
Genetic Algorithm for Optimal Control Design to Gust Response for Elastic Aircraft



Abstract
1. Introduction
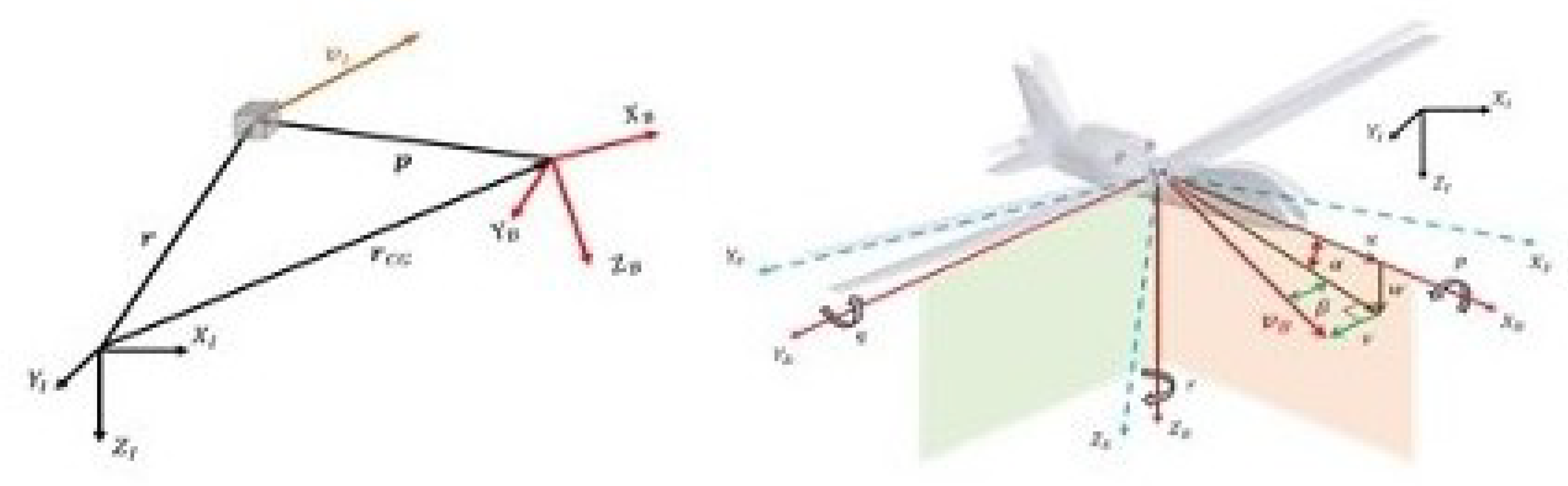
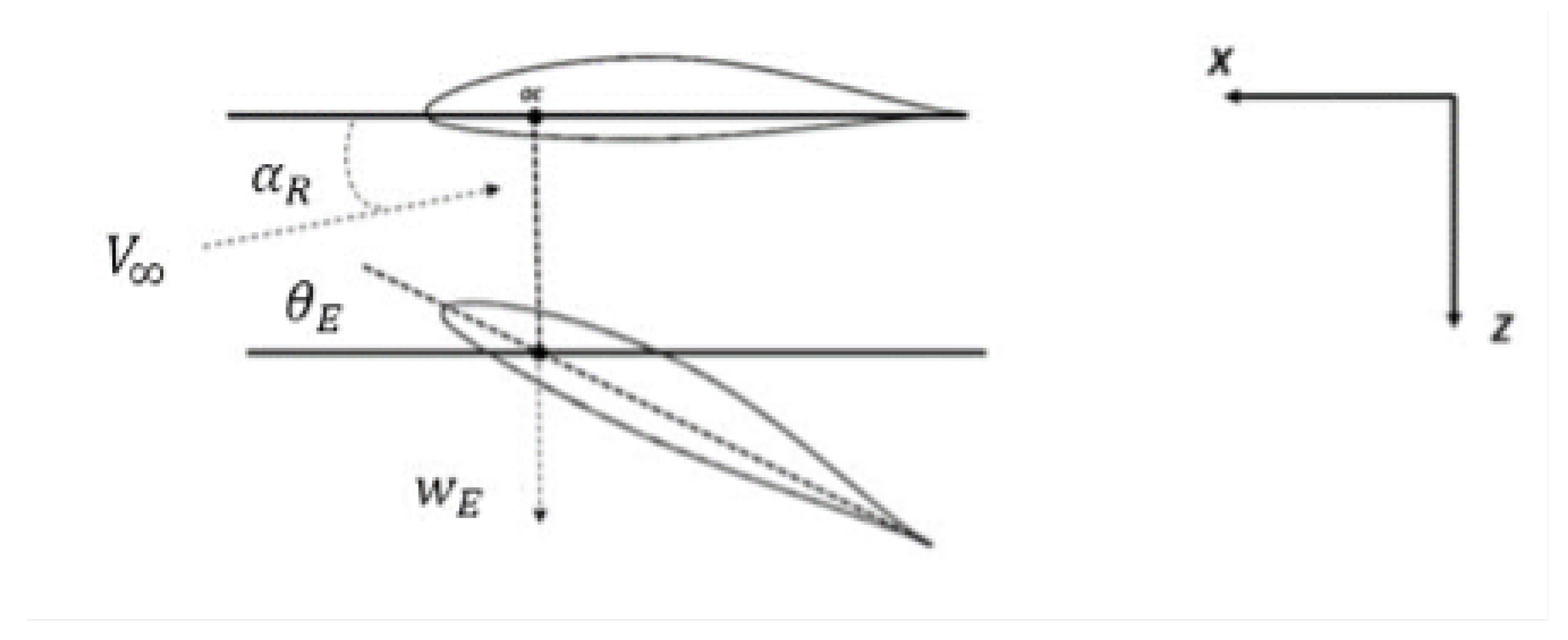
2. Notations and Reference Frames
3. Vehicle Description
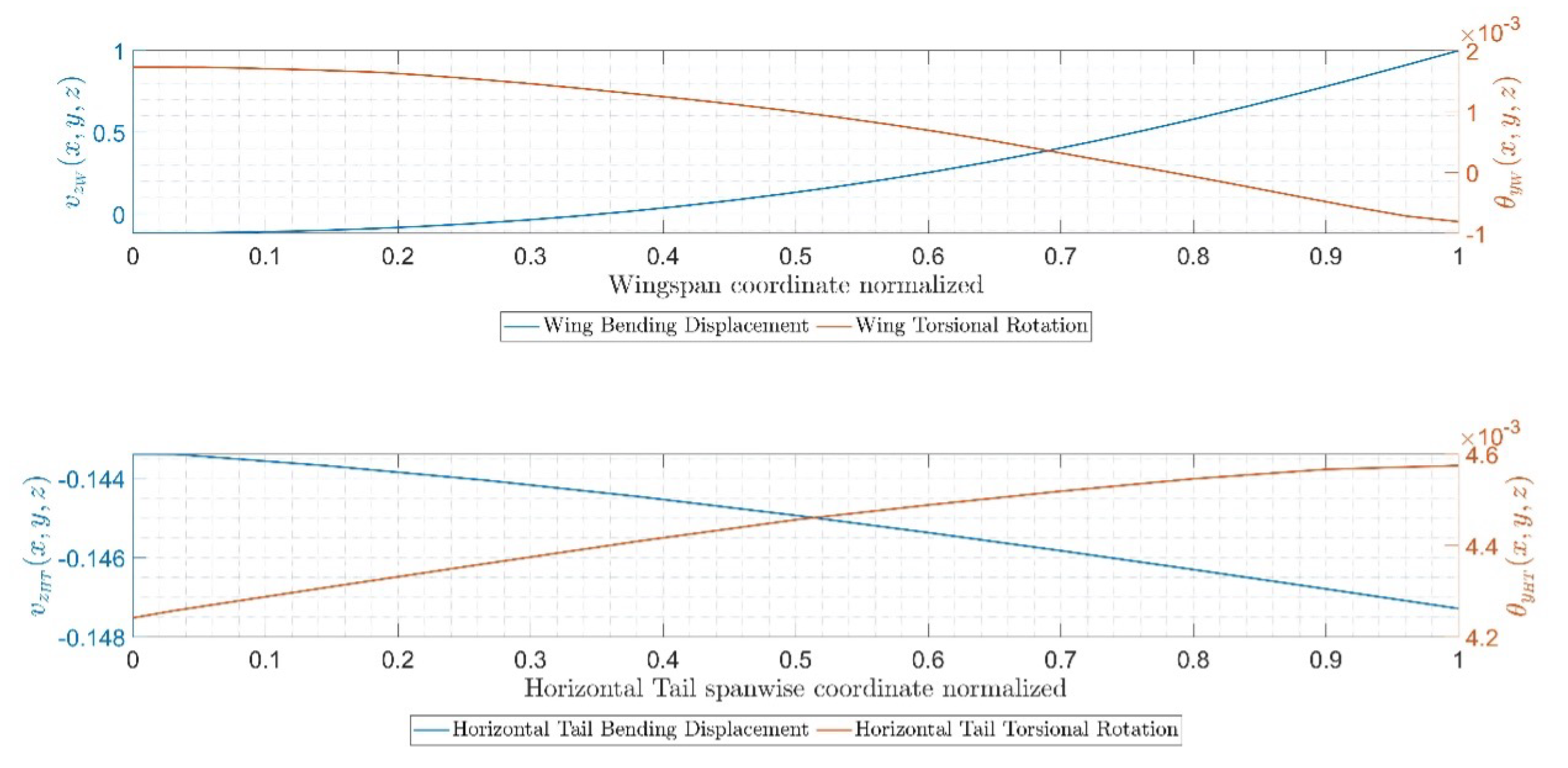
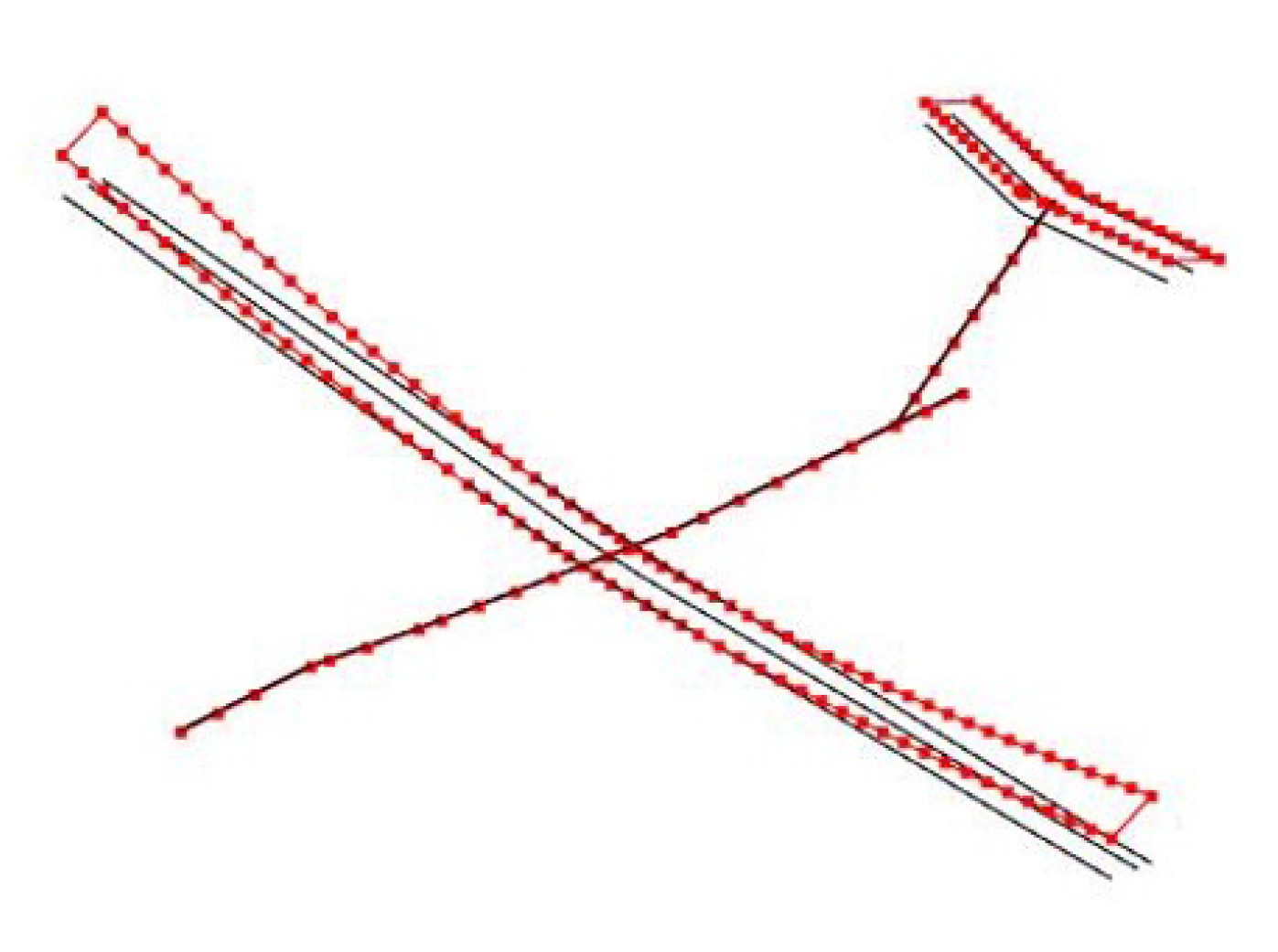
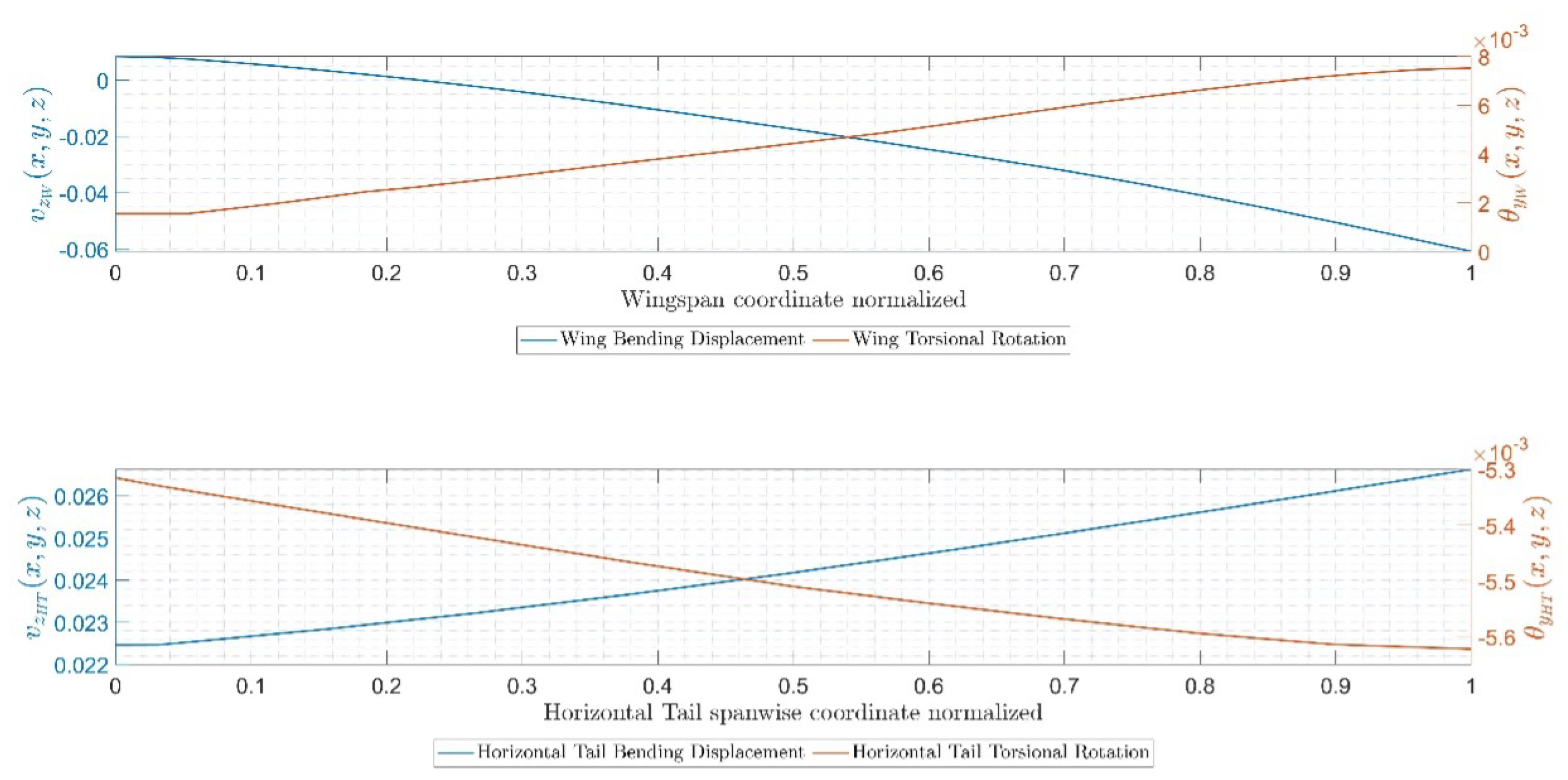
4. Finite Element Model and Modal Solution
5. Equations of the Flexible Aircraft
- T is the flexible system kinetic energy
- U is the system potential energy
- is the generalised coordinate vector
- is the vector of generalised forces acting on the vehicle
- is the virtual work given by the external force acting on the system times the virtual displacement of its application point
- is the generalised coordinate virtual displacement vector
5.1. Dynamics of the Unconstrained Flexible Body
- is the modal mass of the i-th vibrating mode
- m is the mass of the aircraft
- A rigid translational kinetic energy term ()
- A rigid rotational kinetic energy term ()
- A flexible kinetic term ()
- , and are the Euler angles
- is the generalised coordinate associated with the i-th elastic degree of freedom
- is the vector of external forces acting on the vehicle
- is the vector of external moments acting on the vehicle
- is the cross-product matrix associated with
- b wingspan
- slope of the of the airfoil of the wing at station y
- wing dynamic pressure at station y
- wing chord at station y
- aerodynamic centre coordinate of the airfoil at station y, along the longitudinal axis
- vehicle centre of gravity coordinate along X-axis
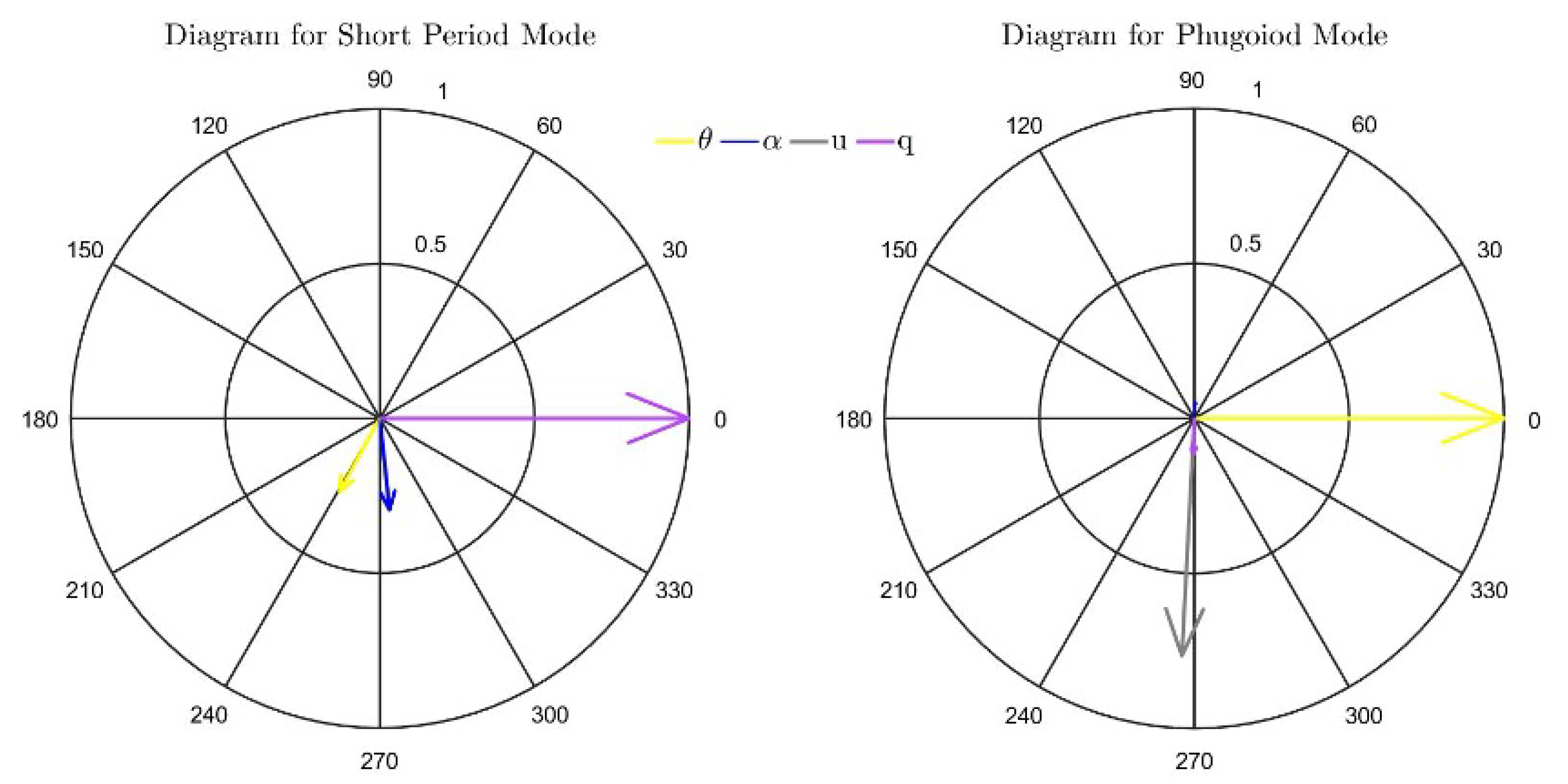
5.2. Linearised Flexible Dynamic Model
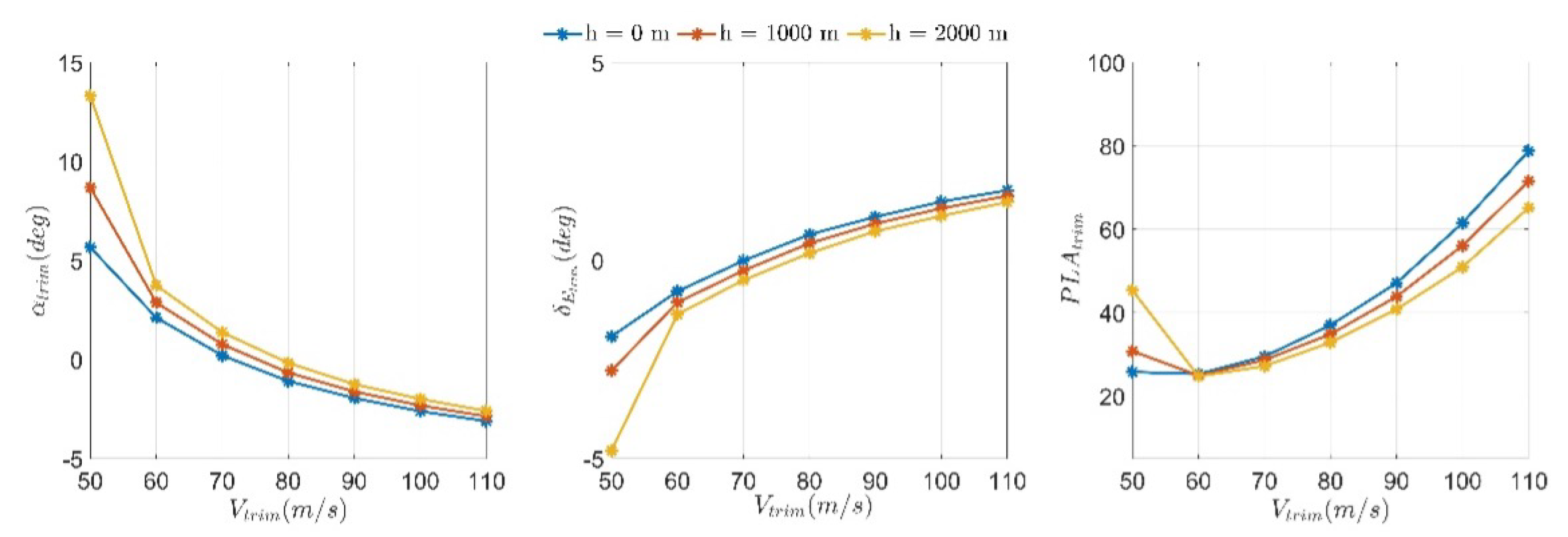
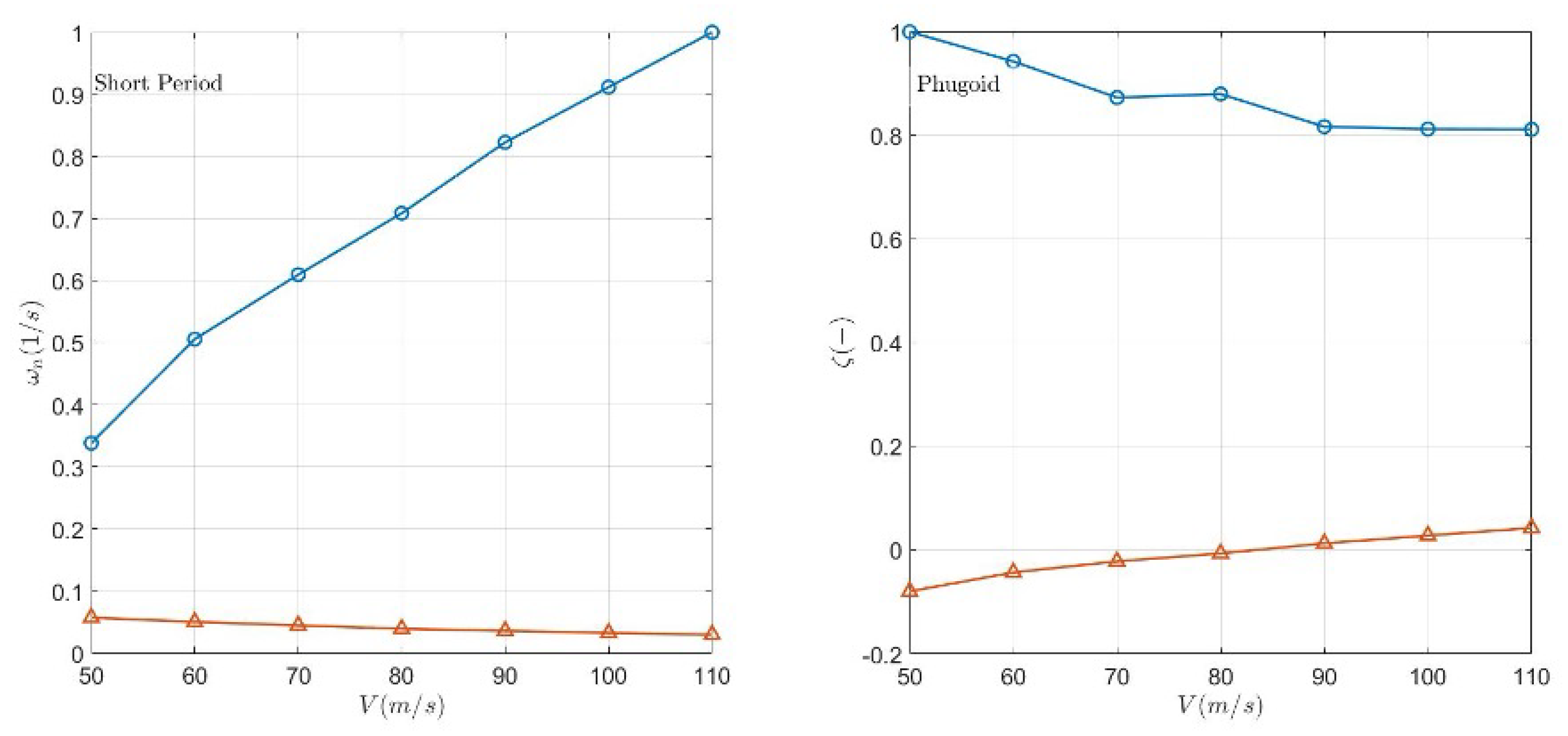
5.3. Numerical Results
6. Control Strategy for Gust Effect Reduction
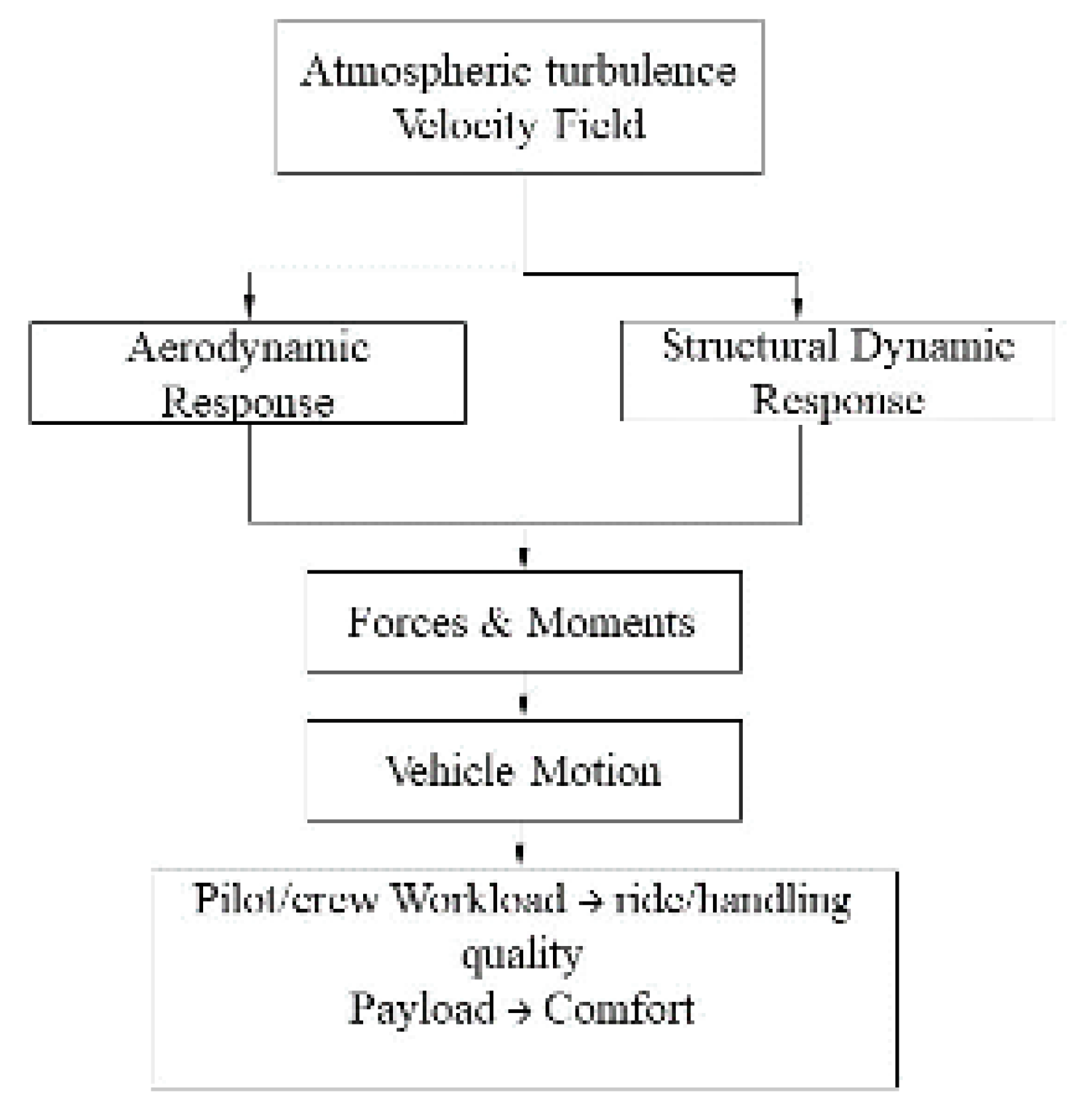
6.1. Gust Effects: Background
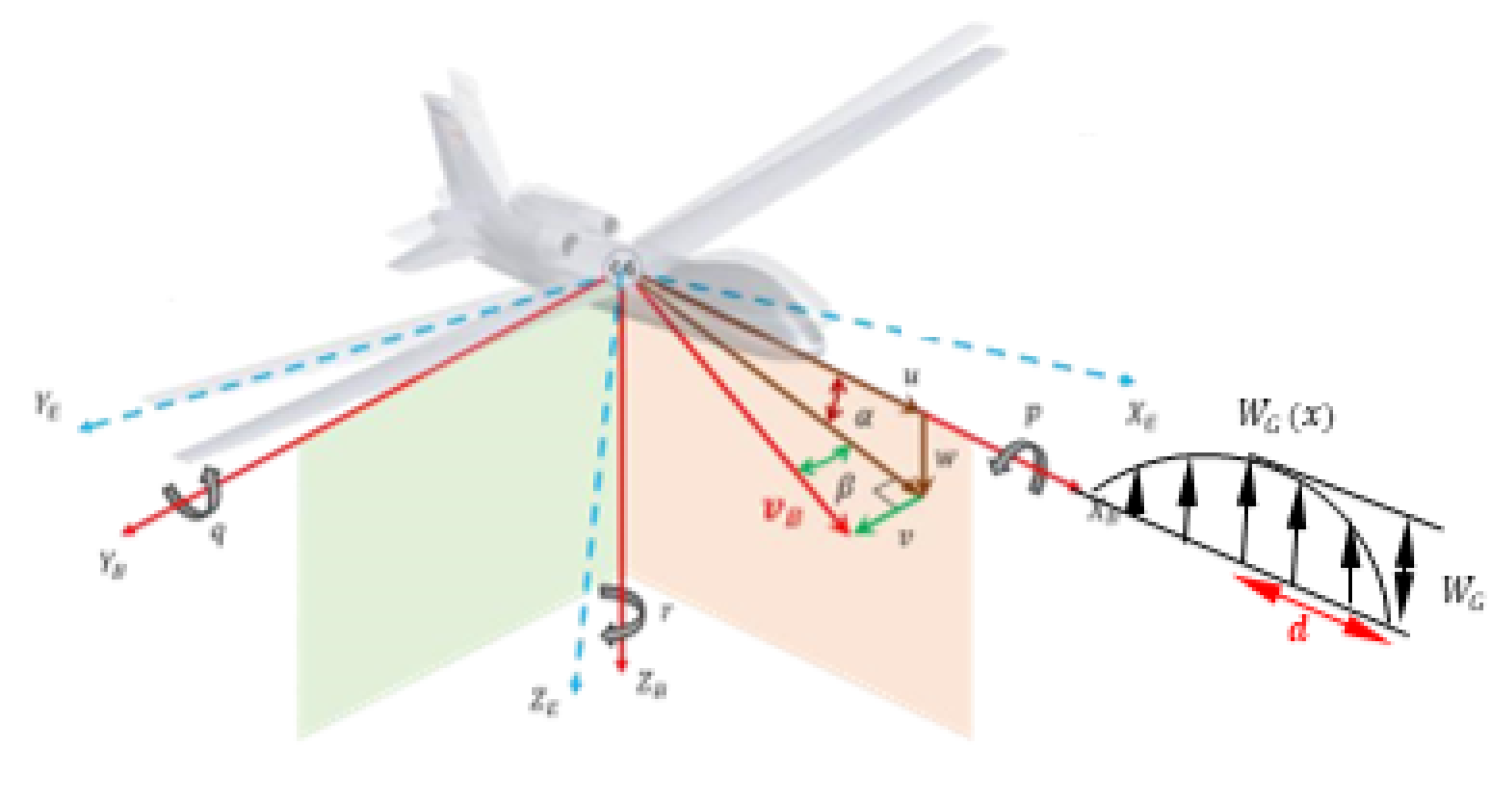
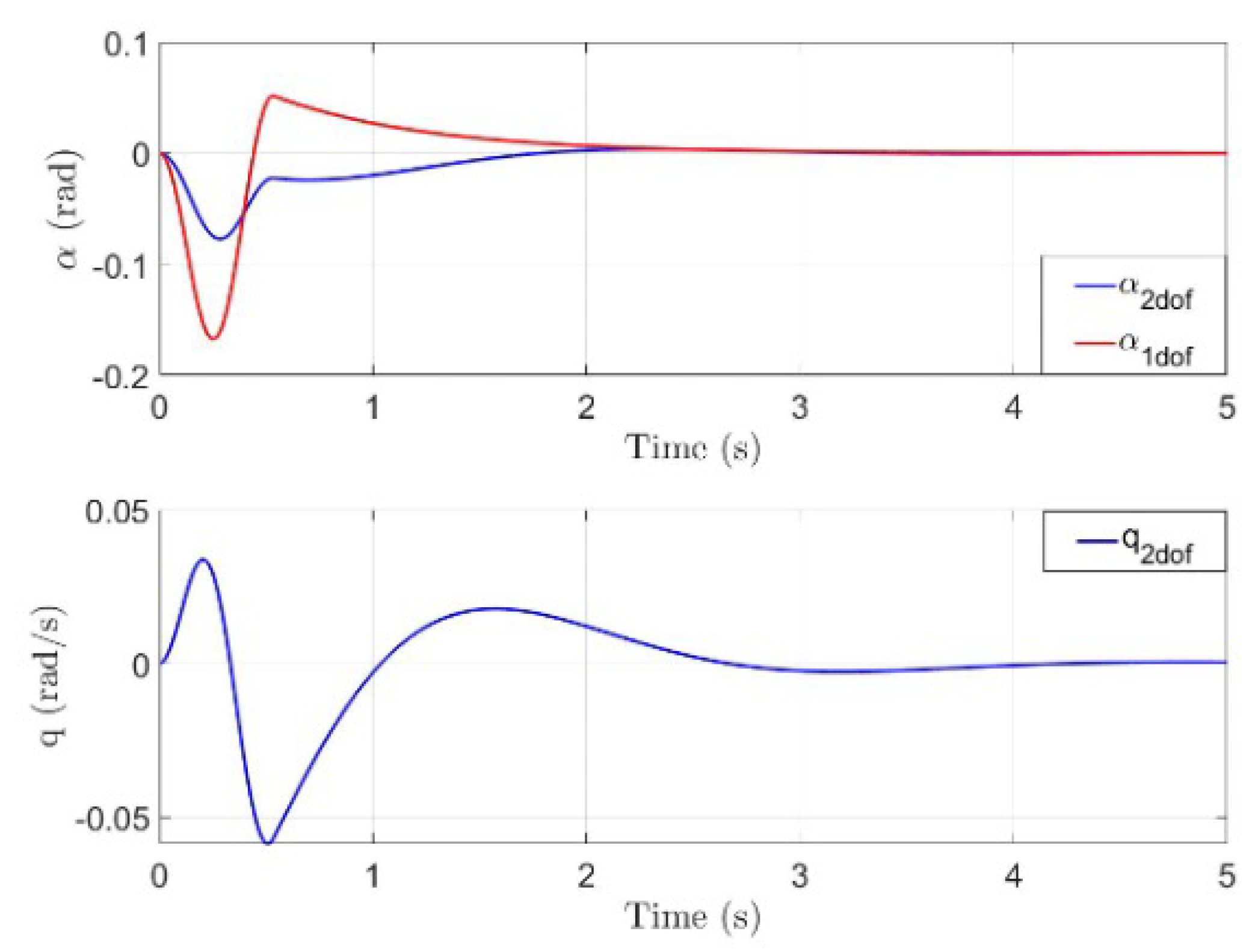
- : angle of attack due to a gust velocity profile
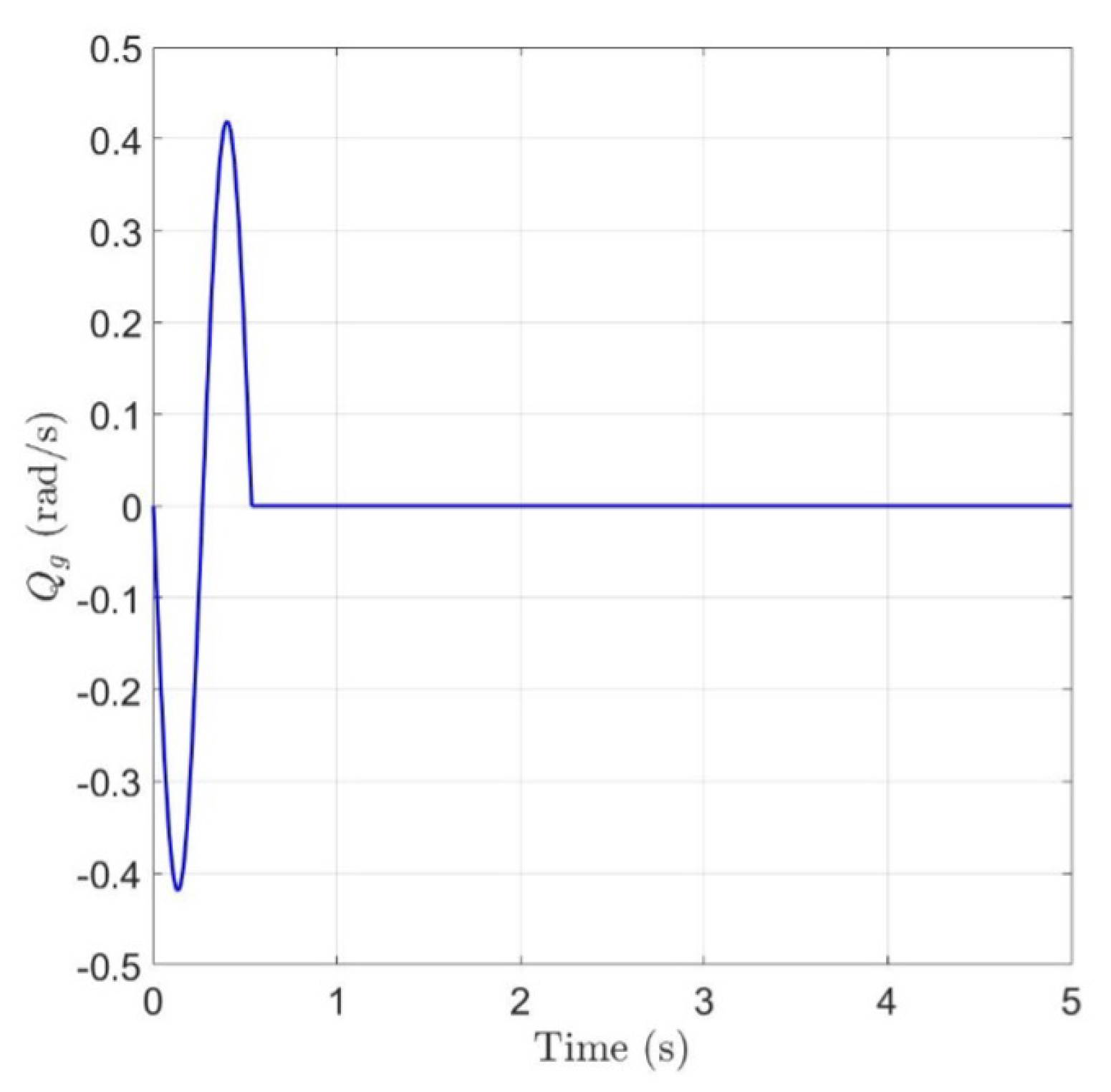
- : pitching angular velocity due to a gust profile
- is the magnitude of the vertical gust profile
- d is the gradient distance defined as a linear function of the wing chord
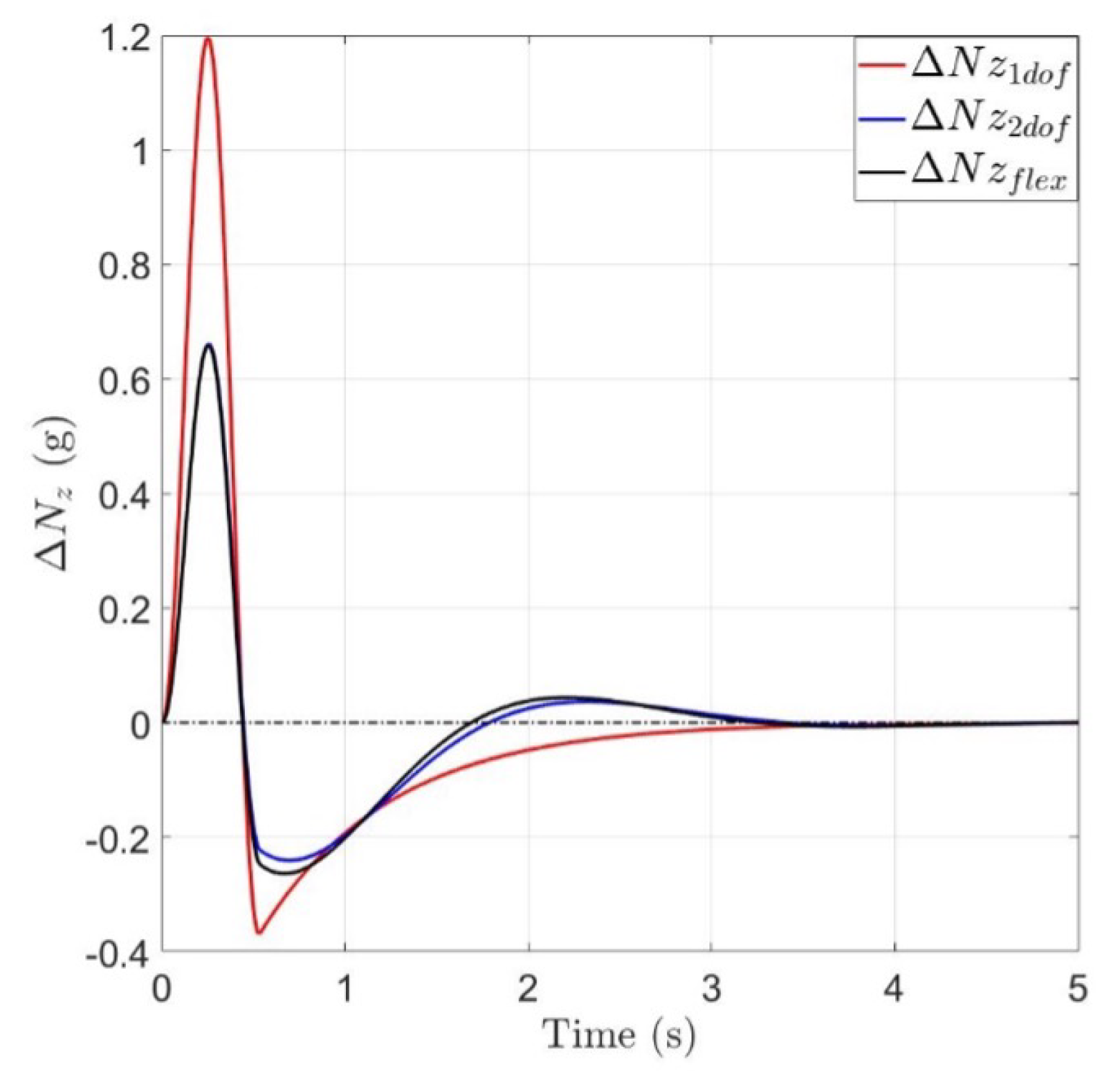
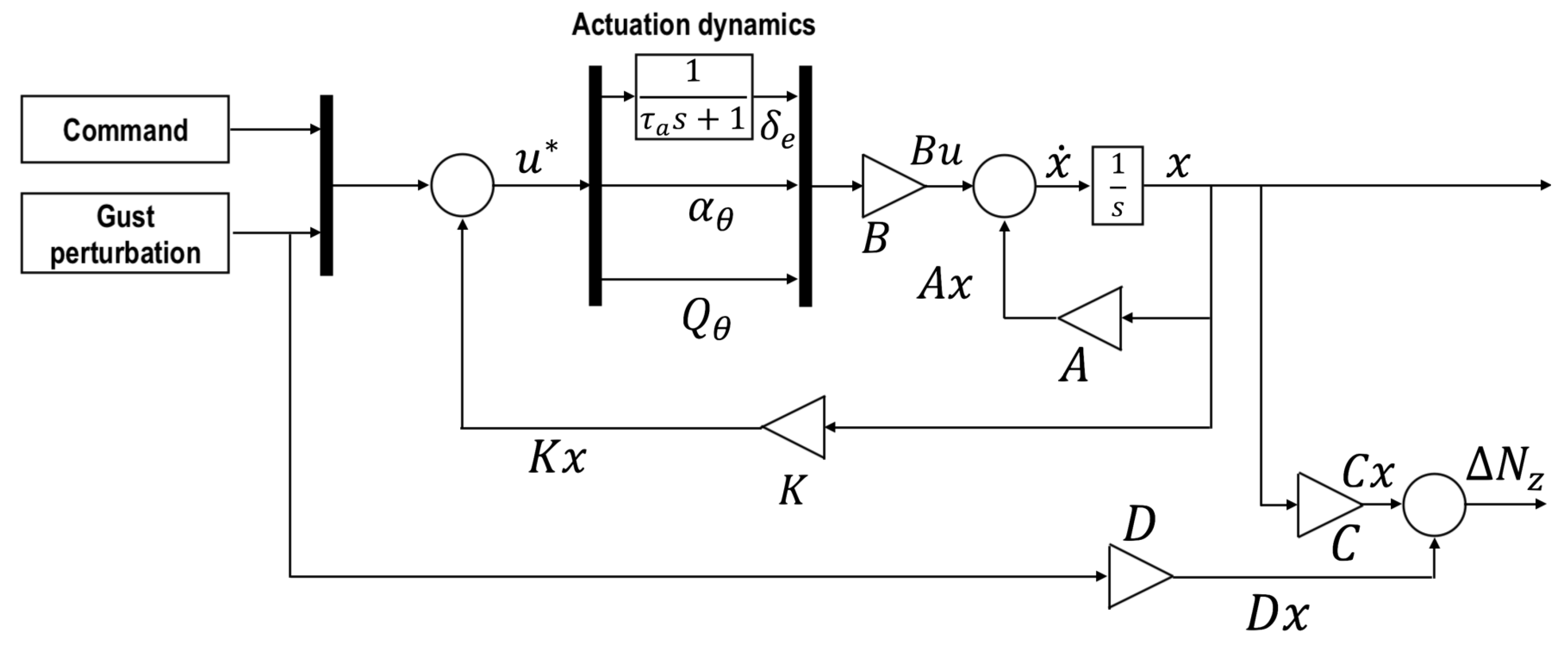
6.2. Aircraft Dynamic Response
6.3. LQR Design
- R is the matrix of weights of the input/command
- B is the control matrix
- P is the solution of the Riccati equation [19]
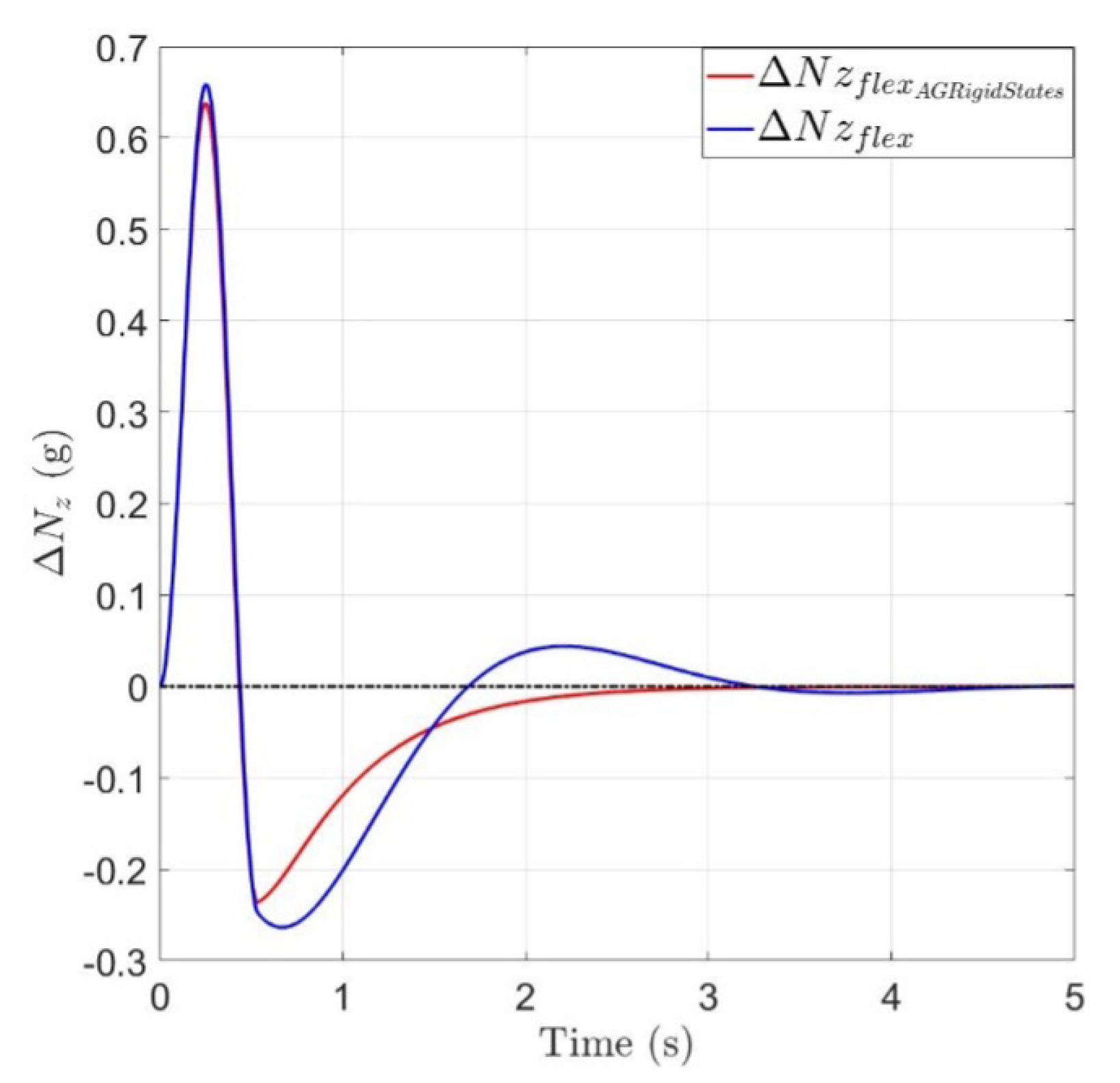
6.3.1. LQR Designed on Rigid States
6.3.2. LQR Designed on Elastic States
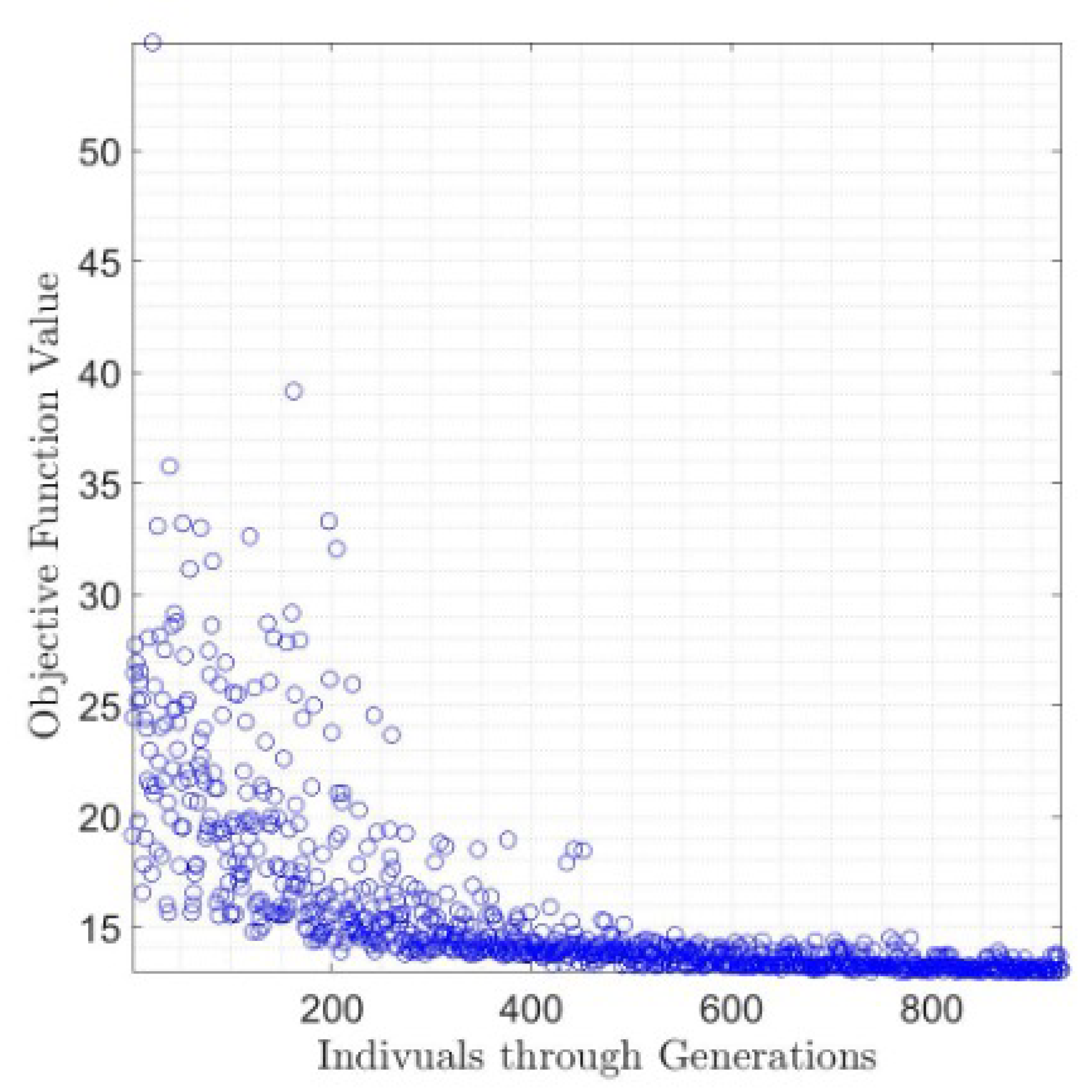
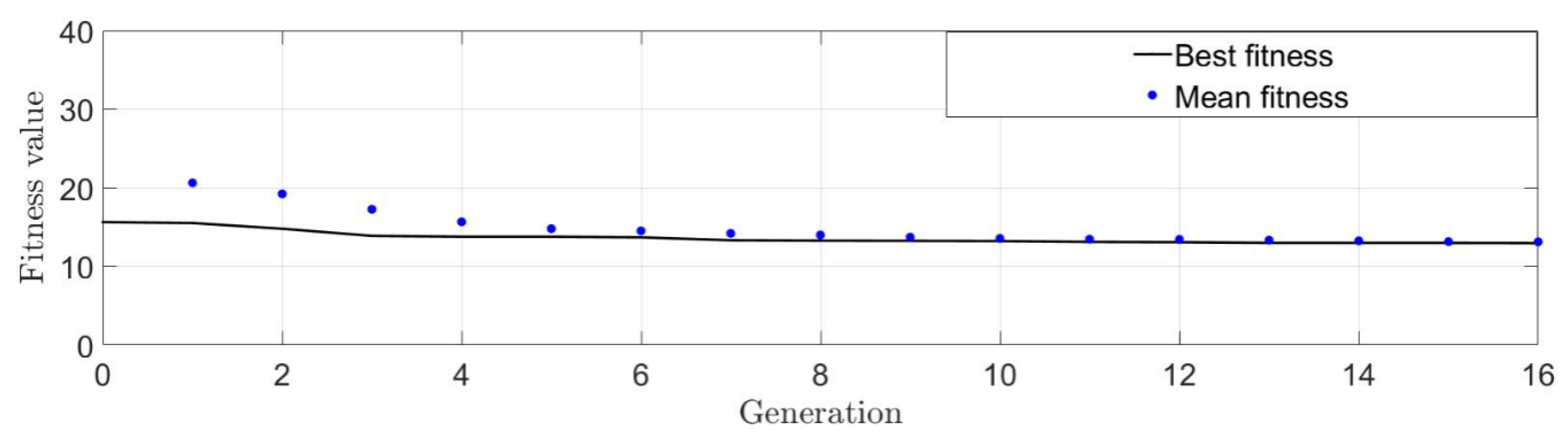
6.4. Genetic Algorithm Application
- Definition of an initial population (representing an initial set of values for the decision variables)
- Evaluation of the objective/fitness function
- Genetic crossover
- Genetic mutation
- Genetic selection
- Selection of the best genes
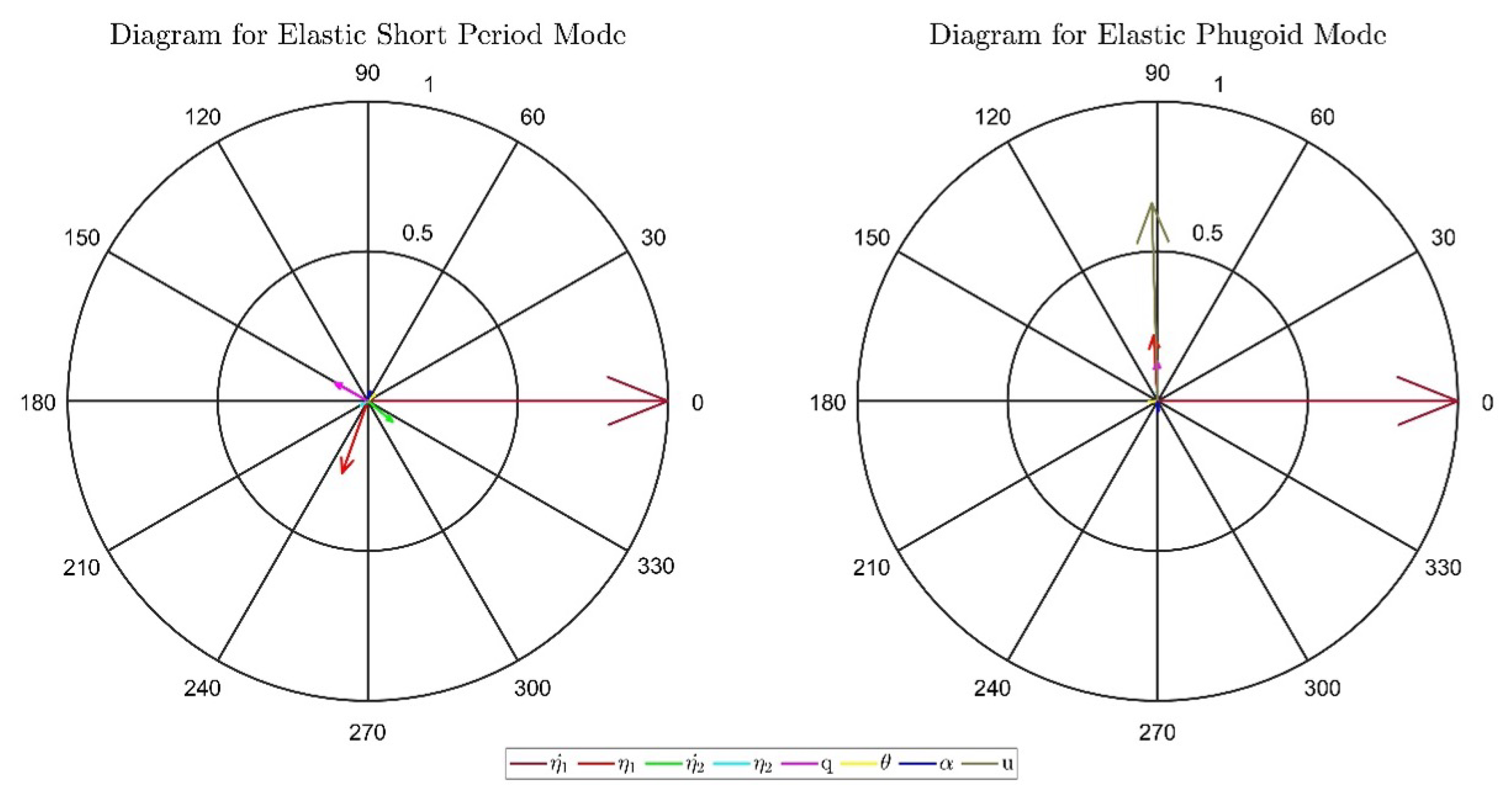
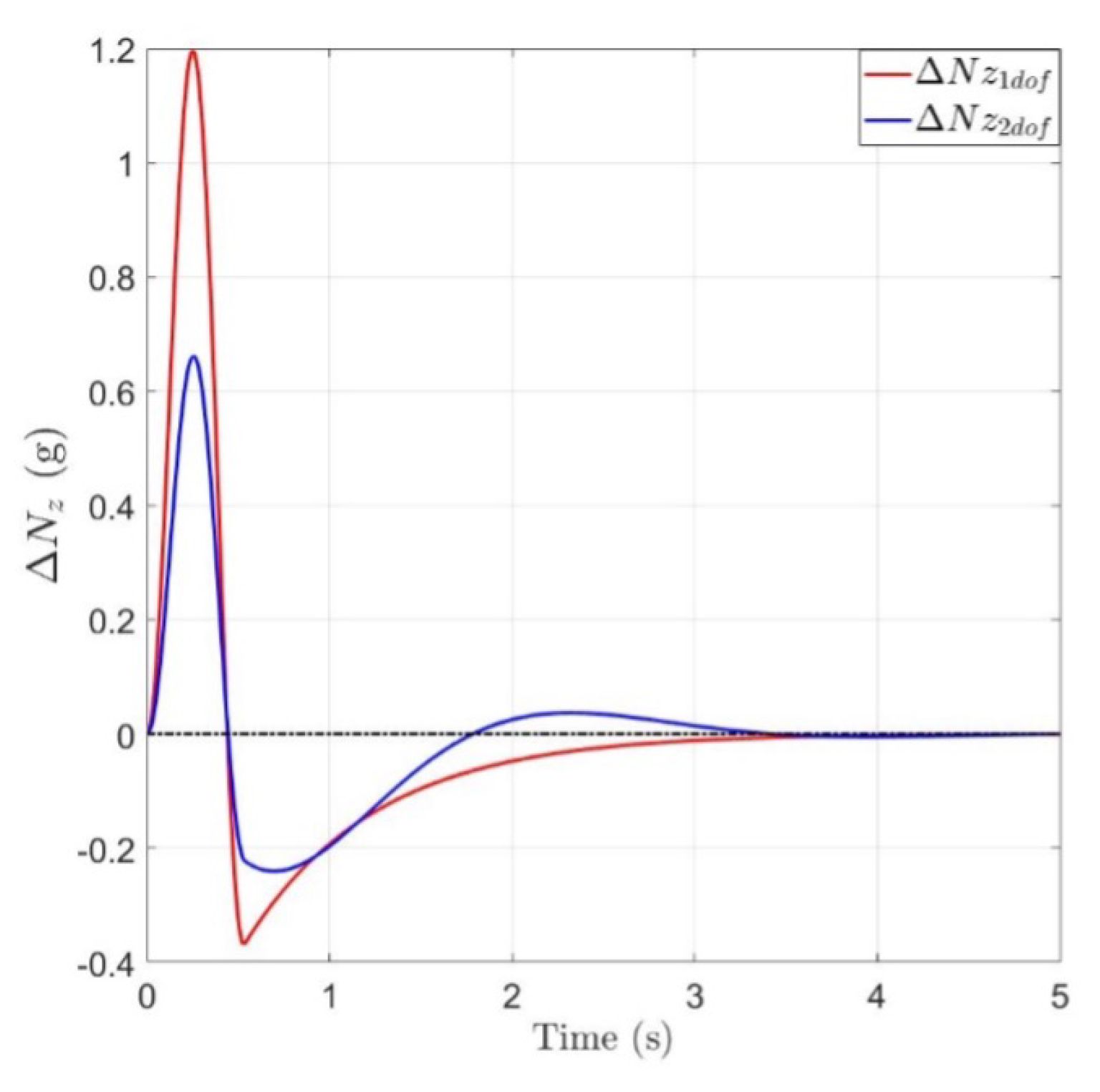
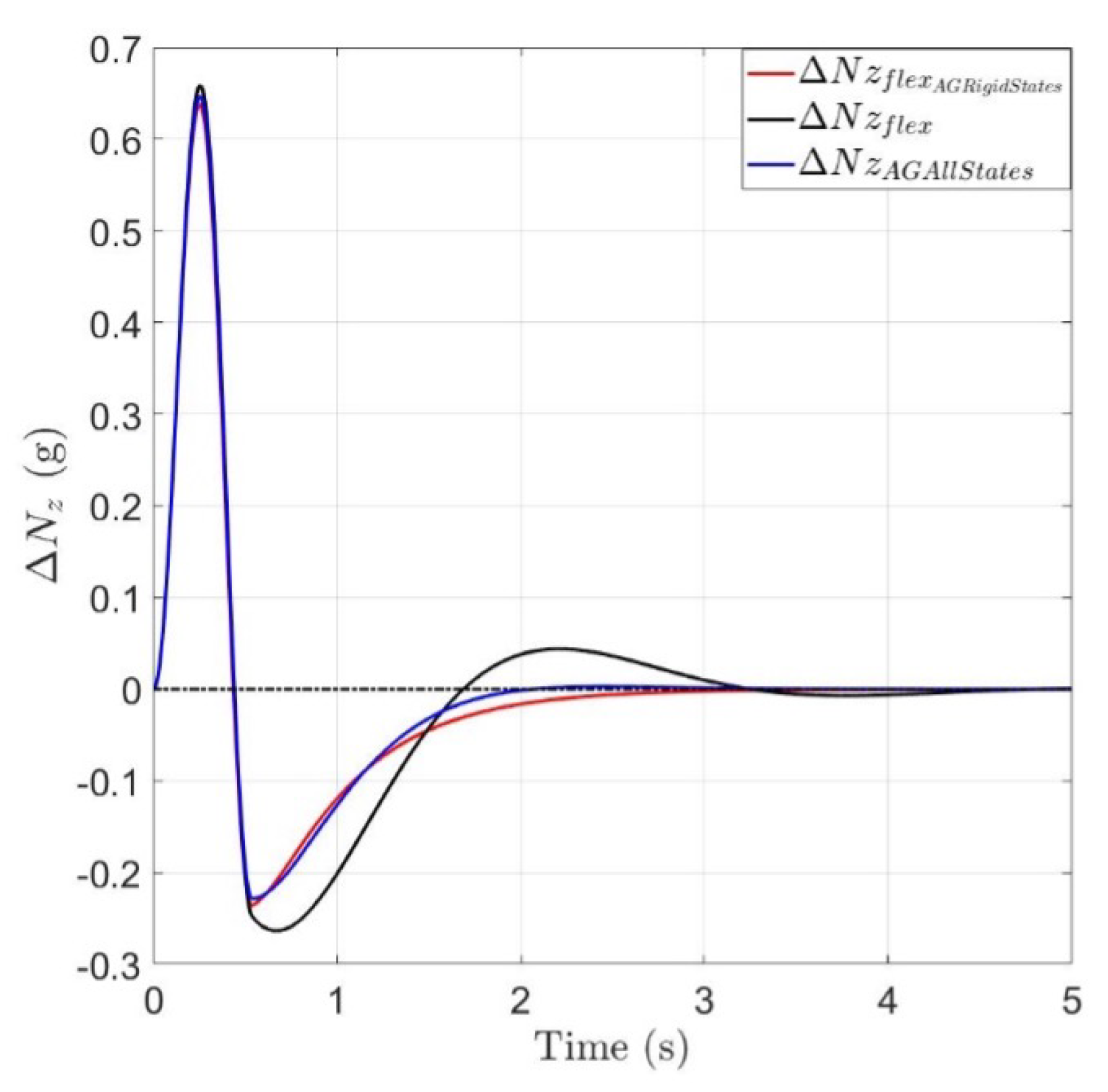
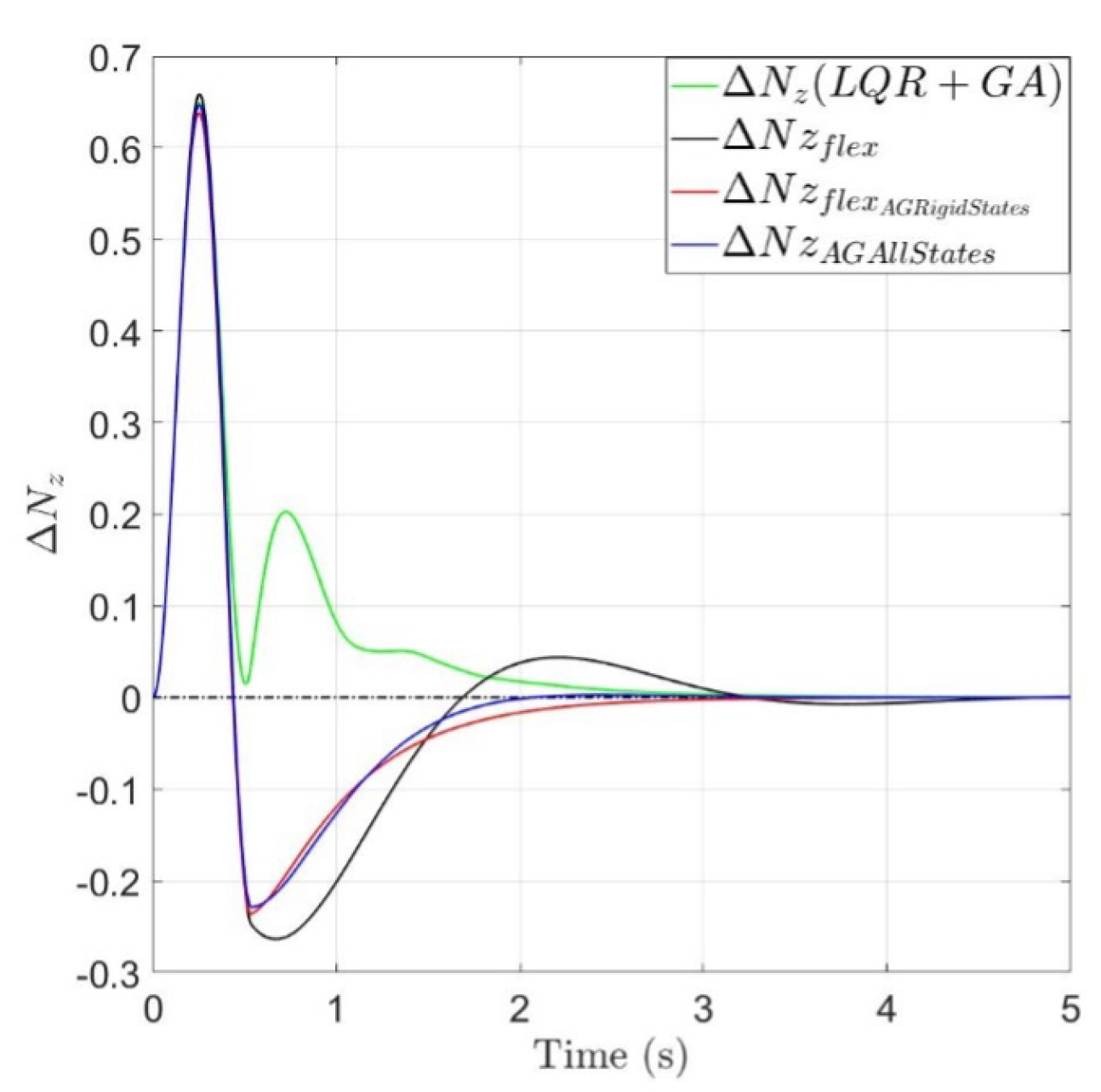
- obtained with GA application, green line, has a lower energy with respect to the other results. The response does not change sign, but there is still a second oscillation with amplitude 0.2g. The peak response is comparable with the previous one obtained only with LQR
- Rigid state shows a faster convergence, meanwhile the response in terms of q shows a more oscillating response with greater peak.
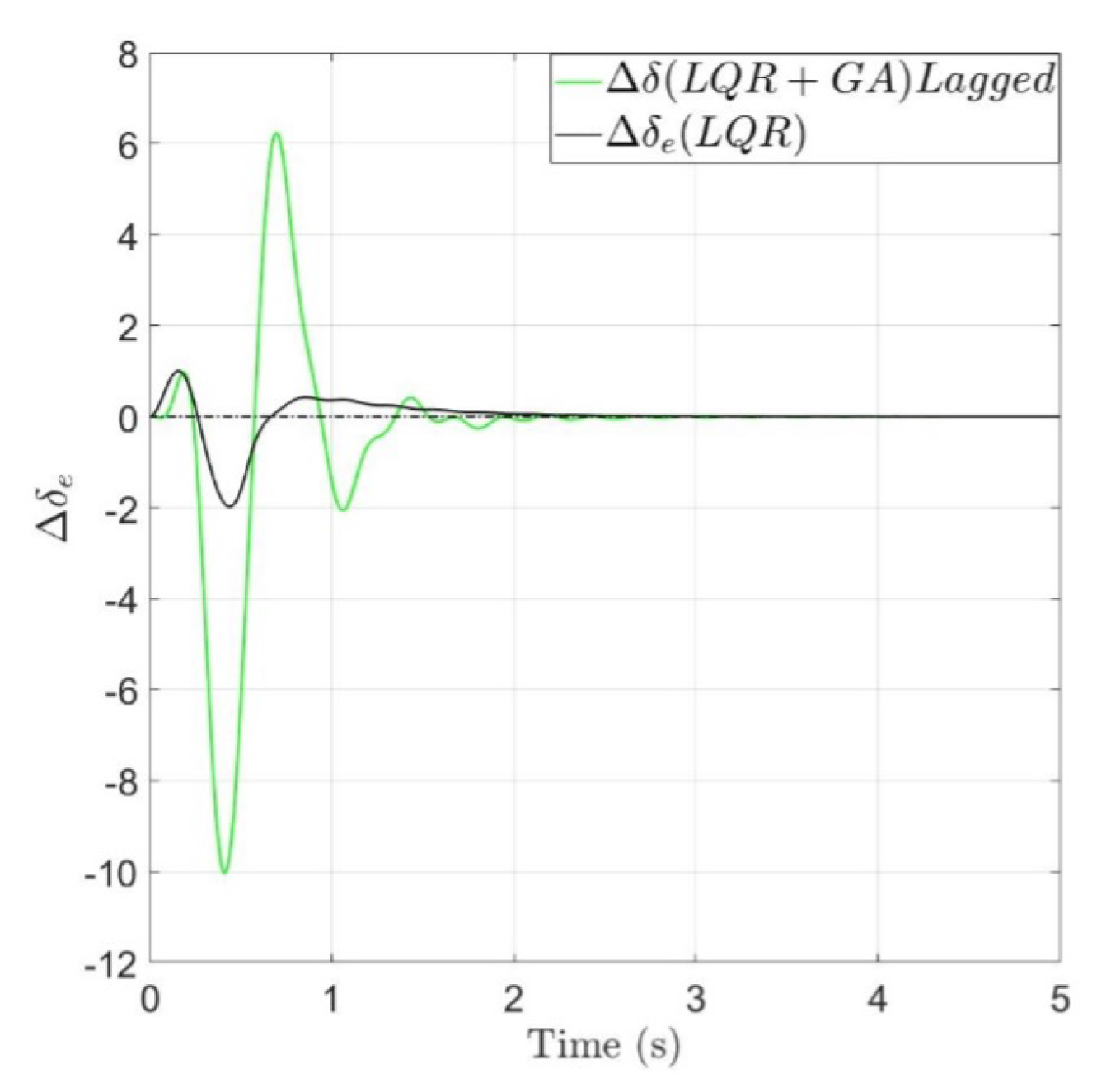
- The command activity required, green line, starts with a certain delay with respect to an instantaneous actuation, black line, due to the actuation dynamics. Peaks are greater and more numerous, however the response in terms of amplitude and actuation time is feasible.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DOAJ | Directory of open access journals |
| TLA | Three letter acronym |
| LD | Linear dichroism |
References
- Johnston, J.F. Accelerated Development and Flight Evaluation of Active Controls Concepts for Subsonic Transport Aircraft—Volume 1: Load Alleviation/Extended Span Development and Flight Tests; Technical Report NASA-CR159097; NASA: Washington, DC, USA, 1979. [Google Scholar]
- de Souza Siqueira Versiani, T.; Silvestre, F.J.; Guimarães Neto, A.B.; Rade, D.A.; Annes da Silva, R.G.; Donadon, M.V.; Bertolin, R.M.; Silva, G.C. Gust load alleviation in a flexible smart idealized wing. Aerosp. Sci. Technol. 2019, 86, 762–774. [Google Scholar] [CrossRef]
- Wright, J.R.; Cooper, J.E. Introduction to Aircraft Aeroelasticity and Loads; Aerospace Series; John Wiley & Sons: Hoboken, NJ, USA, 2008; 488p. [Google Scholar]
- Jacobson, I.D.; Joshi, D.S. Handling Qualities of Aircraft in the Presence of Simulated Turbulence. J. Aircr. 1978, 15, 254–256. [Google Scholar] [CrossRef]
- Tsushima, N.; Su, W. A study on adaptive vibration control and energy conversion of highly flexible multifunctional wings. Aerosp. Sci. Technol. 2018, 79, 297–309. [Google Scholar] [CrossRef]
- Britt, R.; Volk, J.; Dreim, D.; Applewhite, K. Aeroservoelastic Characteristics of the B-2 Bomber and Implications for Future Large Aircraft; Technical Report; Military Aircraft Systems Division, Northrop Grumman Corporation: Pico Rivera, CA, USA, 2000. [Google Scholar]
- Liu, X.; Sun, Q.; Cooper, J. LQG based model predictive control for gust load alleviation. Aerosp. Sci. Technol. 2017, 71, 499–509. [Google Scholar] [CrossRef]
- Krag, B.; Rohlf, D.; Wonnenberg, H. OLGA. A Gust Alleviation System for Improvement of Passenger Comfort of General Aviation Aircraft. In Proceedings of the International Council of the Aeronautical Sciences, Munich, Germany, 12–17 October 1980. ICAS-1980-5.4. [Google Scholar]
- Gao, Z.; Zhu, X.; Fang, Y.; Zhang, H. Active monitoring and vibration control of smart structure aircraft based on FBG sensors and PZT actuators. Aerosp. Sci. Technol. 2017, 63, 101–109. [Google Scholar] [CrossRef]
- Schmidt, D. Modern Flight Dynamics; McGraw-Hill: New York, NY, USA, 2012. [Google Scholar]
- Tuzcu, İ. On the stability of flexible aircraft. Aerosp. Sci. Technol. 2008, 12, 376–384. [Google Scholar] [CrossRef]
- Waszak, M.R.; Schmidt, D.K. Flight dynamics of aeroelastic vehicles. J. Aircr. 1988, 25, 563–571. [Google Scholar] [CrossRef]
- Schmidt, D.K.; Zhao, W.; Kapania, R.K. Flight-Dynamics and Flutter Modeling and Analyses of a Flexible Flying-Wing Drone—Invited. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar] [CrossRef]
- Schmidt, D. On the integrated control of flexible supersonic transport aircraft. In Proceedings of the Guidance, Navigation, and Control Conference, Baltimore, MD, USA, 7–10 August 1995. [Google Scholar] [CrossRef]
- Waszak, M.R.; Buttrill, C.S.; Schmidt, D.K. Modeling and Model Simplification of Aeroelastic Vehicles; Technical Report; NASA Langley Research Center: Hampton, VA, USA, 1992. [Google Scholar]
- Etkin, B.; Reid, L.D. Dynamics of Flight: Stability and Control; Wiley: Hoboken, NJ, USA, 1995. [Google Scholar]
- Junkins, J.L.; Kim, Y. Introduction to Dynamics and Control of Flexible Structures; AIAA Education Series; AIAA: New York, NY, USA, 1993. [Google Scholar]
- Nocedal, J.; Wright, S.J. Numerical Optimization, 2nd ed.; Springer Series in Operations Research and Financial Engineering; Springer: New York, NY, USA, 2006. [Google Scholar]
- Stevens, B.L.; Lewis, F.L. Aircraft Control and Simulation, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Hoblit, F.M. Gust Loads on Aircraft: Concepts and Applications; AIAA: New York, NY, USA, 1988. [Google Scholar]
- Schmidt, L.V. Introduction to Aircraft Flight Dynamics; AIAA Education Series; AIAA: Reston, VA, USA, 1998. [Google Scholar]
- United States Department of Defense. MIL-A-8861B: Airplane Strength and Rigidity, Flight Loads; Military Specification; Department of Defense: Washington, DC, USA, 1986. [Google Scholar]
- European Union Aviation Safety Agency (EASA). Certification Specifications for Normal, Utility, Aerobatic and Commuter Category Aeroplanes (CS-23); Certification specification; EASA: Cologne, Germany, 2010. [Google Scholar]
- European Union Aviation Safety Agency (EASA). Certification Specifications for Large Aeroplanes (CS-25), Amendment 10; Certification specification; EASA: Cologne, Germany, 2010; Available online: https://www.easa.europa.eu/en/document-library/certification-specifications/cs-25-amendment-10 (accessed on 1 February 2025).
- Aerodynamic Loads Estimation at Extremes of the Flight Envelope (ALEF). 2012. Available online: https://cordis.europa.eu/project/id/211785/reporting/it (accessed on 1 February 2025).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Non-Dimensional Value |
|---|---|
| Mass | <10 tons |
| Roll moment of inertia | 0.742 |
| Pitch moment of inertia | 0.245 |
| Yaw moment of inertia | 0.509 |
| Property | Non-Dimensional Value |
|---|---|
| Wing span | 18 |
| Wing surface | 26.67 |
| (distance from aircraft nose) | 5.67 |
| Elastic Modes Number | Normalised Natural Frequency | Normalised Generalised Mass M | Modal Damping |
|---|---|---|---|
| 1 | 0.285 | 0.769 | 0.02 |
| 2 | 0.579 | 0.788 | 0.02 |
| 3 | 0.629 | 0.769 | 0.02 |
| 4 | 0.802 | 1.000 | 0.02 |
| 5 | 1 | 0.639 | 0.02 |
| Option | Value |
|---|---|
| Population Size | 30 |
| EliteCount | 0.1 × (Population Size) |
| SelectionFcn | Stochastic Uniform |
| CrossoverFcn | Scattered |
| MutationFcn | AdaptFeasible |
| Number of Generations | 20 |
| Stall Generations (stopping criteria) | 15 |
| TolFun (stopping criteria) | 0.0001 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Iavarone, M.; Papa, U.; Chiesa, A.; de Pasquale, L.; Lerro, A. Genetic Algorithm for Optimal Control Design to Gust Response for Elastic Aircraft. Aerospace 2025, 12, 496. https://doi.org/10.3390/aerospace12060496
Iavarone M, Papa U, Chiesa A, de Pasquale L, Lerro A. Genetic Algorithm for Optimal Control Design to Gust Response for Elastic Aircraft. Aerospace. 2025; 12(6):496. https://doi.org/10.3390/aerospace12060496
Chicago/Turabian StyleIavarone, Mauro, Umberto Papa, Alberto Chiesa, Luca de Pasquale, and Angelo Lerro. 2025. "Genetic Algorithm for Optimal Control Design to Gust Response for Elastic Aircraft" Aerospace 12, no. 6: 496. https://doi.org/10.3390/aerospace12060496
APA StyleIavarone, M., Papa, U., Chiesa, A., de Pasquale, L., & Lerro, A. (2025). Genetic Algorithm for Optimal Control Design to Gust Response for Elastic Aircraft. Aerospace, 12(6), 496. https://doi.org/10.3390/aerospace12060496