1. Introduction
The Global Navigation Satellite System (GNSS) has emerged as a foundational technology for modern positioning, navigation, and timing services [
1]. With the global deployment of the BeiDou Navigation Satellite System (BDS) and the ongoing refinement of its signal structure, the open service signals (B1C and B2a) [
2,
3] deliver improved positioning accuracy and reliability for civilian applications. These advancements also provide a richer information source for dual-frequency multi-constellation (DFMC) receivers [
4]. Dual-frequency signals offer significant advantages over traditional single-frequency signals, such as GPS L1 C/A, by effectively mitigating ionospheric delays and enhancing robustness in weak signal and high-dynamic environments [
5]. Despite these benefits, conventional receivers typically process signals from each frequency independently during the acquisition phase, failing to harness their cooperative potential [
6]. This gap is the goal of this study. This limitation constrains acquisition sensitivity and efficiency, particularly in demanding scenarios like civil aviation, where high precision and resistance to interference are paramount.
The modulation characteristics of civilian GNSS signals are summarized in
Table 1 [
1,
2,
3]. In the coming years, civil aviation is expected to adopt a new generation of DFMC receivers capable of providing signal observations across two frequency bands [
7]. This capability establishes a foundation for designing flexible baseband signal processing strategies [
6]. Dual-frequency observations enable the formation of ionosphere-free combinations through linear combinations, markedly enhancing positioning accuracy [
8]. Numerous studies have explored cooperative techniques involving pilot and data channels on the same carrier frequency, or even across different frequency bands transmitted by the same satellite, for acquisition and tracking purposes [
4,
9]. Among prior methods, multi-channel joint acquisition improves performance by combining the energy of both pilot and data components [
10]. However, most research to date applies the same integration time to signals from pilot and data channels, even at different frequency bands, which is ultimately constrained by the presence of navigation bits in the data channel [
11]. In contrast, the pilot channel, free from navigation data modulation, can employ longer integration times, enabling more robust signal acquisition in challenging environments [
12].
To maximize the mutual benefits of dual-frequency signals, this paper proposes a dual-frequency cooperative acquisition strategy. This approach aims to enhance receiver performance in complex environments by incorporating inter-frequency Doppler assistance and extending coherent integration time. A joint processing approach is employed for the B2a signal, integrating the data and pilot channels. Specifically, a non-coherent combining strategy, as proposed by Borio et al. (2009) [
13], is utilized to fuse the information from these channels. By leveraging the known frequency ratio between the B2a and B1C signals, the Doppler shift estimated from the B2a signal is used to predict the corresponding Doppler shift of the B1C signal, thereby reducing the search space [
9]. Subsequently, a 10 ms coherent integration is applied to the B1C signal to finalize the acquisition process and improve the detection of weak signals. Through cooperative processing across the two frequencies, it optimizes Doppler shift estimation, thereby increasing acquisition success rates and positioning accuracy. This method is not only tailored to the BeiDou system but is also adaptable to other multi-frequency GNSS receiver designs, offering potential applications in civil aviation for achieving higher-precision approach and landing navigation. Venturino et al. (2025) [
14] proposed an Adaptive Robust Navigation Filter (ARNF) that couples array angle-of-arrival statistics with an adaptive filtering mechanism to achieve real-time high-precision positioning in complex spoofing environments. This method offers key theoretical support and guidance for embedding anti-jamming designs after the dual-frequency cooperative acquisition in this study.
The paper is structured into four primary sections: First, we review the fundamental properties of GNSS signals and introduce a simplified dual-channel signal correlator output model. Next, we elaborate on the dual-frequency cooperative acquisition architecture, which is based on inter-frequency Doppler assistance. Subsequently, simulation experiments are conducted to evaluate the performance improvements of the proposed strategy, confirming its robustness in weak signal conditions. Finally, conclusions and future work are provided.
2. Materials and Methods
2.1. Modulation Characteristics of GNSS Signals
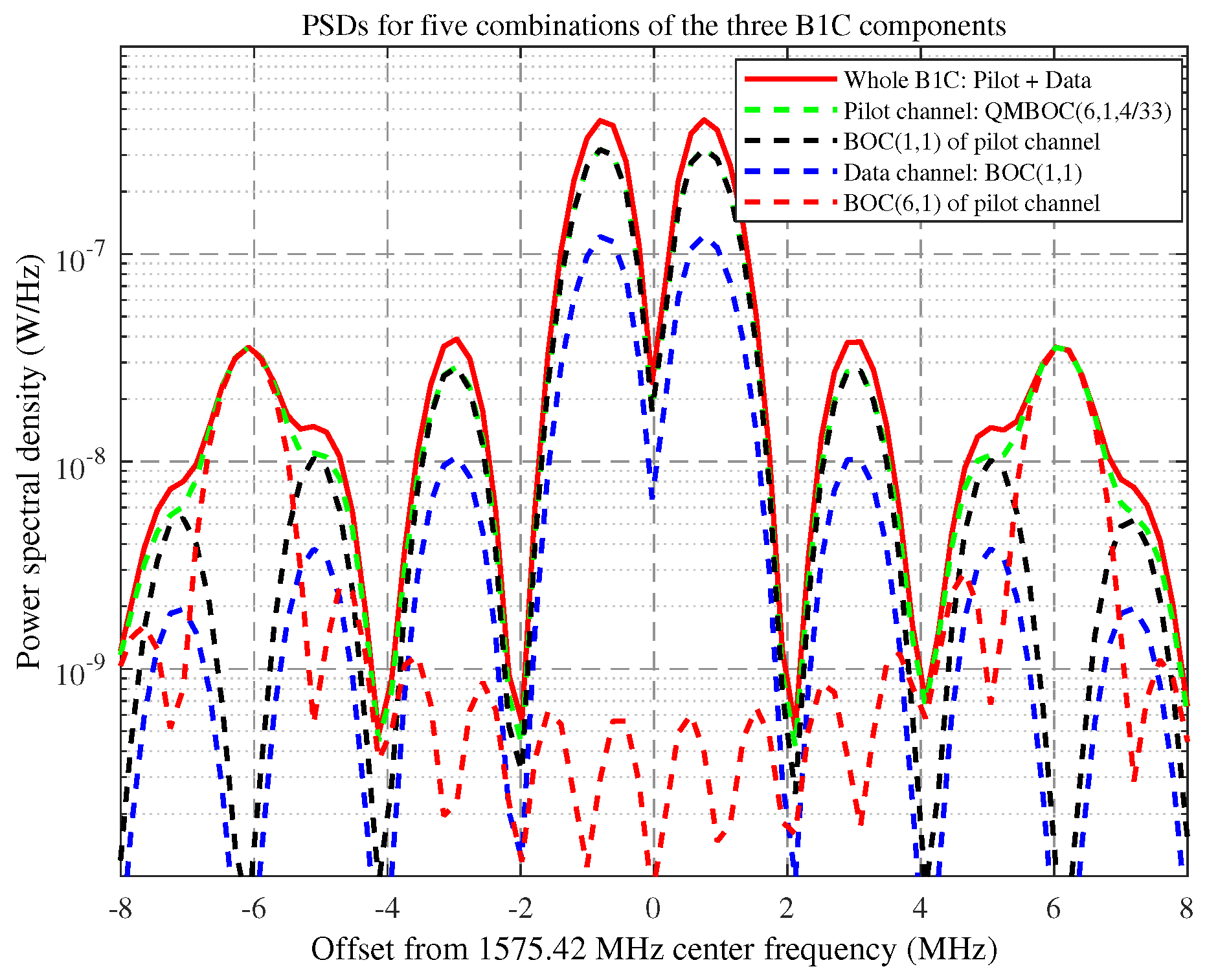
As presented in
Table 1, the B1C signal’s data component employs Binary Offset Carrier (BOC) modulation with parameters BOC(1,1), while the pilot component utilizes Quadrature Multiplexed BOC (QMBOC) modulation, specifically QMBOC (6,1,4/33). The power spectral densities (PSDs) for the three B1C components and their combinations are illustrated in
Figure 1. The received B1C signal, after baseband processing, can be expressed as follows [
15]:
where
represents the data component,
and
denote the pilot components corresponding to BOC(6,1) and BOC(1,1), respectively, and
is the additive white Gaussian noise.
In contrast, the B2a signal’s data and pilot components both utilize Binary Phase Shift Keying (BPSK) modulation with a parameter of BPSK(10). The baseband model for the B2a signal is given by [
15]:
where
is the data component,
is the pilot component, and
is the additive white Gaussian noise.
Notably, the noise terms () in the B1C and B2a signals are statistically independent and exhibit distinct variances. Compared to the B1C signal, the B2a signal benefits from higher transmit power, a lower carrier frequency, and a higher primary code frequency. These attributes confer several potential advantages to the B2a signal, including the following:
In addition, according to the Interface Control Document (ICD) [
2,
3], ephemeris data can be decoded from either the B1C or B2a data channels. However, the transmit power of the B1C data component is significantly lower than that of other components in both the B1C and B2a signals. Consequently, for BeiDou third-generation DFMC receivers, it is proposed that the B2a data channel be utilized to receive ephemeris data, while the B1C data channel may be disregarded. This approach simplifies the complexity of the dual-frequency receiver design. Further discussion of the B1C data channel will be omitted in subsequent chapters.
2.2. Correlator Output Model for GNSS Signals
To evaluate the acquisition performance of GNSS signals, this section introduces a dual-channel correlator output model. Drawing on the research by Macabiau et al. [
16], the correlator outputs for the pilot and data components can be mathematically represented as shown in the following equation:
Given that the data and pilot codes are spread using distinct pseudorandom noise (PRN) sequences, the cross-correlation between these codes is negligible in practical applications. As a result, this model can be simplified to facilitate joint acquisition analysis.
The correlator output for the data component is expressed as
Similarly, the correlator output for the pilot component is given by
In practical receivers, this assumption is generally valid due to code design and typical front-end filtering, though slight residual correlation may exist under non-ideal conditions. The variables in these equations are defined as follows:
P: total signal power at the antenna port; : navigation bit; , : secondary code bits; , and : code delay, frequency and phase errors, respectively; : cross-correlation function between the received filtered PRN signal X and the locally generated signal Y; , , , : independent additive white Gaussian noise (AWGN) terms with power , where .
2.3. Impact of RFFE Filters on GNSS Signals
The bandwidth of the radio frequency front-end (RFFE) filter plays a critical role in determining the retention of signal energy in GNSS receivers. This effect is governed by the filter’s transfer function,
, and the power spectral density (PSD) of the locally generated signal,
, as expressed in the following equation [
11]:
The impact of the RFFE filter bandwidth on signal correlation is evident in the behavior of GNSS signals. As shown in
Figure 2a, the cross-correlation function of the GPS L1 C/A signal attenuates as the filter bandwidth decreases. Similarly,
Figure 2b illustrates the correlation characteristics of the Galileo E1 signal under a 12 MHz bandwidth, which represents the minimum allowable bandwidth for Galileo E1 receivers according to the ED-259 specification. These figures collectively highlight how RFFE bandwidth influences the correlation functions of both GPS L1 C/A and Galileo E1 signals.
The results in
Figure 2 are based on theoretical, noise-free GNSS signals. In practice, increasing the bandwidth will introduce additional noise. Further analysis, presented in
Figure 2c,d, reveals that a reduction in RFFE bandwidth results in increased power loss. Given these observations, the design of GNSS receivers must carefully balance filter bandwidth with signal power loss to optimize both signal acquisition and tracking performance.
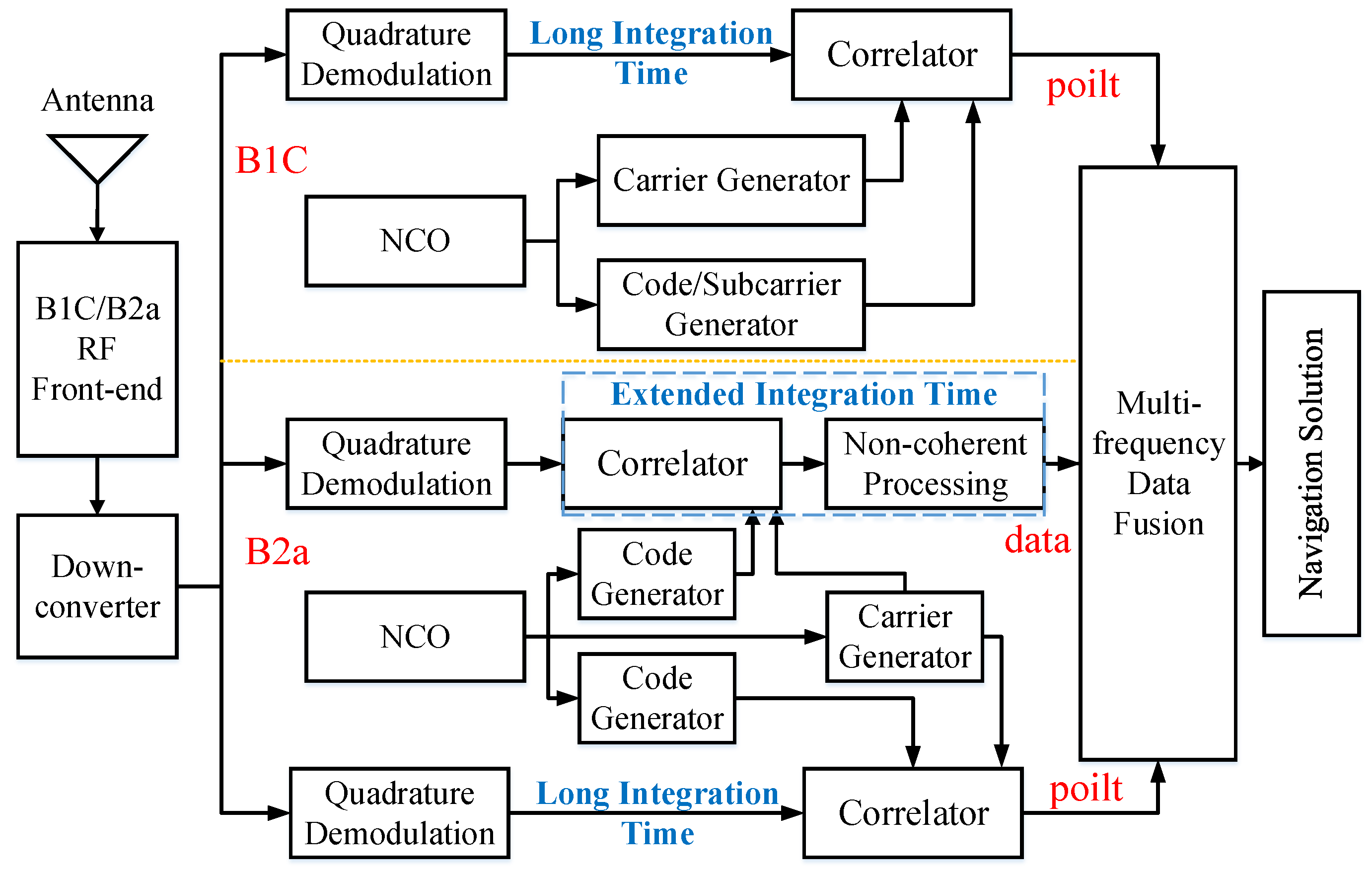
2.4. Architecture of Dual-Frequency Cooperative Acquisition Strategy
Traditional GNSS acquisition methods typically apply identical integration times to both data and pilot components of the received signals. However, the presence of navigation bit transitions in the data channel imposes constraints on extending coherent integration time, which consequently reduces acquisition sensitivity. To address this limitation and harness cooperative gains between dual-frequency signals, this study proposes a dual-frequency cooperative acquisition strategy. The architecture of this strategy is depicted in
Figure 3. Dual-frequency signals from the L1 and L5 bands are received through an antenna, digitized and down-converted by the radio frequency (RF) frontend, and subsequently processed by the acquisition module.
The signal acquisition process is realized through the cooperative handling of B1C and B2a signals. For the acquisition of the first satellite, the B2a signal is prioritized due to its lower observation noise and wider bandwidth. A short coherent integration time of 2 ms is employed to swiftly estimate the code phase and Doppler shift [
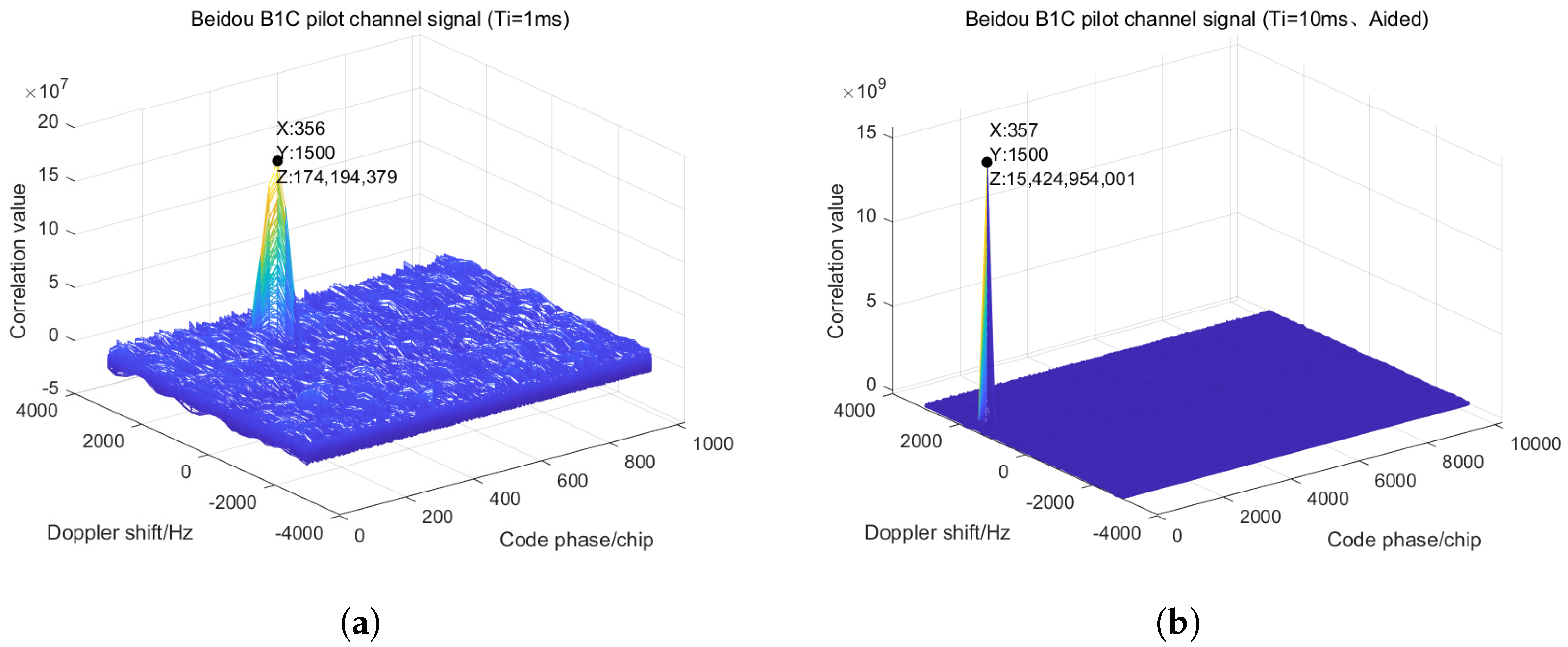
9], ensuring an efficient initial acquisition. Leveraging the Doppler estimate derived from the B2a signal and the known frequency ratio between the dual-frequency signals, the Doppler shift of the B1C signal can be predicted. This prediction substantially narrows the search range during B1C signal acquisition. When processing the B1C signal, the predicted Doppler range enables an extended coherent integration time of 10 ms, which enhances the signal-to-noise ratio (SNR) and improves the detection of weak signals.
For subsequent satellites (e.g., the 2nd to 4th satellites), the pilot component of the B2a signal adopts long coherent integration. However, the data component of the B2a signal, constrained by navigation bit transitions, utilizes a 5 ms coherent integration time, supplemented by non-coherent accumulation to further extend the total integration duration and boost the SNR [
17]. This approach significantly enhances the receiver’s sensitivity to weak signals, ensuring that a sufficient number of satellites—typically at least four—are acquired within a limited timeframe to enable positioning computation.
In contrast to the joint tracking architecture for L1/L5 frequencies proposed by Wu et al. (2019) [
4,
8,
9], this study emphasizes cooperative processing of B1C and B2a signals specifically during the acquisition phase. By exploiting the inherent linear relationship between signals of different frequencies from the same satellite, this strategy effectively reduces uncertainty in Doppler estimates for the complementary frequency band. For additional insights into Doppler assistance architectures for L1/L5 bands, readers may refer to Bolla and Borre (2019) and Wu et al. (2019) [
4,
8].
2.5. Inter-Frequency Doppler Assistance Technique
The inter-frequency Doppler assistance technique capitalizes on the intrinsic linear relationship between Doppler shifts of L1 and L5 signals transmitted by the same satellite. The center frequency of the L1 band is 1575.42 MHz, while that of the L5 band is 1176.45 MHz, yielding a frequency ratio of:
. Similarly, the code frequency ratio is determined by the respective code rates: the B1C signal has a code rate of 1.023 MHz, and the B2a signal has a code rate of 10.23 MHz, resulting in a ratio of:
. Thus, if the L5 signal has been acquired and its carrier Doppler shift
and code Doppler shift
have been estimated, the corresponding Doppler shifts for the L1 signal (
and
) can be predicted as follows:
Per the DO-292 standard (RTCA, 2004) [
18], in the absence of clock synchronization, the Doppler estimation error for the L5 signal is
. Consequently, the predicted carrier Doppler shift error for the L1 signal is calculated as
Compared to the conventional search range of ±1200 Hz used in traditional acquisition methods, this technique markedly reduces the number of search bins. During L1 signal acquisition, the Doppler search range is confined to the vicinity of the predicted value, thereby decreasing computational complexity and enhancing acquisition efficiency.
2.6. Inputs for Acquisition Threshold Calculation
Doppler uncertainty refers to the potential variation range of the actual Doppler shift of a signal, primarily induced by user dynamics (relative motion of the receiver), ephemeris errors (deviations in satellite orbit predictions), and receiver clock drift. According to RTCA DO-292 (Appendix D) [
18], the velocity uncertainty for the on-ground scenario is dominated by oscillator frequency stability, resulting in a worst-case velocity uncertainty of 300 m/s. For the en-route scenario, continuous saving of navigation data by the receiver reduces the velocity uncertainty to 51 m/s, mainly due to aircraft heading uncertainty. These velocity uncertainties can be converted into frequency uncertainties, as detailed in
Table 2.
The total number of cells in the acquisition matrix, denoted as
, is determined by the code delay uncertainty
D, the frequency uncertainty
F, the code delay bin width
, and the frequency bin width
. Mathematically, the number of cells in the acquisition matrix is expressed as
where
represents the ceiling function, rounding up to the nearest integer. The power losses resulting from code delay and frequency misalignments are given by
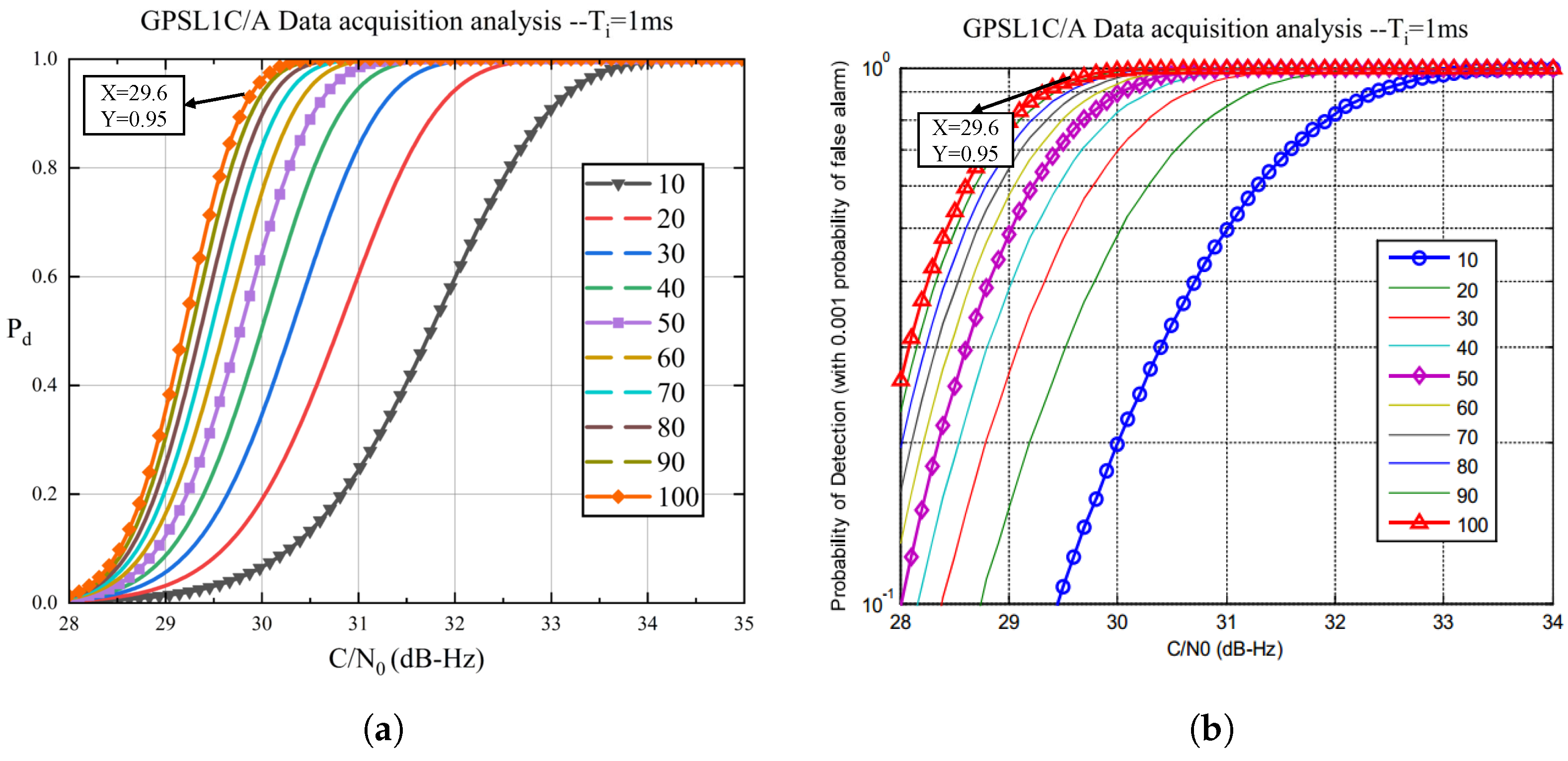
Traditional acquisition methods encounter significant challenges when addressing navigation bit transitions. For example, in the case of the GPS L1 C/A signal, the coherent integration time
is typically set to 1 ms. According to Bastide et al. [
19], the frequency bin width
is commonly configured as
. This implies that extending the coherent integration time reduces
, consequently increasing the number of Doppler frequency sets that must be searched. As noted earlier, the inter-frequency Doppler assistance technique for dual-frequency signals mitigates this limitation.
For the BeiDou B1C signal,
Figure 1 and
Figure 2 illustrates that the slope of its correlation function is approximately three times steeper than that of the GPS correlation function. As a result, Julien et al. [
20] recommend reducing the code delay bin width by a factor of three, i.e.,
, where
denotes the chip period. The resulting number of cells in the acquisition matrix is summarized in
Table 3.
2.7. Derivation of Theoretical Acquisition Thresholds
To quantitatively assess the performance of various acquisition strategies, this section derives a mathematical model for the acquisition threshold using the Neyman–Pearson detection criterion. The detection probability Pd and its relationship with the carrier-to-noise ratio () play a pivotal role in determining acquisition effectiveness. The objective here is to establish detection models for both single-component and dual-component acquisition scenarios, laying a theoretical groundwork for subsequent performance evaluations.
2.7.1. Detection Model
The signal acquisition problem can be modeled as a binary hypothesis test:
H0 (Null Hypothesis): The target signal is absent. However, cross-correlation interference from other GNSS signals may be present.
H1 (Alternative Hypothesis): The target signal is present, with the Doppler frequency and code delay of the detection cell aligning with those of the received signal. For single-component acquisition [21], the normalized detector T1 follows a non-central chi-squared distribution with 2MT1 degrees of freedom. The non-centrality parameter is expressed as For dual-component acquisition, the normalized detector
follows a non-central chi-squared distribution with
degrees of freedom, and its non-centrality parameter is given by
Here,
denotes the cross-correlation between the interfering signal’s PRN code and the local PRN code, and M represents the number of non-coherent integrations. The values of cross-correlation interference are consistent with those specified in RTCA standards [
18,
21] and the findings of Sun et al. [
22], as detailed in
Table 4.
2.7.2. Calculation of Threshold and Detection Probability
Under the hypotheses and , the detection probability is a function of the GNSS signal’s , where X represents the target signal. The computation of proceeds in two steps:
Step 1: The detection threshold
is derived from the distribution of the detector
and the false alarm rate
:
Step 2: Under
, the detection probability is calculated as
Since
,
can be treated as a uniformly distributed random variable, the average detection probability is obtained through integration:
where
is the cumulative distribution function of the chi-squared distribution. The acquisition sensitivity is defined as the minimum
at which
.
4. Discussion
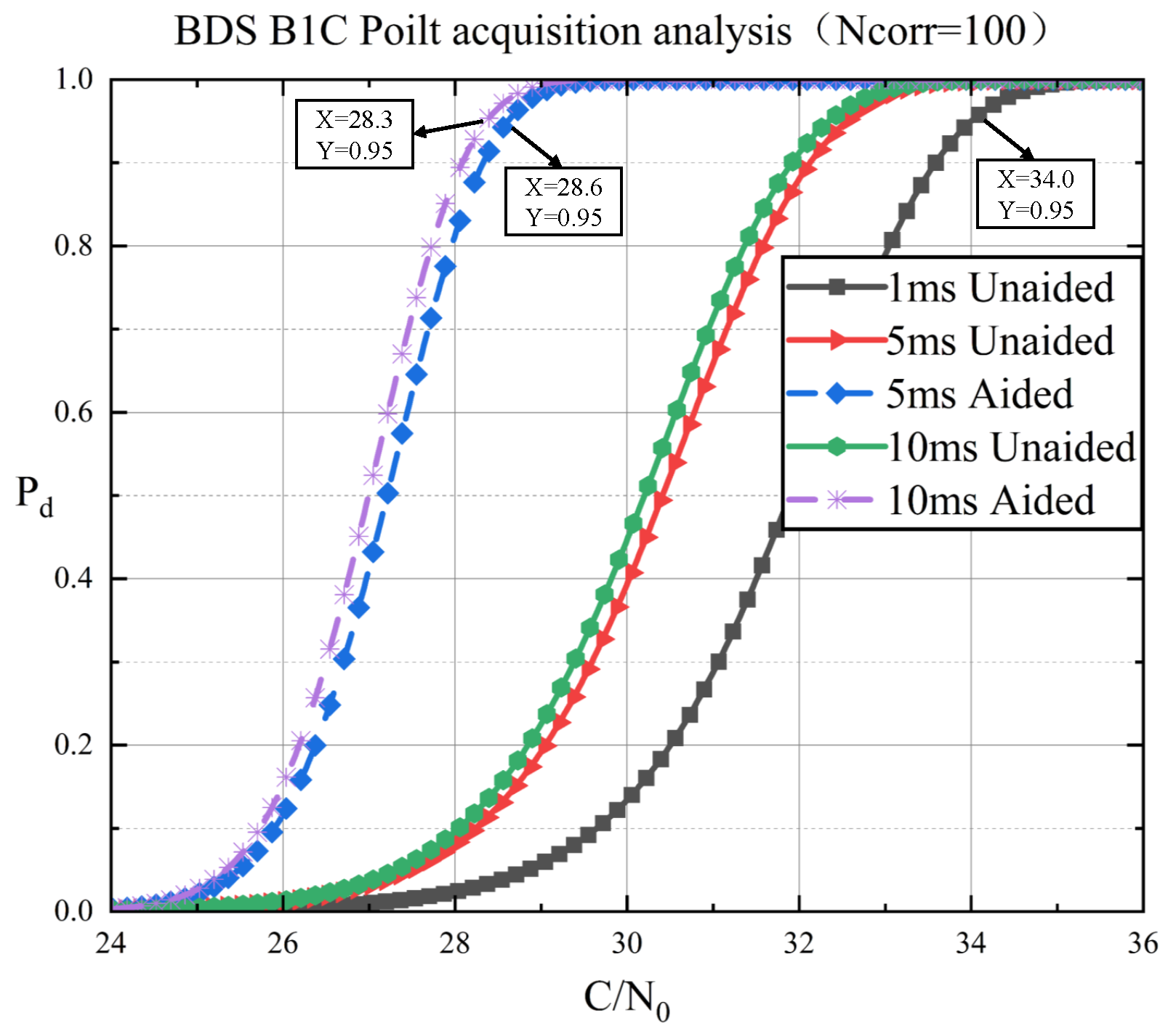
This study presents a novel dual-frequency cooperative acquisition strategy tailored for BeiDou DFMC receivers, designed to enhance signal acquisition performance in challenging weak signal environments. By leveraging inter-frequency Doppler assistance and extended coherent integration times, this approach markedly improves sensitivity compared to conventional methods. Traditional acquisition techniques often face limitations due to navigation bit transitions in the data channel, which restrict integration duration. In contrast, our strategy optimizes the processing of the B1C and B2a pilot components, effectively circumventing these constraints.
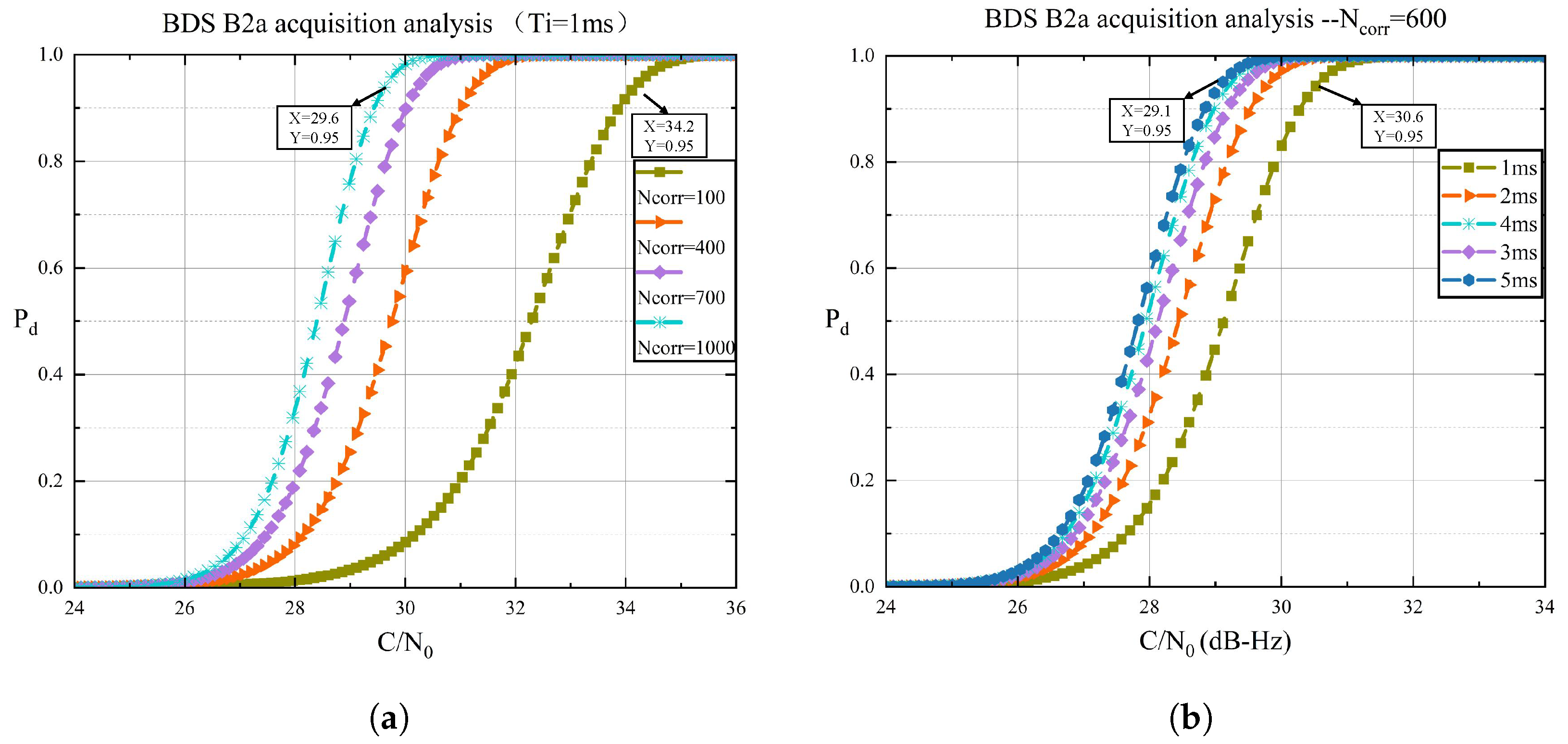
Simulation results highlight the efficacy of the proposed method. For the B1C pilot component, acquisition sensitivity improved by 5.7 dB, reducing the acquisition threshold from 34.0 to 28.3 dB-Hz. Similarly, for the B2a signal, the dual-channel cooperative approach lowered the threshold to 29.1 dB-Hz using 600 correlators—a configuration compatible with practical hardware limitations. These improvements stem from exploiting the linear frequency relationship between the B1C and B2a signals, which reduces Doppler search uncertainty. This enables longer integration periods without a proportional increase in computational overhead, making the strategy particularly effective for detecting weak signals, such as those from low-elevation satellites.
In this study, weak signal conditions are defined as scenarios in which conventional methods fail to acquire a satellite, while the proposed strategy succeeds. This practical definition avoids reliance on a fixed
threshold [
24]. The theoretical framework underpinning this method aligns with the RTCA-DO235C standard, reinforcing its reliability and applicability to high-precision BeiDou applications. These advancements position the strategy as a promising solution for next-generation GNSS receivers operating in diverse environments.
Looking ahead, several avenues warrant further exploration. Hardware implementation and real-world testing in scenarios such as urban canyons or high-dynamic conditions are essential to validate the strategy’s practical performance. Moreover, integrating adaptive integration times or advanced filtering techniques could bolster resilience against interference and multipath effects, further enhancing robustness. Future work will include comparisons with adaptive acquisition techniques to further assess performance. This research establishes a solid foundation for the design of BeiDou DFMC receivers and holds potential for broader application across other multi-frequency GNSS systems.
5. Conclusions
This study proposes a dual-frequency cooperative acquisition strategy for BeiDou DFMC receivers. By extending the integration time of the pilot component and leveraging inter-frequency Doppler assistance, the strategy significantly improves acquisition sensitivity in weak signal environments. Simulation results demonstrate that, for the B1C pilot component, a 10 ms coherent integration combined with inter-frequency Doppler assistance enhances the acquisition sensitivity from 34.0 to 28.3 dB-Hz, yielding a gain of 5.7 dB. For the B2a signal, the dual-channel cooperative acquisition strategy reduces the acquisition threshold to 29.1 dB-Hz with 600 correlators. The acquisition threshold is derived based on the Neyman–Pearson detection criterion, and the simulation outcomes are consistent with the RTCA-DO235C standard, confirming the model’s validity. This research provides theoretical support and simulation-based evidence for the acquisition design of BeiDou DFMC receivers, establishing a foundation for high-precision positioning applications. Nevertheless, several important aspects remain for future work. Comprehensive hardware implementation and field testing under diverse and challenging conditions will be pursued to fully validate the proposed method in practical environments. In addition, further comparative studies with other advanced acquisition techniques will be conducted to provide a more thorough performance assessment and promote broader applicability in next-generation GNSS receivers.
_Zhu.png)




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}