Experimental and Numerical Icing Penalties of an S826 Airfoil at Low Reynolds Numbers



Abstract
1. Introduction
2. Icing Cases
2.1. Baseline Airfoil
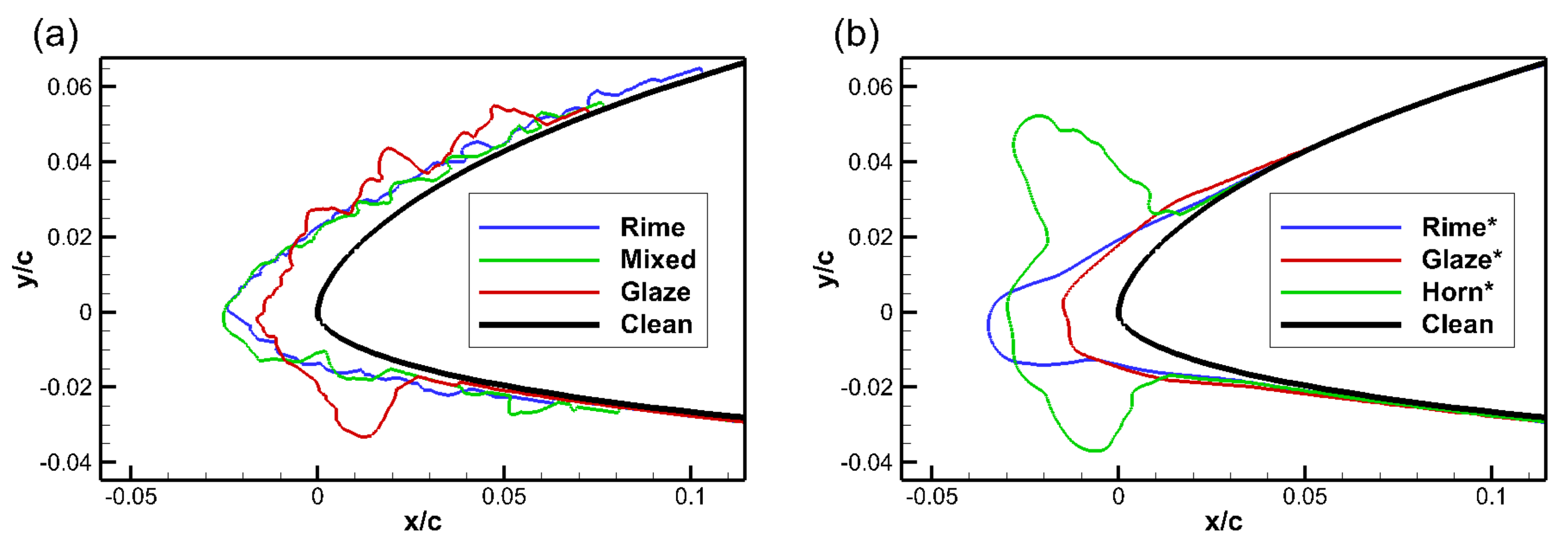
2.2. IWT Ice Shapes
2.3. LEWICE Ice Shapes
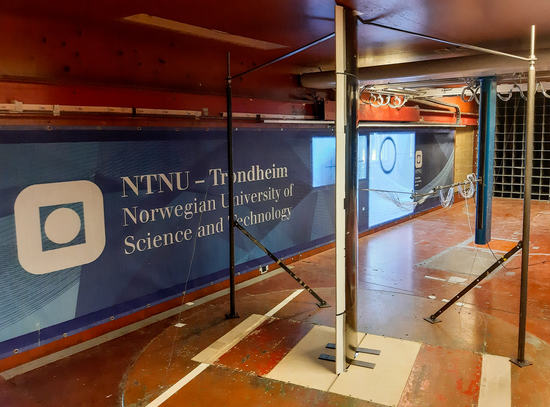
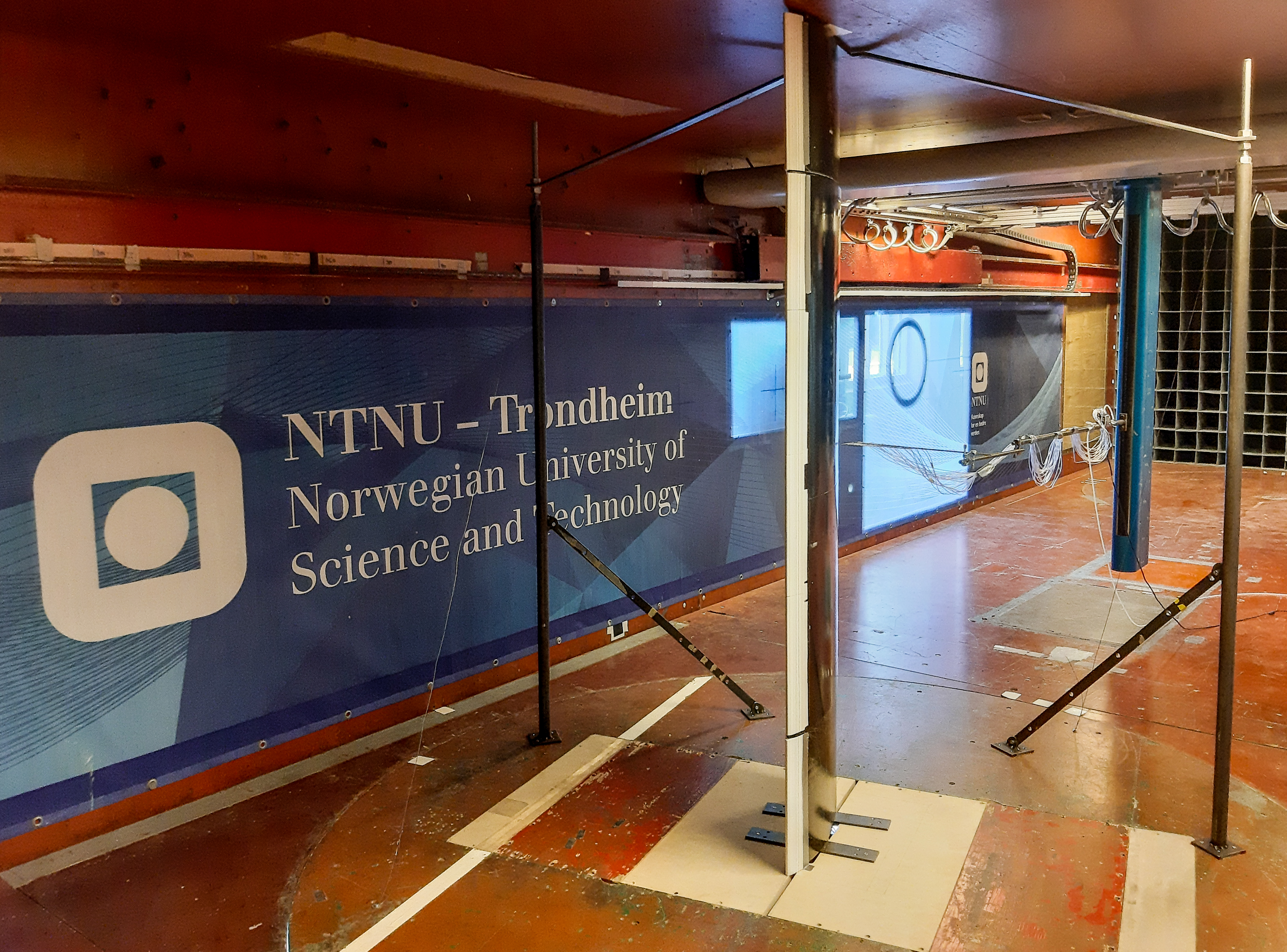
3. Experimental Setup
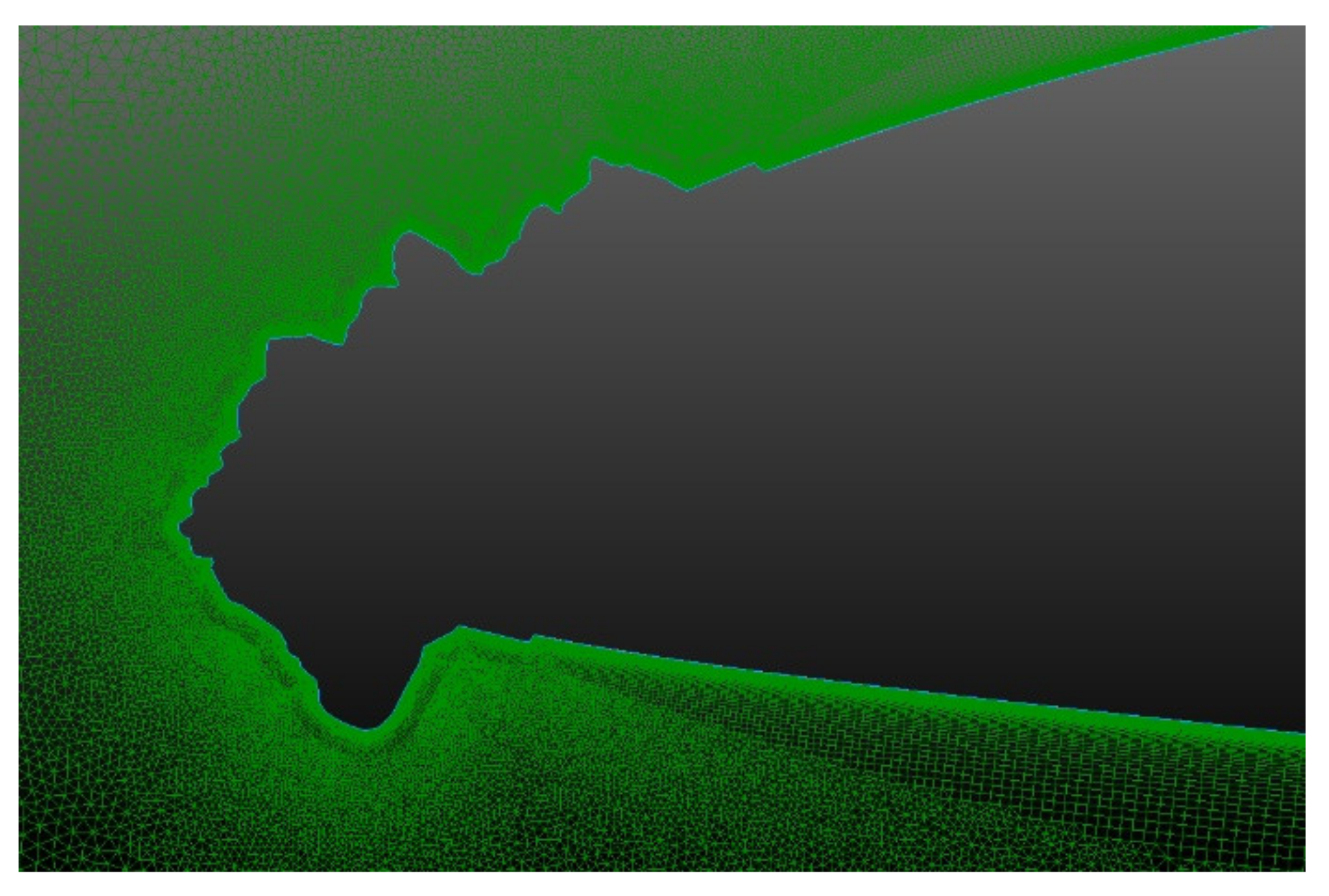
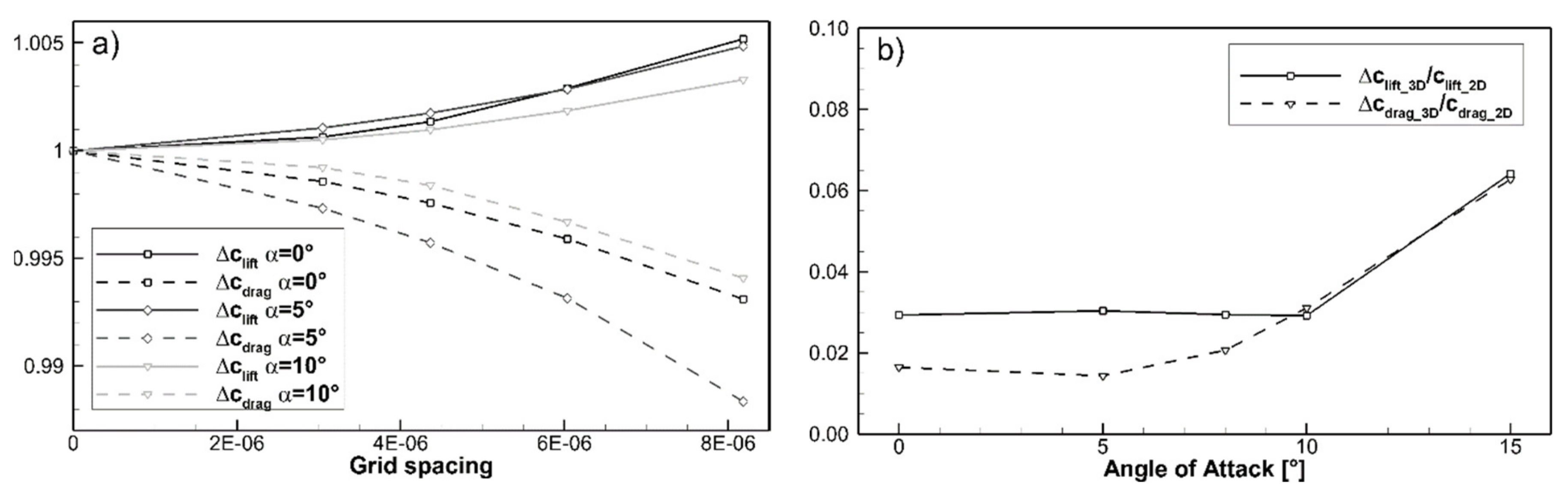
4. Numerical Methods
5. Experimental Results
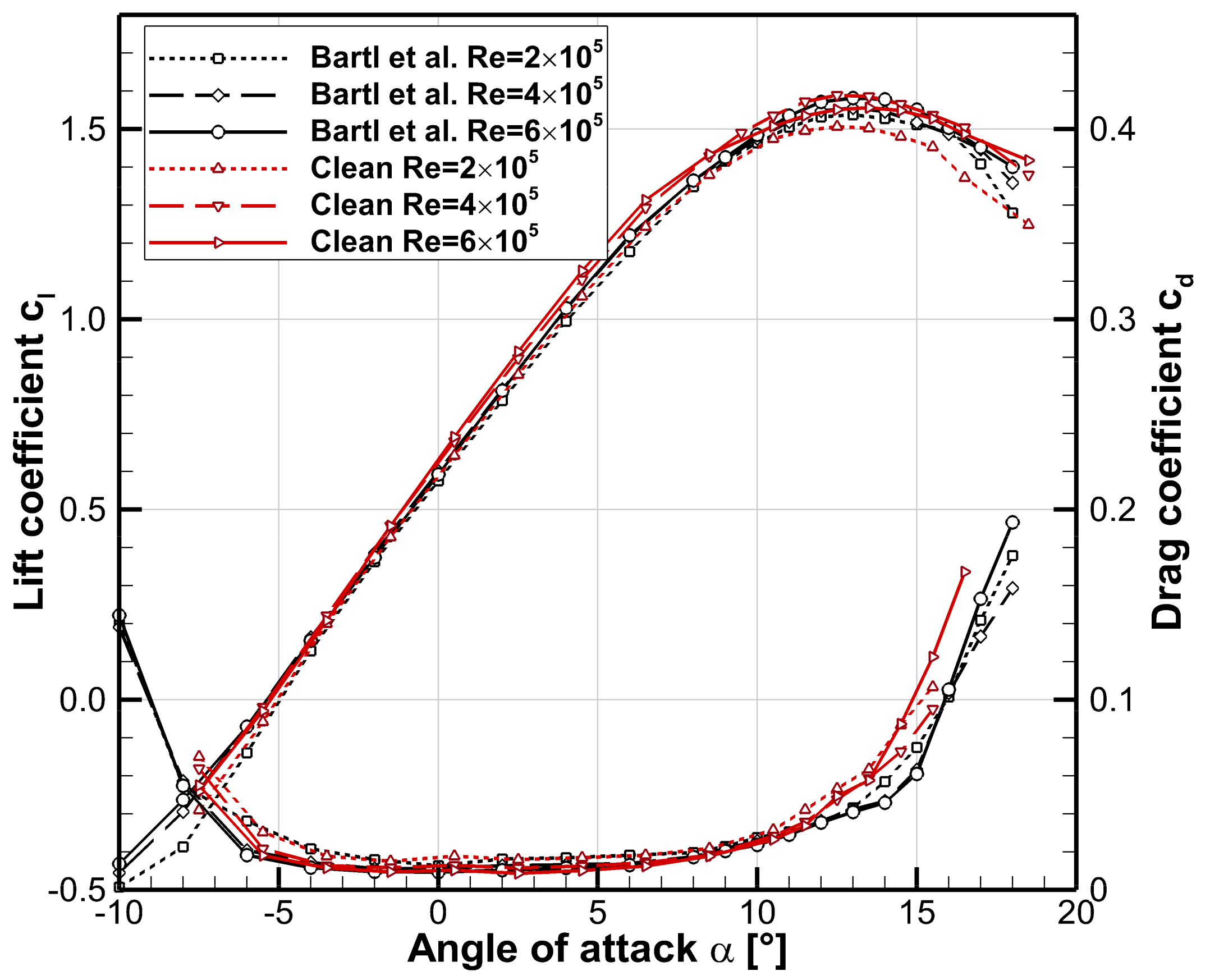
5.1. Comparison to Existing Data
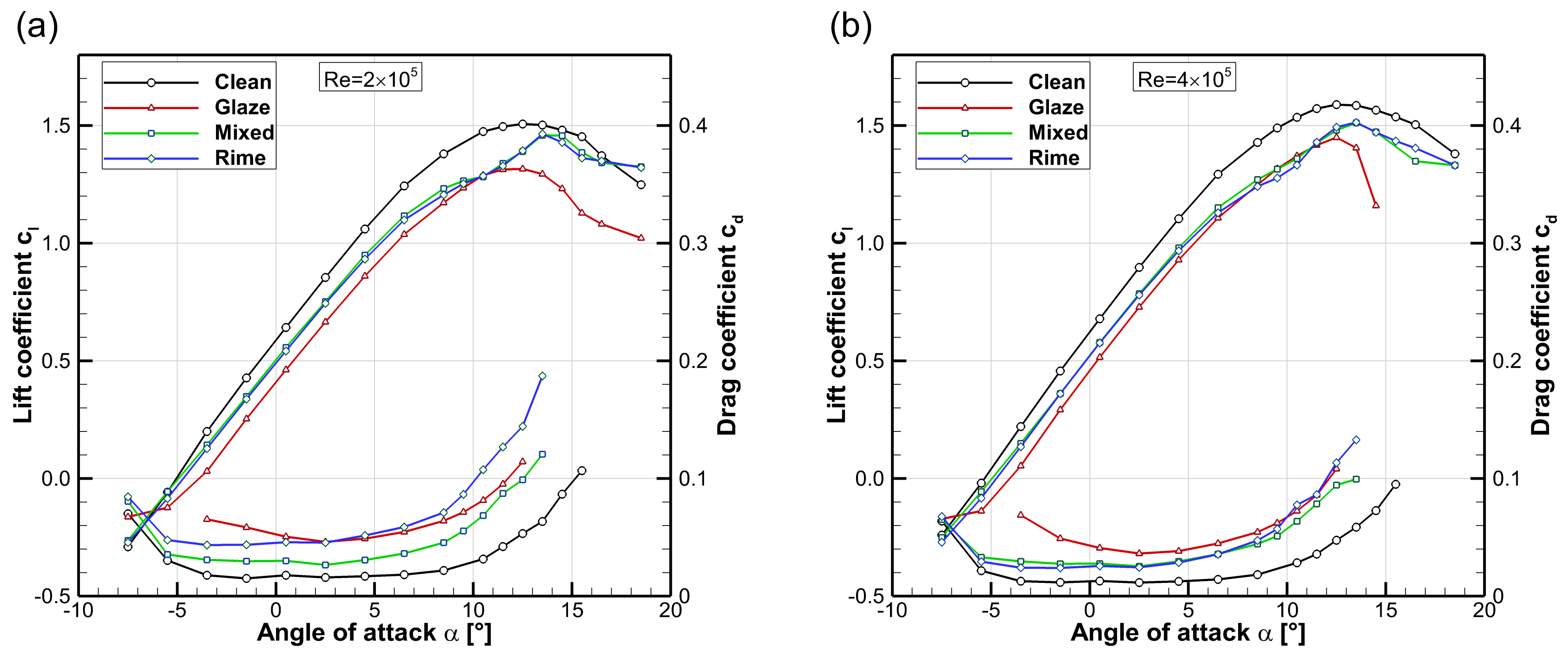
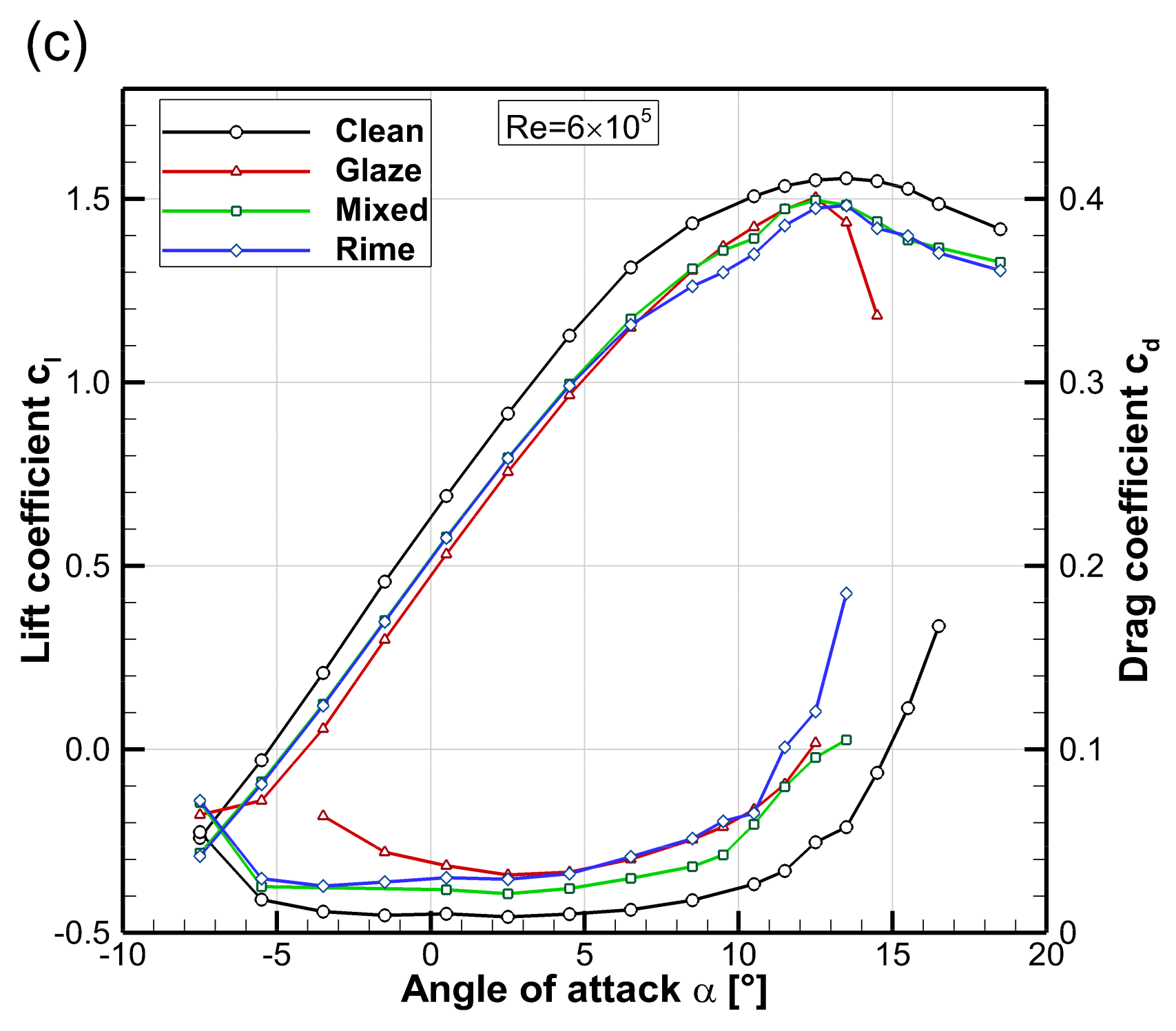
5.2. IWT Ice Shapes
5.3. LEWICE Ice Shapes
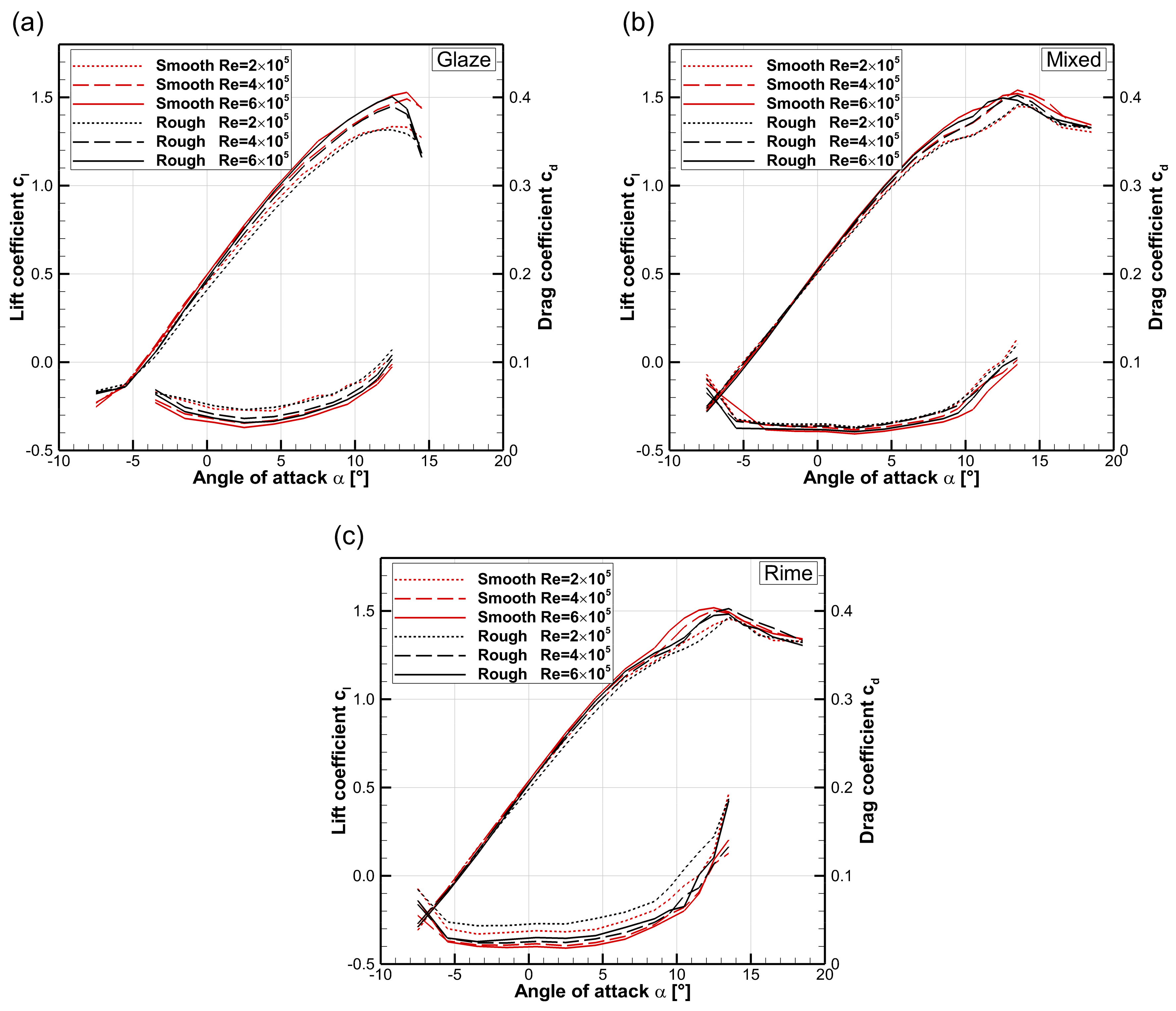
5.4. Influence of Roughness
6. Simulation Results
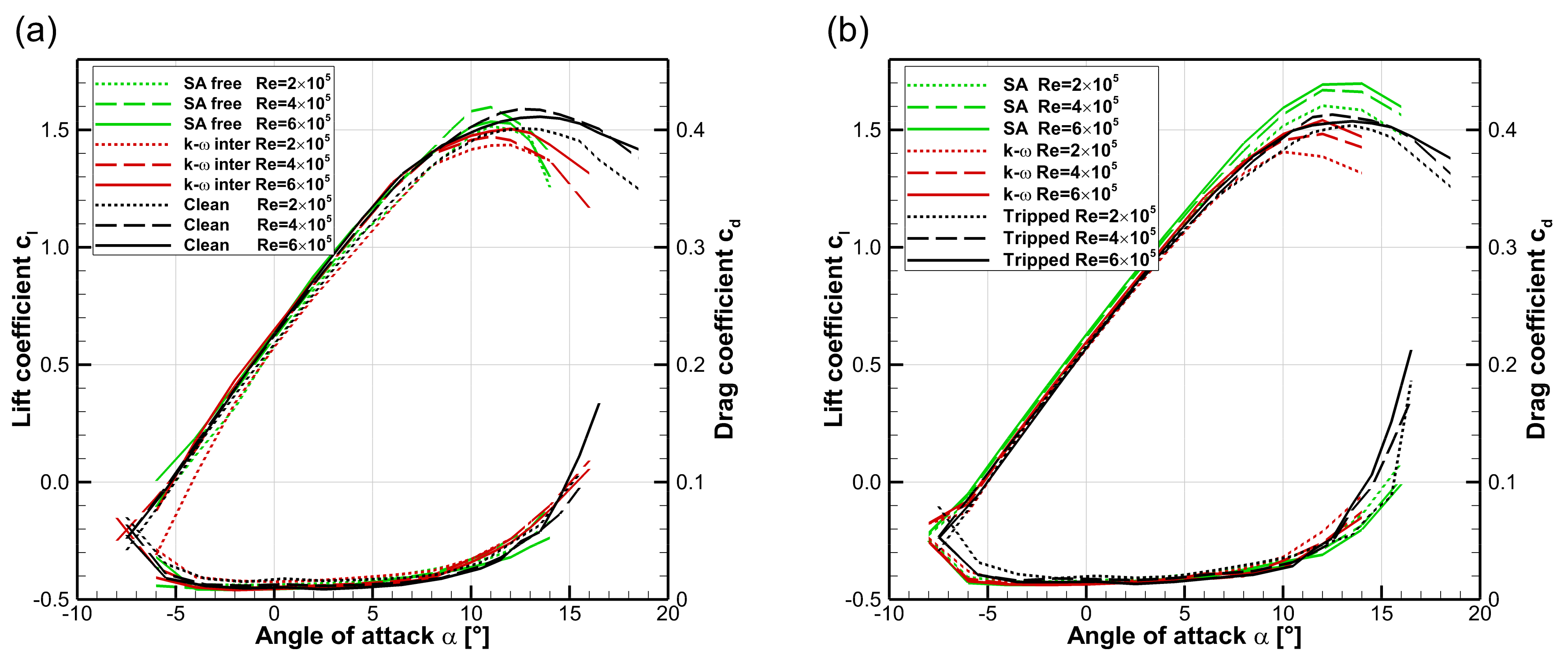
6.1. Clean and Tripped
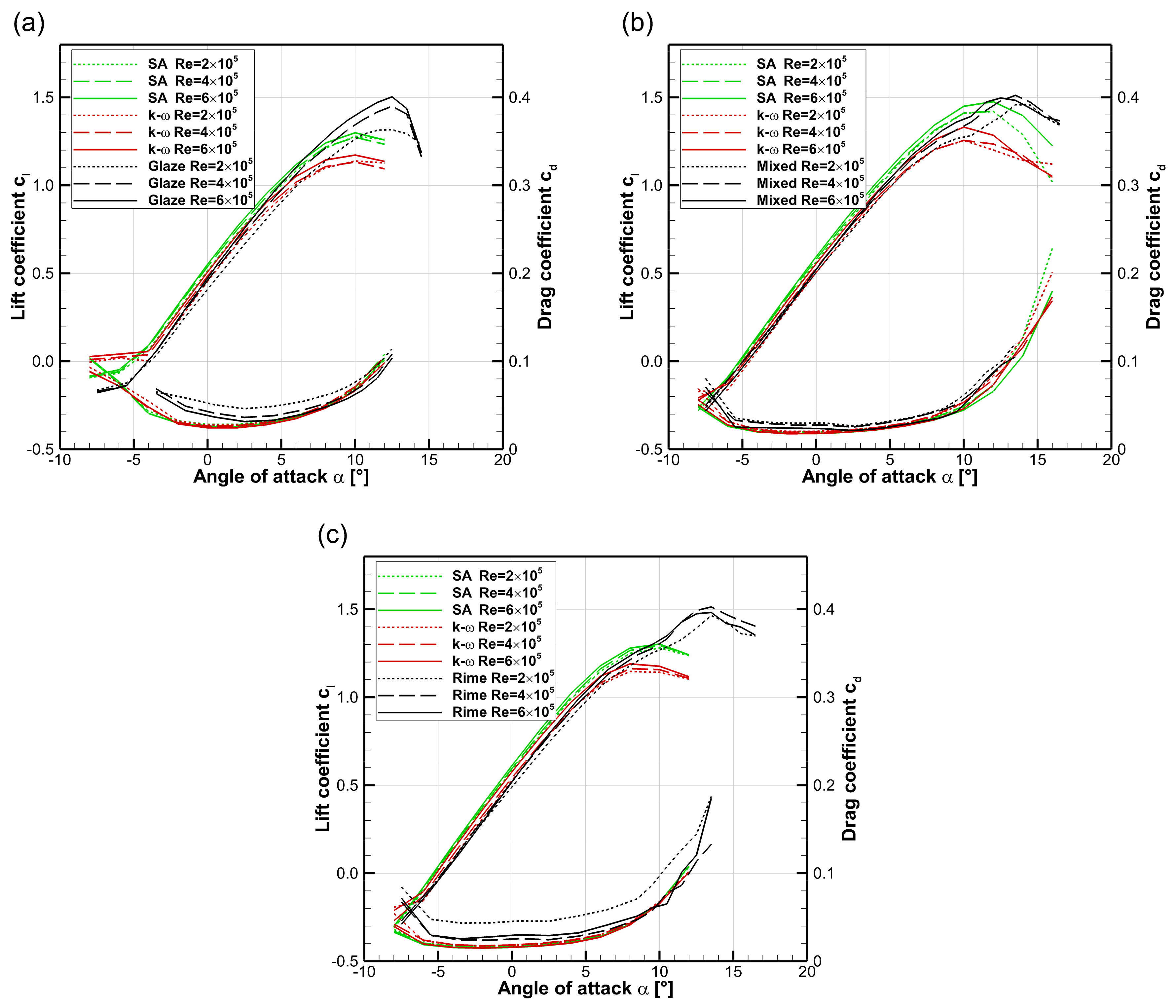
6.2. IWT Ice Shapes
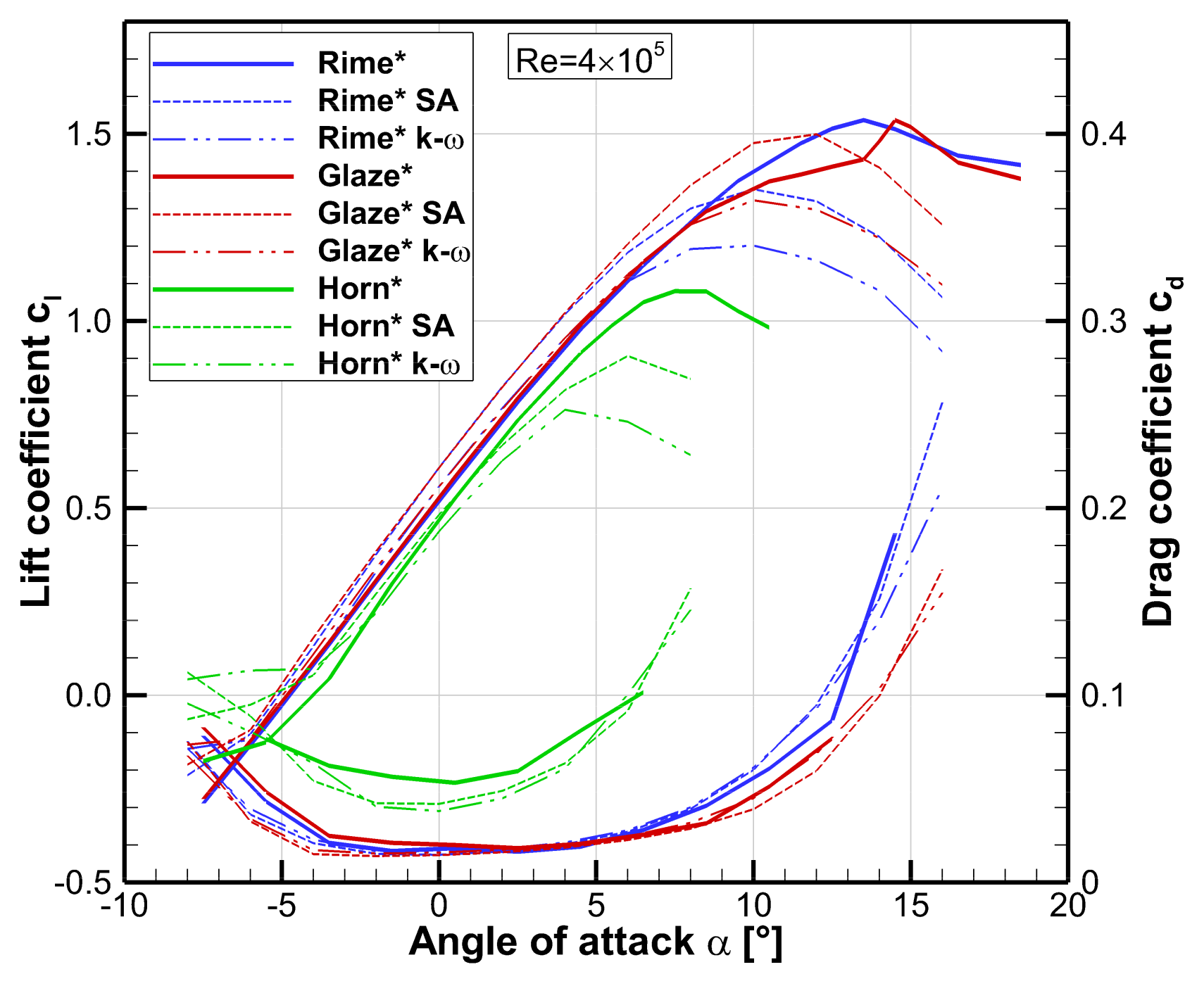
6.3. LEWICE Ice Shapes
7. Discussion
7.1. Experiments
7.2. Simulations
8. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Bragg, M.B.; Broeren, A.P.; Blumenthal, L.A. Iced-airfoil aerodynamics. Prog. Aerosp. Sci. 2005, 41, 323–362. [Google Scholar] [CrossRef]
- Gent, R.W.; Dart, N.P.; Cansdale, J.T. Aircraft icing. Philos. Trans. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 2000, 358, 2873–2911. [Google Scholar] [CrossRef]
- Leary, W.M. We Freeze to Please: A History of NASA’s Icing Research Tunnel and the Quest for Flight Safety; National Aeronautics and Space Administration: Washington, DC, USA, 2002. [Google Scholar]
- Wright, W.; Rutkowski, A. Validation Results for LEWICE 2.0; NASA Technical Report NASA/CR—1999-208690; NASA Center for Aerospace Information: Hanover, MD, USA, 1999. [Google Scholar] [CrossRef]
- Addy, H.E. Ice Accretions and Icing Effects for Modern Airfoils; Technical Publication NASA/TP--2000-210031; NASA Center for Aerospace Information: Hanover, MD, USA, 2000. [Google Scholar]
- Battisti, L. Wind Turbines in Cold Climates; Springer: Berlin/Heidelberg, Germany, 2015. [Google Scholar]
- Wallenius, T.; Lehtomäki, V. Overview of cold climate wind energy: Challenges, solutions, and future needs. Wires Energy Environ. 2016, 5, 128–135. [Google Scholar] [CrossRef]
- McTavish, S.; Feszty, D.; Nitzsche, F. Evaluating Reynolds number effects in small-scale wind turbine experiments. J. Wind Eng. Ind. Aerodyn. 2013, 120, 81–90. [Google Scholar] [CrossRef]
- Wood, D. Small Wind Turbines; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Leary, J.; Schaube, P.; Clementi, L. Rural electrification with household wind systems in remote high wind regions. Energy Sustain. Dev. 2019, 52, 154–175. [Google Scholar] [CrossRef]
- Probst, O.; Martínez, J.; Elizondo, J.; Monroy, O. Small Wind Turbine Technology. In Wind Turbines; Al-Bahadly, I., Ed.; IntechOpen: London, UK, 2011. [Google Scholar]
- Carbon Trust. Small-Scale Wind Energy Policy Insights and Practical Guidance; Report; Carbon Trust: London, UK, 2008. [Google Scholar] [CrossRef]
- Feng, F.; Li, S.; Li, Y.; Tian, W. Numerical simulation on the aerodynamic effects of blade icing on small scale Straight-bladed VAWT. Phys. Procedia 2012, 24, 774–780. [Google Scholar] [CrossRef]
- Shu, L.; Liang, J.; Hu, Q.; Jiang, X.; Ren, X.; Qiu, G. Study on small wind turbine icing and its performance. Cold Reg. Sci. Technol. 2017, 134. [Google Scholar] [CrossRef]
- Siquig, A. Impact of Icing on Unmanned Aerial Vehicle (UAV) Operations; Naval Environmental Prediction Research Facility Report; Naval Environmental Prediction Research Facility: Monterey, CA, USA, 1990. [Google Scholar]
- Williams, N.; Benmeddour, A.; Brian, G.; Ol, M. The effect of icing on small unmanned aircraft low Reynolds number airfoils. In Proceedings of the 17th Australian International Aerospace Congress (AIAC), Melbourne, Australia, 26–28 February 2017. [Google Scholar]
- Szilder, K.; Yuan, W. In-flight icing on unmanned aerial vehicle and its aerodynamic penalties. Prog. Flight Phys. 2017, 9, 173–188. [Google Scholar] [CrossRef]
- Fajt, N.; Hann, R.; Lutz, T. The Influence of Meteorological Conditions on the Icing Performance Penalties on a UAV Airfoil. In Proceedings of the 8th European Conference for Aeronautics and Space Sciences (EUCASS), Madrid, Spain, 1–4 July 2019. [Google Scholar] [CrossRef]
- Hann, R.; Johansen, T. Unsettled Topics in UAV Icing; SAE Edge Research Report; SAE International: Warrendale, PA, USA, 2020. [Google Scholar]
- O’Meara, M.M.; Mueller, T.J. Laminar Separation Bubble Characteristics on an Airfoil at Low Reynolds Numbers. AIAA J. 1987, 25, 1033–1041. [Google Scholar] [CrossRef]
- Szilder, K.; McIlwain, S. In-Flight Icing of UAVs—The Influence of Reynolds Number on the Ice Accretion Process; SAE Technical Paper 2011-01-2572; SAE International: Warrendale, PA, USA, 2011. [Google Scholar] [CrossRef]
- Seifert, H.; Richert, F. Aerodynamics of Iced Airfoils and Their Influence on Loads and Power Production. In Proceedings of the European Wind Energy Conference, Dublin, Ireland, 6–9 October 1997. [Google Scholar]
- Jasinski, W.J.; Selig, M.S.; Bragg, M.B.; Shawn, C.N. Wind Turbine Performance Under Icing Conditions. J. Sol. Energy Eng. 1998, 120, 60–65. [Google Scholar] [CrossRef]
- Etemaddar, M.; Hansen, M.O.L.; Moan, T. Wind turbine aerodynamic response under atmospheric icing conditions. Wind Energy 2014, 17, 241–265. [Google Scholar] [CrossRef]
- Hochart, C.; Fortin, G.; Perron, J.; Ilinca, A. Wind turbine performance under icing conditions. Wind Energy 2008, 11, 319–333. [Google Scholar] [CrossRef]
- Han, Y.; Palacios, J.; Schmitz, S. Scaled ice accretion experiments on a rotating wind turbine blade. J. Wind Eng. Ind. Aerodyn. 2012, 109, 55–67. [Google Scholar] [CrossRef]
- Hudecz, A.; Koss, H.; Hansen, M.O.L. Ice Accretion on Wind Turbine Blades. In Proceedings of the 15th International Workshop on Atmospheric Icing of Structures (IWAIS XV), St. John’s, NL, Canada, 8–11 September 2013. [Google Scholar]
- Gao, L.; Liu, Y.; Hu, H. An experimental investigation on the dynamic ice accretion process over the surface of a wind turbine blade model. In Proceedings of the 9th AIAA Atmospheric and Space Environments Conference, Denver, CO, USA, 5–9 June 2017; pp. 1–18. [Google Scholar] [CrossRef]
- Knobbe-Eschen, H.; Stemberg, J.; Abdellaoui, K.; Altmikus, A.; Knop, I.; Bansmer, S.; Balaresque, N.; Suhr, J. Numerical and experimental investigations of wind-turbine blade aerodynamics in the presence of ice accretion. In Proceedings of the AIAA Scitech Forum, San Diego, CA, USA, 7–11 January 2019. AIAA 2019-0805. [Google Scholar] [CrossRef]
- Hansman, R.J.; Breuer, K.S.; Reehorst, A.; Vargas, M. Close-up Analysis of Aircraft Ice Accretion. In Proceedings of the 31st Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 11–14 January 1993. [Google Scholar]
- Somers, D.M. The S825 and S826 Airfoils; Technical Report NREL/SR-500-36344; U.S. Department of Energy: Oak Ridge, TN, USA, 2005. [Google Scholar]
- Bartl, J.; Sagmo, K.F.; Bracchi, T.; Sætran, L. Performance of the NREL S826 airfoil at low to moderate Reynolds numbers—A reference experiment for CFD models. Eur. J. Mech.-B/Fluids 2019, 75, 180–192. [Google Scholar] [CrossRef]
- Tiihonen, M.; Jokela, T.; Makkonen, L.; Bluemink, G. VTT Icing Wind Tunnel 2.0. In Proceedings of the Winterwind Conference, Åre, Sweden, 8–10 February 2016. [Google Scholar]
- Hann, R.; Borup, K.; Zolich, A.; Sorensen, K.; Vestad, H.; Steinert, M.; Johansen, T. Experimental Investigations of an Icing Protection System for UAVs. In SAE Technical Papers; SAE Technical Paper 2019-01-2038; SAE International: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Shin, J.; Bond, T.H. Experimental and computational ice shapes and resulting drag increase for a NACA 0012 airfoil. In Proceedings of the 5th Symposium on Numerical and Physical Aspects of Aerodynamic Flows, Long Beach, CA, USA, 13–15 January 1992. [Google Scholar]
- Wright, W. User’s Manual for LEWICE Version 3.2; NASA/CR—2008-214255; NASA Center for Aerospace Information: Hanover, MD, USA, 2008. [Google Scholar]
- Hann, R. UAV Icing: Comparison of LEWICE and FENSAP-ICE for Ice Accretion and Performance Degradation. In Proceedings of the Atmospheric and Space Environments Conference, Atlanta, GA, USA, 25–29 June 2018. AIAA 2018-2861. [Google Scholar] [CrossRef]
- Hann, R. UAV Icing: Ice Accretion Experiments and Validation. In SAE Technical Papers; SAE Technical Paper 2019-01-2037; SAE International: Warrendale, PA, USA, 2019. [Google Scholar] [CrossRef]
- Krøgenes, J.; Brandrud, L. Aerodynamic Performance of the NREL S826 Airfoil in Icing Conditions. Master’s Thesis, NTNU, Trondheim, Norway, 2017. [Google Scholar] [CrossRef]
- Federal Aviation Administration. 14 CFR Parts 25 and 29, Appendix C, Icing Design Envelopes; DOT/FAA/AR-00/30; U.S. Department of Transportation: Washington, DC, USA, 2002.
- Barlow, J.B.; Rae, W.H.; Pope, A. Low-Speed Wind Tunnel Testing; Wiley: Hoboken, NJ, USA, 1999. [Google Scholar]
- Habashi, W.G.; Morency, F.; Beaugendre, H. A Second Generation 3D CFD-Based In-Flight Icing Simulation System. In Proceedings of the FAA In-flight Icing / Ground De-icing International Conference & Exhibition, Chicago, IL, USA; 2003. [Google Scholar] [CrossRef]
- Reid, T.; Baruzzi, G.; Ozcer, I.; Switchenko, D.; Habashi, W.G. FENSAP-ICE Simulation of icing on wind turbine blades, part 1: Performance degradation. In Proceedings of the 51st AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Grapevine, TX, USA, 7–10 January 2013. AIAA 2013-0750. [Google Scholar]
- Steinbrenner, J.P. Construction of prism and hex layers from anisotropic tetrahedra. In Proceedings of the 22nd AIAA Computational Fluid Dynamics Conference, Dallas, TX, USA, 22–26 June 2015. [Google Scholar] [CrossRef]
- ANSYS. ANSYS FENSAP-ICE User Manual 18.2; ANSYS: Canonsburg, PA, USA, 2017. [Google Scholar]
- Blazek, J. Computational Fluid Dynamics: Principles and Applications; Butterworth-Heinemann: Oxford, UK, 2015. [Google Scholar]
- Roache, P.J. Quantification of Uncertainty in Computational Fluid Dynamics. Annu. Rev. Fluid Mech. 1997, 29, 123–160. [Google Scholar] [CrossRef]
- Sagmo, K.; Bartl, J.; Sætran, L. Numerical simulations of the NREL S826 airfoil. J. Phys. Conf. Ser. 2016, 753. [Google Scholar] [CrossRef]
- Ericsson, L.E.; Reding, J.P. Unsteady Airfoil Stall; NASA Report CR-66787; NASA Center for Aerospace Information: Hanover, MD, USA, 1969. [Google Scholar]
- Lissaman, P.B.S. Low-Reynolds-number airfoils. Annu. Rev. Fluid Mech. 1983, 15, 223–239. [Google Scholar] [CrossRef]
- Broeren, A.P.; Bragg, M.B.; Addy, H.E. Effect of intercycle ice accretions on airfoil performance. J. Aircr. 2004, 41, 165–174. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Re × 106 | Airfoil | Chord | Icing Cases | Comments |
|---|---|---|---|---|---|
| Seifert & Richert, 1997 [22] | 0.6 | NACA4415 | 0.225 m | 4 | Unknown icing conditions. Ice shapes from fragments found near wind turbine. |
| Jasinski et al., 1998 [23] | 1.0–2.0 | S809 | 0.457 m | 4 | Ice accretion from LEWICE. |
| Hochart et al., 2008 [25] | 0.3–0.7 | NACA63-415 | 0.200 m | 6 | Performance data only at a single AOA. |
| Han et al., 2012 [26] | 1.0–1.4 | S809 | 0.267 m | 17 | No performance data included in study. |
| Etemaddar et al., 2012 [24] | 2.0 | NACA64-618 | 1.000 m | 2 | Ice accretion from LEWICE. |
| Hudecz et al., 2013 [27] | 1.0 | NACA64-618 | 0.900 m | 3 | Performance data only at a single AOA. |
| Gao et al., 2017 [28] | 0.5 | DU96-W-180 | 0.152 m | 6 | No performance data included in study. |
| Williams et al., 2017 [16] | 0.2 | RG-15 | 0.210 m | 4 | Low Reynolds number. Performance data from water and wind tunnel experiments. |
| Knobbe-Eschen et al., 2019 [29] | 2.3 | AH94W-145 | 0.750 m | 2 | High Reynolds number. |
| This study | 0.4–0.8 | S826 | 0.450 m | 6 | Ice shapes from IWT and LEWICE. Geometries and performance data shared. |
| Parameter | Icing Wind Tunnel (IWT) | LEWICE | |||||
|---|---|---|---|---|---|---|---|
| Glaze | Mixed | Rime | Glaze* | Horn* | Rime* | ||
| Source | Experiment | Simulation | |||||
| v∞ | 25 m/s | 25 m/s | 40 m/s | 25 m/s | |||
| T∞ | −2 °C | −5 °C | −10 °C | −2 °C | −4 °C | −10 °C | |
| MVD | 26 μm | 30 μm | 20 μm | 20 μm | |||
| LWC | 0.44 g/m³ | 0.34 g/m³ | 0.55 g/m³ | 0.43 g/m³ | |||
| ticing | 20 min | 40 min | |||||
| αicing | 0° | ||||||
| c | 0.450 m | ||||||
| ks | 1.0 mm | 0.9 mm | 0.7 mm | 1.0 mm | 1.0 mm | 1.0 mm | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hann, R.; Hearst, R.J.; Sætran, L.R.; Bracchi, T. Experimental and Numerical Icing Penalties of an S826 Airfoil at Low Reynolds Numbers. Aerospace 2020, 7, 46. https://doi.org/10.3390/aerospace7040046
Hann R, Hearst RJ, Sætran LR, Bracchi T. Experimental and Numerical Icing Penalties of an S826 Airfoil at Low Reynolds Numbers. Aerospace. 2020; 7(4):46. https://doi.org/10.3390/aerospace7040046
Chicago/Turabian StyleHann, Richard, R. Jason Hearst, Lars Roar Sætran, and Tania Bracchi. 2020. "Experimental and Numerical Icing Penalties of an S826 Airfoil at Low Reynolds Numbers" Aerospace 7, no. 4: 46. https://doi.org/10.3390/aerospace7040046
APA StyleHann, R., Hearst, R. J., Sætran, L. R., & Bracchi, T. (2020). Experimental and Numerical Icing Penalties of an S826 Airfoil at Low Reynolds Numbers. Aerospace, 7(4), 46. https://doi.org/10.3390/aerospace7040046