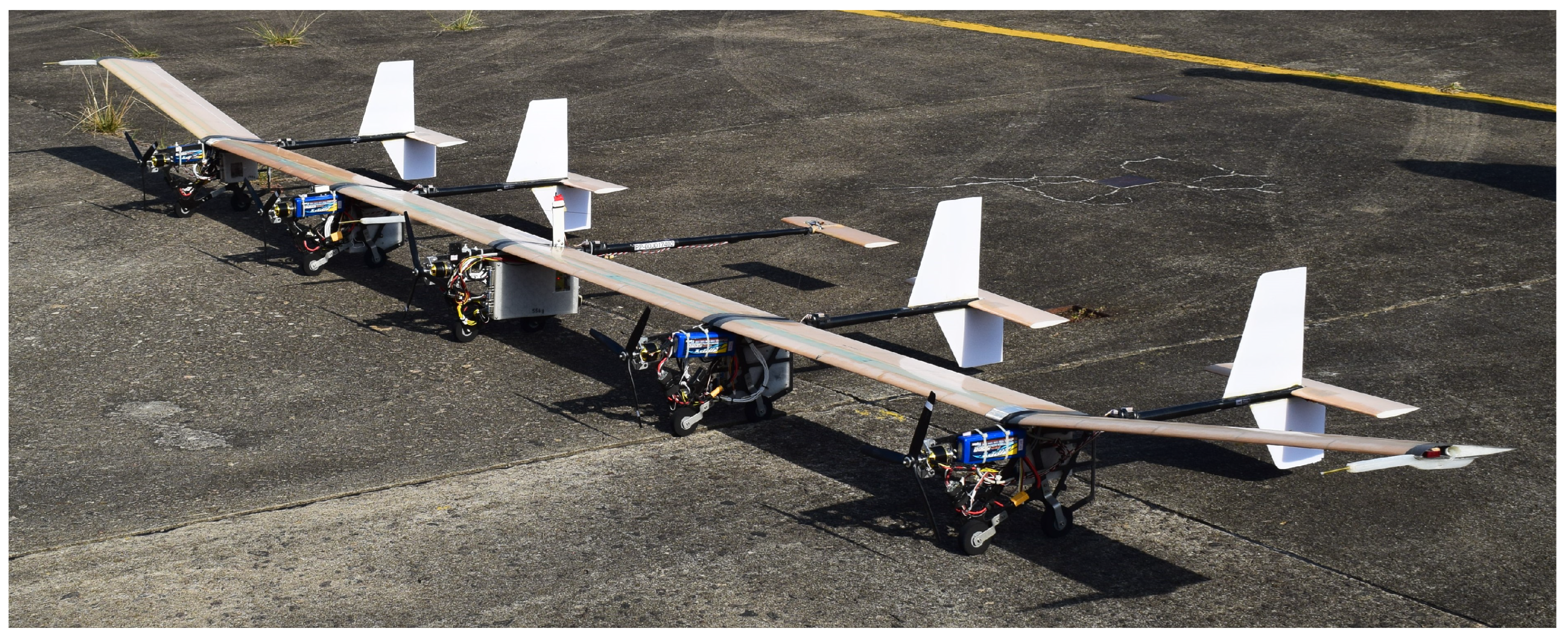
The ITA X-HALE aircraft, illustrated in
Figure 1, has a total mass of 12.363 kg. Its modular wing design consists of six segments, each with a span of 1.0 m and a chord of 0.2 m. Electric motors, landing gear, and onboard electronics are housed in pods located at the junctions between adjacent modules. Attached to these pods are booms that extend rearward, each supporting a tail assembly at its tip. The central tail can be fixed either in a horizontal or vertical position to adjust the aircraft’s lateral–directional characteristics. In this study, the central tail is fixed in the vertical position. The side tails are all-moving control surfaces, known as elevons, capable of providing both longitudinal and lateral–directional control. The outermost wing modules incorporate a 10° dihedral angle, and the entire wing is mounted with a 5° incidence angle. The wing uses the EMX-07 reflexed airfoil, while the tail surfaces are based on the NACA 0012 airfoil.
3.1. Model Description
The mathematical formulation used to model the ITA X-HALE flight dynamics is based on the equations of motion derived for dually constrained axes [
4,
31]. In this formulation, the origin,
S, of the structural axes, corresponding to a material point without elastic displacement, can be non-coincident with the origin
O of the body axes used in the equations of motion. In calculating equilibrium conditions, all the structural degrees of freedom are considered. In modeling the nonlinear flight dynamics around equilibrium, a reduced set of inertia-relieved constrained modes of vibration [
4,
31] are retained.
The aerodynamic model of the aircraft is based both on the doublet-lattice method [
32] and on the vortex-lattice method [
33] to which the former reduces at zero frequency. Rational function approximations [
31,
34] make the representation of aerodynamic loads possible in the time domain. Consequently, a significant number of aerodynamic lag states arise to make the approximation sufficiently accurate. The induced drag is also modeled based on the method of Ref. [
35].
The wing structural–dynamic model consists of beam finite elements along the span. Beam elements are also used for the connection between the wing and the booms and for the booms themselves. The horizontal tails are modeled with rigid elements. Small deformations are assumed.
For control system design purposes, linear-time-invariant realizations of the nonlinear model under small disturbances around different equilibrium flight conditions are considered for the six-meter-span aircraft with a vertical central tail. The system of linear equations is then given as follows:
where
is the state matrix,
is the control matrix,
is the output matrix and
is the direct-feed matrix.
The vector of disturbances of the state variables around the equilibrium conditions is given as follows:
where
and disturbances with respect to the equilibrium states are implicit.
The model includes the kinematic equations in the inertial reference frame for all six rigid-body degrees of freedom: displacements in the
x and
y directions, altitude
H, and roll, pitch, and yaw angles (
,
, and
, respectively). Furthermore, the velocity,
V, the angle of attack,
, the sideslip angle,
, as well as the angular rates
p,
q, and
r also have their corresponding equations of motion. The structural dynamics are represented by modal coordinates. The modal amplitudes and their time derivatives are given by
and
, respectively. Modes of vibration with frequencies up to 25 Hz is retained in the model. Aerodynamic lag states due to rigid-body and control-surface dynamics (
) and due to the aeroelastic dynamics (
) are also included. Guimarães Neto et al. [
22] make a more in-depth description of the model and also present a validation of the numerical results with flight test data.
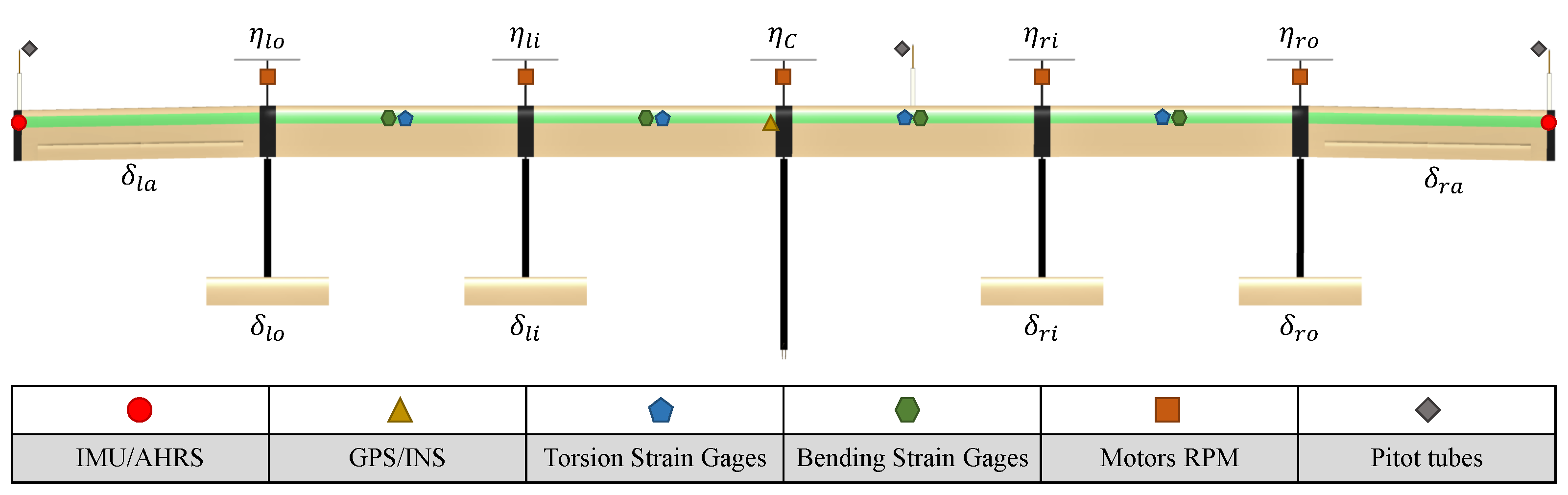
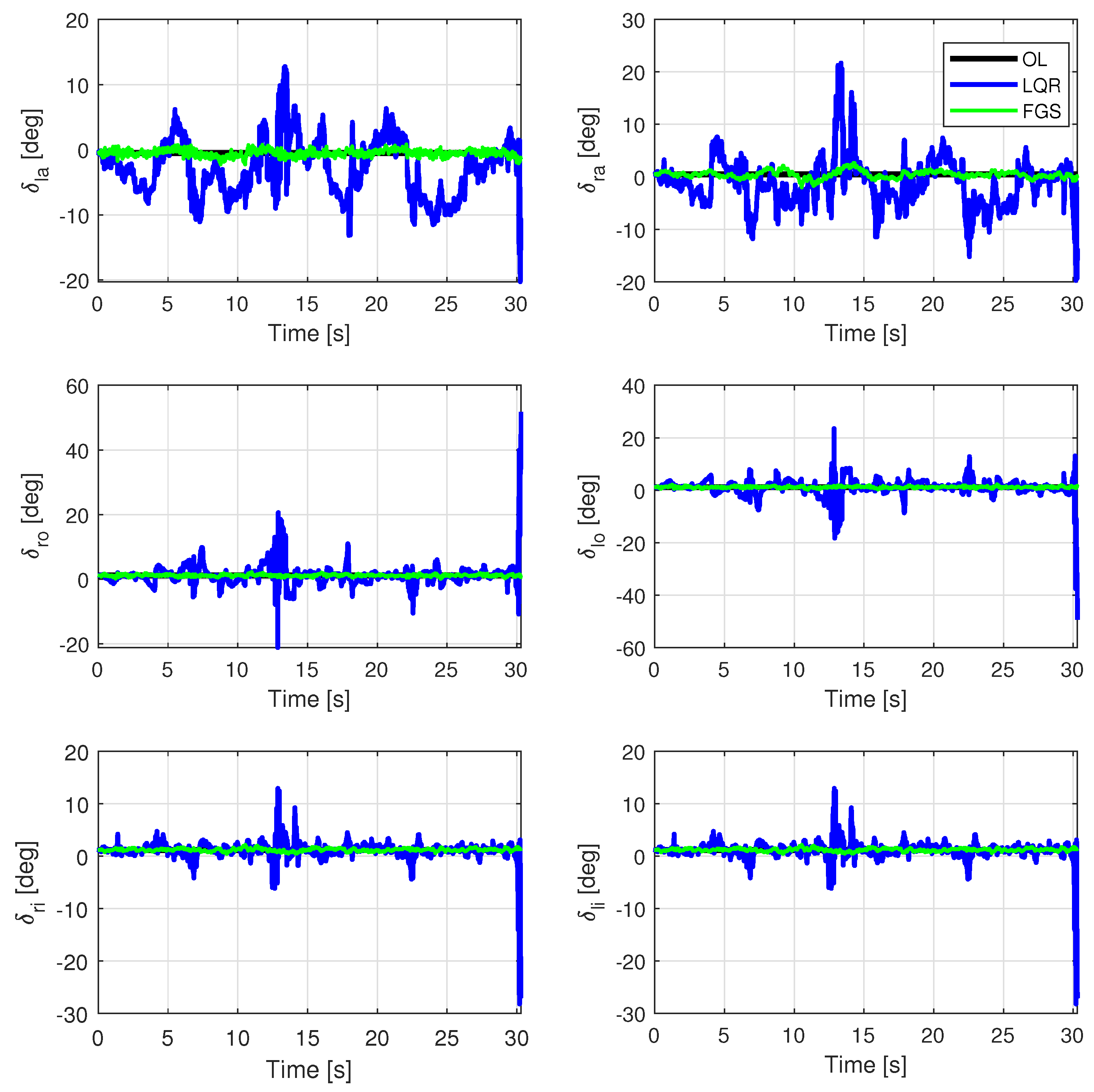
Moreover, actuation system elements make up the control inputs of the aircraft: the elevons, the ailerons, and the electric motors, all of which can be independently controlled.
Figure 5 shows the corresponding nomenclature of each control input for the six-meter-san ITA X-HALE aircraft.
Therefore, for the six-meter-span ITA X-HALE, the linear model comprises
states: 12 from rigid-body motion; 83 from rigid-body and control-surface aerodynamic lag states; 58 from elastic states; and 199 from aeroelastic aerodynamic lag states. Also, the model presents a total of
control input variables, whose disturbances around the equilibrium flight conditions are given as follows:
where
. The variables corresponding to the control surface deflections are given in degrees, whereas the ones corresponding to the throttle setting of each motor vary from zero to one (full throttle).
All aircraft actuators (Equation (
38)) can be independently commanded. However, a couple of command rules mixing the actuators are enforced to reduce the number of gains to be determined once we can assume that the aircraft is nearly symmetric with respect to the
plane. In this mixing, it was defined that the inner elevons
and
operate symmetrically as elevators (
), and the outer elevons
and
operate anti-symmetrically (
). The outer electric motors are used differentially to generate yawing motion (
), in substitution of a rudder, while all motors operate together to generate thrust—in this case, the total thrust is due to the sum of all motors (
). Finally, the ailerons
and
were employed in both symmetric and antisymmetric motions, with the purpose of correcting the shape of the aircraft. Then, the input vector can be rewritten as follows:
where
. The previous assumptions are mathematically represented by the following output matrix restructuring for disturbances around equilibrium:
where
represents the
j-th column of the matrix
,
.
The output
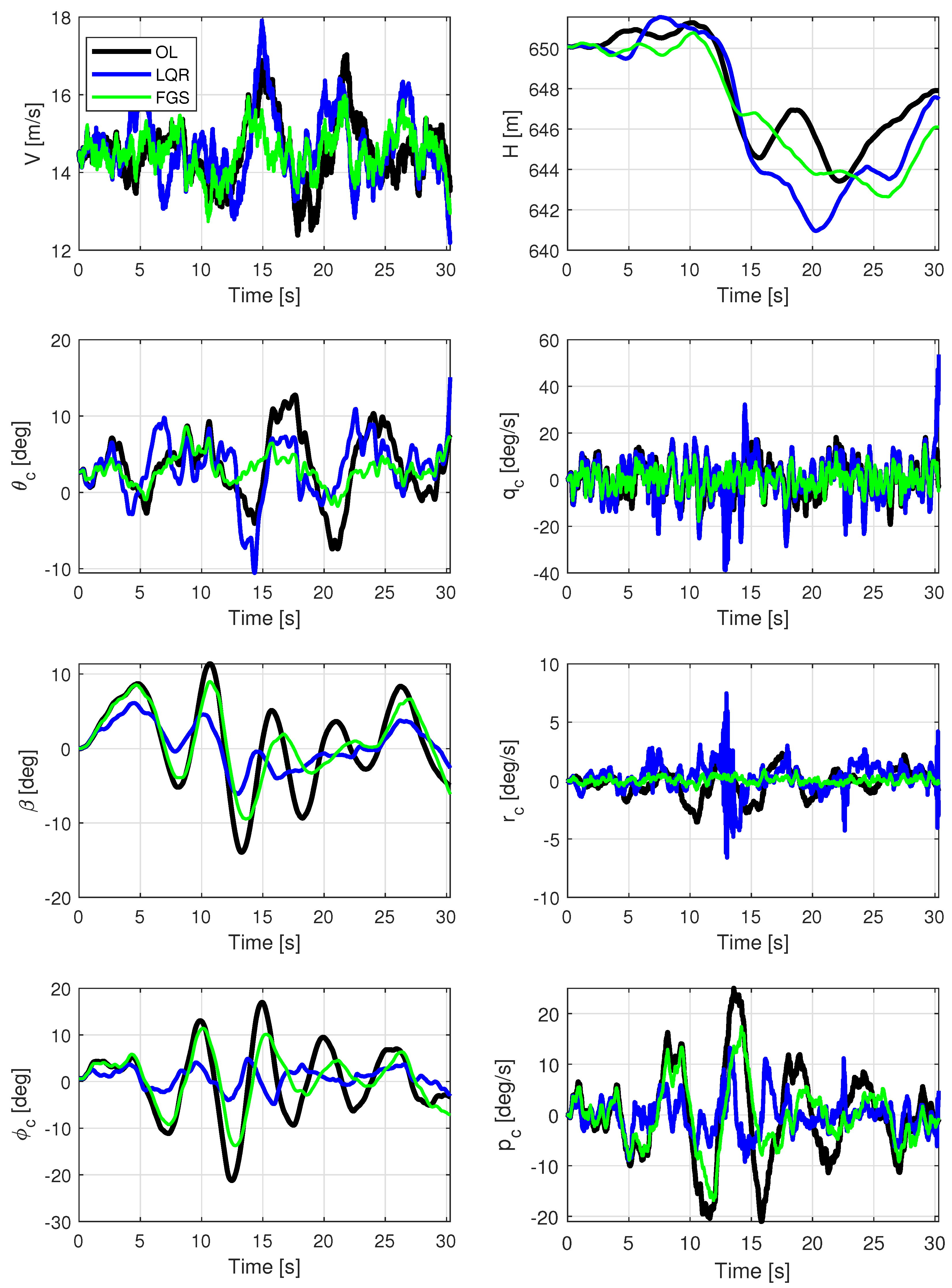
comprises model outputs such as attitudes and angular velocities, at different points of the wing and close to the aircraft center of gravity (CG). All outputs used are measurements made via the aircraft sensors and available in the flight control system:
The rationale for selecting outputs in Equation (
41) is as follows:
is considered to measure the SP and phugoid mode effects;
,
, and
are selected to measure the lateral–directional motion. The fifth element of
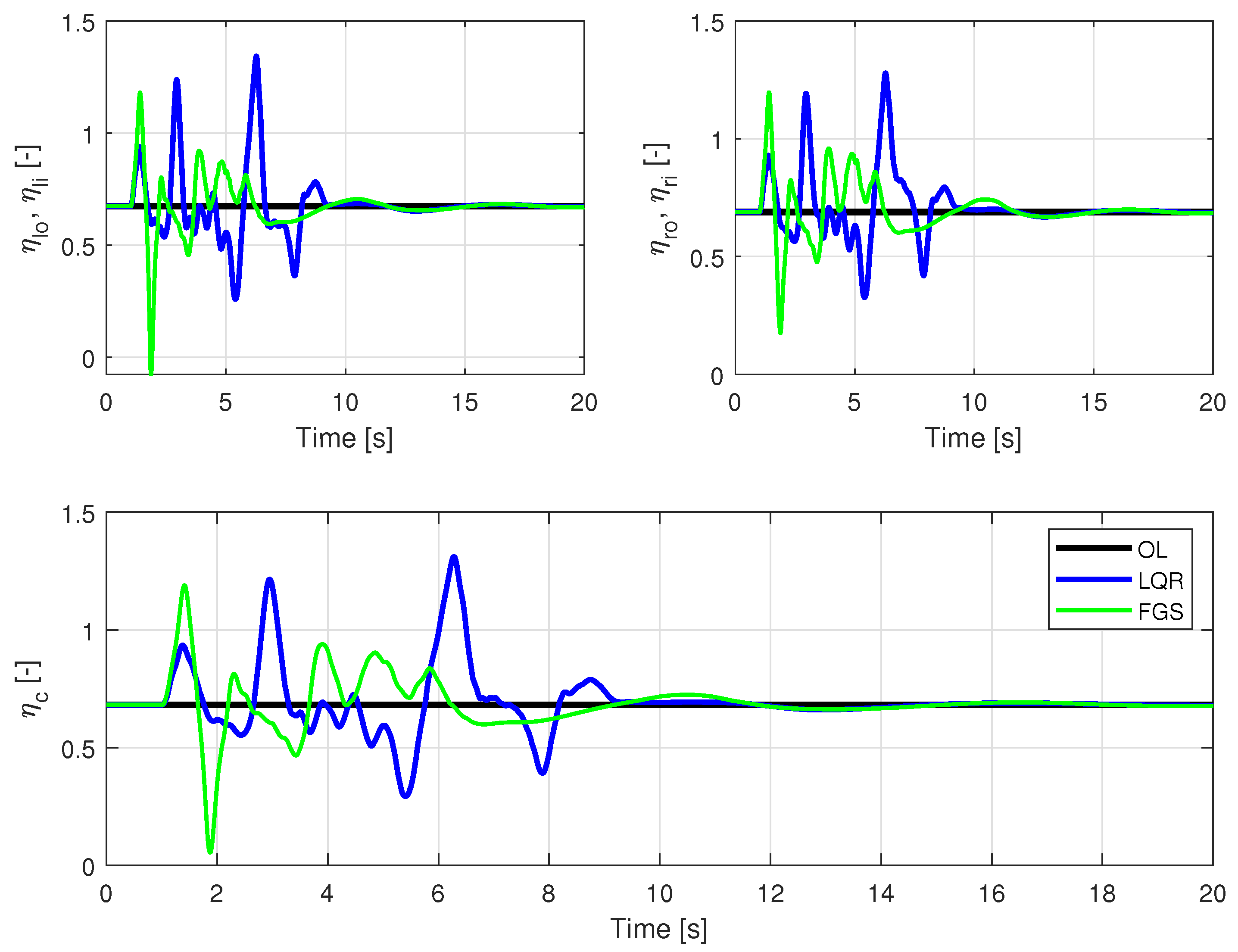
corresponds to a combination of signals to capture the anti-symmetric bending modes, whereas the sixth element captures the symmetric bending motion. Lastly, and similarly, the seventh and eighth signal combinations capture the symmetric and anti-symmetric in-plane modes, respectively.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}