
Parameter Tuning of a Vapor Cycle System for a Surveillance Aircraft


Abstract
1. Introduction
- Identify the design parameters of the cooling system.
- Investigate the impact on the cooling capacity of the system by manipulating the design parameters and thereby understand the performance limits of the system.
- Optimize the control strategy of the VCS and its components for static and transient operation.
1.1. Purpose of Paper
1.2. Outline of Paper
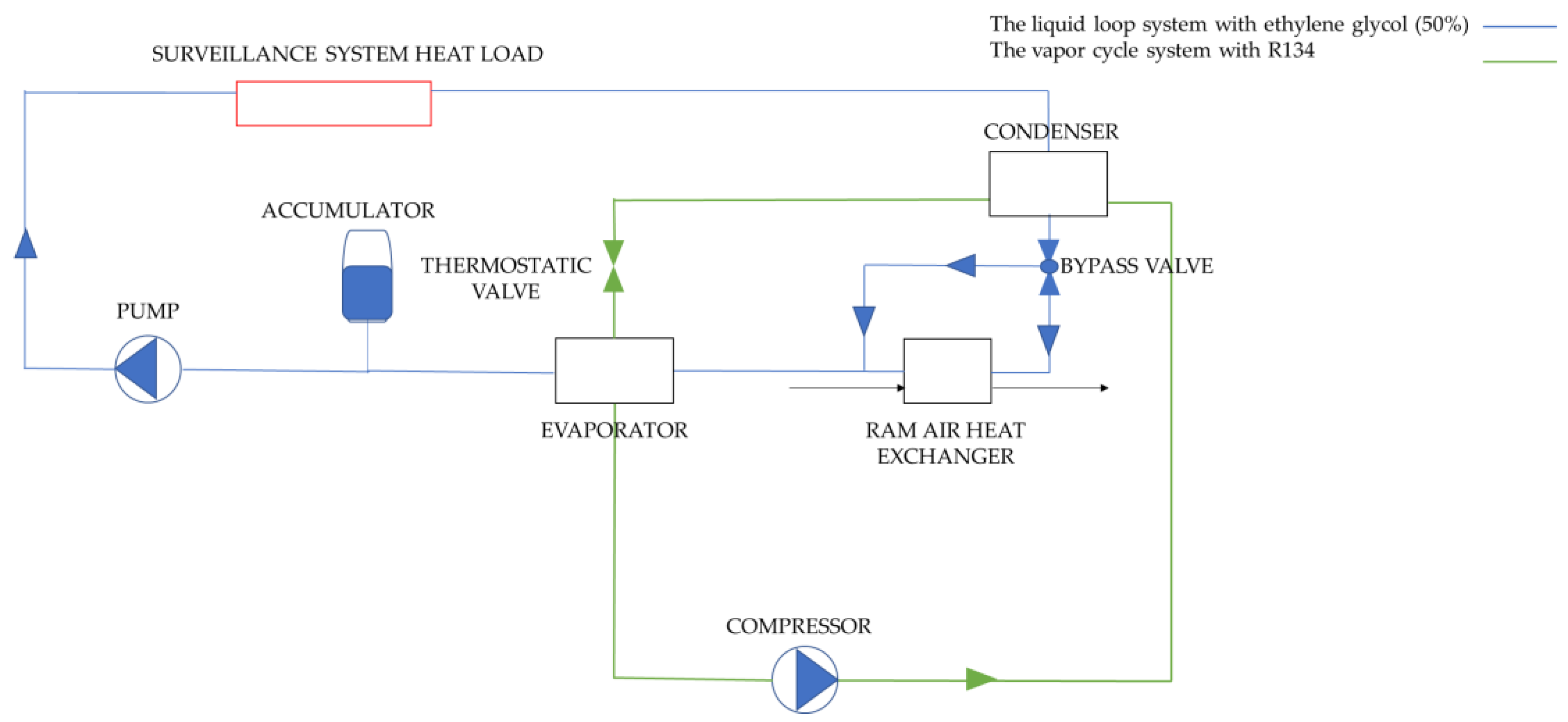
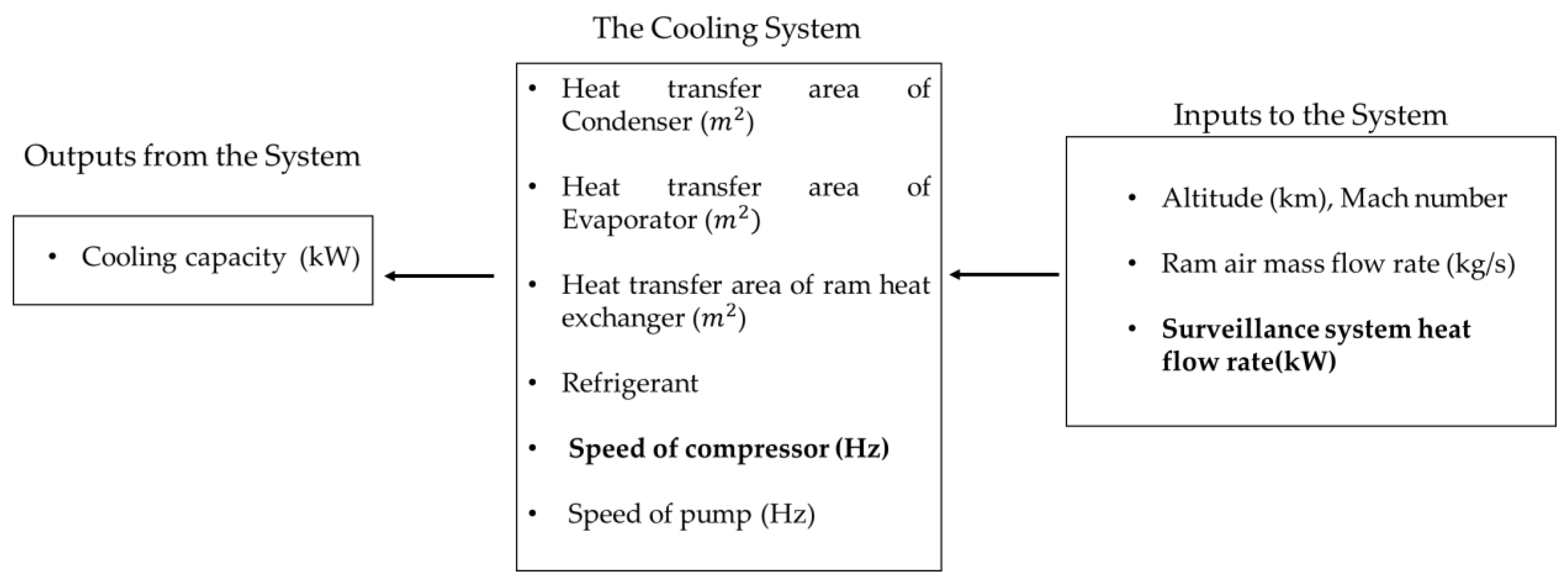
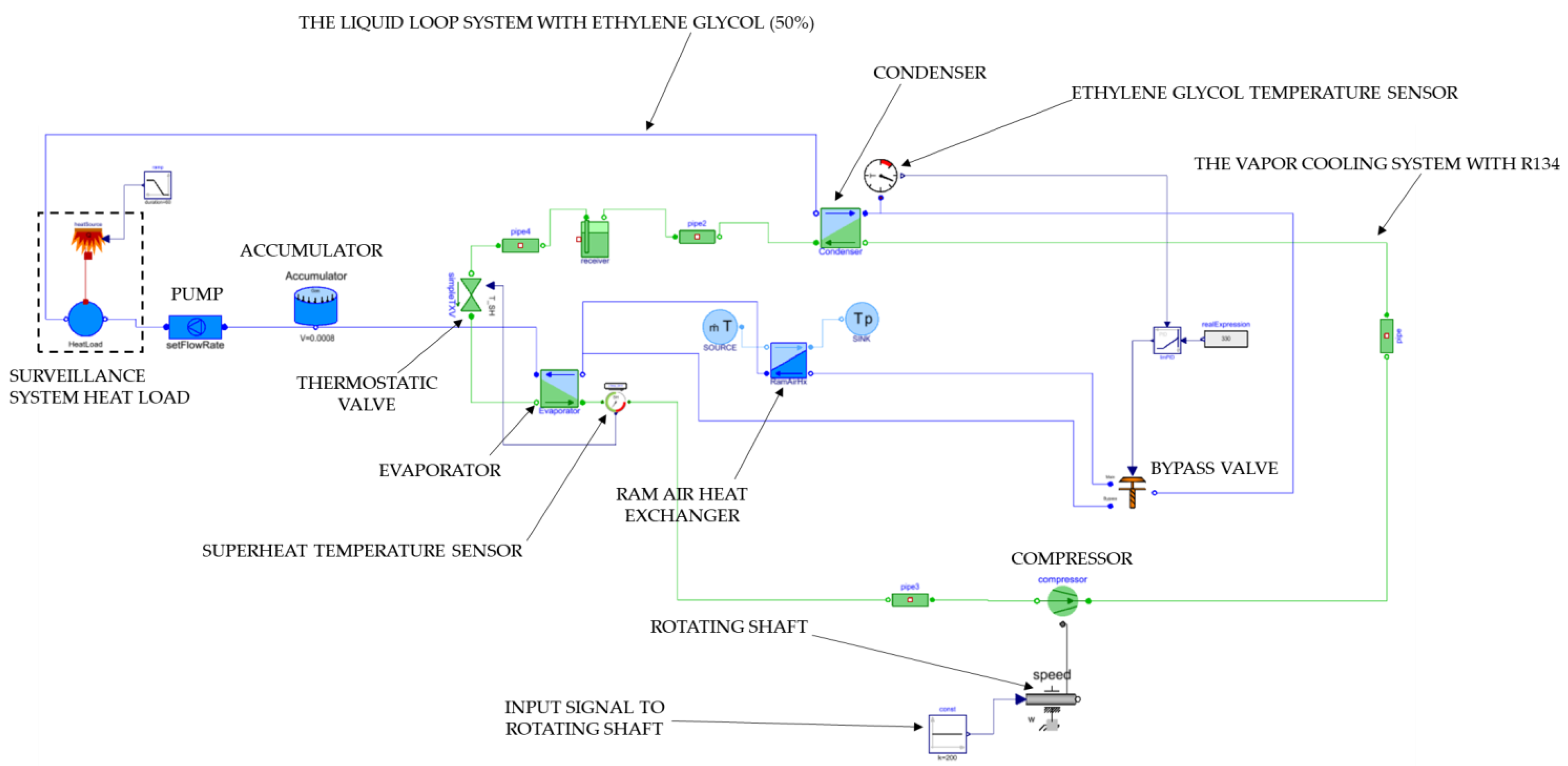
2. The Cooling System
2.1. The Liquid Loop System
2.2. The Vapor Cycle System
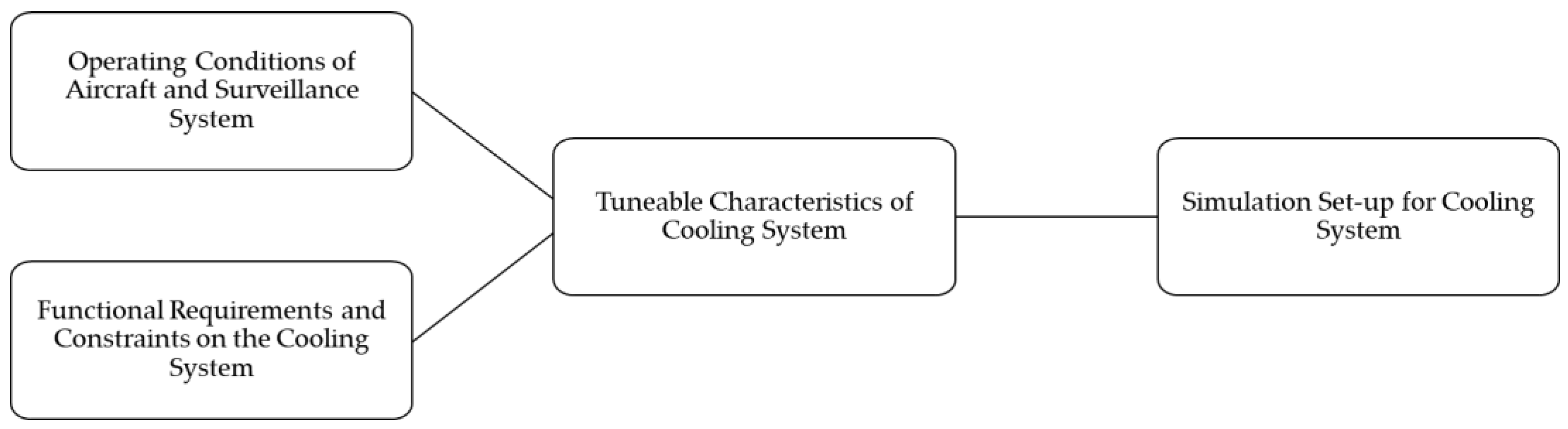
3. Method Part 1: Parameter Tuning Study Set-Up
3.1. The Operating Conditions of the Aircraft and Surveillance System
3.2. Functional Requirements and Constraints on the Cooling System
- Functional Requirement 1: The cooling system must collect the heat load produced by the surveillance system and dispose it overboard.
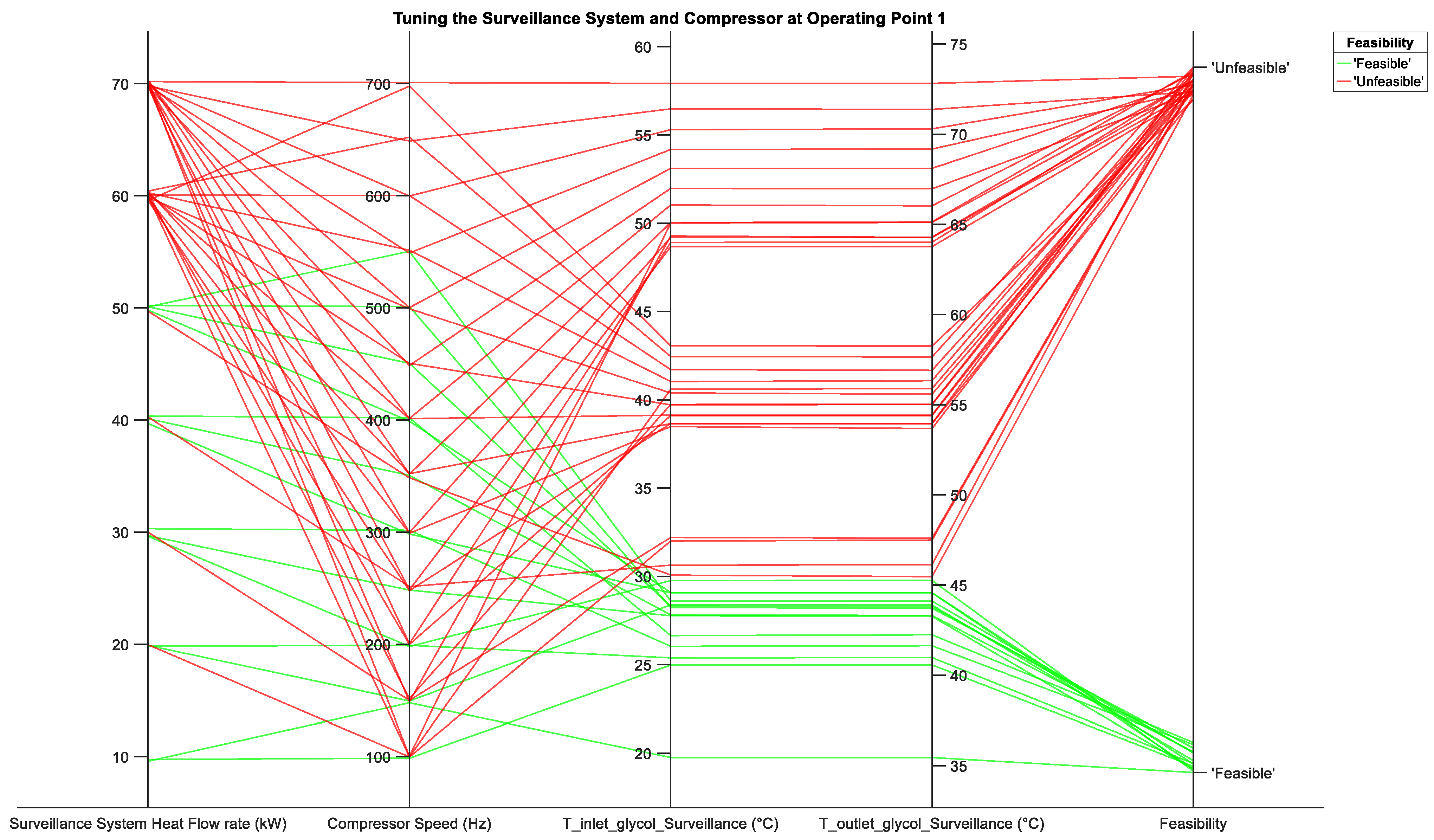
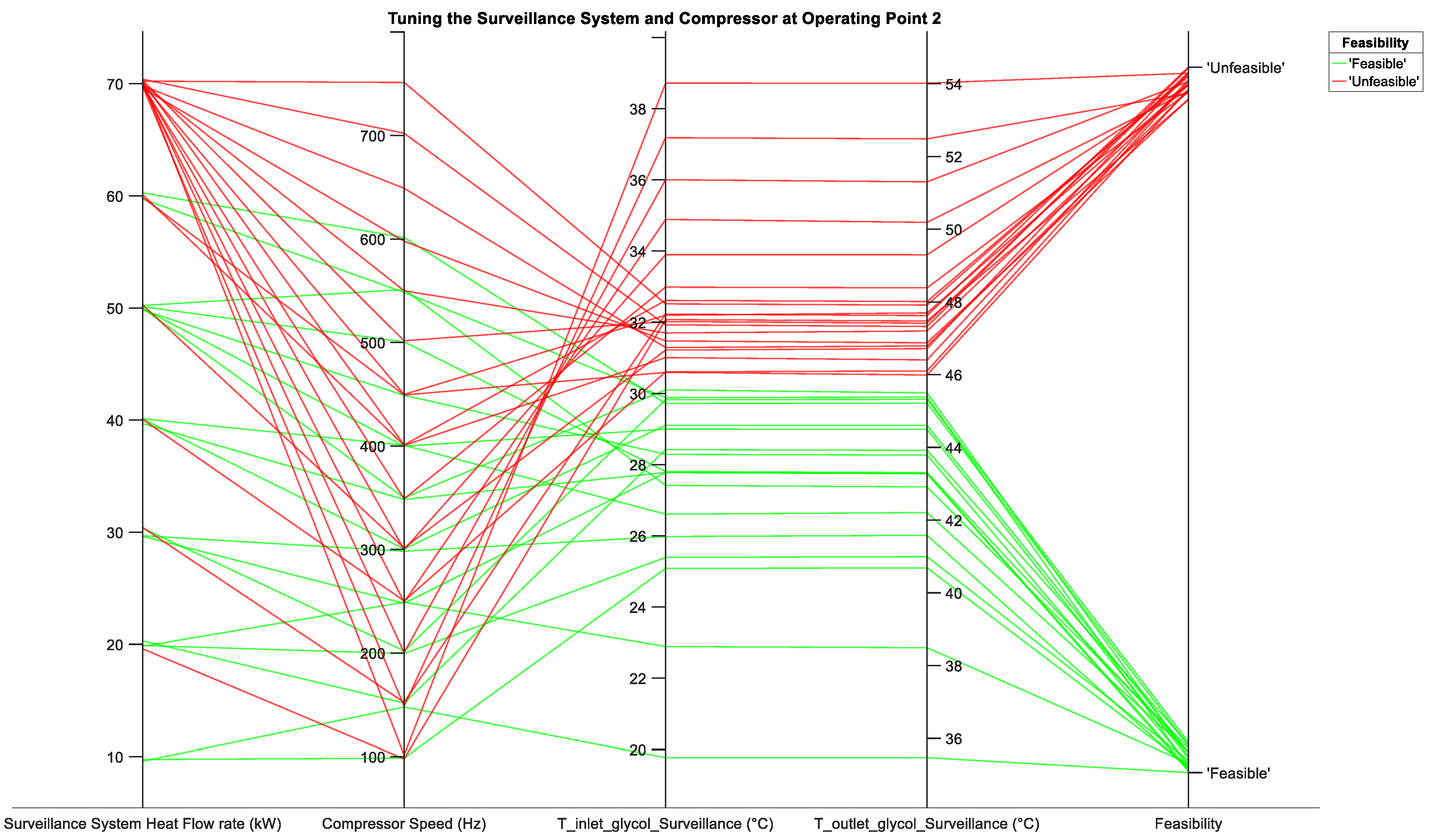
- Input Constraint 1: The first and foremost input constraint that the cooling system must fulfil is to ensure that the surveillance system is maintained within its safe operating temperature range. This means that the temperature of the ethylene glycol mixture at the inlet to the surveillance system must never exceed 30 °C and its temperature at the outlet of the system must never exceed 45 °C. The mass flow rate of the ethylene glycol mixture and the R134 refrigerant determine if this input constraint is met at each heat flow rate setting of the surveillance system from 10 kW to 70 kW. The mass flow rate of R134 and ethylene glycol is determined by the compressor speed and pump speed, respectively. To partly fulfil this constraint, ethylene glycol must be pumped at a specific mass flow rate for a given heat flow rate of the surveillance system, . The mass flow rate of ethylene glycol, is calculated using Equation (2):where is the temperature difference across the inlet and outlet of the surveillance system and is the specific heat capacity of ethylene glycol (50%).
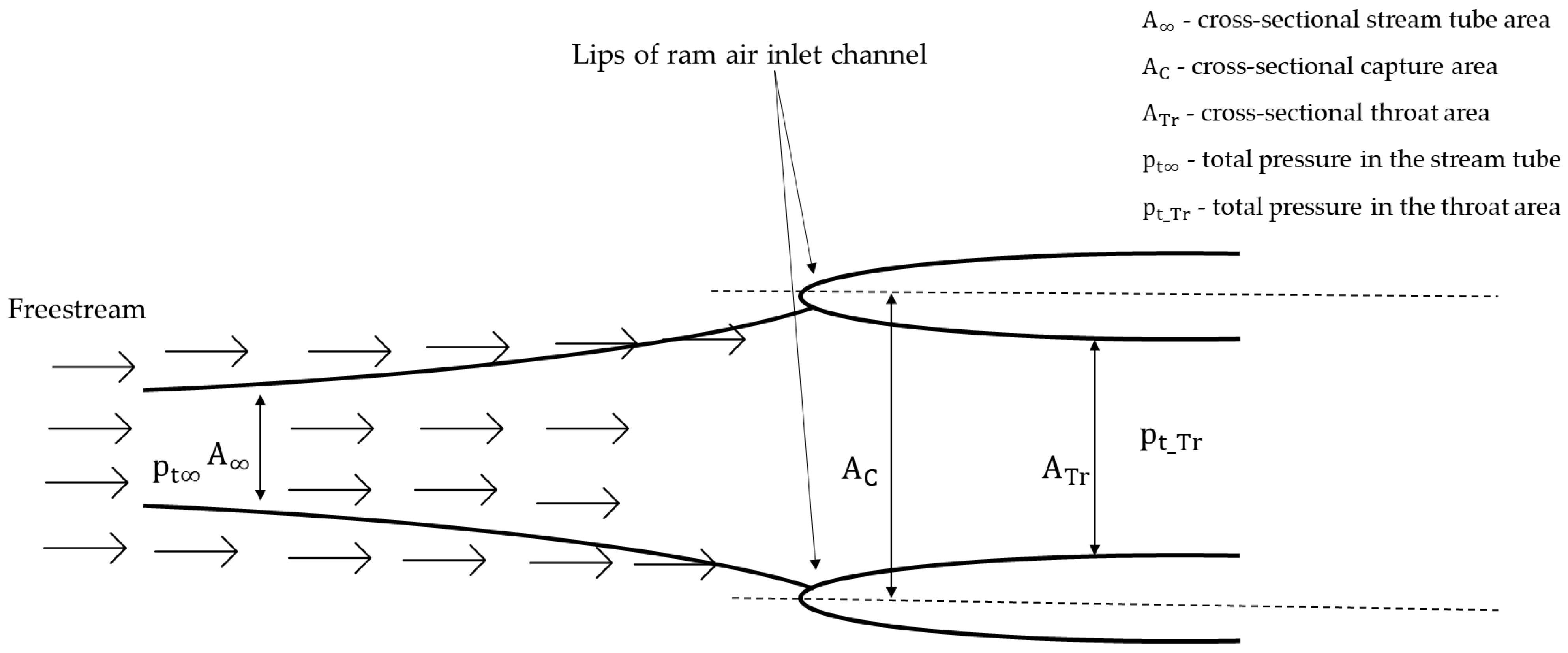
- Input Constraint 2: The second input constraint is set by the conditions at the inlet duct to the ram air heat exchanger. The duct is ram-pressure driven with no forced suction. Therefore, the total pressure in the stream tube, , is assumed to be the same as the total pressure in the throat area of the duct, . This results in lip losses having to be minimised. Therefore, the cross-sectional capture area at the inlet, must be greater than the cross-sectional capture area in the stream tube, . Areas and pressures in the stream tube and inlet are indicated in Figure 3. For a cross-sectional area of the throat, of 0.04 m2 and assuming thatthen, is 0.44 m2.
- ∘
- Operating point 1: ISA+15, = 0.6 kg/m3 and = 130 m/s
- ∘
- Operating point 2: ISA+15, = 0.37 kg/m3 and = 169 m/s
- Input Constraint 3: Retrofitting an existing aircraft with an additional cooling system leads to a very limited available volume for the components. The total available volume for the condenser and evaporator was limited to 0.15 m3. Using commercial off the shelf (COTS) options to fulfil this constraint, the dimensions of the condenser and evaporator are given in Table 3. The dimensions of the ram air heat exchanger are also based on a COTS option and are shown in Table 3.
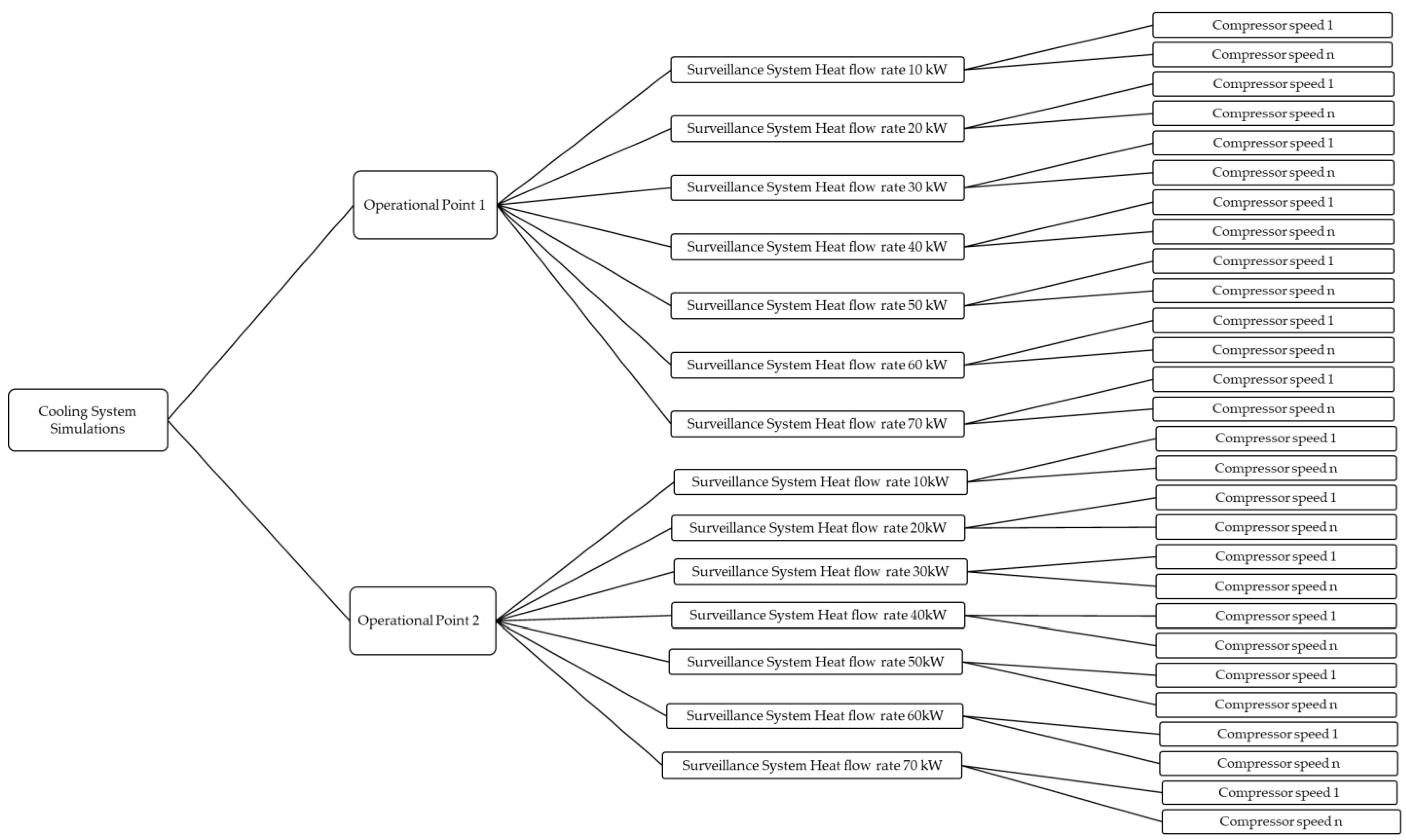
3.3. Tuning of Cooling System Parameters
3.4. Simulation Set-Up for Cooling System
4. Method Part 2: Modelling and Solving Strategy for the Cooling System
4.1. Physical Aspects of the Cooling System Model
4.1.1. Surveillance System Heat Flow Rate,
4.1.2. Ram Air Heat Exchanger
4.1.3. Ambient Conditions at the Aircraft Operating Points
4.1.4. Pump
4.1.5. Bypass Valve
4.1.6. Accumulator
4.1.7. Condenser and Evaporator
4.1.8. Compressor
- is obtained from empirical data for specified values of pressure ratio and . is computed according to Equation (10). is computed from the and specific enthalpy.
- relates the compression process to an isentropic compression, according to Equation (11). The specific enthalpy after isentropic compression () from to starting with is obtained from the refrigerant property model. is obtained from empirical data for specified values of , and . Then, can be obtained using Equation (11).
- Knowing , , , the required power, to compress the gas can be obtained using the energy balance of the compressor given by
- The real power consumption of a compressor is typically slightly higher than the value computed using Equation (12), and obtained from empirical data is used to characterize it. The losses captured in are the power provided to the compressor via the rotational shaft that does not reach the compressed gas due to internal friction and heat transfer from the gas to the solid parts of the compressor. Ultimately, it is transferred as heat to the surroundings. With look up tables for and already computed and , the compressor power consumption is computed using Equation (12) and the shaft torque, T given by
4.1.9. Thermostatic Valve
4.2. Cyber Aspects of the Cooling System Model
4.2.1. Control Strategy for the Compressor Speed
4.2.2. Control Strategy for the Thermostatic Valve
4.2.3. Control Strategy for the Bypass Valve
4.3. Solving the Model in Modelon Impact
- First the dynamic state variables are identified. The derivates of these can be solved from the DAE, and their time-dependent solution is obtained using numerical integration.
- The remaining equations of the DAE for a model are sorted such that for known values at every given time-step of parameters (i.e., constant values), boundary conditions (i.e., user-defined inputs) and dynamic state variables, all other model variables can be either explicitly computed with algebraic equations or obtained by solving linear or non-linear algebraic systems of equations.
5. Results and Discussion
5.1. Limits of the Cooling System
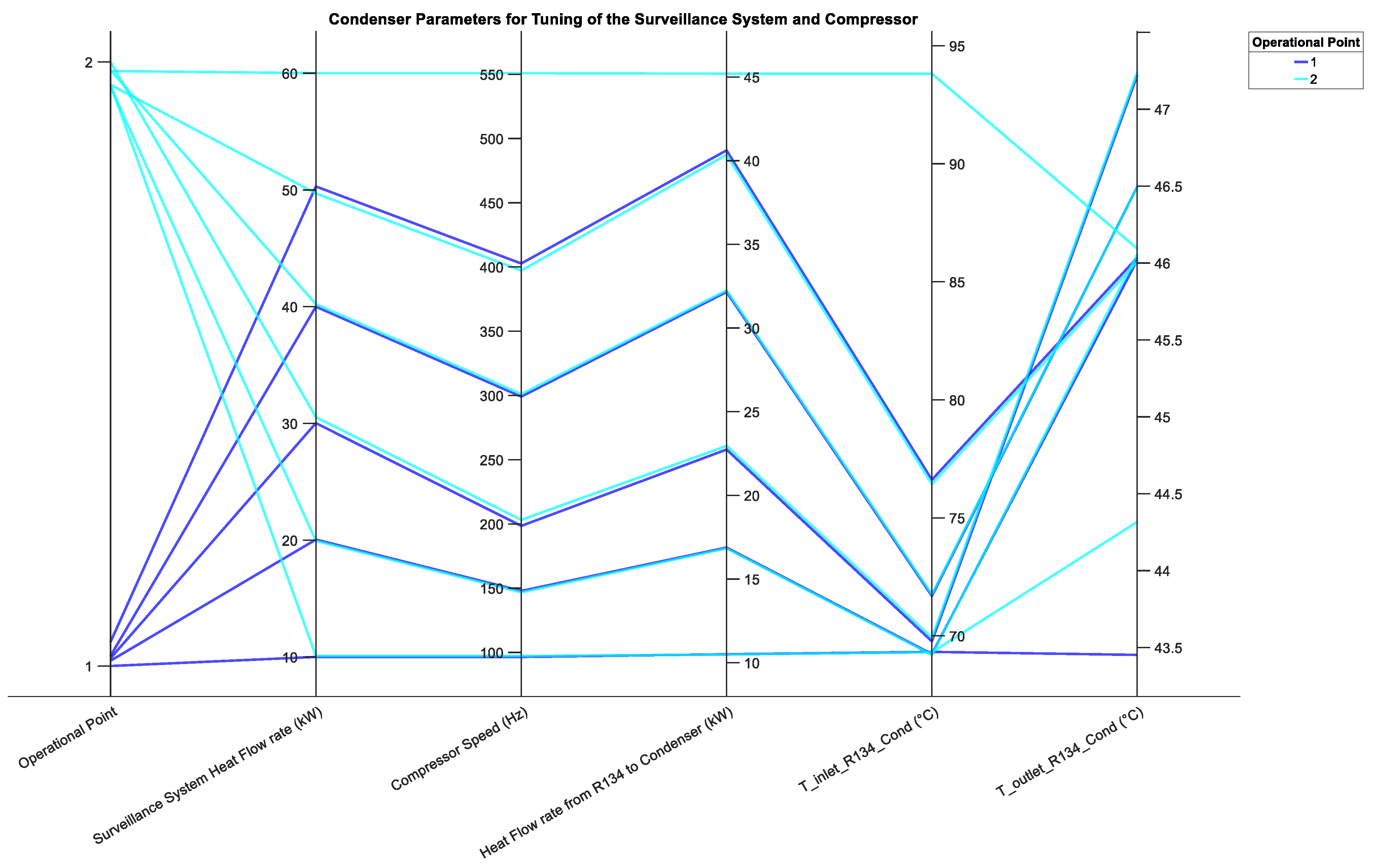
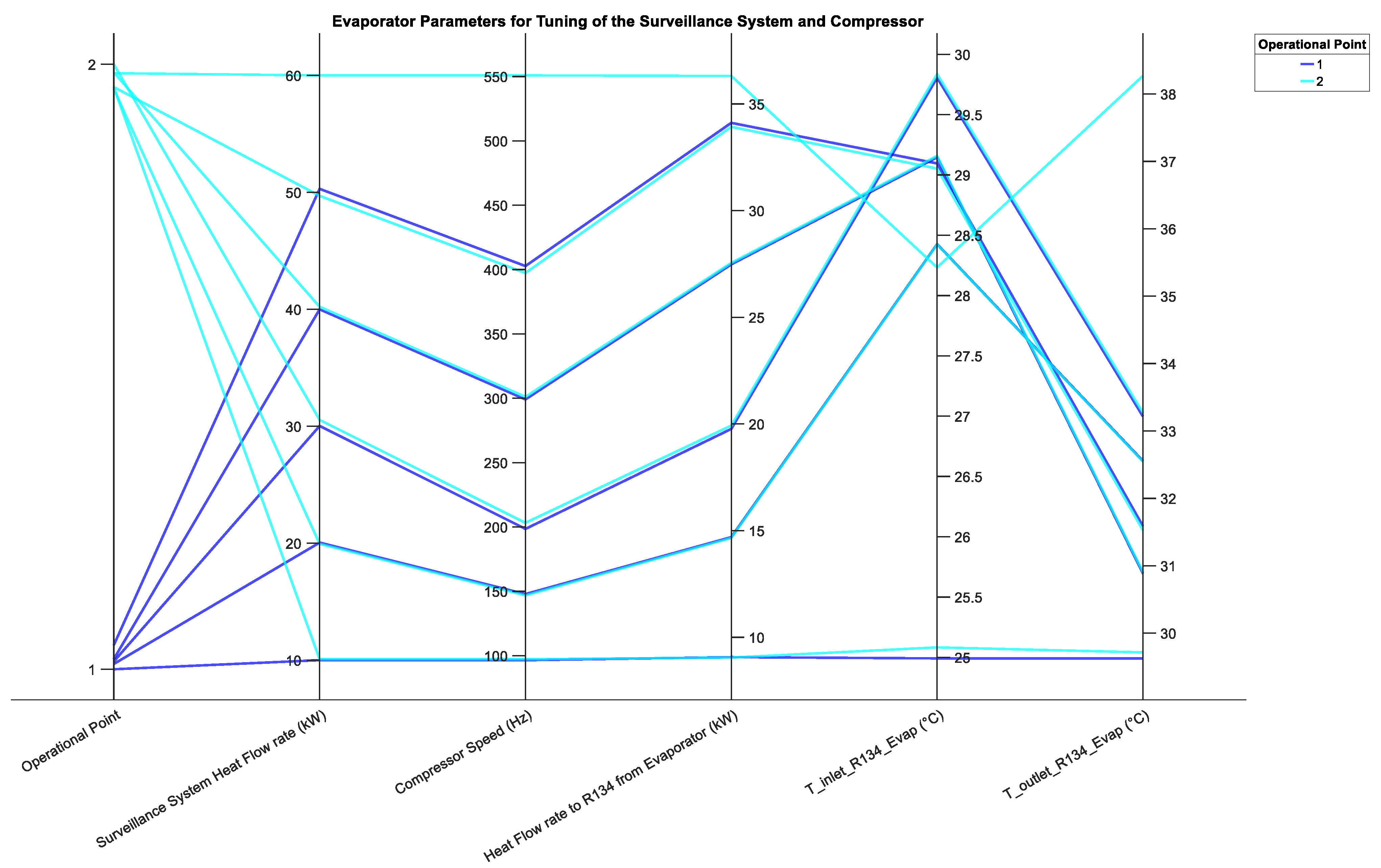
5.2. Performance of the Condenser and the Evaporator
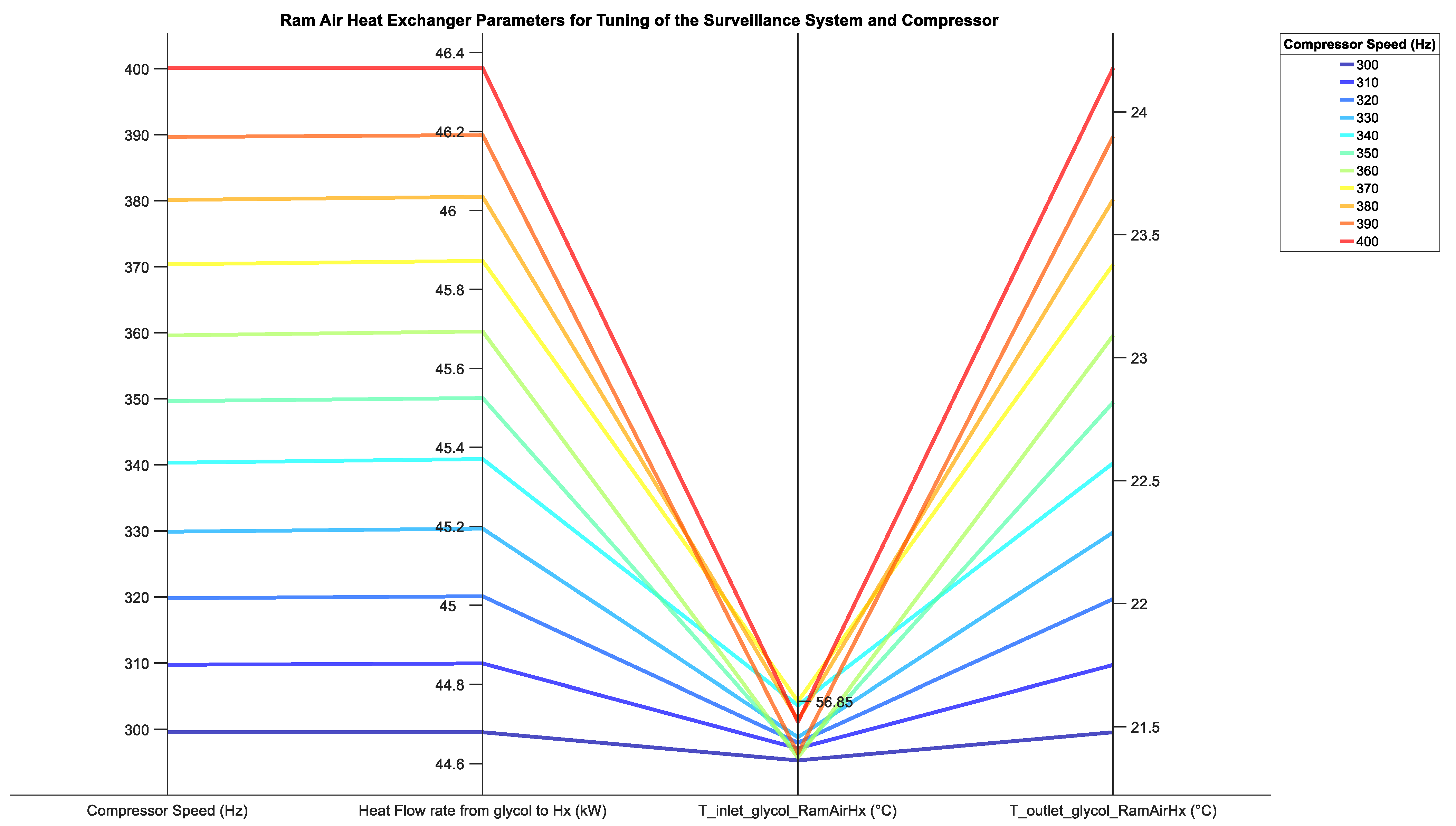
5.3. Performance of the Ram Air Heat Exchanger
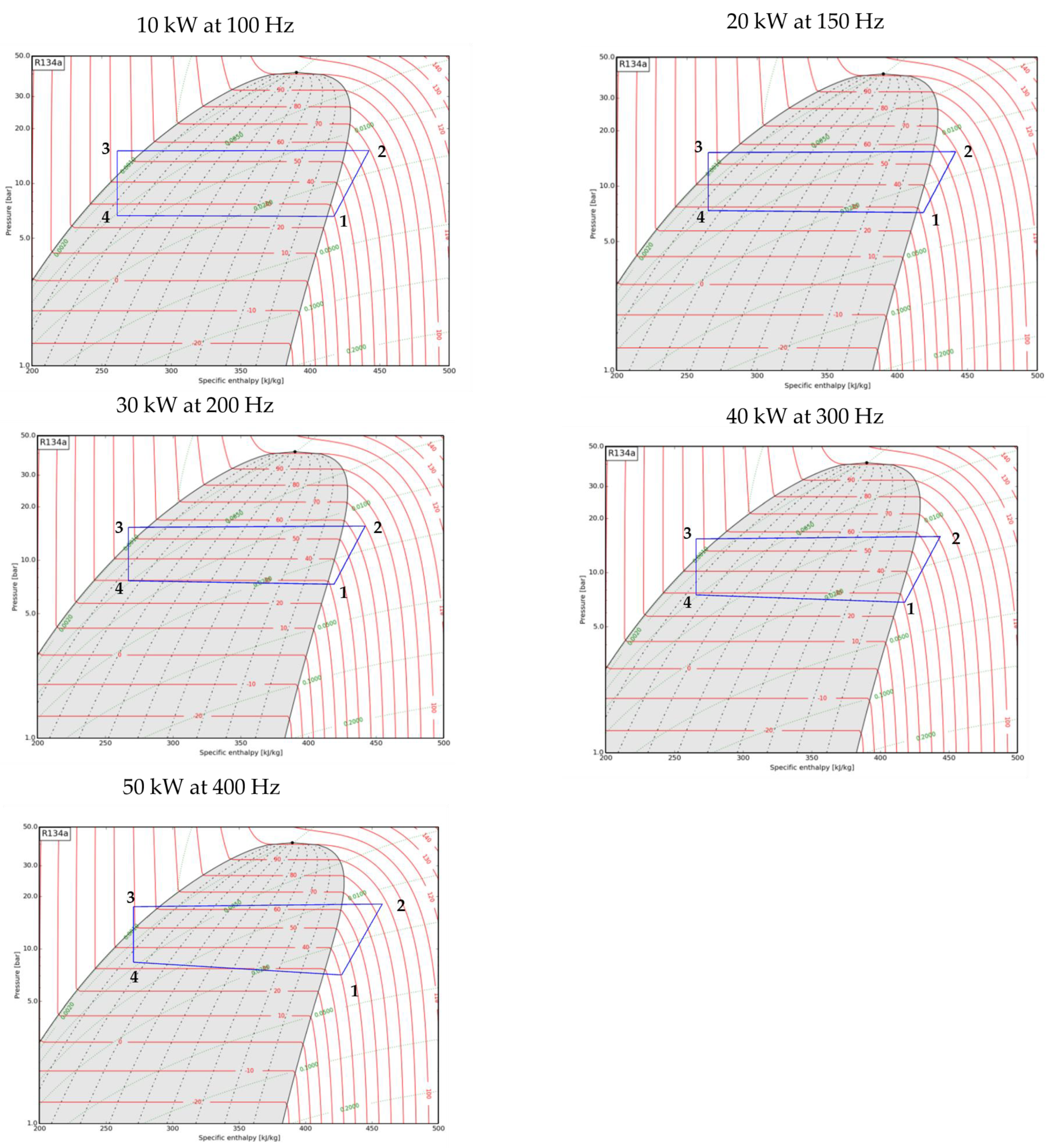
5.4. Performance of the Vapor Cycle System
6. Concluding Remarks
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Buss, L.B. “Electric Airplane” Environmental Control Systems Energy Requirements. In Proceedings of the IEEE Aerospace and Electronic Systems Society Fifth Annual Symposium, Dayton, OH, USA, 30 November 1983; Available online: https://ieeexplore-ieee-org.e.bibl.liu.se/document/4103938 (accessed on 29 December 2023).
- Scaringe, R.; Grzyll, L. The Heat Pump Thermal Bus—An Alternative to Pumped Coolant Loops. In Proceedings of the SAE International Aerospace Power Systems Conference, Mesa, AZ, USA, 6–8 April 1999; Available online: https://saemobilus.sae.org/content/1999-01-1356/#abstract (accessed on 2 October 2023).
- Ghanekar, M. Vapor Cycle System for the F-22 Raptor. In Proceedings of the SAE International 30th International Conference on Environment Systems, Toulouse, France, 10–13 July 2000; Available online: https://saemobilus.sae.org/content/2000-01-2268/#abstract (accessed on 2 October 2023).
- Delash, T. Vapor Cycle Compressor Range Expansion for Aerospace. In Proceedings of the SAE International Aerospace Technology Conference and Exposition, Chicago, IL, USA, 13–17 June 2011; Available online: https://saemobilus.sae.org/content/2011-01-2586/#abstract (accessed on 2 October 2023).
- Zhao, M.; Pang, L.; Liu, M.; Yu, S.; Mao, X. Control Strategy for Helicopter Thermal Management System Based on Liquid Cooling and Vapor Compression Refrigeration. Energies 2020, 13, 2177. Available online: https://www.mdpi.com/1996-1073/13/9/2177 (accessed on 2 October 2023). [CrossRef]
- Park, C.; Zuo, J.; Rogers, P.; Perez, J. Two-Phase Flow Cooling for Vehicle Thermal Management. In Proceedings of the SAE International World Congress & Exhibition, Detroit, MI, USA, 11–14 April 2005; Available online: https://saemobilus.sae.org/content/2005-01-1769/#abstract (accessed on 2 October 2023).
- Park, C.; Vallury, A.; Perez, J. Advanced Hybrid Cooling Loop Technology for High Performance Thermal Management. In Proceedings of the American Institute of Aeronautics and Astronautics 4th International Energy Conversion Engineering Conference, San Diego, CA, USA, 26–29 June 2006; Available online: https://apps.dtic.mil/sti/citations/ADA605483 (accessed on 2 October 2023).
- Byrd, L.; Cole, A.; Cranston, B.; Emo, S.; Ervin, J.; Michalak, T. Two Phase Thermal Energy Management. In Proceedings of the SAE International Aerospace Technology Conference and Exposition, Chicago, IL, USA, 13–17 June 2011; Available online: https://saemobilus.sae.org/content/2011-01-2584/#abstract (accessed on 2 October 2023).
- Byrd, L.; Cole, A.; Emo, S.; Ervin, J.; Michalak, T.; Tsao, V. In-situ Charge Determination for Vapor Cycle Systems in Aircraft. In Proceedings of the SAE International Power Systems Conference, Phoenix, AZ, USA, 30 October–1 November 2012; Available online: https://saemobilus.sae.org/content/2012-01-2187/#abstract (accessed on 2 October 2023).
- Miller, E.; Patnaik, S.; Jog, M. Dynamic Modeling of Vapor Compression Cycles Using a Novel Lagrangian Approach. In Proceedings of the American Society of Mechanical Engineers 2012 Summer Heat Transfer Conference, Rio Grande, PR, USA, 8–12 July 2012; Available online: https://asmedigitalcollection.asme.org/HT/proceedings/HT2012/44786/1023/245084 (accessed on 2 October 2023).
- Miller, E.; Patnaik, S.; Jog, M. System Dynamic Modeling of Vapor Compression Cycles. In Proceedings of the American Society of Mechanical Engineers 2012 International Mechanical Engineering Congress & Exposition, Houston, TX, USA, 9–15 November 2012; Available online: https://asmedigitalcollection.asme.org/IMECE/proceedings/IMECE2012/45172/27/259694 (accessed on 2 October 2023).
- Emo, S.; Ervin, J.; Michalak, T.; Tsao, V. Cycle-Based Vapor Cycle System Control and Active Charge Management for Dynamic Airborne Applications. In Proceedings of the SAE International Aerospace Systems and Technology Conference, Cincinnati, OH, USA, 23–25 September 2014; Available online: https://saemobilus.sae.org/content/2014-01-2224/#abstract (accessed on 2 October 2023).
- Homitz, J.; Scaringe, R.; Cole, G.; Fleming, A.; Michalak, T. Comparative Analysis of Thermal Management Architectures to Address Evolving Thermal Requirements of Aircraft Systems. In Proceedings of the SAE International Power Systems Conference, Bellevue, WA, USA, 11–13 November 2008; Available online: https://saemobilus.sae.org/content/2008-01-2905/#abstract (accessed on 2 October 2023).
- Sprouse, J. F-22 Environmental Control/Thermal Management System Design Optimization for Reliability and Integrity—A Case Study. In Proceedings of the SAE International 26th International Conference on Environmental Systems, Monterey, CA, USA, 8–11 July 1996; Available online: https://saemobilus.sae.org/content/961339/#abstract (accessed on 2 October 2023).
- Baird, D.; Ferentinos, J. Application of MIL-C-87252 in F-22 Liquid Cooling System. In Proceedings of the SAE International 28th International Conference on Environmental Systems, Danvers, MA, USA, 13–16 July 1998; Available online: https://saemobilus.sae.org/content/981543/#abstract (accessed on 2 October 2023).
- Ashford, R.; Brown, S. F-22 Environmental Control System/Thermal Management System (ECS/TMS) Flight Test Program—Downloadable Constants, an Innovative Approach. In Proceedings of the SAE International 30th International Conference on Environment Systems, Toulouse, France, 10–13 July 2000; Available online: https://saemobilus.sae.org/content/2000-01-2265/#abstract (accessed on 2 October 2023).
- Sprouse, J. F-22 Environmental Control/Thermal Management Fluid Transport Optimization. In Proceedings of the SAE International 30th International Conference on Environment Systems, Toulouse, France, 10–13 July 2000; Available online: https://saemobilus.sae.org/content/2000-01-2266/#abstract (accessed on 2 October 2023).
- Affonso, W., Jr.; Gadolfi, R.; Reis, R.J.; da Silva, C.; Rodio, N.; Kipouros, T.; Laskaridis, P.; Chekin, A.; Ravikovich, Y.; Ivanov, N.; et al. Thermal Management Challenges for HEA—FUTPRINT 50. In Proceedings of the IOP Conference Series: Material Science and Engineering, Sanya, China, 2–14 November 2021; Available online: https://iopscience.iop.org/article/10.1088/1757-899X/1024/1/012075 (accessed on 2 October 2023).
- van Heerden, A.S.J.; Judt, D.M.; Jafari, S.; Lawson, C.P.; Nikolaidis, T.; Bosak, D. Aircraft thermal management: Practices, technology, system architectures, future challenges, and opportunities. Prog. Aerosp. Sci. 2022, 128, 100767. Available online: https://www.sciencedirect.com/science/article/pii/S0376042121000701?via%3Dihub (accessed on 2 October 2023). [CrossRef]
- Pal, D.; Severson, M. Liquid cooled system for aircraft power electronics cooling. In Proceedings of the 16th IEEE Intersociety Conference on Thermal and Thermomechanical Phenomena in Electronic Systems (ITherm), Orlando, FL, USA, 30 May–2 June 2017; Available online: https://ieeexplore.ieee.org/document/7992568 (accessed on 2 October 2023).
- Michalak, T.; Emo, S.; Ervin, J. Control Strategy for Aircraft Vapor Compression System Operation. Int. J. Refrig. 2014, 48, 10–18. Available online: https://www.sciencedirect.com/science/article/pii/S0140700714002126 (accessed on 2 October 2023). [CrossRef]
- Ngo, A.D.; Cory, J.R.; Hencey, B.M.; Patnaik, S.S. A Simulink Pathway for Model-Based Control on Vapor Compression Cycles. In Proceedings of the American Society of Mechanical Engineers Dynamic Systems and Control Conference, Columbus, OH, USA, 28–30 October 2015; Available online: https://asmedigitalcollection.asme.org/DSCC/proceedings/DSCC2015/57243/V001T08A002/228025 (accessed on 2 October 2023).
- Ngo, A.D.; Cory, J.R. A Model Predictive Control Law for a Vapor Compression Cycle System. In Proceedings of the American Society of Mechanical Engineers Dynamic Systems and Control Conference, Minneapolis, MN, USA, 12–14 October 2016; Available online: https://fluidsengineering.asmedigitalcollection.asme.org/DSCC/proceedings/DSCC2016/50701/V002T27A003/231057 (accessed on 2 October 2023).
- Pollock, D.; Williams, M.; Hencey, B.M. Model Predictive Control of Temperature-Sensitive and Transient Loads in Aircraft Vapor Compression Systems. In Proceedings of the American Control Conference, Boston, MA, USA, 6–8 July 2016; Available online: https://ieeexplore.ieee.org/document/7524975 (accessed on 2 October 2023).
- Suh, N.P. Ergonomics, Axiomatic Design and Complexity Theory. Theor. Issues Ergon. Sci. 2007, 8, 101–121. Available online: https://www.tandfonline.com/doi/full/10.1080/14639220601092509 (accessed on 2 October 2023). [CrossRef]
- IBM Engineering Requirements Management. Available online: https://www.ibm.com/products/requirements-management (accessed on 29 December 2023).
- Kays, W.; London, A.L. Compact Heat Exchangers, 2nd ed.; McGraw Hill Inc.: New York, NY, USA, 1964; pp. 210–212. [Google Scholar]
- International Society of Automation-ISA75.01, Control Valve Sizing Equations. Available online: https://www.isa.org/products/ansi-isa-75-01-01-2012-60534-2-1-mod-industrial-pr (accessed on 2 October 2023).
- Firat, E.E.; Swallow, B.; Laramee, R.S. PCP-Ed: Parallel Coordinate Plots for Ensemble Data. Vis. Inform. 2023, 7, 56–65. Available online: https://www-sciencedirect-com.e.bibl.liu.se/science/article/pii/S2468502X22001085 (accessed on 29 December 2023). [CrossRef]
- Franzén, L.K.; Staack, I.; Krus, P.; Amadori, K. Optimization Framework for Early Conceptual Design of Helicopters. Aerospace 2022, 9, 598. Available online: https://www.mdpi.com/2226-4310/9/10/598 (accessed on 29 December 2023). [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Operating Point | Altitude (km) | Mach Number | TAMB (°C) | (°C) |
|---|---|---|---|---|
| 1 | 6.5 | 0.4 | −12 | −3 |
| 2 | 11 | 0.55 | −42 | −28 |
| (kW) | (kg/s) |
|---|---|
| 10 | 0.19 |
| 20 | 0.38 |
| 30 | 0.57 |
| 40 | 0.76 |
| 50 | 0.95 |
| 60 | 1.14 |
| 70 | 1.33 |
| Heat Exchanger | Height (m) | Width (m) | Length (m) | |
|---|---|---|---|---|
| Condenser | 0.3 | 0.3 | 0.8 | 0.072 |
| Evaporator | 0.3 | 0.3 | 0.8 | 0.072 |
| Ram Air Heat Exchanger | 0.35 | 0.35 | 0.1 | 0.012 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Drego, A.D.; Andersson, D.; Staack, I. Parameter Tuning of a Vapor Cycle System for a Surveillance Aircraft. Aerospace 2024, 11, 66. https://doi.org/10.3390/aerospace11010066
Drego AD, Andersson D, Staack I. Parameter Tuning of a Vapor Cycle System for a Surveillance Aircraft. Aerospace. 2024; 11(1):66. https://doi.org/10.3390/aerospace11010066
Chicago/Turabian StyleDrego, Adelia Darlene, Daniel Andersson, and Ingo Staack. 2024. "Parameter Tuning of a Vapor Cycle System for a Surveillance Aircraft" Aerospace 11, no. 1: 66. https://doi.org/10.3390/aerospace11010066
APA StyleDrego, A. D., Andersson, D., & Staack, I. (2024). Parameter Tuning of a Vapor Cycle System for a Surveillance Aircraft. Aerospace, 11(1), 66. https://doi.org/10.3390/aerospace11010066