


STHFD: Spatial–Temporal Hypergraph-Based Model for Aero-Engine Bearing Fault Diagnosis



Abstract
1. Introduction
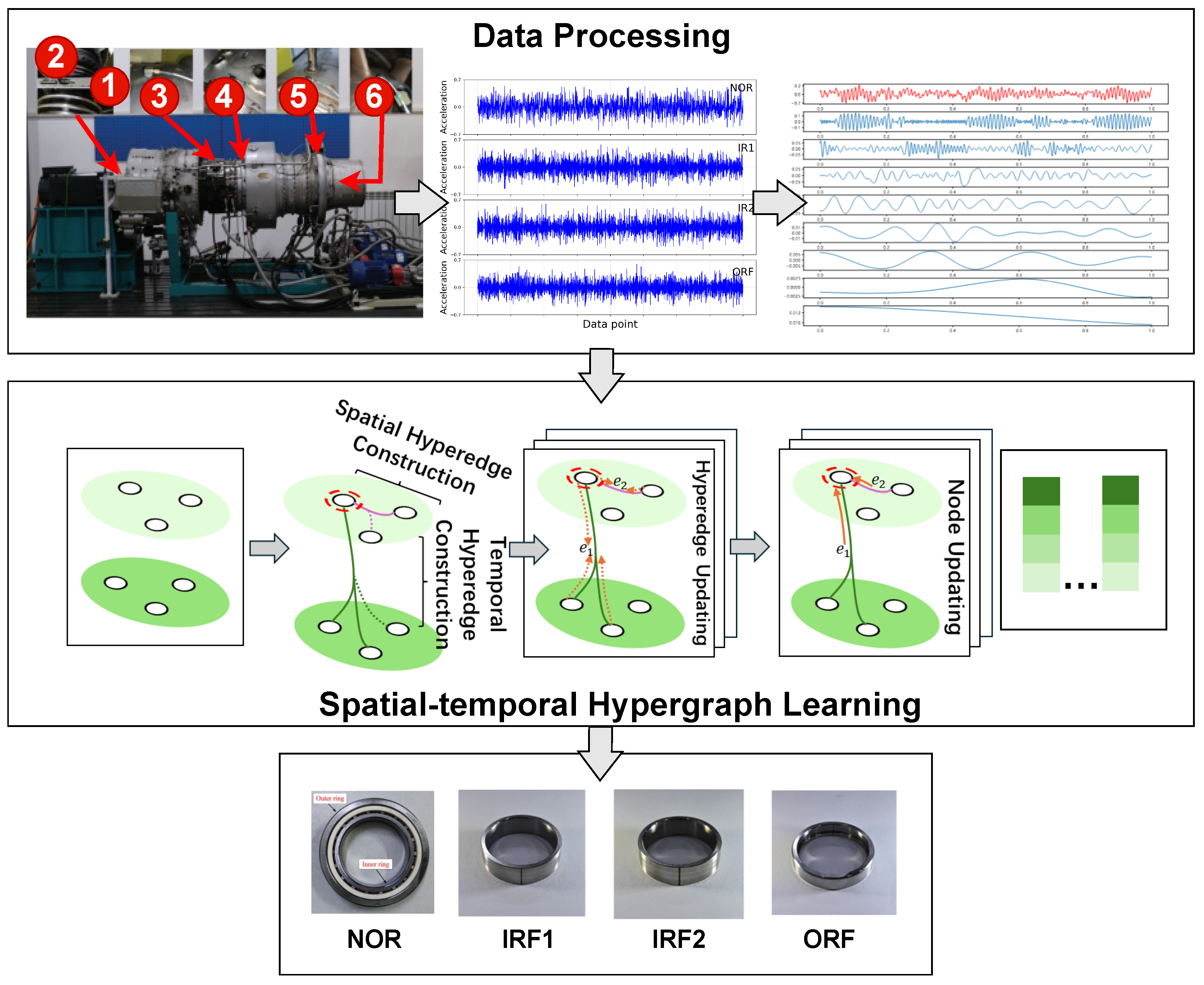
- We developed a fault diagnosis architecture that leverages hypergraphs to model high-order relationships among signal modalities. The framework supports dynamic hyperedge construction and incorporates a multi-head attention mechanism for updating node embeddings.
- A dedicated learning strategy is proposed to separately construct spatial and temporal hyperedges, allowing the framework to better represent complex dependencies in the data. The embedding update process captures both the heterogeneity and interactivity among signal nodes through attention-based aggregation.
- We evaluated the proposed STHFD framework on real-world aero-engine bearing datasets. The experimental results consistently show that our approach outperforms existing baseline models in fault classification tasks, demonstrating its robustness and practical potential.
2. Related Work
2.1. Traditional Learning Methods
2.2. Graph-Based Learning Methods
3. Methodology
3.1. Problem Definition
3.2. Dynamic Hypergraph Construction
3.3. Hypergraph Embedding Learning
3.3.1. Hyperedge Embedding
3.3.2. Multi-Head Attention for Node Updating
3.3.3. Graph Readout and Final Prediction
4. Experiments
- RQ1: How does the proposed STHFD model compare with existing baseline methods in terms of diagnostic accuracy and robustness?
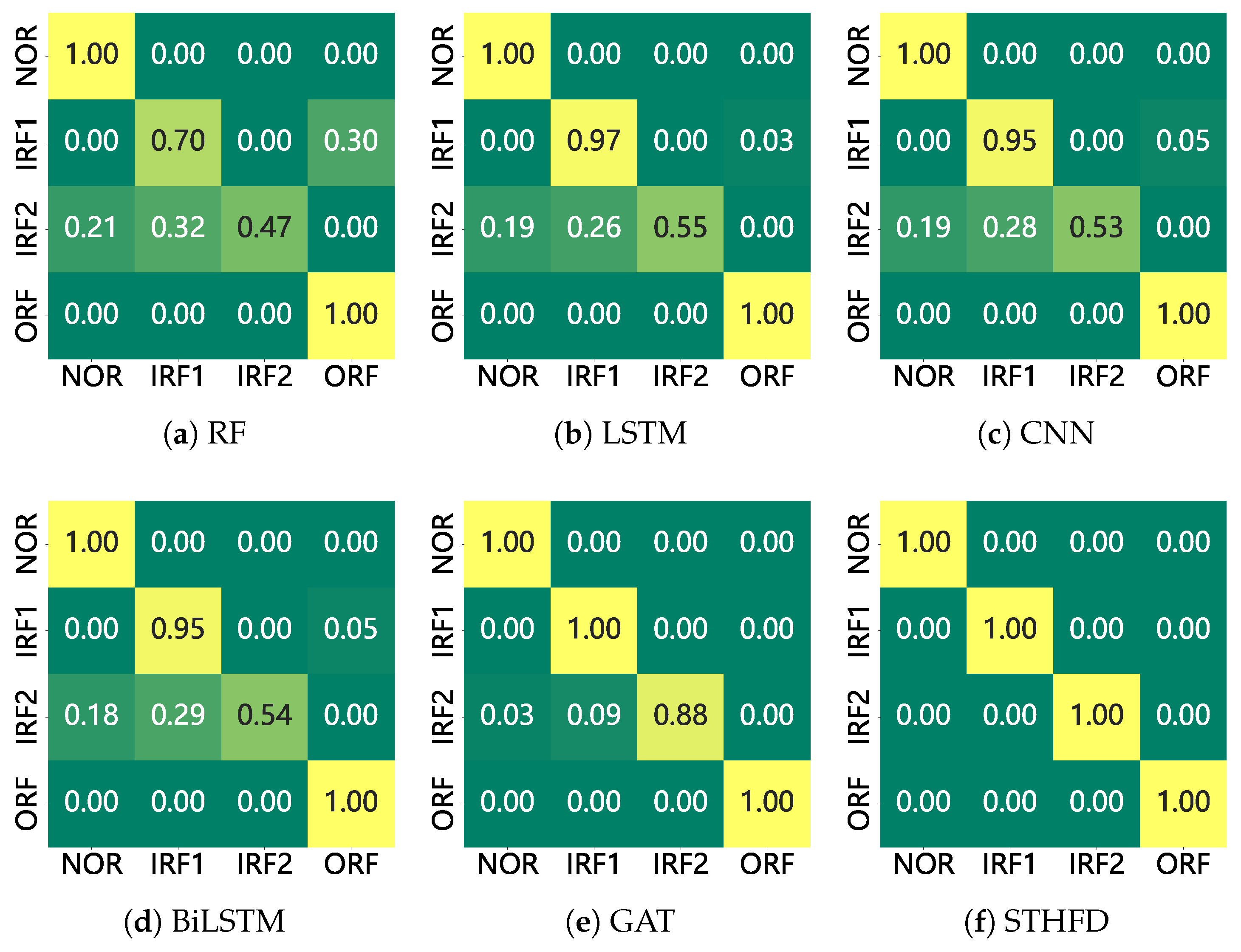
- RQ2: To what extent can different models distinguish between fault categories, and what are the common patterns of class-wise misclassification?
- RQ3: How does each component of the proposed model contribute to its overall performance?
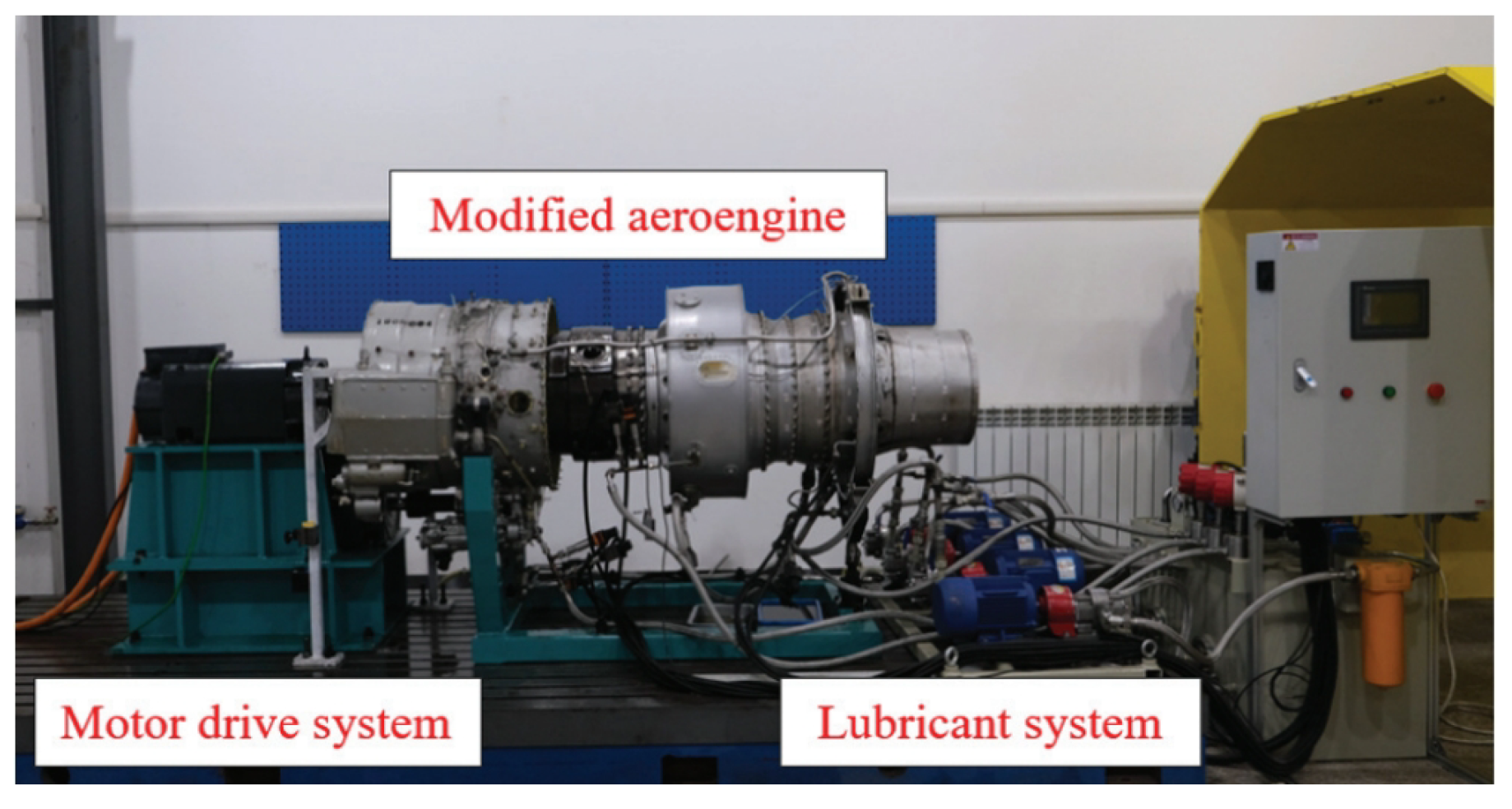
4.1. Dataset
4.2. Model Configuration
4.3. Comparison Methods
- (1) RF [30]: Random Forest, a widely used ensemble learning algorithm that constructs multiple decision trees and aggregates their predictions via majority voting.
- (2) CNN [31]: A 1D Convolutional Neural Network designed to capture local temporal patterns in vibration signals.
- (3) LSTM [31]: A Long Short-Term Memory network capable of modeling long-range temporal dependencies within sequential data.
- (4) BiLSTM [23]: A bidirectional variant of LSTM that processes a sequence in both forward and backward directions to enhance contextual feature learning.
- (5) GCN [32]: A Graph Convolutional Network that utilizes spatial graph structures constructed from sensor topology to model inter-channel dependencies.
4.4. Experiment Results and Analysis
4.4.1. Performance Comparison (RQ1)
4.4.2. Confusion Pattern Analysis (RQ2)
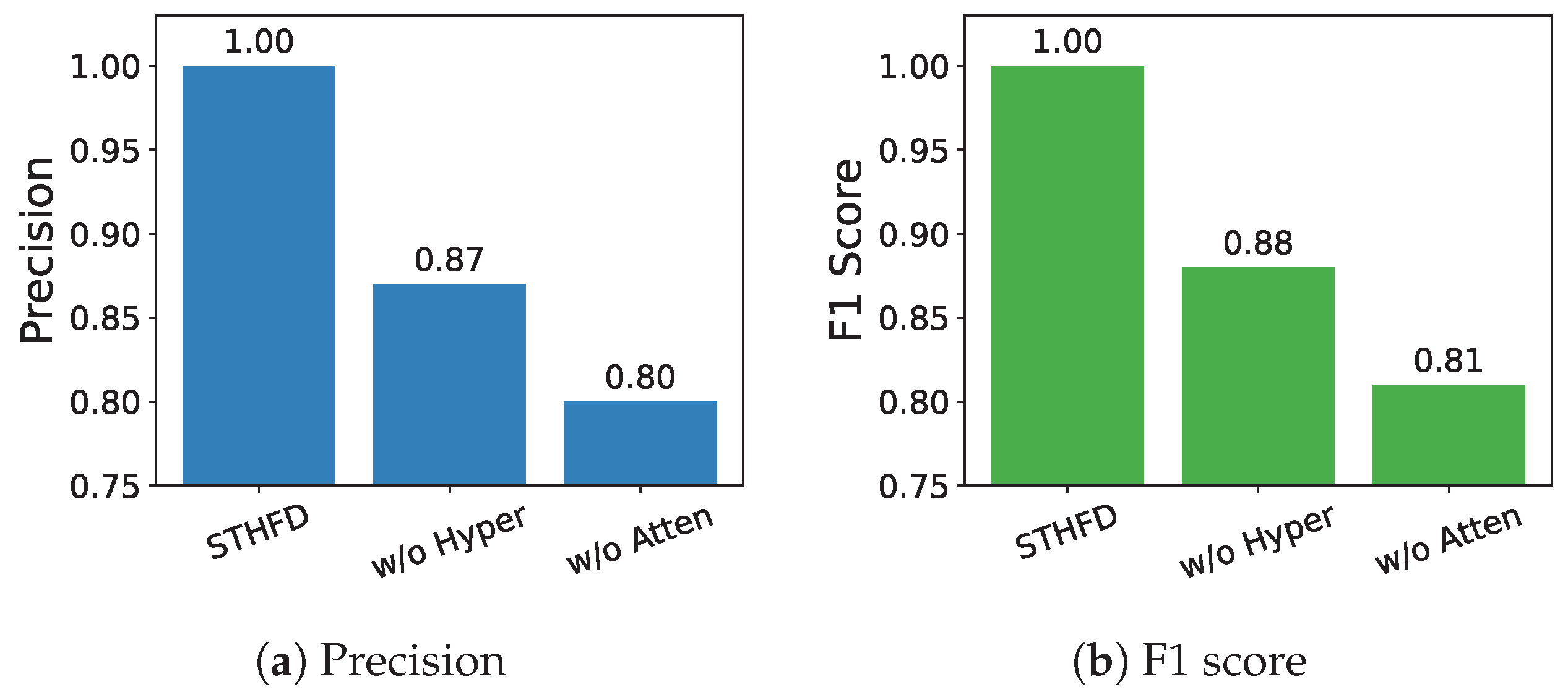
4.4.3. Ablation Study (RQ3)
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhao, D.; Cai, W.; Cui, L. Adaptive thresholding and coordinate attention-based tree-inspired network for aero-engine bearing health monitoring under strong noise. Adv. Eng. Inform. 2024, 61, 102559. [Google Scholar] [CrossRef]
- Wang, Z.; Luo, Q.; Chen, H.; Zhao, J.; Yao, L.; Zhang, J.; Chu, F. A high-accuracy intelligent fault diagnosis method for aero-engine bearings with limited samples. Comput. Ind. 2024, 159, 104099. [Google Scholar] [CrossRef]
- Chai, B.X.; Gunaratne, M.; Ravandi, M.; Wang, J.; Dharmawickrema, T.; Di Pietro, A.; Jin, J.; Georgakopoulos, D. Smart industrial internet of things framework for composites manufacturing. Sensors 2024, 24, 4852. [Google Scholar] [CrossRef] [PubMed]
- Hou, L.; Yi, H.; Jin, Y.; Gui, M.; Sui, L.; Zhang, J.; Chen, Y. Inter-shaft bearing fault diagnosis based on aero-engine system: A benchmarking dataset study. J. Dyn. Monit. Diagn. 2023, 2, 228–242. [Google Scholar] [CrossRef]
- Huang, T.; Zhang, Q.; Tang, X.; Zhao, S.; Lu, X. A novel fault diagnosis method based on CNN and LSTM and its application in fault diagnosis for complex systems. Artif. Intell. Rev. 2022, 55, 1289–1315. [Google Scholar] [CrossRef]
- Ruan, D.; Wang, J.; Yan, J.; Gühmann, C. CNN parameter design based on fault signal analysis and its application in bearing fault diagnosis. Adv. Eng. Inform. 2023, 55, 101877. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, S.; Bwar, K.; Eisenbart, B.; Lu, G.; Belaadi, A.; Fox, B.; Chai, B. Application of machine learning for composite moulding process modelling. Compos. Commun. 2024, 48, 101960. [Google Scholar] [CrossRef]
- Chai, B.; Eisenbart, B.; Nikzad, M.; Fox, B.; Blythe, A.; Bwar, K.H.; Wang, J.; Du, Y.; Shevtsov, S. Application of KNN and ANN Metamodeling for RTM filling process prediction. Materials 2023, 16, 6115. [Google Scholar] [CrossRef]
- Yu, Z.; Zhang, C.; Deng, C. An improved GNN using dynamic graph embedding mechanism: A novel end-to-end framework for rolling bearing fault diagnosis under variable working conditions. Mech. Syst. Signal Process. 2023, 200, 110534. [Google Scholar] [CrossRef]
- Hou, D.; Zhang, B.; Chen, J.; Shi, P. Improved GNN based on Graph-Transformer: A new framework for rolling mill bearing fault diagnosis. Trans. Inst. Meas. Control 2024, 46, 2804–2815. [Google Scholar] [CrossRef]
- Zhang, S.; Tong, H.; Xu, J.; Maciejewski, R. Graph convolutional networks: A comprehensive review. Comput. Soc. Netw. 2019, 6, 11. [Google Scholar] [CrossRef] [PubMed]
- Guo, L.; Shi, H.; Tan, S.; Song, B.; Tao, Y. A knowledge-driven spatial-temporal graph neural network for quality-related fault detection. Process. Saf. Environ. Prot. 2024, 184, 1512–1524. [Google Scholar] [CrossRef]
- Yang, C.; Zhou, K.; Liu, J. SuperGraph: Spatial-temporal graph-based feature extraction for rotating machinery diagnosis. IEEE Trans. Ind. Electron. 2021, 69, 4167–4176. [Google Scholar] [CrossRef]
- Wang, L.; Xie, F.; Zhang, X.; Jiang, L.; Huang, B. Spatial-temporal graph feature learning driven by time–frequency similarity assessment for robust fault diagnosis of rotating machinery. Adv. Eng. Inform. 2024, 62, 102711. [Google Scholar] [CrossRef]
- Wang, Z.; Tong, Y.; Heng, X. Phase-locking value based graph convolutional neural networks for emotion recognition. IEEE Access 2019, 7, 93711–93722. [Google Scholar] [CrossRef]
- Wang, J.; Jin, J.; Zhang, T.; Chai, B.X.; Di Pietro, A.; Georgakopoulos, D. Leveraging Auxiliary Task Relevance for Enhanced Bearing Fault Diagnosis through Curriculum Meta-learning. IEEE Sens. J. 2025, 25, 22467–22478. [Google Scholar] [CrossRef]
- Marzat, J.; Piet-Lahanier, H.; Damongeot, F.; Walter, E. Model-based fault diagnosis for aerospace systems: A survey. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2012, 226, 1329–1360. [Google Scholar] [CrossRef]
- Fekih, A. Fault diagnosis and fault tolerant control design for aerospace systems: A bibliographical review. In Proceedings of the 2014 American Control Conference, Portland, OR, USA, 4–6 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1286–1291. [Google Scholar]
- Wang, T.; Liu, Z.; Lu, G.; Liu, J. Temporal-spatio graph based spectrum analysis for bearing fault detection and diagnosis. IEEE Trans. Ind. Electron. 2020, 68, 2598–2607. [Google Scholar] [CrossRef]
- Li, D.; Wang, Y.; Wang, J.; Wang, C.; Duan, Y. Recent advances in sensor fault diagnosis: A review. Sens. Actuators A Phys. 2020, 309, 111990. [Google Scholar] [CrossRef]
- Zhu, J.; Jiang, Q.; Shen, Y.; Qian, C.; Xu, F.; Zhu, Q. Application of recurrent neural network to mechanical fault diagnosis: A review. J. Mech. Sci. Technol. 2022, 36, 527–542. [Google Scholar] [CrossRef]
- Wang, J.; Yang, S.; Liu, Y.; Wen, G. Deep subdomain transfer learning with spatial attention ConvLSTM network for fault diagnosis of wheelset bearing in high-speed trains. Machines 2023, 11, 304. [Google Scholar] [CrossRef]
- Nacer, S.M.; Nadia, B.; Abdelghani, R.; Mohamed, B. A novel method for bearing fault diagnosis based on BiLSTM neural networks. Int. J. Adv. Manuf. Technol. 2023, 125, 1477–1492. [Google Scholar] [CrossRef]
- Lv, H.; Chen, J.; Pan, T.; Zhang, T.; Feng, Y.; Liu, S. Attention mechanism in intelligent fault diagnosis of machinery: A review of technique and application. Measurement 2022, 199, 111594. [Google Scholar] [CrossRef]
- Duan, Y.; Yang, T.; Wang, C.; Zhang, Y.; Han, Q.; Guo, S. LSBT-Net: A lightweight framework for fault diagnosis of bearings based on an interpretable spatial-temporal model. Expert Syst. Appl. 2025, 281, 127718. [Google Scholar] [CrossRef]
- Kim, K.H.; Park, J.K. Application of hierarchical neural networks to fault diagnosis of power systems. Int. J. Electr. Power Energy Syst. 1993, 15, 65–70. [Google Scholar] [CrossRef]
- Lv, F.; Bi, X.; Xu, Z.; Zhao, J. Causality-embedded reconstruction network for high-resolution fault identification in chemical process. Process. Saf. Environ. Prot. 2024, 186, 1011–1033. [Google Scholar] [CrossRef]
- Li, C.; Mo, L.; Yan, R. Rotating machinery fault diagnosis based on spatial-temporal GCN. In Proceedings of the 2021 International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence (ICSMD), Nanjing, China, 21–23 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Wang, J.; Zhang, T.; Zhang, L.; Bai, Y.; Li, X.; Jin, J. HyperMAN: Hypergraph-enhanced Meta-learning Adaptive Network for Next POI Recommendation. arXiv 2025, arXiv:2503.22049. [Google Scholar]
- Yang, B.S.; Di, X.; Han, T. Random forests classifier for machine fault diagnosis. J. Mech. Sci. Technol. 2008, 22, 1716–1725. [Google Scholar] [CrossRef]
- Pan, H.; He, X.; Tang, S.; Meng, F. An improved bearing fault diagnosis method using one-dimensional CNN and LSTM. J. Mech. Eng./Stroj. Vestn. 2018, 64, 443–453. [Google Scholar]
- Li, C.; Mo, L.; Yan, R. Fault diagnosis of rolling bearing based on WHVG and GCN. IEEE Trans. Instrum. Meas. 2021, 70, 1–11. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Class | Metric | RF | LSTM | CNN | BiLSTM | GCN | STHFD |
|---|---|---|---|---|---|---|---|
| 1 | Precision | 0.8154 | 0.8167 | 0.8226 | 0.8413 | 0.9623 | 1.0000 |
| Recall | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | |
| F1-score | 0.8983 | 0.8991 | 0.9027 | 0.9138 | 0.9808 | 1.0000 | |
| 2 | Precision | 0.7000 | 0.8000 | 0.7838 | 0.9138 | 0.9242 | 1.0000 |
| Recall | 0.7000 | 0.9677 | 0.9508 | 0.9516 | 1.0000 | 1.0000 | |
| F1-score | 0.7000 | 0.8759 | 0.8593 | 0.8613 | 0.9606 | 1.0000 | |
| 3 | Precision | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 |
| Recall | 0.4737 | 0.5517 | 0.5345 | 0.5357 | 0.8793 | 1.0000 | |
| F1-score | 0.6429 | 0.7111 | 0.6966 | 0.5357 | 0.9358 | 1.0000 | |
| 4 | Precision | 0.7500 | 0.9649 | 0.9474 | 0.9464 | 1.0000 | 1.0000 |
| Recall | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | |
| F1-score | 0.8571 | 0.9821 | 0.9730 | 0.9725 | 1.0000 | 1.0000 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bao, P.; Yi, W.; Zhu, Y.; Shen, Y.; Chai, B.X. STHFD: Spatial–Temporal Hypergraph-Based Model for Aero-Engine Bearing Fault Diagnosis. Aerospace 2025, 12, 612. https://doi.org/10.3390/aerospace12070612
Bao P, Yi W, Zhu Y, Shen Y, Chai BX. STHFD: Spatial–Temporal Hypergraph-Based Model for Aero-Engine Bearing Fault Diagnosis. Aerospace. 2025; 12(7):612. https://doi.org/10.3390/aerospace12070612
Chicago/Turabian StyleBao, Panfeng, Wenjun Yi, Yue Zhu, Yufeng Shen, and Boon Xian Chai. 2025. "STHFD: Spatial–Temporal Hypergraph-Based Model for Aero-Engine Bearing Fault Diagnosis" Aerospace 12, no. 7: 612. https://doi.org/10.3390/aerospace12070612
APA StyleBao, P., Yi, W., Zhu, Y., Shen, Y., & Chai, B. X. (2025). STHFD: Spatial–Temporal Hypergraph-Based Model for Aero-Engine Bearing Fault Diagnosis. Aerospace, 12(7), 612. https://doi.org/10.3390/aerospace12070612