
Risk Assessment Method for UAV’s Sense and Avoid System Based on Multi-Parameter Quantification and Monte Carlo Simulation


Abstract
:1. Introduction
2. Sense and Avoid System for UAV
2.1. Components/Elements
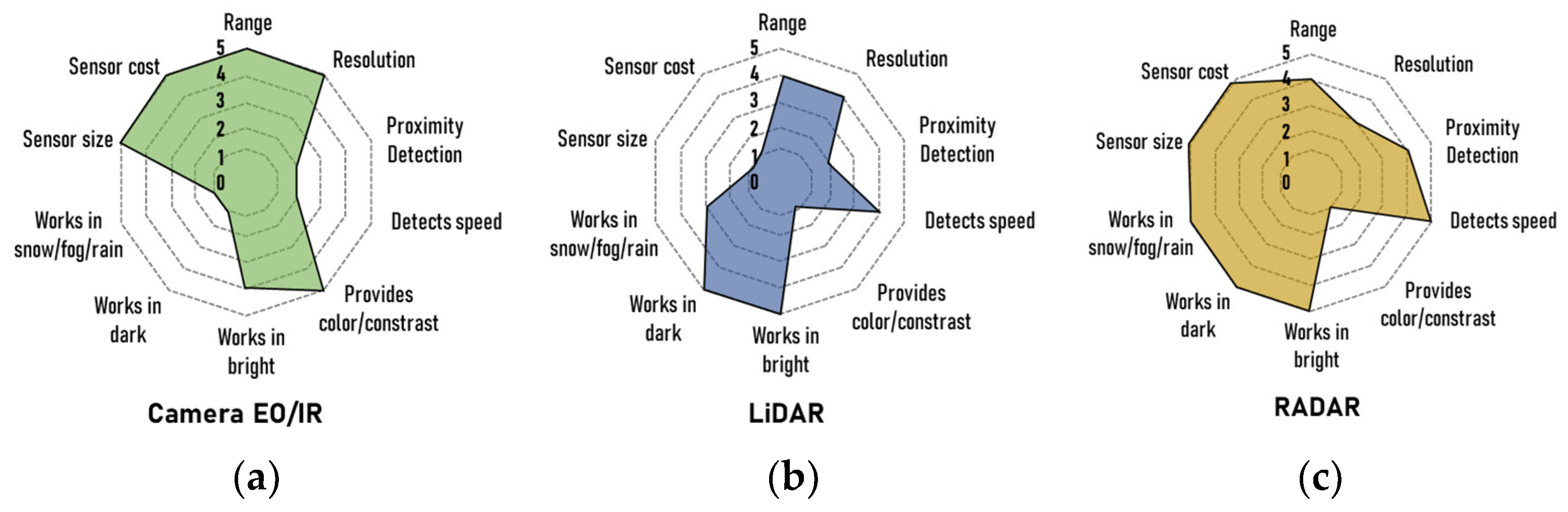
2.1.1. Sensing Technology
2.1.2. Avoidance Technology
2.2. Category of Sense and Avoid System
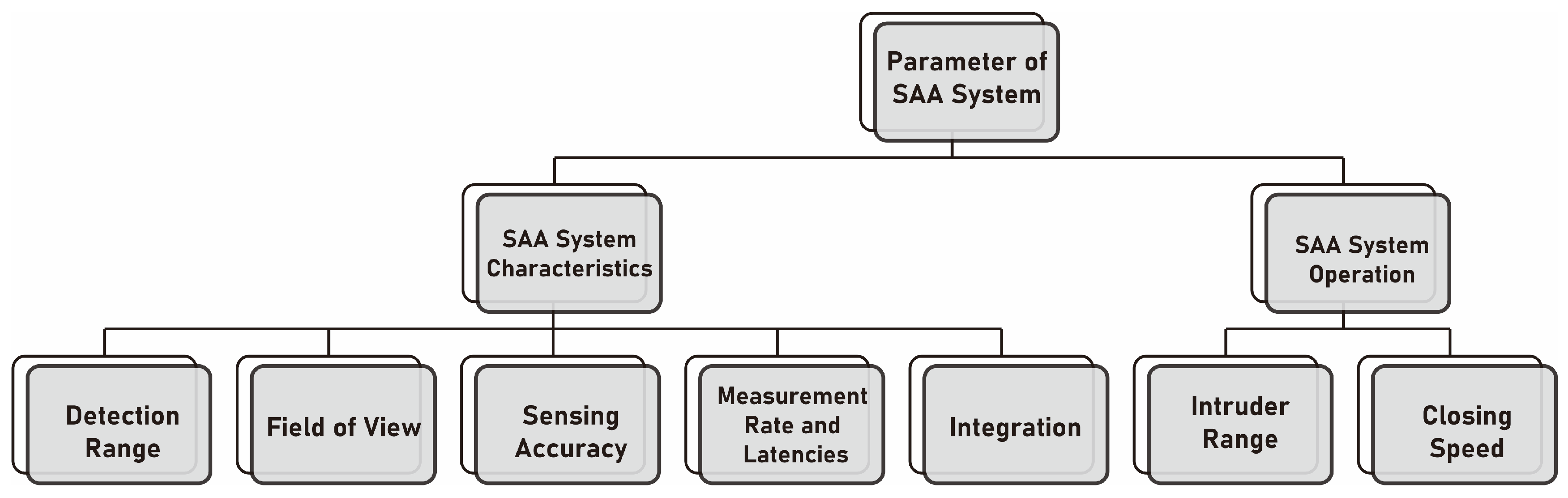
2.3. General Parameters of the Sense and Avoid System
3. SAA Multi-Parameter Quantification
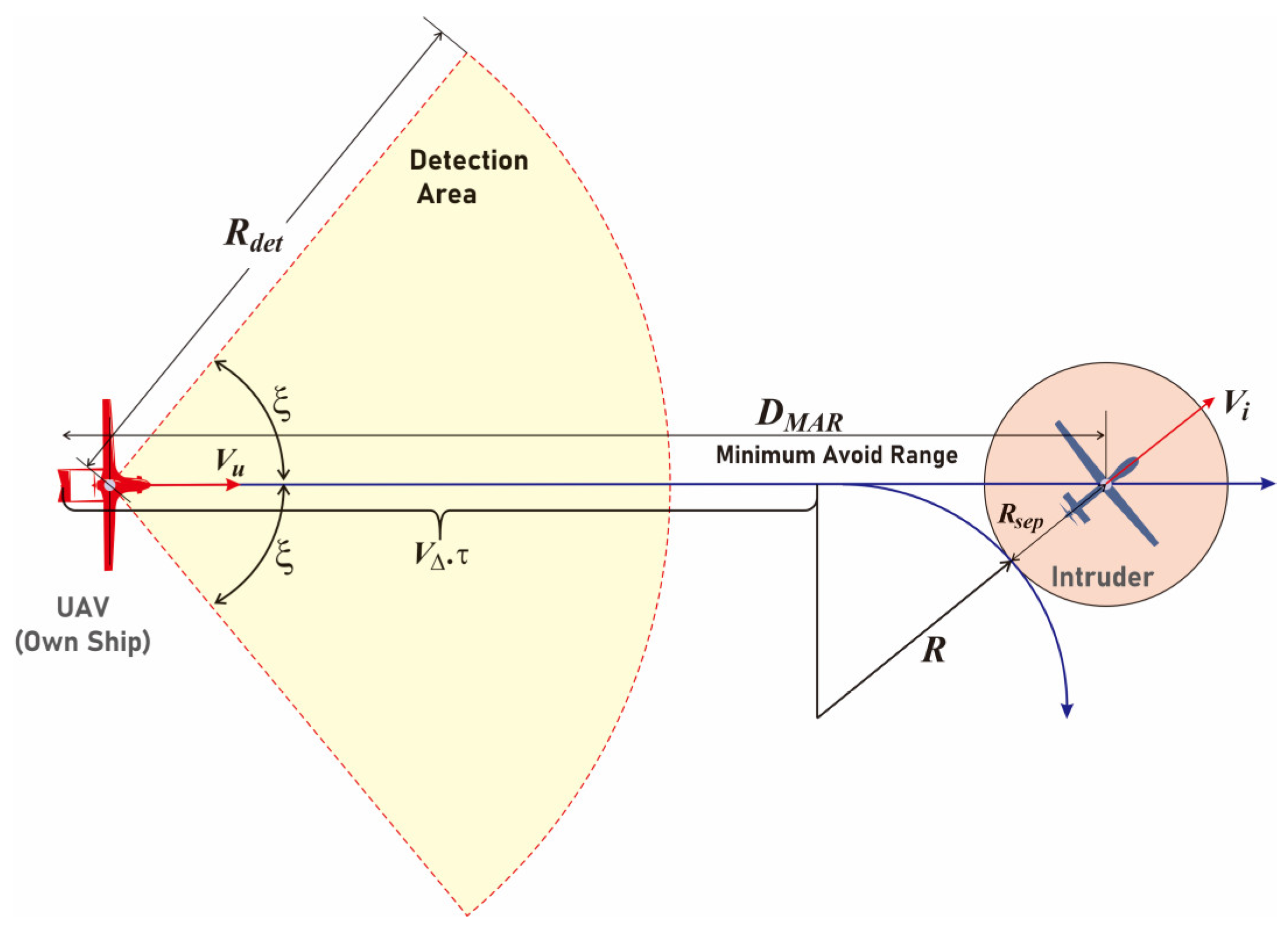
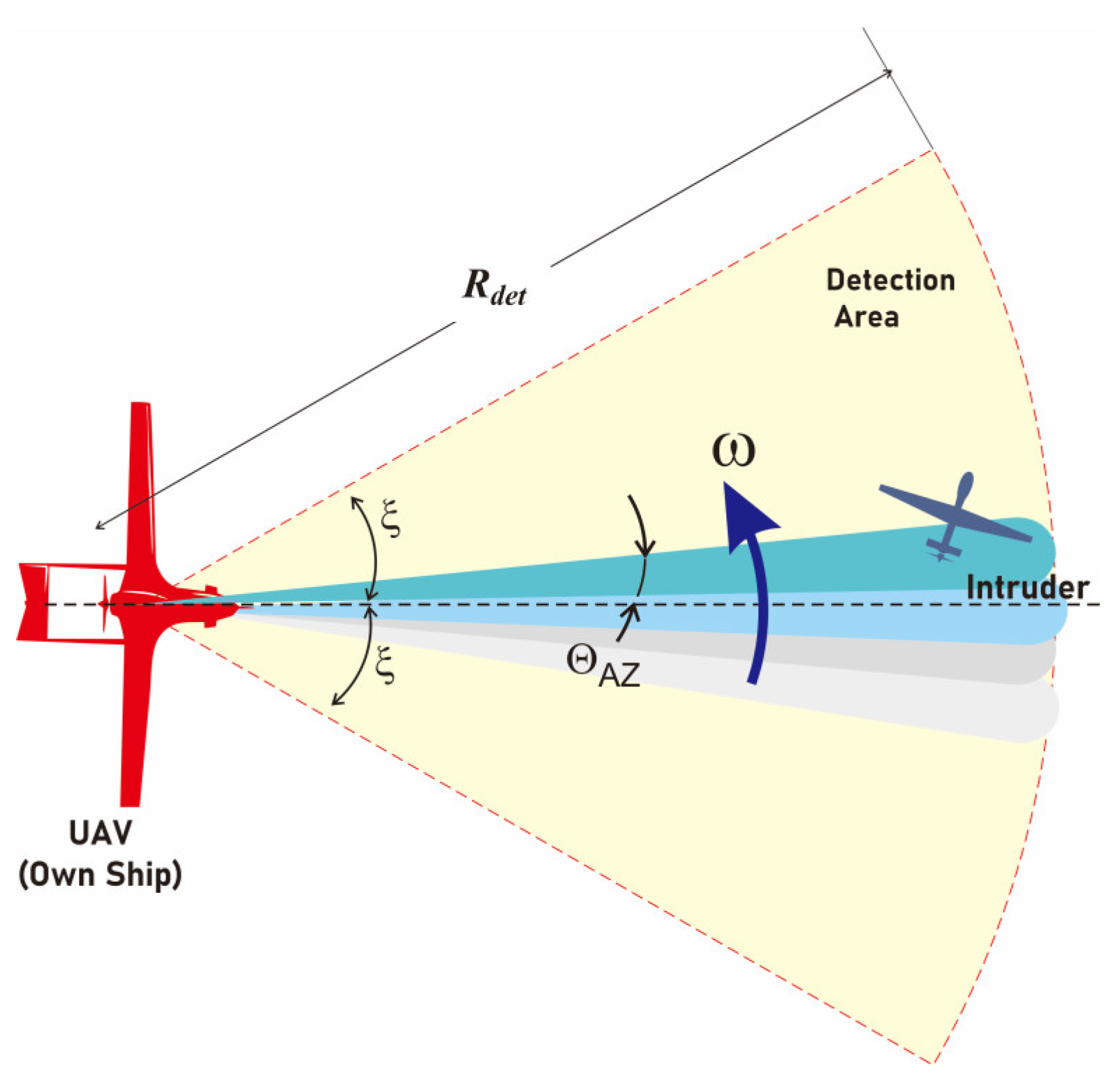
3.1. Detection Range (DR)
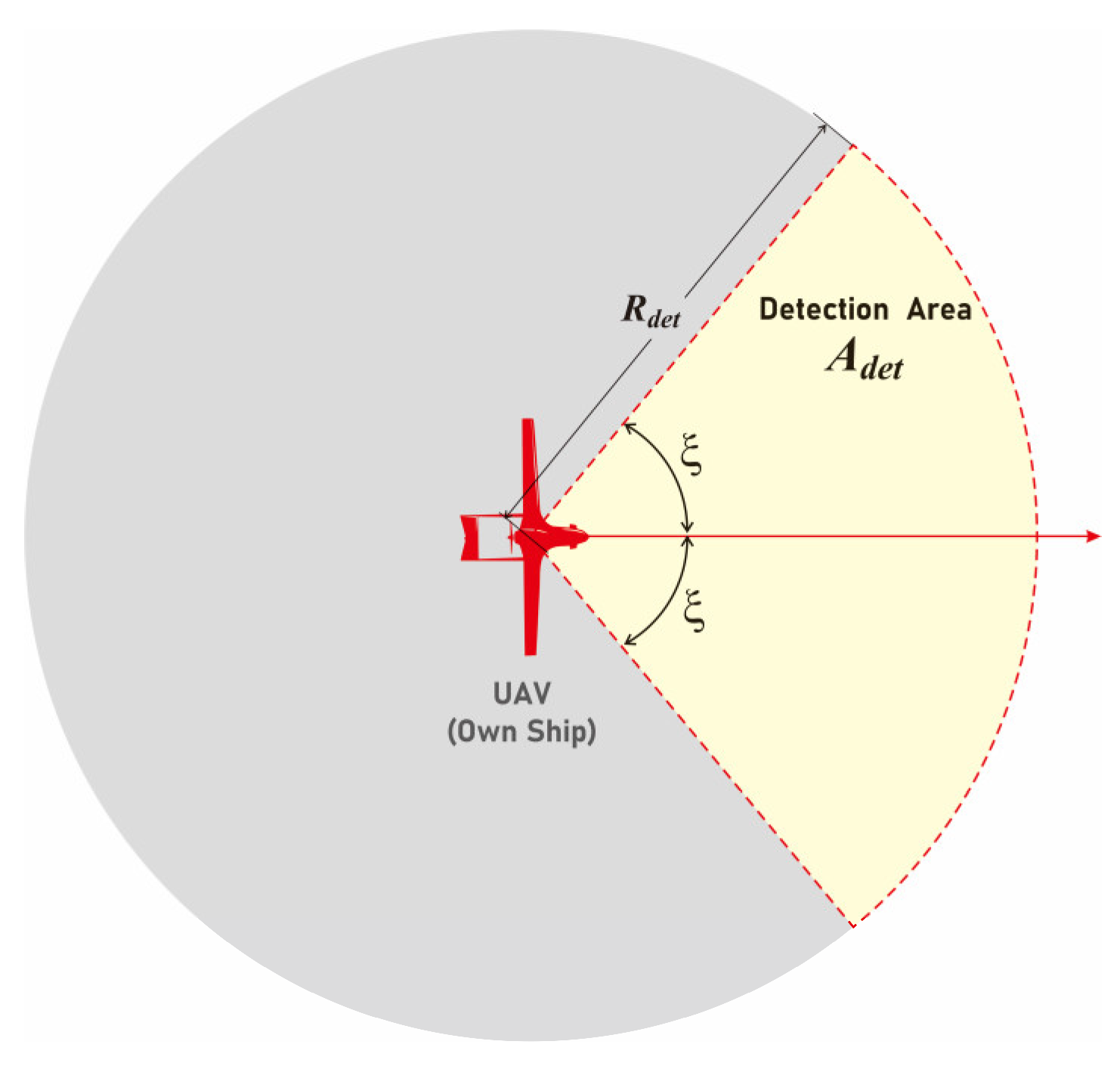
3.2. Field of View (FOV)
3.3. Sensor Accuracy (SA)
3.4. Measurement Rate (MR)
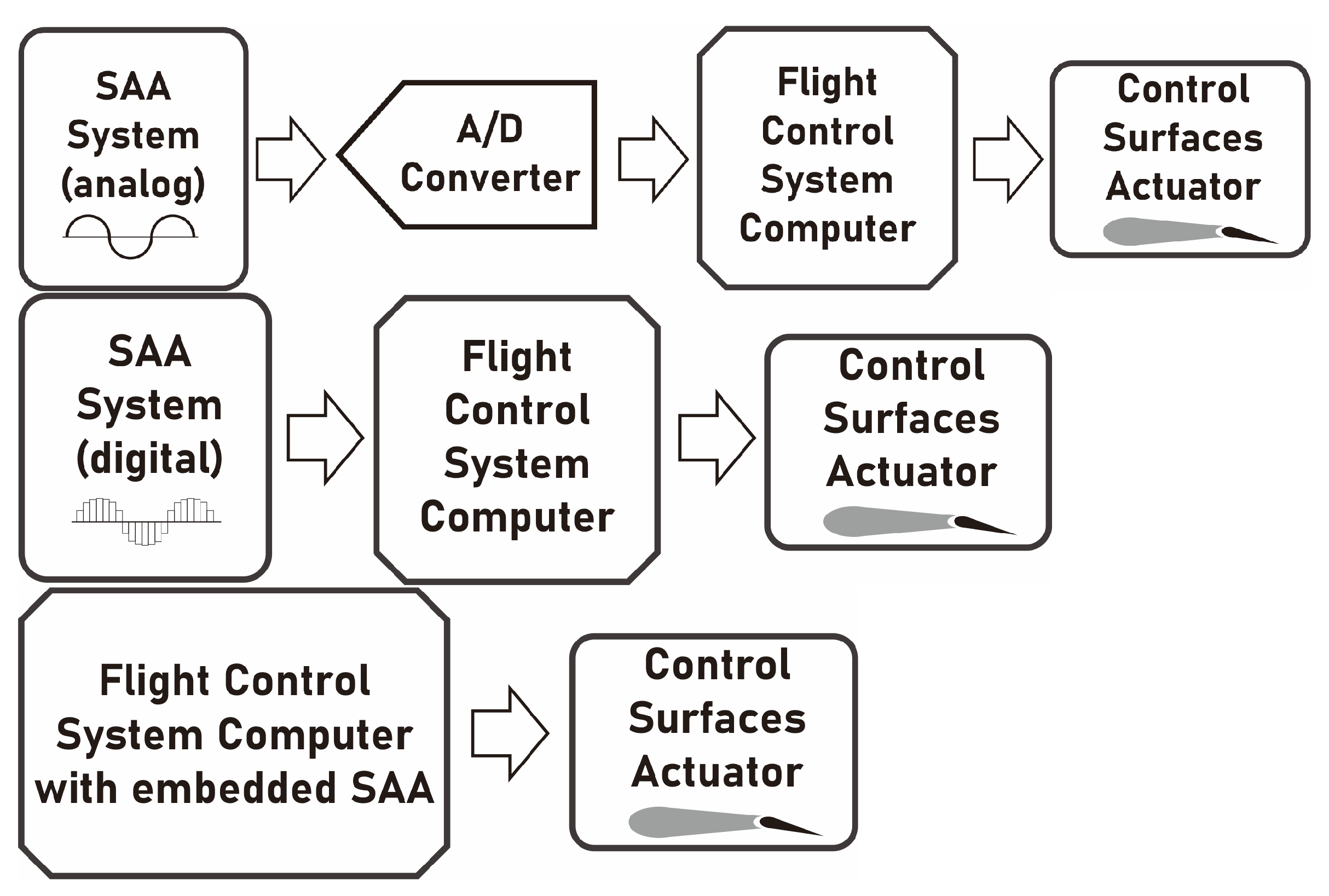
3.5. System Integration (SI)
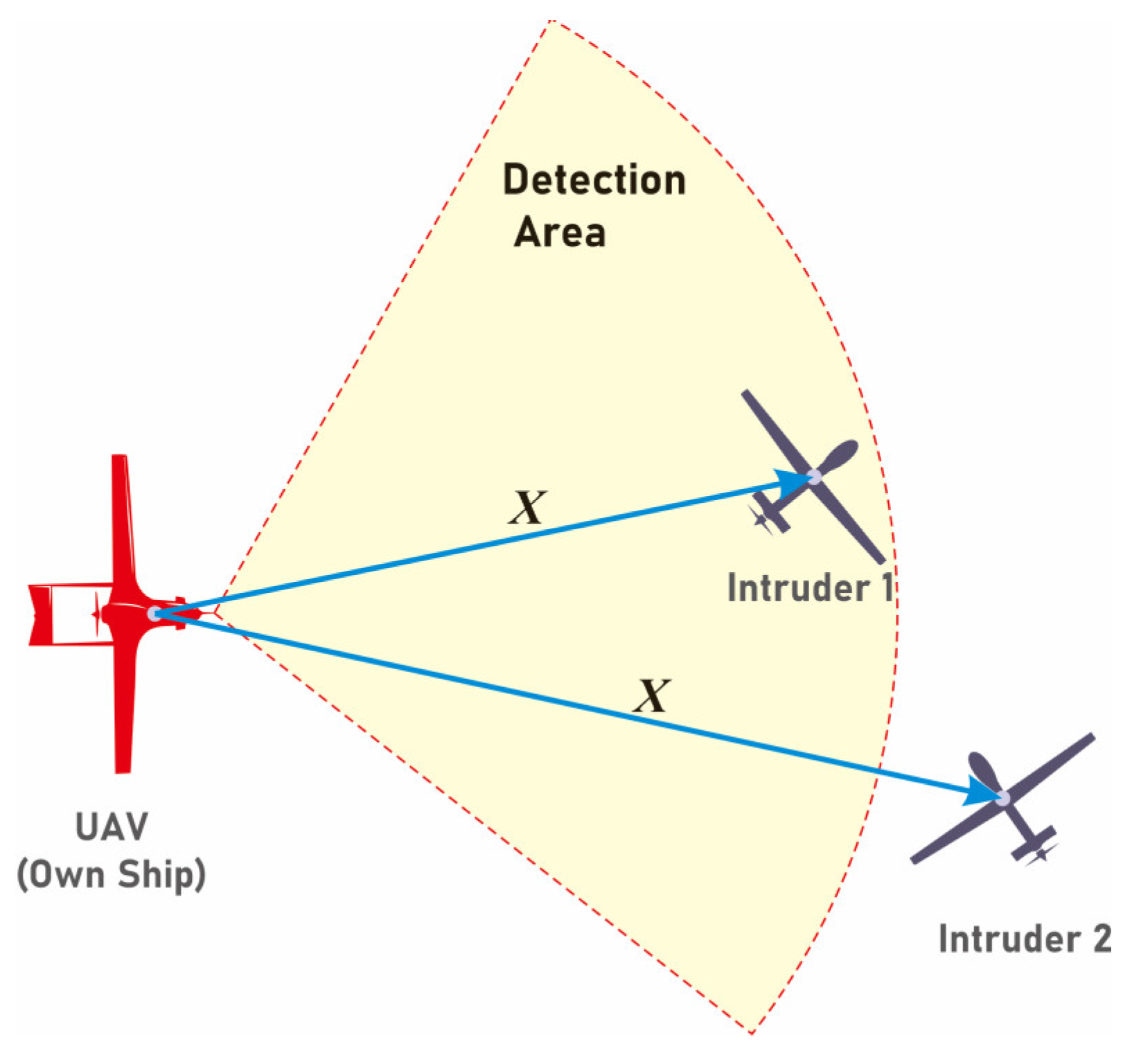
3.6. Range of Intruder (RI)
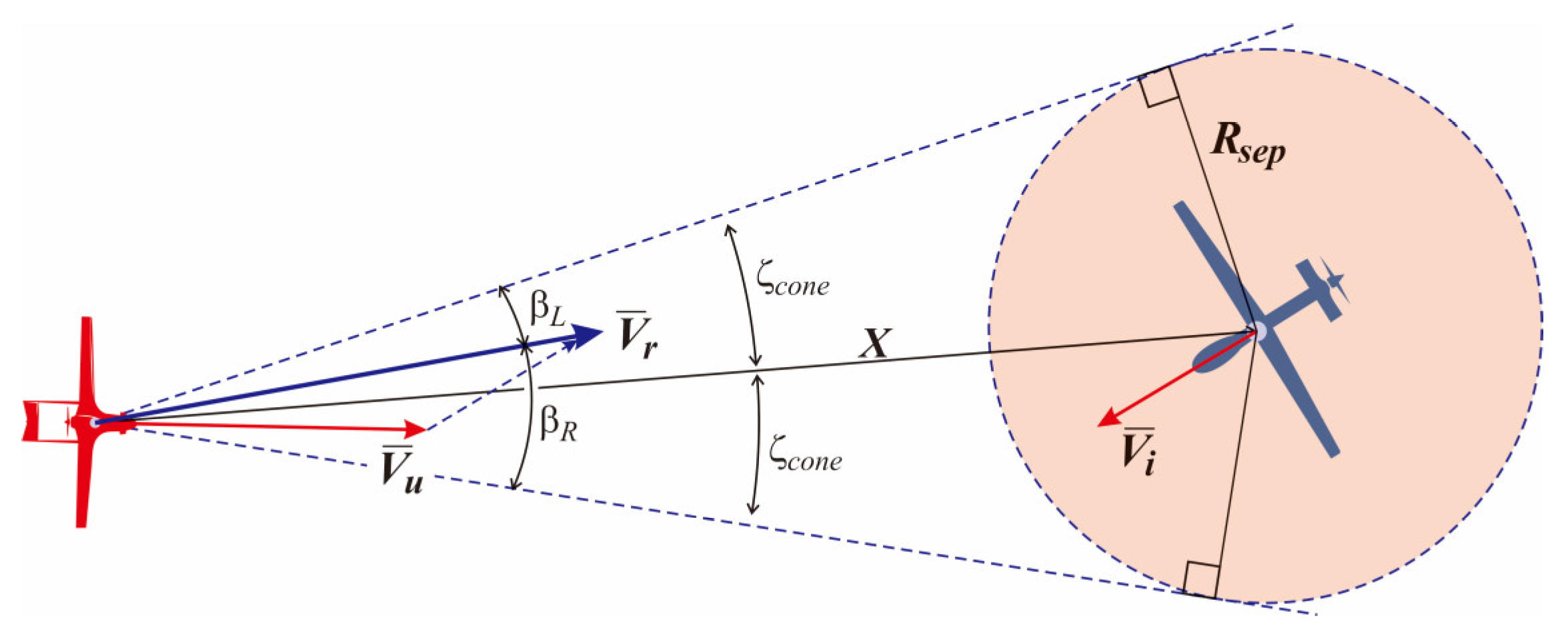
3.7. Closing Speed (CS)
4. Risk Rating Assessment Simulator
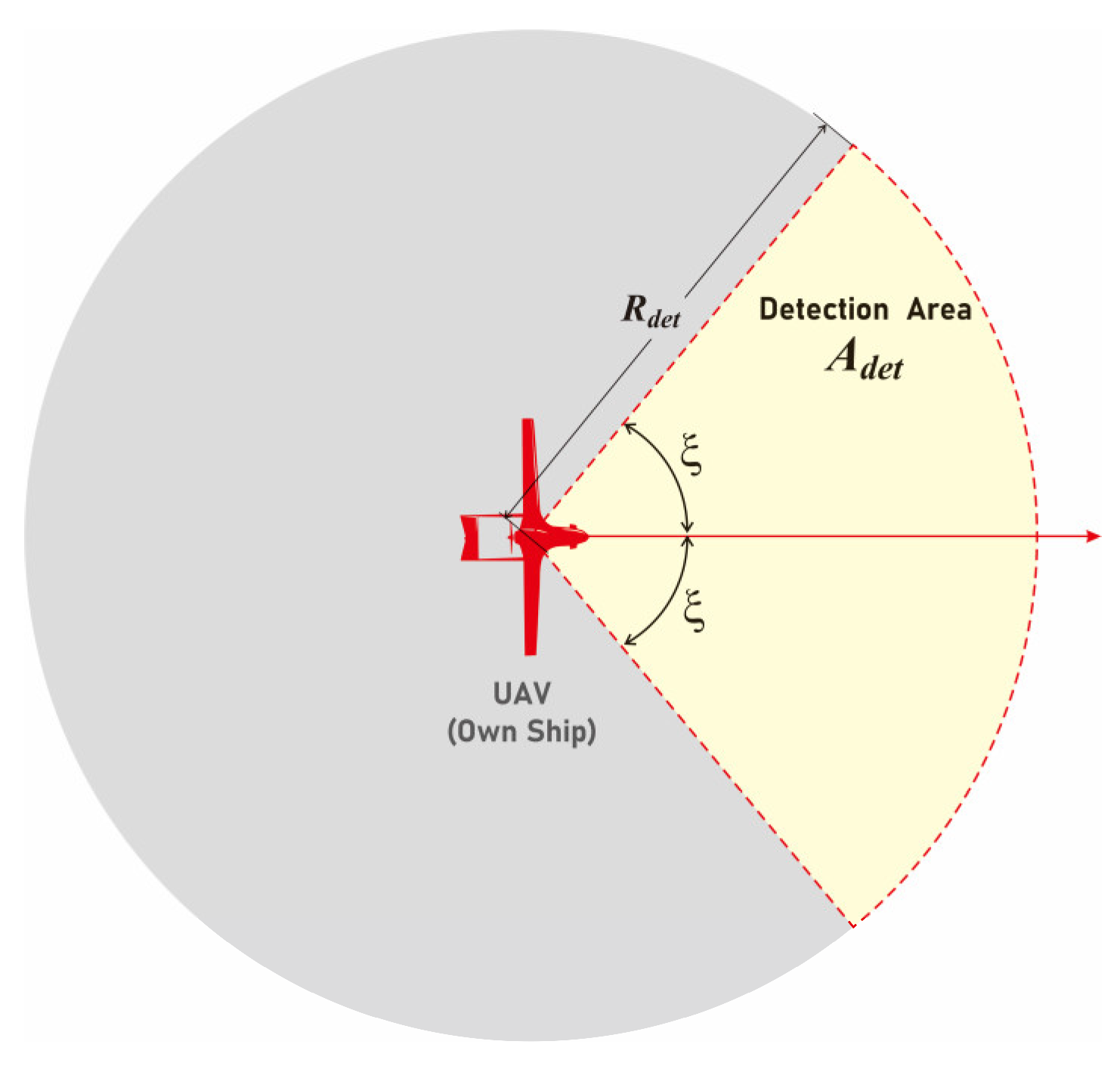
4.1. Area of Observation
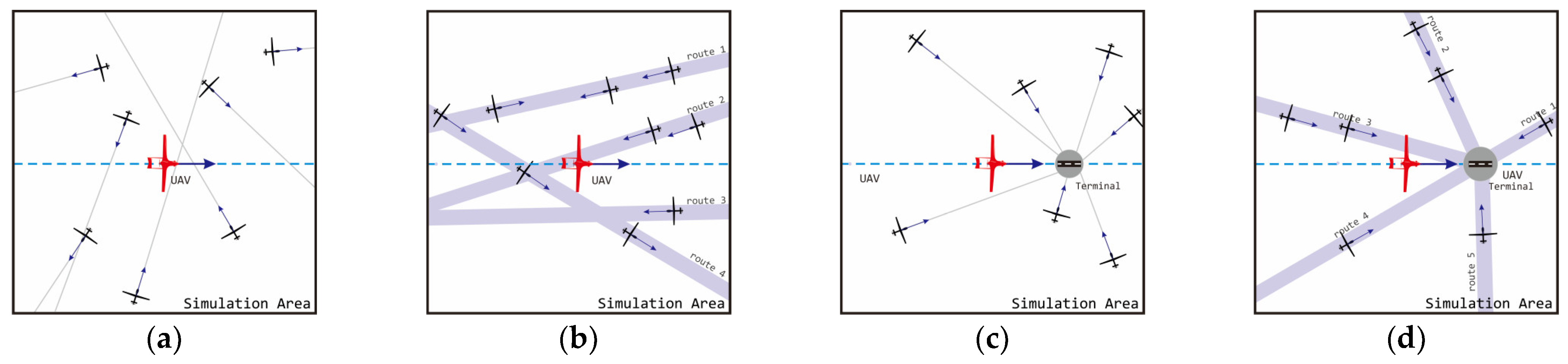
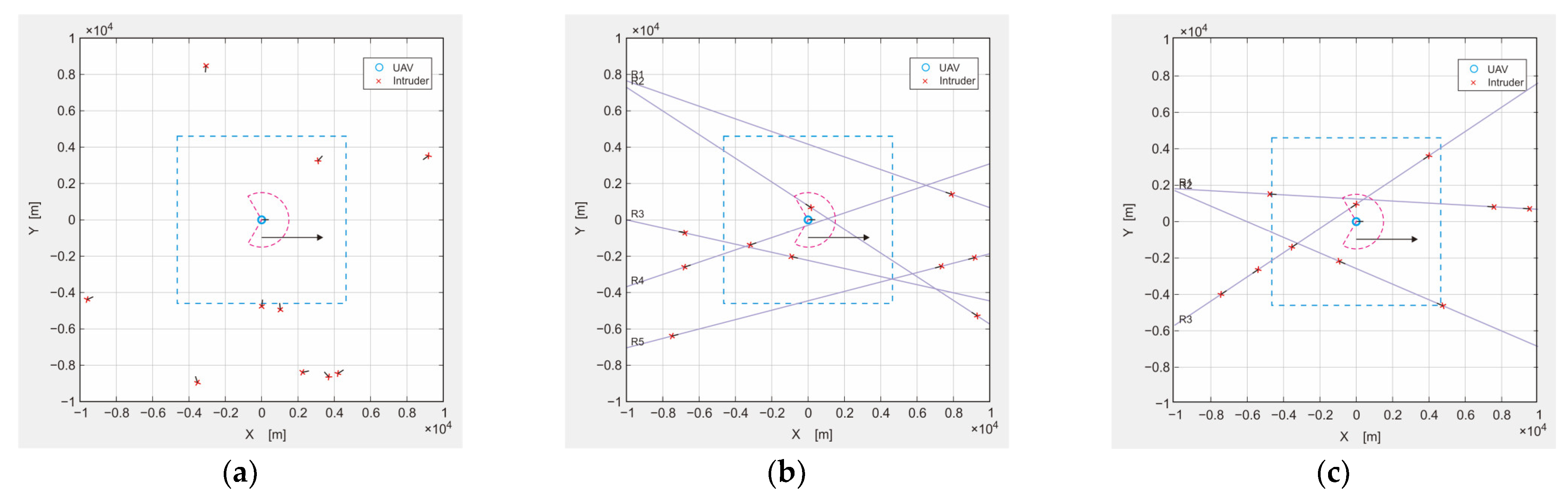
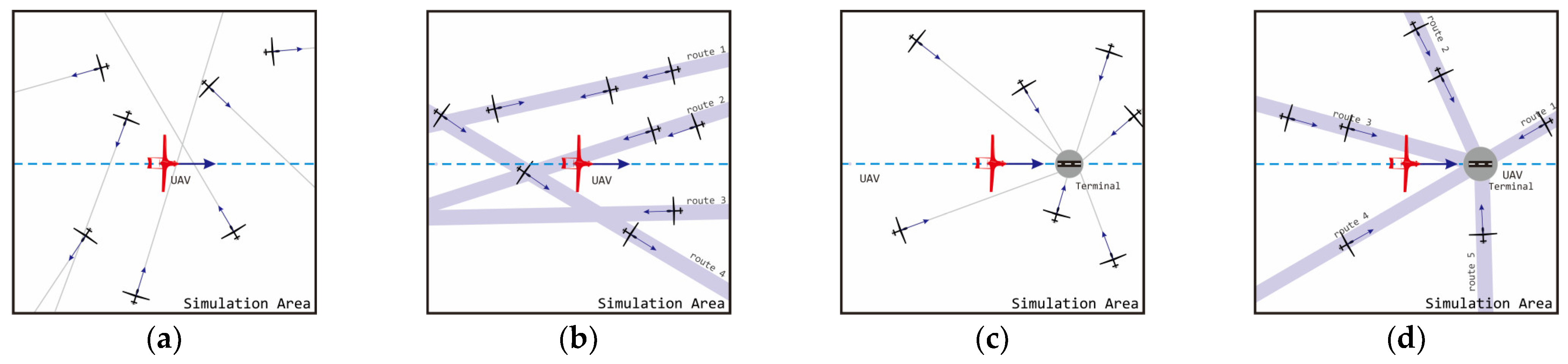
4.2. Initial Positions and Air Routes
- Random points, where a certain number of intruders are positioned randomly; each is given constant but random headings. The range of headings is limited to the opposite quadrant of the initial position to avoid the intruder’s immediate leave.
- Random within routes, where a certain number of routes with random headings are generated before placing intruders around them. The routes are maintained close to the UAV. Each intruder heading, therefore, follows the heading of the routes.
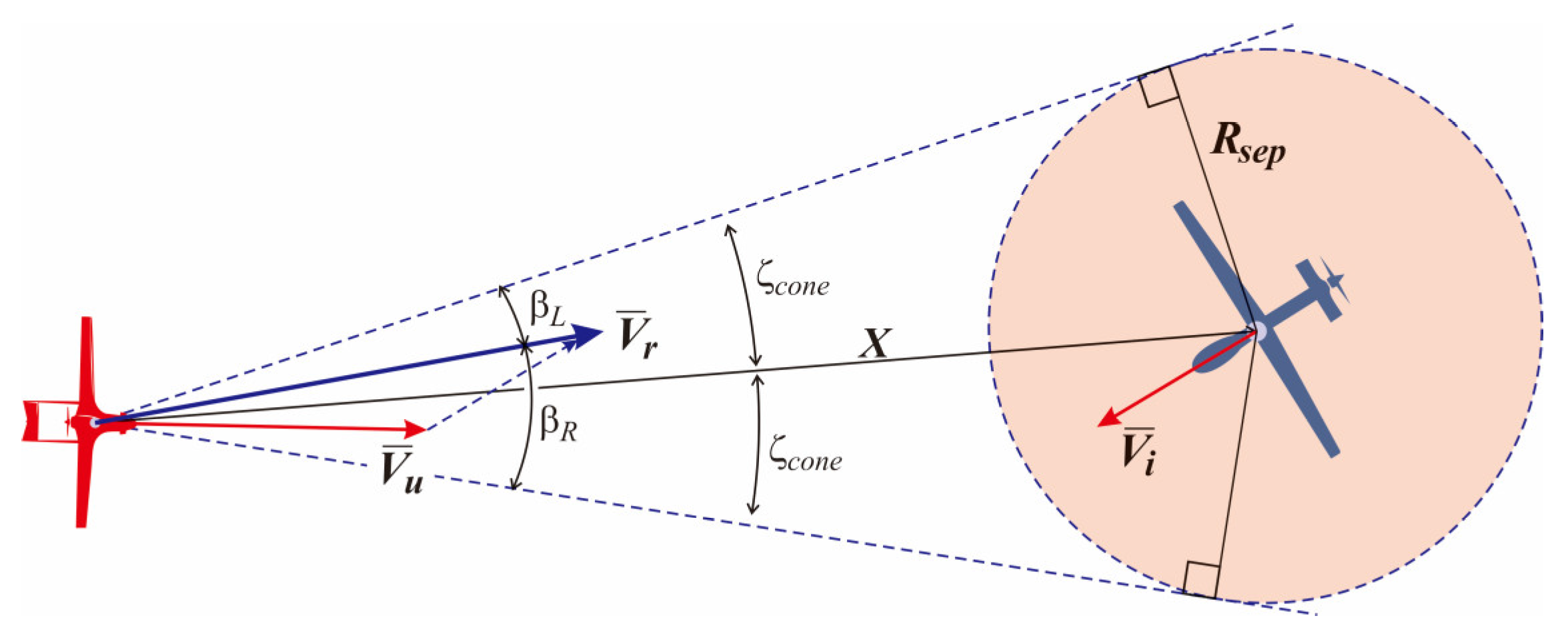
4.3. Vehicle Kinematics
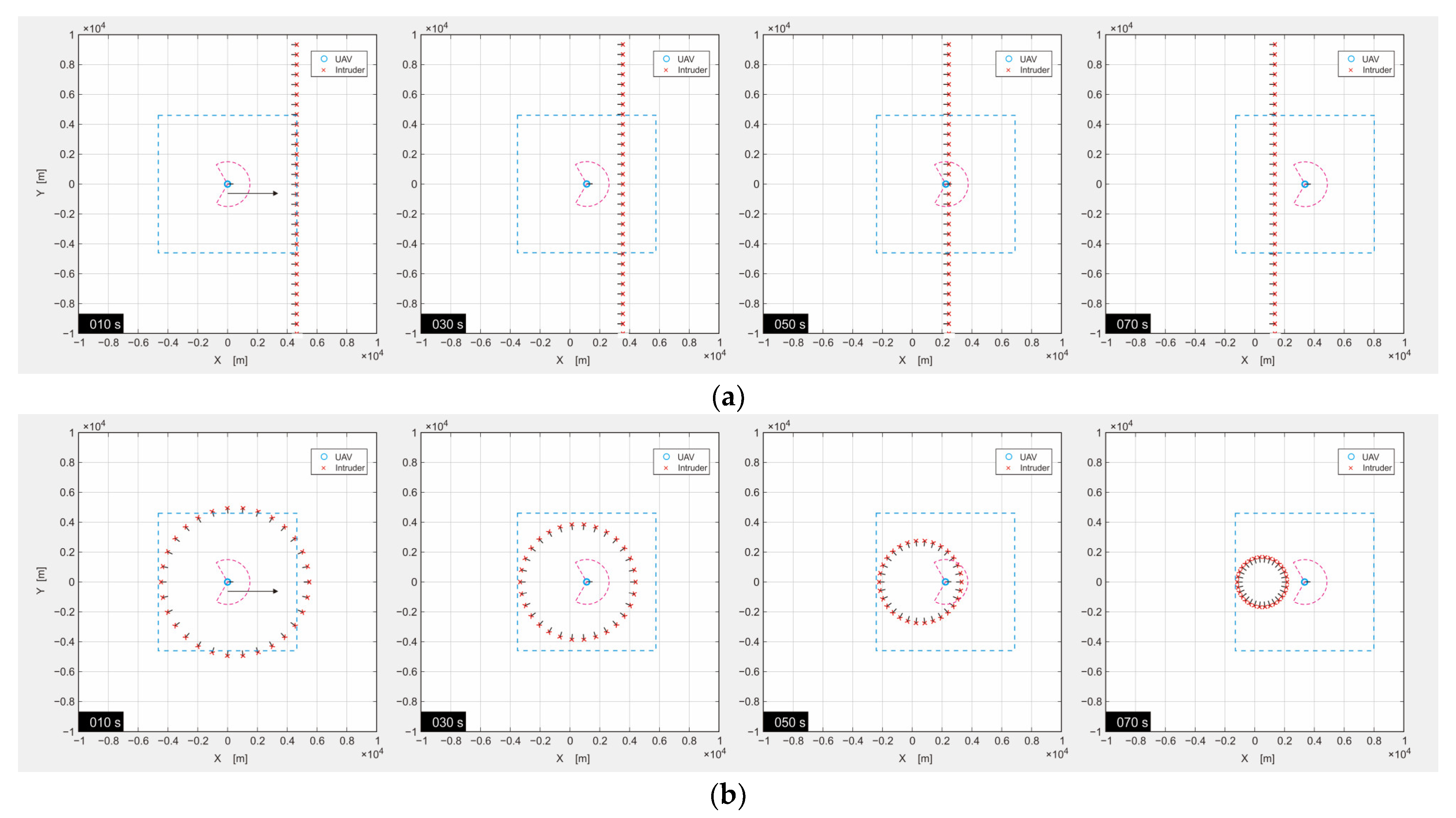
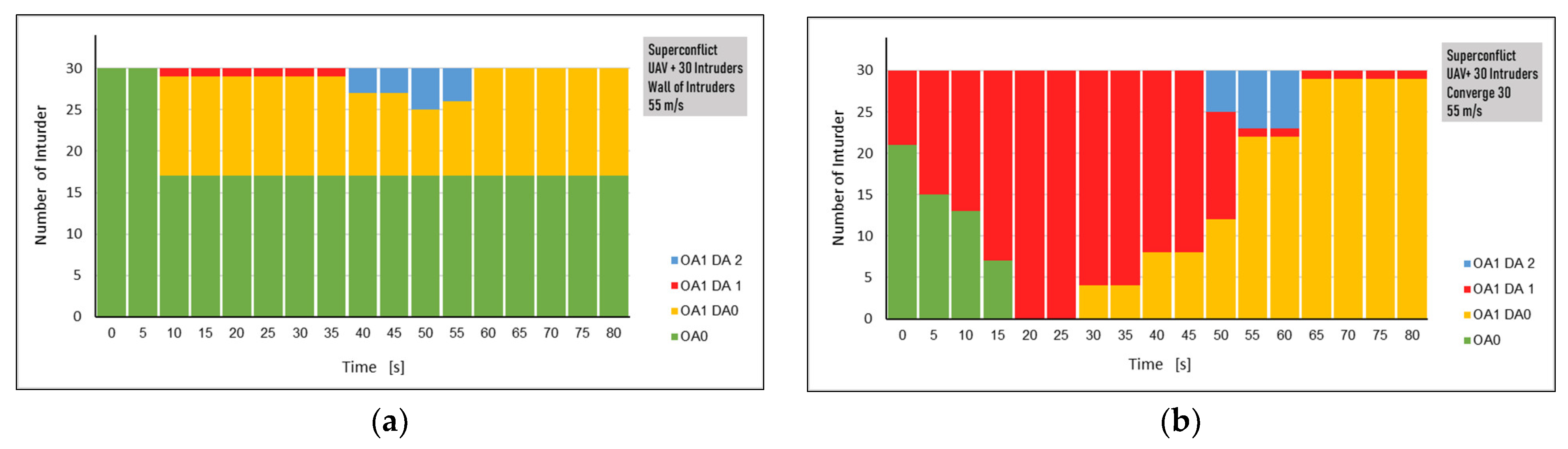
4.4. Test Run: Superconflicts
5. Monte Carlo Simulations, Results, and Analyses
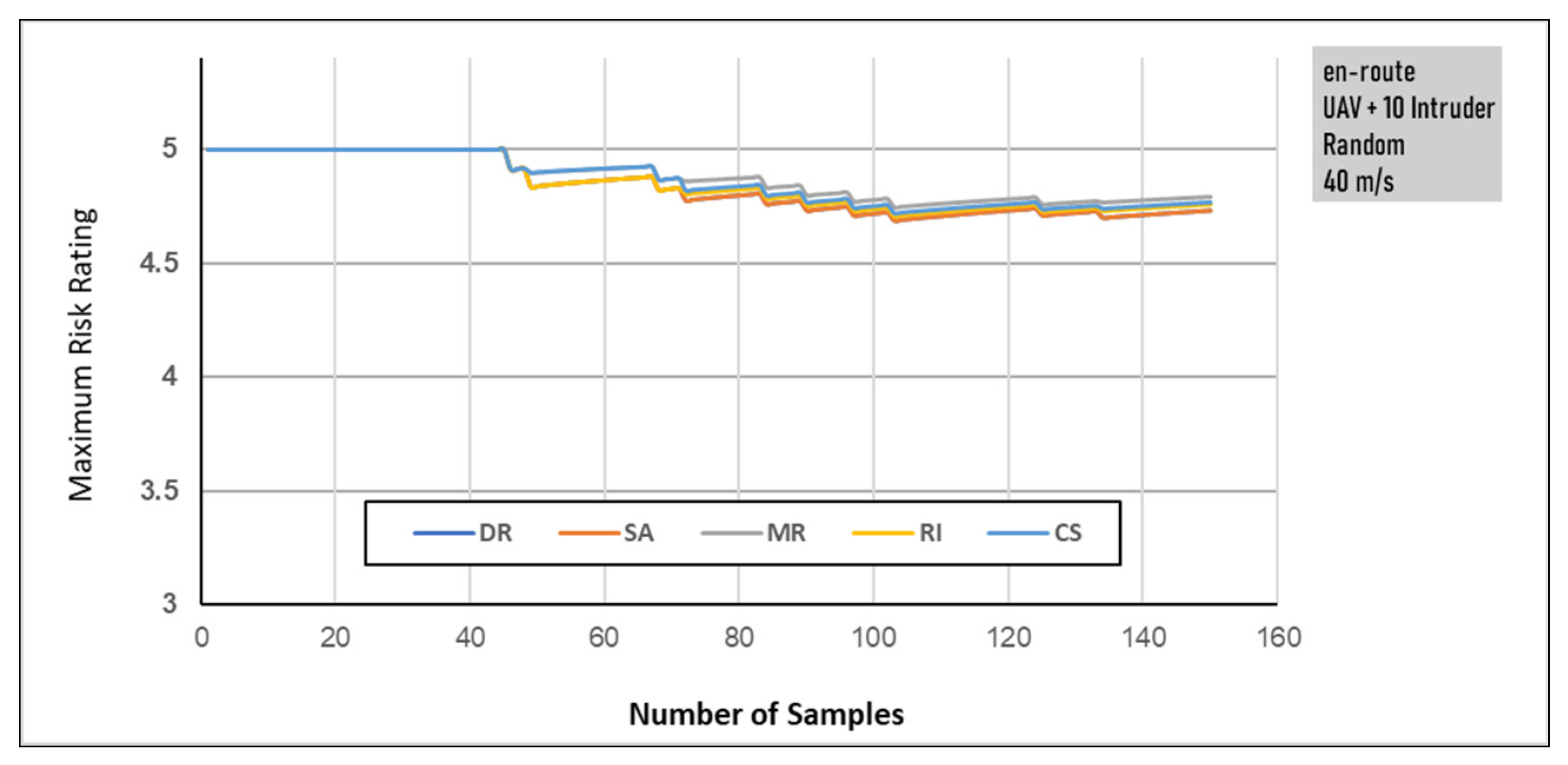
5.1. Test for Convergencies
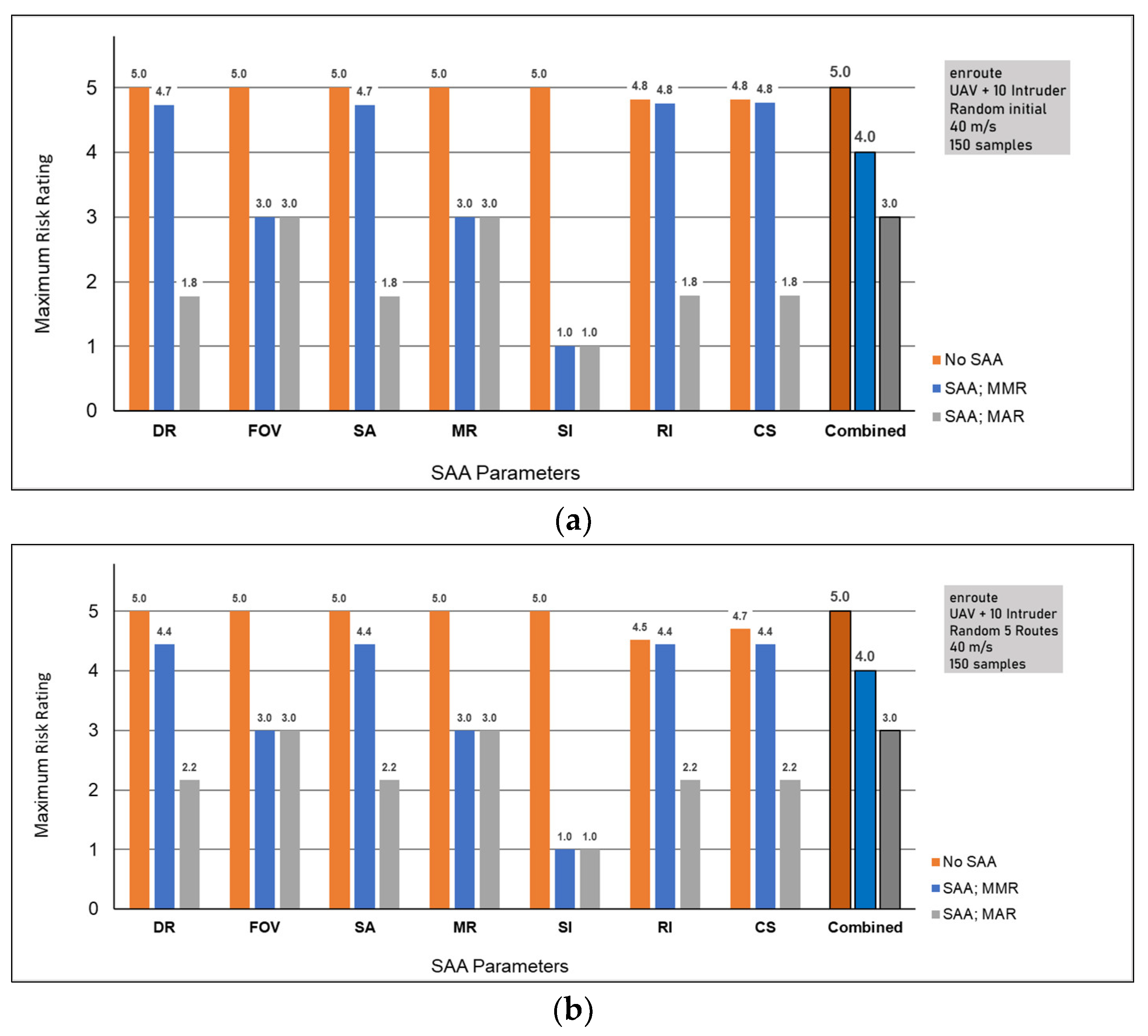
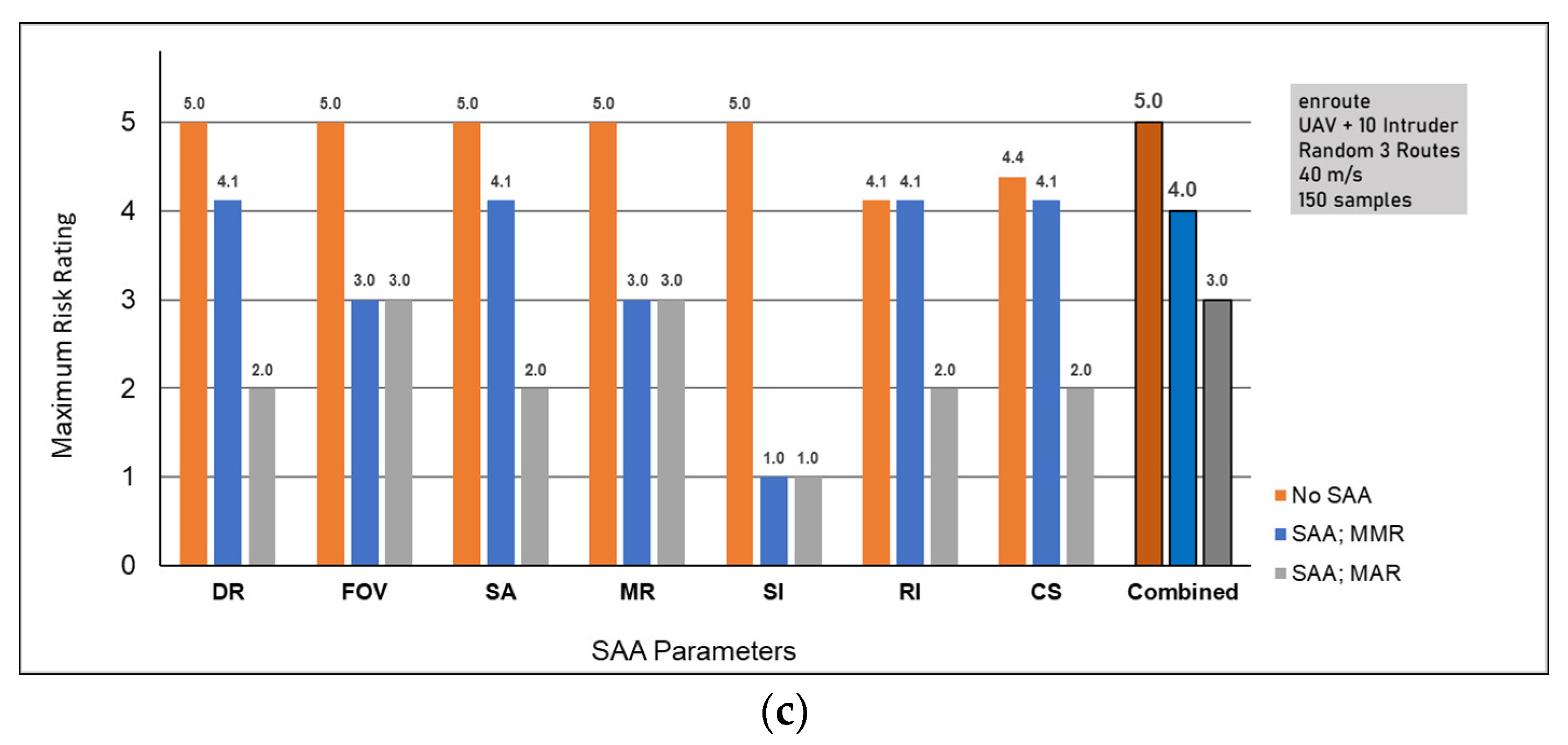
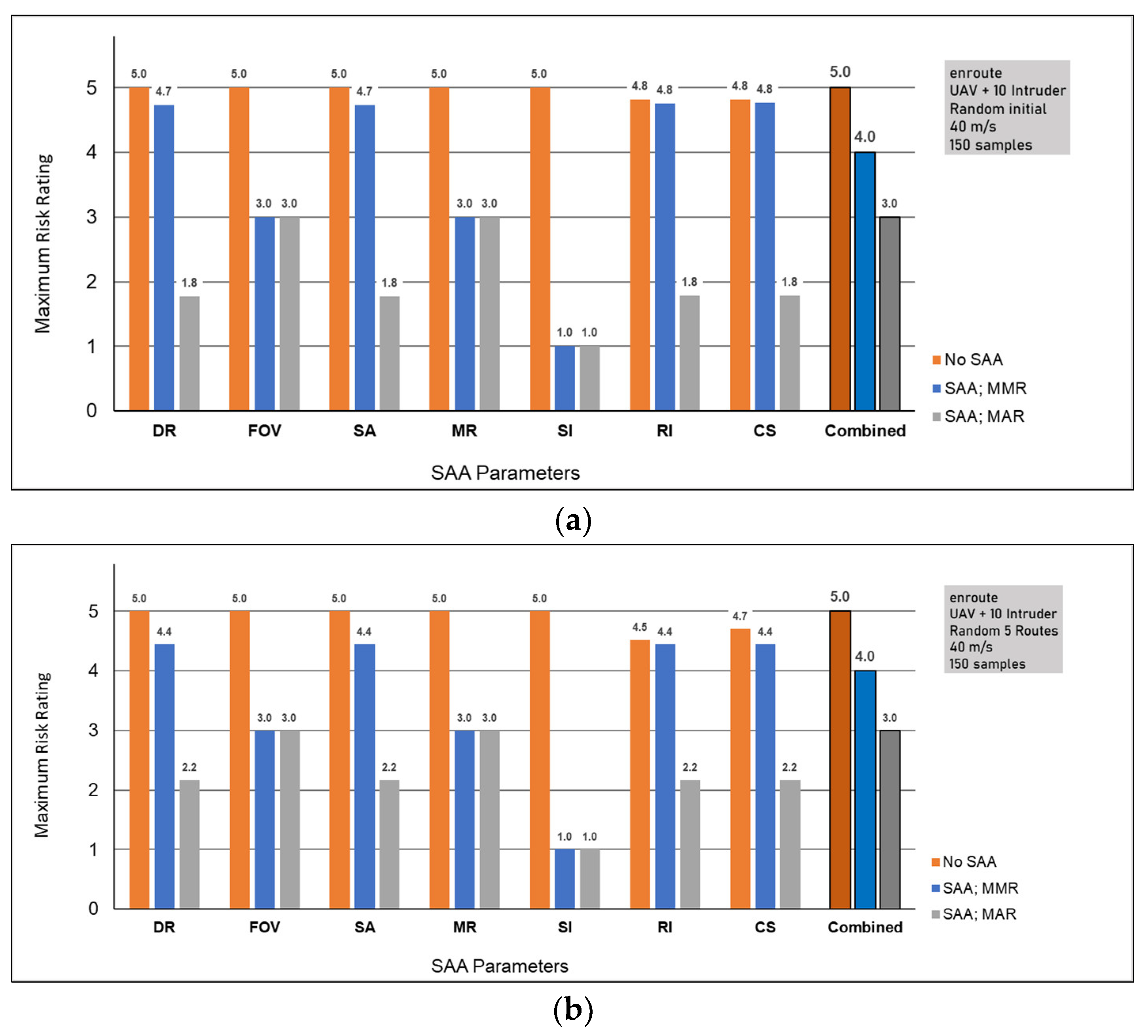
5.2. Maximum Risk Rating
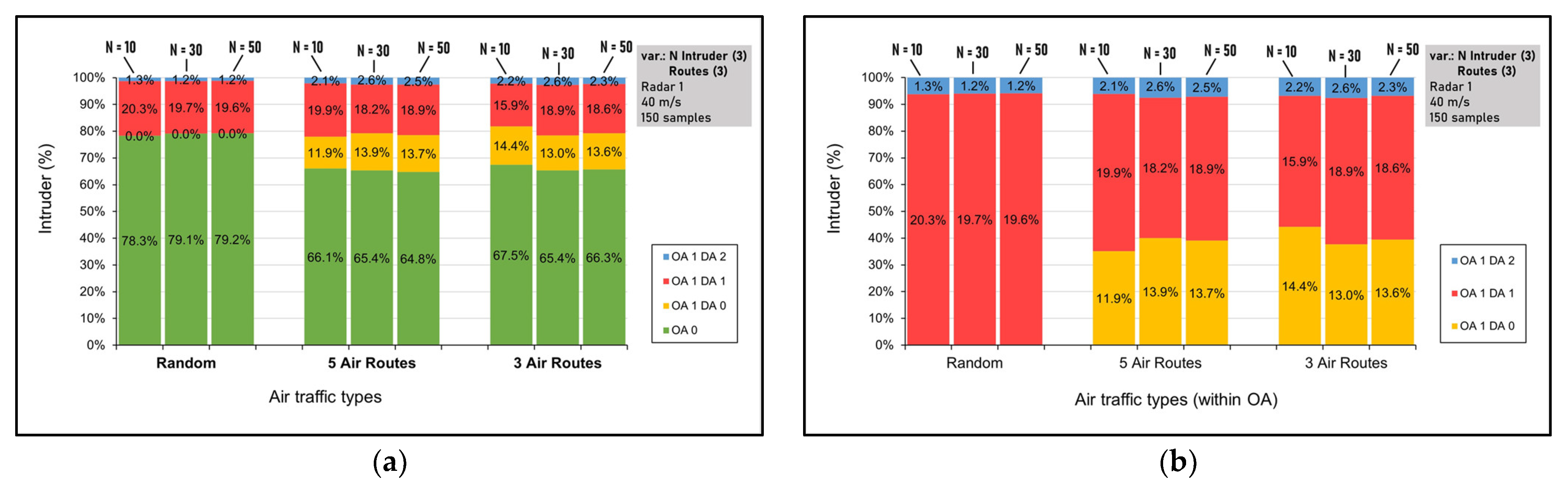
5.3. Effect of the Number of Intruders
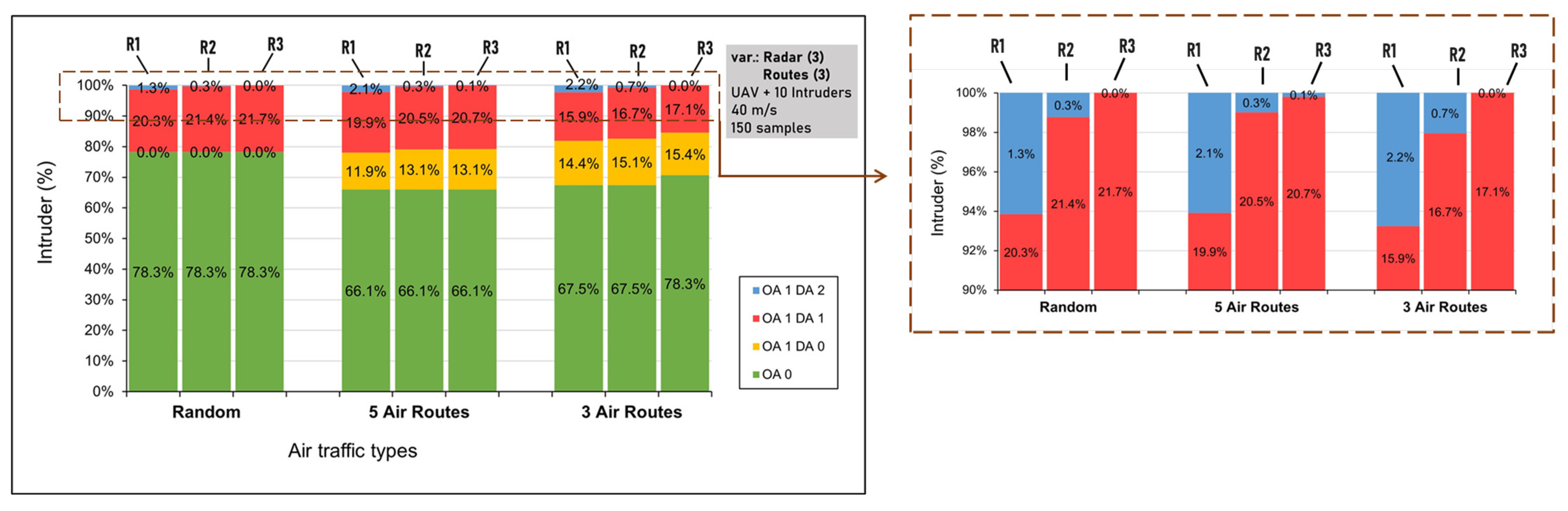
5.4. Effect of Radar Capability
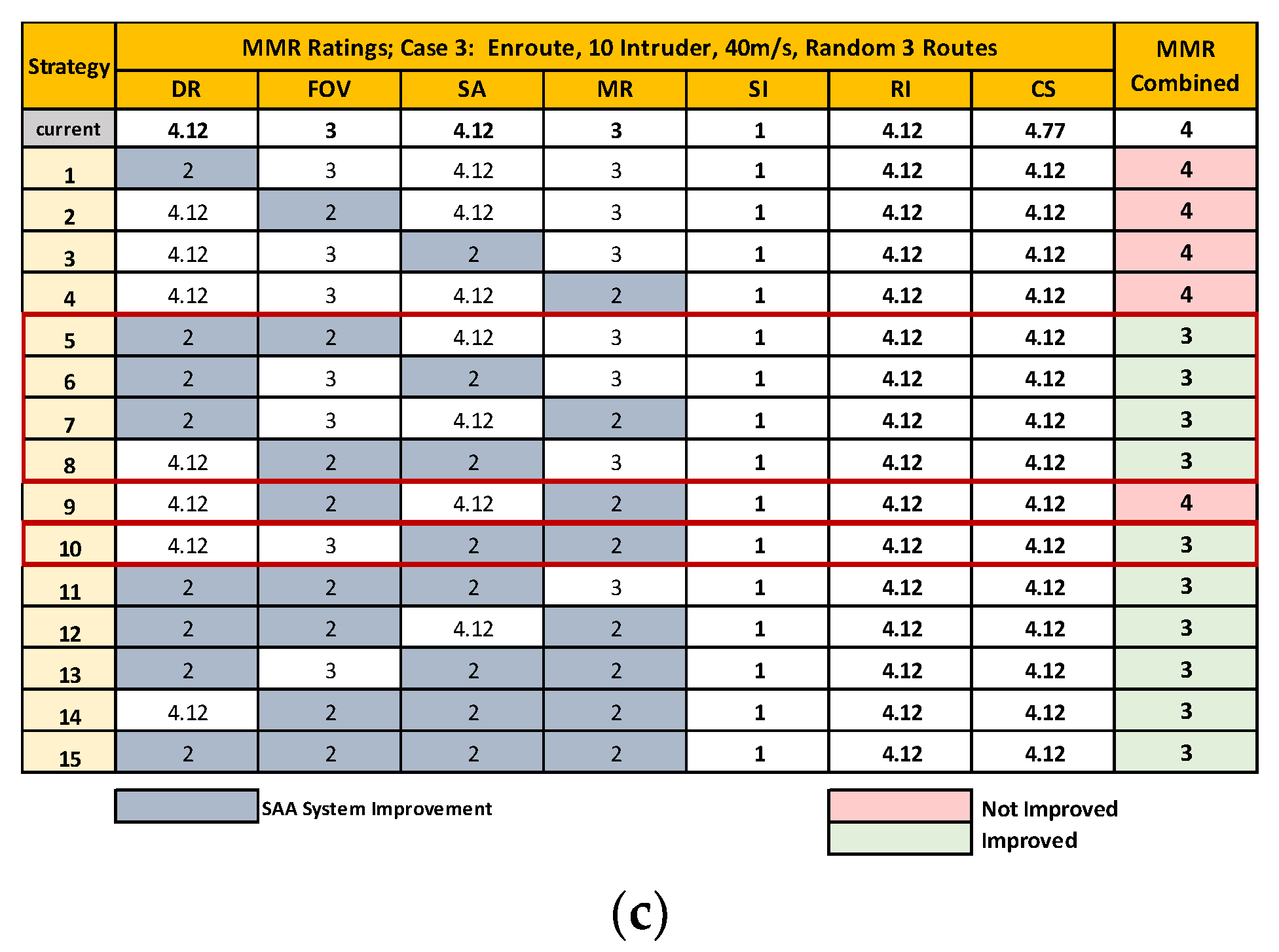
5.5. Options for Risk Rating Reduction
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- DeGarmo, M.T. Section 2 Issues. In Issues Concerning Integration of Unmanned Aerial Vehicles in Civil Airspace; MITRE Center for Advanced Aviation System Development: Arlington, VA, USA, 2004; pp. 1–59. [Google Scholar]
- MAA; BALPA. Scenarios. In Small Remotely Piloted Aircraft Systems (Drones) Mid-Air Collision Study; Department for Transport, Crown: London, UK, 2016; pp. 9–12. [Google Scholar]
- Dalamagkidis, K.; Valavanis, K.P.; Piegl, L.A. On unmanned aircraft systems issues, challenges and operational restrictions preventing integration into the National Airspace System. Prog. Aero. Sci. 2008, 44, 503–519. [Google Scholar] [CrossRef]
- Bijjahalli, S.; Gardi, A.; Pongsakornsathien, N.; Sabatini, R.; Kistan, T.A. Unified Airspace Risk Management Framework for UAS Operations. Drones 2022, 6, 184. [Google Scholar] [CrossRef]
- Clothier, R.A.; Walker, R.A. Safety Risk Management of Unmanned Aircraft Systems. In Handbook of Unmanned Aerial Vehicles; Valavanis, K., Vachtsevanos, G., Eds.; Springer: Dordrecht, The Netherlands, 2015; pp. 2229–2275. [Google Scholar]
- Liu, Y.; Zhu, Y.; Wang, Z.; Zhang, X.; Li, Y. Ground Risk Estimation of Unmanned Aerial Vehicles Based on Probability Approximation for Impact Positions with Multi-Uncertainties. Electronics 2023, 12, 829. [Google Scholar] [CrossRef]
- Jenie, Y.I.; van Kampen, E.-J.; Ellerbroek, J.; Hoekstra, J.M. Taxonomy of Conflict Detection and Resolution Approaches for Unmanned Aerial Vehicle in an Integrated Airspace. IEEE Trans. Int. Tran. Sys. 2017, 18, 558–567. [Google Scholar] [CrossRef]
- Tang, J.; Chen, X.; Zhu, X.; Zhu, F. Dynamic Reallocation Model of Multiple Unmanned Aerial Vehicle Tasks in Emergent Adjustment Scenarios. IEEE Tran Aero. Elec. Sys. 2023, 59, 1139–1155. [Google Scholar] [CrossRef]
- Tang, J.; Liu, G.; Pan, Q.T. A Review on Representative Swarm Intelligence Algorithms for Solving Optimization Problems: Applications and Trends. IEEE/CAA J. Auto. Sin. 2021, 8, 1627–1643. [Google Scholar] [CrossRef]
- Jenie, Y.I.; van Kampen, E.-J.; Ellerbroek, J.; Hoekstra, J.M. Safety Assessment of a UAV CD&R System in High Density Airspace Using Monte Carlo Simulations. IEEE Trans. Int. Tran. Sys. 2018, 19, 2686–2695. [Google Scholar]
- Klaus, R.A. Development of a Sense and Avoid System for Small Unmanned Aircraft Systems. Master’s Thesis, Brigham Young University, Provo, UT, USA, 7 August 2013. [Google Scholar]
- Yu, X.; Zhang, Y. Sense and avoid technologies with applications to unmanned aircraft systems: Review and prospects. Prog. Aero. Sci. 2015, 74, 152–166. [Google Scholar] [CrossRef]
- Orefice, M.; Di Vito, V.; Torrano, G. Sense and Avoid: Systems and Methods. In Encyclopedia of Aerospace Engineering; Blockley, R.H., Shyy, W., Eds.; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2015; pp. 1–9. [Google Scholar]
- Fasano, G.; Accado, D.; Moccia, A. Sense and Avoid for Unmanned Aircraft Systems. IEEE Aerosp. Electron. Syst. Mag. 2016, 31, 82–110. [Google Scholar] [CrossRef]
- Pham, H.; Smolka, S.A.; Stoller, S.D.; Phan, D.; Yang, J. A Survey on Unmanned Aerial Vehicle Collision Avoidance Systems. arXiv 2015, arXiv:1508.07723. [Google Scholar]
- Strobel, A.; Schwarzbach, M. Cooperative Sense and Avoid: Implementation in Simulation and Real World for Small Unmanned Aerial Vehicles. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014. [Google Scholar]
- Detect & Avoid—DAA: The Power of Combining Multiple Sensors. Available online: https://www.embention.com/news/detect-avoid/ (accessed on 19 April 2023).
- Nepal, R.; Zhang, Y.; Blake, W. Sense and Avoid Airborne Radar Implementations on a Low-Cost Weather Radar Platform. Aerospace 2017, 4, 11. [Google Scholar] [CrossRef]
- Kim, K.Y.; Park, J.W.; Tahk, M.J. UAV Collision Avoidance Using Probabilistic Method in 3-D. In Proceedings of the 2007 International Conference on Control, Automation and Systems, Seoul, Republic of Korea, 17–20 October 2007. [Google Scholar]
- McFadyen, A.; Durand-Petiteville, A.; Mejias, L. Decision Strategies for Automated Visual Collision Avoidance. In Proceedings of the 2014 International Conference on Unmanned Aircraft Systems (ICUAS), Orlando, FL, USA, 27–30 May 2014. [Google Scholar]
- Choi, H.; Kim, Y.; Hwang, I. Reactive Collision Avoidance of Unmanned Aerial Vehicles Using a Single Vision Sensor. AIAA J. Guid. Control Dyn. 2013, 36, 1234–1240. [Google Scholar] [CrossRef]
- Park, J.-W.; Oh, H.-D.; Tahk, M.-J. UAV Collision Avoidance Based on Geometric Approach. In Proceedings of the 2008 SICE Annual Conference, Chofu, Japan, 20–22 August 2008. [Google Scholar]
- Huang, Z.; Li, Q.; Zhao, J.; Song, M. Variational Quantum Algorithm Applied to Collision Avoidance of Unmanned Aerial Vehicles. Entropy 2022, 24, 1685. [Google Scholar] [CrossRef] [PubMed]
- Skowron, M.; Chmielowiec, W.; Glowacka, K.; Krupa, M.; Srebro, A. Sense and Avoid for Small Unmanned Aircraft Systems: Research on methods and best practices. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 6044–6062. [Google Scholar] [CrossRef]
- Chand, B.N.; Mahalakshmi, P.; Naidu, V.P.S. Sense and Avoid Technology in Unmanned Aerial Vehicles: A Review. In Proceedings of the 2017 International Conference on Electrical, Electronics, Communication, Computer and Optimization Techniques (ICEECCOT), Mysuru, India, 15–16 December 2017. [Google Scholar]
- Jenie, Y.I.; van Kampen, E.-J.; Ellerbroek, J.; Hoekstra, J.M. Selective Velocity Obstacle Method for Deconflicting Maneuvers Applied to Unmanned Aerial Vehicles. AIAA J. Guid. Control Dyn. 2015, 38, 1140–1146. [Google Scholar] [CrossRef]
- Hoekstra, J.M.; Ellerbroek, J. Aerial Robotics: State-based Conflict Detection and Resolution (Detect and Avoid) in High Traffic Densities and Complexities. Curr. Robot. Rep. 2021, 2, 297–307. [Google Scholar] [CrossRef]
- Zio, E. System Reliability and Risk Analysis by Monte Carlo Simulation. In The Monte Carlo Simulation Method for System Reliability and Risk Analysis; Springer: London, UK, 2013; pp. 59–81. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensor Name | Category | Application | Type UAV | Remarks |
|---|---|---|---|---|
| TCAS | Cooperative | Range and relative altitude | Large UAV | Well proven |
| Widely used | ||||
| Detect only other crafts | ||||
| ADSB | Cooperative | Relative position and relative velocity | Medium to Large UAV | Well-proven Can’t detect ground obstacles |
| Radar | Non-Cooperative | Relative position and velocity | All types | Typically, poor accuracy |
| Active | Most widely used | |||
| Lidar | Non-Cooperative | Range, azimuth, and elevation | All types | Easy configuration |
| Active | Narrow Field of View | |||
| Sonar | Non-Cooperative | Relative position and velocity | All types | Less popular in UAV |
| Active | ||||
| Optical | Non-Cooperative | Azimuth and elevation | Medium to Small UAV | Widely used in smaller UAVs |
| Passive | Data link required | |||
| Acoustic | Non-Cooperative | Range | Medium | Less popular |
| Passive | ||||
| GPS | Non-Cooperative | Position and relative velocity | All types | - |
| Passive |
| No | Parameter | Values Symbol | Remarks |
|---|---|---|---|
| 1 | Detection Range (DR) | D1 | D1: Detection Range Ratio |
| DR Rating: 1–5 | |||
| 2 | Field of View (FOV) | D2 | D2: Area of field of View Ratio |
| FOV Rating: 1–5 | |||
| 3 | Sensing Accuracy (SA) | D3 | D3: Sensing Accuracy Ratio |
| SA Rating: 1–5 | |||
| 4 | Measurement Rate and Latencies (MR) | D4 | D4: Hits per scan |
| MR Rating: 1–5 | |||
| 5 | System Integration (SI) | D5 | D5: Output Type of SAA |
| SI Rating: 1–5 | |||
| 6 | Range of Intruder (RI) | D6 | D6: Intruder Range Ratio |
| IR Rating: 1–5 | |||
| 7 | Closing Speed (CS) | D7 | D7: Angle ratio |
| CS Rating: 1–5 |
| DR Rating | Value | Remarks | |
|---|---|---|---|
| 1 | 2 < D1 | Longest detection range, very safe to avoid. | |
| 2 | 1.6 < D1 ≤ 2 | ||
| 3 | 1.3 < D1 ≤ 1.6 | ||
| 4 | 1 < D1 ≤ 1.3 | ||
| 5 | D1 ≤ 1 | Shortest detection range, not safe to avoid | |
| FOV Rating | Value | Remarks | |
|---|---|---|---|
| 1 | D2 ≤ 1 | Widest detection area, lowest risk | |
| 2 | 1 < D2 ≤ 2 | ||
| 3 | 2 < D2 ≤ 3 | ||
| 4 | 3 < D2 ≤ 5 | ||
| 5 | D2 > 5 | Narrowest detection area, highest risk | |
| SA Rating | Value | Remarks | |
|---|---|---|---|
| 1 | D3 ≤ 10−4 | Smallest error, easy to detect objects accurately | |
| 2 | 10−4 < D3 ≤ 5 × 10−4 | ||
| 3 | 5 × 10−4 < D3 ≤ 10−3 | ||
| 4 | 10−3 < D3 ≤ 1.5 × 10−3 | ||
| 5 | D3 > 1.5 × 10−3 | Largest error, difficult to detect objects accurately | |
| MR Rating | Value | Remarks | |
|---|---|---|---|
| 1 | 5000 < D4 | Highest detectability | |
| 2 | 3000 < D4 ≤ 5000 | ||
| 3 | 1250 < D4 ≤ 3000 | ||
| 4 | 500 < D4 ≤ 1250 | ||
| 5 | D4 ≤ 500 | Lowest detectability | |
| Value D5 | Remarks |
|---|---|
| 1 | Integrated with FCS |
| 2 | Digital, the same data format |
| 3 | Digital, not the same data format |
| 4 | Analog with converter |
| 5 | Analog |
| SI Rating | Value | Remarks | |
|---|---|---|---|
| 1 | D5 = 1 | Easiest to integrate | |
| 2 | D5 = 2 | ||
| 3 | D5 = 3 | ||
| 4 | D5 = 4 | ||
| 5 | D5 = 5 | Hardest to integrate | |
| IR Rating | Value | Remarks | |
|---|---|---|---|
| 1 | 2 < D6 | Longest intruder distance, very safe to avoid. | |
| 2 | 1.6 < D6 ≤ 2 | ||
| 3 | 1.3 < D6 ≤ 1.6 | ||
| 4 | 1 < D6 ≤ 1.3 | ||
| 5 | D6 ≤ 1 | Shortest intruder distance, not safe to avoid | |
| CS Rating | Value | Remarks | |
|---|---|---|---|
| 1 | D7 < 0.2 | Highest chance to avoid | |
| 2 | 0.2 ≤ D7 < 0.4 | ||
| 3 | 0.4 ≤ D7 < 0.6 | ||
| 4 | 0.6 ≤ D7 < 0.8 | ||
| 5 | D7 ≥ 0.8 | Lowest chance to avoid | |
| Setup | Parameter | Input |
|---|---|---|
| General | Simulation Area | 2000 × 2000 m |
| Observation Area | 9260 × 9260 m | |
| Population | 1 ownship with 10 intruders | |
| Air Routes 3 cases of traffic |
| |
| UAV (Own Ship) | Initial Position | [0, 0] m |
| Speed | 40 m/s | |
| Heading | 0° | |
| SAA’s Radar | Detection Range | 1500 m |
| Field of View | 120° | |
| Hit per Scan | 1440 | |
| Integration | Integrated with FCC | |
| Intruders (1–10) | Initial Position | From −2000 to 2000 m (randomized for x and y) |
| Speed | 60 m/s | |
| Headings 3 cases of traffic | from −180–180° randomized for headings:
|
| Parameter | Radar 1 (R1) | Radar 2 (R2) | Radar 3 (R3) |
|---|---|---|---|
| Description | 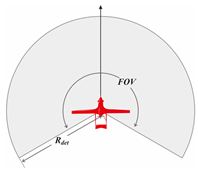 | 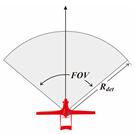 |  |
| Detection Range (Rdet) | 1500 m | 1000 m | 500 m |
| Field of View (FOV = 2ξ) | 120° | 80° | 40° |
| Hit per Scan | 1440 | 1440 | 1440 |
| Integration | Integrated with FCC | Integrated with FCC | Integrated with FCC |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fitrikananda, B.P.; Jenie, Y.I.; Sasongko, R.A.; Muhammad, H. Risk Assessment Method for UAV’s Sense and Avoid System Based on Multi-Parameter Quantification and Monte Carlo Simulation. Aerospace 2023, 10, 781. https://doi.org/10.3390/aerospace10090781
Fitrikananda BP, Jenie YI, Sasongko RA, Muhammad H. Risk Assessment Method for UAV’s Sense and Avoid System Based on Multi-Parameter Quantification and Monte Carlo Simulation. Aerospace. 2023; 10(9):781. https://doi.org/10.3390/aerospace10090781
Chicago/Turabian StyleFitrikananda, Bona P., Yazdi Ibrahim Jenie, Rianto Adhy Sasongko, and Hari Muhammad. 2023. "Risk Assessment Method for UAV’s Sense and Avoid System Based on Multi-Parameter Quantification and Monte Carlo Simulation" Aerospace 10, no. 9: 781. https://doi.org/10.3390/aerospace10090781
APA StyleFitrikananda, B. P., Jenie, Y. I., Sasongko, R. A., & Muhammad, H. (2023). Risk Assessment Method for UAV’s Sense and Avoid System Based on Multi-Parameter Quantification and Monte Carlo Simulation. Aerospace, 10(9), 781. https://doi.org/10.3390/aerospace10090781