. Reactive obstacle avoidance for Rotorcraft UAVs. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar] [CrossRef]
- Jung, D.; Tsiotras, P. On-Line Path Generation for Unmanned Aerial Vehicles Using B-Spline Path Templates. J. Guid. Control. Dyn. 2013, 36, 1642–1653. [Google Scholar] [CrossRef]
- Schmitt, L.; Fichter, W. Collision-Avoidance Framework for Small Fixed-Wing Unmanned Aerial Vehicles. J. Guid. Control. Dyn. 2014, 37, 1323–1329. [Google Scholar] [CrossRef]
- Chowdhary, G.; Sobers, D.M.; Pravitra, C.; Christmann, C.; Wu, A.; Hashimoto, H.; Ong, C.; Kalghatgi, R.; Johnson, E.N. Self-Contained Autonomous Indoor Flight with Ranging Sensor Navigation. J. Guid. Control. Dyn. 2012, 35, 1843–1854. [Google Scholar] [CrossRef]
- Beyeler, A.; Zufferey, J.C.; Floreano, D. Vision-based control of near-obstacle flight. Auton. Robot. 2009, 27, 201–219. [Google Scholar] [CrossRef]
- de Croon, G.; Wagter, C.D.; Remes, B.; Ruijsink, R. Sky Segmentation Approach to obstacle avoidance. In Proceedings of the 2011 Aerospace Conference, Big Sky, MT, USA, 5–12 March 2011; IEEE: Piscataway, NJ, USA, 2011. [Google Scholar] [CrossRef]
- de Croon, G.; de Weerdt, E.; de Wagter, C.; Remes, B. The appearance variation cue for obstacle avoidance. In Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, China, 14–18 December 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar] [CrossRef]
- Muller, J.; Ruiz, A.V.; Wieser, I. Safe & sound: A robust collision avoidance layer for aerial robots based on acoustic sensors. In Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium—PLANS 2014, Monterey, CA, USA, 5–8 May 2014; IEEE: Piscataway, NJ, USA, 2014. [Google Scholar] [CrossRef]
- Ellerbroek, J.; Hoekstra, J. MJRibeiroTUDelft. In Bluesky implementation: Underlying the Publication Review of Conflict Resolution Methods for Manned and Unmanned Aviation; 4TU.Centre for Research Data: Delft, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Ribeiro, M.; Ellerbroek, J.; Hoekstra, J. Bluesky data: Underlying the Publication “Review of Conflict Resolution Methods for Manned and Unmanned Aviation”; 4TU.Centre for Research Data: Delft, The Netherlands, 2020. [Google Scholar] [CrossRef]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.; Vidosavljevic, A.; Arntzen, M.; Bussink, F.; Nieuwenhuisen, D. Analysis of Airspace Structure and Capacity for Decentralized Separation Using Fast-Time Simulations. J. Guid. Control. Dyn. 2017, 40, 38–51. [Google Scholar] [CrossRef]
- Sun, J.; Hoekstra, J.M.; Ellerbroek, J. Open Aircraft Performance Modeling: Based on an Analysis of Aircraft Surveillance Data. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2019. [Google Scholar]
- Yousef, M.; Iqbal, F.; Hussain, M. Drone Forensics: A Detailed Analysis of Emerging DJI Models. In Proceedings of the 2020 11th International Conference on Information and Communication Systems (ICICS), Irbid, Jordan, 7–9 April 2020; pp. 66–71. [Google Scholar]
- Dorafshan, S.; Maguire, M.; Hoffer, N.V.; Coopmans, C. Challenges in bridge inspection using small unmanned aerial systems: Results and lessons learned. In Proceedings of the 2017 International Conference on Unmanned Aircraft Systems (ICUAS), Miami, FL, USA, 13–16 June 2017; pp. 1722–1730. [Google Scholar]
- Świerczynski, S.; Felski, A. Determination of the Position Using Receivers Installed in UAV. In Proceedings of the 2019 European Navigation Conference (ENC), Warsaw, Poland, 9–12 April 2019; pp. 1–4. [Google Scholar]
- EUROCONTROL. Performance Review Report An Assessment of Air Traffic Management in Europe during the Calendar Year 2018; EUROCONTROL: Brussels, Belgium, 2018. [Google Scholar]
- Fiorini, P.; Shiller, Z. Motion Planning in Dynamic Environments Using Velocity Obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Chakravarthy, A.; Ghose, D. Obstacle avoidance in a dynamic environment: A collision cone approach. IEEE Trans. Syst. Man, Cybern. Part A Syst. Hum. 1998, 28, 562–574. [Google Scholar] [CrossRef]
- Eby, M. A self-organizational approach for resolving air traffic conflicts. Linc. Lab. J. 1994, 7, 2. [Google Scholar]
- Vatti, B.R. A generic solution to polygon clipping. Commun. ACM 1992, 35, 56–63. [Google Scholar] [CrossRef]
- Bilimoria, K.; Sheth, K.; Lee, H.; Grabbe, S. Performance evaluation of airborne separation assurance for free flight. In 18th Applied Aerodynamics Conference; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2000. [Google Scholar] [CrossRef]
- Piedade, L. Aircraft Conflict Prioritization and Resolution using the Solution Space Diagram. Master’s Thesis, Instituto Superior Tecnico, Lisbon, Portugal, 2018. [Google Scholar]
- Hoekstra, J. Designing for Safety: The Free Flight Air Traffic Management Concept. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 2001. [Google Scholar]
- Sunil, E.; Ellerbroek, J.; Hoekstra, J.; Maas, J. Modeling airspace stability and capacity for decentralized separation. In Proceedings of the 12th USA/Europe Air Traffic Management R&D Seminar, Seattle, WA, USA, 26–30 June 2017. [Google Scholar]
- Sunil, E.; Olafure, Þ.; Ellerbroek, J.; Hoekstra, J. Analyzing the Effect of Traffic Scenario Properties on Conflict Count Models. In Proceedings of the Conference: 2018 International Conference for Research on Air Transportation, Barcelona, Spain, 26–29 June 2018. [Google Scholar]






© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).