
Visual Detection on Aircraft Wing Icing Process Using a Lightweight Deep Learning Model

Abstract
1. Introduction
2. Materials and Methods
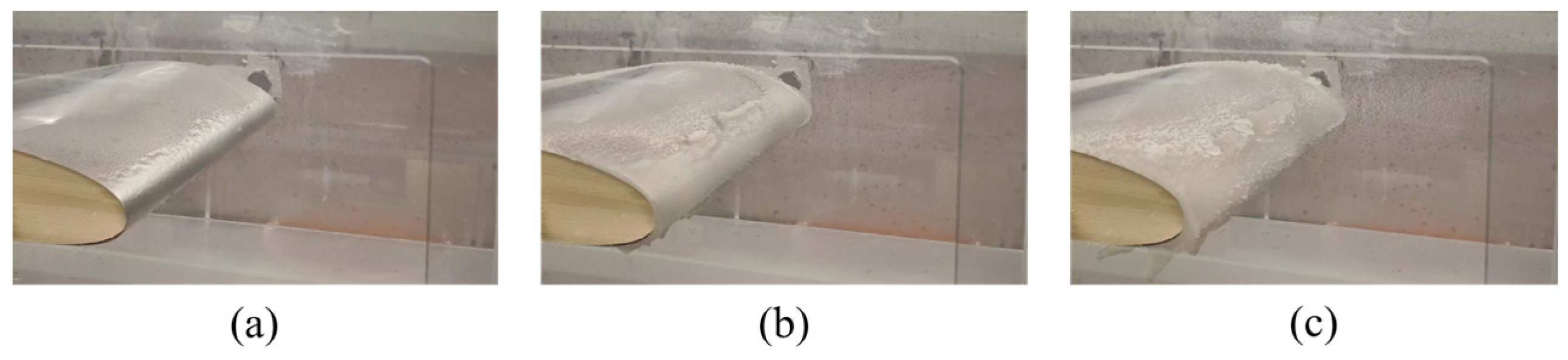
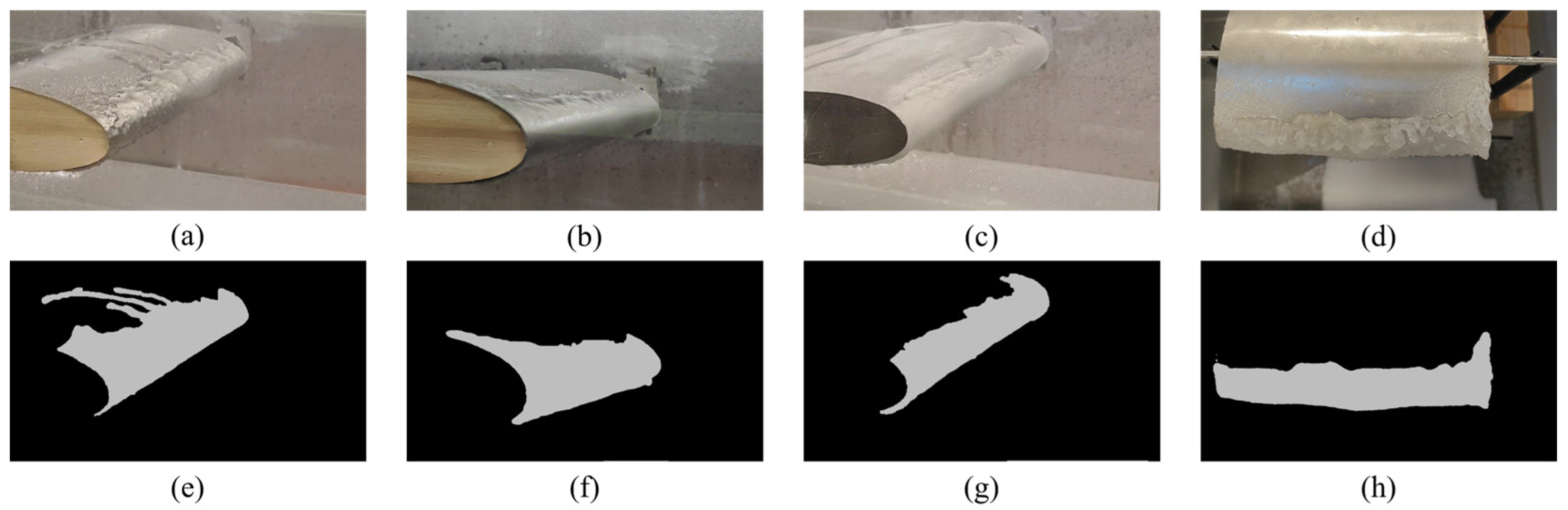
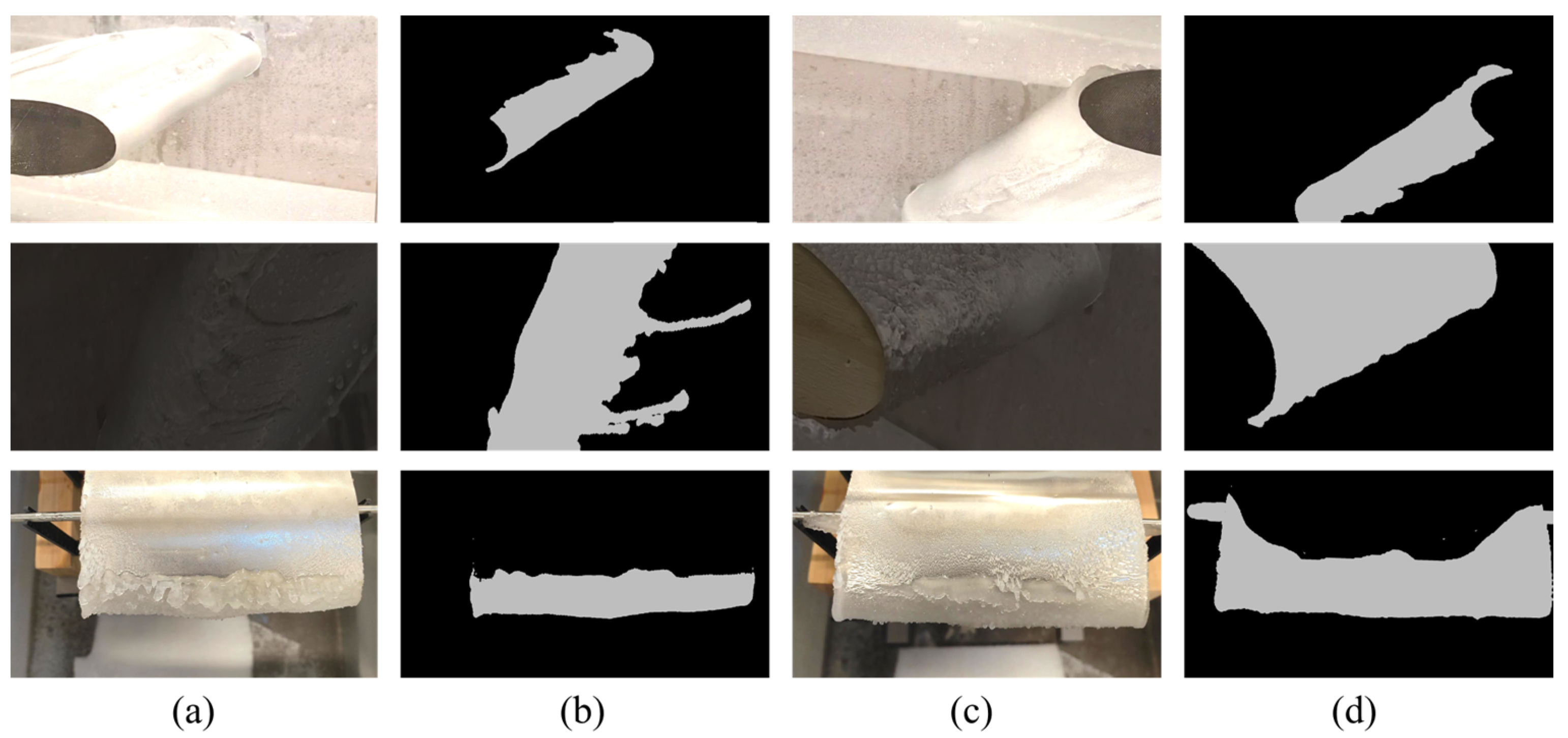
2.1. Image Data Acquisition Annotation
2.2. Data Augmentation
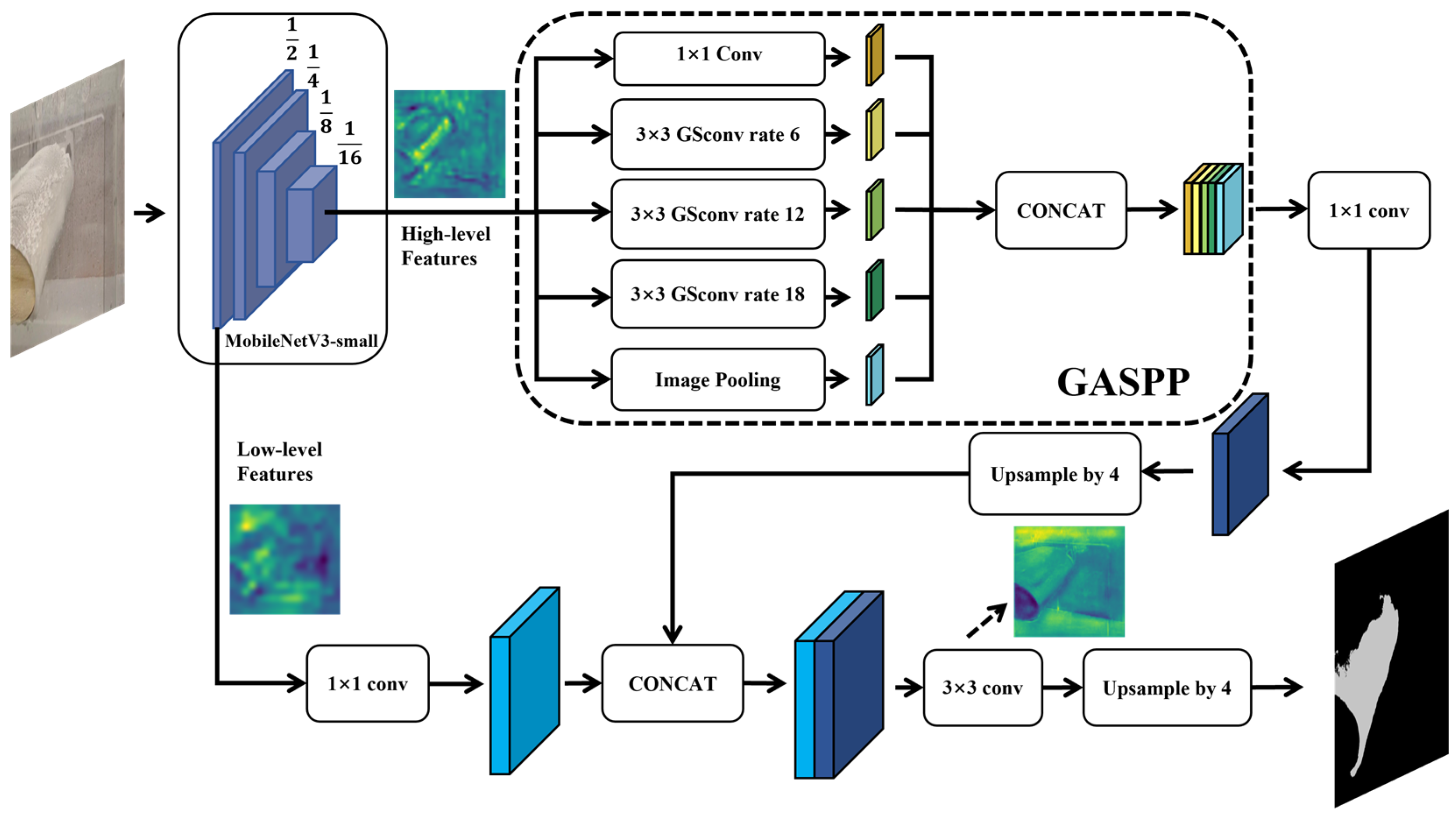
2.3. Improved DeeplabV3+ for the Leading Edge of Airfoil Icing Detection
2.3.1. MobileNetV3 as Backbone
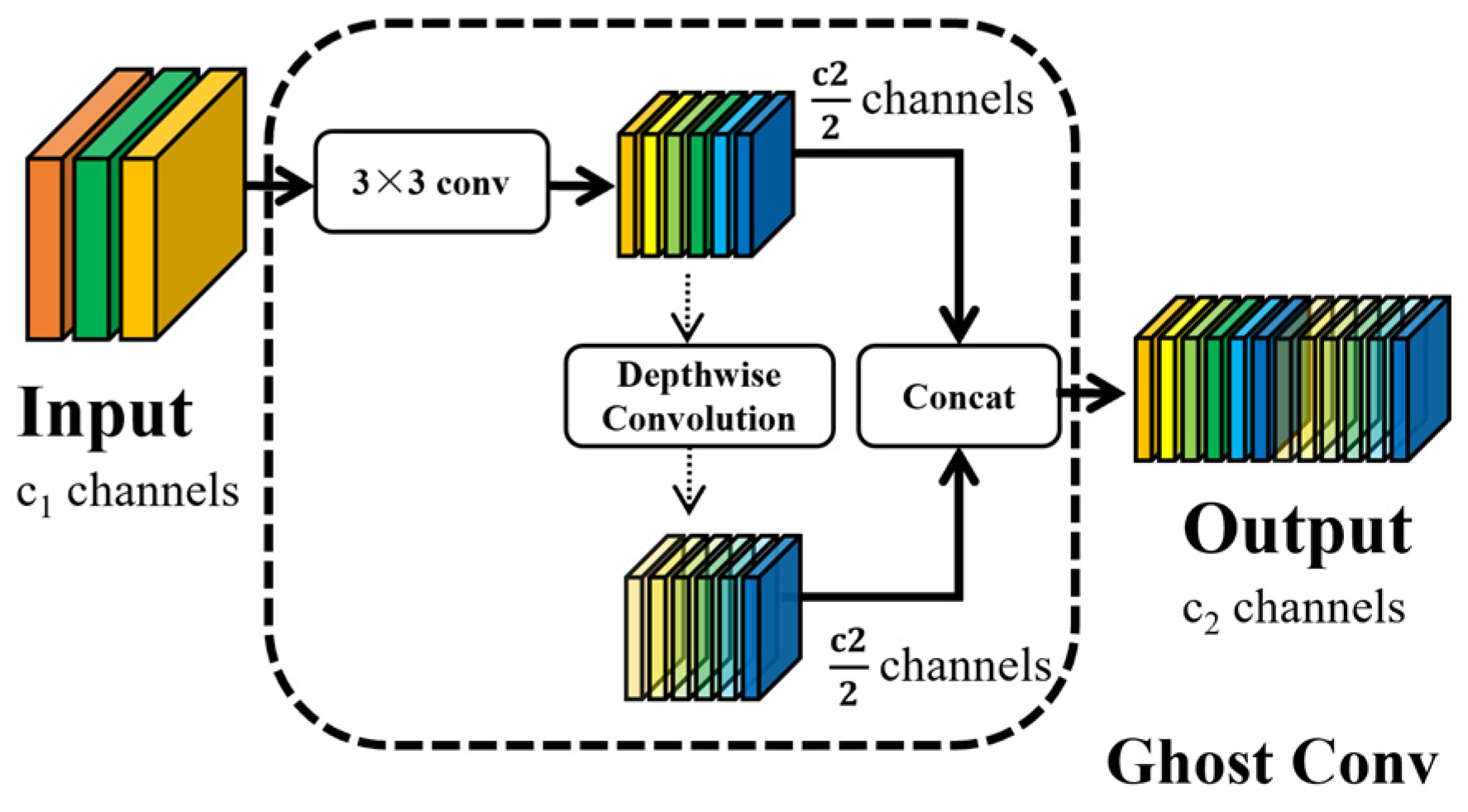
2.3.2. Ghost Atrous Spatial Pyramid Pooling Module
2.4. Evaluation Standard
3. Experimental Result and Analysis
3.1. Experimental Platform and Parameter Settings
3.2. Comparisons of Effects Before and After Improvement of the Model
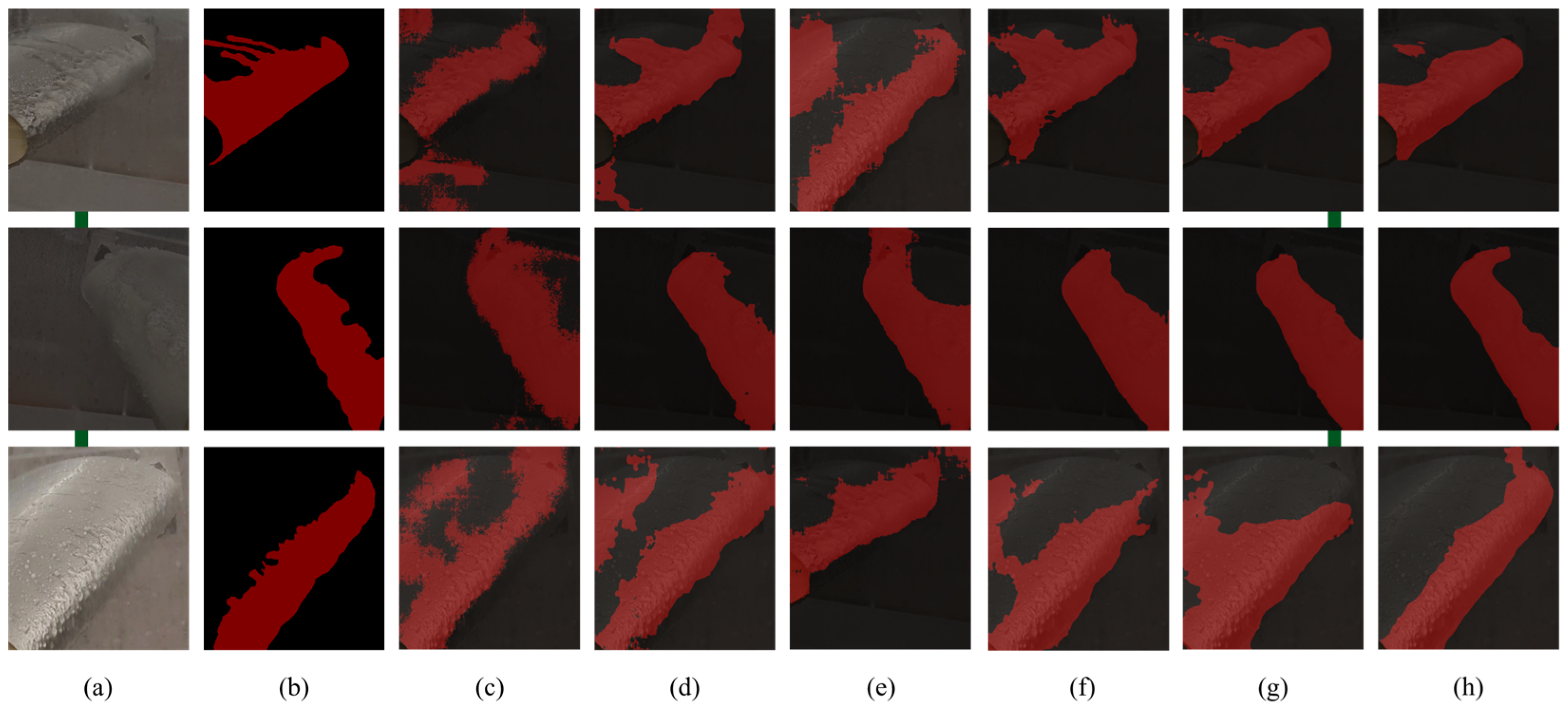
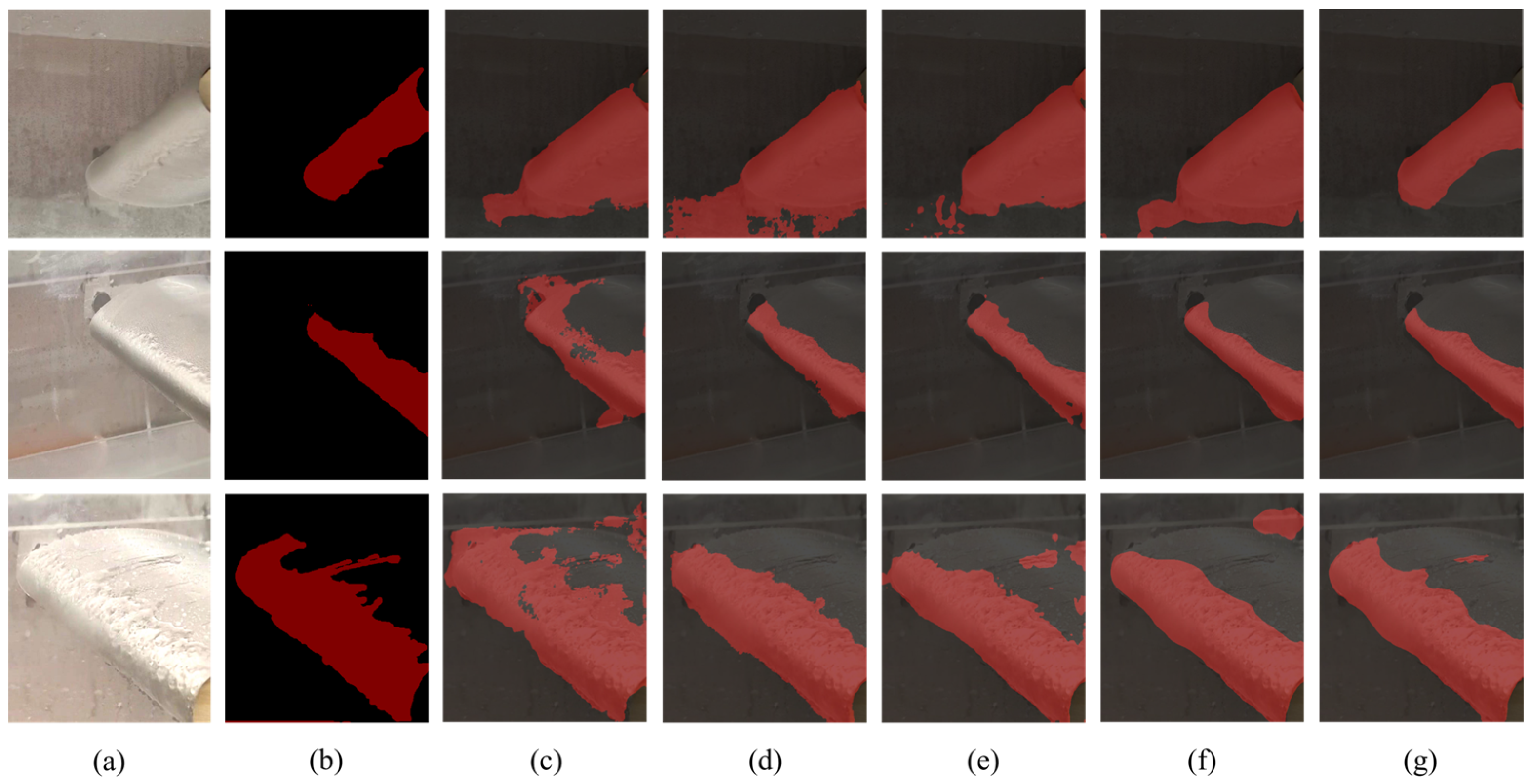
3.3. Comparison Experiments of Different Models
3.4. Network Improvement Ablation Experiments
4. Discussion
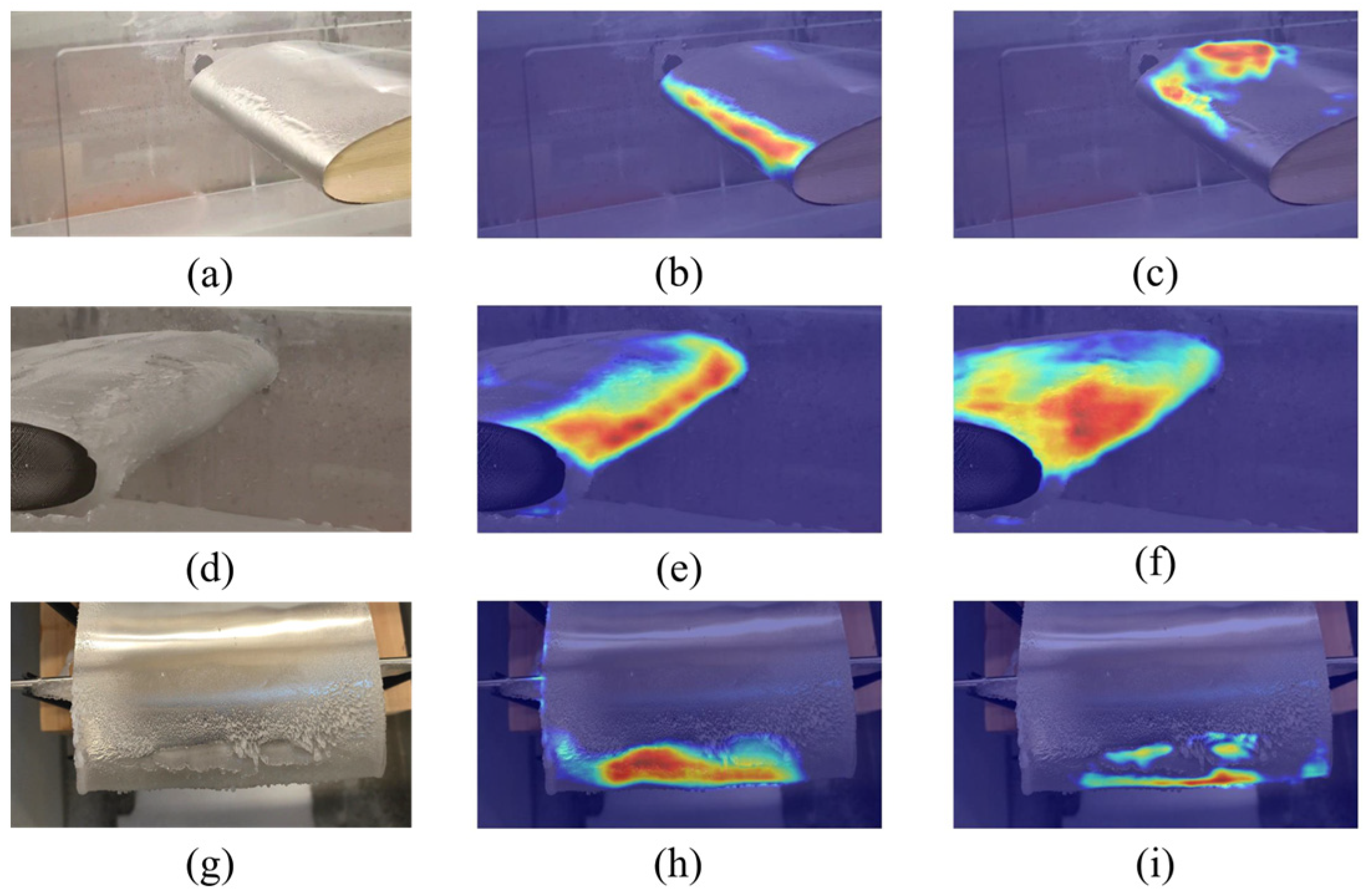
4.1. Feasibility Analysis of Wing Leading Edge Icing Detection Under Natural Lighting Conditions
4.2. Limitations of the WID-DeeplabV3+ Model
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
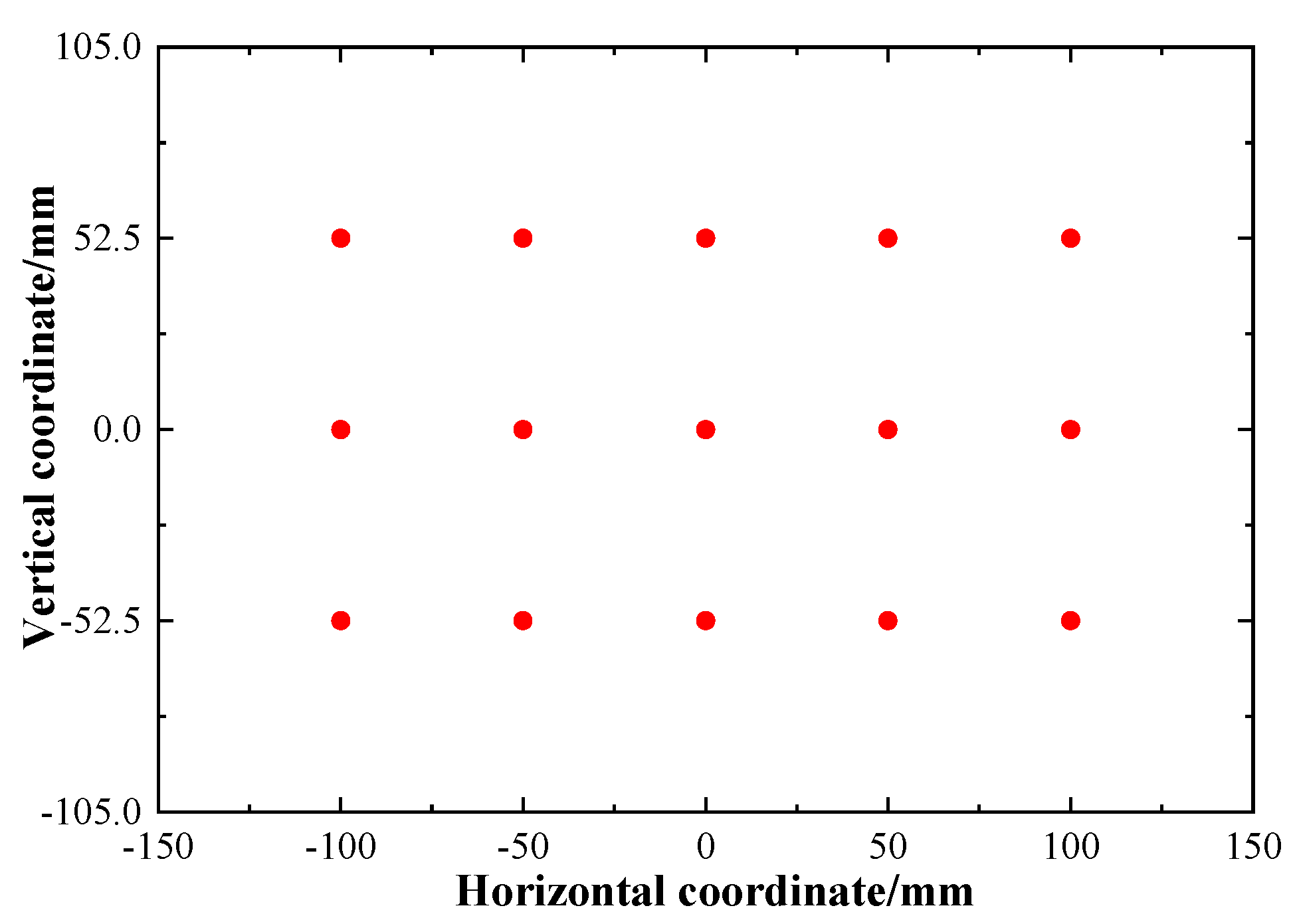
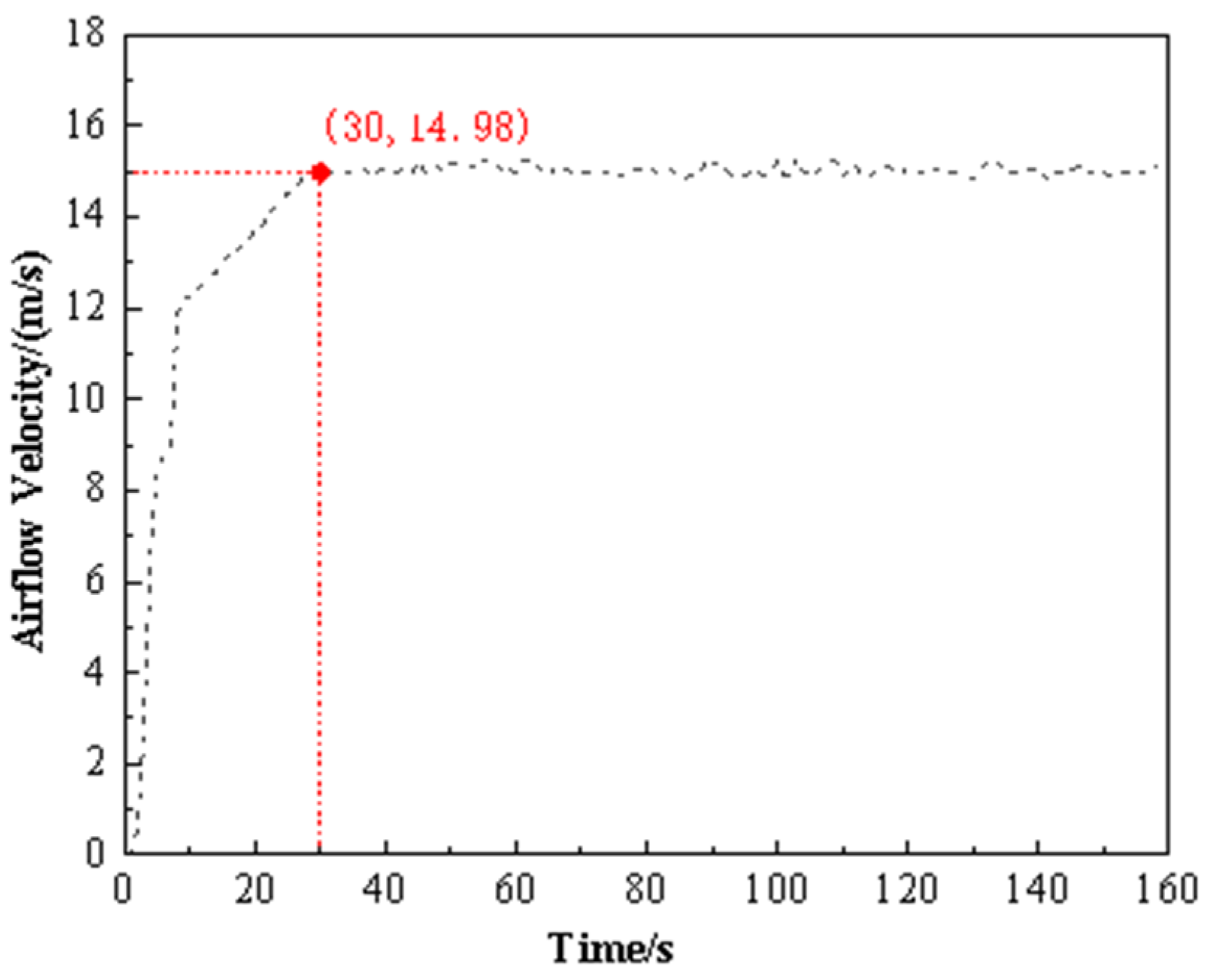
Appendix A.1. The Wind Speed and Wind Speed Uniformity Test

Appendix A.2. The Minimum Temperature and Temperature Uniformity Test


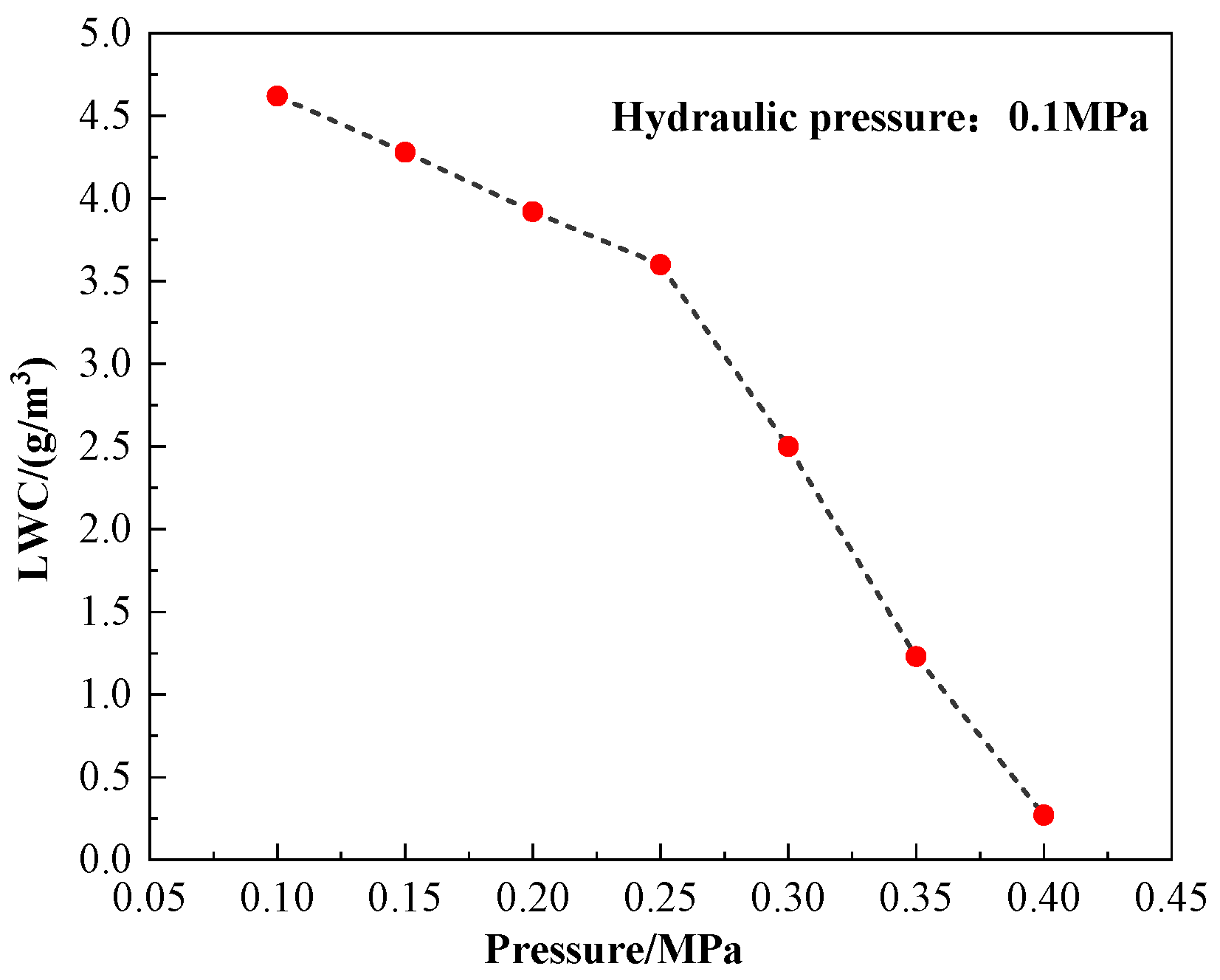
Appendix A.3. The MVD and LWC Test

References
- Yi, X.; Gui, Y.; Zhu, G.; Du, Y. Experimental and computational investigation into ice accretion on airfoil of a transport aircraft. J. Aerosp. Power 2011, 26, 808–813. [Google Scholar] [CrossRef]
- Mason, B.J. Physics of Clouds and Precipitation. Nature 1954, 174, 957–959. [Google Scholar] [CrossRef]
- Wang, H.; Huang, X.; Zhang, B. Design Theory of Vibrating-tube Ice Detector. Instrum. Tech. Sens. 2008, 3, 9–11. [Google Scholar] [CrossRef]
- Wei, L.; Jie, Z.; Lin, Y. A Fiber-Optic Aircraft Icing Detection System Using Double Optical Paths Based on the Theory of Information Fusion. Chin. J. Sens. Actuators 2009, 22, 1352–1355. [Google Scholar] [CrossRef]
- Zhou, J. Aircraft Icing Type Detection Based on Oblique End-face Fiber Optic Technology. Master’s Thesis, Huazhong University of Science and Technology, Wuhan, China, 2014. [Google Scholar] [CrossRef]
- Cheng, P.; Wu, C. Neural network based robust adaptive nonlinear control for aircraft under one side of wing loss. Syst. Eng. Electron. 2016, 38, 607–617. [Google Scholar]
- Yi, X.; Zhu, G.; Wang, K.; Li, S. Numerically simulating of ice accretion on airfoil. Acta Aerodyn. Sin. 2002, 20, 428–433. [Google Scholar] [CrossRef]
- Yi, X.; Wang, K.; Ma, H.; Zhu, G. 3-D numerical simulation of droplet collection efficiency in large-scale wind turbine icing. Acta Aerodyn. Sin. 2013, 31, 745–751. [Google Scholar]
- Gui, X.; Zeng, F.; Gao, J.; Fu, X.; Li, Z. Detection of Aircraft wing icing and de-icing by optical fiber sensing with FBG array. Measurement 2025, 247, 116748. [Google Scholar] [CrossRef]
- Zheng, D.; Li, Z.; Du, Z.; Ma, Y.; Zhang, L.; Du, C.; Li, Z.; Cui, L.; Xuan, X.; Deng, X. Design of capacitance and impedance dual-parameters planar electrode sensor for thin ice detection of aircraft wings. IEEE Sens. J. 2022, 22, 11006–11015. [Google Scholar] [CrossRef]
- Ikiades, A. Fiber optic ice sensor for measuring ice thickness, type and the freezing fraction on aircraft wings. Aerospace 2022, 10, 31. [Google Scholar] [CrossRef]
- Ding, L.; Yi, X.; Hu, Z.; Guo, X. Experimental Study on Optimum Design of Aircraft Icing Detection Based on Large-Scale Icing Wind Tunnel. Aerospace 2023, 10, 926. [Google Scholar] [CrossRef]
- Kim, Y.; Ye, B.-Y.; Suk, M.-K. AIDER: Aircraft Icing Potential Area DEtection in Real-Time Using 3-Dimensional Radar and Atmospheric Variables. Remote. Sens. 2024, 16, 1468. [Google Scholar] [CrossRef]
- Abdelghany, E.S.; Farghaly, M.B.; Almalki, M.M.; Sarhan, H.H.; Essa, M.E.-S.M. Machine learning and iot trends for intelligent prediction of aircraft wing anti-icing system temperature. Aerospace 2023, 10, 676. [Google Scholar] [CrossRef]
- Li, S.; Qin, J.; He, M.; Paoli, R. Fast evaluation of aircraft icing severity using machine learning based on XGBoost. Aerospace 2020, 7, 36. [Google Scholar] [CrossRef]
- Strijhak, S.; Ryazanov, D.; Koshelev, K.; Ivanov, A. Neural network prediction for ice shapes on airfoils using icefoam simulations. Aerospace 2022, 9, 96. [Google Scholar] [CrossRef]
- Hoover, G.A. Aircraft Ice Detectors and Related Technologies for Onground and Inflight Applications; Fedaral Aviation Administration Technical Center; Atlantic City International Airport: Atlantic County, NJ, USA, 1993; Volume 1993, p. 54. Available online: http://catalog.hathitrust.org/Record/102586835 (accessed on 1 April 1993).
- Ikiades, A.A.; Armstrong, D.J.; Hare, G.G.; Konstantaki, M.; Crossley, S.D.; Culshaw, B.; Marcus, M.A.; Dakin, J.P.; Knee, H.E. Fiber optic sensor technology for air conformal ice detection. Ind. Highw. Sens. Technol. 2004, 5272, 357–368. [Google Scholar] [CrossRef]
- Guo, L.; Qin, S.; Li, Q.; Liu, S.; Wang, Z. Research on ice contour extraction of aircraft model based on machine vision. Autom. Instrum. 2020, 6, 15–20. [Google Scholar]
- Qu, J.; Wang, Q.; Peng, B.; Yi, X. Icing prediction method for arbitrary symmetric airfoil using multimodal fusion. J. Aerosp. Power 2024, 39, 20220143. [Google Scholar] [CrossRef]
- Suo, W.; Sun, X.; Zhang, W.; Yi, X. Aircraft ice accretion prediction based on geometrical constraints enhancement neural networks. Int. J. Numer. Methods Heat Fluid Flow 2024, 34, 3542–3568. [Google Scholar] [CrossRef]
- Yu, D.; Han, Z.; Zhang, B.; Zhang, M.; Liu, H.; Chen, Y. A fused super-resolution network and a vision transformer for airfoil ice accretion image prediction. Aerosp. Sci. Technol. 2024, 144, 108811. [Google Scholar] [CrossRef]
- Zhang, D.; Wei, P.; Li, Q.; Tan, M. Novel Wing Icing Area Recognition Based on Morphological Processing Enhanced U-Net Network. In Proceedings of the 2021 IEEE 3rd International Conference on Civil Aviation Safety and Information Technology (ICCASIT), Changsha, China, 20–22 October 2021; pp. 1194–1997. [Google Scholar] [CrossRef]
- Su, X.; Guan, R.; Wang, Q.; Yuan, W.; Lyu, X.; He, Y. Ice area and thickness detection method based on deep learning. Acta Aeronaut. Astronaut. Sin. 2023, 44, 205–213. [Google Scholar] [CrossRef]
- Chen, L.-C.; Zhu, Y.; Papandreou, G.; Schroff, F.; Adam, H. Encoder-decoder with atrous separable convolution for semantic image segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Munich, Germany, 8–14 September 2018; pp. 801–818. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef]
- Chollet, F. Xception: Deep learning with depthwise separable convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1251–1258. [Google Scholar] [CrossRef]
- Howard, A.; Sandler, M.; Chen, B.; Wang, W.; Chu, G.; Chen, L.-C.; Chen, B.; Tan, M.; Vasudevan, V.; Zhu, Y.; et al. Searching for mobilenetv3. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 1314–1324. [Google Scholar] [CrossRef]
- Han, K.; Wang, Y.; Tian, Q.; Guo, J.; Xu, C.; Xu, C. Ghostnet: More features from cheap operations. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 13–19 June 2020; pp. 1580–1589. [Google Scholar] [CrossRef]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.-C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018; pp. 4510–4520. [Google Scholar] [CrossRef]
- Sun, K.; Xiao, B.; Liu, D.; Wang, J. Deep high-resolution representation learning for human pose estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 5693–5703. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Ma, Y.; Liu, Q.; Qian, Z. Automated image segmentation using improved PCNN model based on cross-entropy. In Proceedings of the 2004 International Symposium on Intelligent Multimedia Video and Speech Processing, Hong Kong, China, 20–22 October 2004; pp. 743–746. [Google Scholar]
- Kingma, D.P. Adam: A method for stochastic optimization. In Proceedings of the International Conference for Learning Representations, San Diego, CA, USA, 7–9 May 2015. [Google Scholar] [CrossRef]
- Powers, D.M. Evaluation: From precision, recall and F-measure to ROC, informedness, markedness and correlation. Int. J. Mach. Learn. Technol. 2011, 2, 37–63. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the Medical Image Computing and Computer-Assisted Intervention–MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar] [CrossRef]
- Valanarasu, J.M.J.; Patel, V.M. Unext: Mlp-based rapid medical image segmentation network. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Singapore, 18–22 September 2022; pp. 23–33. [Google Scholar] [CrossRef]
- Zhao, H.; Shi, J.; Qi, X.; Wang, X.; Jia, J. Pyramid scene parsing network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 2881–2890. [Google Scholar] [CrossRef]
- Yu, C.; Wang, J.; Peng, C.; Gao, C.; Yu, G.; Sang, N. Bisenet: Bilateral segmentation network for real-time semantic segmentation. In Proceedings of the European Conference on Computer Vision (ECCV), Malmö, Sweden, 8–13 September 2018; pp. 325–341. [Google Scholar] [CrossRef]
- Paszke, A.; Chaurasia, A.; Kim, S.; Culurciello, E. Enet: A deep neural network architecture for real-time semantic segmentation. arXiv 2016, arXiv:1606.02147. [Google Scholar] [CrossRef]
- Li, G.; Yun, I.; Kim, J.; Kim, J. Dabnet: Depth-wise asymmetric bottleneck for real-time semantic segmentation. In Proceedings of the 30th British Machine Vision Conference, Cardiff, UK, 9–12 September 2019. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.; Li, K.; Li, F. Imagenet: A large-scale hierarchical image database. In Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 18 August 2009; pp. 248–255. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Wing Model | Angle of Attack | Environmental Temperature | Air Velocity | Medium Volume Diameter | Liquid Water Content |
|---|---|---|---|---|---|
| NACA0020 | 0° | −10 °C | 15 m/s | 18 μm | 2.5 g/m3 |
| 0° | −15 °C | ||||
| 5° | −10 °C | ||||
| 5° | −15 °C | ||||
| BoeingB27 | 0° | −10 °C | |||
| 0° | −15 °C | ||||
| 5° | −10 °C | ||||
| 5° | −15 °C |
| Method | Backbone | Accuracy (%) | IOU (%) | Precision (%) | Recall (%) | Dice (%) | Params (M) | Floats (G) |
|---|---|---|---|---|---|---|---|---|
| DeeplabV3+ | htnetv2 | 93.86 | 87.90 | 93.78 | 93.33 | 93.55 | 33.91 | 115.19 |
| ResNet50 | 91.01 | 82.84 | 90.68 | 90.47 | 90.57 | 39.76 | 59.77 | |
| Xception | 95.32 | 90.61 | 95.21 | 94.92 | 95.06 | 37.05 | 50.60 | |
| MobileNetv2 | 95.46 | 90.90 | 95.38 | 95.07 | 95.22 | 5.22 | 16.92 | |
| MobileNetV3 | 95.70 | 91.34 | 95.53 | 95.40 | 95.46 | 2.33 | 12.07 |
| Hardware | Config | Software | Config |
|---|---|---|---|
| CPU | 4 cores | System | Windows |
| GPU | Tesla V100 | PyTorch | 2.6.0 |
| RAM | 32 G | CUDA | 12.4 |
| Hard disk | 100 G | CUDNN | 9.1.0 |
| Method | Accuracy (%) | IOU (%) | Precision (%) | Recall (%) | Dice (%) | Params (M) | Floats (G) | Inference Time |
|---|---|---|---|---|---|---|---|---|
| DeeplabV3+ | 95.32 | 90.61 | 95.21 | 94.92 | 95.06 | 37.05 | 50.60 | 0.14 |
| WID-DeeplabV3+ | 97.15 | 94.16 | 97.00 | 96.96 | 96.98 | 1.70 | 11.92 | 0.03 |
| Method | Accuracy (%) | IOU (%) | Precision (%) | Recall (%) | Dice (%) | Params (M) | Floats (G) |
|---|---|---|---|---|---|---|---|
| FCN | 86.89 | 75.90 | 86.48 | 86.00 | 86.23 | 18.64 | 102.00 |
| SegNet | 91.77 | 86.14 | 91.63 | 91.11 | 91.36 | 29.44 | 160.67 |
| UNet | 90.97 | 82.74 | 90.85 | 90.24 | 90.54 | 17.26 | 160.76 |
| UNext | 91.13 | 82.99 | 90.89 | 90.64 | 90.76 | 1.47 | 22.96 |
| ENet | 93.58 | 87.38 | 93.52 | 93.01 | 93.26 | 0.35 | 2.17 |
| DABNet | 94.62 | 89.29 | 94.45 | 94.15 | 94.29 | 0.75 | 5.28 |
| BiSeNet | 94.29 | 88.66 | 94.02 | 93.91 | 93.96 | 12.80 | 13.04 |
| PSPNet | 93.45 | 87.10 | 93.14 | 93.02 | 93.07 | 49.07 | 194.40 |
| DeeplabV3+ | 95.32 | 90.61 | 95.21 | 94.92 | 95.06 | 37.05 | 50.60 |
| WID-DeeplabV3+ | 97.15 | 94.16 | 97.00 | 96.96 | 96.98 | 1.70 | 11.92 |
| DeeplabV3+ | MobileNetV3 | GASPP | Pretrain | Accuracy (%) | IOU (%) | Precision (%) | Recall (%) | Params (M) | Floats (G) |
|---|---|---|---|---|---|---|---|---|---|
| √ | 95.32 | 90.61 | 95.21 | 94.92 | 37.05 | 50.60 | |||
| √ | √ | 95.70 | 91.34 | 95.53 | 95.40 | 2.33 | 12.07 | ||
| √ | √ | √ | 95.83 | 91.58 | 95.64 | 95.54 | 1.70 | 11.92 | |
| √ | √ | √ | √ | 97.15 | 94.16 | 97.00 | 96.96 | 1.70 | 11.92 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Y.; Tang, C.; Huang, J.; Cen, Z.; Xie, Z. Visual Detection on Aircraft Wing Icing Process Using a Lightweight Deep Learning Model. Aerospace 2025, 12, 627. https://doi.org/10.3390/aerospace12070627
Yan Y, Tang C, Huang J, Cen Z, Xie Z. Visual Detection on Aircraft Wing Icing Process Using a Lightweight Deep Learning Model. Aerospace. 2025; 12(7):627. https://doi.org/10.3390/aerospace12070627
Chicago/Turabian StyleYan, Yang, Chao Tang, Jirong Huang, Zhixiong Cen, and Zonghong Xie. 2025. "Visual Detection on Aircraft Wing Icing Process Using a Lightweight Deep Learning Model" Aerospace 12, no. 7: 627. https://doi.org/10.3390/aerospace12070627
APA StyleYan, Y., Tang, C., Huang, J., Cen, Z., & Xie, Z. (2025). Visual Detection on Aircraft Wing Icing Process Using a Lightweight Deep Learning Model. Aerospace, 12(7), 627. https://doi.org/10.3390/aerospace12070627