
Predefined-Time Robust Control for a Suspension-Based Gravity Offloading System †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
- (1)
- (2)
- A predefined-time robust controller integrated with a predefined-time observer is proposed to address unmodeled dynamics and unknown disturbances in SGO systems. Compared with the methods presented in [33,39], the proposed approach can effectively guarantee predefined-time convergence of the SGO system.
- (3)
- A pneumatic artificial muscle (PAM) structure is introduced to address the underactuation and control bandwidth limitation issues arising from the use of passive springs for impact disturbance attenuation in traditional SGO systems. Finally, the effectiveness and superiority of the proposed control framework are validated through extensive simulations and physical experiments.
2. System Modeling
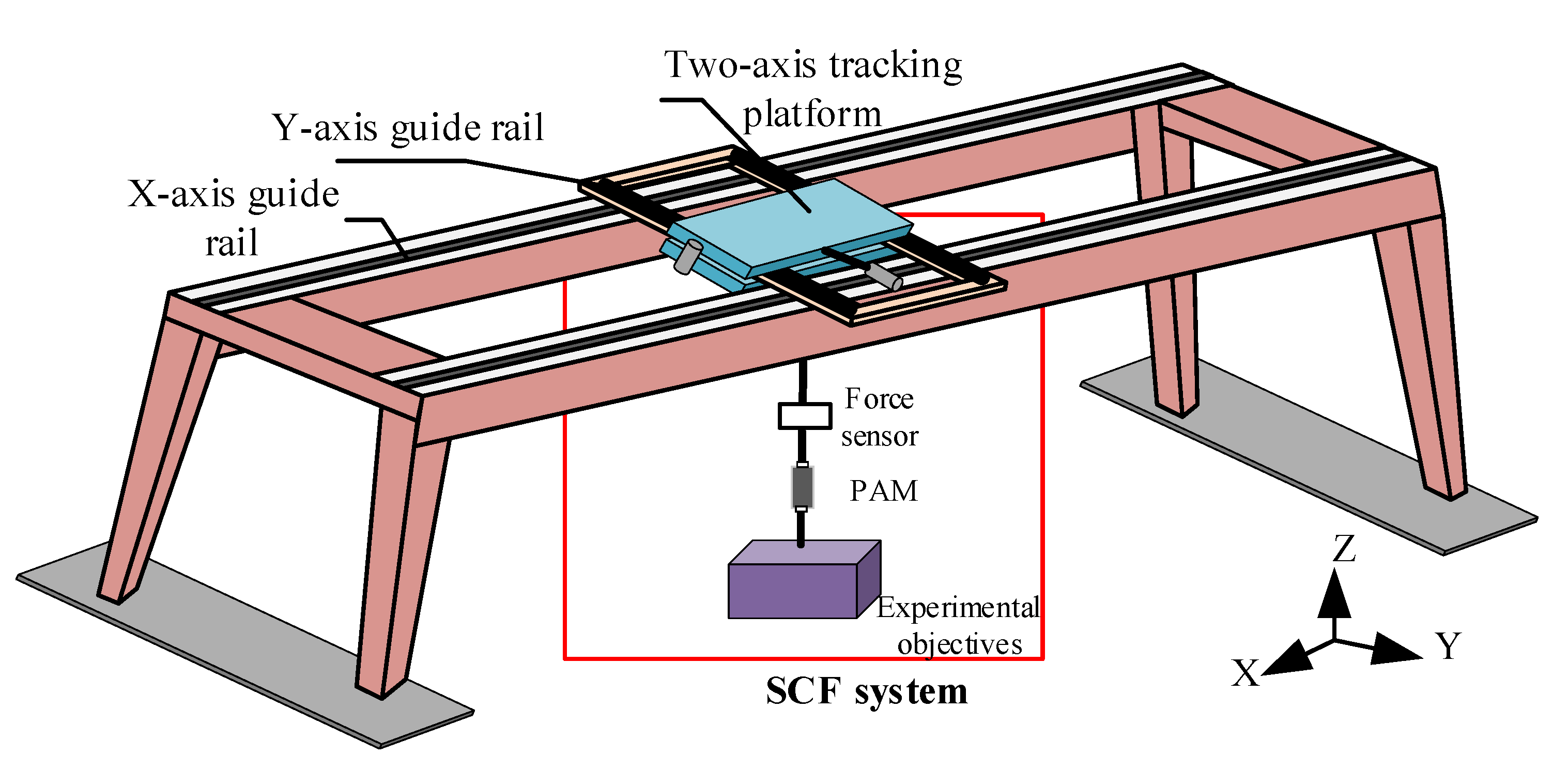
2.1. Suspension Gravity Offload Platform
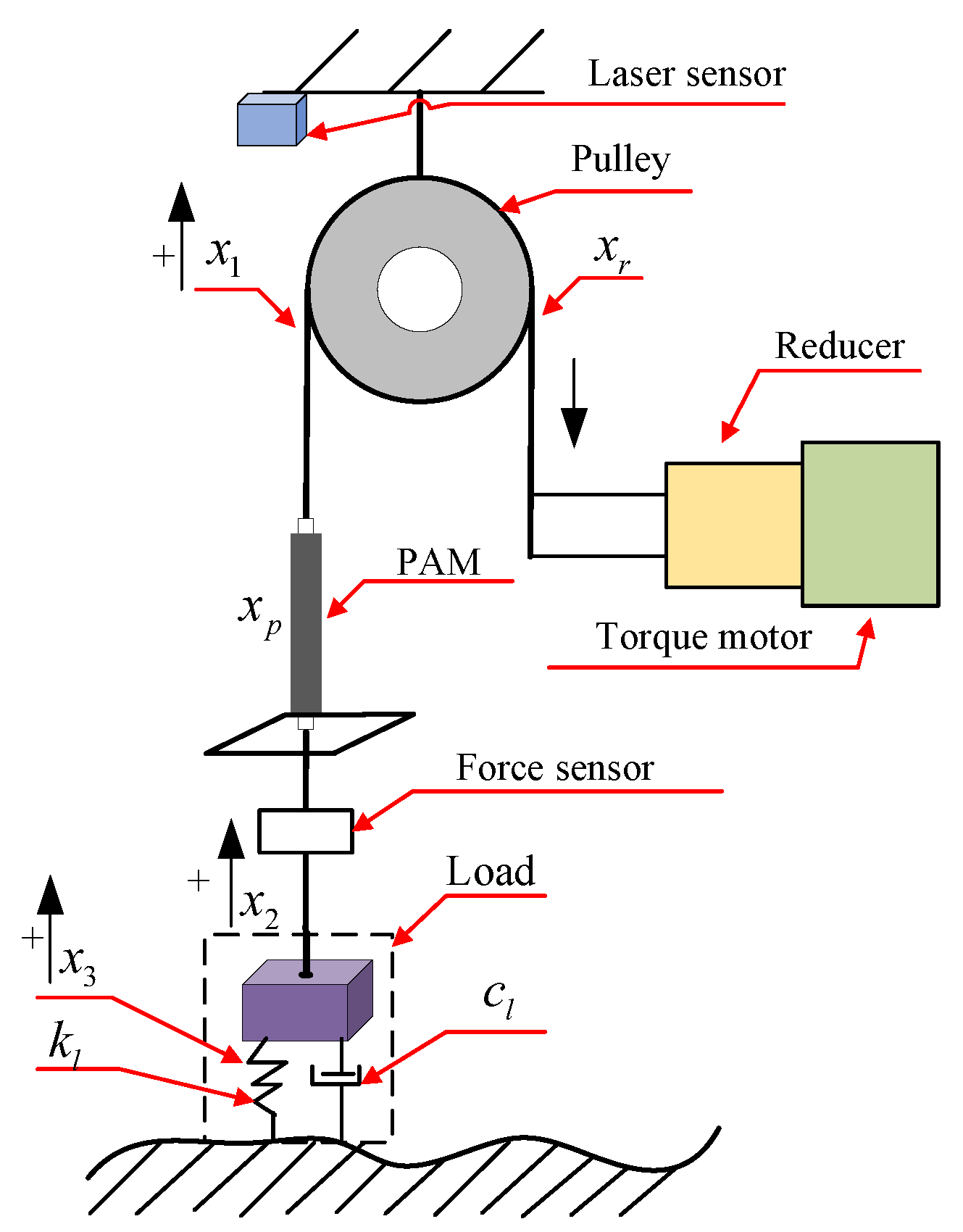
2.2. Mathematical Model of SCF
2.3. Control Objective
3. Predefined-Time Control and Observer Design
3.1. Predefined Time Convergence Criteria
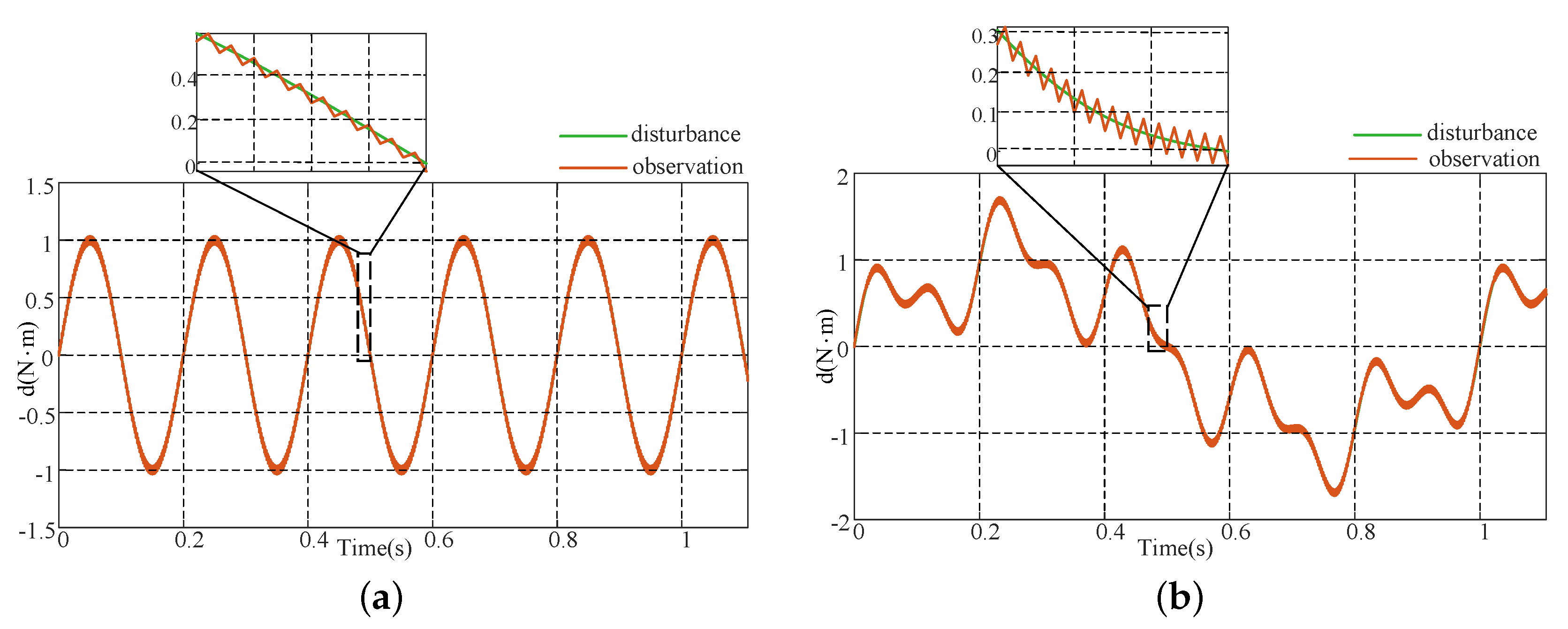
3.2. Predefined-Time Disturbance Observer Design
3.3. Controller Design for the Descent Phase
3.4. Controller Design for the Landing Buffering Phase
4. Numerical Simulations
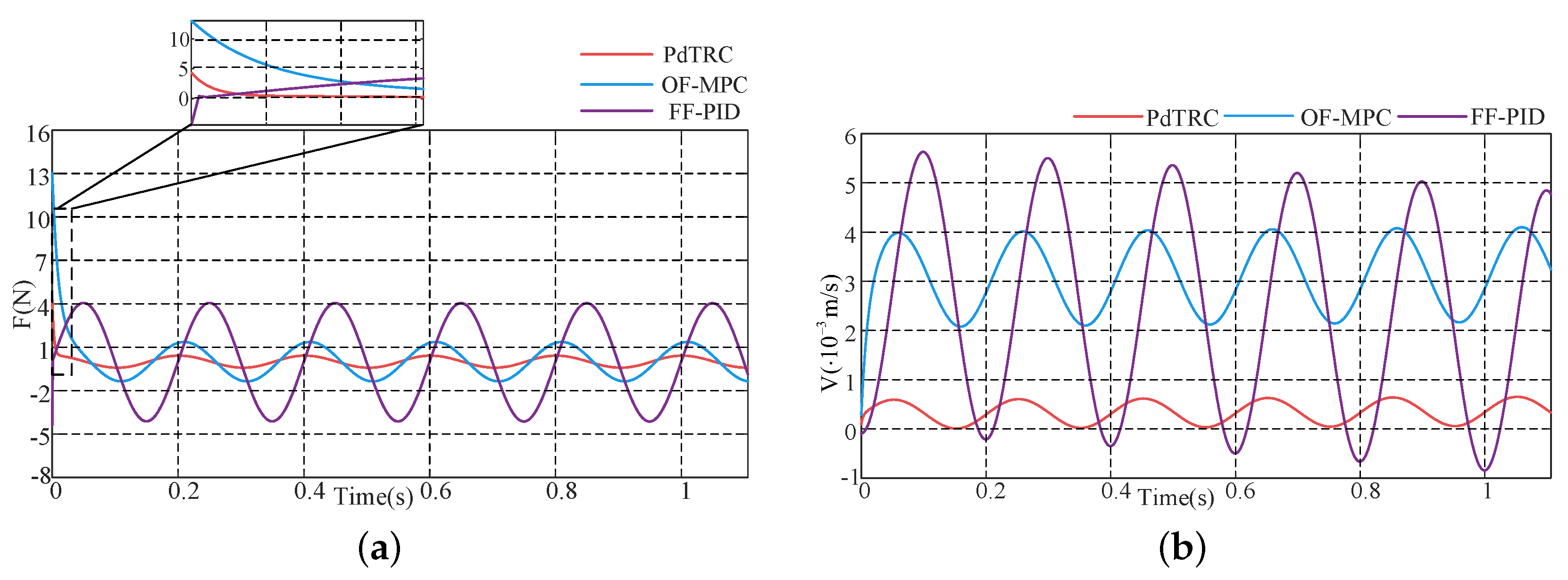
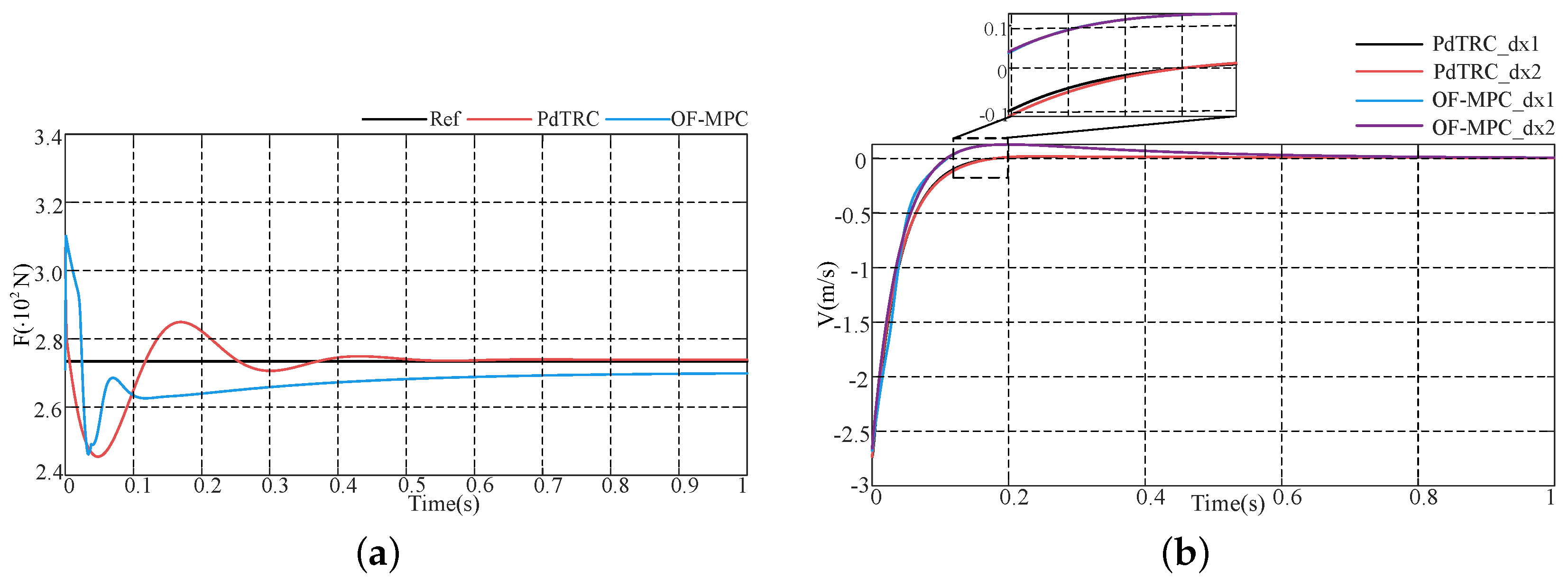
4.1. The Numerical Simulation for Descent Phase
4.2. The Numerical Simulation for Landing Buffering Phase
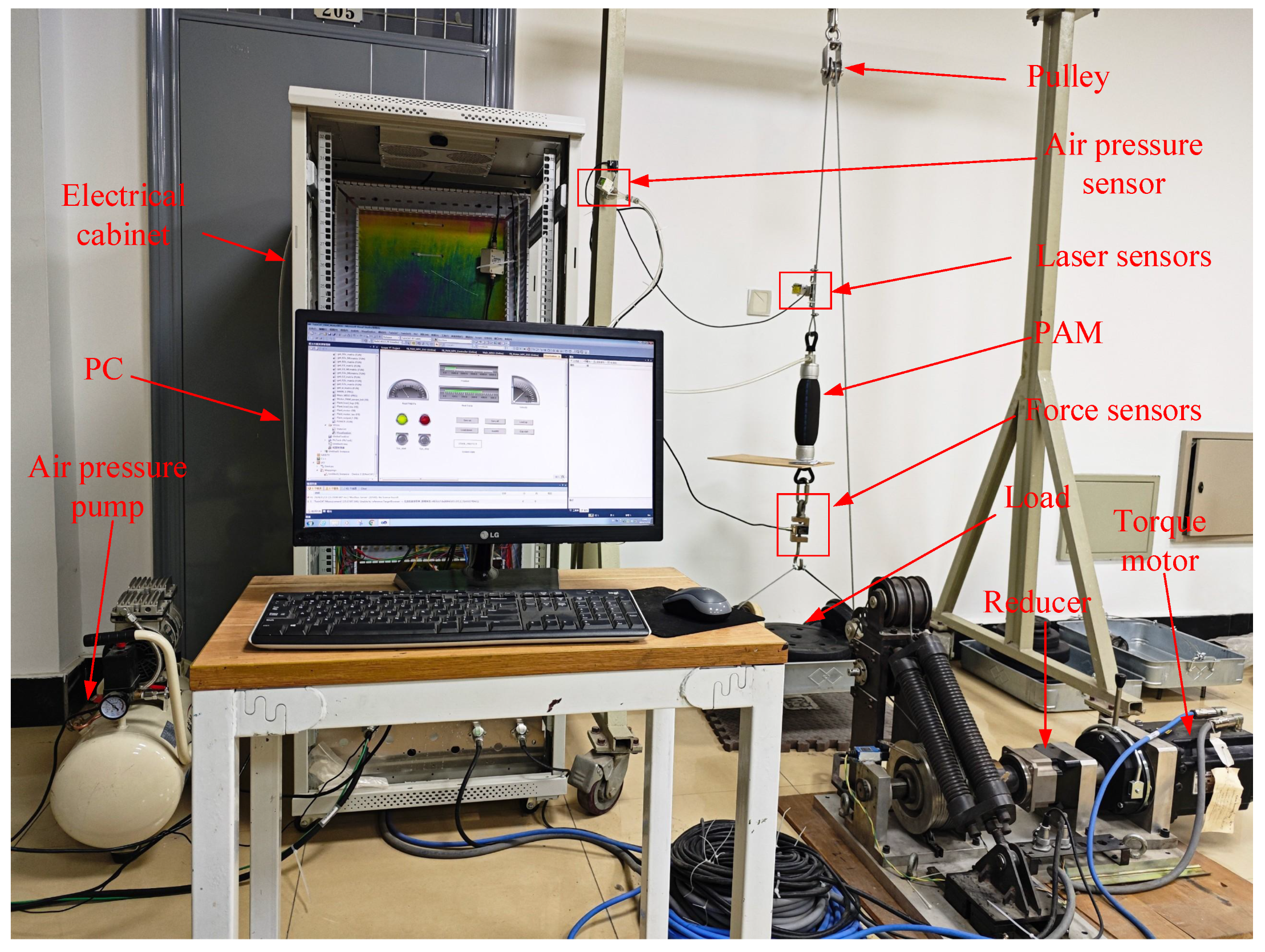
5. Physical Experiments
- A.
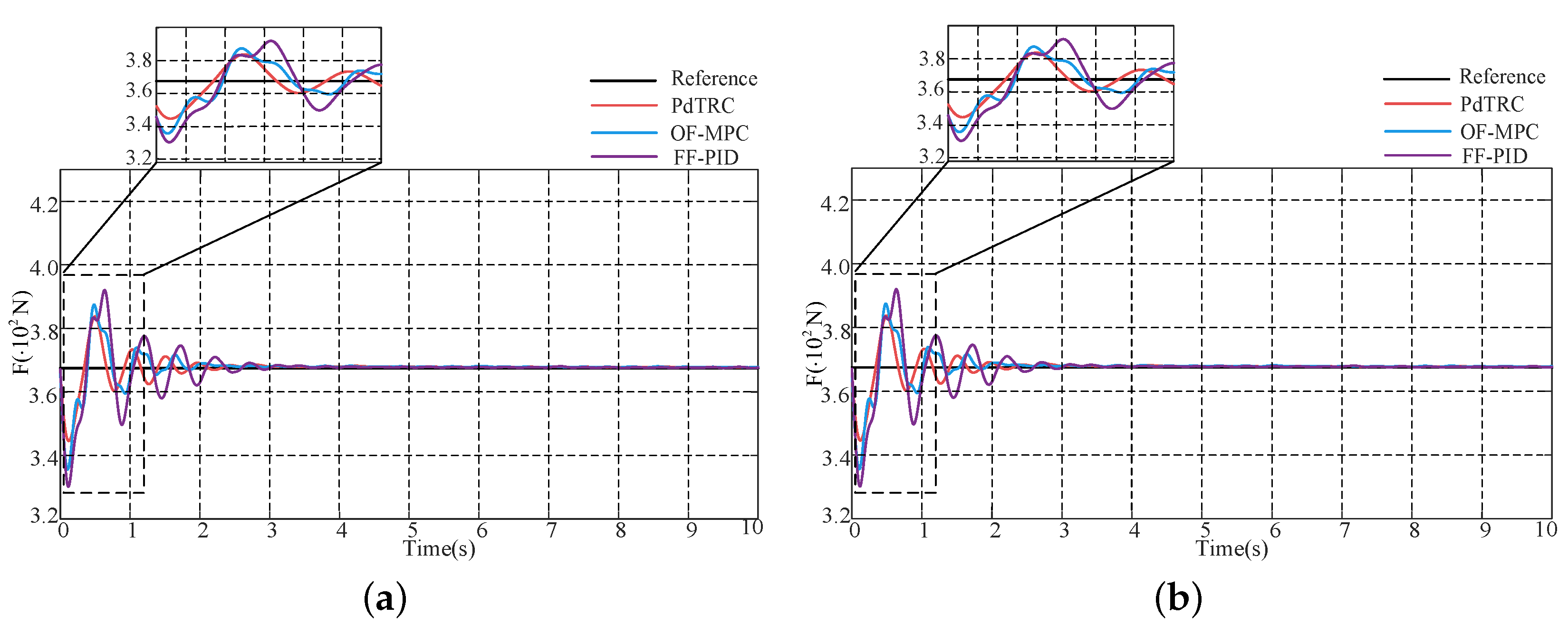
- The landing buffering scenario under low-gravity conditions
- B.
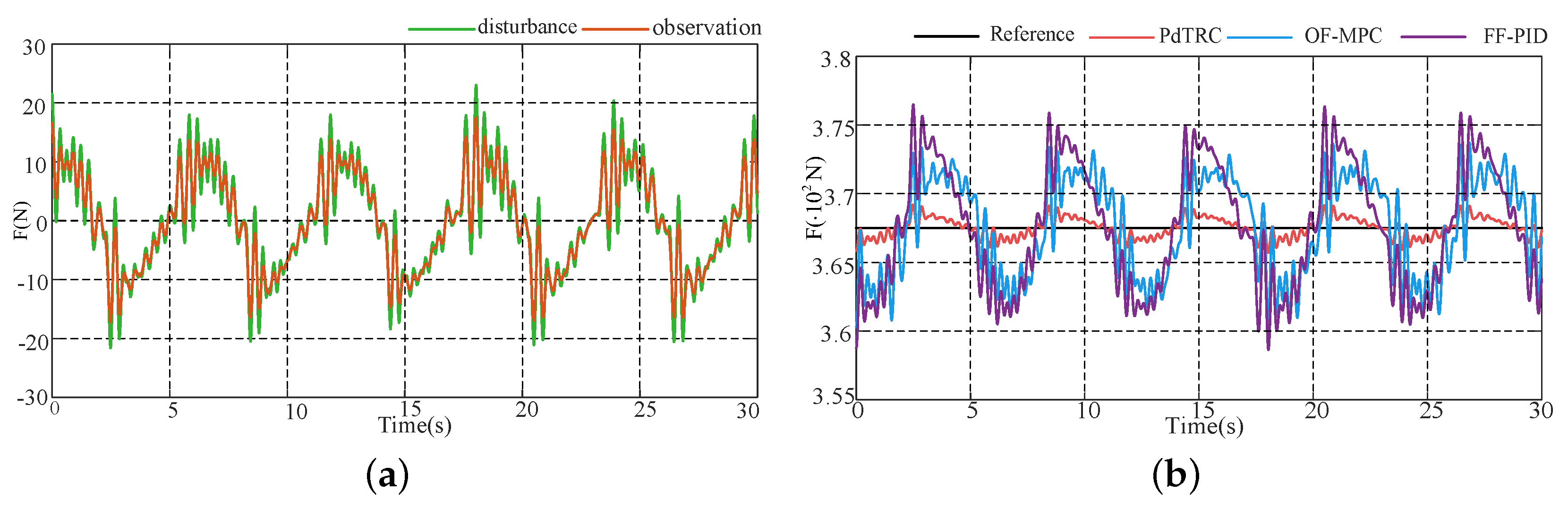
- Disturbance rejection scenario
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Gao, J.; Ma, Z.; Li, Y.; Zuo, S.; Liu, J. Design and verification of an active lower limb exoskeleton for micro-low gravity simulation training. In Proceedings of the International Conference on Intelligent Robotics and Applications, Harbin, China, 1–3 August 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 114–123. [Google Scholar]
- Hou, W.; Hao, Y.; Wang, C.; Chen, L.; Li, G.; Zhao, B.; Wang, H.; Wei, Q.; Xu, S.; Feng, K.; et al. Theoretical and experimental investigations on high-precision micro-low-gravity simulation technology for lunar mobile vehicle. Sensors 2023, 23, 3458. [Google Scholar] [CrossRef] [PubMed]
- Li, C.; Wang, H.; Hu, Z.; Wang, C.; Chen, J. Design and analysis of low-gravity simulation scheme for mars ascent vehicle. Aerospace 2024, 11, 424. [Google Scholar] [CrossRef]
- Jarvis, S.L.; Vu, L.Q.; Gupta, G.; Benson, E.; Kim, K.H.; Rhodes, R.; Rajulu, S.L. Development of ARGOS (Active Response Gravity Offload System) Offloading Assessments and Methodology for Lunar EVA Simulations. In Proceedings of the 52nd International Conference on Environmental Systems, Calgary, Canada, 12–16 July 2023. [Google Scholar]
- Xiong, D.; Huang, Y.; Yang, Y.; Liu, H.; Jiang, Z.; Han, W. Research on Horizontal Following Control of a Suspended Robot for Self-Momentum Targets. In Proceedings of the 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), Koh Samui, Thailand, 4–9 December 2023; pp. 1–6. [Google Scholar]
- Kim, Y.D.; Kim, S.Y.; Park, K.H. Development of the six degree-of-freedom active vibration isolation system by using a phase compensated velocity sensor. Trans. Korean Soc. Mech. Eng. A 2009, 33, 1347–1352. [Google Scholar] [CrossRef]
- Könemann, T.; Kaczmarczik, U.; Gierse, A.; Greif, A.; Lutz, T.; Mawn, S.; Siemer, J.; Eigenbrod, C.; von Kampen, P.; Lämmerzahl, C. Concept for a next-generation drop tower system. Adv. Space Res. 2015, 55, 1728–1733. [Google Scholar] [CrossRef]
- Sanavandi, H.; Guo, W. A magnetic levitation based low-gravity simulator with an unprecedented large functional volume. NPJ Microgravity 2021, 7, 40. [Google Scholar] [CrossRef]
- Wang, A.; Wang, S.; Xia, H.; Ma, G. Dynamic modeling and control for a double-state microgravity vibration isolation system. Microgravity Sci. Technol. 2023, 35, 9. [Google Scholar] [CrossRef]
- Tanimoto, R.; Moore, A.; MacDonald, D.; Thomas, S.; Murray, A.; Polanco, O.; Agnes, G. Model and test validation of gravity offload system. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007; p. 1790. [Google Scholar]
- Orr, S.; Casler, J.; Rhoades, J.; de León, P. Effects of walking, running, and skipping under simulated reduced gravity using the NASA Active Response Gravity Offload System (ARGOS). Acta Astronaut. 2022, 197, 115–125. [Google Scholar] [CrossRef]
- Wei, J.; Cao, D.; Wang, L.; Huang, H.; Huang, W. Dynamic modeling and simulation for flexible spacecraft with flexible jointed solar panels. Int. J. Mech. Sci. 2017, 130, 558–570. [Google Scholar] [CrossRef]
- Liu, Y. Robust adaptive observer for nonlinear systems with unmodeled dynamics. Automatica 2009, 45, 1891–1895. [Google Scholar] [CrossRef]
- Liu, P.; Yu, H.; Cang, S. Adaptive neural network tracking control for underactuated systems with matched and mismatched disturbances. Nonlinear Dyn. 2019, 98, 1447–1464. [Google Scholar] [CrossRef]
- Bianchi, D.; Di Gennaro, S.; Di Ferdinando, M.; Acosta Lùa, C. Robust control of uav with disturbances and uncertainty estimation. Machines 2023, 11, 352. [Google Scholar] [CrossRef]
- Zhou, F.; Peng, H.; Zeng, X.; Tian, X.; Peng, X. RBF-ARX model-based robust MPC for nonlinear systems with unknown and bounded disturbance. J. Frankl. Inst. 2017, 354, 8072–8093. [Google Scholar] [CrossRef]
- Wang, N.; Sun, Z.; Su, S.F.; Wang, Y. Fuzzy uncertainty observer-based path-following control of underactuated marine vehicles with unmodeled dynamics and disturbances. Int. J. Fuzzy Syst. 2018, 20, 2593–2604. [Google Scholar] [CrossRef]
- Moulay, E.; Léchappé, V.; Bernuau, E.; Defoort, M.; Plestan, F. Fixed-time sliding mode control with mismatched disturbances. Automatica 2022, 136, 110009. [Google Scholar] [CrossRef]
- Hu, Y.; Yan, H.; Zhang, H.; Wang, M.; Zeng, L. Robust adaptive fixed-time sliding-mode control for uncertain robotic systems with input saturation. IEEE Trans. Cybern. 2022, 53, 2636–2646. [Google Scholar] [CrossRef]
- Liu, H.; Zhang, T. Neural network-based robust finite-time control for robotic manipulators considering actuator dynamics. Robot. Comput. Integr. Manuf. 2013, 29, 301–308. [Google Scholar] [CrossRef]
- Tajrishi, M.A.Z.; Kalat, A.A. Fast finite time fractional-order robust-adaptive sliding mode control of nonlinear systems with unknown dynamics. J. Comput. Appl. Math. 2024, 438, 115554. [Google Scholar] [CrossRef]
- Wang, H.; Xu, K.; Zhang, H. Adaptive finite-time tracking control of nonlinear systems with dynamics uncertainties. IEEE Trans. Autom. Control. 2022, 68, 5737–5744. [Google Scholar] [CrossRef]
- Wang, F.; You, Z.; Liu, Z.; Chen, C.P. A fast finite-time neural network control of stochastic nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst. 2022, 34, 7443–7452. [Google Scholar] [CrossRef]
- Dorato, P. An overview of finite-time stability. In Current Trends in Nonlinear Systems and Control: In honor of Petar Kokotović and Turi Nicosia; Springer: Berlin/Heidelberg, Germany, 2006; pp. 185–194. [Google Scholar]
- Amato, F.; Ambrosino, R.; Ariola, M.; Cosentino, C.; De Tommasi, G. Finite-Time Stability and Control; Springer: London, UK, 2014; Volume 453. [Google Scholar]
- Yan, H.; Lu, H.; Wang, H.; Zhang, Z.; Huang, X. Neural-Network-Based Nonlinear Model Predictive Control of Suspension Gravity Offload System. In Proceedings of the 2024 3rd Conference on Fully Actuated System Theory and Applications (FASTA), Shenzhen, China, 10–12 May 2024; pp. 1346–1351. [Google Scholar] [CrossRef]
- Duan, H.; Yuan, Y.; Zeng, Z. Automatic carrier landing system with fixed time control. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 3586–3600. [Google Scholar] [CrossRef]
- Liu, K.; Wang, Y.; Li, Y.; Zhang, Y.; Wen, C.Y. Velocity-Free Adaptive Neural-Fuzzy Predefined-Time Attitude Control for Spacecraft. IEEE Trans. Aerosp. Electron. Syst. 2025, 1–17. [Google Scholar] [CrossRef]
- Li, Y.; Wang, T.; Liu, X.; Wen, C.y. Predefined-time Active Fault-tolerant Control of Transport Aircraft Subject to Control Surface Failures. IEEE Trans. Aerosp. Electron. Syst. 2024, 1–14. [Google Scholar] [CrossRef]
- Munoz-Vazquez, A.J.; Sánchez-Torres, J.D.; Jimenez-Rodriguez, E.; Loukianov, A.G. Predefined-time robust stabilization of robotic manipulators. IEEE/ASME Trans. Mechatronics 2019, 24, 1033–1040. [Google Scholar] [CrossRef]
- Ai, Z.; Wang, H. Adaptive predefined-time tracking control of nonlinear systems with unmodeled dynamics. Int. J. Control. 2025, 1–10. [Google Scholar] [CrossRef]
- Wang, Q.; Cao, J.; Liu, H. Adaptive fuzzy control of nonlinear systems with predefined time and accuracy. IEEE Trans. Fuzzy Syst. 2022, 30, 5152–5165. [Google Scholar] [CrossRef]
- Muñoz-Vázquez, A.J.; Fernández-Anaya, G.; Sánchez-Torres, J.D.; Meléndez-Vázquez, F. Predefined-time control of distributed-order systems. Nonlinear Dyn. 2021, 103, 2689–2700. [Google Scholar] [CrossRef]
- Sun, G.; Liu, Q.; Pan, F.; Zheng, J. Disturbance observer based adaptive predefined-time sliding mode control for robot manipulators with uncertainties and disturbances. Int. J. Robust Nonlinear Control. 2024, 34, 12349–12374. [Google Scholar] [CrossRef]
- Liu, Y.; Huo, Y. Predefined-time sliding mode control of chaotic systems based on disturbance observer. Math. Biosci. Eng. 2024, 21, 5032–5046. [Google Scholar] [CrossRef]
- Ji, J.; Jiang, P. Research on Predefined Time Sliding Mode Control Method for High-Speed Maglev Train Based on Finite Time Disturbance Observer. Actuators 2025, 14, 21. [Google Scholar] [CrossRef]
- Zhao, Z.L.; Guo, B.Z. A novel extended state observer for output tracking of MIMO systems with mismatched uncertainty. IEEE Trans. Autom. Control. 2017, 63, 211–218. [Google Scholar] [CrossRef]
- Besnard, L.; Shtessel, Y.B.; Landrum, B. Control of a quadrotor vehicle using sliding mode disturbance observer. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 5230–5235. [Google Scholar]
- Kögel, M.; Findeisen, R. Robust output feedback MPC for uncertain linear systems with reduced conservatism. IFAC-PapersOnLine 2017, 50, 10685–10690. [Google Scholar] [CrossRef]
- Zhang, D.; Zhao, X.; Han, J. Active model-based control for pneumatic artificial muscle. IEEE Trans. Ind. Electron. 2016, 64, 1686–1695. [Google Scholar] [CrossRef]
- Sánchez-Torres, J.D.; Gómez-Gutiérrez, D.; López, E.; Loukianov, A.G. A class of predefined-time stable dynamical systems. IMA J. Math. Control. Inf. 2018, 35, i1–i29. [Google Scholar] [CrossRef]
- Wang, Y.; Gao, J.; Wu, X.; Feng, X. Predefined-time tracking control for a class of strict-feedback nonlinear systems with time-varying actuator failures and input delay. Nonlinear Dyn. 2025, 113, 11577–11591. [Google Scholar] [CrossRef]
- Ni, J.; Shi, P. Global predefined time and accuracy adaptive neural network control for uncertain strict-feedback systems with output constraint and dead zone. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 7903–7918. [Google Scholar] [CrossRef]
- Wu, C.; Yan, J.; Shen, J.; Wu, X.; Xiao, B. Predefined-time attitude stabilization of receiver aircraft in aerial refueling. IEEE Trans. Circuits Syst. II Express Briefs 2021, 68, 3321–3325. [Google Scholar] [CrossRef]
- Jiménez-Rodríguez, E.; Muñoz-Vázquez, A.J.; Sánchez-Torres, J.D.; Defoort, M.; Loukianov, A.G. A Lyapunov-like characterization of predefined-time stability. IEEE Trans. Autom. Control. 2020, 65, 4922–4927. [Google Scholar] [CrossRef]
- Bingul, Z.; Gul, K. Intelligent-PID with PD feedforward trajectory tracking control of an autonomous underwater vehicle. Machines 2023, 11, 300. [Google Scholar] [CrossRef]
- Zarebidoki, M.; Dhupia, J.S.; Xu, W. A review of cable-driven parallel robots: Typical configurations, analysis techniques, and control methods. IEEE Robot. Autom. Mag. 2022, 29, 89–106. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, H.; Lu, H.; Yang, Y.; Li, B. Predefined-Time Robust Control for a Suspension-Based Gravity Offloading System. Aerospace 2025, 12, 495. https://doi.org/10.3390/aerospace12060495
Yan H, Lu H, Yang Y, Li B. Predefined-Time Robust Control for a Suspension-Based Gravity Offloading System. Aerospace. 2025; 12(6):495. https://doi.org/10.3390/aerospace12060495
Chicago/Turabian StyleYan, Huixing, Hongqian Lu, Yefeng Yang, and Boyang Li. 2025. "Predefined-Time Robust Control for a Suspension-Based Gravity Offloading System" Aerospace 12, no. 6: 495. https://doi.org/10.3390/aerospace12060495
APA StyleYan, H., Lu, H., Yang, Y., & Li, B. (2025). Predefined-Time Robust Control for a Suspension-Based Gravity Offloading System. Aerospace, 12(6), 495. https://doi.org/10.3390/aerospace12060495