
Technology Roadmap Methodology and Tool Upgrades to Support Strategic Decision in Space Exploration




Abstract
1. Introduction
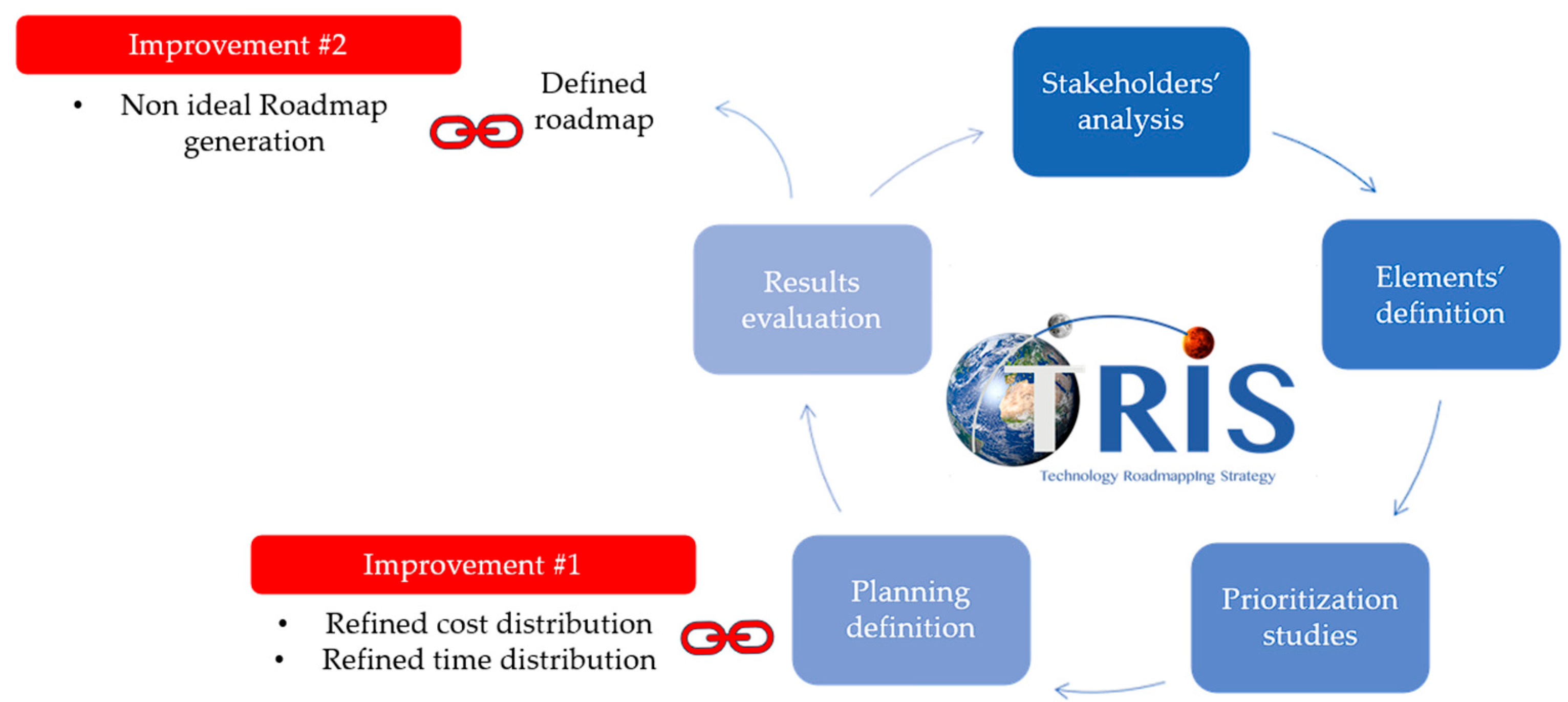
- Improved Cost and Time Distribution: Time and budget resource estimation has been improved to better suit space exploration with a focus on the evolving scenario of lunar exploration; see Section 3.1 and Section 3.2.
- Non-Ideal Roadmaps Generation: Development of alternative technology roadmaps to be followed in cases of constrained situations, taking into account both time and financial limitations; see Section 3.3.
2. Technology Roadmap Methodology
2.1. Technology Roadmapping Background
- Operational Capabilities (OCs): High-level functions responding to a mission statement.
- Technologies: defined as “the technical know-how that is required for the design, manufacture and test of a space product, including all related processes” [33]. A set of technologies within a specific technical area constitutes a Technology Domain (TD), such as Propulsion, Structures and Mechanisms, or Thermal.
- Building Blocks (BBs): Physical elements that combine several technologies to achieve specific functions (OCs), such as a technology flight demonstrator.
- Mission Concepts (MCs) or Activities (ACs): A series of research, development, and testing activities, demonstrative missions, intended to increase the readiness level of each technology, or BB, such as wind tunnel tests (AC) or flight missions carried out by a demonstrator (MC).
2.2. TRIS Limitation and Proposed Modification
3. Technology Roadmap Improvements
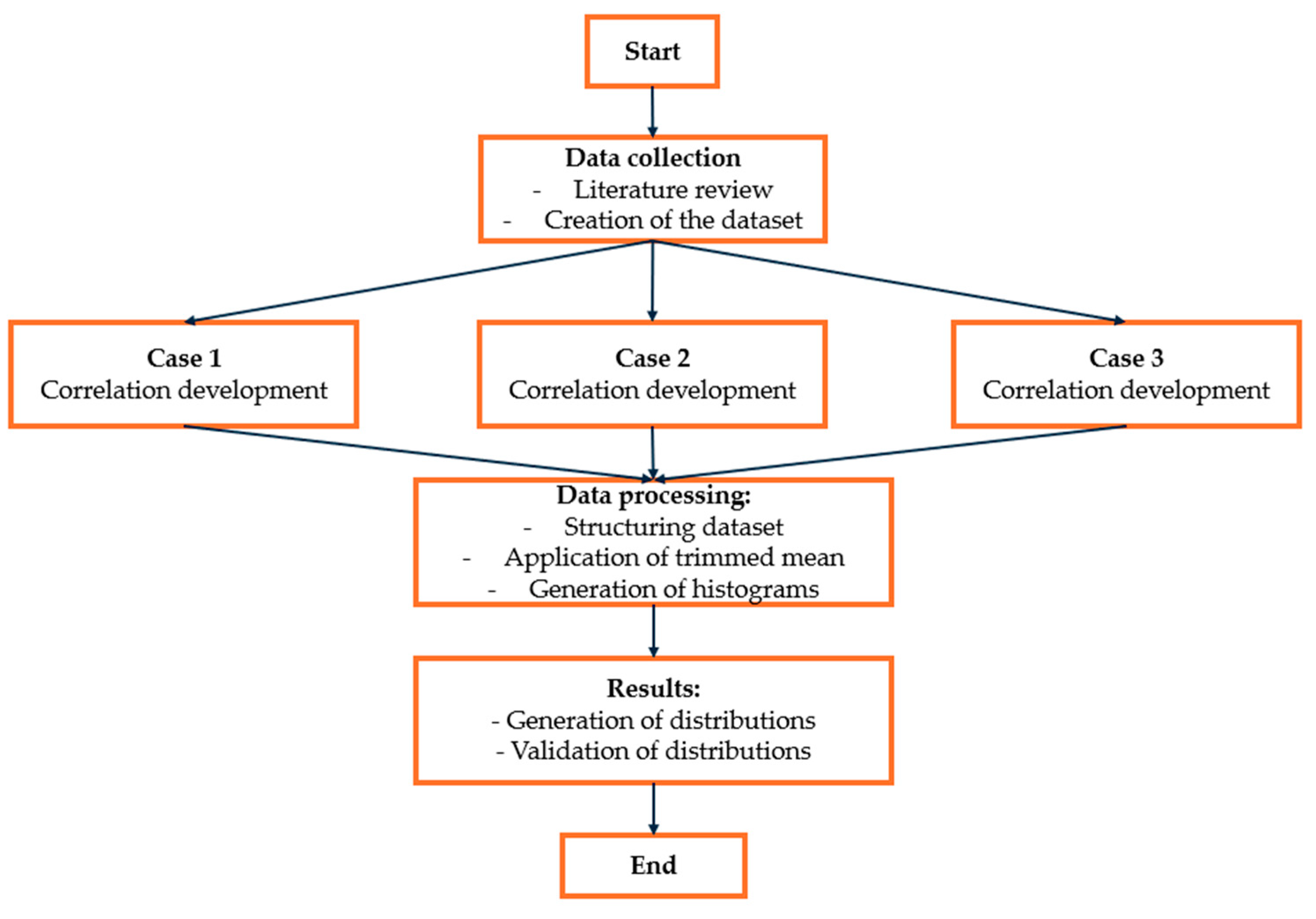
3.1. Cost and Time Distribution
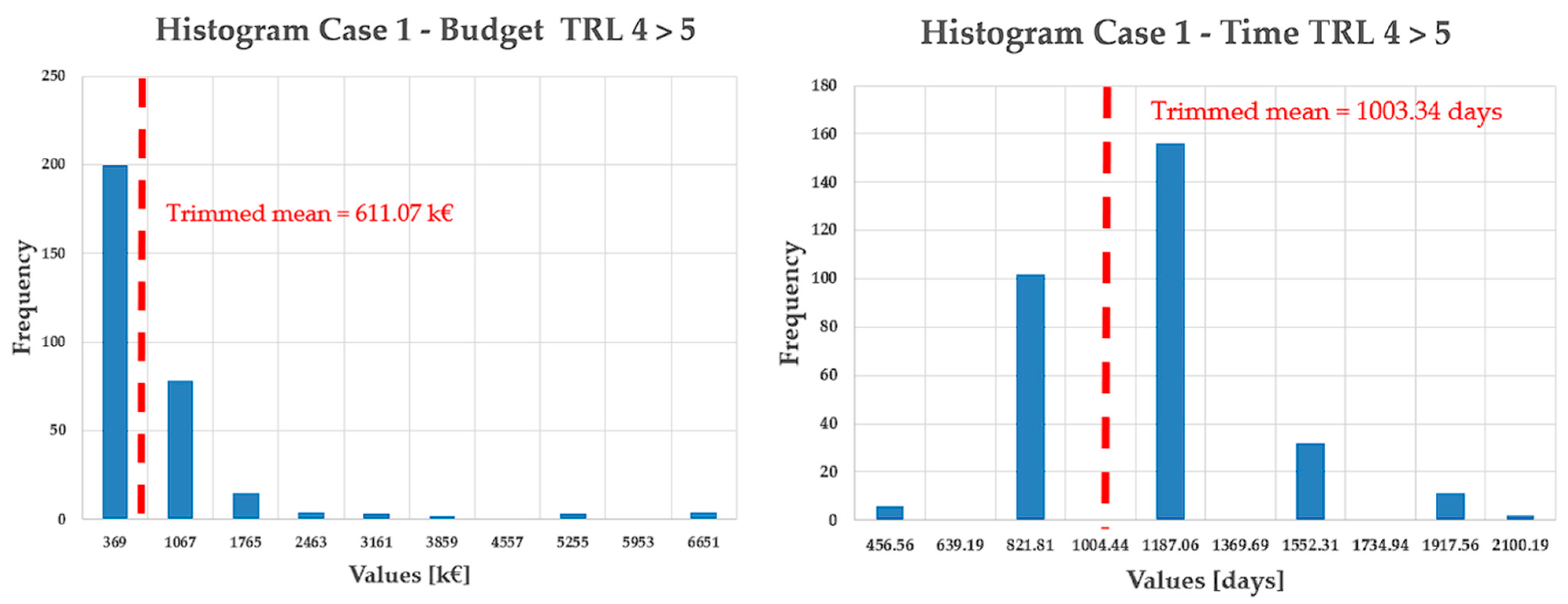
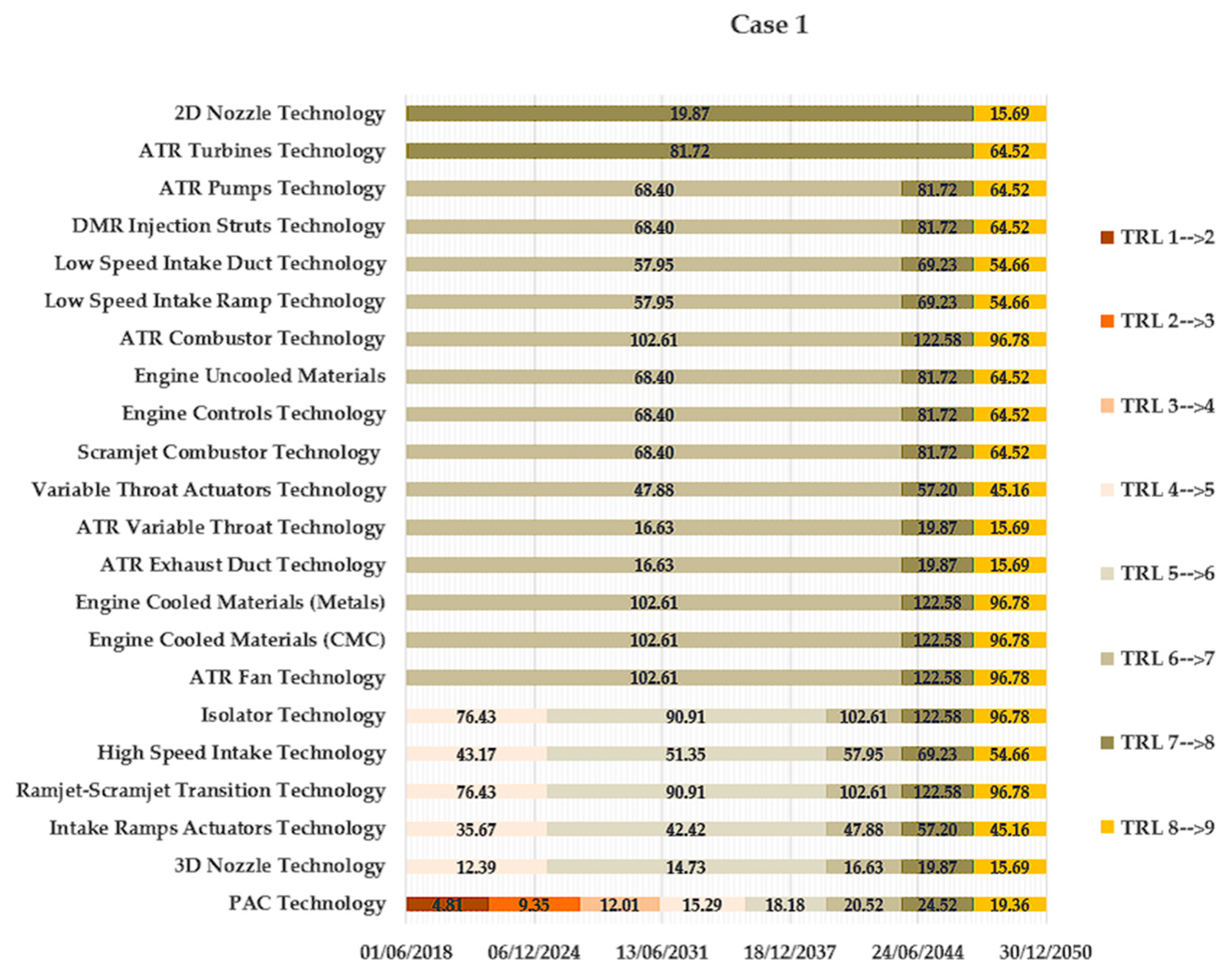
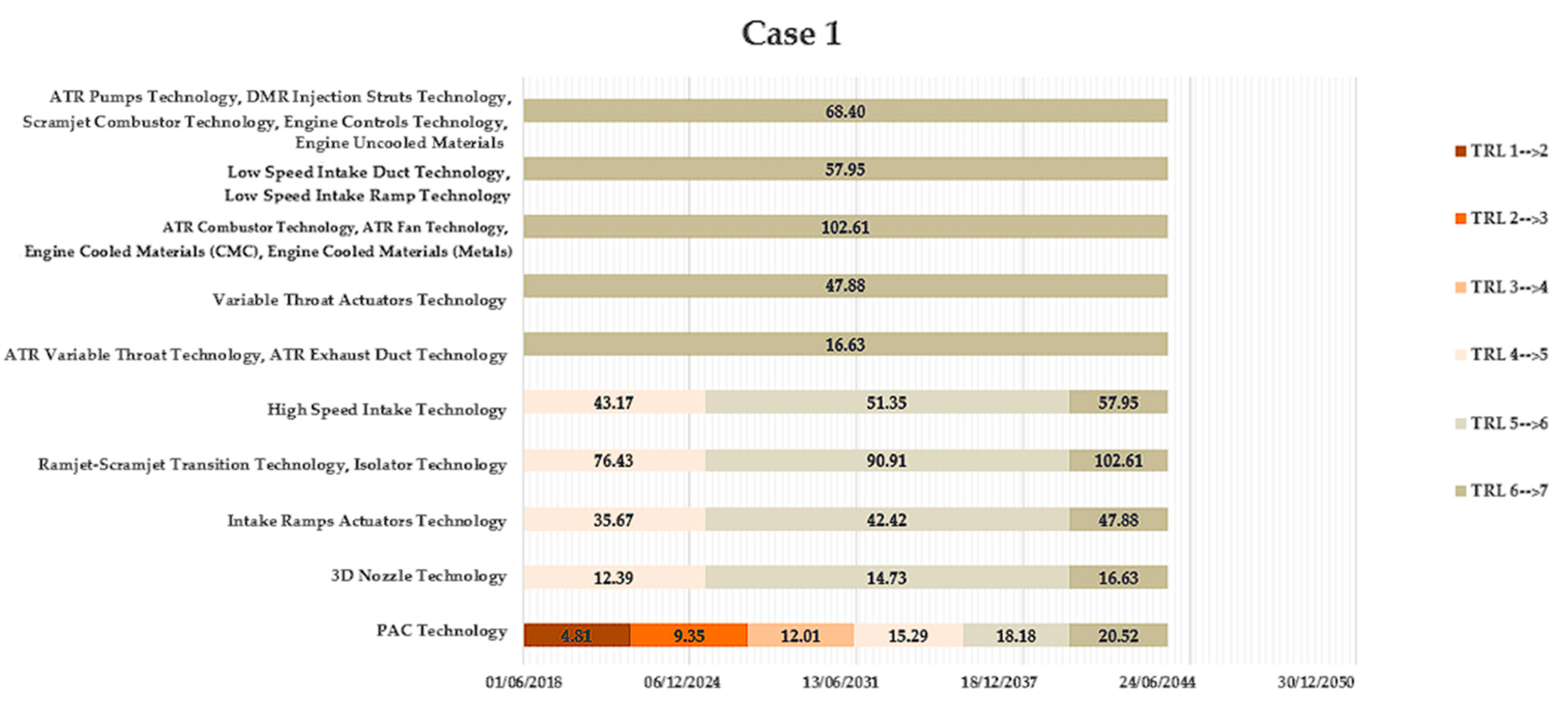
- Case 1: Focused only on single-unit TRL transitions. This approach examined how costs and time are distributed when transitioning from one TRL to the next, providing a basic understanding of resource allocation for individual transitions. For example, a generic technology transitioning from TRL 4 to TRL 5 required a budget of 611.07 k EUR and 1003.34 days (note that these values correspond to the trimmed values detailed in Figure 3).
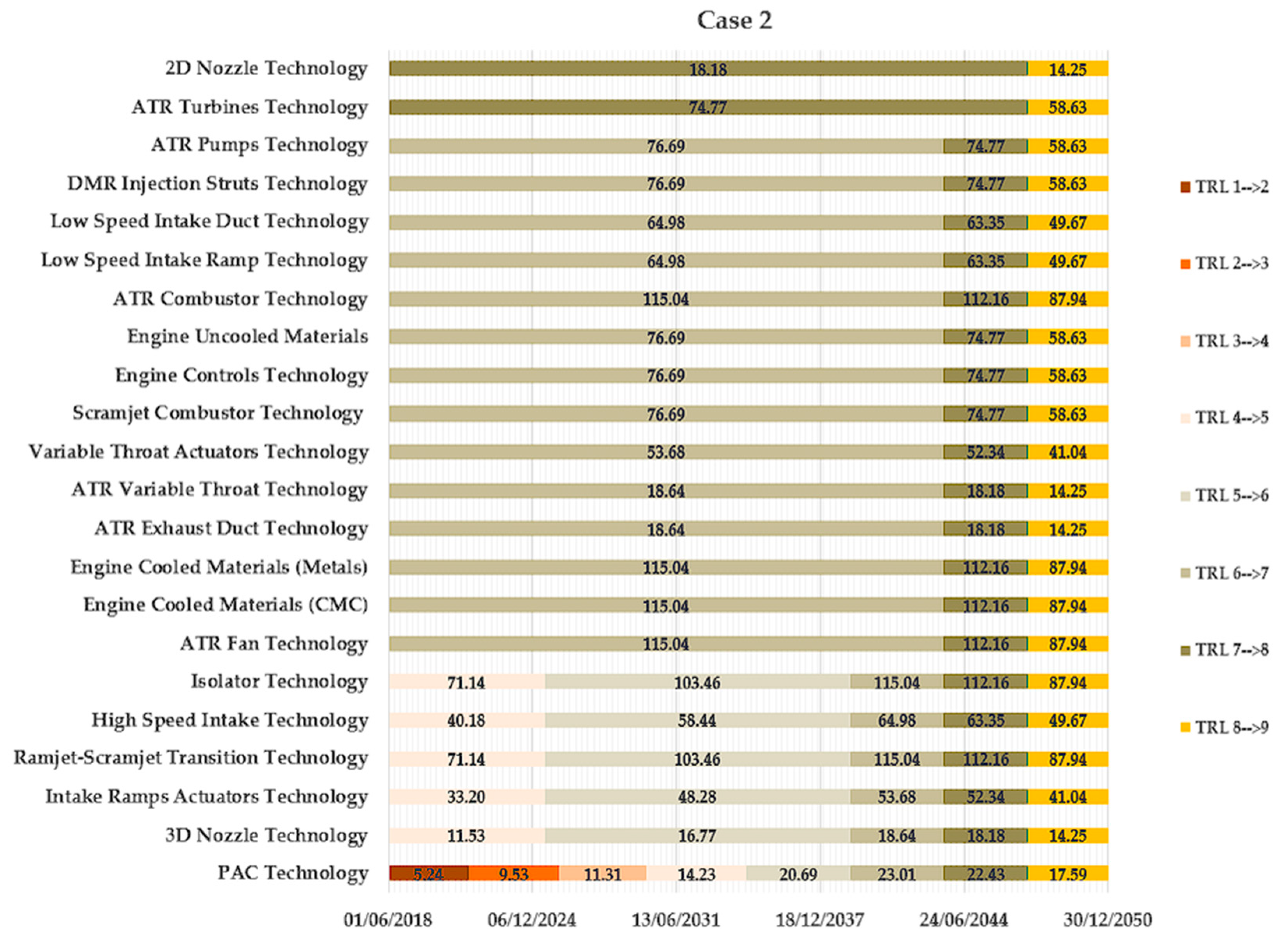
- Case 2: Prior distribution [18,52] has been used to re-distribute cost and time across non-unitary TRL transitions. As already mentioned, this approach allows increasing the dataset injecting data resulting from splitting non-unitary TRL transition into multiple unitary TRL transitions. For instance, a generic technology transitioning from TRL 2 to TRL 4 with a budget of 200 k EUR and 730 days was split into two transitions. The transition from TRL 2 to TRL 3 was allocated 90 k EUR and 446 days, while the transition from TRL 3 to TRL 4 received 111 k EUR and 284 days, based on the distribution in Refs. [18,52].
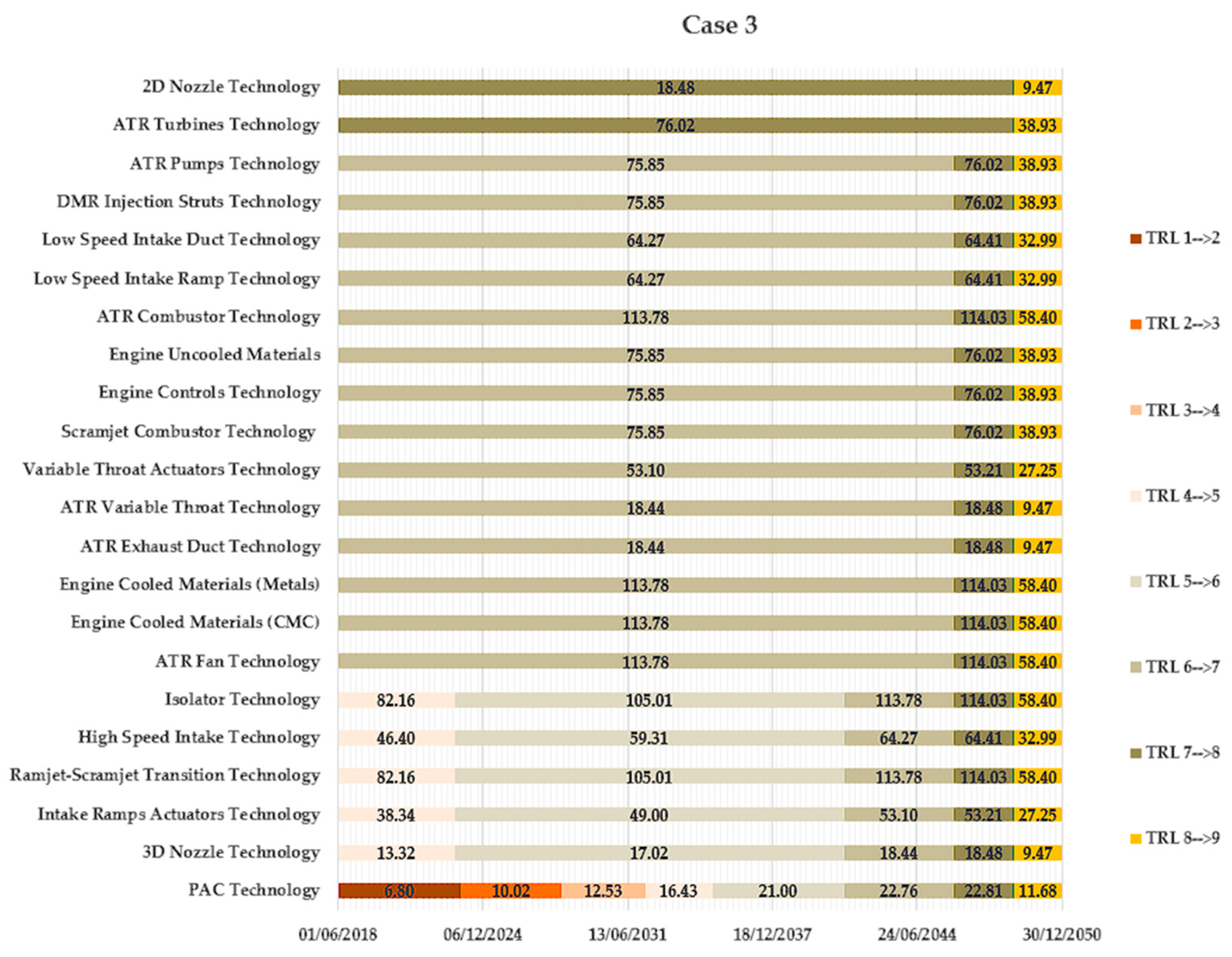
- Case 3: The unitary distribution (from Case 1) has been used to distribute cost and time across non-unitary TRL transitions (in the same way as Case 2).
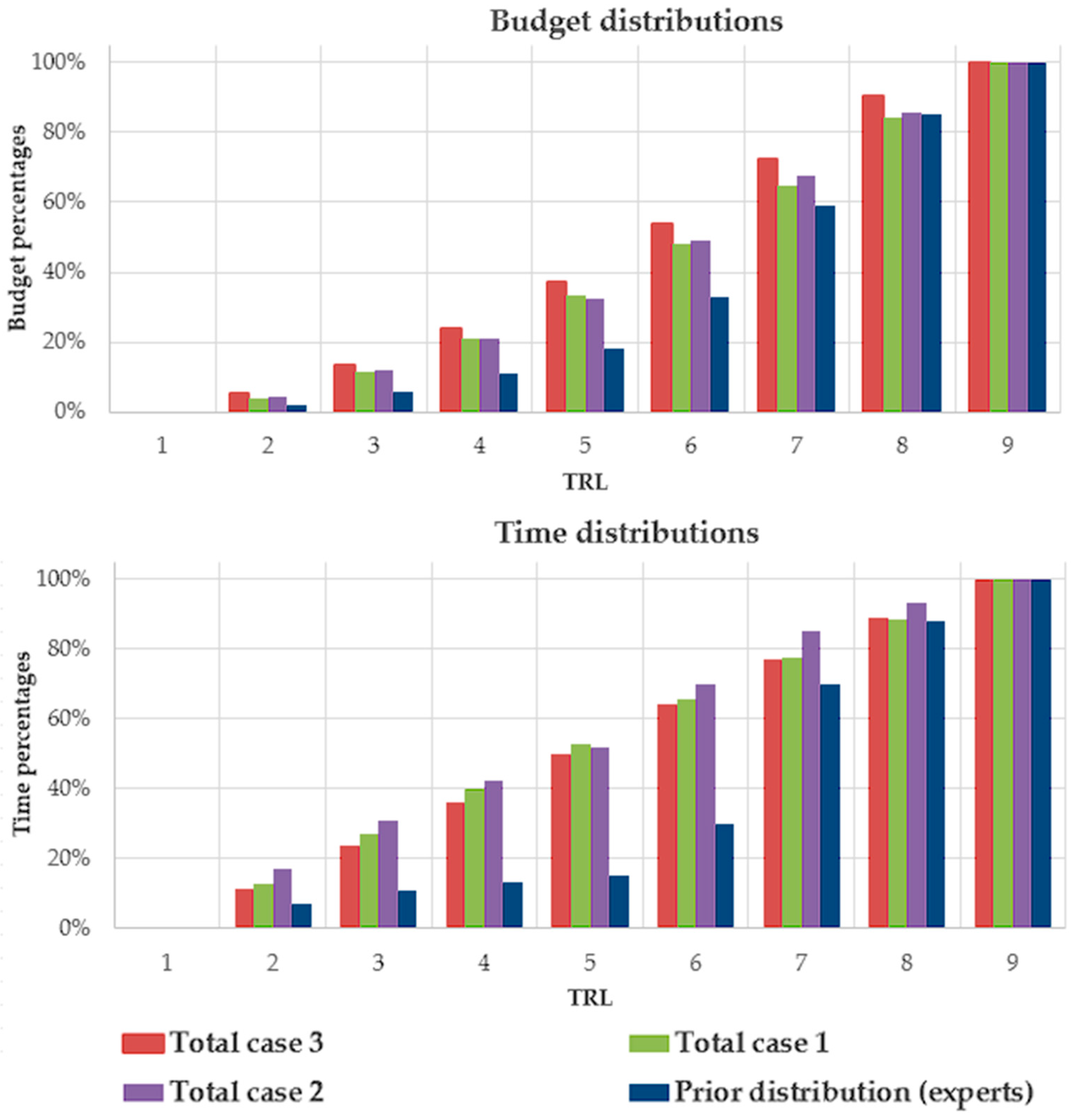
3.2. Distribution Validation
3.3. Post-Results Evaluation
4. Case Study
STRATOFLY
5. Conclusions
- Refinement of Algorithms: Continued refinement and testing of the algorithms, including AI ones, could improve their performance and applicability to a broader range of aerospace mission scenarios.
- Integration with Additional Systems: Exploring the integration of the toolset with other aerospace systems and tools could provide additional insights and enhance its utility across various stages of mission planning and execution.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| AC | Activity |
| BB | Building Block |
| CaC | Cost at Completion |
| OC | Operational Capability |
| MC | Mission Concept |
| MCTS | Monte Carlo Tree Search |
| MDP | Markov Decision Process |
| TA | Technology Area |
| TRIS | Technology Roadmapping Strategy |
| TRL | Technology Readiness Level |
References
- Corrado, L.; Cropper, M.; Rao, A. Space exploration and economic growth: New issues and horizons. Proc. Natl. Acad. Sci. USA 2023, 120, e2221341120. [Google Scholar] [CrossRef] [PubMed]
- Available online: https://www.oecd.org/en/topics/policy-issues/space-economy.html (accessed on 10 June 2025).
- McKinsey & Company. Space: The $1.8 Trillion Opportunity for Global Economic Growth, Insight Report. 2024. Available online: https://www.mckinsey.com/industries/aerospace-and-defense/our-insights/space-the-1-point-8-trillion-dollar-opportunity-for-global-economic-growth (accessed on 10 June 2025).
- MacDonald, A.C. The Long Space Age: The Economic Origins of Space Exploration from Colonial America to the Cold War; Yale University Press: New Haven, CT, USA, 2017. [Google Scholar]
- The World Bank. Poverty and Shared Prosperity 2022: Correcting Course. 2022. Available online: https://www.worldbank.org/en/publication/poverty-and-shared-prosperity (accessed on 10 June 2025).
- Moore, F.C.; Diaz, D.B. Temperature impacts on economic growth warrant stringent mitigation policy. Nat. Clim. Change 2015, 5, 127–131. [Google Scholar] [CrossRef]
- Coronese, M.; Lamperti, F.; Keller, K.; Chiaromonte, F.; Roventini, A. Evidence for sharp increase in the economic damages of extreme natural disasters. Proc. Natl. Acad. Sci. USA 2019, 116, 21450–21455. [Google Scholar] [CrossRef] [PubMed]
- Ginn, W. Climate disasters and the macroeconomy: Does state-dependence matter? Evidence for the US. Econ. Disaster Clim. Change 2022, 6, 141–161. [Google Scholar] [CrossRef]
- ISECG. The Global Exploration Roadmap. 2018. Available online: https://www.globalspaceexploration.org/?page_id=1371 (accessed on 10 June 2025).
- ESA. Terrae Novae 2030+ Strategy Roadmap. 2022. Available online: https://destination-orbite.net/documentations/Terrae_Novae_2030+strategy_roadmap.pdf (accessed on 10 June 2025).
- Carvalho, M.; Fleury, A.; Lopes, A. An overview of the literature on technology roadmapping (TRM): Contributions and trends. Technol. Forecast. Soc. Change 2013, 80, 1418–1437. [Google Scholar] [CrossRef]
- Abe, H. The Innovation Support Technology (IST) Approach: Integrating Business Modeling and Roadmapping Methods. In Technology Roadmapping for Strategy and Innovation; Moehrle, M., Isenmann, R., Phaal, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 173–188. [Google Scholar]
- Geschka, H.; Hahnenwald, H. Scenario-Based Exploratory Technology Roadmaps—A Method for the Exploration of Technical Trends. In Technology Roadmapping for Strategy and Innovation; Moehrle, M., Isenmann, R., Phaal, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 123–136. [Google Scholar]
- Kanama, D. Development of Technology Foresight: Integration of Technology Roadmapping and the Delphi Method. In Technology Roadmapping for Strategy and Innovation; Moehrle, M., Isenmann, R., Phaal, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 151–171. [Google Scholar]
- Moehrle, M. TRIZ-based technology roadmapping. In Technology Roadmapping for Strategy and Innovation. Charting Route to Success; Moehrle, M., Isenmann, R., Phaal, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 137–150. [Google Scholar]
- Phaal, R.; Farrukh, C.; Probert, D. Fast-Start Roadmapping Workshop Approaches. In Technology Roadmapping for Strategy and Innovation; Moehrle, M., Isenmann, R., Phaal, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; pp. 91–106. [Google Scholar]
- Knoll, D.; Golkar, A.; De Weck, O. A concurrent design approach for model-based technology roadmapping. In Proceedings of the 12th Annual IEEE International Systems Conference, SysCon 2018—Proceedings, Vancouver, BC, Canada, 23–26 April 2018; pp. 1–6. [Google Scholar]
- Viola, N.; Fusaro, R.; Vercella, V. Technology Roadmapping Methodology for Future Hypersonic Transportation Systems. Acta Astronaut. 2022, 195, 430–444. [Google Scholar] [CrossRef]
- Viola, N.; Fusaro, R.; Vercella, V.; Saccoccia, G. Technology RoadmappIng Strategy, TRIS: Methodology and tool for technology roadmaps for hypersonic and re-entry space transportation systems. Acta Astronaut. 2020, 170, 609–622. [Google Scholar] [CrossRef]
- Narducci, G.; Governale, G.; Viola, N.; Rimani, J.; Fusaro, R.; Ferretto, D.; Chiusano, S.; Fiori, A. Microlauncher design, cost estimation and technology roadmaps. In Proceedings of the 2nd International Conference on Flight Vehicles, Aerothermodynamics and Re-entry Missions Engineering, Heilbronn, Germany, 19–23 June 2022. [Google Scholar]
- Governale, G.; Rimani, J.; Narducci, G.; Viola, N.; Fusaro, R. Rapid prototyping for Martian space systems. In Proceedings of the Moving to Mars: 2022 International Workshop on Technology Development for Mars Human Exploration, Montreal, QC, Canada, 17–18 November 2022. [Google Scholar]
- Aleina, S.C.; Viola, N.; Fusaro, R.; Saccoccia, G. Approach to technology prioritization in support of moon initiatives in the framework of ESA exploration technology roadmaps. Acta Astronaut. 2017, 139, 42–53. [Google Scholar] [CrossRef]
- Aleina, S.C.; Fusaro, R.; Viola, N.; Longo, J.; Saccoccia, G. Technology roadmaps derivation methodology for European hypersonic and re-entry space transportation systems. In Proceedings of the 21st AIAA International Space Planes and Hypersonics Technologies Conference Hypersonics, Xiamen, China, 6–9 March 2017; pp. 1–16. [Google Scholar] [CrossRef]
- Aleina, S.C.; Viola, N.; Fusaro, R.; Longo, J.; Saccoccia, G. Basis for a methodology for roadmaps generation for hypersonic and re-entry space transportation systems. Technol. Forecast. Soc. Change 2018, 128, 208–225. [Google Scholar] [CrossRef]
- Viola, N.; Alenia, S.C.; Fusaro, R.; Vercella, V.; Saccoccia, G. Space systems engineering tools for technology roadmapping activities: TrIS, technology roadmapping strategy, and HyDat, database on hypersonic transportation systems. In Proceedings of the International Astronautical Congress (IAC), Bremen, Germany, 1–5 October 2018. [Google Scholar]
- Alenia, S.C.; Fusaro, R.; Viola, N.; Rimani, J.; Longo, J.; Saccoccia, G. Comprehensive methodology for technology roadmaps generation and update for the European Hypersonic and Re-entry space transportation scenario. In Proceedings of the 68th International Astronautical Congress (IAC), Adelaide, Australia, 25–29 September 2017. [Google Scholar]
- Viola, N.; Alenia, S.C.; Fusaro, R.; Saccoccia, G.; Longo, G. Technology roadmaps preparation for European hypersonic and re-entry space transportation systems. In Proceedings of the 67th International Astronautical Congress 2016—IAC 2016, Guadalajara, Mexico, 26–30 September 2016. [Google Scholar]
- Narducci, G.; Fusaro, R.; Rimani, J.; Viola, N.; Grizzaffi, L.; Sindoni, E. Definition of Architectures & Technologies for Sustainable Human Exploration of the Moon. In Proceedings of the International Astronautical Congress (IAC), Baku, Azerbaijan, 5 October 2023. [Google Scholar]
- Narducci, G.; Viola, N.; Fusaro, R.; Governale, G.; Rimani, J.; Ferretto, D. iDREAM: A multidisciplinary methodology and integrated toolset for flight vehicle engineering. In Proceedings of the 3rd International Congress of PhD Students in Aerospace Science and Engineering, Bertinoro, Italy, 16–19 April 2023. [Google Scholar]
- Fusaro, R.; Viola, N.; Narducci, G.; Governale, G.; Rimani, J.; Ferretto, D.; Chiusano, S.; Fiori, A. iDREAM: A multidisciplinary methodology and integrated toolset for flight vehicle engineering. In Proceedings of the 73rd International Astronautical Congress, Paris, France, 18–22 September 2022. [Google Scholar]
- Fusaro, R.; Aleina, S.; Viola, N.; Longo, J.; Saccoccia, G. Database on hypersonic transportation systems: A versatile support for the technology roadmap generation and conceptual design activities. In Proceedings of the 21st AIAA International Space Planes and Hypersonics Technologies Conference, Hypersonics 2017, Xiamen, China, 6–9 March 2017. [Google Scholar]
- Viscio, M.; Viola, N.; Fusaro, R.; Basso, V. Methodology for requirements definition of complex space missions and systems. Acta Astronaut. 2015, 114, 79–92. [Google Scholar] [CrossRef]
- ESA. ESA Technology Tree version 4.1; ESA Communicatio-ESTEC: Noordwijk, The Netherlands, 2023. [Google Scholar]
- Aleina, S.C.; Viola, N.; Fusaro, R.; Saccoccia, G.; Vercella, V. Using the ESA exploration technology roadmaps in support of new mission concepts and technology prioritization. Acta Astronaut. 2019, 154, 170–176. [Google Scholar] [CrossRef]
- Aleina, S.C.; Viola, N.; Fusaro, R.; Saccoccia, G. Effective methodology to derive strategic decisions from ESA exploration technology roadmaps. Acta Astronaut. 2016, 126, 316–324. [Google Scholar] [CrossRef]
- Aleina, S.C.; Levrino, L.; Viola, N.; Fusaro, R.; Saccoccia, G. The importance of technology roadmaps for a successful future in space exploration. In Proceedings of the 9th IAA Symposium on the Future of Space Exploration, Torino, Italy, 7–9 July 2015. [Google Scholar]
- INCOSE. Systems Engineering Handbook: A Guide for System Life Cycle Processes and Activities, 4th ed.; Wiley: Hoboken, NJ, USA, 2015. [Google Scholar]
- Fusaro, R.; Viola, N.; Fenoglio, F.; Santoro, F. Conceptual design of a crewed reusable space transportation system aimed at parabolic flights: Stakeholder analysis, mission concept selection, and spacecraft architecture definition. CEAS Space J. 2017, 9, 5–34. [Google Scholar] [CrossRef]
- Larson, W.J. Human Space Flight: Mission Analysis and Design; McGraw-Hill College: New York, NY, USA, 1999. [Google Scholar]
- Hovland, I. Successful Communication: A Toolkit for Researcher and Civil Society Organizations, 2nd ed.; Overseas Development Institute: London, UK, 2014; pp. 250–263. [Google Scholar]
- ESA-ESTEC. ESA Generic Product Tree. 2011. Available online: https://esastar-emr.sso.esa.int/Account/DownloadCompetencesFile?fileType=P (accessed on 10 June 2025).
- Shishko, R. NASA Systems Engineering Handbook; NASA: Washington, DC, USA, 2007.
- Sacher, P. The Engineering Design of Engine/Airframe Integration for the Sänger Fully Reusable Space Transportation System. High Speed Propuls. Engine Des, Integr. Therm. Manag. RTO-EN-AVT. 2010, pp. 16-1–16-32. Available online: https://apps.dtic.mil/sti/tr/pdf/ADA592434.pdf (accessed on 10 June 2025).
- Bowcutt, K. Hypersonic Technology Status and Development Roadmap. Presentation to AIAA HyTASP Program Committee. 2003. Available online: https://engineering.purdue.edu/~aae519/hypersonics-news/TFAB HyTASP-dec03.pdf (accessed on 28 July 2025).
- ESA. Exploration Technology Compendium for 2021: European Exploration Envelope Programme (E3P); ESA: January 2022. Available online: https://esamultimedia.esa.int/docs/business_with_esa/Exploration_Technology_Compendium_2021_public.pdf (accessed on 10 June 2025).
- ESA-ESTEC. GSTP Element 1 “Develop” Compendium 2019: Advanced Manufacturing; ESA-ESTEC: Noordwijk, The Netherlands, 2019. [Google Scholar]
- ESA-ESTEC. GSTP Element 1 “Develop” Compendium 2019: Artificial Intelligence; ESA-ESTEC: Noordwijk, The Netherlands, 2019. [Google Scholar]
- ESA-ESTEC. GSTP Element 1 “Develop” Compendium 2019: Cybersecurity; ESA-ESTEC: Noordwijk, The Netherlands, 2019. [Google Scholar]
- ESA-ESTEC. GSTP Element 1 “Develop” Compendium 2019: Generic Technologies; ESA-ESTEC: Noordwijk, The Netherlands, 2019. [Google Scholar]
- ESA-ESTEC. GSTP Element 1 “Develop” Compendium 2019: Operations Innovation; ESA-ESTEC: Noordwijk, The Netherlands, 2019. [Google Scholar]
- ESA. Science Programme Technology Development Plan: Programme of Work for 2025, 2026 and 2027, and Related Procurement Plan; ESA: Noordwijk, The Netherlands, 2025; Available online: https://sci.esa.int/web/sci-ft/-/47731-european-space-agency-science-programme-technology-development-plan-programme-of-work (accessed on 28 July 2025).
- Vercella, V. Cost-Effective and Sustainable Scenarios for Future Reusable Space Transportation and Re-Entry Systems. Ph.D. Thesis, Politecnico di Torino, Turin, Italy, 2023. [Google Scholar]
- Mankins, J.C. Technology Readiness Level—A White Paper; NASA: Washington, DC, USA, 1995.
- Mankins, J.C. Technology readiness assessments: A retrospective. Acta Astronaut. 2009, 65, 1216–1223. [Google Scholar] [CrossRef]
- Mankins, J.C. Technology readiness and risk assessments: A new approach. Acta Astronaut. 2009, 65, 1208–1215. [Google Scholar] [CrossRef]
- Świechowski, M.; Godlewski, K.; Sawicki, B.; Mańdziuk, J. Monte Carlo Tree Search: A review of recent modifications and applications. Artif. Intell. Rev. 2023, 56, 2497–2562. [Google Scholar] [CrossRef]
- Shen, Y.; Chen, J.; Huang, P.-S.; Guo, Y.; Gao, J. M-Walk: Learning to Walk over Graphs using Monte Carlo Tree Search. In Proceedings of the 32nd Conference on Neural Information Processing Systems (NeurIPS 2018), Montréal, Canada, 2–8 December 2018. [Google Scholar]
- Wang, Y.; Sun, M.; Wang, H.; Sun, Y. Research on Knowledge Graph Completion Model Combining Temporal Convolutional Network and Monte Carlo Tree Search. Math. Probl. Eng. 2022, 2022, 2290540. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Budget Requested to Achieve the Target TRL as Percentage of the Overall Cost at Completion | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| TRL | Totall | AOCS | Avionics | EPS | Other | Propulsion | Structure | TCS | |
| Case 1 | 2 | 3.9% | 5.6% | 6.1% | 4.5% | 14.7% | 9.6% | 3.6% | 3.3% |
| 3 | 7.5% | 6.5% | 10.9% | 8.9% | 7.9% | 6.7% | 7.8% | 5.2% | |
| 4 | 9.7% | 8.9% | 13.5% | 11.4% | 9.4% | 7.4% | 12.3% | 7.7% | |
| 5 | 12.3% | 16.4% | 16.5% | 13.4% | 8.3% | 10.7% | 9.8% | 10.3% | |
| 6 | 14.7% | 16.5% | 15.7% | 9.7% | 12.4% | 18.2% | 13.1% | 15.6% | |
| 7 | 16.5% | 16.4% | 21.4% | 10.6% | 15.1% | 16.8% | 16.0% | 21.1% | |
| 8 | 19.8% | 11.1% | 8.6% | 23.2% | 18.0% | 17.1% | 20.9% | 20.6% | |
| 9 | 15.6% | 18.5% | 7.2% | 18.3% | 14.2% | 13.5% | 16.5% | 16.3% | |
| Case 2 | 2 | 4.2% | 4.8% | 4.4% | 2.9% | 2.2% | 3.8% | 6.0% | 3.8% |
| 3 | 7.7% | 8.4% | 9.0% | 6.9% | 4.6% | 4.7% | 8.5% | 5.8% | |
| 4 | 9.1% | 9.6% | 10.5% | 9.4% | 5.6% | 6.0% | 10.6% | 6.7% | |
| 5 | 11.5% | 14.5% | 11.9% | 12.5% | 7.5% | 12.1% | 14.0% | 8.2% | |
| 6 | 16.7% | 18.2% | 16.2% | 12.9% | 19.5% | 18.8% | 24.5% | 18.9% | |
| 7 | 18.6% | 17.6% | 19.5% | 13.6% | 26.5% | 11.4% | 23.3% | 21.9% | |
| 8 | 18.1% | 14.6% | 17.7% | 29.7% | 26.2% | 18.2% | 6.2% | 16.8% | |
| 9 | 14.2% | 12.2% | 10.7% | 12.0% | 7.9% | 25.1% | 6.9% | 17.7% | |
| Case 3 | 2 | 5.5% | 4.8% | 4.4% | 3.1% | 2.4% | 5.2% | 6.2% | 3.8% |
| 3 | 8.1% | 8.1% | 8.9% | 7.3% | 5.0% | 6.1% | 8.6% | 5.7% | |
| 4 | 10.1% | 9.8% | 10.8% | 10.3% | 6.4% | 7.6% | 11.2% | 6.9% | |
| 5 | 13.2% | 15.5% | 12.8% | 13.4% | 8.3% | 18.0% | 14.9% | 8.6% | |
| 6 | 16.9% | 17.5% | 14.3% | 12.4% | 19.6% | 19.7% | 22.9% | 17.1% | |
| 7 | 18.3% | 15.2% | 17.4% | 13.3% | 25.1% | 12.9% | 22.4% | 20.1% | |
| 8 | 18.4% | 14.5% | 17.7% | 31.9% | 27.7% | 23.7% | 6.5% | 16.8% | |
| 9 | 9.4% | 14.4% | 13.7% | 8.3% | 5.5% | 6.8% | 7.4% | 21.1% | |
| Time Requested to Achieve the Target TRL as Percentage of the Overall Time at Completion | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| TRL | Total | AOCS | Avionics | EPS | Other | Propulsion | Structure | TCS | |
| Case 1 | 2 | 2 | 12.9% | 13.9% | 14.3% | 10.7% | 14.7% | 15.7% | 15.3% |
| 3 | 3 | 14.1% | 14.0% | 15.0% | 14.6% | 9.1% | 11.7% | 12.5% | |
| 4 | 4 | 12.6% | 11.9% | 14.0% | 12.7% | 12.3% | 14.4% | 10.0% | |
| 5 | 5 | 13.2% | 12.6% | 13.7% | 13.5% | 12.7% | 13.0% | 11.8% | |
| 6 | 6 | 12.7% | 11.9% | 12.4% | 17.0% | 9.5% | 12.1% | 11.2% | |
| 7 | 7 | 11.9% | 13.6% | 11.3% | 8.0% | 10.9% | 12.0% | 19.1% | |
| 8 | 8 | 11.2% | 9.4% | 10.8% | 10.7% | 12.7% | 10.5% | 9.9% | |
| 9 | 9 | 11.4% | 12.7% | 8.4% | 12.7% | 18.1% | 10.7% | 10.1% | |
| Case 2 | 2 | 2 | 17.0% | 16.2% | 17.8% | 16.1% | 13.0% | 15.6% | 15.5% |
| 3 | 3 | 13.9% | 11.7% | 15.2% | 13.1% | 9.2% | 13.1% | 11.6% | |
| 4 | 4 | 11.5% | 11.5% | 11.9% | 11.3% | 9.6% | 12.6% | 10.0% | |
| 5 | 5 | 9.3% | 10.8% | 9.1% | 9.8% | 7.2% | 6.8% | 9.7% | |
| 6 | 6 | 18.2% | 15.3% | 19.2% | 17.4% | 13.6% | 20.0% | 17.8% | |
| 7 | 7 | 15.2% | 15.5% | 14.7% | 12.5% | 15.3% | 16.9% | 17.7% | |
| 8 | 8 | 8.3% | 9.1% | 7.2% | 13.9% | 15.4% | 9.7% | 7.7% | |
| 9 | 9 | 6.7% | 10.0% | 4.9% | 5.9% | 16.8% | 5.3% | 9.9% | |
| Case 3 | 2 | 2 | 11.2% | 11.8% | 14.0% | 12.1% | 8.9% | 10.8% | 11.5% |
| 3 | 3 | 12.6% | 13.0% | 15.2% | 13.6% | 10.6% | 13.8% | 12.3% | |
| 4 | 4 | 12.2% | 12.3% | 13.6% | 12.3% | 9.6% | 14.7% | 11.6% | |
| 5 | 5 | 13.9% | 13.7% | 14.1% | 12.9% | 10.3% | 13.5% | 13.5% | |
| 6 | 6 | 14.4% | 13.6% | 13.5% | 12.4% | 11.3% | 13.3% | 15.6% | |
| 7 | 7 | 13.0% | 12.5% | 11.3% | 11.1% | 11.8% | 11.2% | 13.9% | |
| 8 | 8 | 11.7% | 10.6% | 9.5% | 16.2% | 16.7% | 12.5% | 10.2% | |
| 9 | 9 | 11.1% | 12.6% | 8.8% | 9.4% | 20.8% | 10.2% | 11.4% | |
| Time & Cost Validation Percentage Difference | ||||||||
|---|---|---|---|---|---|---|---|---|
| TRL | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
| Case 1 | Time | 2.24% | 11.61% | 11.34% | 13.48% | 11.95% | 7.13% | |
| Cost | −5.42% | −15.07% | −13.96% | −4.33% | 1.86% | |||
| Case 2 | Time | 6.14% | 11.66% | 11.64% | 15.12% | 11.90% | 7.11% | |
| Cost | −5.91% | −14.08% | −14.99% | −7.25% | 0.52% | |||
| Case 3 | Time | 2.22% | 12.18% | 11.29% | 13.59% | 11.72% | 7.08% | |
| Cost | −7.57% | −18.25% | −19.20% | −11.04% | −3.73% | |||
| ID | Name | TRL | CaC [M EUR] | AD2 |
|---|---|---|---|---|
| 1 | Low Speed Intake Ramp Technology | 6 | 350.27 | 4 |
| 2 | Low Speed Intake Duct Technology | 6 | 350.27 | 4 |
| 3 | High Speed Intake Technology | 4 | 350.27 | 5 |
| 4 | 2D Nozzle Technology | 7 | 100.51 | 1 |
| 5 | 3D Nozzle Technology | 4 | 100.51 | 5 |
| 6 | ATR Exhaust Duct Technology | 6 | 100.51 | 5 |
| 7 | ATR Variable Throat Technology | 6 | 100.51 | 5 |
| 8 | ATR Fan Technology | 6 | 620.15 | 7 |
| 9 | ATR Turbines Technology | 7 | 413.43 | 2 |
| 10 | ATR Combustor Technology | 6 | 620.15 | 5 |
| 11 | Engine Controls Technology | 6 | 413.43 | 5 |
| 12 | DMR Injection Struts Technology | 6 | 413.43 | 3 |
| 13 | Scramjet Combustor Technology | 6 | 413.43 | 6 |
| 14 | Ramjet-Scramjet Transition Technology | 4 | 620.15 | 6 |
| 15 | PAC Technology | 1 | 124.03 | 6 |
| 16 | Isolator Technology | 4 | 620.15 | 4 |
| 17 | ATR Pumps Technology | 6 | 413.43 | 2 |
| 18 | Intake Ramps Actuators Technology | 4 | 289.40 | 6 |
| 19 | Variable Throat Actuators Technology | 6 | 289.40 | 6 |
| 20 | Engine Cooled Materials (CMC) | 6 | 620.15 | 7 |
| 21 | Engine Cooled Materials (Metals) | 6 | 620.15 | 7 |
| 22 | Engine Uncooled Materials | 6 | 413.43 | 5 |
| ID | Case | [0, 1] | [1, 2] | [2, 3] | [3, 4] | [4, 5] | [5, 6] | [6, 7] | [7, 8] | [8, 9] |
|---|---|---|---|---|---|---|---|---|---|---|
| 15 | ORIGINAL | 01/06/2018 | 26/03/2019 | 26/07/2021 | 26/01/2025 | 29/08/2032 | 01/03/2036 | 04/10/2043 | 05/04/2047 | 30/12/2050 |
| CASE 1 | 01/06/2018 | 19/08/2022 | 24/03/2027 | 03/05/2031 | 18/08/2035 | 06/10/2039 | 22/08/2043 | 15/04/2047 | 31/12/2050 | |
| CASE 2 | 01/06/2018 | 11/12/2023 | 24/06/2028 | 27/03/2032 | 05/04/2035 | 10/03/2041 | 17/02/2046 | 28/10/2048 | 31/12/2050 | |
| CASE 3 | 01/06/2018 | 20/01/2022 | 23/02/2026 | 12/02/2030 | 23/08/2034 | 29/04/2039 | 25/07/2043 | 16/05/2047 | 31/12/2050 | |
| 5, 18, 14, 3, 16 | ORIGINAL | 01/06/2018 | 15/12/2027 | 01/03/2036 | 04/10/2043 | 05/04/2047 | 31/12/2050 | |||
| CASE 1 | 01/06/2018 | 12/07/2025 | 06/10/2039 | 22/08/2043 | 15/04/2047 | 31/12/2050 | ||||
| CASE 2 | 01/06/2018 | 31/08/2023 | 10/03/2041 | 17/02/2046 | 28/10/2048 | 31/12/2050 | ||||
| CASE 3 | 01/06/2018 | 24/06/2025 | 29/04/2039 | 25/07/2043 | 16/05/2047 | 31/12/2050 | ||||
| 8, 20, 21, 6, 7, 19, 13, 3, 11, 22, 10, 16, 1, 2, 12, 4, 17 | ORIGINAL | 01/06/2018 | 04/10/2043 | 05/04/2047 | 31/12/2050 | |||||
| CASE 1 | 01/06/2018 | 22/08/2043 | 15/04/2047 | 31/12/2050 | ||||||
| CASE 2 | 31/05/2018 | 17/02/2046 | 28/10/2048 | 31/12/2050 | ||||||
| CASE 3 | 01/06/2018 | 25/07/2043 | 16/05/2047 | 31/12/2050 | ||||||
| 4, 9 | ORIGINAL | 01/06/2018 | 05/04/2047 | 31/12/2050 | ||||||
| CASE 1 | 01/06/2018 | 15/04/2047 | 31/12/2050 | |||||||
| CASE 2 | 01/06/2018 | 28/10/2048 | 31/12/2050 | |||||||
| CASE 3 | 01/06/2018 | 16/05/2047 | 31/12/2050 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Narducci, G.; Fusaro, R.; Viola, N. Technology Roadmap Methodology and Tool Upgrades to Support Strategic Decision in Space Exploration. Aerospace 2025, 12, 682. https://doi.org/10.3390/aerospace12080682
Narducci G, Fusaro R, Viola N. Technology Roadmap Methodology and Tool Upgrades to Support Strategic Decision in Space Exploration. Aerospace. 2025; 12(8):682. https://doi.org/10.3390/aerospace12080682
Chicago/Turabian StyleNarducci, Giuseppe, Roberta Fusaro, and Nicole Viola. 2025. "Technology Roadmap Methodology and Tool Upgrades to Support Strategic Decision in Space Exploration" Aerospace 12, no. 8: 682. https://doi.org/10.3390/aerospace12080682
APA StyleNarducci, G., Fusaro, R., & Viola, N. (2025). Technology Roadmap Methodology and Tool Upgrades to Support Strategic Decision in Space Exploration. Aerospace, 12(8), 682. https://doi.org/10.3390/aerospace12080682