
Dynamics and Staged Deployment Strategy for a Spinning Tethered Satellite System

Abstract
1. Introduction
2. Dynamic Modeling of the STSS
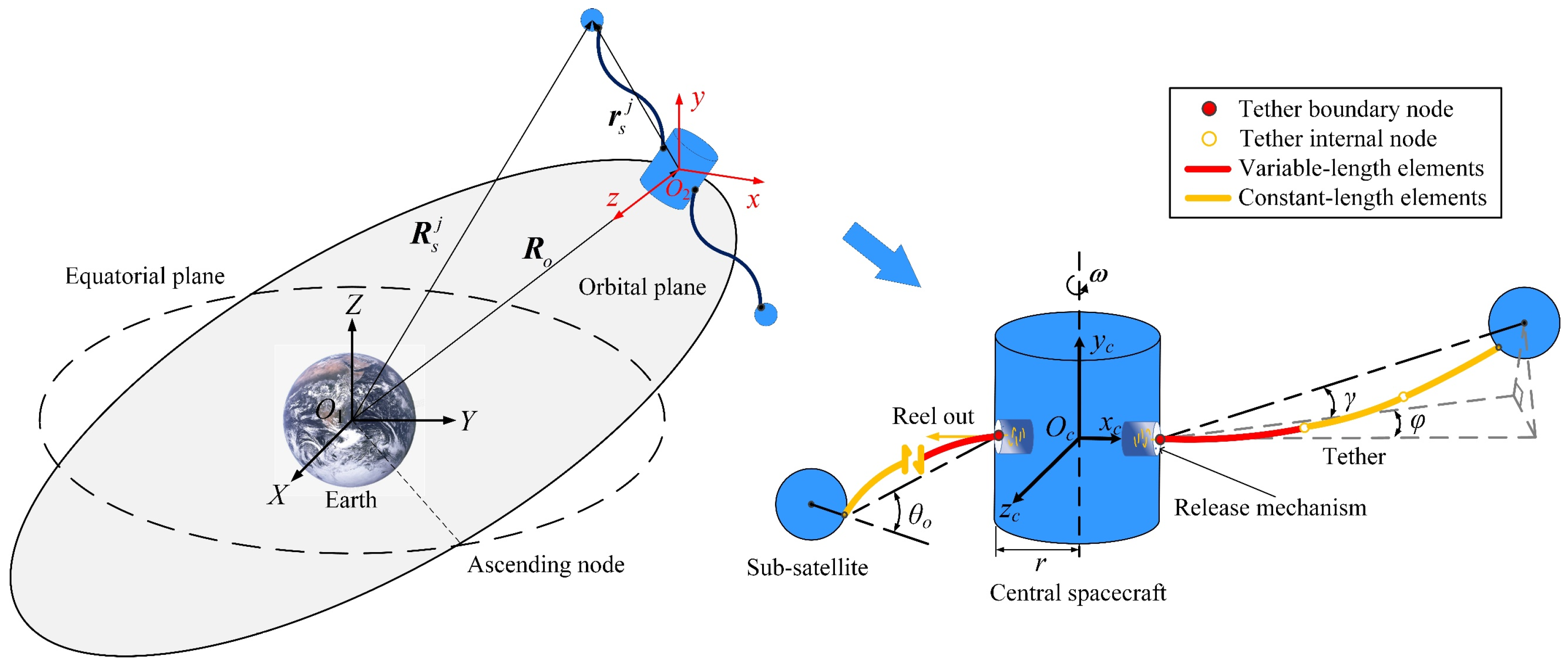
2.1. System Description
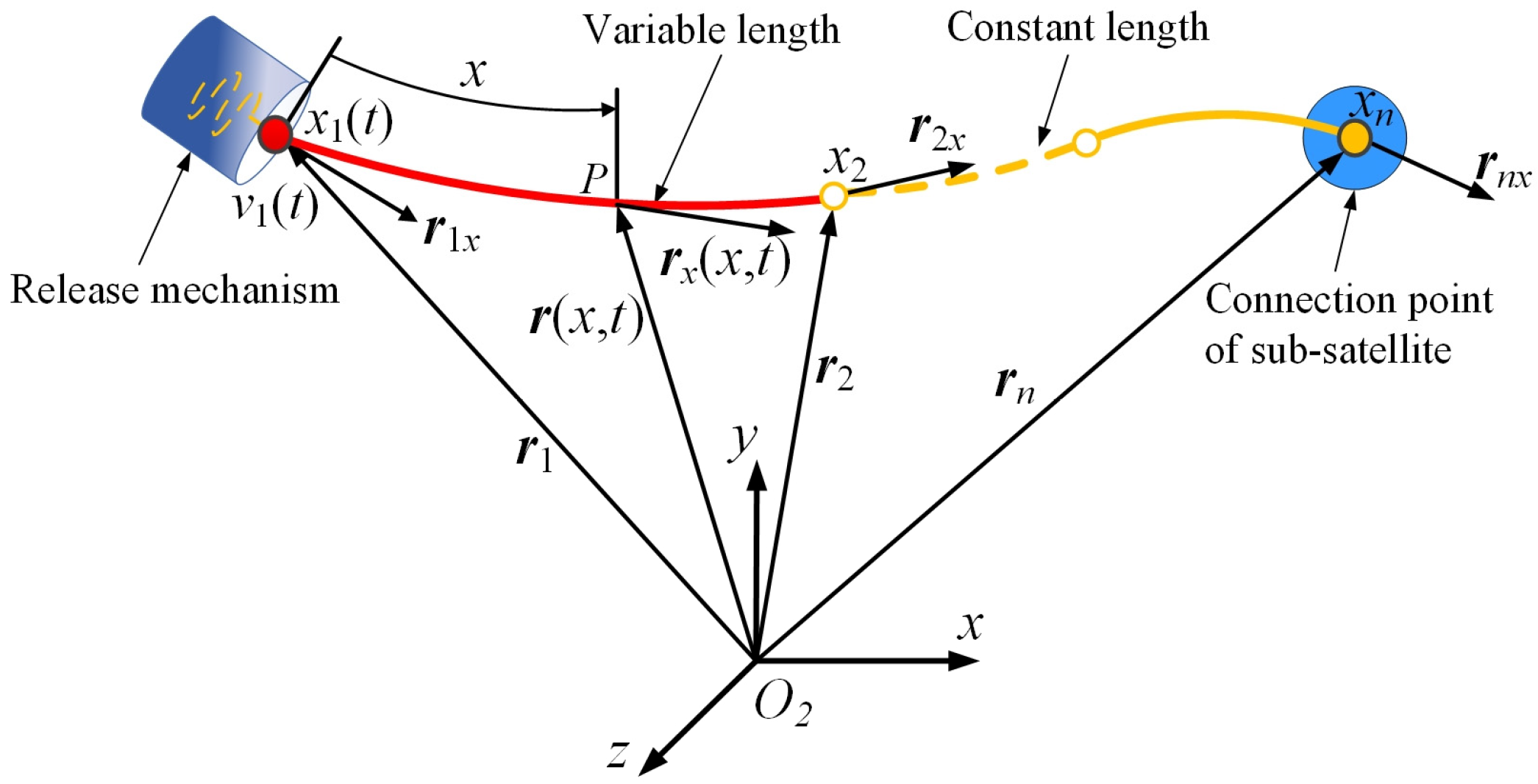
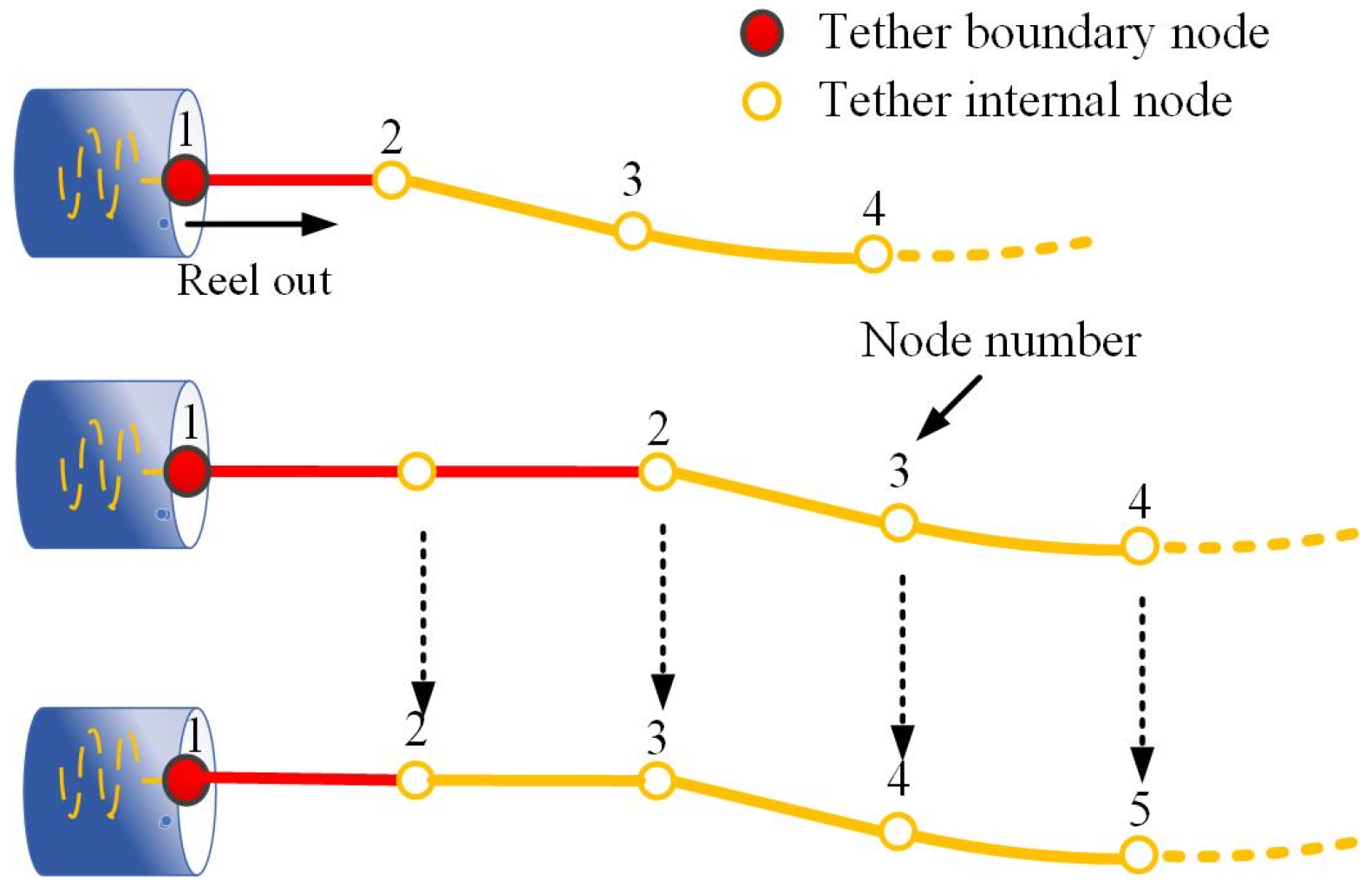
2.2. Dynamic Modeling of the Flexible Variable-Length Tether Element
2.3. Governing Equations of the Constrained Tether Multibody System
3. Staged Deployment Strategy
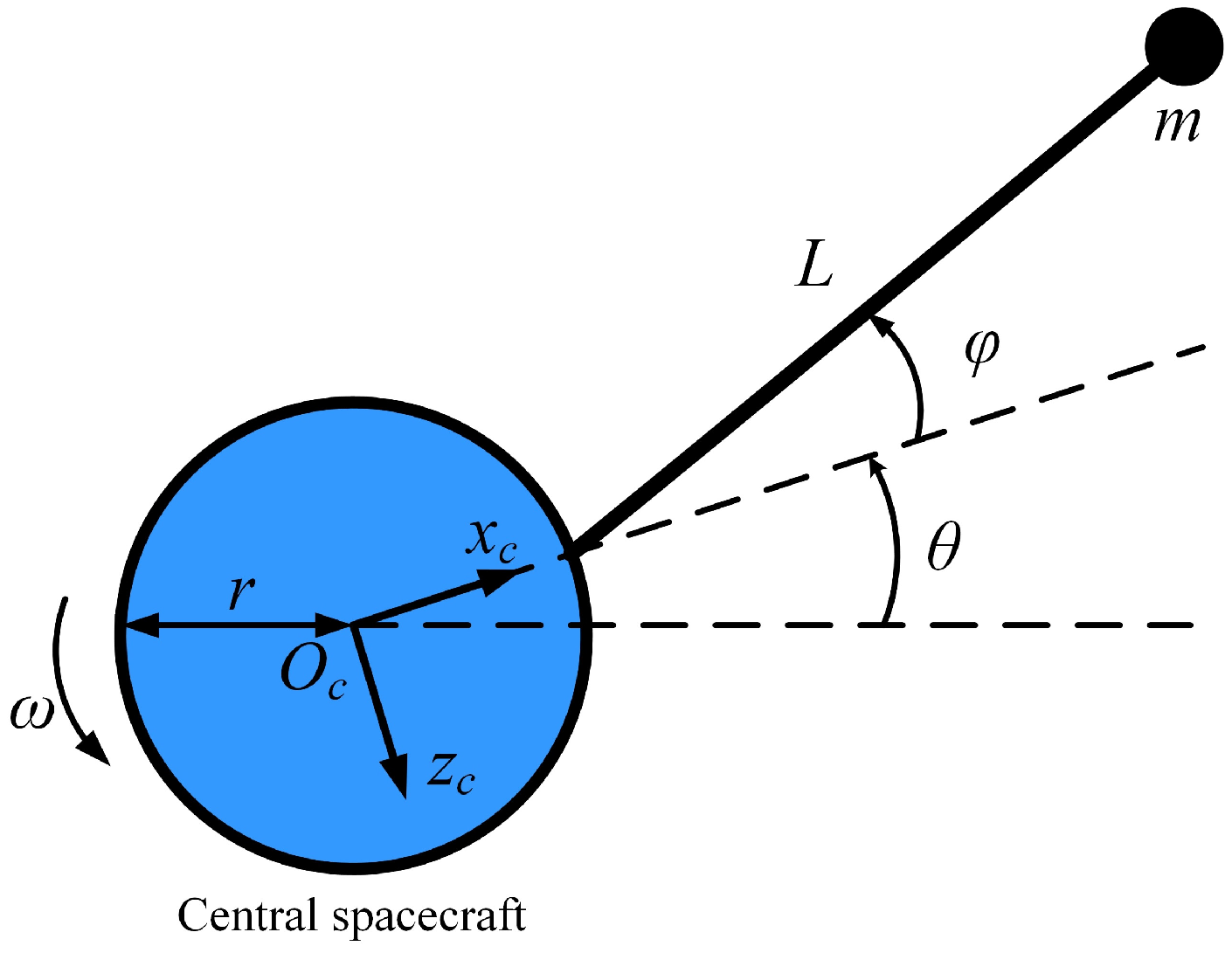
3.1. First Stage of Deployment
3.2. Second Stage of Deployment
4. Simulation and Analysis
4.1. Dynamic Model Validation
4.2. Single Sub-Satellite Configuration Without Space Environmental Forces
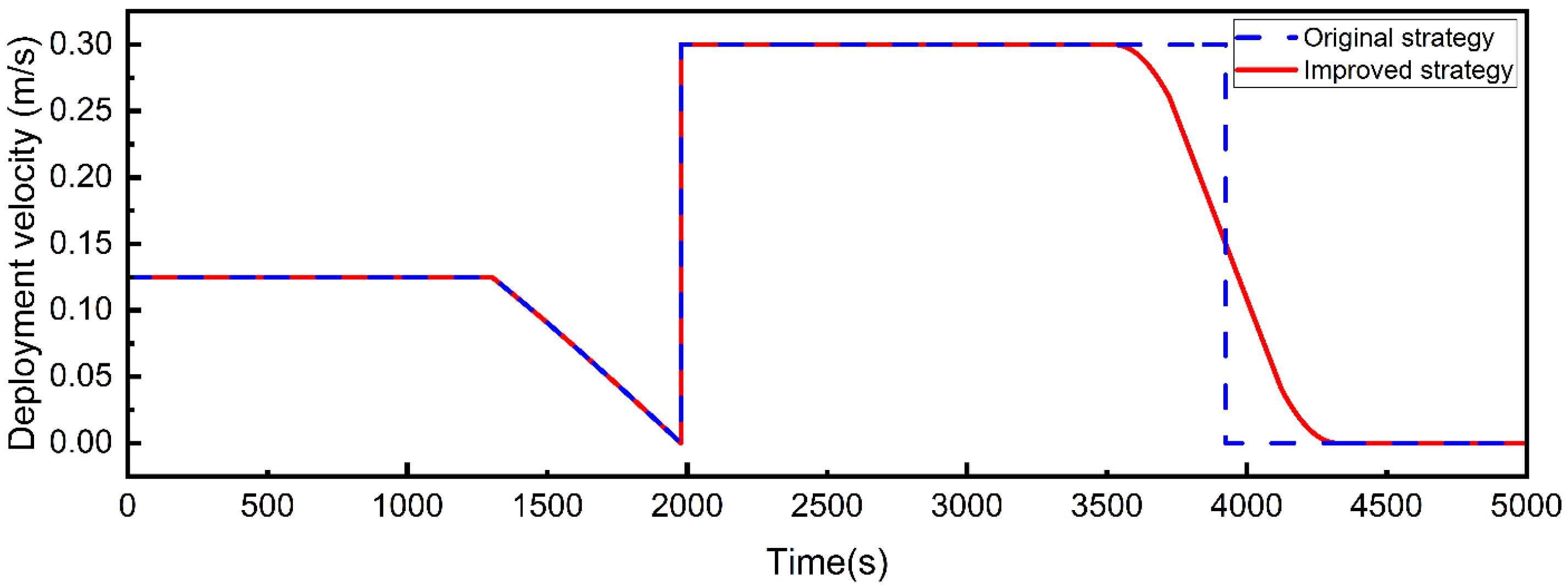
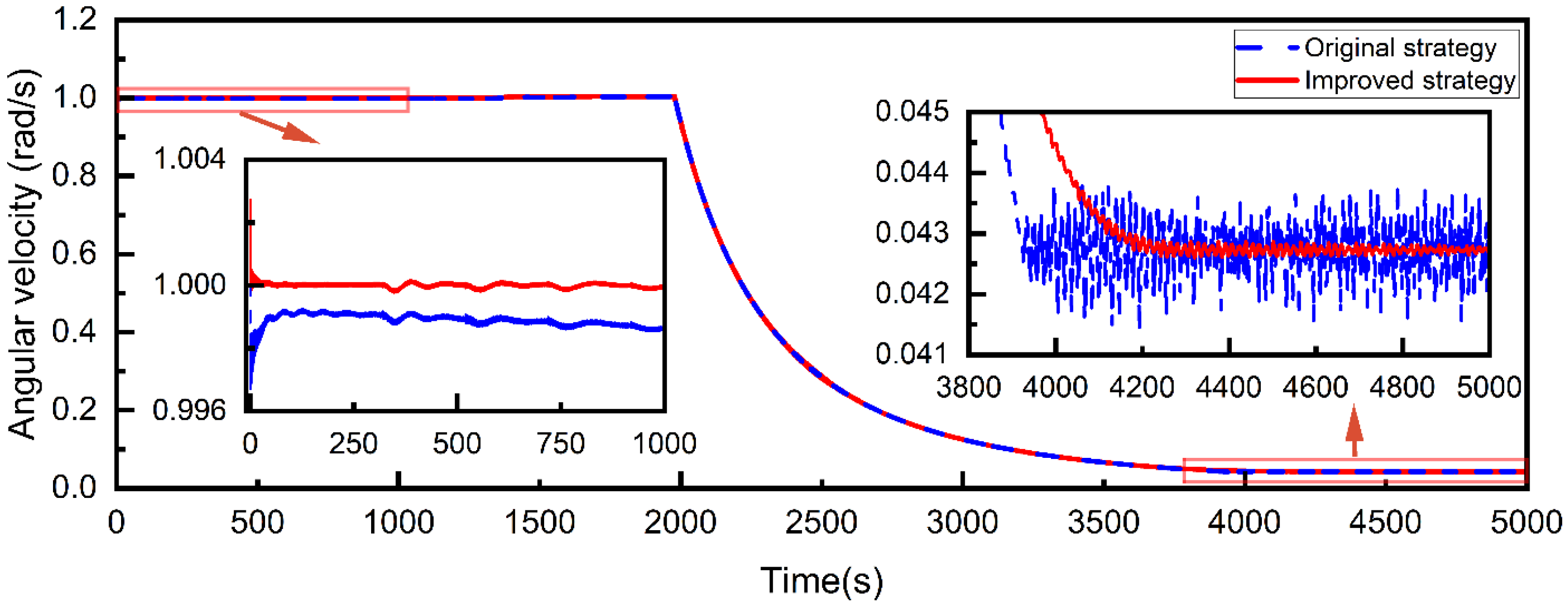
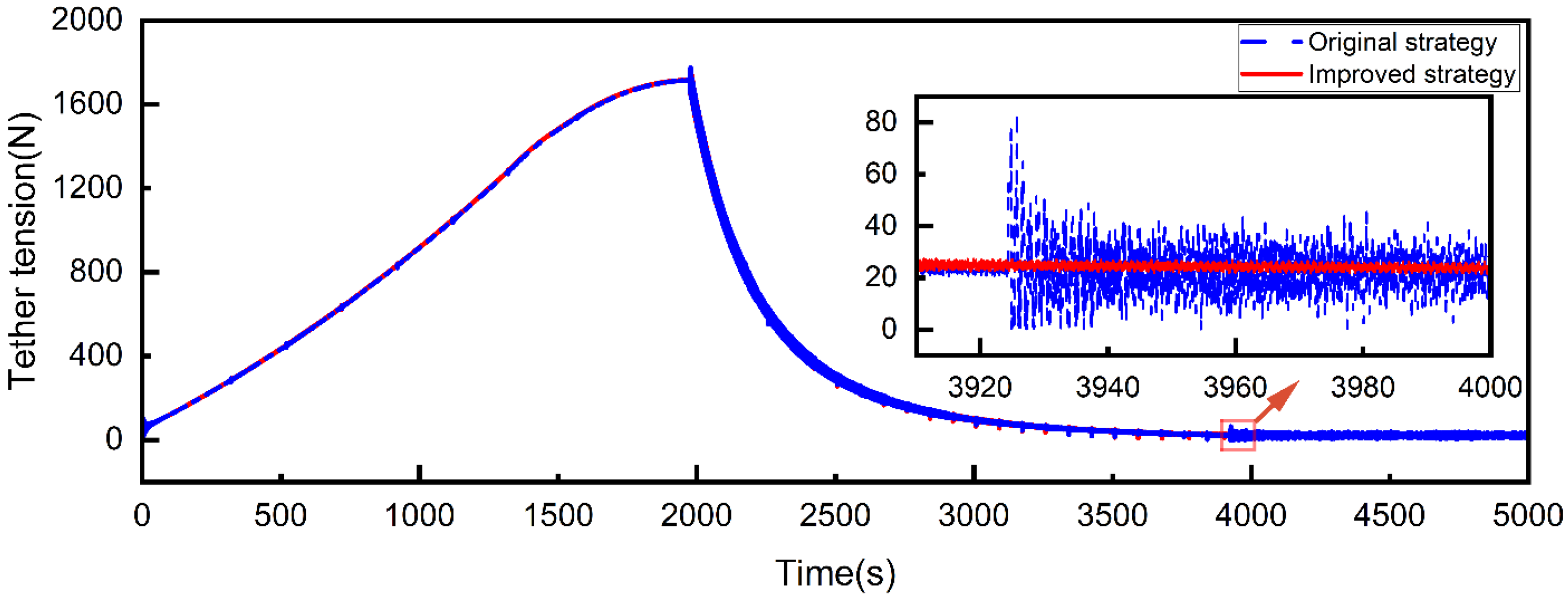
4.3. Single Sub-Satellite Configuration with an Improved Staged Deployment Strategy
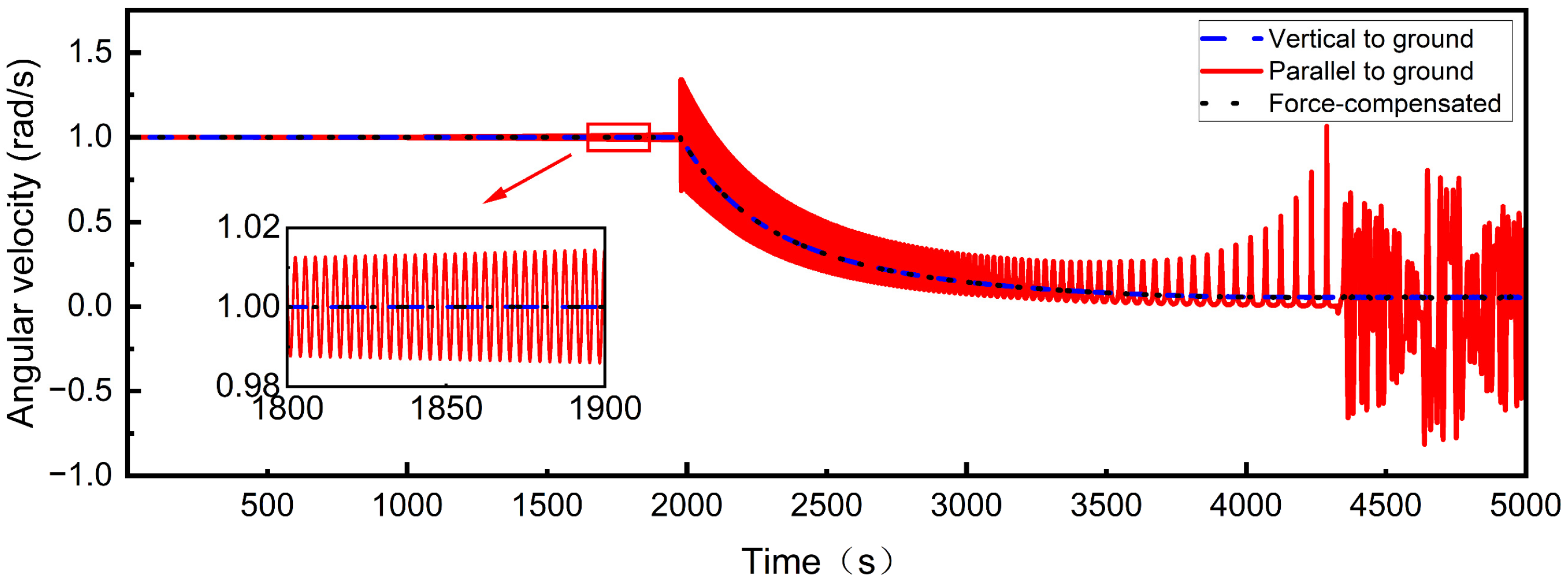
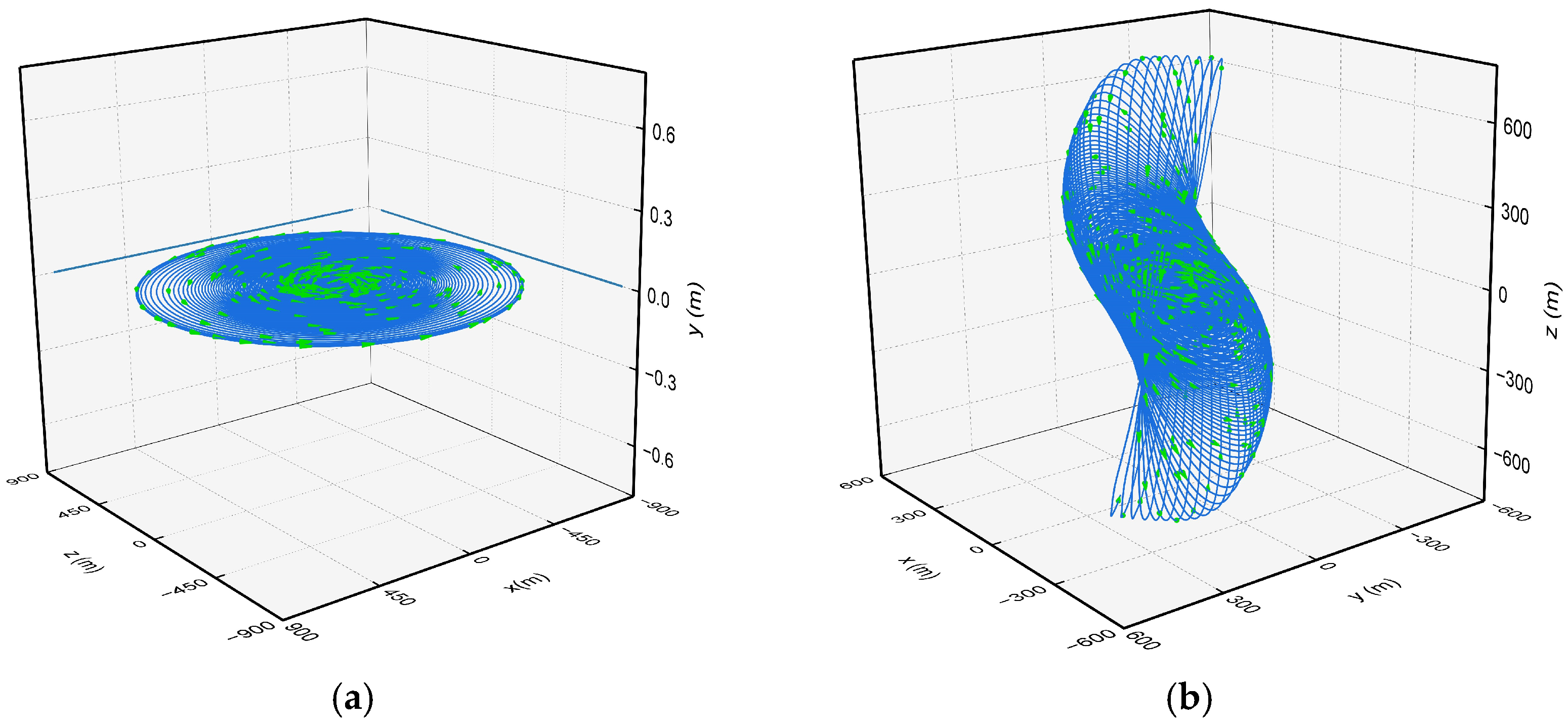
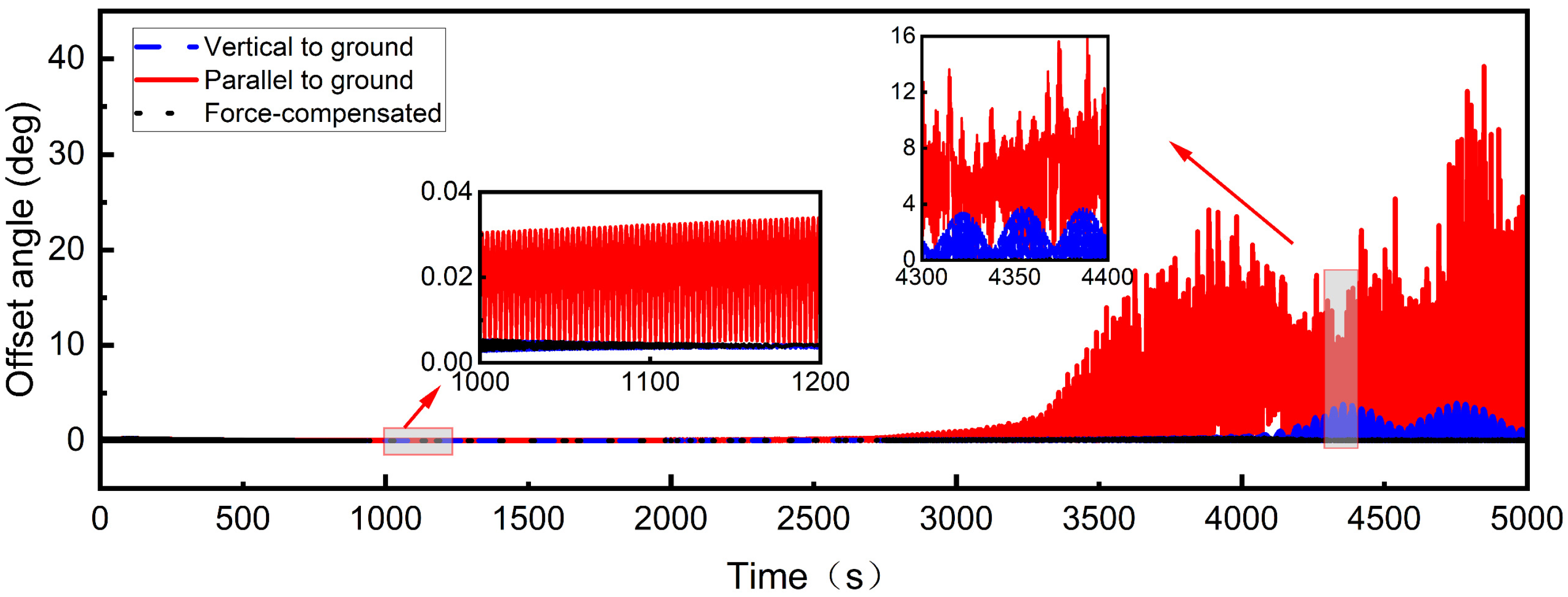
4.4. Twin Sub-Satellite Configuration Considering Space Environmental Forces
5. Conclusions
- (1)
- A multibody dynamic model is developed to analyze the nonlinear characteristics of the STSS deployment process, employing the ANCF within an ALE framework in conjunction with Lagrange multipliers. This model effectively captures the flexibility and length variation of the tether, as well as the attitude of the satellites. Both the gravitational gradient force and the Coriolis force are taken into account. Unlike the traditional massless/rigid rod model, the tether in this model is discretized into multiple flexible elements, accounting for both axial and bending deformations, thereby significantly enhancing the accuracy in characterizing the tether’s behavior.
- (2)
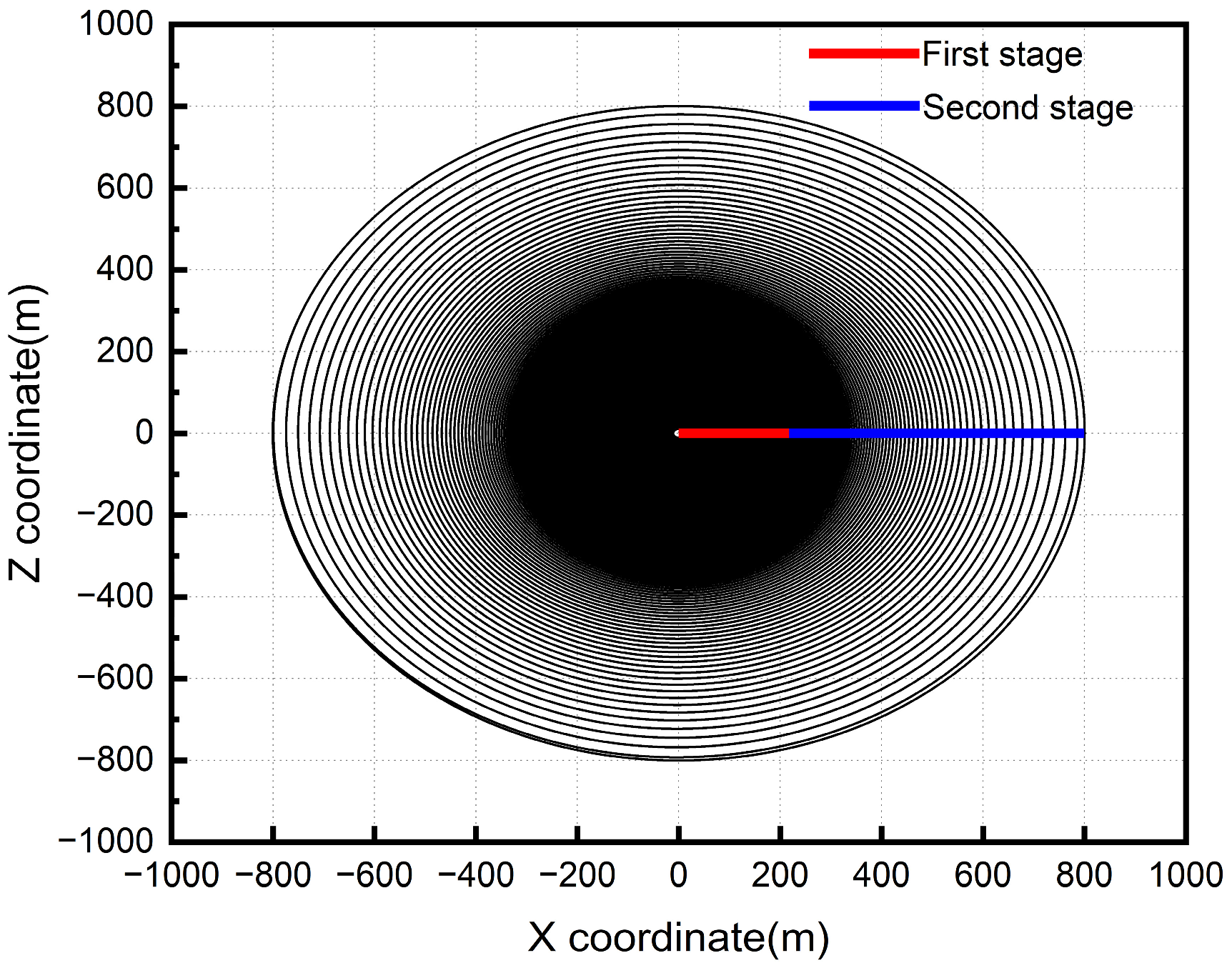
- A staged deployment control strategy based on safety tension division is proposed to address the problem of mutual restriction between high-speed spin and tether tension in the STSS. In the first stage, a high spinning angular velocity of the central spacecraft and the deployment velocity of the tether are planned to ensure deployment efficiency, and meanwhile eliminating the libration angle and oscillations in the STSS. Moreover, a method for calculating maximum tether tension is proposed to divide the deployment stage. When the tether tension exceeds the maximum critical value, the deployment enters the second stage. In this stage, the tether tension can be gradually reduced with the decrease of the spinning angular velocity of the STSS, which ensures the safety of the deployment process.
- (3)
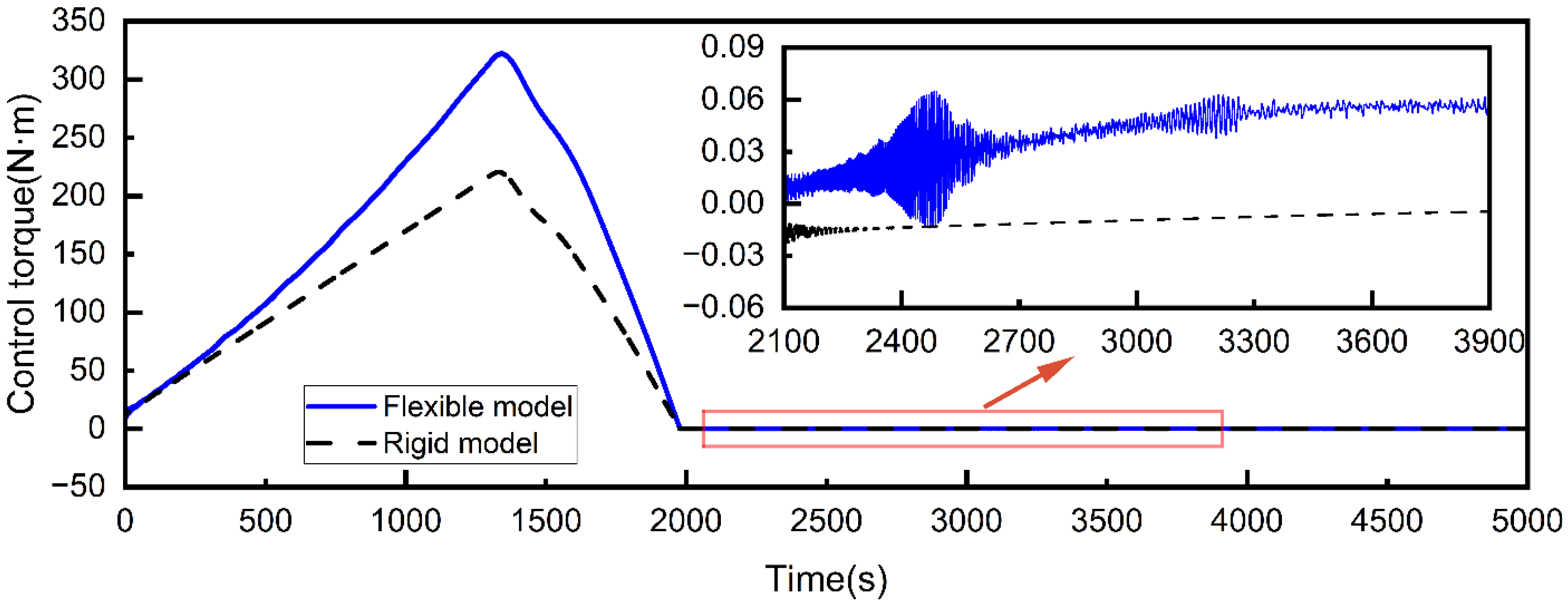
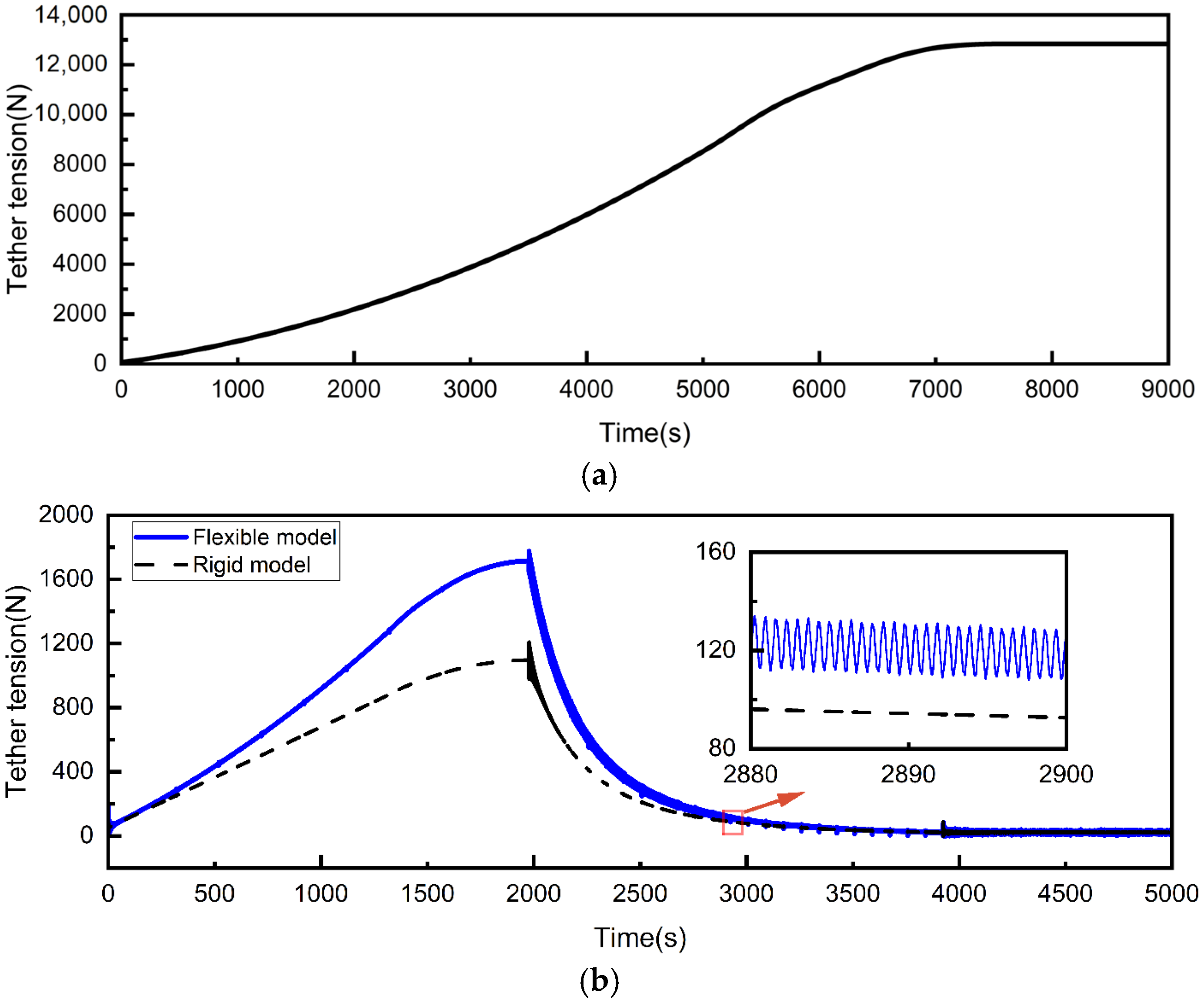
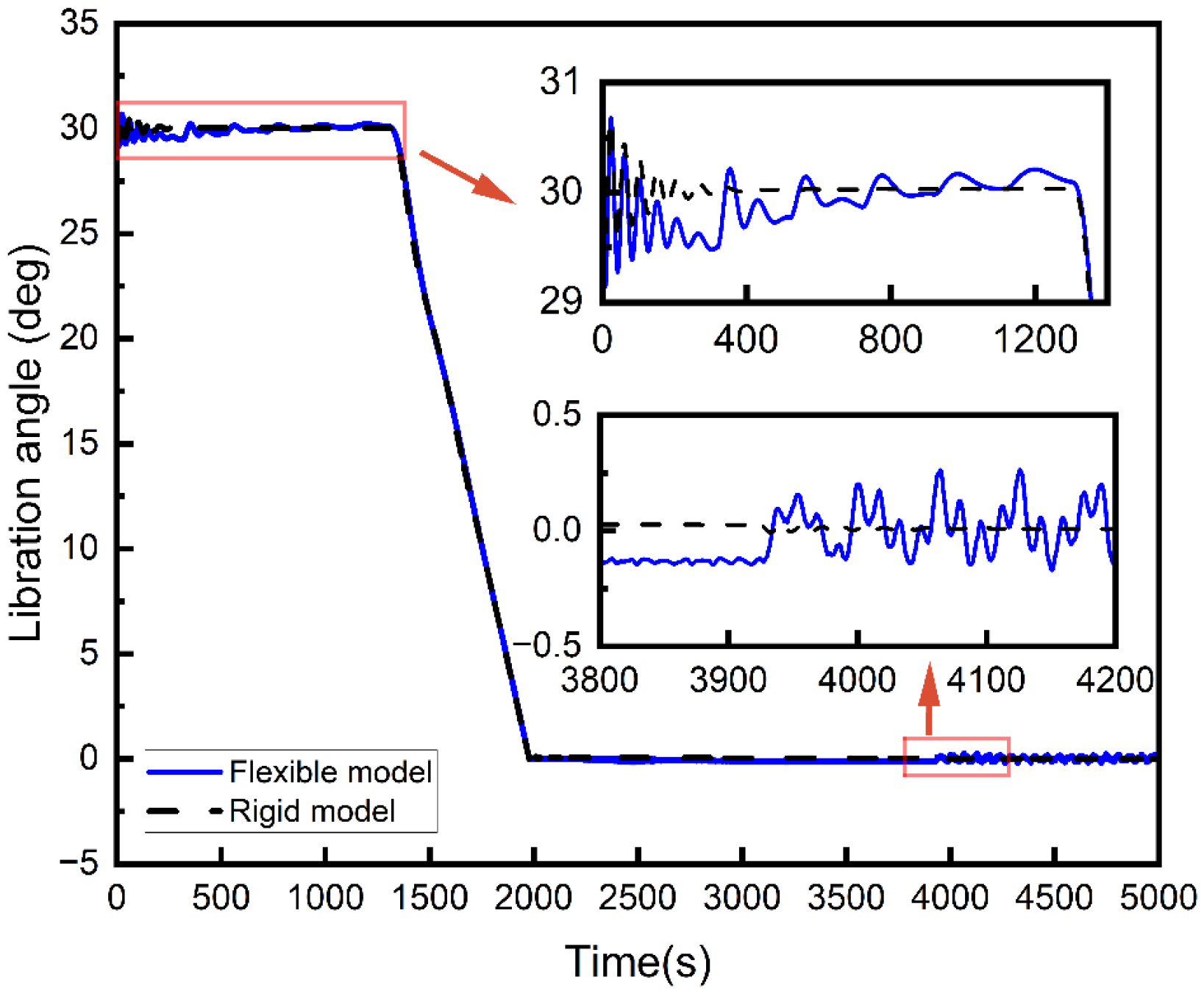
- Simulation results indicate that, when considering flexibility, the STSS exhibits greater oscillations in dynamic responses, such as libration angle and tether tension. Therefore, the application of the flexible model is essential to accurately reflect the vibration characteristics and dynamic behavior of the STSS. The accuracy of the dynamic model and the effectiveness of the proposed staged deployment strategy are demonstrated by numerical simulations, and torque compensation and deployment velocity transitions are introduced to mitigate libration angle fluctuations, thereby optimizing the dynamic performance of the STSS during deployment. Furthermore, the analysis of deployment dynamics under space environmental forces reveals that, while the STSS in vertical-to-ground orientation remains stable, the STSS in parallel-to-ground orientation experiences significant instabilities, reflected in fluctuations of the libration angle, out-of-plane angle, and attitude of the satellites. These instabilities can be effectively mitigated through space force compensation.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Huang, P.; Zhang, F.; Chen, L.; Meng, Z.; Zhang, Y.; Liu, Z.; Hu, Y. A review of space tether in new applications. Nonlinear Dyn. 2018, 94, 1–19. [Google Scholar] [CrossRef]
- Ma, Y.; Ge, R.; Xu, M. Design concept of a tethered satellite cluster system. Aerosp. Sci. Technol. 2020, 106, 106159. [Google Scholar] [CrossRef]
- Selva, D.; Golkar, A.; Korobova, O.; i Cruz, I.L.; Collopy, P.; de Weck, O.L. Distributed Earth Satellite Systems: What Is Needed to Move Forward? J. Aerosp. Inf. Syst. 2017, 14, 412–438. [Google Scholar] [CrossRef]
- Lu, H.; Li, A.; Wang, C.; Zabolotnov, Y.M. Tether Deformation of Spinning Electrodynamic Tether System and Its Suppression with Optimal Controller. J. Aerosp. Eng. 2021, 34, 04021003. [Google Scholar] [CrossRef]
- Shan, M.; Shi, L. Comparison of Tethered Post-Capture System Models for Space Debris Removal. Aerospace 2022, 9, 33. [Google Scholar] [CrossRef]
- Jiang, X.; Bai, Z. Dynamic analysis of the tethered satellite system considering uncertain but bounded parameters. Def. Technol. 2024, 42, 116–124. [Google Scholar] [CrossRef]
- Misra, A.K.; Nixon, M.S.; Modi, V.J. Nonlinear Dynamics of Two-Body Tethered Satellite Systems: Constant Length Case. J. Astronaut. Sci. 2001, 49, 219–236. [Google Scholar] [CrossRef]
- Luo, C.; Wen, H.; Jin, D.; Xu, S. Long-term deorbiting control for an electrodynamic tether system exploiting periodic solutions. Acta Astronaut. 2023, 202, 174–185. [Google Scholar] [CrossRef]
- Beletsky, V.; Kasatkin, G.; Starostin, E. The pendulum as a dynamical billiard. Chaos Solitons Fractals 1996, 7, 1145–1178. [Google Scholar] [CrossRef]
- Hongshi, L.; Hang, Y.; Changqing, W.; Aijun, L. Nonlinear deformation and attitude control for spinning electrodynamic tether systems during spin-up stage. Nonlinear Dyn. 2024, 112, 7011–7027. [Google Scholar] [CrossRef]
- No, T.S.; Cochran, J.E. Dynamics and Control of a Tethered Flight Vehicle. J. Guid. Control. Dyn. 1995, 18, 66–72. [Google Scholar] [CrossRef]
- Fotland, G.; Haugen, B. Numerical integration algorithms and constraint formulations for an ALE-ANCF cable element. Mech. Mach. Theory 2022, 170, 104659. [Google Scholar] [CrossRef]
- Escalona, J.L. An arbitrary lagrangian–eulerian discretization method for modeling and simulation of reeving systems in multibody dynamics. Mech. Mach. Theory 2017, 112, 1–21. [Google Scholar] [CrossRef]
- Sun, J.; Tian, Q.; Hu, H.; Pedersen, N.L. Simultaneous topology and size optimization of a 3D variable-length structure described by the ALE–ANCF. Mech. Mach. Theory 2018, 129, 80–105. [Google Scholar] [CrossRef]
- Shabana, A.A. Flexible multibody dynamics: Review of past and recent developments. Multibody Syst. Dyn. 1997, 1, 189–222. [Google Scholar] [CrossRef]
- Shan, M.; Guo, J.; Gill, E. Deployment dynamics of tethered-net for space debris removal. Acta Astronaut. 2017, 132, 293–302. [Google Scholar] [CrossRef]
- Tang, J.; Ren, G.; Zhu, W.; Ren, H. Dynamics of variable-length tethers with application to tethered satellite deployment. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 3411–3424. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiang, X.; Bai, Z.-F.; Guo, J.-W.; Wei, C. Dynamics and rebound behavior analysis of flexible tethered satellite system in deployment and station-keeping phases. Def. Technol. 2022, 18, 509–523. [Google Scholar] [CrossRef]
- Wang, R.; Wei, C.; Wu, Y.; Zhao, Y. The Study of Spin Control of Flexible Electric Sail Using the Absolute Nodal Coordinate Formulation. In Proceedings of the 2017 IEEE International Conference on Cybernetics and Intelligent Systems (CIS) and IEEE Conference on Robotics, Automation and Mechatronics (RAM), Ningbo, China, 19–21 November 2017; IEEE: New York, NY, USA, 2017; pp. 785–790. [Google Scholar]
- Luo, C.; Sun, J.; Wen, H.; Jin, D. Dynamics of a tethered satellite formation for space exploration modeled via ANCF. Acta Astronaut. 2020, 177, 882–890. [Google Scholar] [CrossRef]
- Sun, J.; Chen, E.; Chen, T.; Jin, D. Spin dynamics of a long tethered sub-satellite system in geostationary orbit. Acta Astronaut. 2022, 195, 12–26. [Google Scholar] [CrossRef]
- Du, C.; Zhu, Z.H. Dynamic characterization and sail angle control of electric solar wind sail by high-fidelity tether dynamics. Acta Astronaut. 2021, 189, 504–513. [Google Scholar] [CrossRef]
- Trushlyakov, V.I.; Yudintsev, V.V. Rotary space tether system for active debris removal. J. Guid. Control Dyn. 2020, 43, 354–364. [Google Scholar] [CrossRef]
- Tragesser, S.G.; Gorjidooz, B. Open-loop spinup and deployment control of a tether sling. J. Spacecr. Rocket. 2010, 47, 345–352. [Google Scholar] [CrossRef]
- Huang, P.; Zhao, Y.; Zhang, F.; Ma, J.; Meng, Z.; Liu, Z.; Zhang, Y. Deployment/retraction of the rotating Hub-Spoke Tethered Formation System. Aerosp. Sci. Technol. 2017, 69, 495–503. [Google Scholar] [CrossRef]
- Zhai, G.; Su, F.; Zhang, J.; Liang, B. Deployment strategies for planar multi-tethered satellite formation. Aerosp. Sci. Technol. 2017, 71, 475–484. [Google Scholar] [CrossRef]
- Fulton, J.; Schaub, H. Fixed-axis electric sail deployment dynamics analysis using hub-mounted momentum control. Acta Astronaut. 2018, 144, 160–170. [Google Scholar] [CrossRef]
- Liu, C.; Wang, W.; Kang, J.; Zhu, Z.H. Spin deployment of Hub-Spoke tethered satellite formation with sliding mode tether tension control. Adv. Space Res. 2023, 71, 2509–2520. [Google Scholar] [CrossRef]
- Su, F.; Zhai, G.; Zhang, J.; Zhang, Y. Dynamics and control during spinning deployment for hub-and-spoke configured multi-tethered satellite formation. Hangkong Xuebao/Acta Aeronaut. Et Astronaut. Sinica. 2016, 37, 2809–2819. [Google Scholar]
- Li, G.; Zhu, Z.H.; Du, C. Stability and control of radial deployment of electric solar wind sail. Nonlinear Dyn. 2021, 103, 481–501. [Google Scholar] [CrossRef]
- Rogers, G.D.; Kinnison, J.D.; Brandt, P.C.; Cocoros, A.A.; Paul, M.V. Dynamic Challenges of Long Flexible Booms on a Spinning Outer Heliospheric Spacecraft. In Proceedings of the 2021 IEEE Aerospace Conference (50100), Big Sky, MT, USA, 6–13 March 2021; IEEE: New York, NY, USA, 2021; pp. 1–11. [Google Scholar]
- Shabana, A.A. Dynamics of Multibody Systems; Cambridge University Press: Cambridge, UK, 2020. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Units |
|---|---|---|
| Principal inertia of central spacecraft | (200, 200, 200) | kg·m2 |
| Principal inertia of sub-satellite | (0.02, 0.02, 0.02) | kg·m2 |
| Mass of central spacecraft | 1500 | kg |
| Mass of sub-satellite | 5 | kg |
| Radius of central spacecraft | 0.5 | m |
| Linear density of tether | 0.02607 | kg/m |
| Diameter of tether | 2 | mm |
| Elastic modulus of tether | 128 | GPa |
| Tensile strength of tether | 827 | MPa |
| Total tether length | 800 | m |
| Threshold length of tether element | 50 | m |
| Initial spinning angular velocity | 1 | rad/s |
| Initial libration angle | π/6 | rad |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Y.; Chen, K.; Guo, J.; Wei, C. Dynamics and Staged Deployment Strategy for a Spinning Tethered Satellite System. Aerospace 2025, 12, 611. https://doi.org/10.3390/aerospace12070611
Zhang Y, Chen K, Guo J, Wei C. Dynamics and Staged Deployment Strategy for a Spinning Tethered Satellite System. Aerospace. 2025; 12(7):611. https://doi.org/10.3390/aerospace12070611
Chicago/Turabian StyleZhang, Yue, Kai Chen, Jiawen Guo, and Cheng Wei. 2025. "Dynamics and Staged Deployment Strategy for a Spinning Tethered Satellite System" Aerospace 12, no. 7: 611. https://doi.org/10.3390/aerospace12070611
APA StyleZhang, Y., Chen, K., Guo, J., & Wei, C. (2025). Dynamics and Staged Deployment Strategy for a Spinning Tethered Satellite System. Aerospace, 12(7), 611. https://doi.org/10.3390/aerospace12070611