3.1. Analysis of FTLG Drop-Shock Dynamics
In order to keep the structural elements of the airplane from overloading during landing, the landing gear must be able to effectively absorb the energy generated by the impact. The drop-shock dynamics analysis is intended to verify that the landing gear cushioning system meets the design work absorbed, while also verifying that the overload and strut compression stroke of the landing gear meet the design requirements and that the structural strength meets the expectations. Therefore, before analyzing the landing dynamics of the whole aircraft, drop-shock dynamics analysis is usually performed on a single MLG.
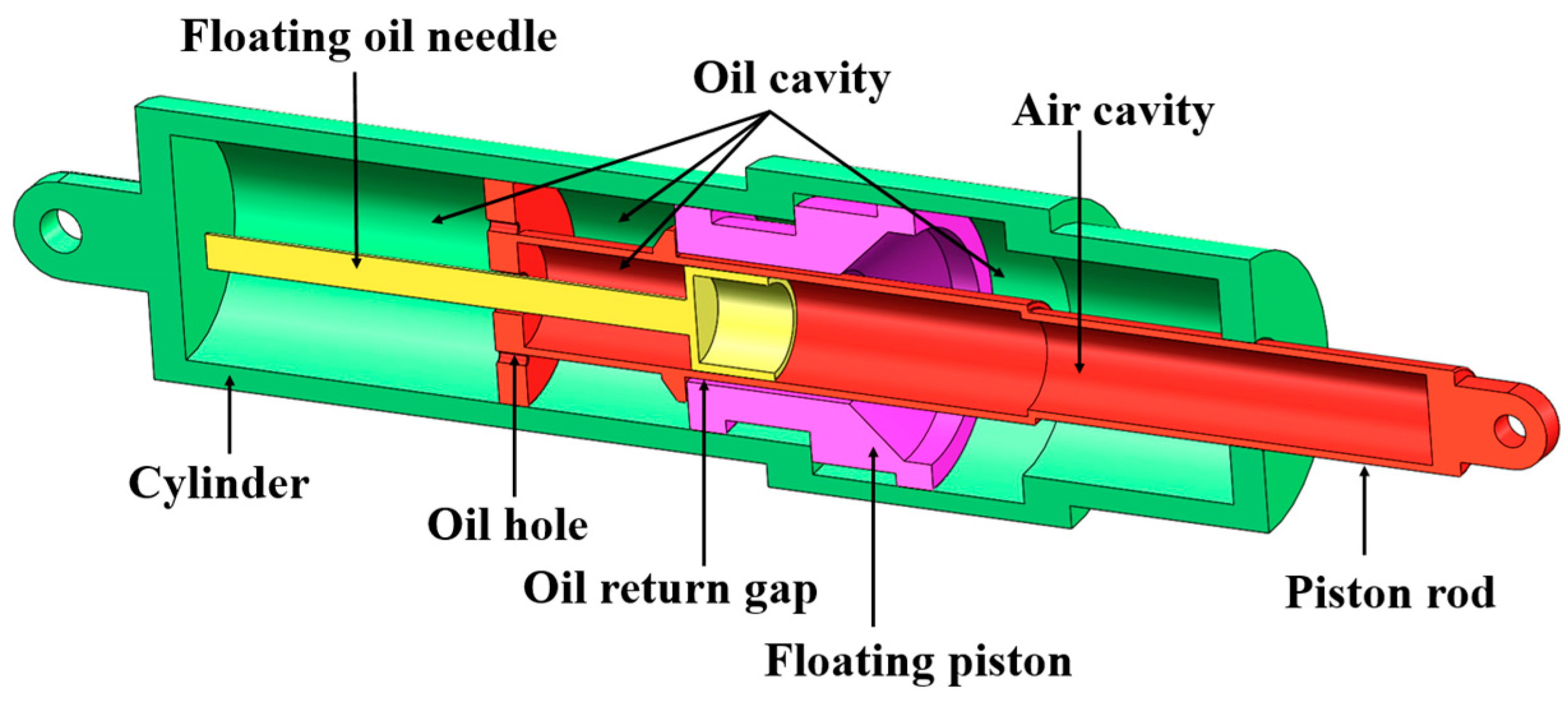
In this drop-shock simulation analysis, a single-chamber oil–gas buffer was selected for the main buffer. To optimize the cushioning effect of the designed buffer, the buffer filling parameters needed to be designed [
15]. After repeated iterative calculations, a set of main buffer filling parameters was obtained, as shown in
Table 2.
In this paper, the landing gear drop-shock dynamics were analyzed using the imitation lift method. At the moment when the landing gear wheels touched the ground, the lift imitation force began to act to provide a constant lift simulation, and the lift imitation force was canceled when the MLG reached the maximum compression stroke. The FTLG drop-shock simulation parameters are shown in
Table 3:
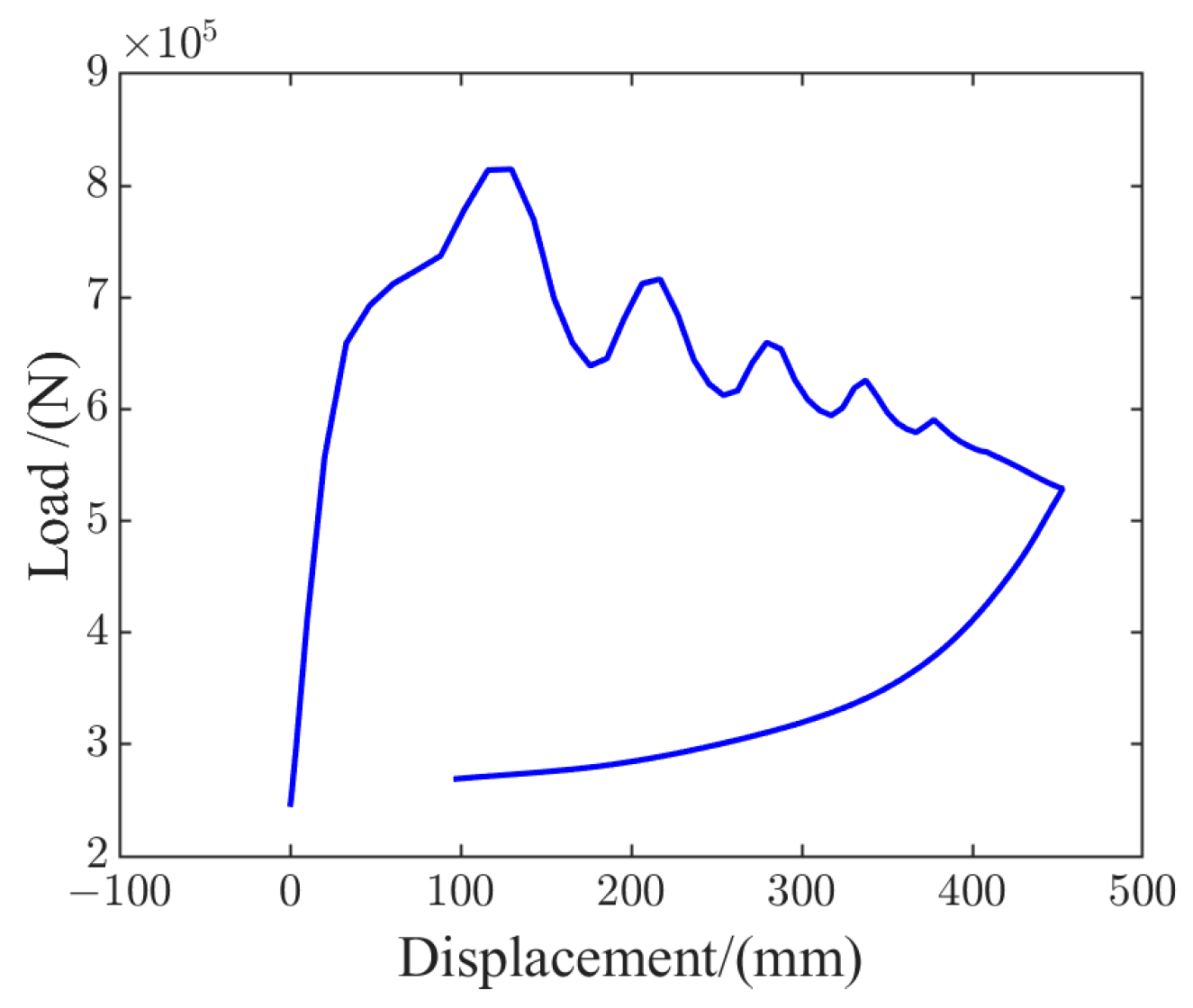
After solving the kinetic calculation, as shown in
Figure 5, the main buffer power diagram (main buffer axial load variation with compression stroke) was obtained. It can be seen from the figure that the power diagram was saturated, and the buffer efficiency reached 82.74%, meeting the technical requirement. The maximum compression stroke was 486 mm, not exceeding the permissible stroke.
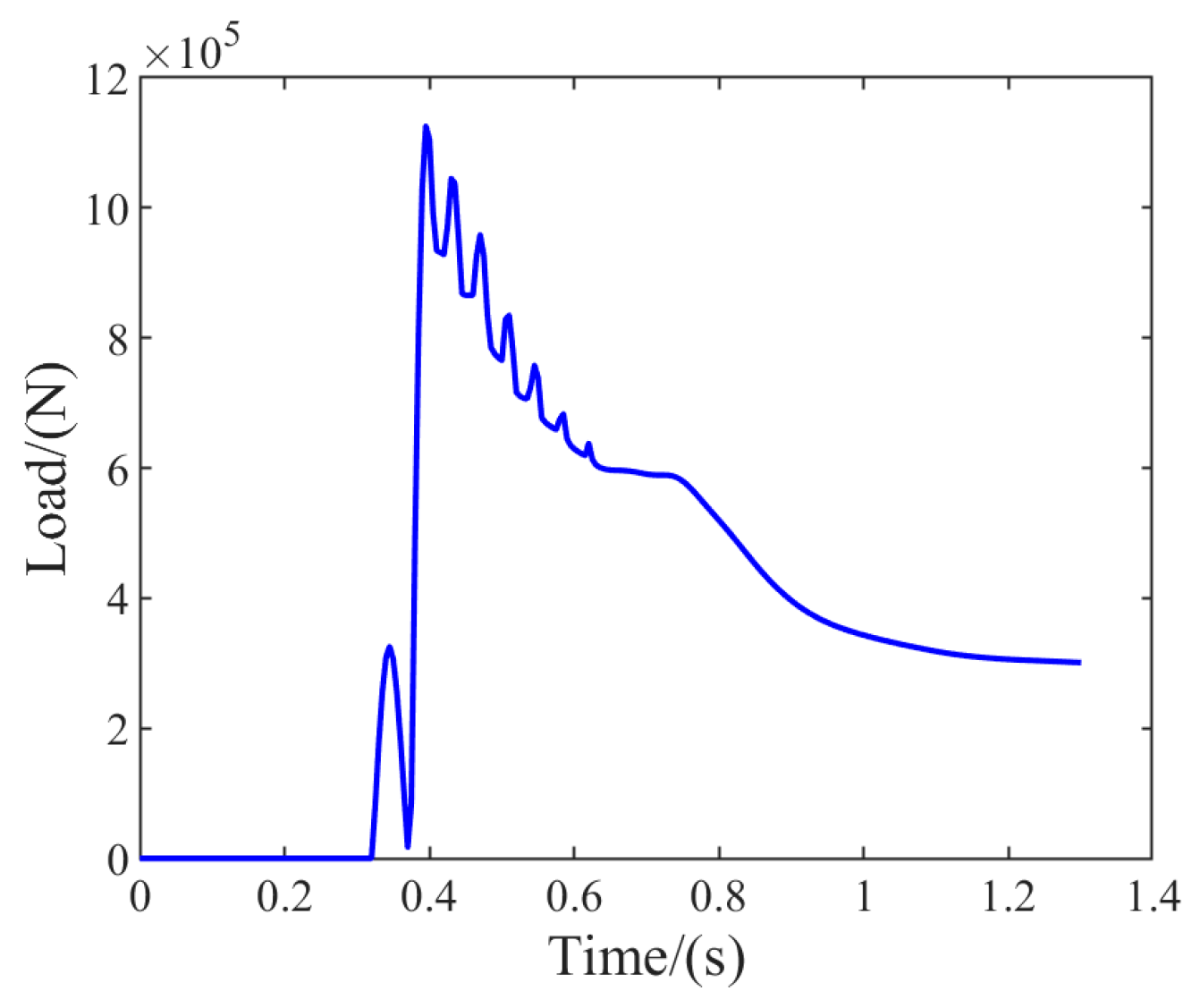
Figure 6 demonstrates the relationship of the vertical load with time during the FTLG drop-shock process. The vertical load reached a maximum value of 967,077 N at 0.4 s. At this time, the maximum vertical overload of FTLG was 1.21, which indicates that the landing shock load was also within the permissible range.
In conclusion, after adopting the above filling parameters, the buffer efficiency, compression stroke, and vertical overload all met the requirements. This indicates that the main buffer has excellent performance and can support the subsequent research and analysis.
3.2. Analysis of Whole-Aircraft Landing Dynamics
The drop-shock dynamics analysis only considers the motion process of a single FTLG, but when the airplane lands, the fuselage can generate pitch and roll motions accordingly. Therefore, it is necessary to establish a whole-aircraft landing dynamics model in order to simulate the real landing situation and to consider the influence of the fuselage posture on the landing loads.
It is assumed that the airplane is in a symmetric landing attitude, which means that the longitudinal plane of symmetry of the airplane is perfectly symmetric and the two MLGs contact the ground at the same time [
16].
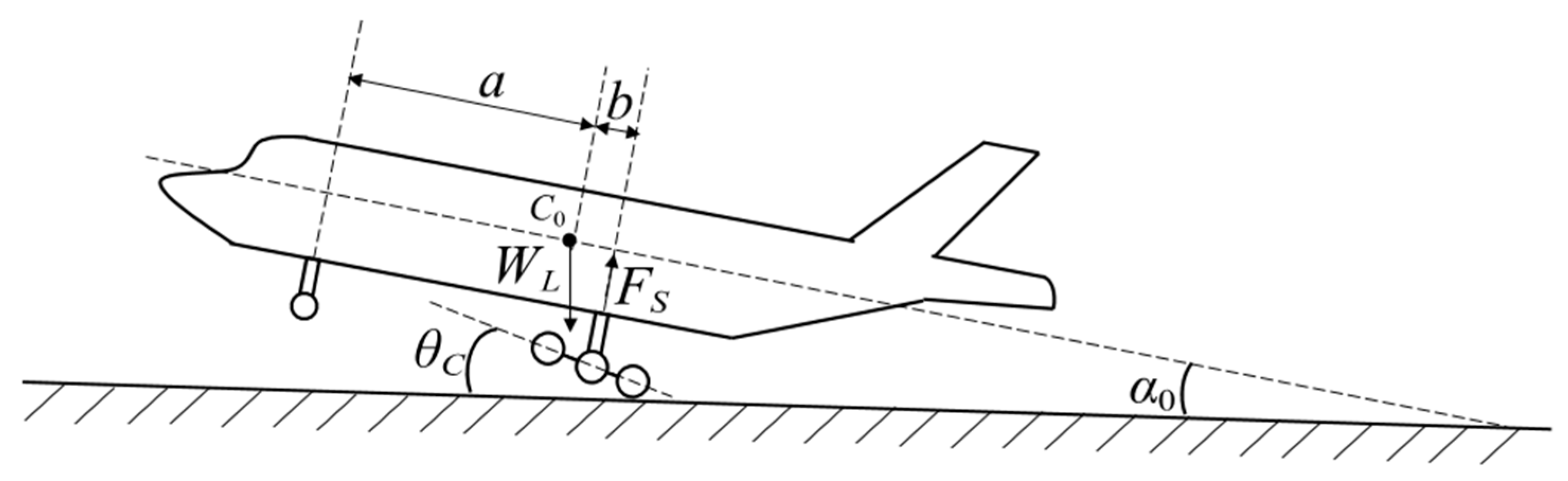
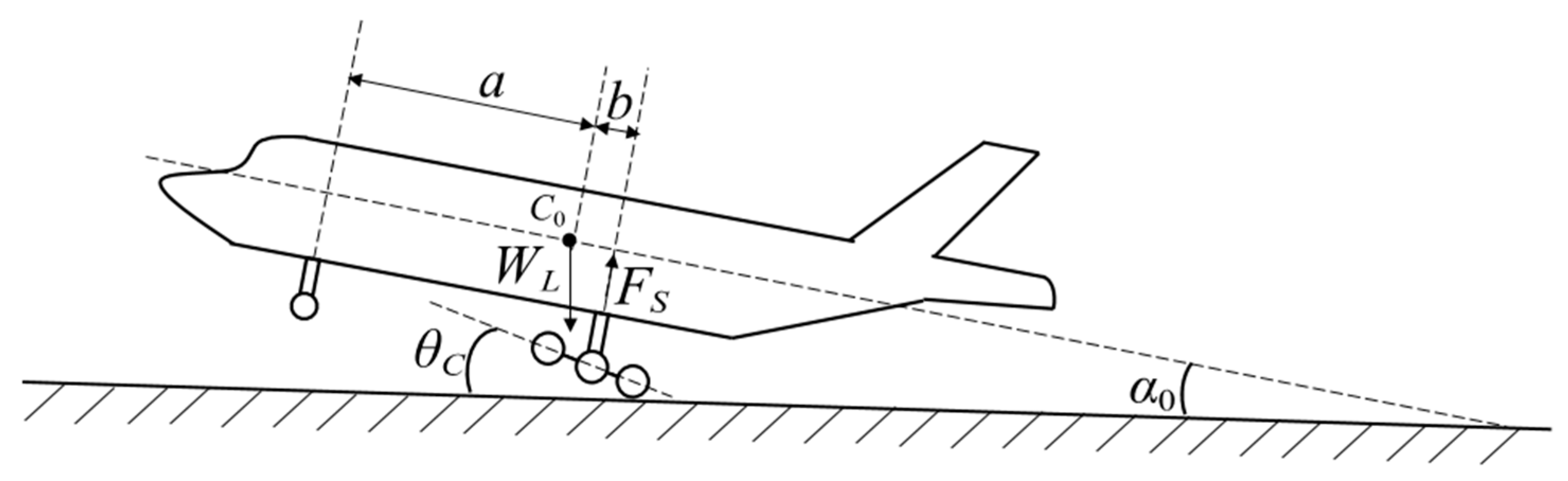
Figure 7 illustrates a side view of the symmetrical landing of the aircraft,
is the center of gravity of the fuselage,
is the axial reaction force of the main strut,
a is the distance from the nose landing gear (NLG) mounting point along the longitudinal axis of the fuselage to the center of gravity,
b is the distance from the MLG mounting point to the center of gravity,
is the design mass of the aircraft for landing,
is the tail sink angle (the angle between the longitudinal axis of the fuselage and the runway’s horizontal surface), and
is the frame lift angle (the angle between the frame axle line and the runway’s horizontal surface).
When an airplane lands symmetrically, the fuselage motion needs to consider its own rotational freedom around the lateral axis as well as its translational freedom along the vertical direction. When the MLG touches down, the axial reaction force of the main strut gradually increases, the vertical velocity of the airplane decreases, and meanwhile, the fuselage generates a rotational motion around the transverse axis [
17]. Therefore, the dynamical equations of the fuselage landing process are:
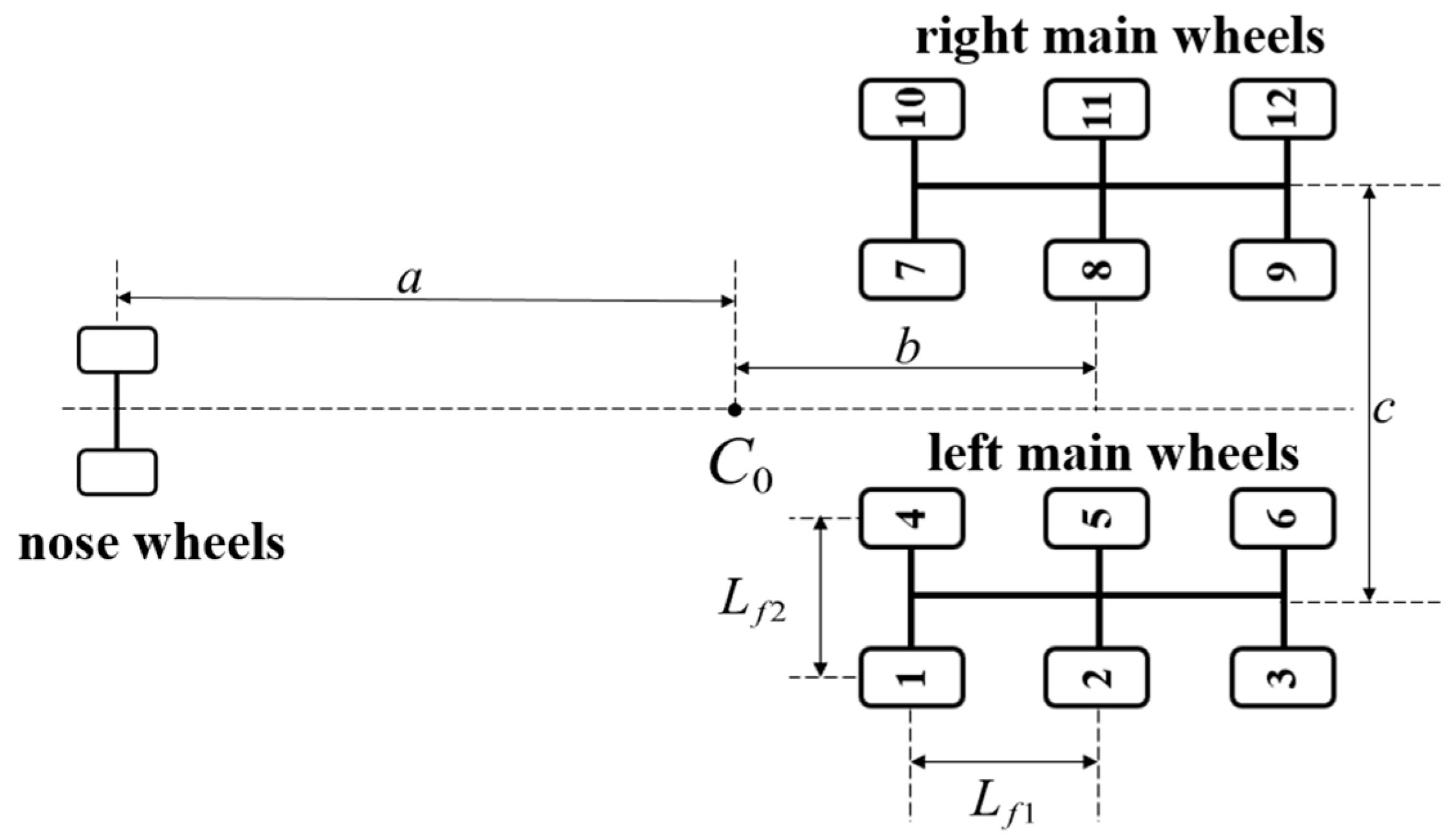
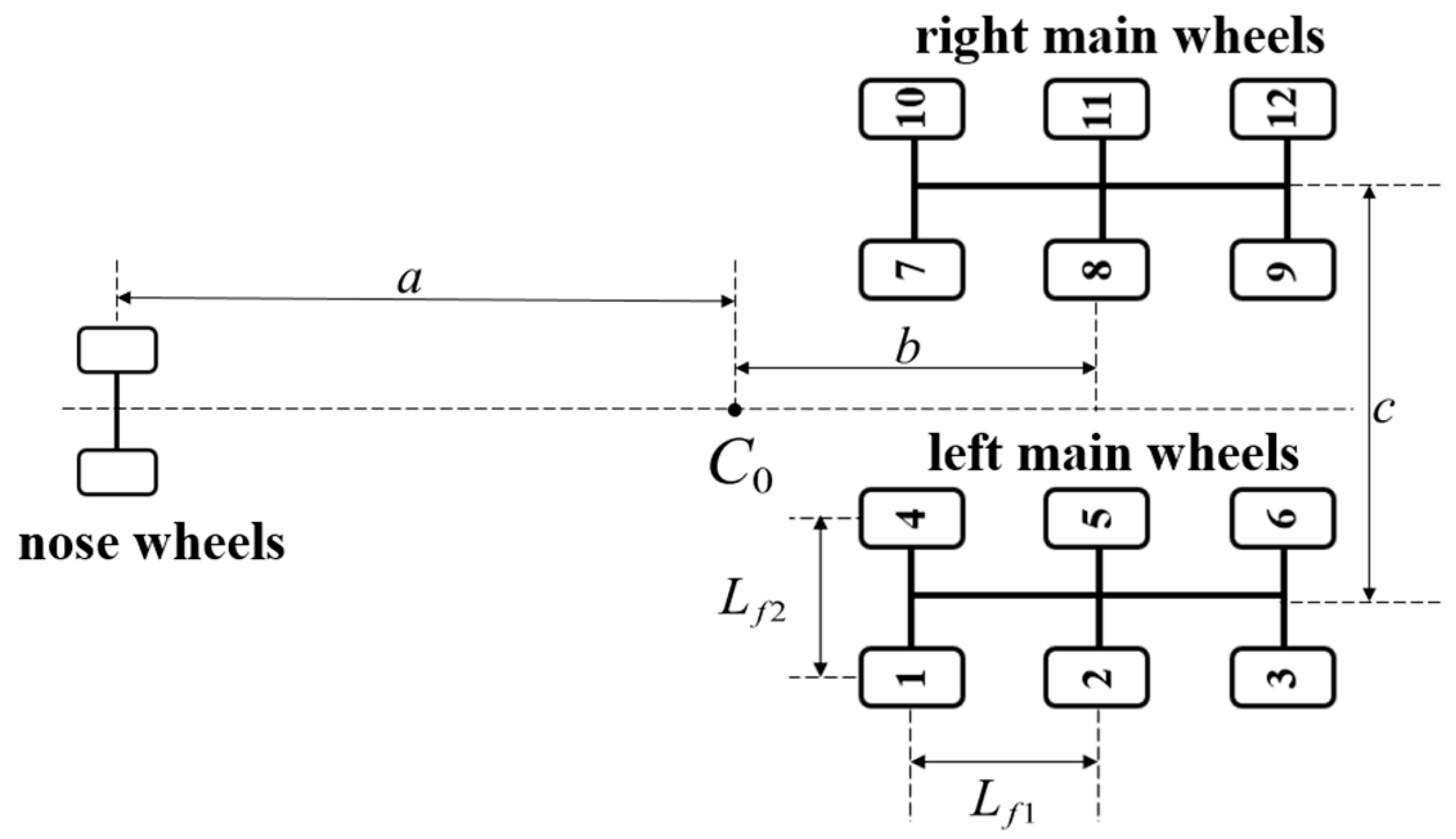
As shown in
Figure 8, the wheels are labeled, and the main wheel arrangement dimensions are also labeled.
The overall parameters of the aircraft and the main landing gear mounting dimensions parameters required for this whole-aircraft landing dynamics analysis are shown in
Table 4.
After inputting all the parameters, the analysis results are obtained after solving the dynamic equations. Since the aircraft is in a symmetric landing attitude, the left and right MLG dynamics results are basically the same, so only the unilateral MLG dynamic performance can be analyzed (the left MLG is taken as an example in this paper).
- (1)
Influence analysis of PSB filling parameters during the landing process.
DOE is a systematic approach designed to help researchers optimize experimental design and improve experimental efficiency and accuracy. The core principle of DOE is to find the main factors affecting the response variable by systematically varying the experimental factors and to observe the changes in the response variable [
18,
19,
20].
The PSB mainly absorbs the energy generated by the violent vibration of the frame at the landing instant through oil damping. Therefore, when designing the test condition based on the DOE principle, the effect of the oil damping coefficient on the dynamic performance of the MLG can be investigated by controlling the air spring stiffness, leaving it unchanged.
Based on the DOE design principle, the first group of simulation conditions is set up with PSB not working, and this acts as a comparison reference group. In addition, two groups of normal PSB working conditions are added. The first group adjusts the filling air pressure to 10 MPa and the diameter of the damping hole to 11.2 mm, which converts the air spring stiffness to 13,000 N/m, and the oil damping coefficient to 107,000 N.s
2/m
2; the other group keeps the filling air pressure unchanged at 10 MPa and adjusts the diameter of the damping hole of PSB to 10 mm, which allows the damping coefficient to reach 175,000 N.s
2/m
2. The simulation condition settings are shown in
Table 5.
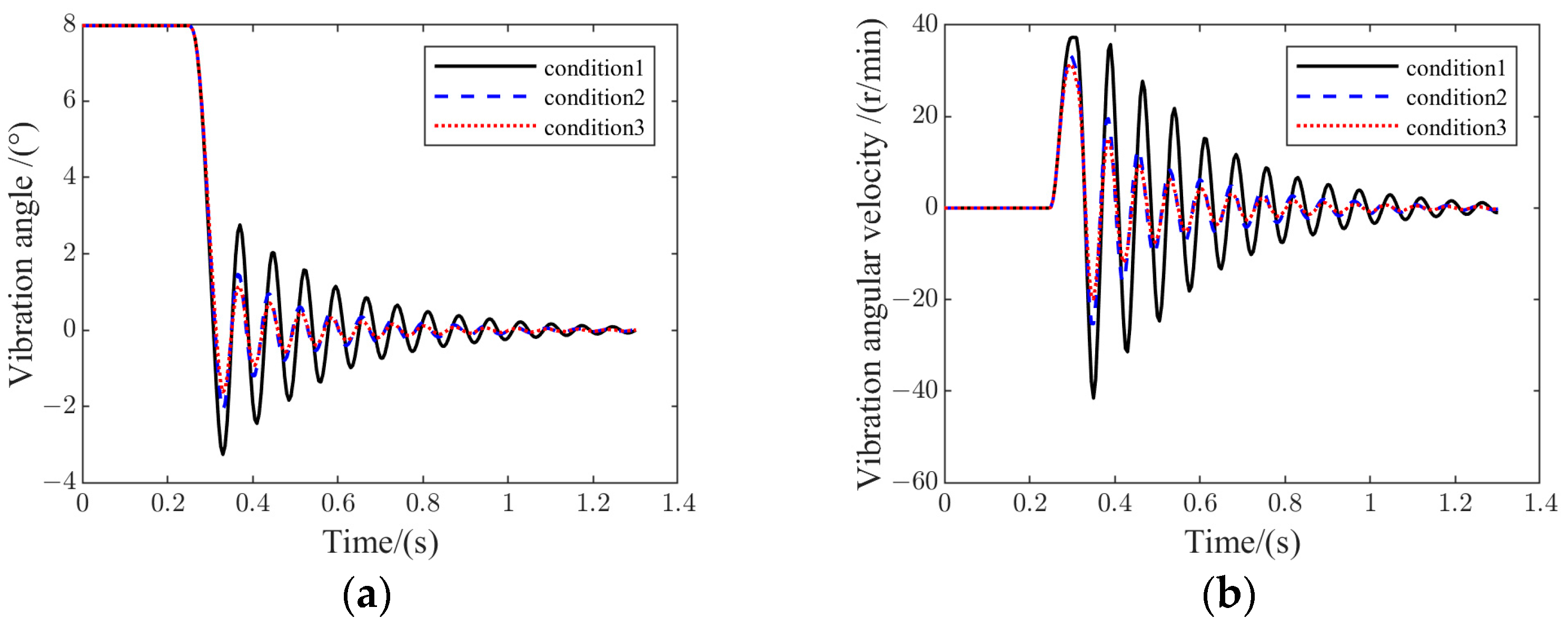
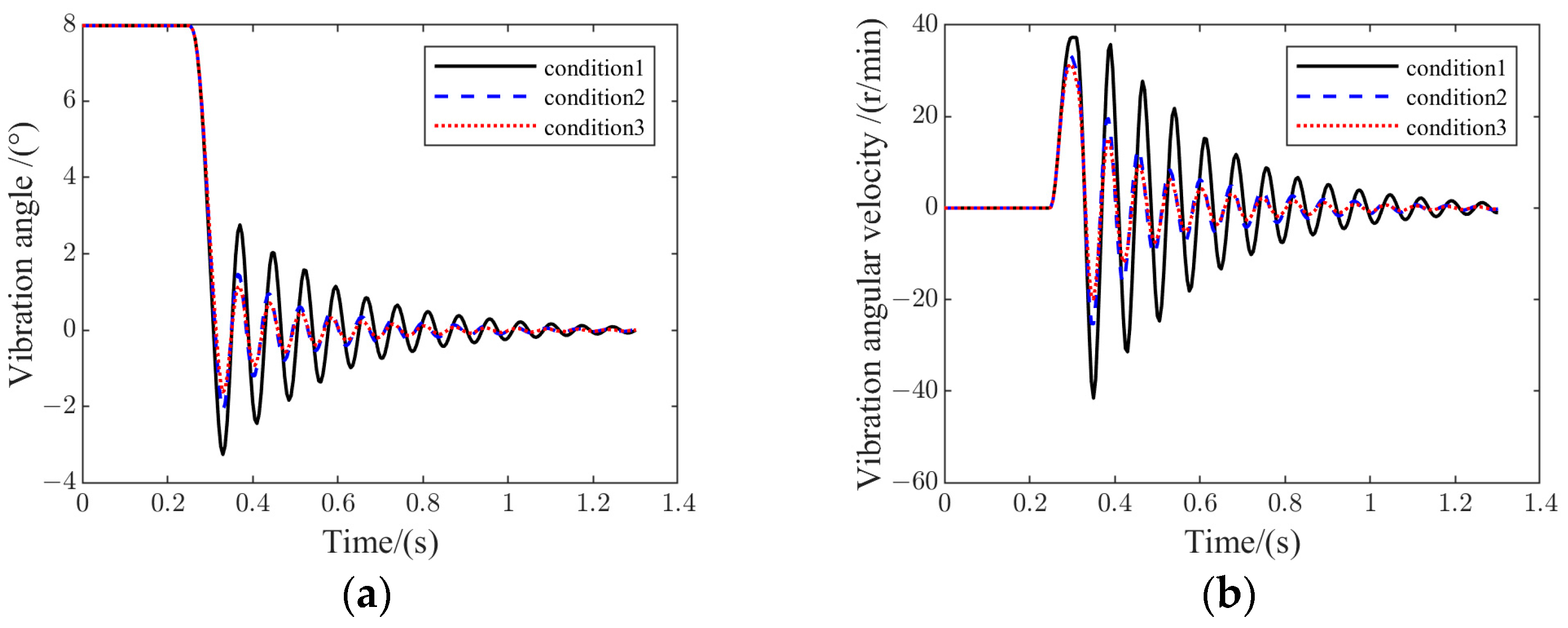
Figure 9 represents the results of frame vibration variation for conditions 1, 2, and 3.
It can be found that the frame vibration angle angular velocity of condition 1 is much larger than that of conditions 2 and 3. The convergence speed is slow, which indicates that when PSB does not work, the frame vibration is intense and the vibration energy is difficult to be absorbed. The comprehensive results of the three conditions show that the amplitude of the frame vibration angle and angular velocity tend to decrease as the oil fluid coefficient becomes larger. This shows that increasing the oil damping coefficient can effectively absorb the frame vibration energy.
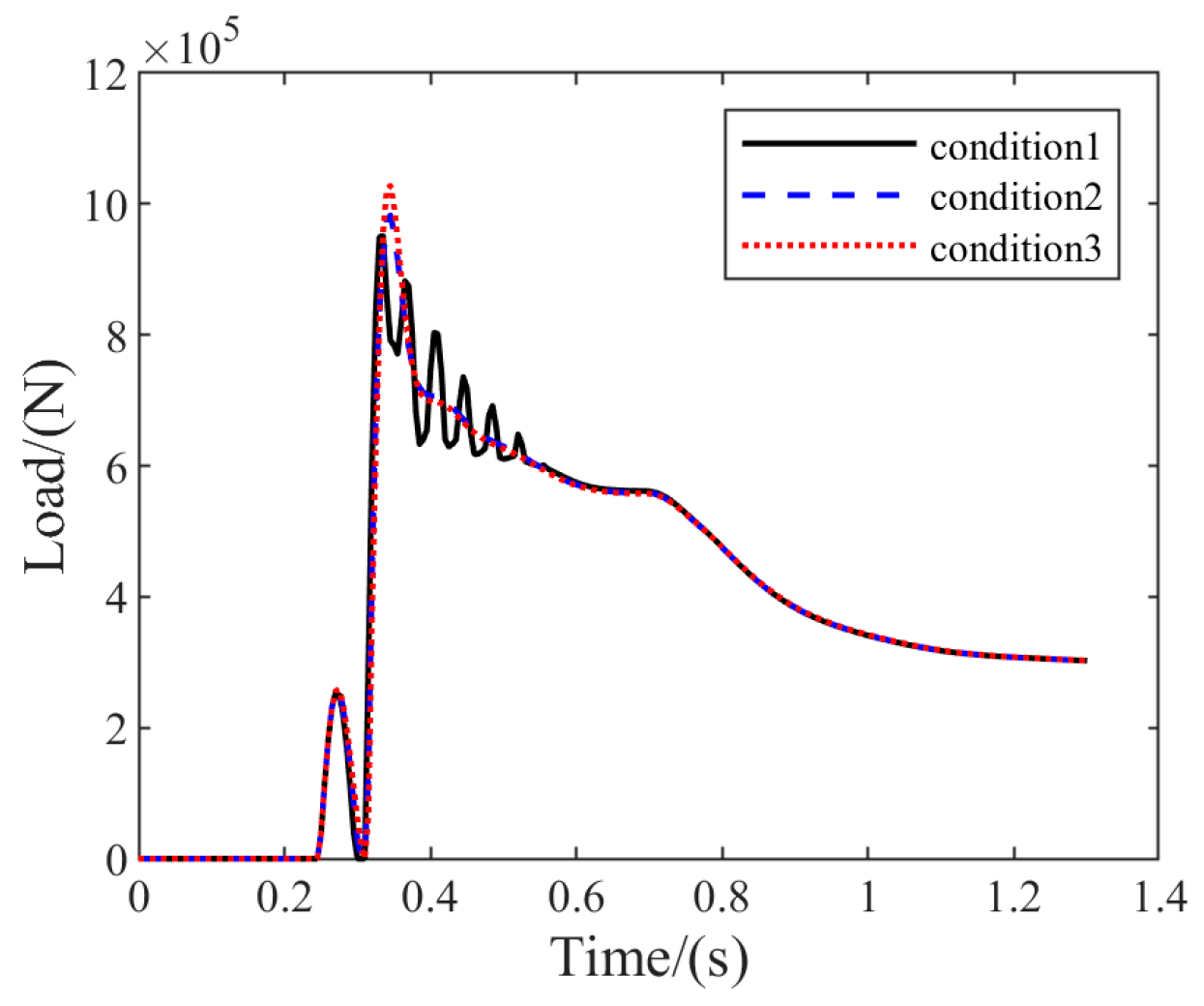
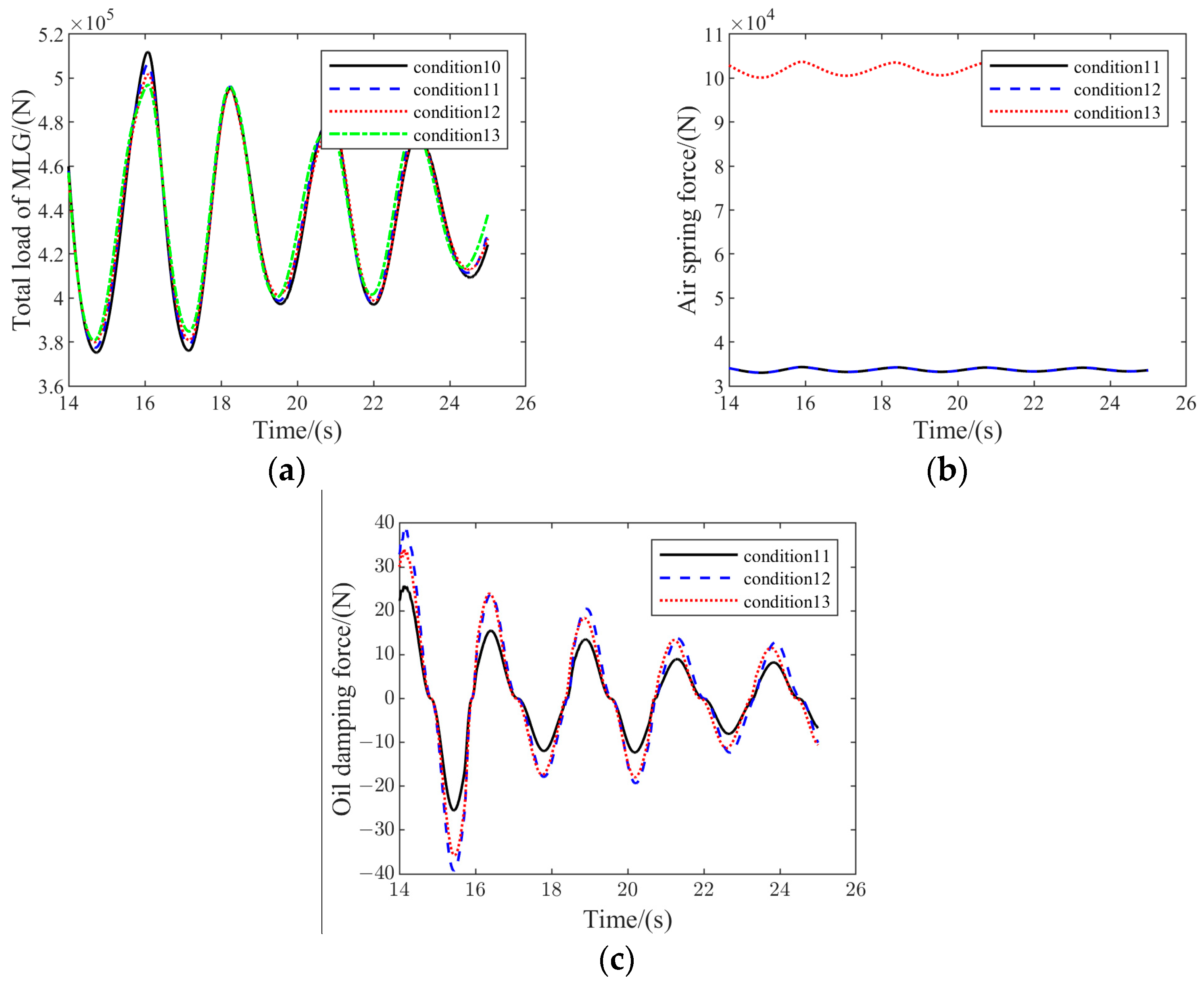
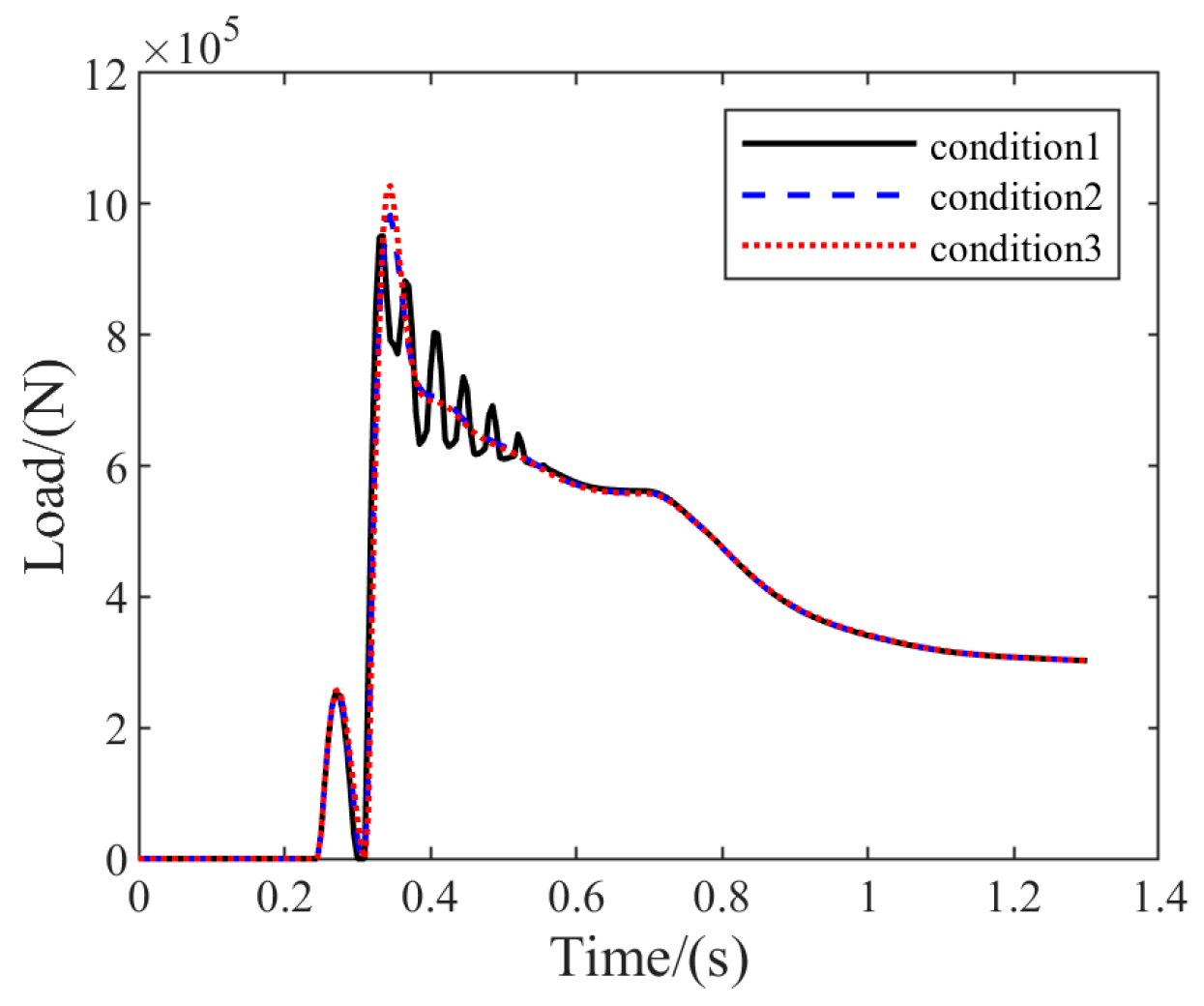
Figure 10 demonstrates the results of the total MLG vertical load variation for conditions 1, 2, and 3.
Combining the results of conditions 1 to 3, it can be seen that the total MLG vertical load increases as the oil damping coefficient increases, and the maximum vertical load increases from 967,077 N under condition 1 to 1,027,700 N under condition 3. This indicates that the increased damping coefficient leads to an expansion of the vertical overload of the MLG.
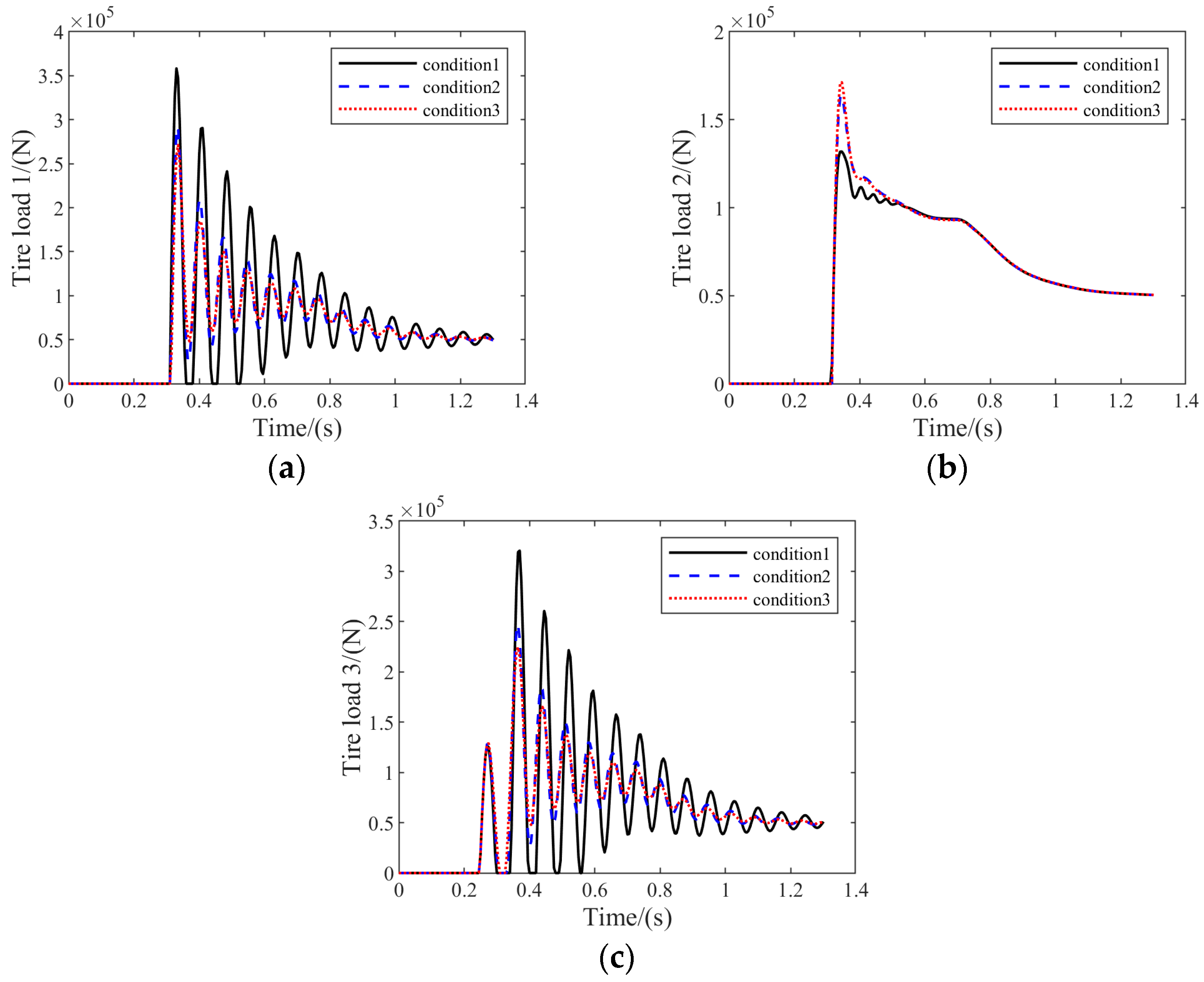
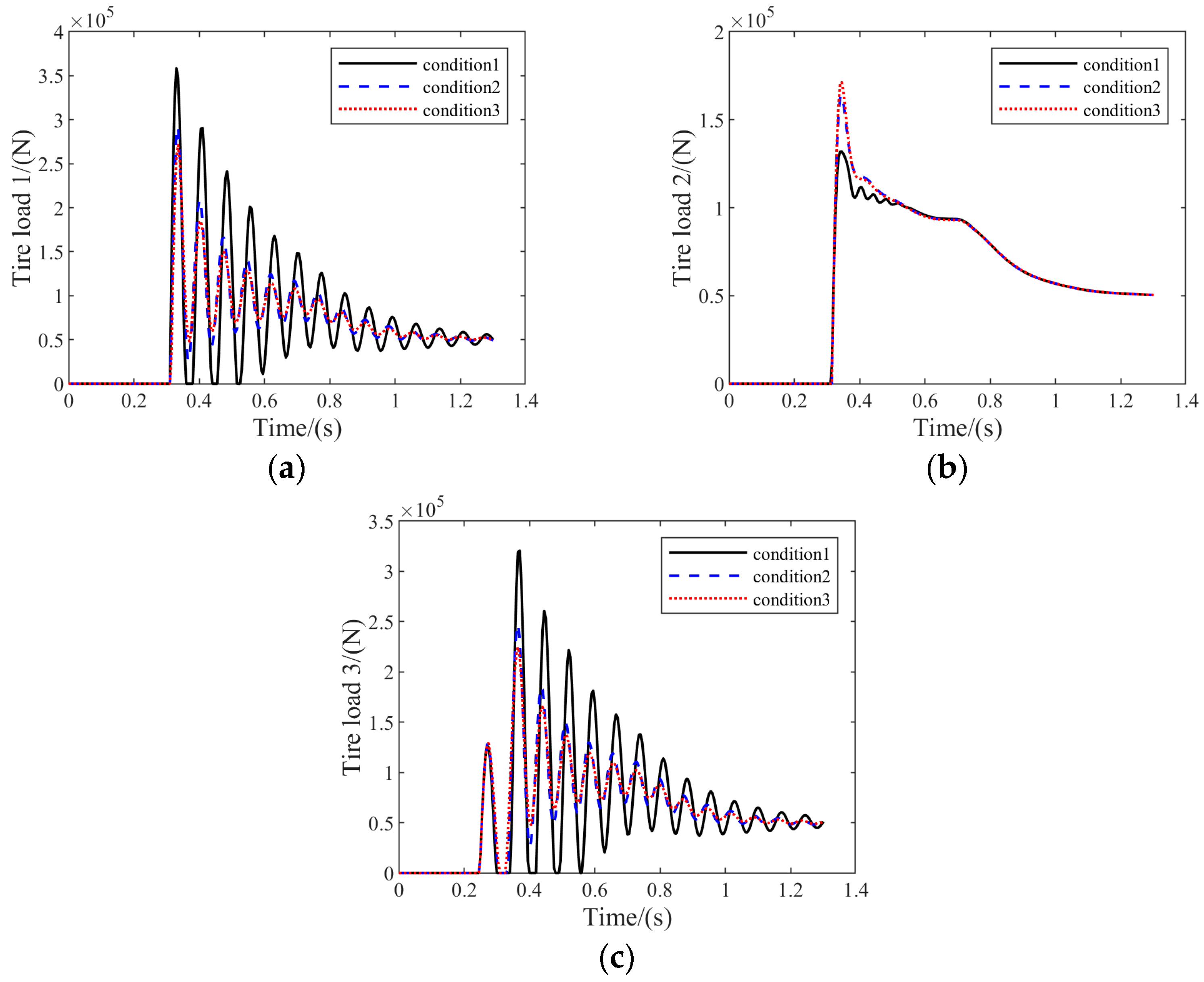
Figure 11 represents the results of variation in the vertical loads of different tires of MLG for conditions 1, 2, and 3.
The ratio of the FTLG front, middle, and rear wheelset loads reflects the frame balance performance; a lower ratio indicates a better frame balance effect. The six tires of FTLG are symmetrically distributed along the frame axis, so the ratio of the three tires’ loads on one side of the frame can be analyzed to characterize the ratio of the wheelset loads. From the analysis results of conditions 1~3, it can be seen that the rear wheel (tire 3) is the first to touch the ground in all conditions because the frame has an 8° head-up angle. In condition 1, due to the absence of PSB, tire 1 and tire 3 have a zero load in the first few oscillation cycles, which indicates that the front and rear wheels jumped off the ground in the landing process. This may seriously affect the structural safety of the landing gear. Comparing the analysis results of condition 2 and condition 3, with the increase in the oil damping coefficient, the ratio of the vertical load of the front wheel group, middle wheel group, and rear wheel group decreases from 4.3:3.3:2.4 in condition 2 to 4.2:3.3:2.5 in condition 3 at the moment of maximum vertical load. This indicates that the increase in the damping coefficient can balance the front and rear tires to a certain extent.
The peaks of the simulation test results for working conditions 1~3 are counted, and are shown in
Table 6. It can be concluded that for the aircraft landing stage, the increase in the PSB damping coefficient contributes to suppressing the vibration of the frame, but it increases the MLG overload.
- (2)
Influence analysis of PSB structural parameters during the landing process.
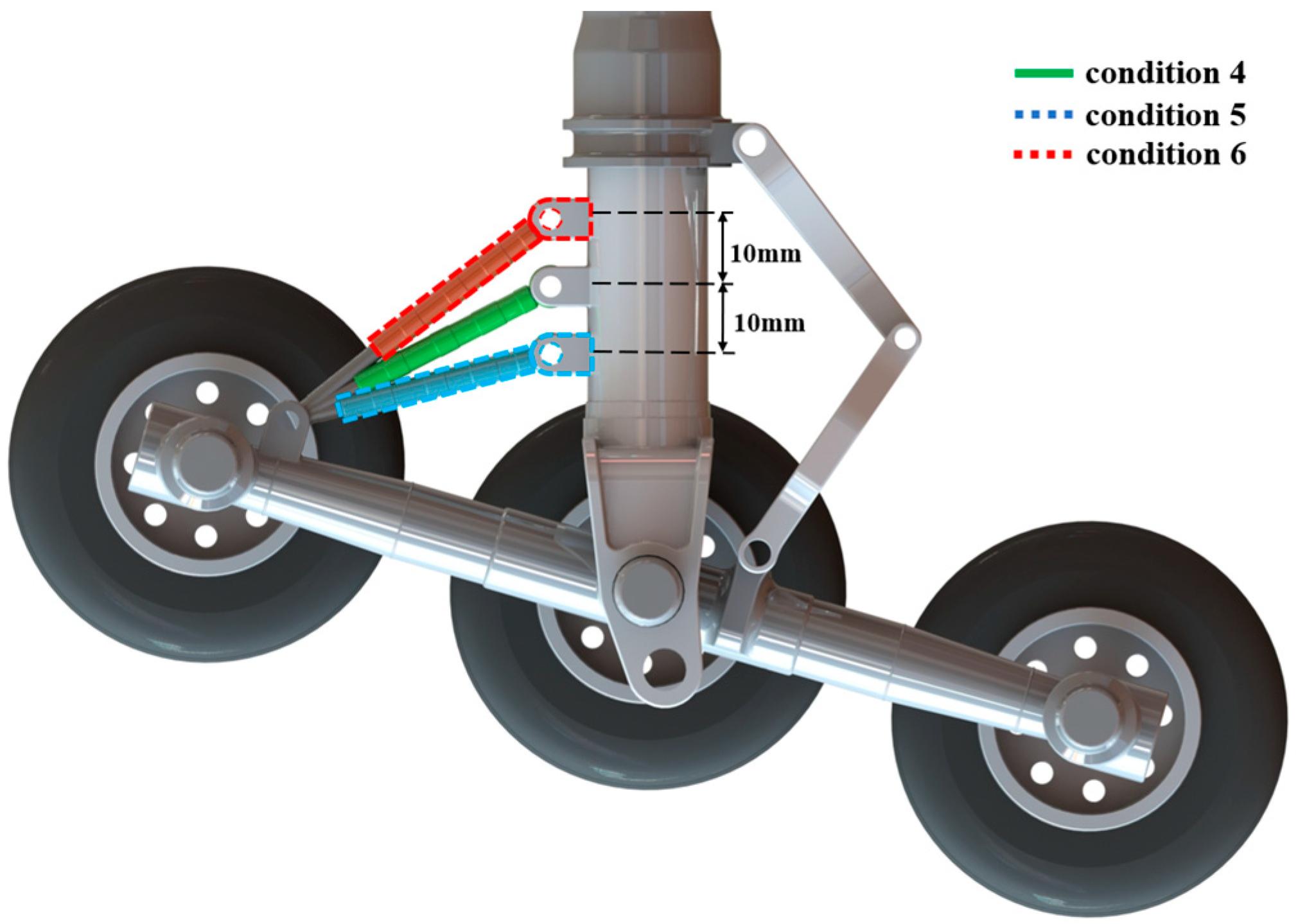
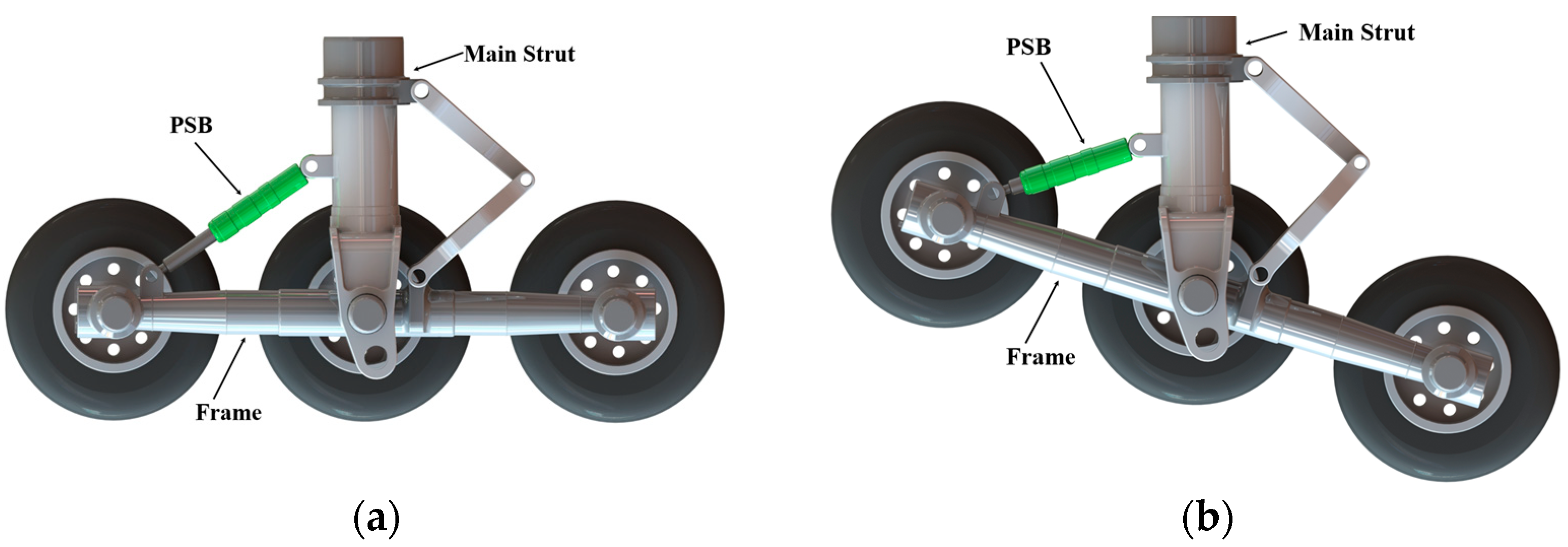
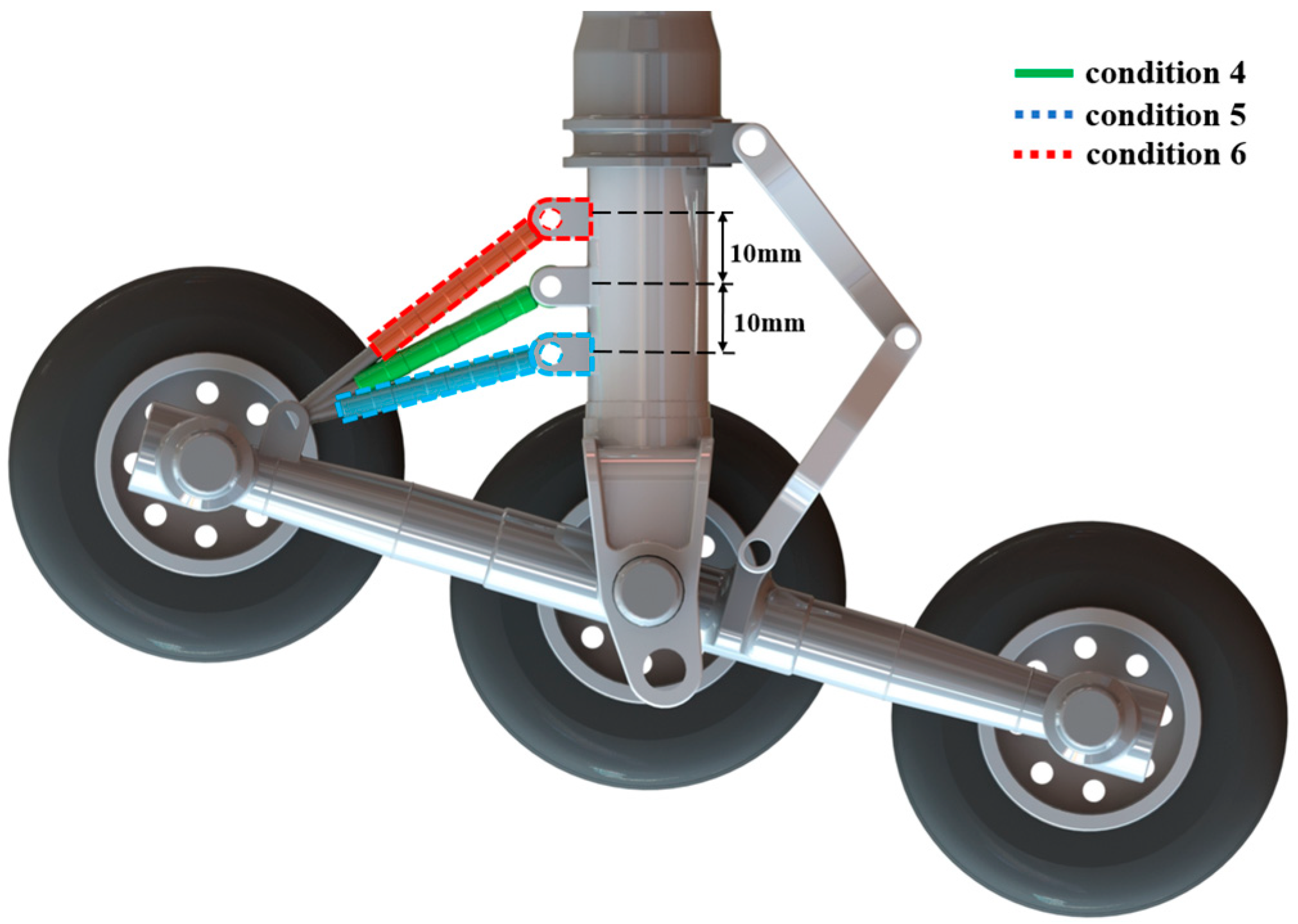
The influence analysis of structural parameters in this paper was achieved by changing the installing angle of the PSB to ensure the regularity of the simulation’s working condition settings. As shown in
Figure 12, we kept the installation point of one end of the frame unchanged. Three groups of different conditions were designed by adjusting the installation point of the cylinder end of the PSB on the main strut.
The PSB installation point position cannot be adjusted too much to prevent the compression of the main buffer from causing interference between the cylinder of the landing gear and the PSB. Hence, in the analysis described in this paper, taking the initial installation point of the cylinder of PSB as the reference, the installation point of PSB at one end of the main strut was adjusted upward and downward by 10 mm, and the air spring stiffness and the oil damping coefficient were kept the same as the parameters of condition 4. The simulation conditions were set up as shown in
Table 7.
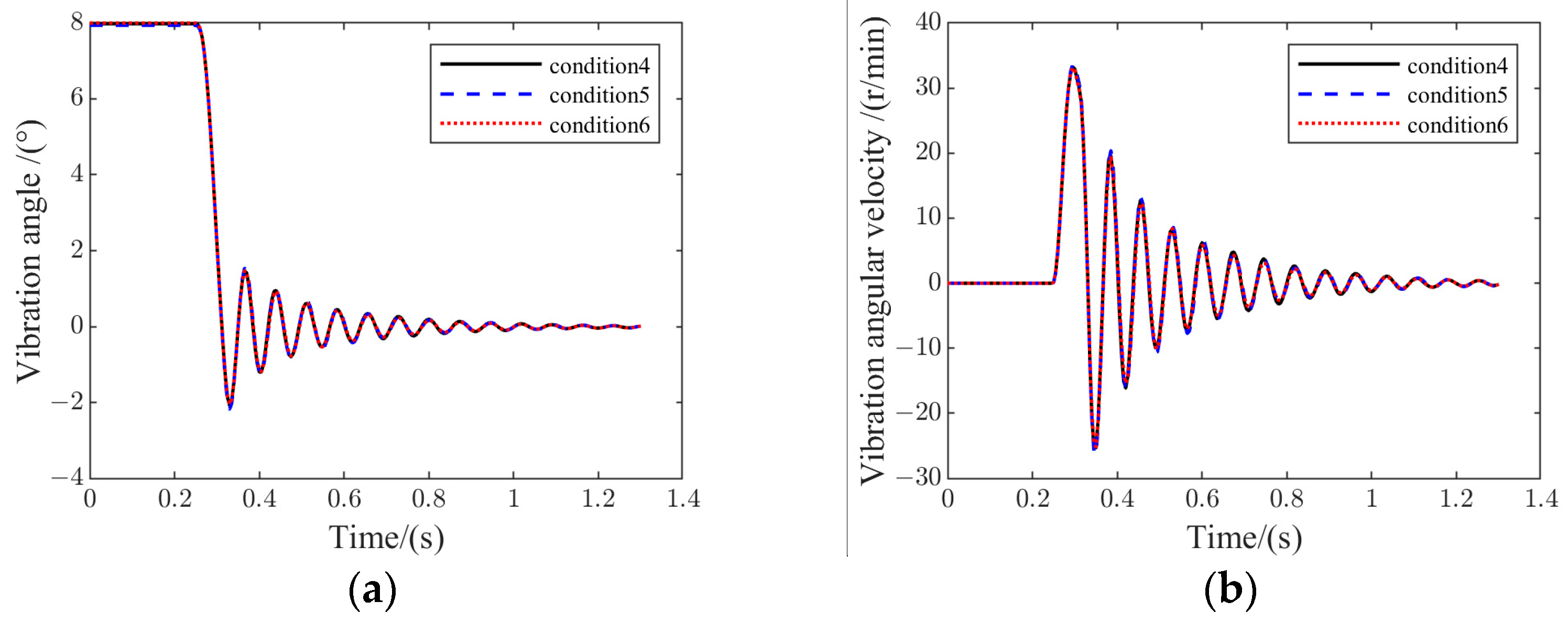
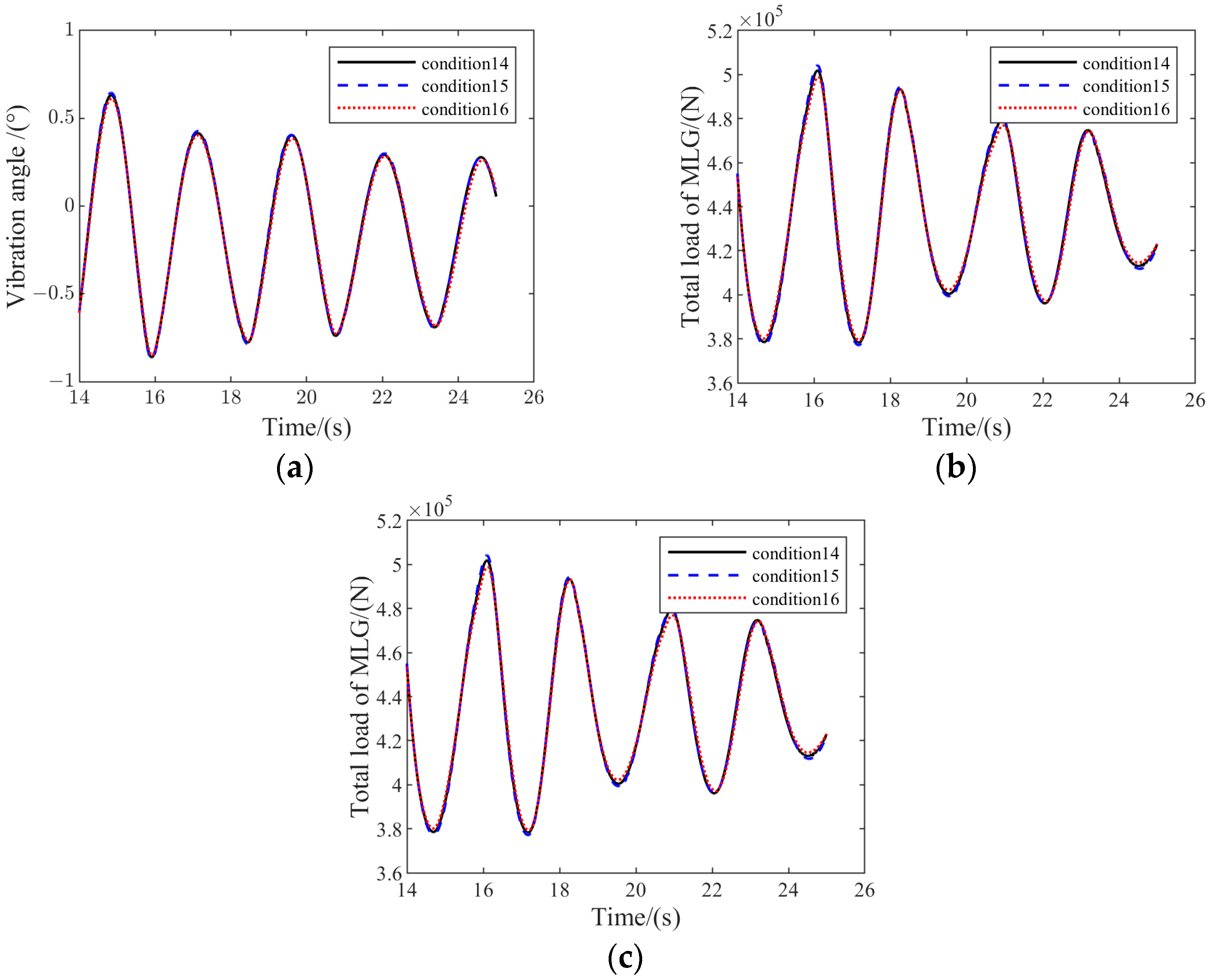
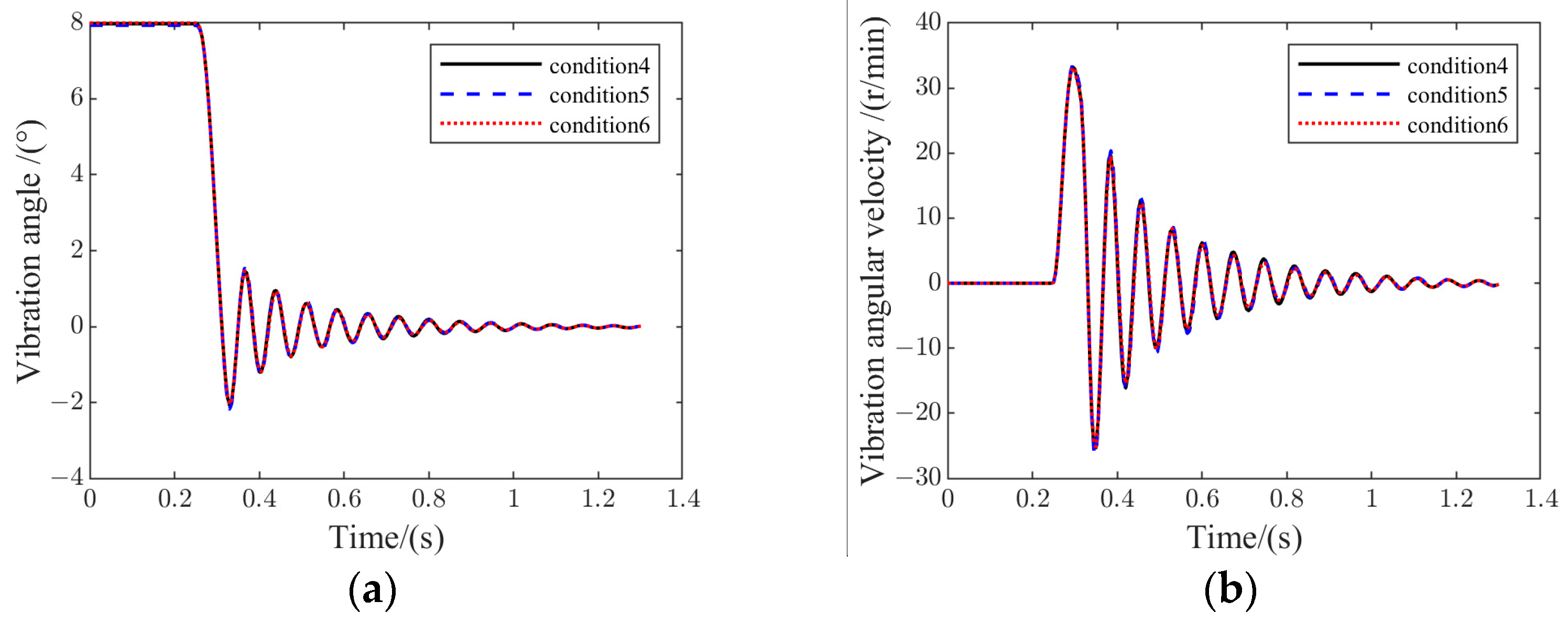
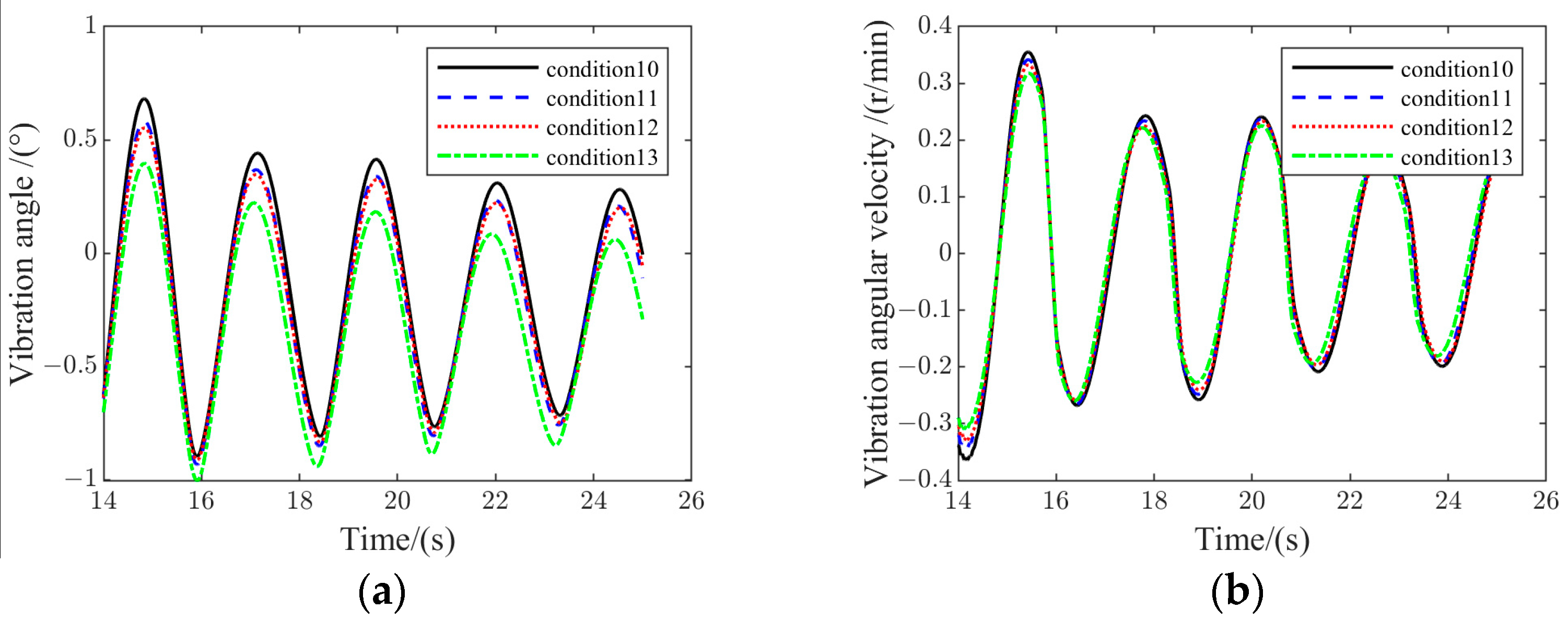
Figure 13 demonstrates the results of frame vibration variation for conditions 4, 5, and 6.
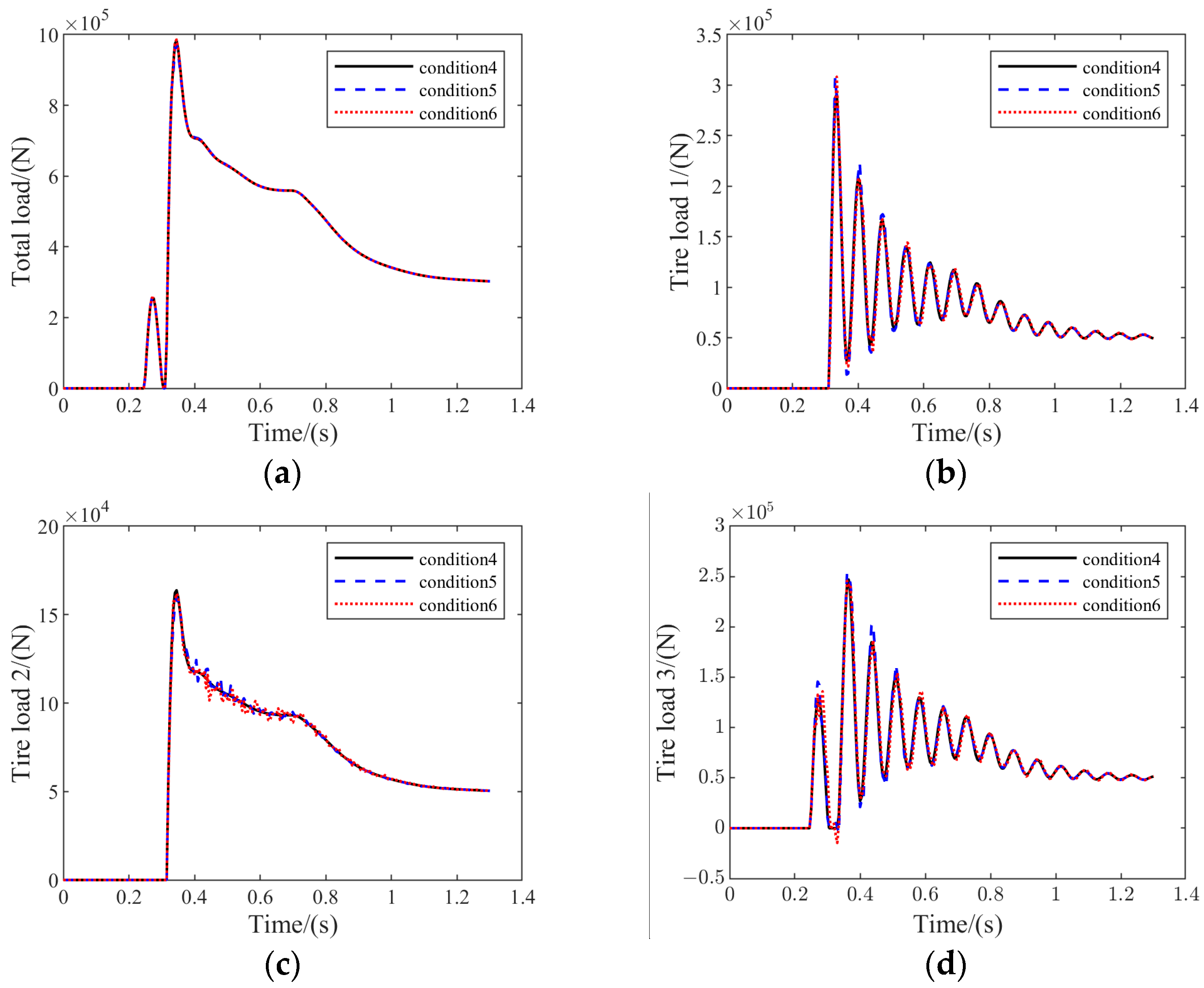
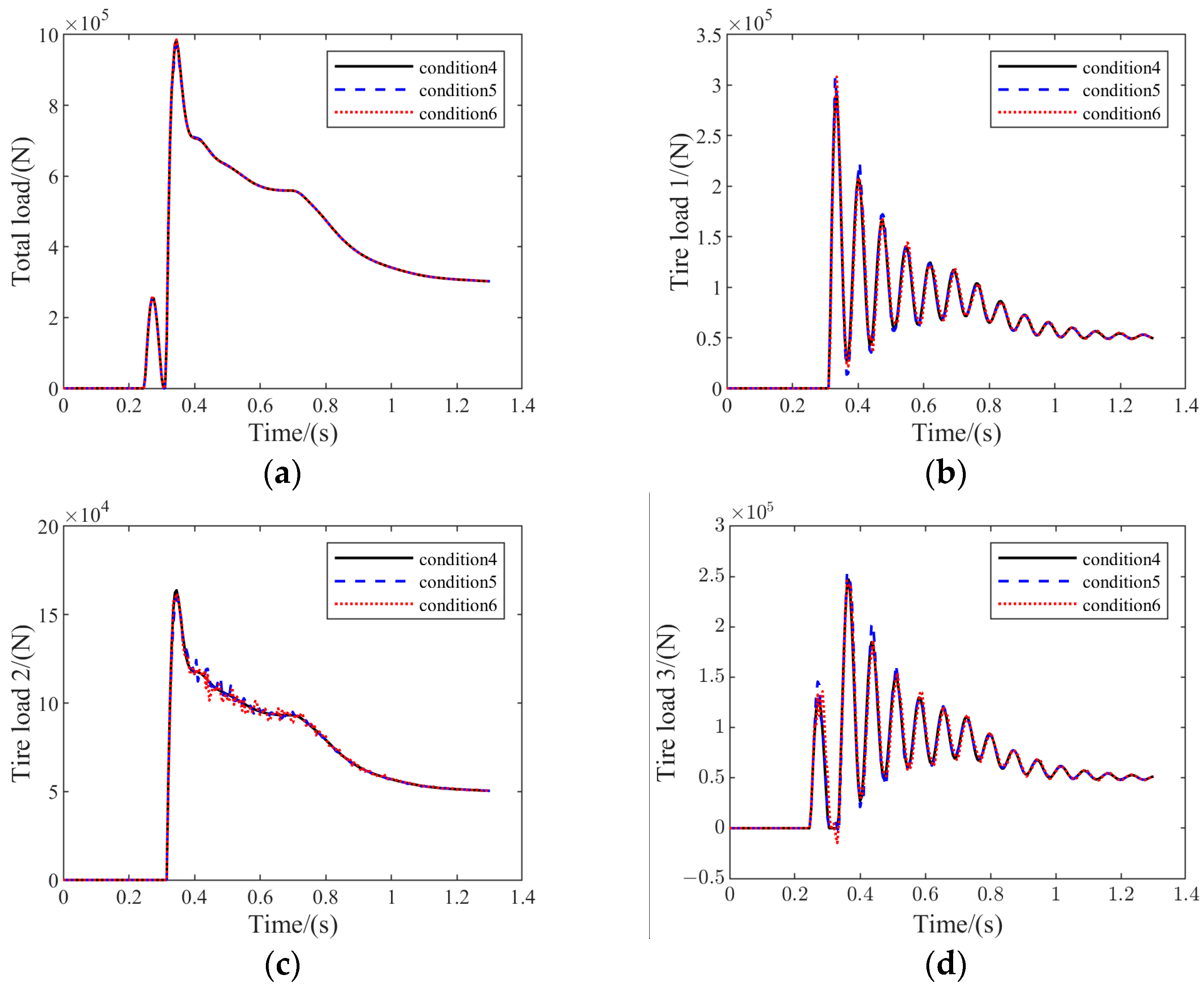
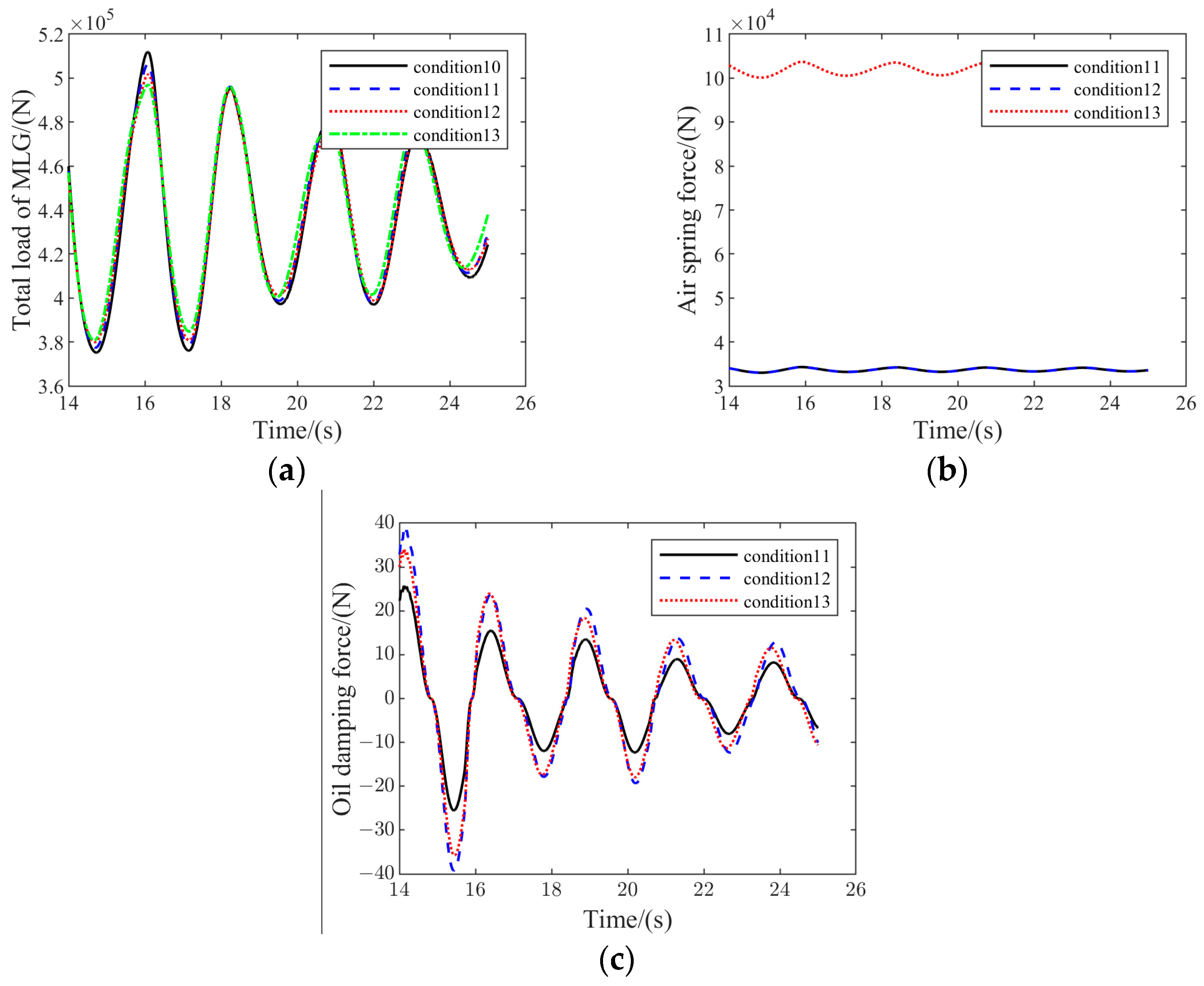
Figure 14 illustrates the results of MLG and tire load variation for conditions 4, 5, and 6.
Figure 14 reveals that the total vertical MLG loads and tire loads also changed to a very minor degree. The ratio of total vertical MLG loads to vertical tire loads tended to increase slightly as the PSB installation point became higher.
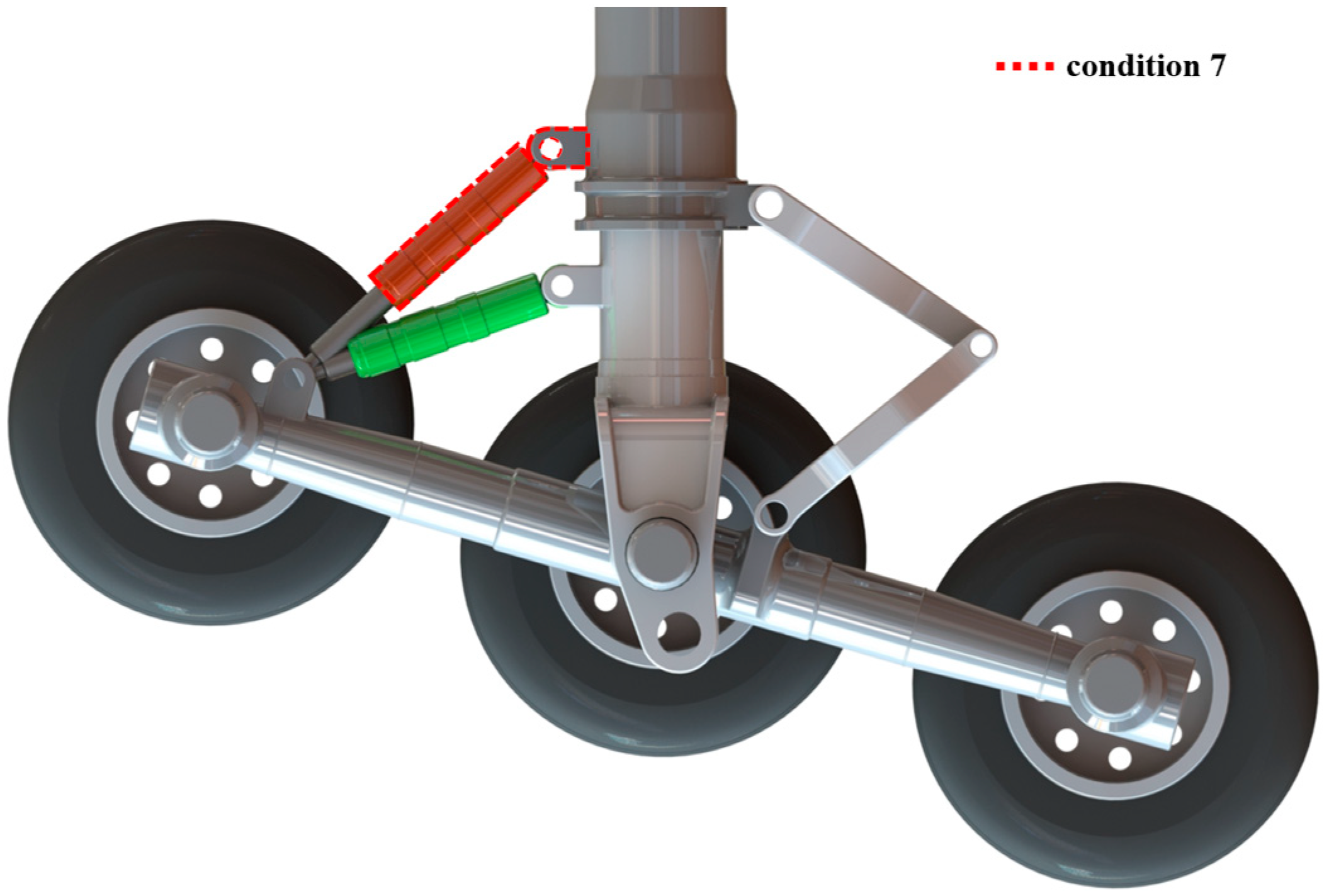
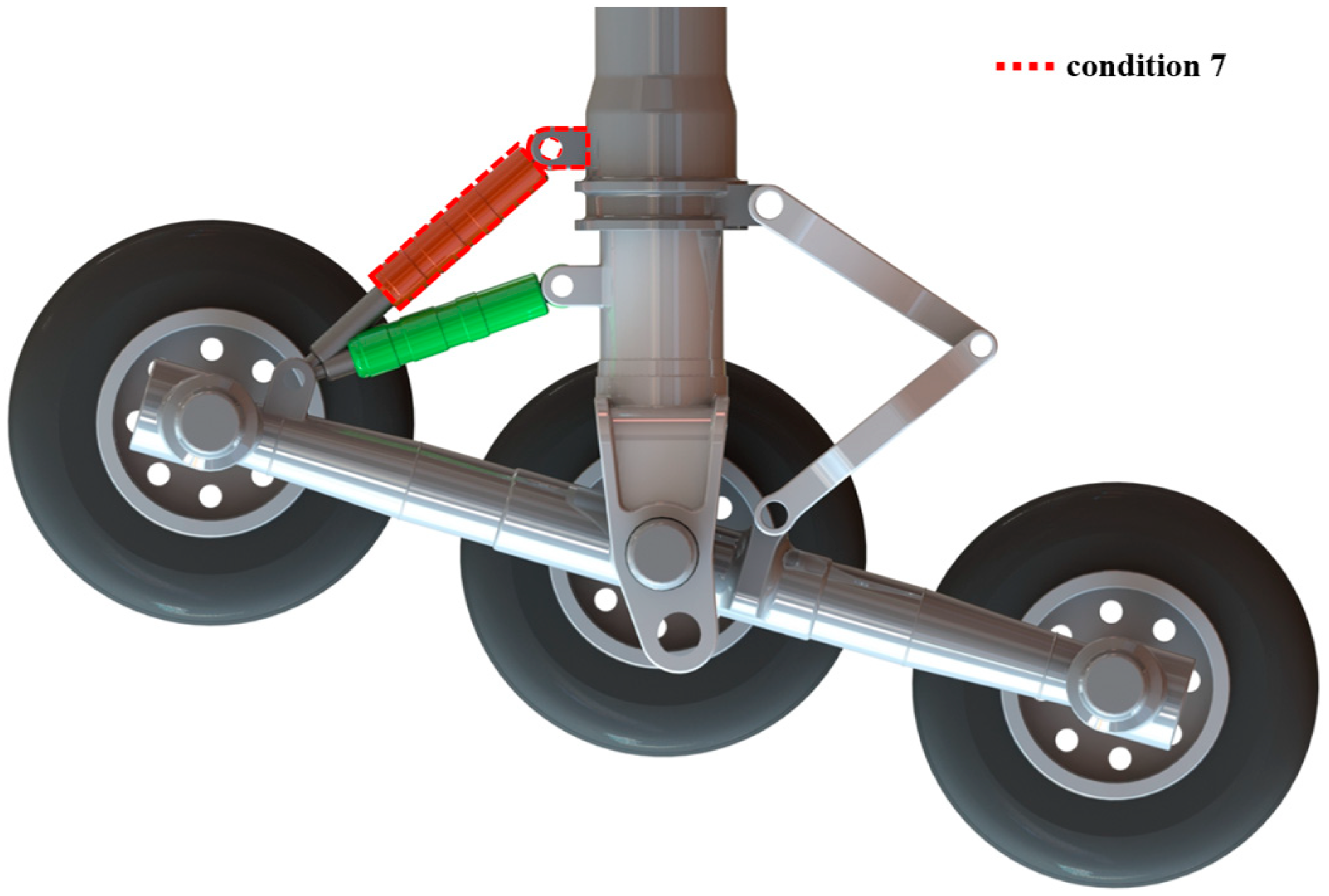
According to the above analysis results, the changes in the frame vibration and load changes were relatively small. This was due to the limitation of the physical structure of the landing gear, whereby the compression stroke of the main buffer was large during the landing process. Thus, the adjustment space of the PSB’s installed position on the piston rod of the landing gear was also limited. To further validate the effect of the PSB installing angle on the dynamic performance of the landing gear, a new condition, 7, as shown in
Figure 15, can be added to articulately mount the PSB on the outer cylinder end of the main strut to further reduce the PSB installation angle.
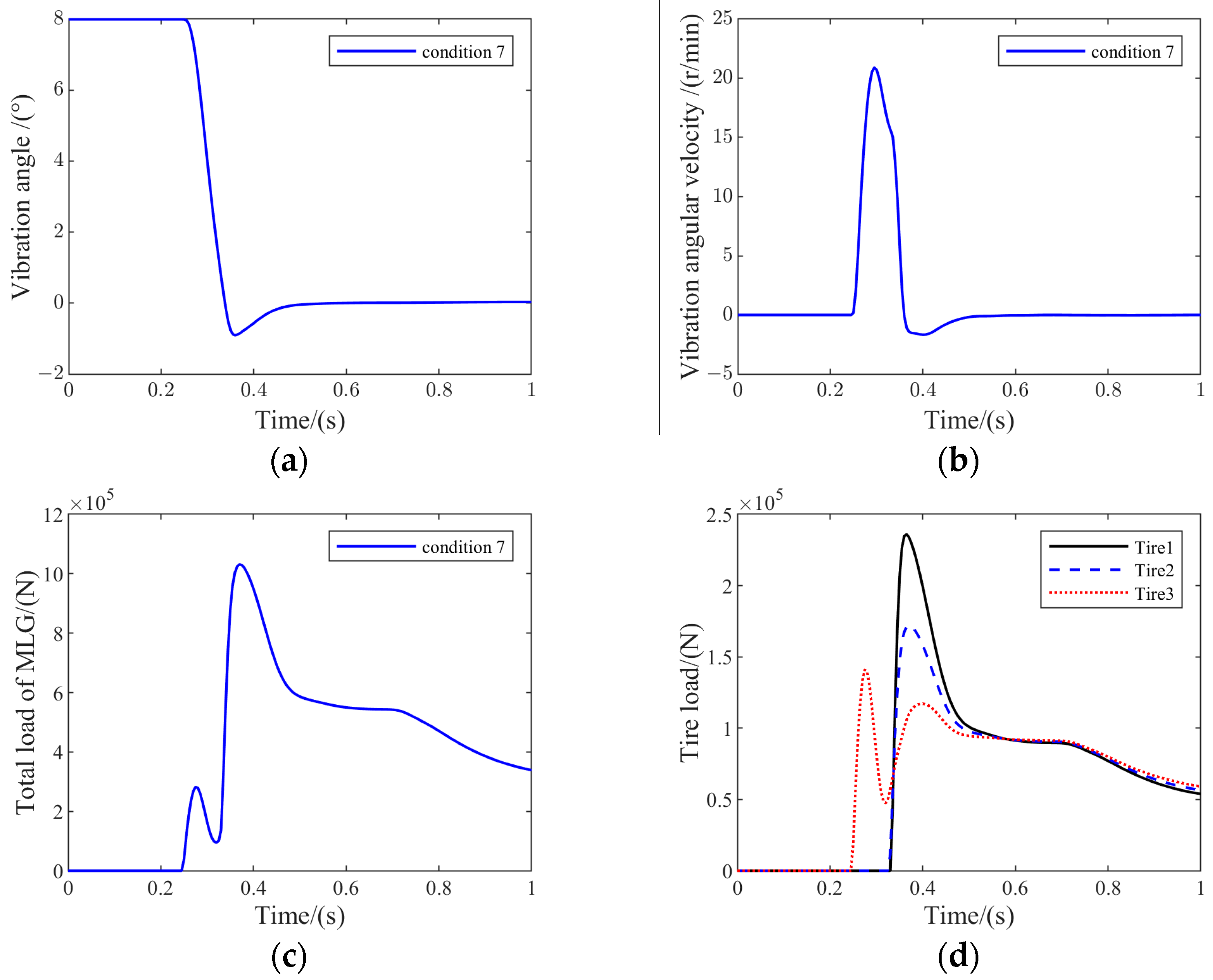
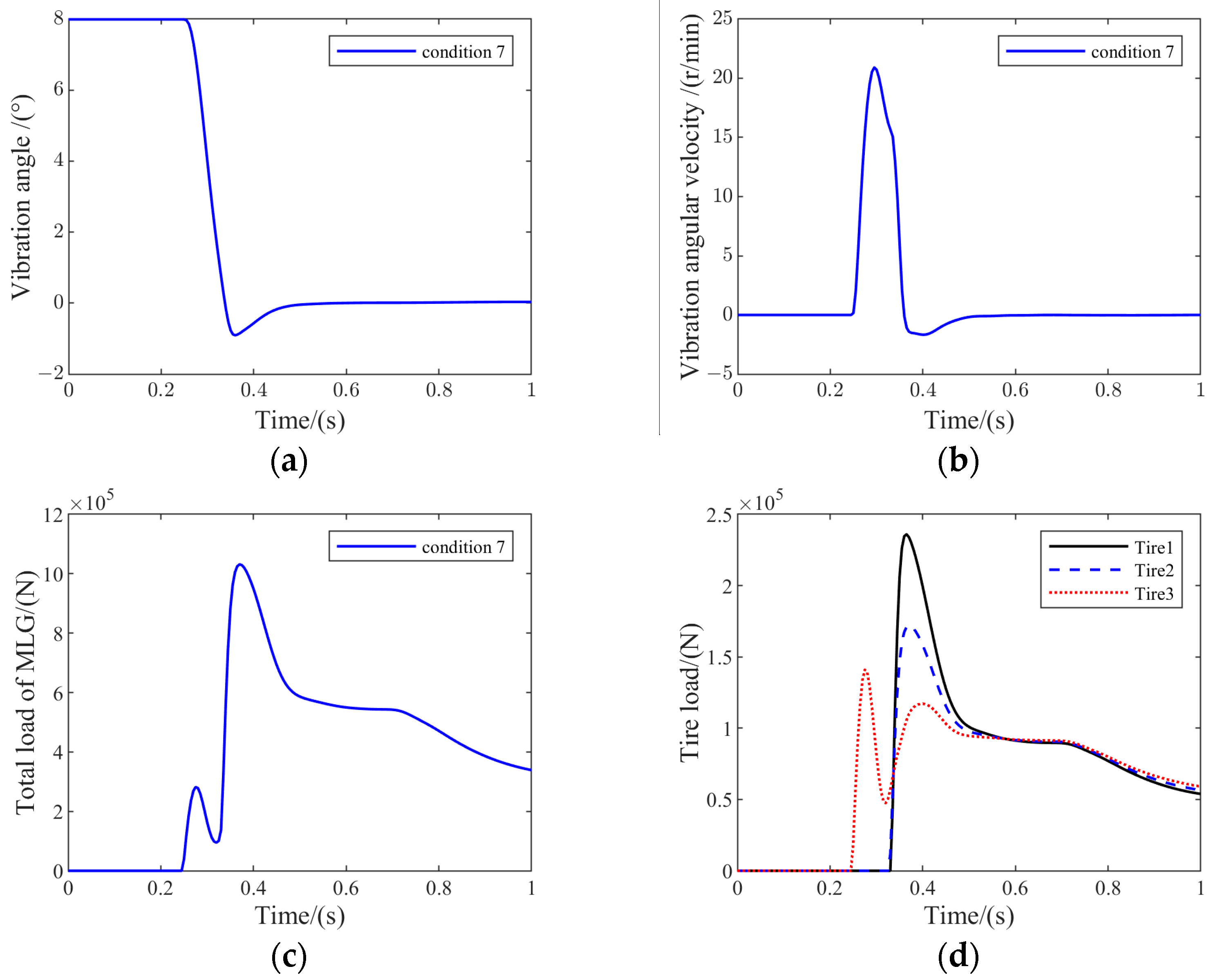
Computational simulation analysis was carried out, and
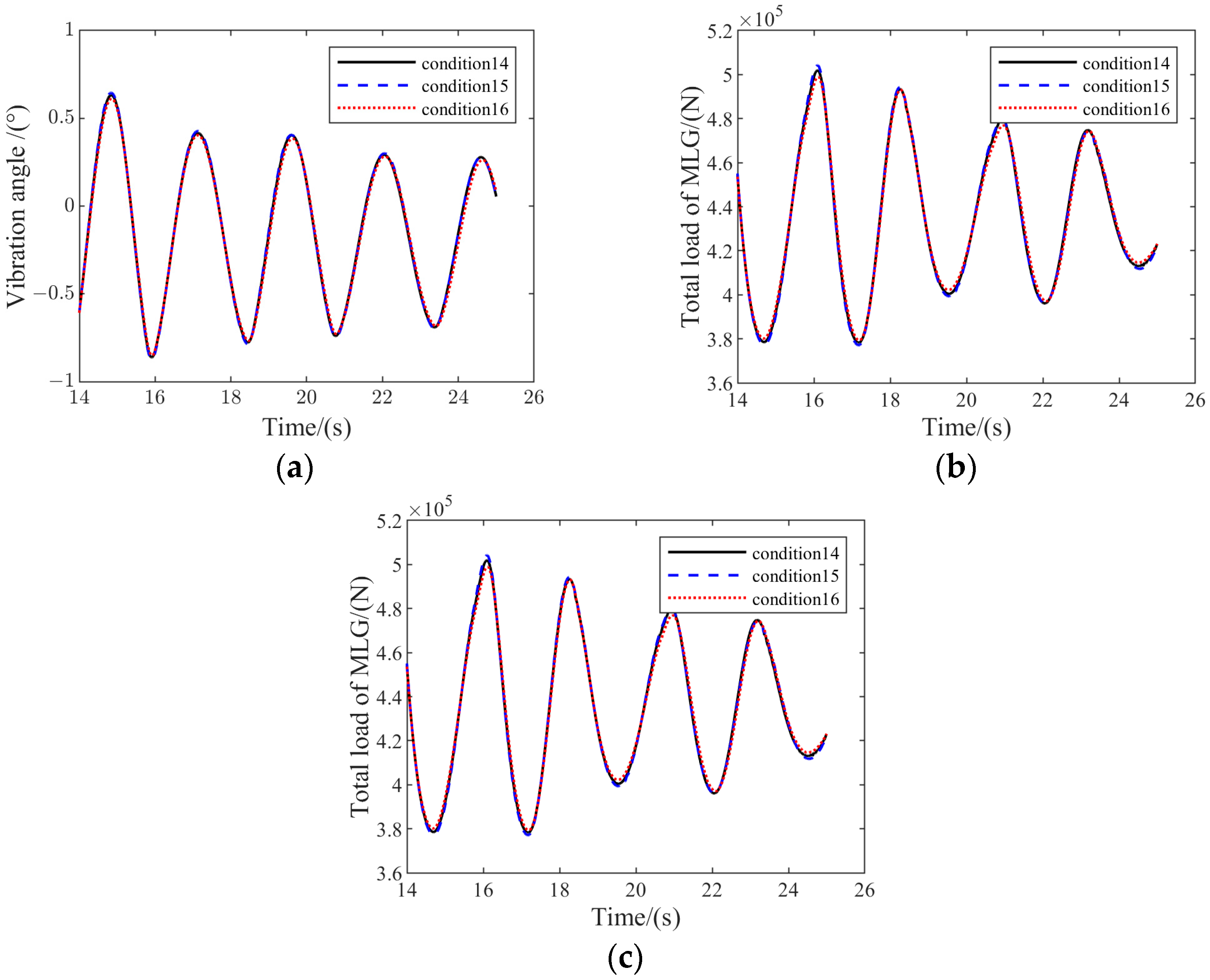
Figure 16 represents the results of the landing gear dynamic performance variation for condition 7.
Compared with the analysis results of conditions 4, 5, and 6, the frame vibration angle and the vibration angular velocity of condition 7 were significantly reduced. The maximum head-down angle of the frame was 0.9°, and the maximum vibration angular velocity peak was 21 r/mi. All of them entered into the convergence stage after one vibration cycle, which indicates that there was a significant inhibition of frame vibration at this time. However, with the further reduction in the installation angle, the total vertical load of the MLG also increased significantly, making the vertical overload of the landing gear during landing grow significantly.
The results of the peak values of working conditions 4~7 are summarized as shown in
Table 8. It can be seen that the frame stability during airplane landing was related to the PSB installation position. Under the premise that the PSB filling parameters remained unchanged, as the PSB installation angle decreased, the frame vibration angle and angular velocity decreased, and the vibration of the frame was suppressed. Nevertheless, the total vertical load and wheelset load ratio of the MLG increased, which was not conducive to controlling the landing overload of the landing gear and balancing the wheel loads.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}