3.1. The Necessity for Introducing the Power Balance Iteration
As the rotation speed and mass flow fuel solved by low-dimensional methods can be used as the definite condition for the 3D CFD steady-state simulation, the influence of the error of these definite conditions on the simulation results of the engine should be analysed.
First, shaft power should be evaluated to determine whether the power of the coaxial components matches or not. The shaft power can be estimated using the aero-thermodynamic parameters based on the following three approaches:
(1) 0D/1D model: estimate the power according to the enthalpy change
between inlet and outlet:
(2) 2D model: estimate the power according to the circulation
:
(3) 3D model: estimate the power according to the torque of the rotating parts:
where
is the torque of the rotating parts of the compressor or turbine,
S is the surface comprising all rotating parts,
is the total stress tensor,
is a unit vector normal to the surface,
is the position vector, and
is a unit vector parallel to the axis of rotation.
The power calculation method based on the 0D/1D model is mainly used in 0D simulations based on data model and thermodynamic cycle. The method based on the 2D model is mainly used in through-flow simulation, such as the streamline curvature method or time marching method for S2 stream surface calculation. The method based on the 3D model is used in the 3D CFD simulations, such as the ‘component-coupled’ simulation in this paper.
With the 3D flow field data obtained by CFD simulation of the compressor and turbine, the torque characteristics are calculated using the above three shaft power calculation methods (
7)–(
9a,
9b). As shown in the following
Figure 7 and
Figure 8.
It can be seen that the shaft power characteristics obtained by these three calculation methods are basically consistent. While at the low mass flow, the relative deviations from these three methods are larger for both the compressor and the turbine. The maximum relative deviation between and is approximately and for the compressor and turbine, respectively. The relative deviation between and is and for compressor and turbine. For a turbine, when it works normally at the ‘turbine state’ (output positive shaft power), the relative deviation is generally under . Actually, and are both calculated with the integration of the 3D flow field, while is calculated by integrating the circumferentially averaged 2D flow field. This leads to the deviation in calculating shaft power , especially for low mass flow state with wide range recirculation region. The deviations in the power calculation results reflect the utilization degree of 3D flow field data in these three approaches.
Second, the numerical error of the residual Equations (
1)–(
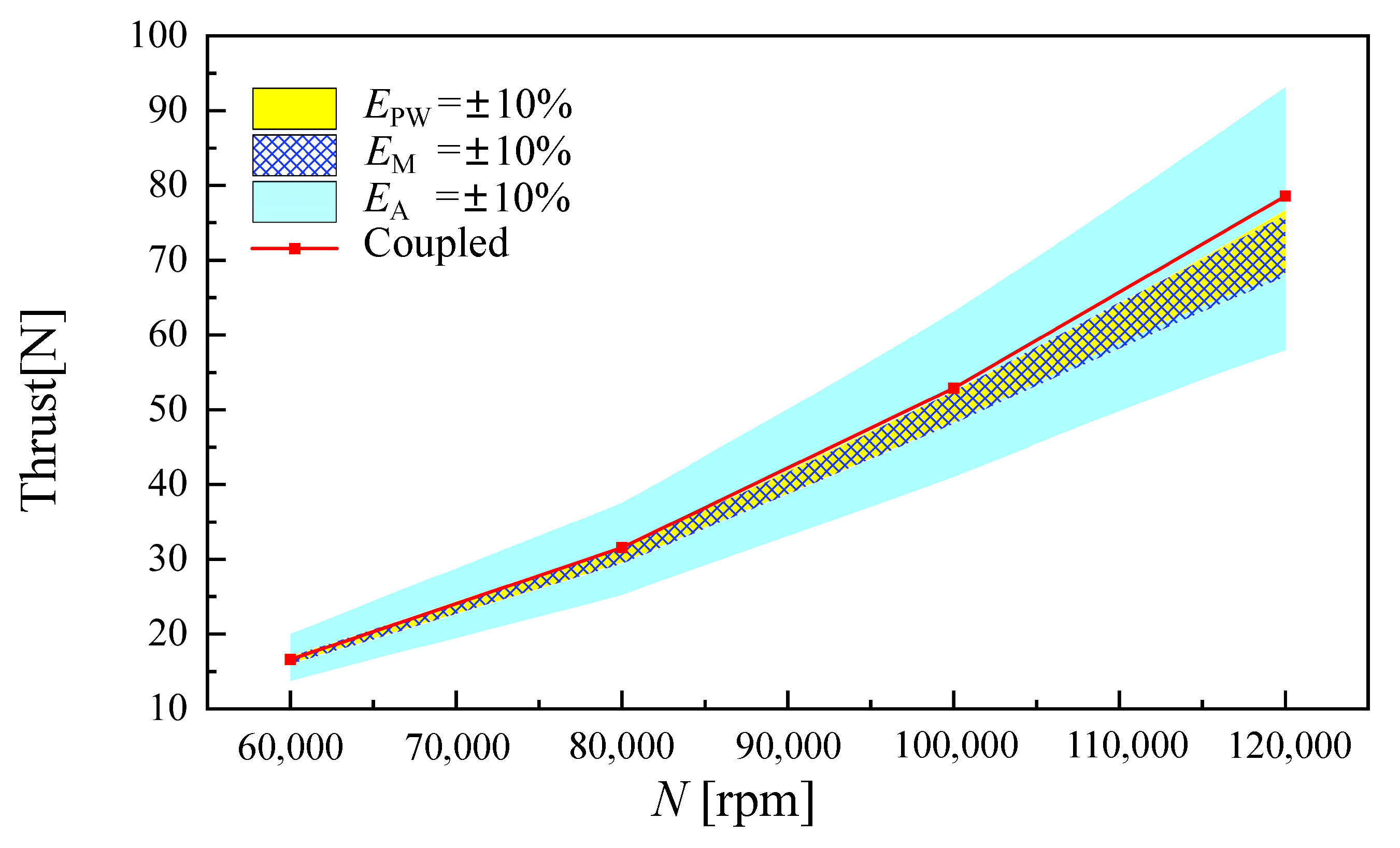
3) will also lead to inaccurate definite conditions for the 3D CFD simulation. Assuming an 10% error for
,
,
, the fuel supply and thrust characteristics of the engine are obtained based on ‘component-coupled’ simulation. The results are shown in
Figure 9 and
Figure 10. The color band reflects the range of the corresponding engine characteristic parameters under the specific error. The red line represents the calculation result of the ‘component-coupled’ simulation.
As shown in
Figure 9 and
Figure 10, the mass flow residual
and power residual
have roughly the same effects on fuel consumption and the engine thrust especially at low rotation speeds. This reflects the positive correlation between power and mass flow. In fact, only when working at the choke state, this kind of positive correlation will no longer be valid. As for the throat area
, it determines the expansion of gas in the nozzle and the static pressure at the outlet of the nozzle. As shown in
Figure 10, the residual
had little impact on the fuel mass flow of the convergent nozzle, but had a more significant impact on the thrust. As we know, the convergent nozzle always works near the critical state. Compared with the mass flow, the static pressure at the outlet of the nozzle is more sensitive to the throat area
. For this reason, the throat area
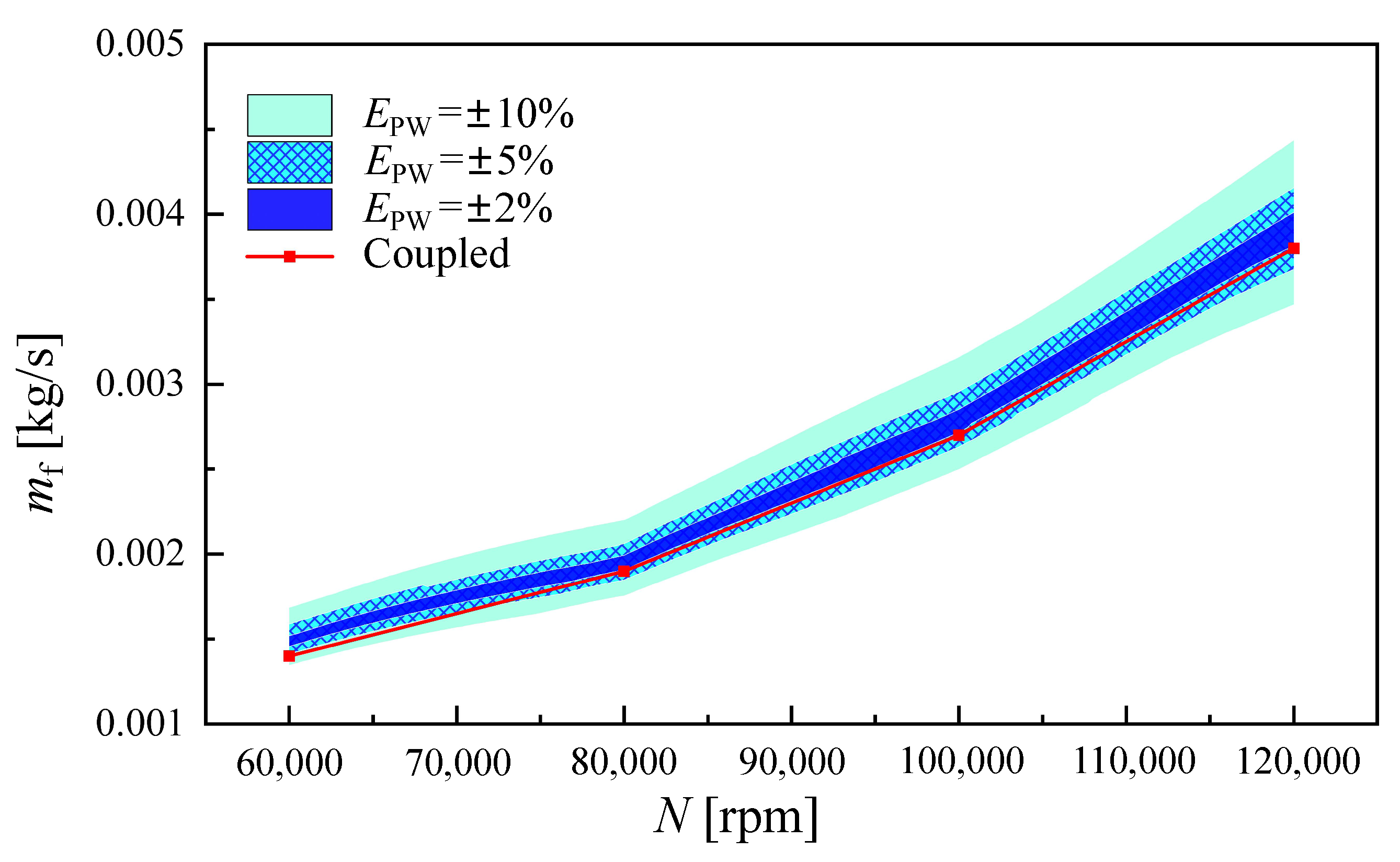
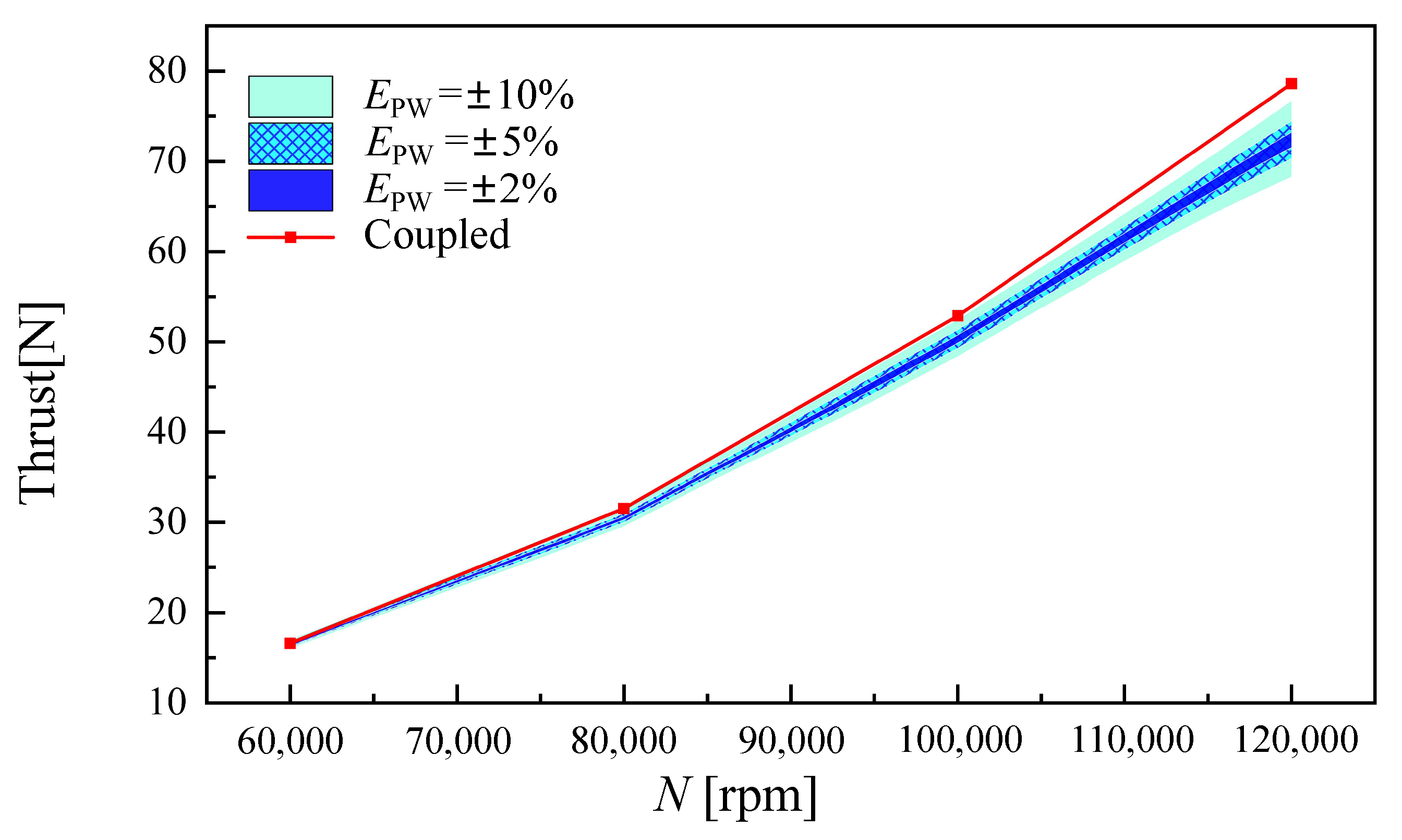
directly affects the calculation of the pressure thrust. Taking the power residual as an example, the ‘component- matched’ simulations were carried out with
,
, and
, while ensuring that the errors of
and
were sufficiently small. As shown in
Figure 11 and
Figure 12, the color bands became finer as the power residual
decreased. However, the ‘component-matched’ simulation results still deviate from the ‘component-coupled’ simulation results (the red line). This indicates that this deviation cannot be eliminated by improving the solving precision of residual equations.
Because of the difference in the models for ‘component-matched’ and ‘component-coupled’ simulation, the traditional practice of using the ‘component-matched’ simulation results as the input definite condition for ‘component-coupled’ simulation cannot avoid this kind of modelling error. Therefore, to overcome this defect in the current method, the power of the coaxial components must be matched automatically by introducing the power balance iteration into the steady-state 3D CFD solver.
3.2. The Influences of the Co-Working Constraints
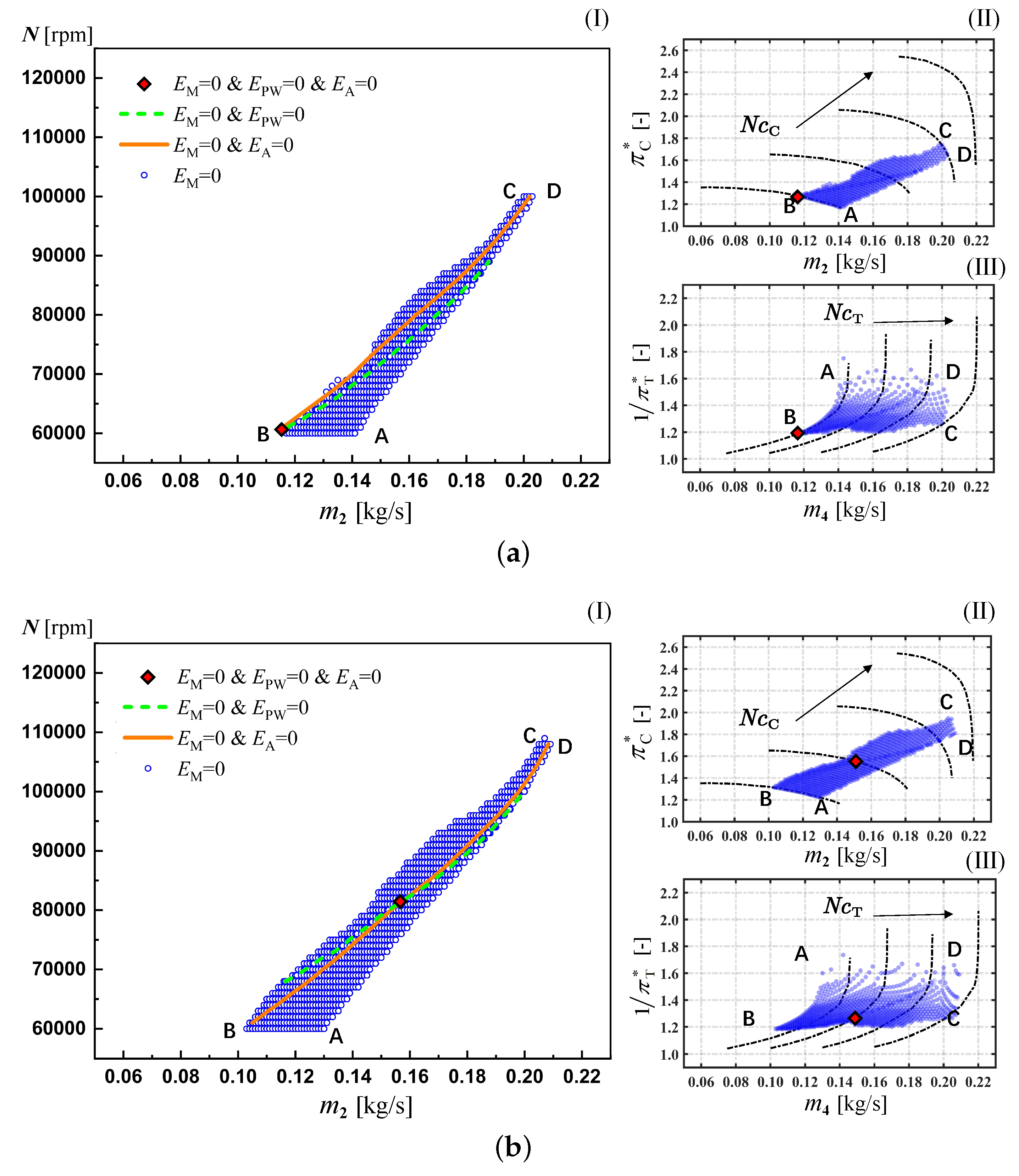
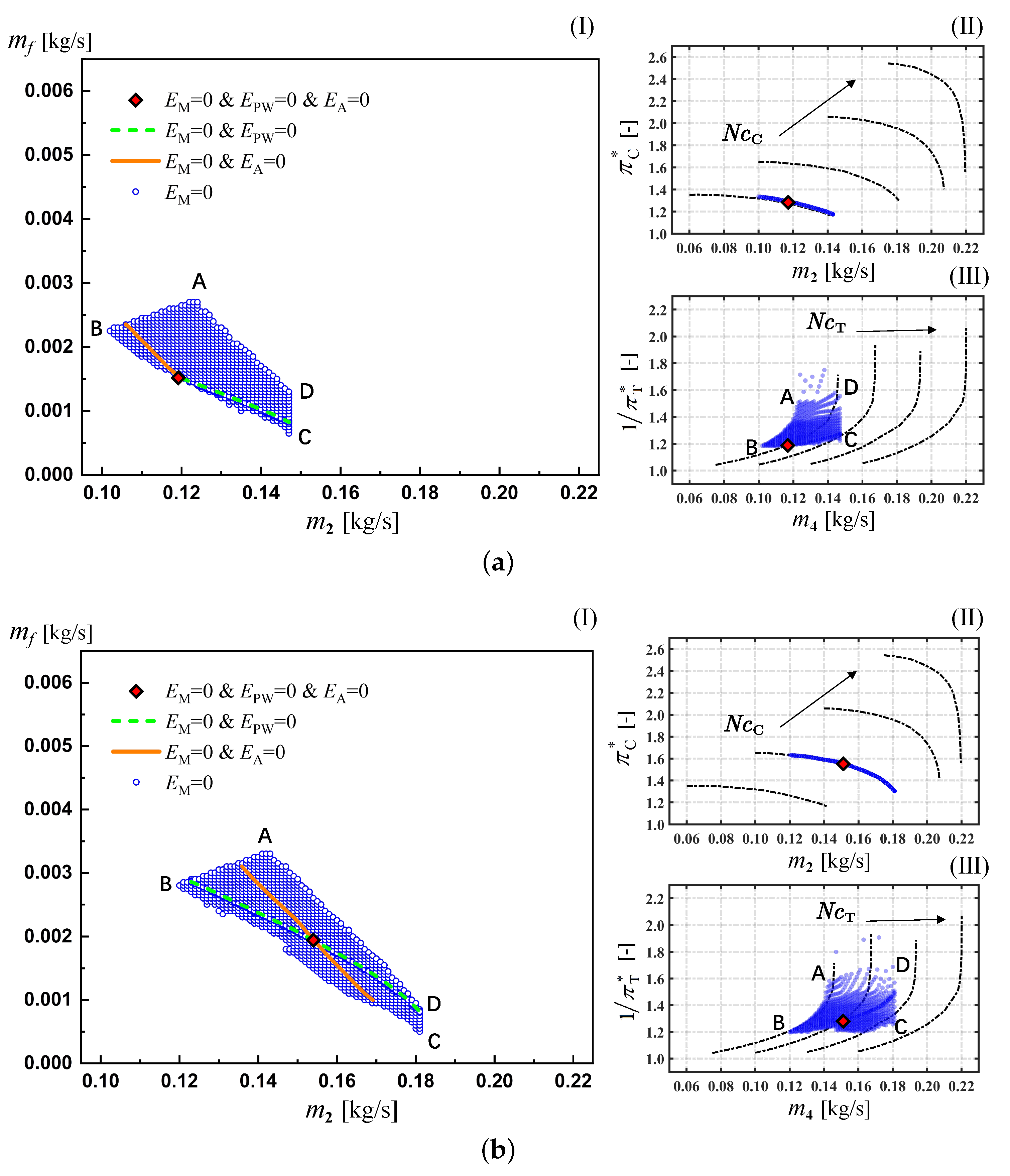
The working state of the gas turbine engine can be represented by points in the parameter space. When working at steady state, these points can be regarded as the intersection points of the constraint surface , and . To analyse the effects of these co-working constraints on the engine state, the constraints were imposed one by one when solving the engine performance using the ‘component-matched’ simulation.
Taking rotation speed
N as the iterative variable
, the feasible state points of the engine are constrained in the A-B-C-D zone by
, as shown in
Figure 13. The solid and dotted lines in Figure represent the feasible state of the engine when the mass flow constraint
and the throat area constraint
are added respectively. And the red diamond point represents the stable co-working state of the engine obtained with all constraints. The A-B boundary of the feasible region in
Figure 13a,b is limited by the lowest speed line of the compressor characteristic map. The C-D boundary in
Figure 13d is limited by the highest speed line of the compressor characteristic map. When the characteristic map is extended to lower and higher speeds, the feasible region in the parameter space will be the typical inverted-triangle shape similar to
Figure 13c.
According to the characteristic maps, for the A-D boundary of the feasible region, the turbine works with the maximum corrected mass flow for a specific rotation speed. With the same mass flow, the physical rotation speed at the B-C boundary is larger than that at the A-D boundary. The compressor total pressure ratio is also higher. Considering the approximate isobaric combustion environment in the burner, the total turbine inlet pressure at the B-C boundary is higher, and the corrected mass flow of the turbine is smaller than that at the A-D boundary. With a small change in the total pressure recovery coefficient of the burner, the B-C boundary of the feasible region is limited by the lower limit of the expansion ratio of the turbine. The expansion ratio of the turbine changes slowly and always tends to be at different rotation speeds, especially at a low corrected mass flow .
Taking fuel mass flow
as the iterative variable
, the feasible state points of the engine under different constraints are shown in
Figure 14. Similar to
Figure 13, the mass flow conservation constraint
limits the feasible state points to the area bounded by the A-B-C-D zone. In this region, the D-C boundary is limited by the maximum mass flow of the constant rotation speed line in the compressor’s map, just as shown in the
Figure 14a,b. At the A-D boundary of the feasible region, the turbine works at the maximum corrected mass flow. At the BC boundary, the turbine works with a smaller expansion ratio at approximately 1.2. When the engine works at low rotation speed, the turbine is at the B-C boundary with a low mass flow. While at high rotation speed, the turbine approaches the choke boundary A-D. In contrast, the compressor is always in the peak efficiency area at different co-working points of the engine.
As shown in
Figure 13 and
Figure 14, regardless of whether the iterative variable is fuel mass flow or rotation speed, the stable co-working states solved by power balance iteration are almost the same. With the increase of fuel mass flow, the rotation speed also increases correspondingly. This positive correlation adheres to our intuition and is actually a general regularity for this kind of turbojet engine without many control parameters.
In addition, for the above 0D ‘component-matched’ simulation in
Figure 13 and
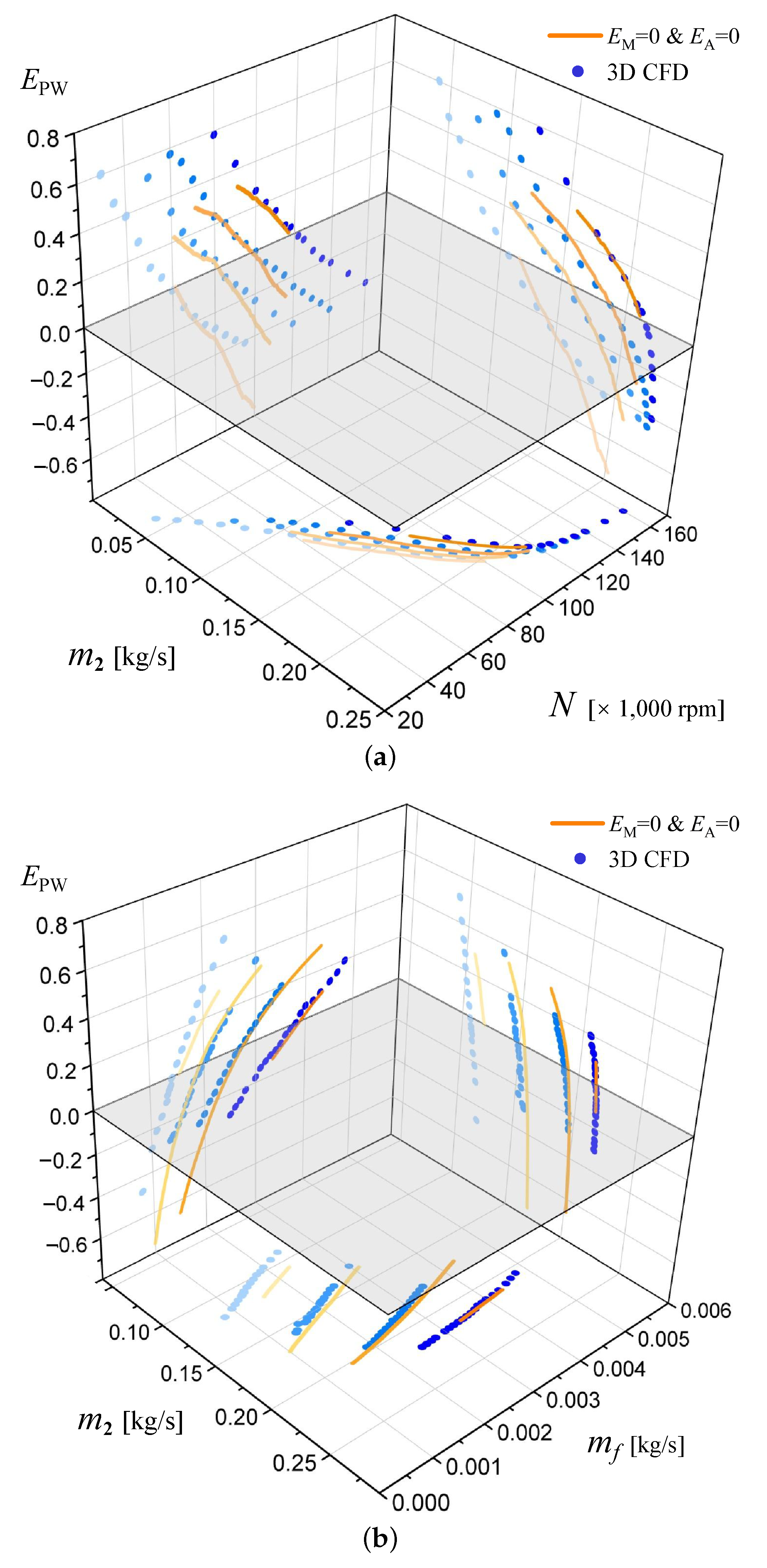
Figure 14, the state points with a release of power balance constraints fell onto the orange solid lines. The orange solid lines show the characteristics of local linearity. To verify this local linearity relationship, the ‘component-coupled’ 3D CFD method without power balance constraints was used to simulate these state points. The relationship between power residuals
, iterative variables
and air mass flow of the engine
are shown in
Figure 15a,b for
and
respectively.
The blue dots in the figures represent the calculation results of the 3D CFD simulation and the orange lines represent the 0D thermal simulation. Both of them are solved with the given rotation speed and fuel mass flow. In other words, the power balance constraints of the ‘component-coupled’ 3D CFD method and ‘component-matched’ 0D thermal method are both released to solve the results in
Figure 15a,b. The orange lines in
Figure 15 are correspond to the orange lines in
Figure 13 and
Figure 14.
As seen from
Figure 15, the blue dots and the orange line have the same trend and basically coincide. This means in the steady 3D CFD calculation of the full engine, the co-working constraints
and
will be automatically satisfied when the aerodynamic parameters tend to be stable. However, the power balance constraints
= 0 can be satisfied only at the specific fuel mass flow and rotation speed. This kind of state with only steady aerodynamic parameters but not with steady rotation speed can be regarded as a quasi-steady state.
More importantly, near the constraint plane , the power residuals are inversely related to the rotation speed , but proportional to the fuel mass flow . This means that when the turbine output power is greater than the compressor needs (), the engine rotation speed N should be increased, or the fuel mass flow should be reduced. If , the engine rotation speed N should be reduced, or the fuel mass flow should be increased.
The above analysis of the co-working constraints of the gas turbine engine is helpful to understand the key factors limiting the state of the engine and provides a basis for reasonable component matching design. This illustrates the weakness of the 0D thermal cycle ‘component-matched’ simulation. It highly depends on the component data models (general characteristic maps), which should be precise and complete. Taking the windmill state as an example, since the rotating parts are significantly affected by the incoming wind, the compressor and turbine may work in three states: ‘compressor state’, ‘turbine state’ and ‘stirrer state’. Therefore, a general characteristic map including the above three states must be provided to obtain the steady windmill state under the specific incoming flow. Moreover, because of the local linearity between the
and
, the gradient
maintains the sign when solving the ‘component coupled’ 3D CFD simulation with power balance iteration according to the Formula (
6). These characteristics can be used to develop the power balance iteration strategies in steady-state 3D CFD simulations.
3.3. Power Balance Strategies for Steady-State 3D CFD Simulation
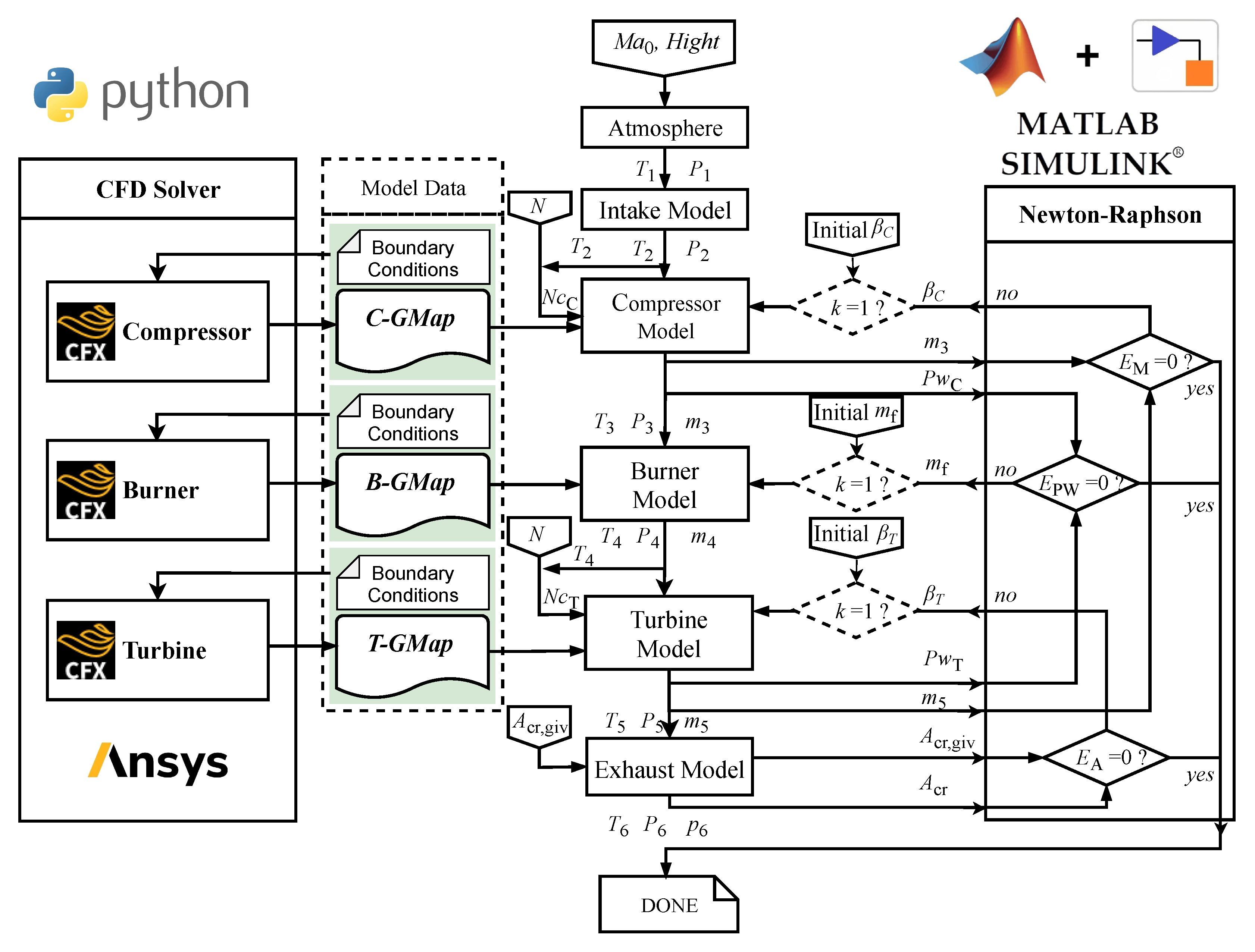
For the ‘component coupled’ 3D CFD method shown in
Figure 2b, the parameters involved in the power balance iteration include the relaxation factor
, the number of the timesteps per internal CFD calculation
and the gradient
=
. The gradient
can be estimated by the Regual-Falsi method and the power residual can be calculated using the flow field results of the previous internal CFD calculation. Therefore, whether the internal CFD calculation reaches a quasi-steady state is crucial for the accurate prediction of the gradient
and affects the convergence of the power balance iteration. Unfortunately, numerical oscillation always exists even for the steady-state CFD calculations. Actually considering the calculation cost, the number of the timesteps
for the internal CFD calculation should not be too large. Even if
is large enough, the steady CFD calculation may still have large numerical oscillation due to the instability in calculating the combustion or the stalled compressor. This numerical oscillation makes it difficult to correctly estimate the size and sign (positive or negative) of gradient
.
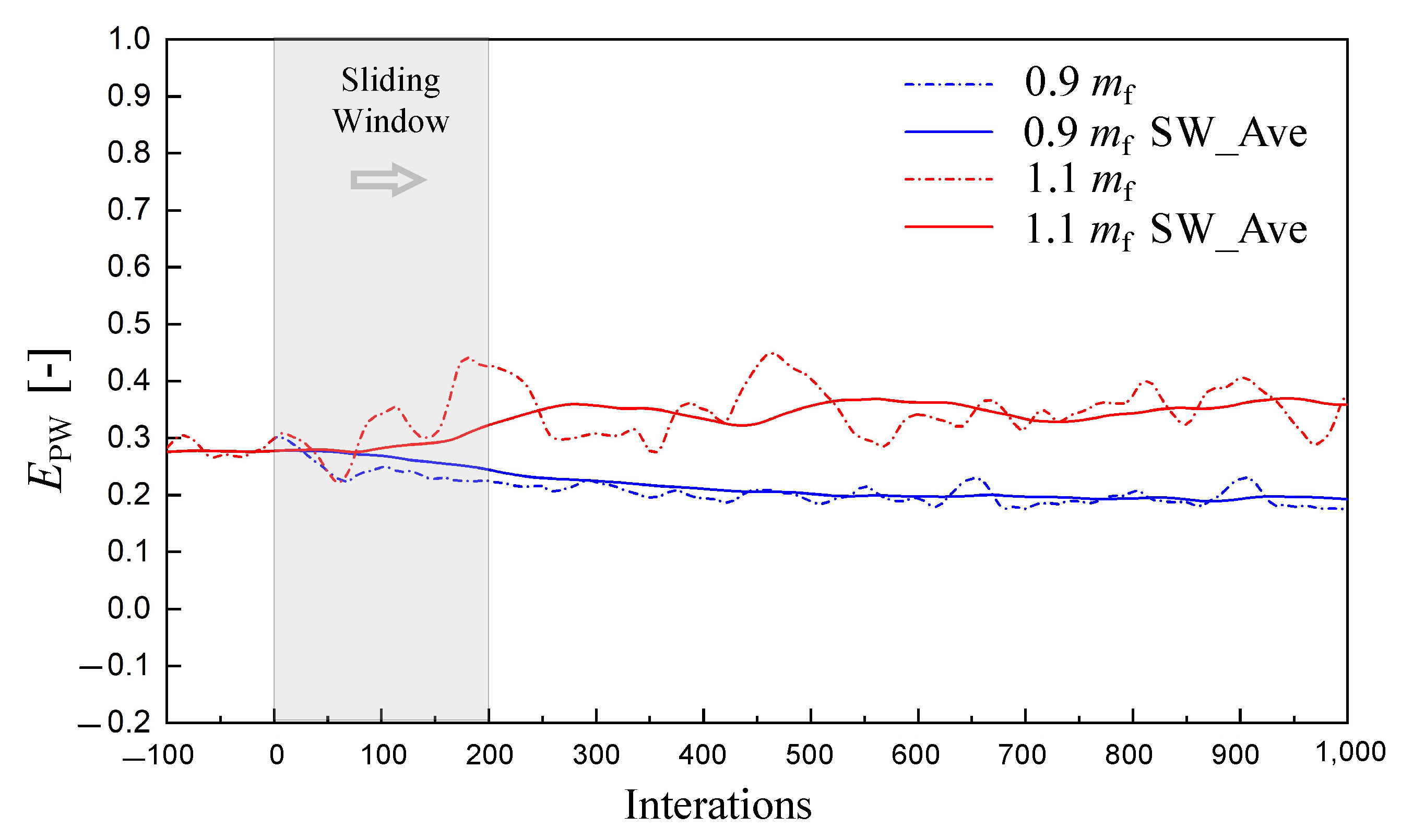
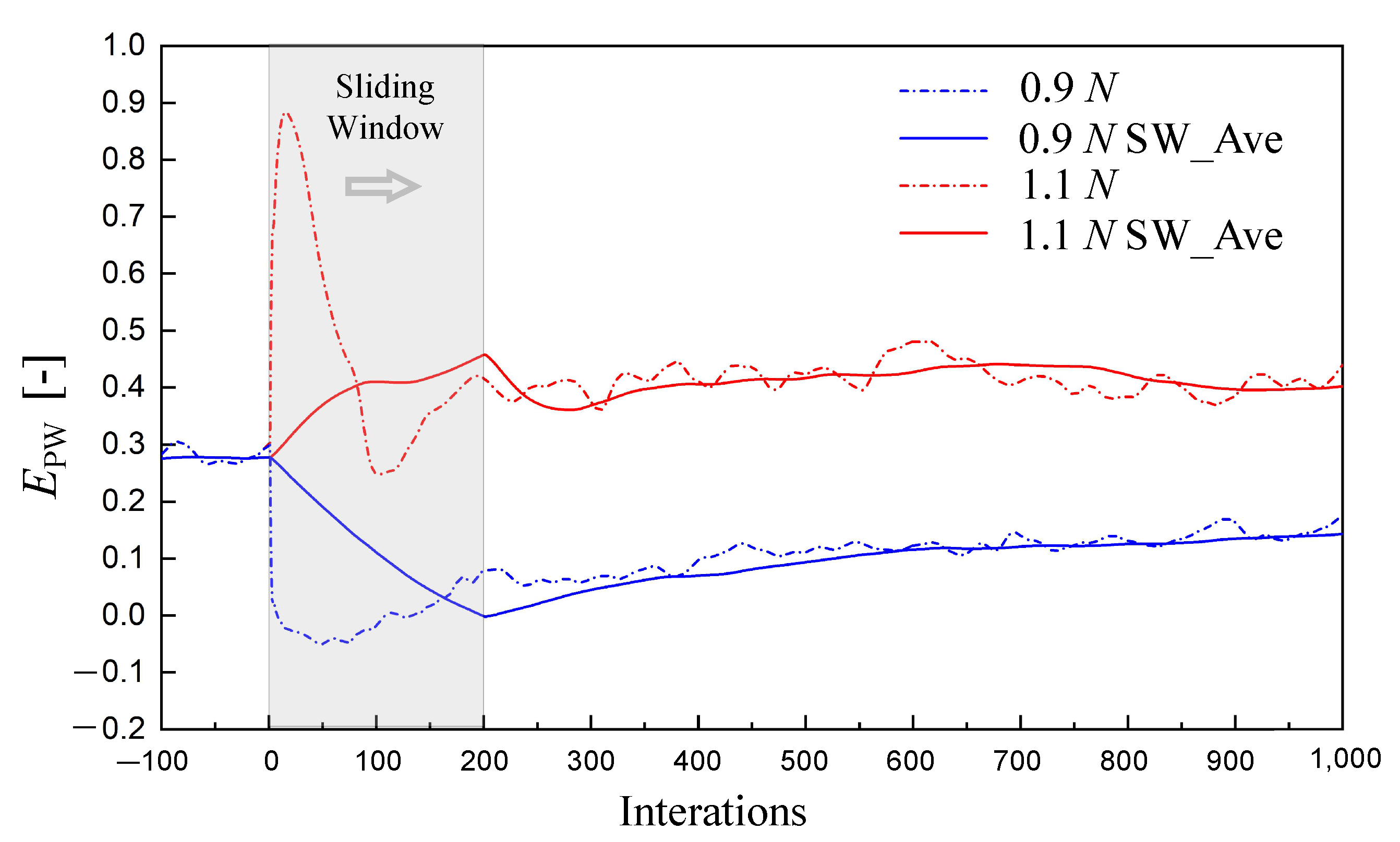
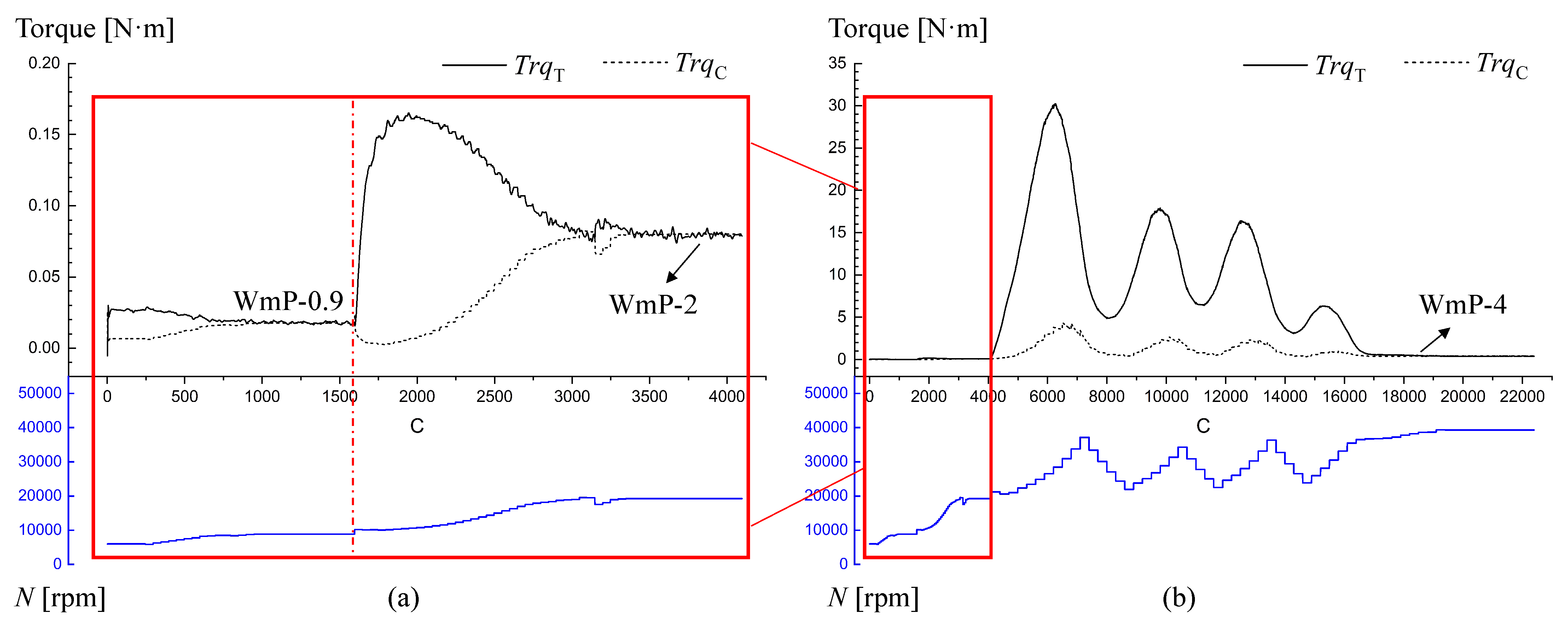
This numerical oscillation can be smoothed by averaging
through a sliding window.
Figure 16 and
Figure 17 show the power residual
obtained by CFD calculation with 10% forced perturbations of the
and
N respectively. The initial field is a quasi-steady state with a rotation speed of 120,000 rpm and a fuel mass flow of 0.0035 kg/s. The dotted line is the calculation result of the steady CFD calculation, and the solid line is the result processed by the sliding window average (window width is 200). With sliding window treatment, the oscillation of the power residual is significantly reduced, which helps to reduce the numerical oscillation of the iterative gradient
and stabilize the calculation.
Moreover, from the above figures, the oscillation of the power residual
caused by changing the rotation speed
N is significantly larger than that caused by changing the fuel mass flow
at the incipient stage. This means that the response of the power residual
to the
N is more sensitive than
in the numerical calculation process. Consistent with that shown in
Figure 15, the change in air mass flow
caused by changing rotation speed
N is significantly larger than that caused by changing fuel mass flow
. As we know, the change in rotation speed can affect the mass flow of the engine rapidly and has a greater impact on all components’ working state. Therefore, it is recommended to use fuel mass flow as the iteration variable
in the power balance iteration to make a numerical stability calculation.
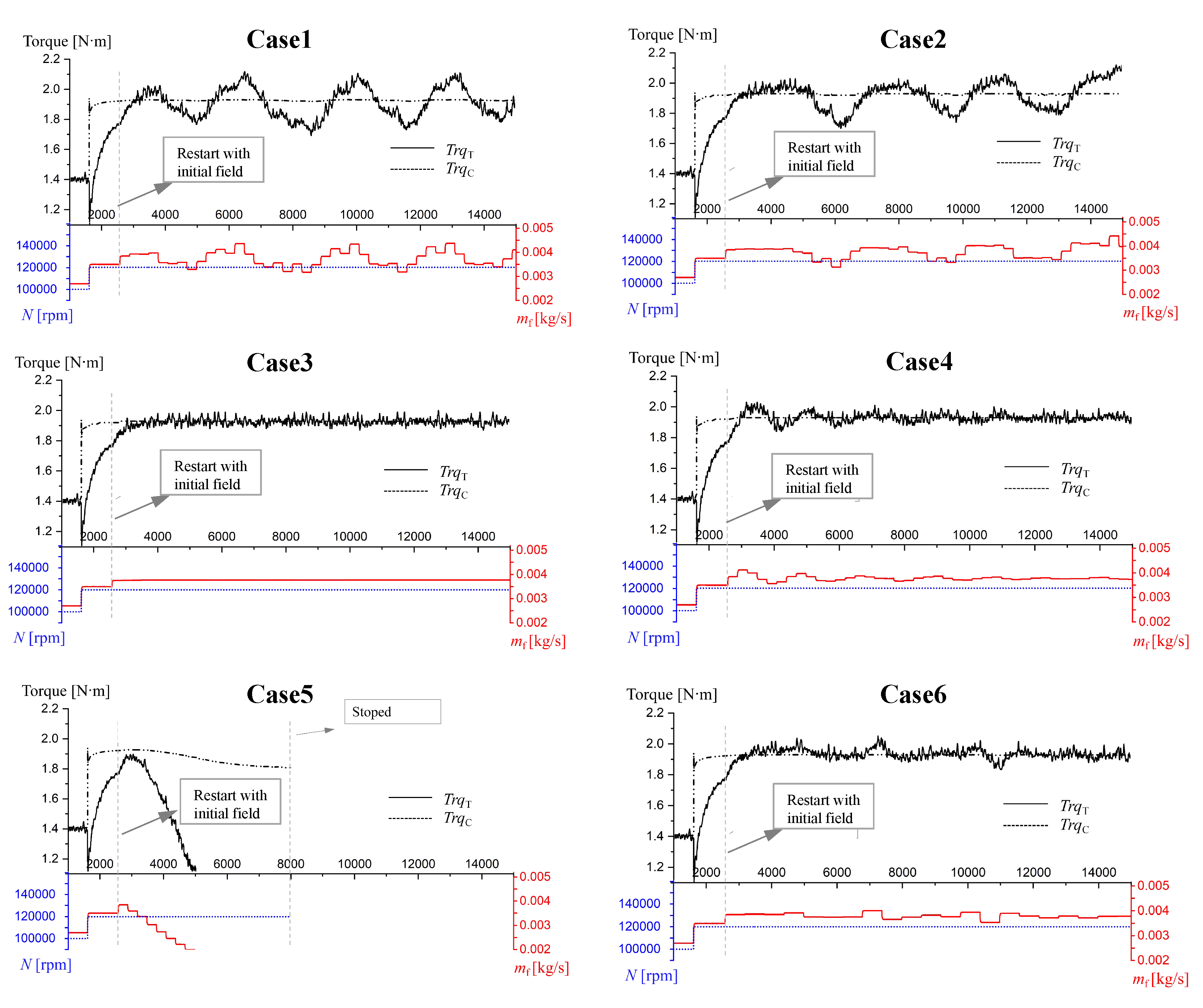
Then, taking
as an example, a series of numerical tests were carried out to illustrate the effects of the relaxation factor
, internal CFD time steps
and gradient
in power residual iteration. The parameter configurations for 6 sets of the numerical tests are shown in
Table 3.
Figure 18 shows the iterative convergence history of power residual
in these 6 tests. All the tests start from the same initial field and are expected to obtain the steady state of the engine at
N = 120,000 rpm by automatically adjusting the fuel mass flow
. The value of the gradient
is given as a constant in Case 4 and Case 5. And for other cases, the gradient is calculated using the Regual Falsi method [
33].
It can be seen that a large internal CFD time step (e.g., Case 6) or a small relaxation factor (e.g., Case 3) will be helpful for the convergence of power residual iteration. For Case 6, the number of the time steps is sufficient to make the aerodynamic parameters converge. And for Case 3, a smaller relaxation factor means that the adjustment step of the iterative variables is small enough to reach a relatively steady state within a smaller number of steps . For both of them, the convergence of power residual iteration is ensured. Considering the efficiency of the iterative calculation, should not be too large and should not be too small. However, it makes the aerodynamic parameters calculated by internal CFD fluctuate wildly and then the power residual iteration may not converge, such as Case 1 and Case 2.
In addition, referring to the analysis conclusion in the
Section 3.2, the gradients
in Case 4 and Case 5 are set to be constant positive and constant negative respectively. The magnitude of the gradient is 200, which is the same as the magnitude reflected in
Figure 15b. Given a positive gradient consistent with that in
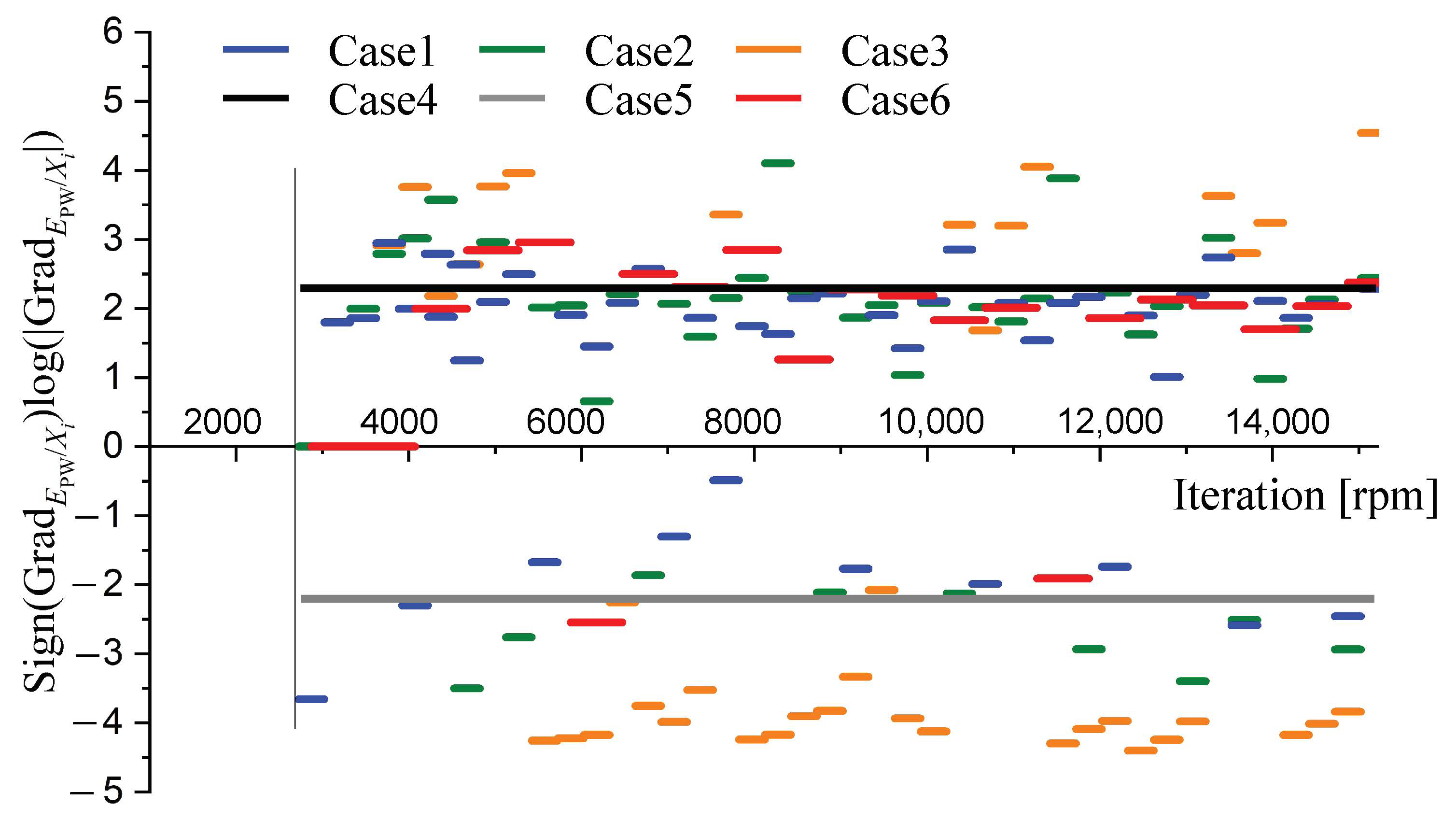
Figure 15b, the power balance iteration can converge stably (e.g., Case 4); however, when the gradient is negative, the iteration diverges very quickly (e.g., Case 5). The gradient
is recorded during the power iteration for the above 6 simulation tests, as shown in
Figure 19. Due to the fluctuations in the numerical calculation, the gradient
parameter may vary over a large range. To observe the value clearly, the logarithm of the gradient
is used as the ordinate in
Figure 19.
When the gradient is basically positive, the power iteration can converge stably, such as Case 4 and Case 6. Otherwise, the power iteration diverges quickly, as in Case 5. When the gradient changes between positive and negative, the power iteration will be oscillated and did not converged, such as Case 1 and Case 2. It is worth noting that, with the smallest relaxation factor in Case 3, the power iteration converges at . Before this, the gradients calculated by the Regual Falsi method are all positive. After convergence, the gradient will oscillate between positive and negative with large amplitude. Actually, this oscillation is caused by the very small adjustment step of the iterative variable , which is close to 0. As it is very small, the oscillation of the gradient will not cause the oscillation of the power balance iteration.
Although the aerodynamic parameters in the gas turbine engine are highly nonlinear, the characteristic parameters for typical steady states have certain local linear relationships. This is the reason why the gradient calculated by the Regual Falsi method can maintain its sign. In some extreme states, this local linear relationship may not exist. For example, if the fuel supply is greatly increased, the engine will work in an oil-rich combustion state. The combustion efficiency of the combustion chamber will be significantly reduced. Then the linear relationship between the power residual and the fuel mass flow will no longer exist.
Based on the above analysis, three strategies for power balance iteration are proposed:
Strategy I: Using the sliding window average to relieve the oscillation of the CFD simulation results, which improves the convergence of the external power balance iteration;
Strategy II: Considering the local linearity of the power residual and the iteration variable , the signs of the gradient can be fixed, which can increase the stability of the iterative calculation;
Strategy III: It is recommended to take the fuel mass flow as the iteration variable , which will not lead to the drastic fluctuations of the engine state and make the calculation more stable.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}