
A Procedure for Developing a Flight Mechanics Model of a Three-Surface Drone Using Semi-Empirical Methods



Abstract
1. Introduction
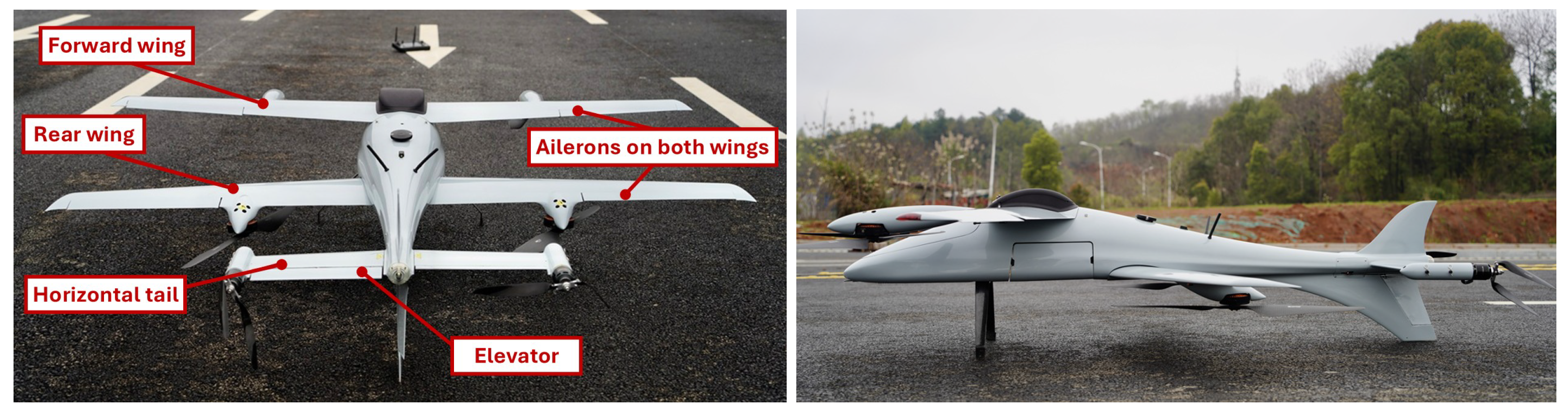
2. Description of the Reference Aircraft: The Dragonfly DS-1
3. Development of Flight Mechanics Model Using Semi-Empirical Method
3.1. Definition of Aircraft Model and Flight Regimes of Interest
- Analysis 1: This analysis considers the fuselage, both the front and rear wings, and the ailerons located on the front wing. The geometry of these wings is the same as that of the physical aircraft. When two lifting surfaces are inputted, DATCOM allows the user to include ailerons on the surface with the lowest span. In the analyzed case, the wings have the same span and, consequently, the rear wing span is artificially reduced by . This analysis provides the modeling of the foremost part of the airplane, including the presence of the ailerons located on the front wing.
- Analysis 2: The considered model is formally equal to that analyzed in the first step, but in this case, the ailerons are placed on the rear wing. To do so, the front wing span is artificially reduced by so as to trigger the canard configuration in DATCOM.
- Analysis 3: This analysis considers both the physical horizontal and vertical tails along with an artificial wing described through the aerodynamic coefficients obtained in “Analysis 1”. The artificial wing, as defined, is geometrically identical to the real rear wing but incorporates the combined effect of the rear and front wings and their mutual interference. This approach is made possible by the fact that DATCOM allows one to directly input the aerodynamic coefficients of a lifting body as if they were experimental data. Clearly, even if the artificial wing is described by the aerodynamic coefficients of the combined tandem wings, its shape, for example, in terms of taper and sweep angle, may have an impact on the overall aerodynamic characteristics. These characteristics can be treated as tuning parameters selected based on the problem at hand. The physical horizontal tail model also incorporates the elevator degrees of freedom. Finally, the vertical tail and the vertical fin of a suitable geometry approximating the real one are included in the analysis.
- Analysis 4: This last analysis considers the isolated fin equipped with the rudder and is only included to evaluate the control derivative with respect to rudder deflection.
3.2. Drag Estimation for Unmodeled Nacelles and Ground Support Structures
3.3. Final Model
4. Sensitivity Analyses and Model Refinement Strategies
4.1. Variation in Artificial Wing Position
4.2. Variation in Equivalent Wing Area
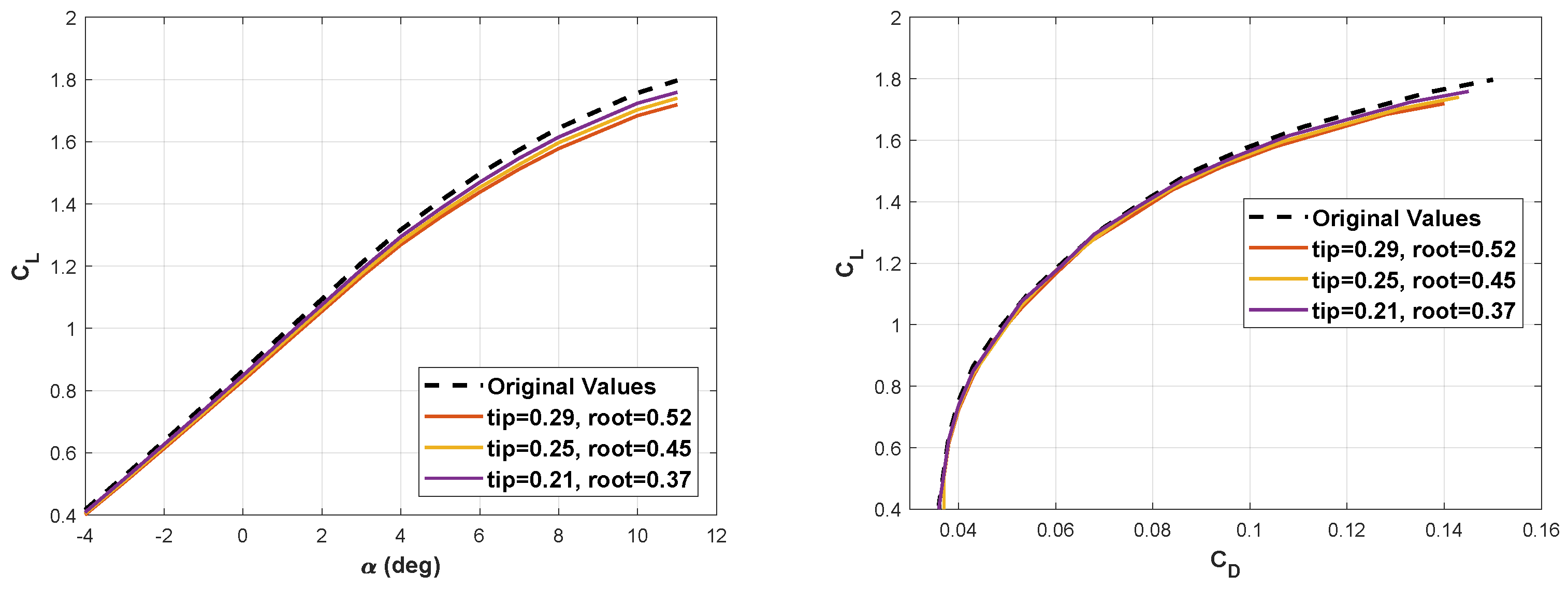
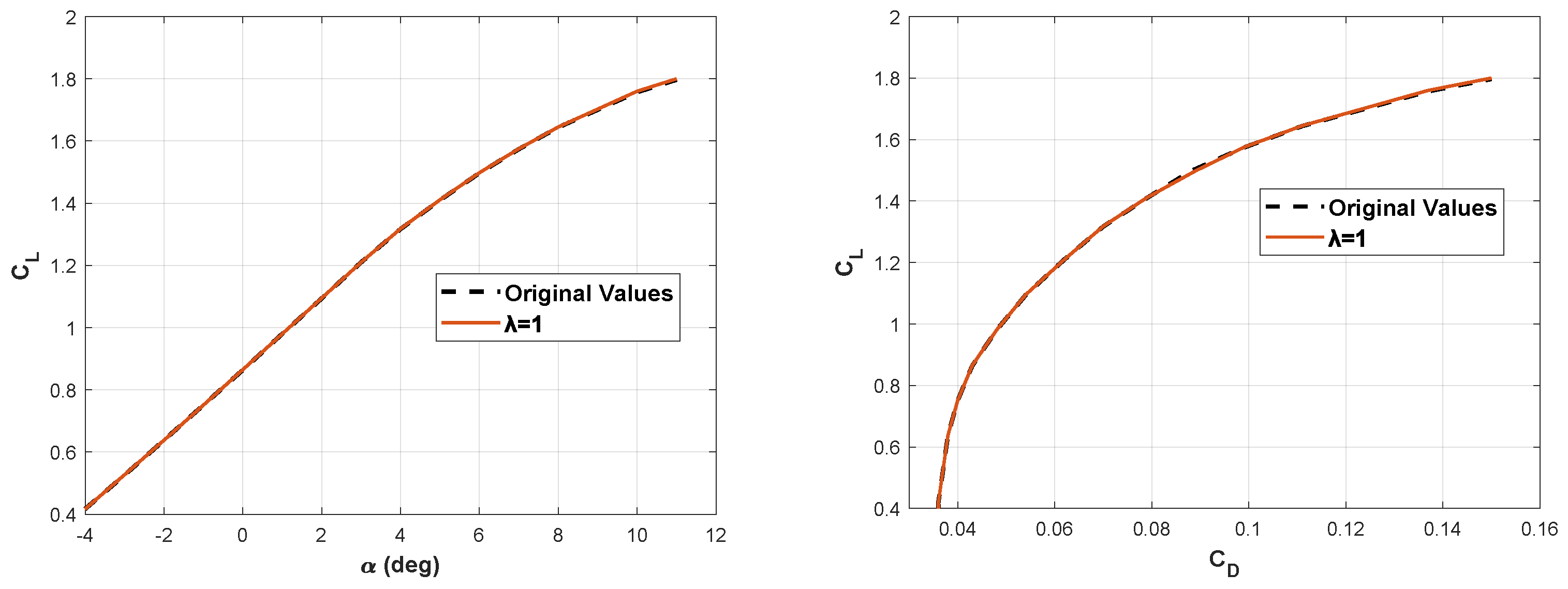
4.3. Variation in Equivalent Wing Taper Ratio
5. Comparative Analysis of CFD Simulations, Experimental Flight Data, and Semi-Empirical Data
5.1. Methodology for Analyzing Experimental Flight Data
- Angular rates, including the roll rate p, pitch rate q, and yaw rate r.
- Linear accelerations along the body-frame axes , , and .
- Speeds extracted from the GPS, including the ground speed (SpD) and the vertical speed ().
- Attitude angles, including the roll (), pitch (), and yaw ().
- Wind estimation components, including the northward and eastward wind velocities ( and ).
- Throttle percentage (Thr), which is the fraction of the maximum available thrust being commanded by the autopilot.
- Windowing: To facilitate statistical analysis, the dataset was divided into non-overlapping windows of 10 samples, 0.1 s for each sample. This approach enabled a local statistical evaluation of flight conditions, reducing the effect of transient fluctuations while preserving steady-state behavior.
- Statistical feature extraction: For each flight parameter within a time window, the mean value, the variance, and the maximum and minimum values were computed.
- Selection criteria: The goal of this step was to identify time windows that corresponded as much as possible to straight and level flight, where aerodynamic forces and moments could be reliably analyzed. The selection criteria included the following:
- Angular rate: To ensure that the UAV was flying as close as possible to uniform rectilinear motion, both the mean values and the variances of the roll rate p, pitch rate q, and yaw rate r were constrained within predefined tolerances, chosen here as for the mean values and for the rate variances. By enforcing these dual constraints, only flight segments where the UAV maintained stable angular velocities with negligible oscillations were selected, reducing the influence of external disturbances and ensuring a reliable aerodynamic dataset.
- Linear accelerations: To ensure that the UAV was in near-equilibrium conditions during level flight, the mean values of the accelerations along the body axes were constrained within predefined limits, chosen here asAdditionally, the variances of the three accelerations were also constrained to be less than 0.2 . The combination of these constraints ensured that the aircraft did not experience significant dynamic effects and that the extracted flight segments represented steady conditions suitable for quantifying the lift and drag coefficients.
- Stability of airspeed: To ensure that the aircraft was in a reasonably uniform flight condition, the variance of the specific airspeed (SpD) was constrained to be lower than .
- Ground course stability: To ensure that the aircraft maintained a consistent heading, the variance of the heading angle was also constrained to be lower than a threshold of .
- Finalization of the process: The selected time windows were extracted and stored for aerodynamic evaluation.
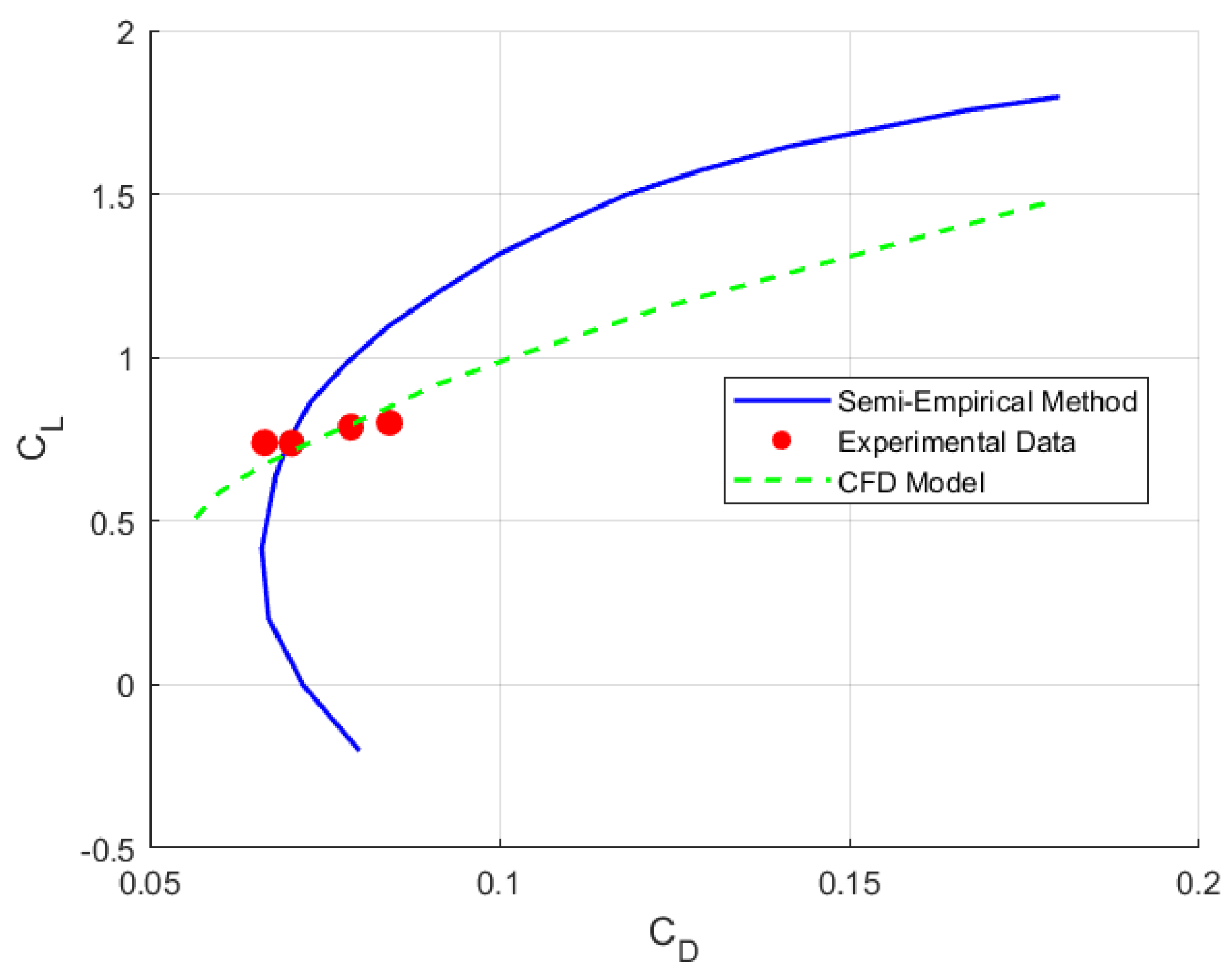
5.2. Comparison of the Drag Polar Between the Experimental Flight Data, CFD Simulations, and Semi-Empirical Method
6. Conclusions
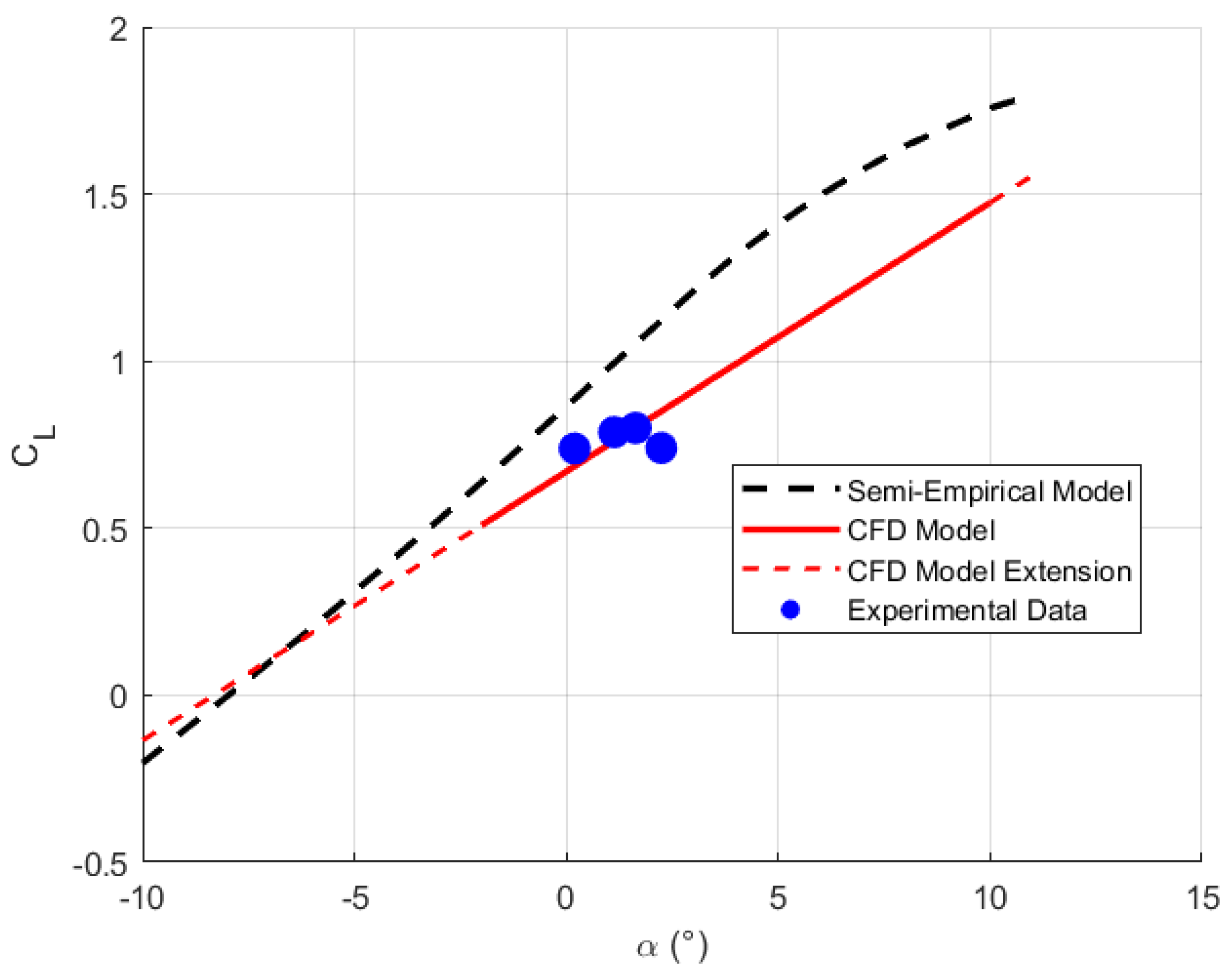
- The CFD simulations based on the URANS methodology provided lift-curve and polar data that aligned closely with the experimental measurements.
- The zero-lift angle was well predicted by the semi-empirical model.
- The agreement between the CFD simulations and the proposed semi-empirical method in terms of the lift slope was insufficient for preliminary investigation and design application, accounting for an error of about 20%. In general, additional improvements to the methodology should be investigated to reduce this error, allowing for routine use of this procedure.
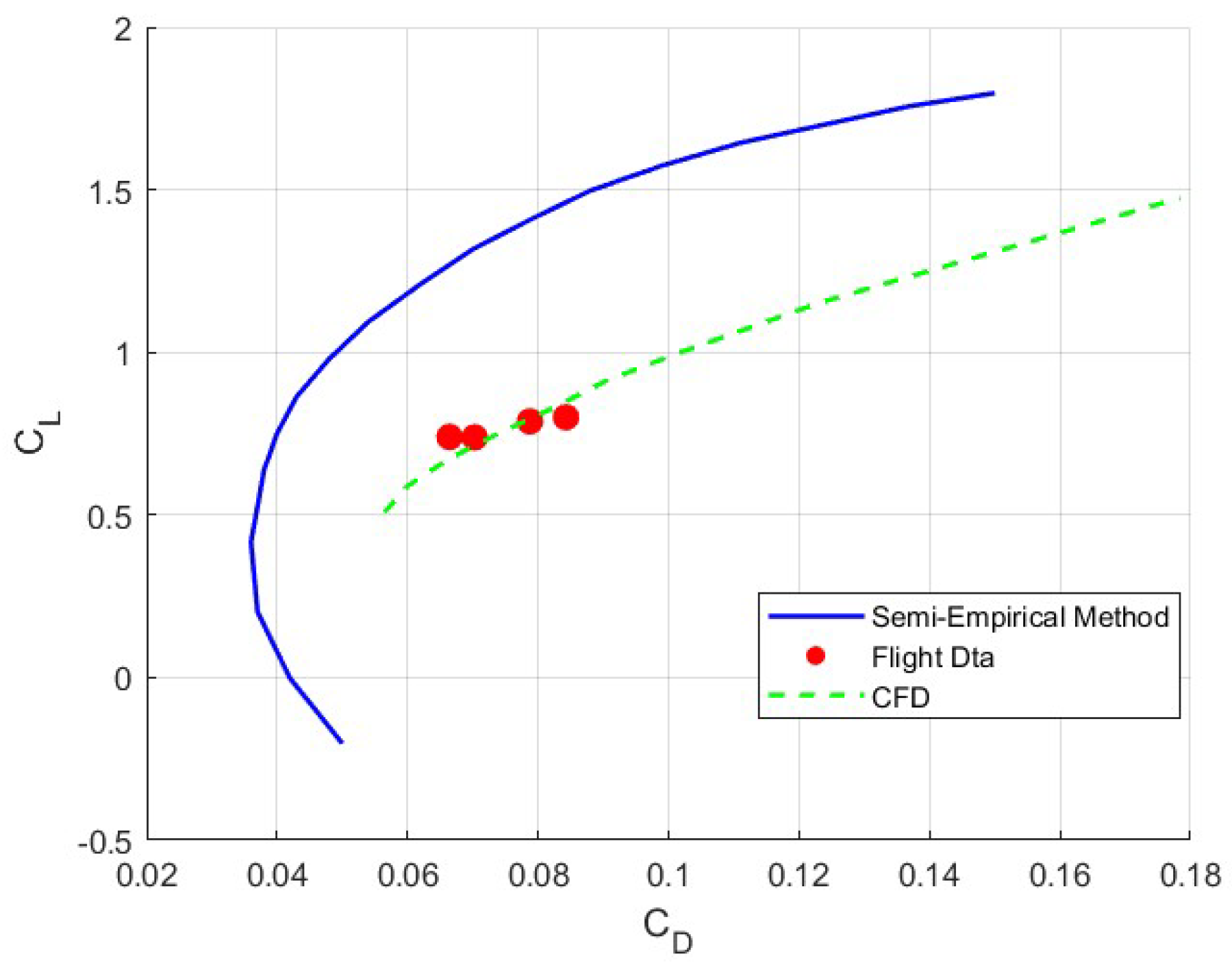
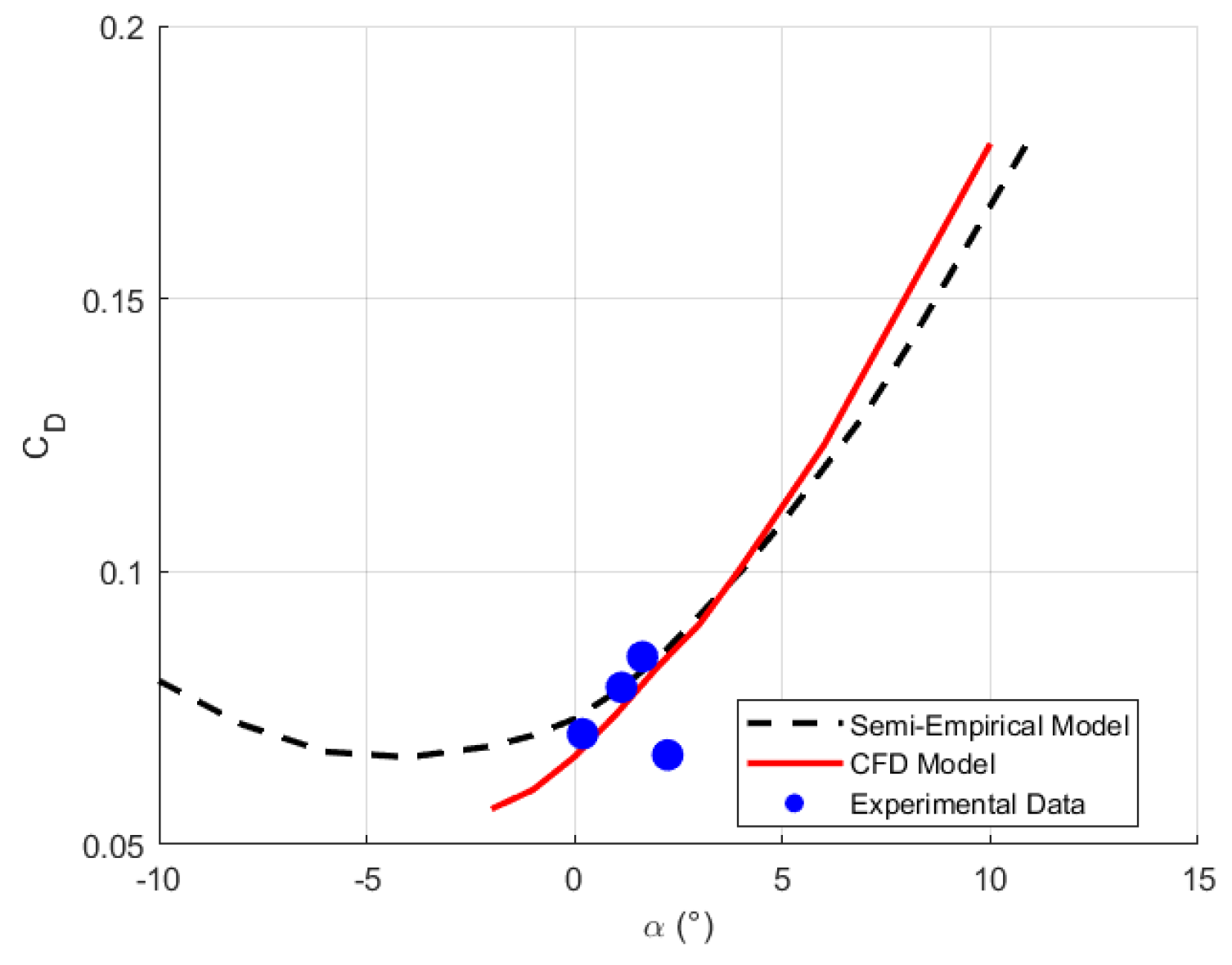
- The comparative validation against the CFD simulations and experimental flight data revealed systematic discrepancies. The most notable difference between the semi-empirical method and the CFD simulations was the offset in the estimation of the drag, where the semi-empirical method consistently underpredicted across the entire angle-of-attack range. Despite these limitations, the overall trends in the aerodynamic polar were correctly captured, indicating that the sequential analysis framework provides a reasonable first-order approximation.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- xflr5. Available online: http://www.xflr5.tech/xflr5.htm (accessed on 10 April 2024).
- Aviant. Autonomous Drone Delivery. 2024. Available online: https://www.aviant.no (accessed on 27 May 2024).
- Wing Aviation LLC. Wing—Drone Delivery Service. 2024. Available online: https://wing.com (accessed on 10 April 2025).
- Swoop Aero. 2024. Available online: https://swoop.aero/our-mission/ (accessed on 10 April 2025).
- German Drones. Advanced VTOL UAV Solutions. 2024. Available online: https://www.germandrones.com/de/ (accessed on 10 April 2025).
- Varriale, C.; Lombaerts, T.; Looye, G. Direct Lift Control: A review of its principles, merits, current and future implementations. Prog. Aerosp. Sci. 2025, 152, 101073. [Google Scholar] [CrossRef]
- Cacciola, S.; Riboldi, C.E.; Arnoldi, M. Three-Surface Model with Redundant Longitudinal Control: Modeling, Trim Optimization and Control in a Preliminary Design Perspective. Aerospace 2021, 8, 139. [Google Scholar]
- Riboldi, C.E.D.; Cacciola, S.; Ceffa, L. Studying and Optimizing the Take-Off Performance of Three-Surface Aircraft. Aerospace 2022, 9, 139. [Google Scholar] [CrossRef]
- Goetzendorf-Grabowski, T. Flight dynamics of unconventional configurations. Prog. Aerosp. Sci. 2023, 137, 100885. [Google Scholar] [CrossRef]
- Bravo-Mosquera, P.D.; Catalano, F.M.; Zingg, D.W. Unconventional aircraft for civil aviation: A review of concepts and design methodologies. Prog. Aerosp. Sci. 2022, 131, 100813. [Google Scholar] [CrossRef]
- Gallman, J.W.; Smith, S.C.; Kroo, I.M. Optimization of joined-wing aircraft. J. Aircr. 1993, 30, 897–905. [Google Scholar] [CrossRef]
- Williams, J.E.; Vukelich, S.R. The USAF Stability and Control Digital Datcom: Users Manual; Technical report; McDonnell Douglas Astronautics Company: St. Louis, MO, USA, 1979; Updated by Public Domain Aeronautical Software, 1999. [Google Scholar]
- Goetzendorf-Grabowski, T.; Figat, M. Aerodynamic and stability analysis of personal vehicle in tandem-wing configuration. Proc. Inst. Mech. Eng. Part J. Aerosp. Eng. 2017, 231, 2146–2162. [Google Scholar] [CrossRef]
- Kaya, T.; Ozgen, S. Aerodynamic Design and Control of Tandem Wing UAV. In Proceedings of the American Institute of Aeronautics and Astronautics Conference, Dallas, TX, USA, 17–21 June 2019. [Google Scholar] [CrossRef]
- Kostić, I.; Tanović, D.; Kostić, O.; Abubaker, A.A.I.; Simonović, A. Initial development of tandem wing UAV aerodynamic configuration. Aircr. Eng. Aerosp. Technol. 2022, 95, 431–441. [Google Scholar] [CrossRef]
- Jemitola, P.; Okonkwo, P. An Analysis of Aerodynamic Design Issues of Box-Wing Aircraft. Purdue Univ. J. 2023, 12, 2. [Google Scholar] [CrossRef]
- Cappelli, L.; Costa, G.; Cipolla, V.; Frediani, A. Aerodynamic Optimization of a Large PrandtlPlane Configuration. Aerotec. Missili Spaz. 2016, 95, 163–175. [Google Scholar] [CrossRef]
- Overspace Aviation. Advanced VTOL Technology. 2024. Available online: https://www.os-aviation.com (accessed on 10 April 2025).
- T-Motor. AT4130 Long Shaft Fixed-Wing Motor. 2024. Available online: https://store.tmotor.com/product/at4130-long-shaft-fixed-wing-motor.html (accessed on 10 April 2025).
- Fink, R.D. USAF Stability and Control Datcom; Afwal-tr-83-3048; Flight Dynamics Laboratories (AFWAL/FIGC), Air Force Wright Aeronautical Laboratories, Wrigth–Patterson Air Force Base: Dayton, OH, USA, 1978. [Google Scholar]
- Airfoil Tools. Airfoil Data. Available online: http://airfoiltools.com/ (accessed on 9 April 2025).
- Hoerner, S.F. Fluid-Dynamic Drag; Hoerner Fluid Dynamics: Bakersfield, CA, USA, 1965. [Google Scholar]
- Roskam, J. Airplane Design Part VI: Preliminary Calculation of Aerodynamic, Thrust and Power Characteristics; DARcorporation: Lawrence, KS, USA, 2001. [Google Scholar]
- ArduPilot. Open Source Autopilot. 2024. Available online: https://ardupilot.org (accessed on 10 April 2025).
- Klein, V.; Morelli, E.A. Aircraft System Identification: Theory and Practice; AIAA Education Series: Reston, VA, USA, 2006. [Google Scholar]
- Cacciola, S.; Bottá, L.; Riboldi, C.E.; Trainelli, L. Identification of the Impact of Blowing on the Aerodynamic Model of an Airplane with Distributed Electric Propulsion. In Proceedings of the 34th ICAS Congress Conference Proceedings, Florence, Italy, 9–13 September 2024. [Google Scholar]
- ANSYS Fluent. Computational Fluid Dynamics (CFD) Software, ANSYS Inc. 2024. Available online: https://www.ansys.com/products/fluids/ansys-fluent (accessed on 10 April 2025).
- Corcione, S.; Bonavolontà, G.; De Marco, A.; Nicolosi, F. Downwash modelling for three-lifting-surface aircraft configuration design. Chin. J. Aeronaut. 2023, 36, 161–173. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Specification | Value |
|---|---|
| Dimensions (L × W × H) | 1984 × 2000 × 481 mm |
| Flight Mass | 22.5 kg |
| Flight Altitude | 120 m |
| Standard Cruise Speed | 27 m/s |
| Max Speed | 45 m/s |
| Rear Motor | T-Motor AT4130 Long Shaft [19] |
| Propeller | APC 16 × 8 |
| Parameter | Symbol | Value |
|---|---|---|
| Reference area | 0.77 m2 | |
| Longitudinal reference length | 0.209 m | |
| Lateral reference length | 2.0 m |
| Parameter | CFD Value | Semi-Empirical Value | Percentage Error |
|---|---|---|---|
| (°) | 4.2% | ||
| 24.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cacciola, S.; Testa, L.; Saponi, M. A Procedure for Developing a Flight Mechanics Model of a Three-Surface Drone Using Semi-Empirical Methods. Aerospace 2025, 12, 515. https://doi.org/10.3390/aerospace12060515
Cacciola S, Testa L, Saponi M. A Procedure for Developing a Flight Mechanics Model of a Three-Surface Drone Using Semi-Empirical Methods. Aerospace. 2025; 12(6):515. https://doi.org/10.3390/aerospace12060515
Chicago/Turabian StyleCacciola, Stefano, Laura Testa, and Matteo Saponi. 2025. "A Procedure for Developing a Flight Mechanics Model of a Three-Surface Drone Using Semi-Empirical Methods" Aerospace 12, no. 6: 515. https://doi.org/10.3390/aerospace12060515
APA StyleCacciola, S., Testa, L., & Saponi, M. (2025). A Procedure for Developing a Flight Mechanics Model of a Three-Surface Drone Using Semi-Empirical Methods. Aerospace, 12(6), 515. https://doi.org/10.3390/aerospace12060515