

Urban Air Mobility Vertiport’s Capacity Simulation and Analysis

Abstract
1. Introduction
2. Literature Review
3. Urban Air Mobility Challenges
3.1. Technical and Infrastructural Challenges
- High Air Traffic Density: The introduction of many UASs creates an unprecedented intensity in urban airspace. Each UAS contributes to the overall traffic load, potentially increasing collision risks and introducing complexities in airspace management, especially where they coexist with conventional aircraft [14,15,19,20,21].
- Advanced Hardware and Communication Systems: Seamless and safe UAS operation demands highly reliable hardware systems. This includes redundant monitoring systems, robust control algorithms, and state-of-the-art sensor arrays that track the position, status, and potential anomalies in real time. The integration of these components is central to ensuring that UASs can safely execute their missions even in busy air corridors [15,22,23].
- Safety Protocols: Safety is the cornerstone of any UAM system. Both physical and cyber safety measures must be prioritized. Physical safety protocols focus on minimizing risks of mid-air collisions and system failures, while cybersecurity protocols are vital for protecting the UAS against potential hacking or system intrusions. Rapid response strategies and real-time monitoring systems are essential components of a safe and resilient UAM network [14,15,23,24,25,26].
- Noise Management: With UASs potentially operating around the clock, the noise generated by their engines and rotors can become a serious concern for urban inhabitants. Engineers and urban planners must collaborate to develop noise-reduction technologies, such as quieter propulsion systems and optimized flight paths, and designate operational zones that keep disruptive noise away from residential areas [14,15,27,28,29].
- Air Traffic Management: Integrating UAS operations into existing air traffic systems requires a sophisticated coordination mechanism. New traffic management algorithms grounded in artificial intelligence can bridge the gap between traditional air traffic control measures and the dynamic requirements of a densely populated UAS network. This integrated approach ensures that all aerial vehicles operate harmoniously and safely [14,15,19,26].
3.2. Safety as the Cornerstone of UAM
3.3. Managing Air Traffic and Operational Infrastructure
3.4. Environmental Impact and Noise Considerations
- Technological Innovation: Developing quieter propulsion systems and aerodynamic designs is crucial for reducing noise emissions.
- Urban Zoning: Careful planning to assign UAS operation zones away from densely populated residential areas can help mitigate adverse noise impacts.
3.5. Vertiport Analysis: Capacity and New Definitions
- Infrastructure Sizing: Determining optimal dimensions and the spatial layout for smaller vertiports that align with the operational needs of tiny UASs.
- Operational Throughput: Calculating the maximum number of simultaneous operations that a given vertiport can safely handle, taking into account rigorous safety protocols and efficient turnaround processes.
4. Research Objectives
5. Methodology
- Grid-based placement: UASs are positioned on a grid within a circular vertiport to avoid collisions.
- Finite state machines: UASs switch between ground and air states depending on timers.
- Service modeling: Turnaround times are assigned based on UAS and operation types.
- Randomized missions: Flight times are randomized within realistic bounds.
- Dynamic updates: Visualization and UAS states update continuously.
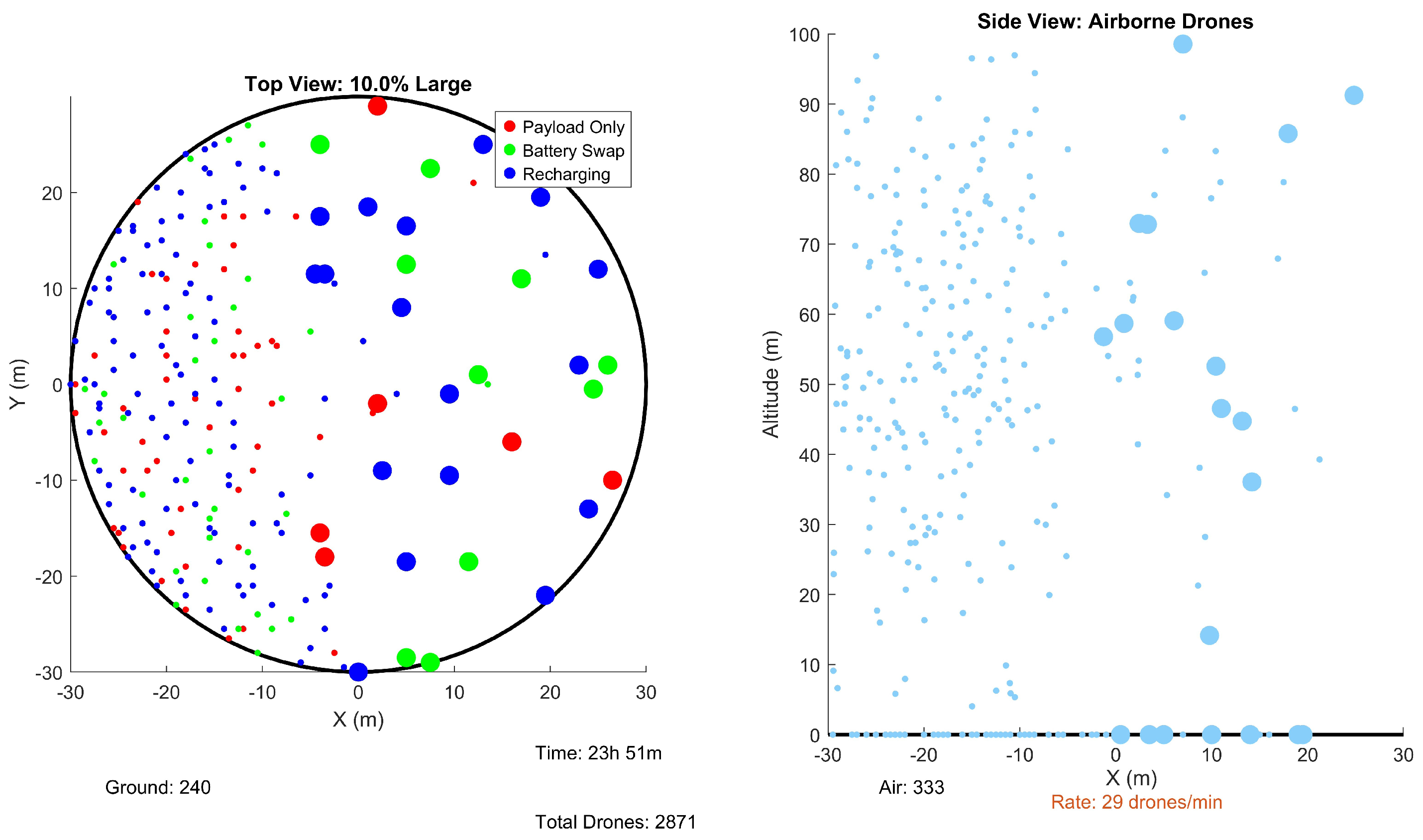
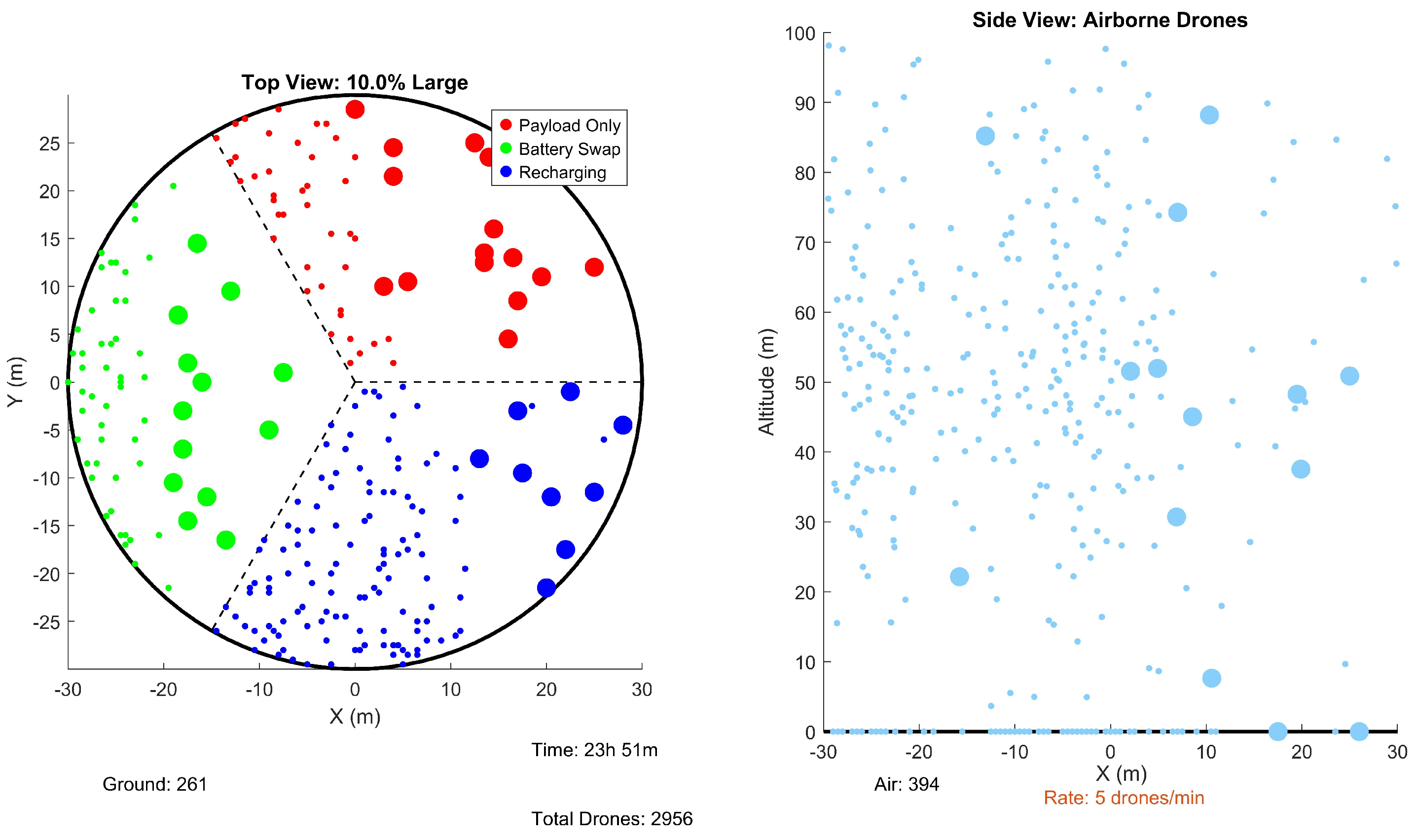
- Zone 1—Battery Charging: UASs land to recharge their onboard batteries.
- Zone 2—Battery Swapping: UASs undergo rapid battery exchange procedures.
- Zone 3—Cargo Handling: UASs unload completed deliveries and are reloaded with new cargo before take-off.
6. Simulation Workflow
- Vertiport diameter.
- Percentage of large UAS.
- Separation as a percentage of wingspan between the UAS used to initiate the grid.
- Flight mission durations.
- Percentage of UAS leaving the airspace.
- Time after which the UAS permanently leave the airspace.
- Vertiport diameter: 60 m.
- Large UASs stand for 10% of total UAS.
- Short mission is assumed to be 30 min.
- The long mission is assumed to be 60 min.
- A total of 20% of UASs leave the simulation area 15 min after takeoff permanently.
- Simulation time of 24 h.
- Top-down view of UAS distribution on the vertiport.
- Altitude progression of UASs in flight.
- Time series of active UASs (grounded vs. airborne).
7. Results and Visualization
7.1. Test Cases
- Vertiport diameter D.
- Simulation time t.
- Large UAS percentage p.
- A short mission is assumed as 30 [min].
- A long mission is assumed as 60 [min].
- A total of 20% of UASs leave the simulation area 15 min after takeoff permanently.
7.1.1. Vertiport Diameters
- Small food delivery vertiport diameter ].
- Intermediate vertiport ].
- Large package delivery vertiport diameter ].
7.1.2. Simulation Times
- One day ].
- Twelve hours ].
- Rush hours ].
7.1.3. Large UAS Percentage
- No large UASs .
- The same amount of large and small UASs .
- Only large UASs .
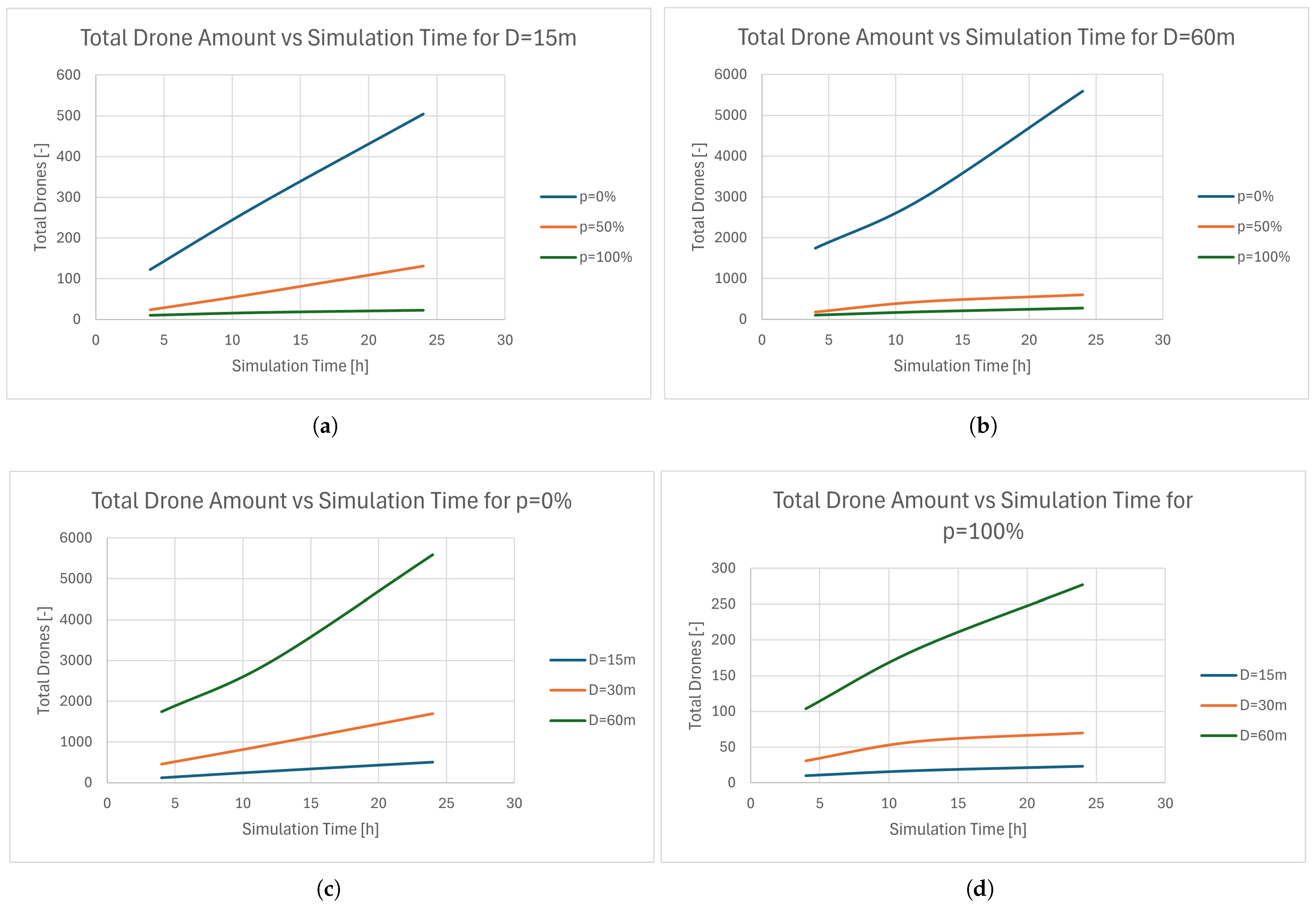
7.2. Results Analysis
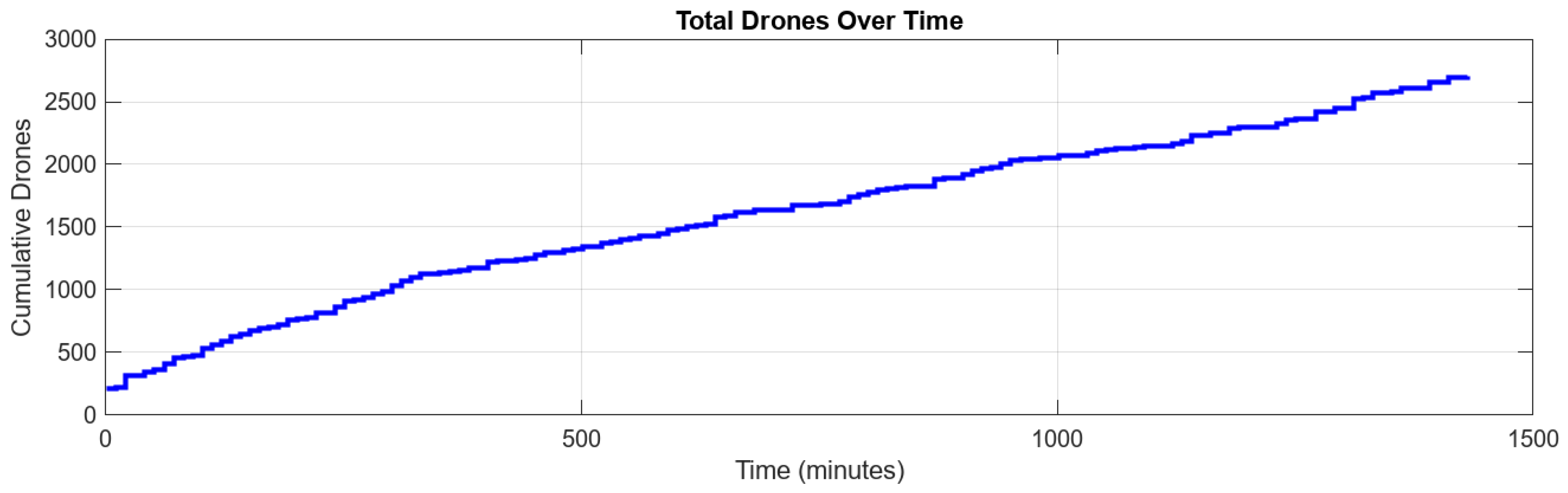
- The total number of UASs increases over time.
- The more smaller UASs (smaller p), the more total UASs overall.
- The total number of UASs increases almost linearly for all UAS sizes, independently of vertiport diameter.
8. Discussion
Model Validity
9. Conclusions
10. Future Work
- Pilot Field Trials [39]: Conduct a small-scale vertiport operation utilizing standard equipment to measure actual turnaround times, traffic behavior, and reactions to congestion and compare them against results obtained through simulations.
- Calibration of Historical Data: Use operation logs from existing drone delivery operations (e.g., logistics companies [40]) to calibrate mission duration distributions and service time parameters.
- Hardware-in-the-Loop (HIL) Testing [41]: Integrate actual unmanned aerial system (UAS) communication and collision-avoidance elements in the simulated system to assess the effects of latency or inaccuracies of the control algorithms on the functional performance of vertiports.
- Sensitivity Analyses [42]: Systematically vary uncertain parameters, e.g., descent rates and battery exchange times, and compare the resulting data with the available limited empirical data to test the robustness of the model.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Uber. Introducing Uber Copter, Technical Report. Available online: https://www.uber.com/blog/new-york-city/uber-copter (accessed on 20 April 2025).
- Castro, D.G.; García, E.V. Safety Challenges for Integrating U-Space in Urban Environments. In Proceedings of the 2021 International Conference on Unmanned Aircraft Systems (ICUAS), Athens, Greece, 15–18 June 2021; pp. 1258–1267, ISSN 2575-7296. [Google Scholar] [CrossRef]
- Meincke, P.; Duca, G.; Ciaburri, M.; Russo, R.; Enei, R.; Proietti, S.; Dziugiel, B.; Mączka, M.; Stańczyk, A. Concept of Operations for ATM Service to Passengers in Intermodal Transport System; Technical Report; SESAR: Brussels, Belgium, 2022. [Google Scholar]
- Cohn, P.; Green, A.; Langstaff, M.; Roller, M. Commercial Drones Are Here: The Future of Unmanned Aerial Systems. Available online: https://www.scribd.com/document/725004715/commercial-drones-are-here-the-future-of-unmanned-aerial-systems (accessed on 20 April 2025).
- Sengupta, D.; Das, S.K. Urban Air Mobility: Vision, Challenges and Opportunities. In Proceedings of the 2023 IEEE 24th International Conference on High Performance Switching and Routing (HPSR), Albuquerque, NM, USA, 5–7 June 2023; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, Z.; Nie, L.; Xu, G.; Li, Y.; Guan, X. Multi-Objective Design of UAS Air Route Network Based on a Hierarchical Location–Allocation Model. Sustainability 2023, 15, 16521. [Google Scholar] [CrossRef]
- Watts, A.C.; Ambrosia, V.G.; Hinkley, E.A. Unmanned Aircraft Systems in Remote Sensing and Scientific Research: Classification and Considerations of Use. Remote Sens. 2012, 4, 1671–1692. [Google Scholar] [CrossRef]
- Tmušić, G.; Manfreda, S.; Aasen, H.; James, M.R.; Gonçalves, G.; Ben-Dor, E.; Brook, A.; Polinova, M.; Arranz, J.J.; Mészáros, J.; et al. Current Practices in UAS-based Environmental Monitoring. Remote Sens. 2020, 12, 1001. [Google Scholar] [CrossRef]
- Goyal, R.; Reiche, C.; Fernando, C.; Cohen, A. Advanced Air Mobility: Demand Analysis and Market Potential of the Airport Shuttle and Air Taxi Markets. Sustainability 2021, 13, 7421. [Google Scholar] [CrossRef]
- Zhyriakov, D.; Ptak, M.; Sawicki, M. Urban Air Mobility, Personal Drones, and the Safety of Occupants—A Comprehensive Review. J. Sens. Actuator Netw. 2025, 14, 39. [Google Scholar] [CrossRef]
- Schweiger, K.; Preis, L. Urban Air Mobility: Systematic Review of Scientific Publications and Regulations for Vertiport Design and Operations. Drones 2022, 6, 179. [Google Scholar] [CrossRef]
- Biehle, T. Social Sustainable Urban Air Mobility in Europe. Sustainability 2022, 14, 9312. [Google Scholar] [CrossRef]
- Song, K.H.; Lee, H. Network Topology-Driven Vertiport Placement Strategy: Integrating Urban Air Mobility with the Seoul Metropolitan Railway System. Appl. Sci. 2025, 15, 3965. [Google Scholar] [CrossRef]
- Goyal, R.; Reiche, C.; Fernando, C.; Serrao, J.; Kimmel, S.; Cohen, A.; Shaheen, S. Urban Air Mobility (UAM) Market Study. Available online: https://ntrs.nasa.gov/citations/20190001472 (accessed on 20 April 2025).
- Cohen, A.P.; Shaheen, S.A.; Farrar, E.M. Urban Air Mobility: History, Ecosystem, Market Potential, and Challenges. IEEE Trans. Intell. Transp. Syst. 2021, 22, 6074–6087. [Google Scholar] [CrossRef]
- Thipphavong, D.P.; Apaza, R.; Barmore, B.; Battiste, V.; Burian, B.; Dao, Q.; Feary, M.; Go, S.; Goodrich, K.H.; Homola, J.; et al. Urban Air Mobility Airspace Integration Concepts and Considerations. In Proceedings of the 2018 Aviation Technology, Integration, and Operations Conference, Atlanta, Georgia, 25–29 June 2018; AIAA AVIATION Forum, American Institute of Aeronautics and Astronautics: Moffett Field, CA, USA, 2018. [Google Scholar] [CrossRef]
- Yan, Y.; Wang, K.; Qu, X. Urban air mobility (UAM) and ground transportation integration: A survey. Front. Eng. Manag. 2024, 11, 734–758. [Google Scholar] [CrossRef]
- Sengupta, R.; Bulusu, V.; Mballo, C.E.; Onat, E.; Cao, S. Urban Air Mobility Research Challenges and Opportunities. Annu. Rev. Control. Robot. Auton. Syst. 2025, 8, 407–431. [Google Scholar] [CrossRef]
- Schuchardt, B.I.; Geister, D.; Lüken, T.; Knabe, F.; Metz, I.C.; Peinecke, N.; Schweiger, K. Air Traffic Management as a Vital Part of Urban Air Mobility—A Review of DLR’s Research Work from 1995 to 2022. Aerospace 2023, 10, 81. [Google Scholar] [CrossRef]
- InPost, S.A. Annual Report 2022. Technical Report. 2023. Available online: https://inpost.eu/sites/default/files/2023-03/InPost%20IAR%202022.pdf (accessed on 20 April 2025).
- Stava Report on Food Delivery Market in Poland 2023. Technical Report. 2023. Available online: https://stava-reports.s3.eu-central-1.amazonaws.com/Raport+Stava+o+rynku+dowozo%CC%81w+jedzenia+2023.pdf (accessed on 20 April 2025).
- Arafat, M.Y.; Pan, S. Urban Air Mobility Communications and Networking: Recent Advances, Techniques, and Challenges. Drones 2024, 8, 702. [Google Scholar] [CrossRef]
- Moradi, N.; Wang, C.; Mafakheri, F. Urban Air Mobility for Last-Mile Transportation: A Review. Vehicles 2024, 6, 1383–1414. [Google Scholar] [CrossRef]
- Charnsethikul, C.; Silva, J.M.; Verhagen, W.J.C.; Das, R. Urban Air Mobility Aircraft Operations in Urban Environments: A Review of Potential Safety Risks. Aerospace 2025, 12, 306. [Google Scholar] [CrossRef]
- Straubinger, A.; Rothfeld, R.; Shamiyeh, M.; Büchter, K.D.; Kaiser, J.; Plötner, K.O. An Overview of Current Research and Developments in Urban Air Mobility—Setting the Scene for UAM Introduction. J. Air Transp. Manag. 2020, 87, 101852. [Google Scholar] [CrossRef]
- Polish Air Navigation Services Agency. PansaUTM. 2023. Available online: https://utm.pansa.pl/ (accessed on 20 April 2025).
- Sarhan, S.; Rinaldi, M.; Primatesta, S.; Guglieri, G. Noise-Aware UAV Path Planning in Urban Environment with Reinforcement Learning. Eng. Proc. 2025, 90, 3. [Google Scholar] [CrossRef]
- European Union. Report from the Commission to the European Parliament and the Council on the Implementation of the Environmental Noise Directive in accordance with Article 11 of Directive 2002/49/EC. 2023. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/?uri=celex:52011DC0321 (accessed on 15 April 2025).
- WHO EURO. Burden of Disease from Environmental Noise: Quantification of Healthy Life Years Lost in Europe. 2011. Available online: https://www.who.int/publications/i/item/burden-of-disease-from-environmental-noise-quantification-of-healthy-life-years-lost-in-europe (accessed on 10 April 2025).
- Wei, Q.; Gao, Z.; Clarke, J.P.; Topcu, U. Risk-aware Urban Air Mobility Network Design with Overflow Redundancy. arXiv 2023, arXiv:2306.05581. [Google Scholar] [CrossRef]
- Baek, H.Y.; Kim, J.H. Prediction of Urban Air Mobility and Drone Accident Rates and the Role of Urban Management Systems. Urban Sci. 2025, 9, 24. [Google Scholar] [CrossRef]
- Lee, C.W.; Madnick, S. Cybersafety Approach to Cybersecurity Analysis and Mitigation for Mobility-as-a-Service and Internet of Vehicles. Electronics 2021, 10, 1220. [Google Scholar] [CrossRef]
- Polska Agencja Żeglugi Powietrznej. Co Może Grozić za Naruszanie Przepisów Określających Zasady Wykonywania Lotów Dronami? Available online: https://www.pansa.pl/co-moze-grozic-za-naruszanie-przepisow-okreslajacych-zasady-wykonywania-lotow-dronami/ (accessed on 9 April 2025).
- Urban Air Mobility Concept of Operations. Available online: https://nari.arc.nasa.gov/sites/default/files/attachments/UAM_ConOps_v1.0.pdf (accessed on 10 April 2025).
- Agouridas, V.; Biermann, F.; Czaya, A.; Richter, D.; Stemmler, J.; Stęchły, J.; Witkowska-Konieczny, A.; Kumar, R.; Patatouka, E. Practitioner Briefing Urban Air Mobility and Sustainable Urban Mobility Planning. 2021. Available online: https://urban-mobility-observatory.transport.ec.europa.eu/system/files/2023-11/urban_air_mobility_and_sump.pdf (accessed on 13 April 2025).
- Arnedo, M. 10.3.4: Classification of the Airspace According to ICAO. Available online: https://eng.libretexts.org/Bookshelves/Aerospace_Engineering/Fundamentals_of_Aerospace_Engineering_(Arnedo)/10%3A_Air_navigation-_ATM/10.03%3A_Airspace_Management_(ASM)/10.3.04%3A_Classification_of_the_airspace_according_to_ICAO (accessed on 13 April 2025).
- Vertiports-Urban-Environment. European Union Aviation Safety Agency: The European Union Authority for Aviation Safety. 2022. Available online: https://www.easa.europa.eu/pl/light/topics/vertiports-urban-environment (accessed on 13 April 2025).
- Kopyt, A.; Sochacki, M.; Kaczmarek, K. Tool for Analysis of Traffic of Vertical Take-off and Landing Aircraft in Urban Agglomerations. J. Theor. Appl. Mech. 2024, 63, 103–113. [Google Scholar] [CrossRef]
- ISPRA; CEDRE; UAS Italian Fire Brigade Service; Brittany Fire Brigades. D5.3 Report on Field Trials and Lessons Learnt. 2023. Available online: https://wwz.cedre.fr/en/content/download/11175/file/D5.3-Summaryreportdef.pdf (accessed on 13 April 2025).
- GIS Support. Dane Statystyczne GUS. 2022. Available online: https://gis-support.pl/baza-wiedzy-2/dane-do-pobrania/dane-statystyczne-gus/ (accessed on 13 April 2025).
- Ledin, J.A. Hardware-in-the-Loop Simulation. 1999. Available online: https://idsc.ethz.ch/content/dam/ethz/special-interest/mavt/dynamic-systems-n-control/idsc-dam/Lectures/Embedded-Control-Systems/AdditionalMaterial/Applications/APP_Hardware-in-the-Loop_Simulation.pdf (accessed on 13 April 2025).
- skybrary.aero. Guidance Material: Sensitivity Analysis. p. 18. Available online: https://skybrary.aero/sites/default/files/bookshelf/33474.pdf (accessed on 13 April 2025).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Configuration | Input | Output | ||||
|---|---|---|---|---|---|---|
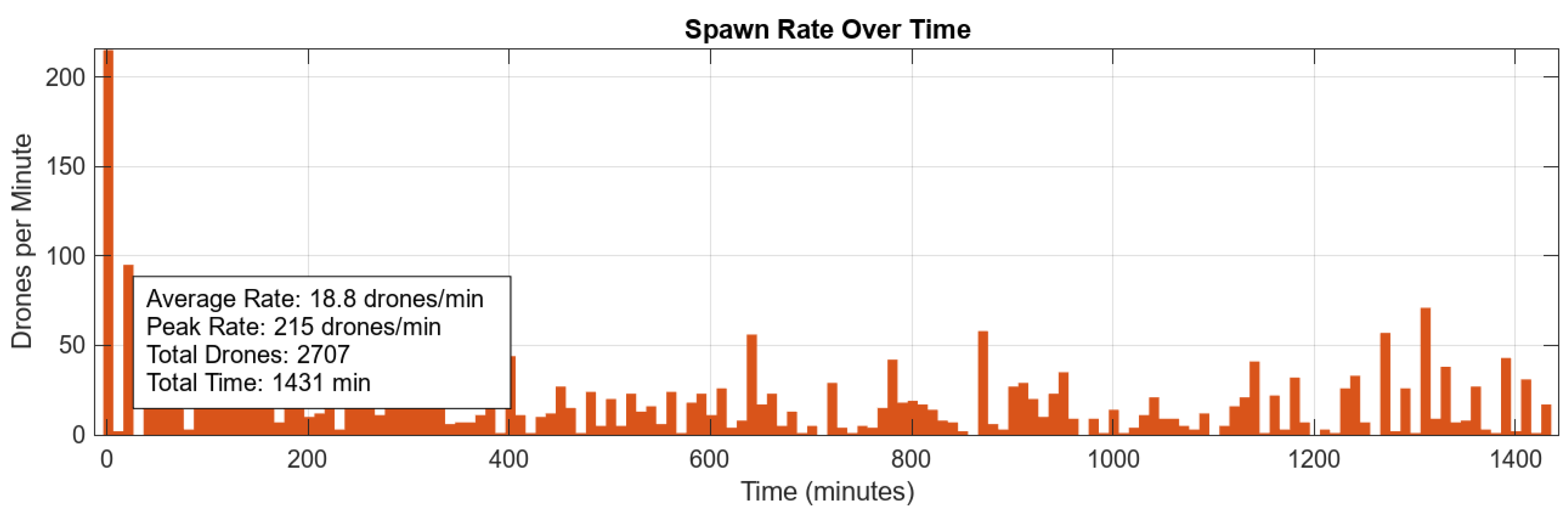
| D [m] | t [h] | p [%] | Total UAS | Average Rate [UAS/min] | Peak Rate [UAS/min] | |
| 1 | 15 | 24 | 100 | 23 | 0.2 | 4 |
| 2 | 15 | 24 | 50 | 131 | 0.9 | 6 |
| 3 | 15 | 24 | 0 | 504 | 3.5 | 23 |
| 4 | 15 | 12 | 100 | 17 | 0.2 | 4 |
| 5 | 15 | 12 | 50 | 65 | 0.9 | 8 |
| 6 | 15 | 12 | 0 | 283 | 3.9 | 27 |
| 7 | 15 | 4 | 100 | 10 | 0.4 | 4 |
| 8 | 15 | 4 | 50 | 24 | 1.0 | 10 |
| 9 | 15 | 4 | 0 | 123 | 5.1 | 29 |
| 10 | 30 | 24 | 100 | 70 | 0.5 | 16 |
| 11 | 30 | 24 | 50 | 261 | 1.8 | 14 |
| 12 | 30 | 24 | 0 | 1698 | 11.8 | 96 |
| 13 | 30 | 12 | 100 | 58 | 0.8 | 16 |
| 14 | 30 | 12 | 50 | 160 | 2.2 | 20 |
| 15 | 30 | 12 | 0 | 938 | 13.0 | 79 |
| 16 | 30 | 4 | 100 | 31 | 1.3 | 14 |
| 17 | 30 | 4 | 50 | 73 | 3.0 | 14 |
| 18 | 30 | 4 | 0 | 456 | 19.0 | 110 |
| 19 | 60 | 24 | 100 | 277 | 1.9 | 55 |
| 20 | 60 | 24 | 50 | 599 | 4.2 | 61 |
| 21 | 60 | 24 | 0 | 5594 | 38.8 | 441 |
| 22 | 60 | 12 | 100 | 187 | 2.6 | 53 |
| 23 | 60 | 12 | 50 | 432 | 6.0 | 99 |
| 24 | 60 | 12 | 0 | 2959 | 41.1 | 414 |
| 25 | 60 | 4 | 100 | 104 | 4.3 | 53 |
| 26 | 60 | 4 | 50 | 179 | 7.5 | 63 |
| 27 | 60 | 4 | 0 | 1742 | 72.6 | 446 |
| D [m] | Total UAS [-] | Average Rate [UAS/min] | Peak Rate [UAS/min] |
|---|---|---|---|
| 15 | 131 | 2 | 13 |
| 30 | 416 | 6 | 42 |
| 60 | 1341 | 20 | 187 |
| t [h] | Total UAS [-] | Average Rate [UAS/min] | Peak Rate [UAS/min] |
| 4 | 305 | 13 | 83 |
| 12 | 567 | 8 | 80 |
| 24 | 1017 | 7 | 80 |
| p [%] | Total UAS [-] | Average Rate [UAS/min] | Peak Rate [UAS/min] |
| 0 | 1589 | 23 | 185 |
| 50 | 214 | 3 | 33 |
| 100 | 86 | 1 | 24 |
| Average | 670 | 9 | 81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kopyt, A.; Dylicki, S. Urban Air Mobility Vertiport’s Capacity Simulation and Analysis. Aerospace 2025, 12, 560. https://doi.org/10.3390/aerospace12060560
Kopyt A, Dylicki S. Urban Air Mobility Vertiport’s Capacity Simulation and Analysis. Aerospace. 2025; 12(6):560. https://doi.org/10.3390/aerospace12060560
Chicago/Turabian StyleKopyt, Antoni, and Sebastian Dylicki. 2025. "Urban Air Mobility Vertiport’s Capacity Simulation and Analysis" Aerospace 12, no. 6: 560. https://doi.org/10.3390/aerospace12060560
APA StyleKopyt, A., & Dylicki, S. (2025). Urban Air Mobility Vertiport’s Capacity Simulation and Analysis. Aerospace, 12(6), 560. https://doi.org/10.3390/aerospace12060560