3.2.1. Steady-State Operation
Before pulse-mode hot fire tests, steady-state hot fire tests were used to evaluate thruster performance against design targets to detect design or fabrication flaws.
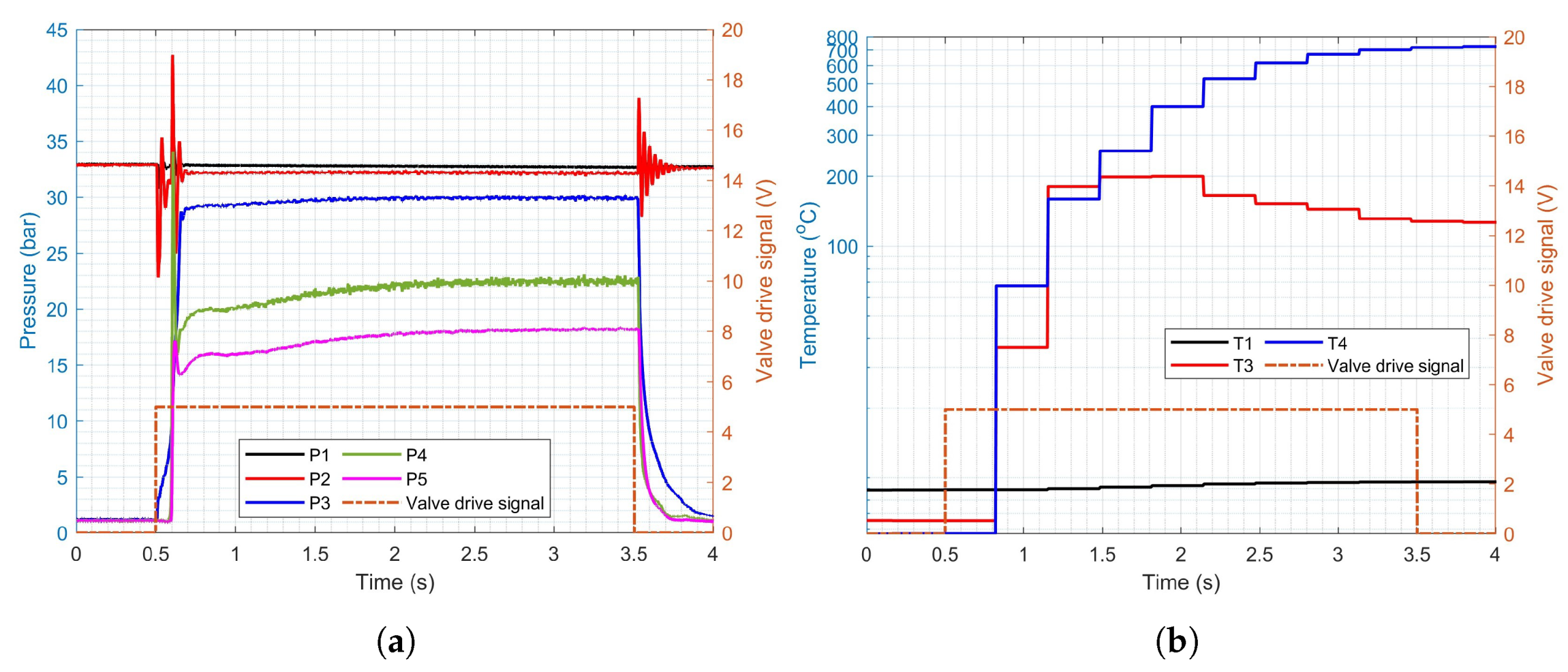
Table 8 summarizes the predicted and measured steady-state test outcomes, while
Figure 10 displays pressure and temperature data. The chamber pressure reached 18 bar, which is 2 bar less than the design value, due to a mismatch between the designed (4.86 mm) and fabricated (5.3 mm) nozzle throat diameters caused by fabrication error. This increased throat area reduced chamber pressure buildup, degrading performance. Also, a thermocouple failure hindered accurate temperature measurement at the catalytic reactor’s midpoint (T2) and so this measurement was not used in the analysis.
Figure 10 shows temperature trends at the reactor inlet, outlet, and chamber. The chamber temperature of 734.6 °C closely aligned with the adiabatic decomposition temperature of 90 wt.% HTP (746.17 °C). The thermal and
efficiencies (
and
) calculated following Equation (
6) suggest an effective catalyst bed design with minimal heat loss through the thruster walls.
The mean surge pressure in steady-state hot fire tests was 39.33 bar, with a mean pressure upstream of the valve of 32 bar. The lower surge pressure relative to water likely stems from HTP’s smaller bulk modulus, preventing cavitation and the onset of the secondary water hammer.
Feed line characteristics were investigated using the pressure perturbation measurements obtained from steady-state hot fire tests. The “ping test”, per Martin et al. [
8], uses the pressure response after valve closure to determine the natural frequency of the propellant feeding system. To determine the natural frequency, pressure data obtained at the tank downstream (P1) and upstream of the solenoid valve (P2) were converted from the time to the frequency domain, as shown in a power spectral density (PSD) plot (
Figure 11). The ping test indicated that the feed line’s natural frequency with the valve closed (
) was 36.11 Hz, regardless of the measuring position. Similarly, the feed line’s natural frequency with the valve opened (
) was obtained as 24.51 Hz through FFT analysis using the pressure oscillation measurement acquired upstream of the valve at the moment of valve opening.
3.2.2. PWM Throttling Operation
The hot fire test sequence for pulse operation, depicted in
Figure 12, proceeded as follows. Since the decomposition capability of the catalyst is highly dependent on its temperature, it was essential to keep the catalyst’s temperature identical for all cases before the pulse mode firing begins in order to make an appropriate comparison Hence, the thruster operated steadily for 3 s to elevate the catalyst bed temperature, ensuring complete propellant decomposition. A 1-second pause then mitigated steady-state effects and water hammer perturbations from influencing the propulsion system operating PWM throttling. Subsequently, command signals for preset pulse conditions actuated the solenoid valve for 6 s, enabling thruster pulse operation. In the hot fire test, PWM throttling operated at
Hz. A trade-off exists: higher frequencies favor precise and responsive maneuvers that are crucial for lander applications but require a high-performance solenoid valve with limited mass flow rate and DC range. Thus, 10 Hz is a suitable compromise for lander applications, validated by prior references including MPL, Phoenix, Mighty Eagle, and DALBIT-1 [
3,
5,
6,
8].
Figure 13 shows pressure, thrust, and valve drive signal data from a 50-newton-class HTP monopropellant thruster operated in pulse mode at
= 10 Hz with DC = 10–90%. Pressure spikes and subsequent oscillations in the propellant feed system occur shortly after the “off” signal, while sharp pressure drops follow the “on” signal. These drops stem from rarefaction waves traveling through the feed line upon valve opening. Oscillations decay faster for rarefaction waves than for compression waves, as liquid flow dissipates and suppresses wave propagation. Similar to cold flow test results, the valve did not close at
= 10 Hz with DC = 80 and 90% and at
= 5 Hz with DC = 90%. Upstream pressure measurements showed no compression or rarefaction waves, indicating no valve actuation and thus no PWM throttling.
Figure 13 displays fluctuating thrust readings during valve closure, likely due to structural vibration in the propellant feed system affecting the measurement device. This suggests that past pulse operations influence future fluid dynamics not only via wave propagation through the feed line but also through residual structural vibration.
Figure 14 illustrates the opening response delay (ORD) and closing response delay (CRD) from PWM throttling at
Hz across various duty cycles (DCs). Both ORD (11 ms) and CRD (27.5 ms) increased relative to the cold flow test, likely due to elevated upstream pressure. Data for DC = 80% are disregarded, as the prolonged CRD causes the valve to remain open throughout the pulse operation. Notably, the CRD at DC = 10% is shorter than the other pulse condition, which will be further described below.
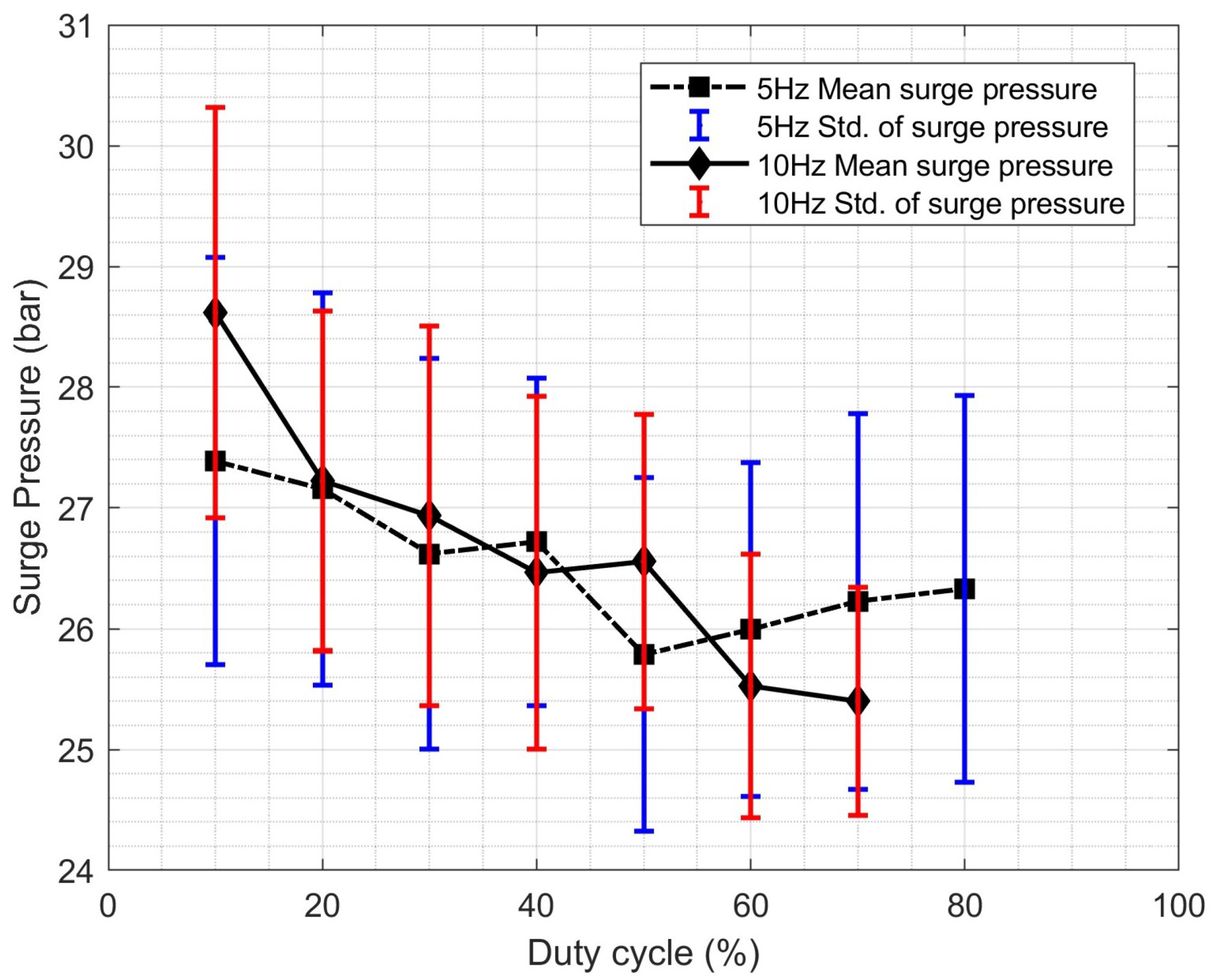
Water hammer pressures from pulse-width modulation (PWM) throttling at both frequencies were compared to steady-state measurements.
Figure 15 shows the mean and standard deviation of surge pressures across duty cycles. In pulse operation, the surge pressures generally align with the steady-state value of 39.33 bar. However, at
= 10 Hz with DC = 10% and 40%, the surge pressures exceed this average, peaking at 50.55 bar for the 10 Hz, 10% duty cycle condition. At
= 5 Hz, surge pressure variations were minimal. Unlike cold flow tests, prolonged valve closure does not account for the amplification observed in the
= 10 Hz with DC = 10% condition, as surge pressures remained stable at
= 5 Hz, DC = 10% despite the injector manifold pressure being lower than that of the
= 10 Hz, DC = 10% duty cycle.
The amplified surge pressure at
Hz, DC = 10% likely explains the shorter CRD compared to other conditions. In the solenoid valve, an elastomer seal on the armature blocks the flow path when springs return it to its base upon power cessation. Elevated upstream pressure assists this motion. When surge pressure significantly exceeds that in other conditions, the increased force on the armature reduces closure time, thereby reducing CRD, as shown in
Figure 14.
Prior research offers insight into this phenomenon. Martin et al. [
8] noted that waves from prior water hammer events affect subsequent pressure fluctuations. The solenoid valve’s electromagnetic force induces fluid oscillations, generating compression or rarefaction waves in the feed line based on actuation mode. When the valve opens, a rarefaction wave is generated at
Hz. Conversely, a compression wave arises upon valve closure at
Hz. Thus, repetitive actuation fills the feed line with pressure waves at frequencies of either
or
, propagating between the propellant tank and valve with varying phases. Superposition between these waves, under specific pulse conditions, can lead to amplified surge pressure or pressure drops, as shown in
Figure 15. Two scenarios emerge: (1) valve closure induces a pressure surge via water hammer and the peak of the surge aligns with the crest of the pressure oscillation created from prior valve opening or (2) valve opening induces a perturbation and the phase of undermost pressure drop aligns with the trough created from the prior valve closure.
The first scenario is described by Equation (
7), which identifies pulse conditions that satisfy the criterion for constructive interference of pressure waves from consecutive valve actuations. Notably, CRD decreases with escalating surge pressure. The extended propagation of a wave before it superposes with the next actuation gradually dampens its intensity, thereby reducing the interference effect of the pulse conditions with higher
n values.
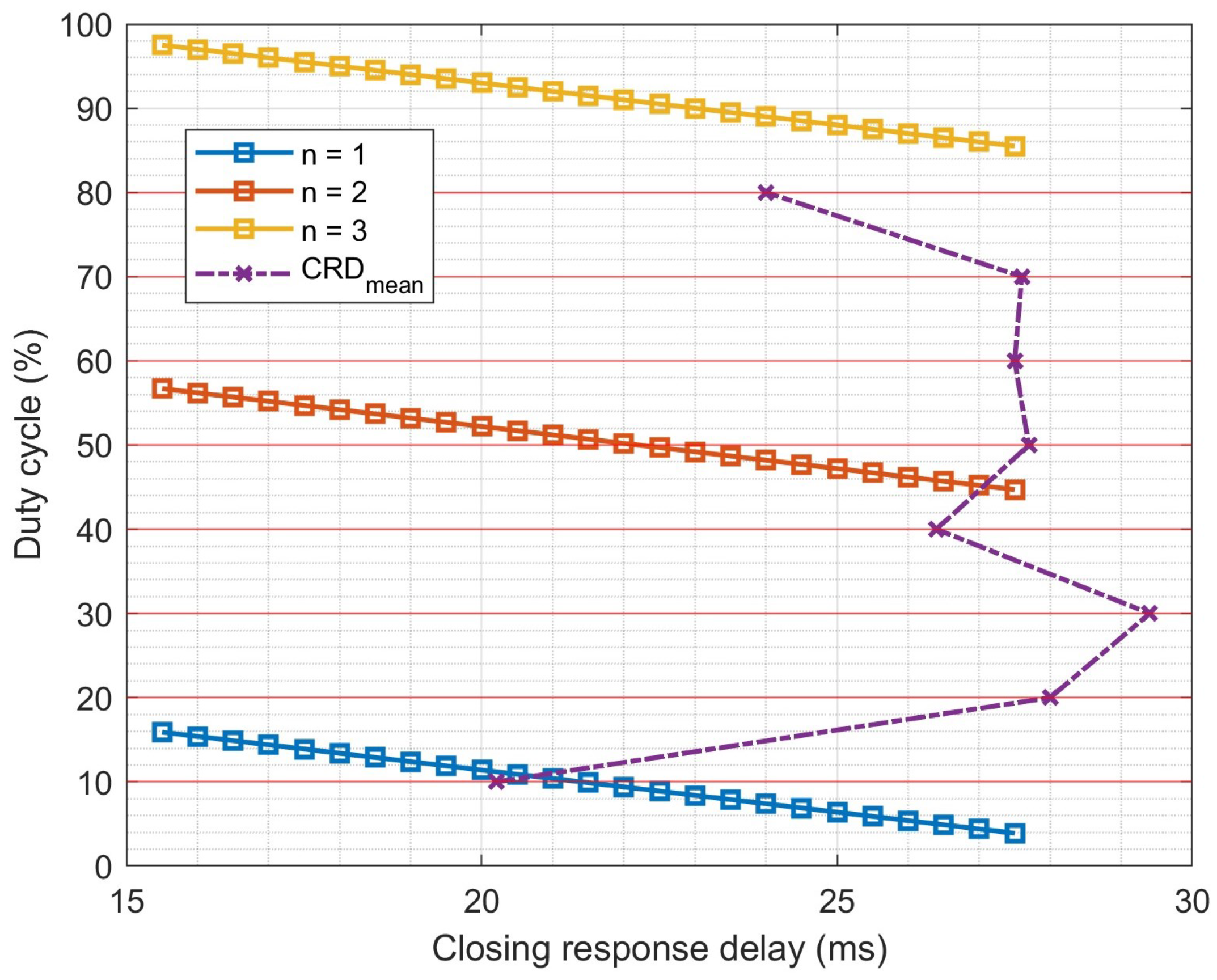
Figure 16 depicts pulse conditions that satisfy this criterion with varying CRD. For
n = 1 to 3, DC = 10% and 45% can provoke amplification, contingent on matching CRD to surge pressure. DC = 10% closely aligns with the criterion, explaining the amplified surge pressure in
Figure 15, while DC = 40% borders an unstable point, offset by 5%, resulting in the moderate surge pressure increase The unstable point at
(DC = 80%) cannot be achieved, as it causes the valve to remain open during PWM throttling.
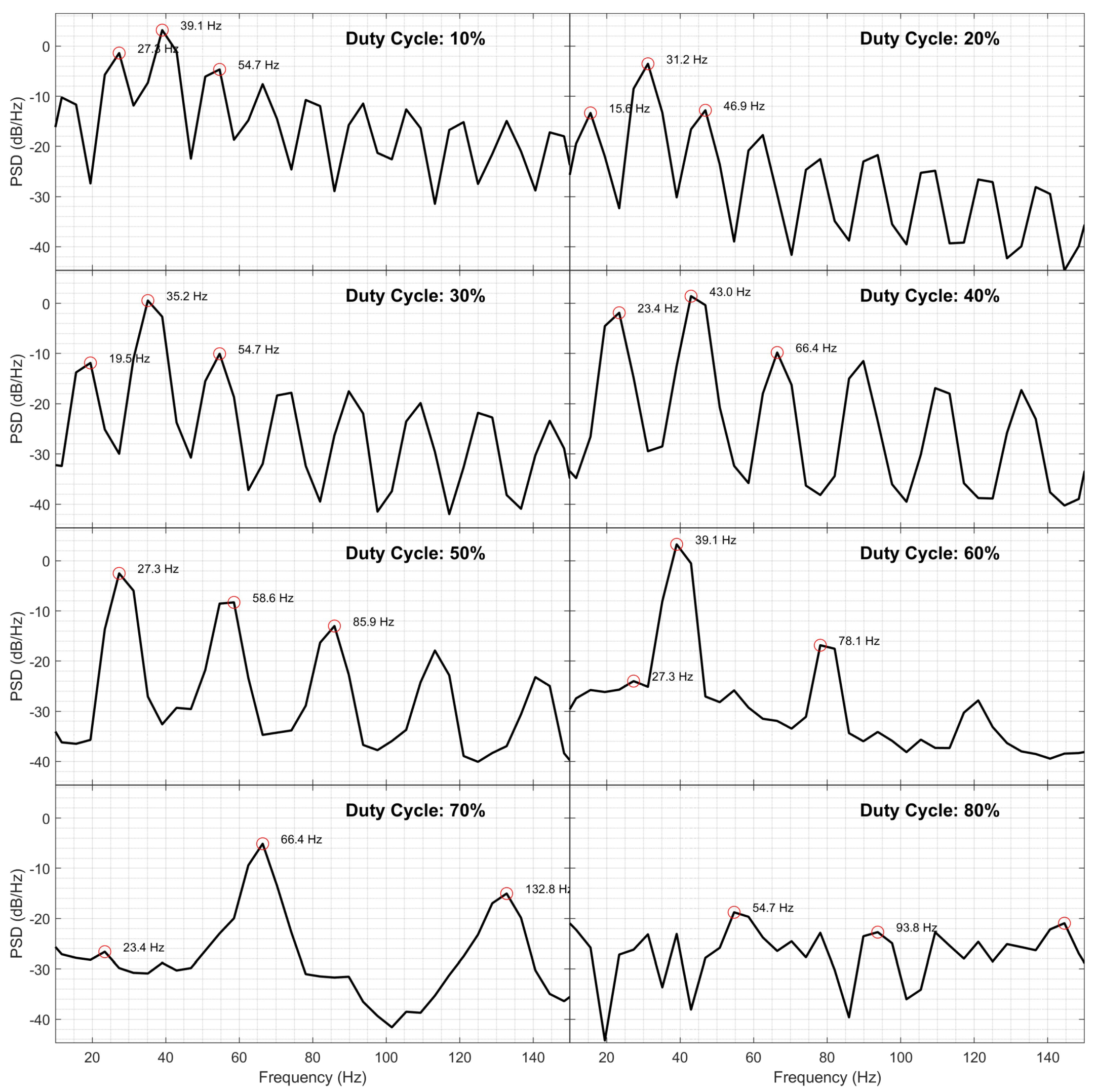
Figure 17 shows the power spectral density (PSD) estimate, derived via Welch’s method from pressure data at the solenoid valve upstream during valve opening. Due to abrupt flow changes from valve actuation, PSD analysis includes only measurements during valve opening. The figure reveals peaks at harmonics of the fundamental frequency, indicating that cyclic valve actuation serves as a source of forced oscillation. High surge pressure conditions (DC = 10% and 40%) exhibit a dominant peak, and its first overtone is near the natural frequency for the closed-valve configuration (
Hz). This demonstrates that existing perturbations constructively interfere with newly generated oscillations from a water hammer, intensifying the oscillation.
The second scenario is described by Equation (
8), which identifies the pulse conditions where the opening of the valve constructively interferes with the existing perturbation created by the previous valve closure, so the pressure drop by the rarefaction wave can be amplified. Similar to the CRD shortening with the increase in mean and surge pressure, the drop in valve upstream pressure could also shorten the ORD by reducing the force acting on the armature that pushes it against the base.
Figure 18 depicts the pulse conditions satisfying the criterion for varying CRD, which depends upon upstream valve pressure. For
to 3, DC = 70%, 40%, and 16% can induce amplification if CRD aligns with surge pressure. DC = 70% matches the constructive interference condition, while DC = 40% nears the sufficient condition but undergoes greater damping in the first overtone due to extended propagation before interference. Unlike the first scenario, here, constructive interference significantly lowers pressure when the valve opens, flushing liquid out of the feed line. Given the valve closure duration and wave propagation dampening the perturbation, the pressure oscillation contributing to the surge pressure increase is negated by valve closure.
Figure 19 shows the PSD estimate from pressure measurements upstream of the valve while it is closed. Many peaks correspond to those in
Figure 17, indicating that pressure perturbations persist through valve actuation. Notably, the PSD in the second scenario is less significant than the first, obscuring differences between conditions with and without constructive interference. This trend arises from liquid flow: when the valve opens, rarefaction waves propagating counter to the flow direction undergo significant energy loss, reducing perturbation amplitude despite constructive interference.
Reduced pressure during liquid injection significantly affects propulsion system stability. Chugging instability arises from dynamic interactions between the propellant feed and catalytic reactor; its suppression requires decoupling these dynamics with a sufficient pressure drop across feed components. If pressure during propellant injection decreases markedly, the reduced pressure drop heightens the likelihood of chugging instability onset. The pulse conditions for maximum rarefaction wave superposition are at a DC of 70%, with a valve closure duration (
) of 13.5 ms. This brief period limits gas ejection without propellant injection, sustaining high reactor pressure and further reducing the pressure drop, as shown in
Figure 13. Conversely, smaller DCs involve discrete thrust generation without steady-state operation, rendering chugging instability less significant.
The ideal impulse per pulse under any operating condition is given by Equation (
9). However, considering valve response delays, transient fluctuations in propellant injection, chugging instability, and residual pressure after valve closure, the actual impulse per pulse was calculated using Equation (10) and is presented in
Figure 20. Negative thrust readings—primarily caused by structural vibrations in the thruster and feed system—were below the load cell’s offset and thus excluded from the impulse calculation.
The results show that, under 10 Hz operation, the impulse per pulse generally increases linearly with duty cycle (DC), except at 10% and 70%, where deviations were observed. At DC = 10%, the measured thrust was significantly reduced, likely due to amplified surge-induced structural vibrations that interfered with accurate force measurement. At DC = 70%, chugging instability—caused by insufficient pressure drop across feed components—led to periodic fluctuations in propellant injection, thereby reducing net thrust.
During steady-state operation, the measured average thrust was approximately 47.08 N, resulting in an impulse per pulse of about 4.7 N·s. The 10 Hz PWM modulation corresponds to a throttling ratio of approximately 1:3. The achievable throttling range is constrained by the valve’s actuation capability. If the valve could be actuated more rapidly (i.e., with shorter VRDs), the throttling range could be further expanded. Conversely, operating at lower frequencies enables additional reduction in impulse per pulse with minimal technical limitations. However, as the PWM frequency directly influences spacecraft controllability, a trade-off must be made between thrust resolution and control responsiveness.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}