
Adaptive Control of Mini Space Robot Based on Linear Separation of Inertial Parameters


Abstract
1. Introduction
2. Modeling of Mini Space Robotic System
2.1. Problem Description
2.2. Kinematics and Dynamics
2.2.1. Calculation of System’s Centroid Position
2.2.2. Kinematics of Spacecraft Base
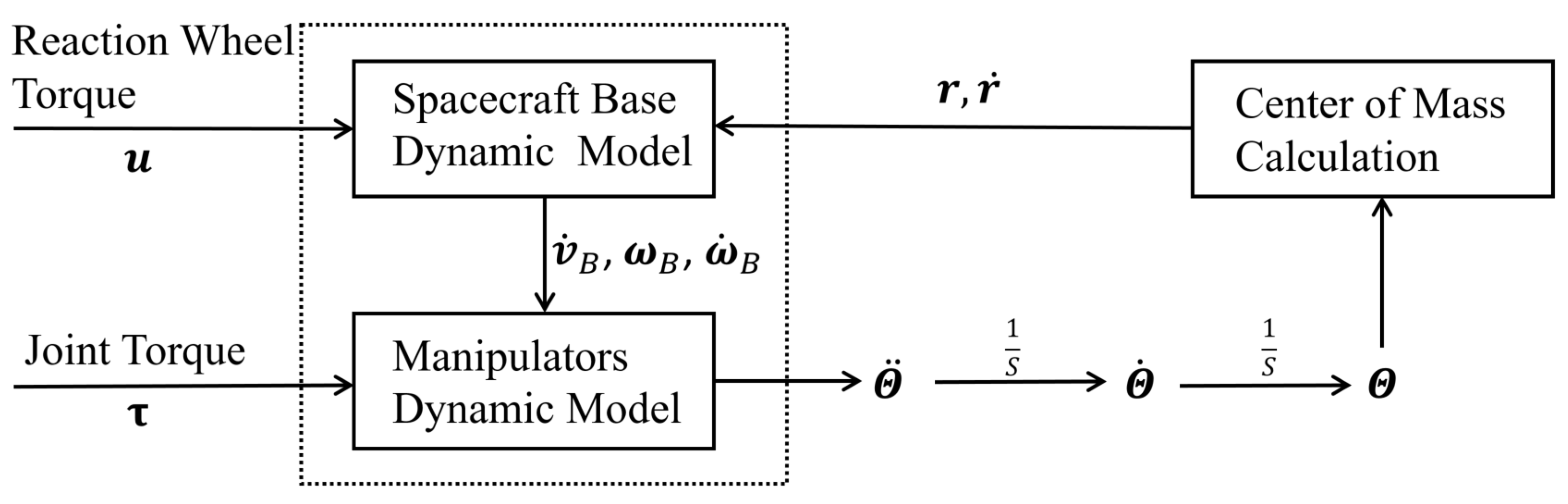
2.2.3. Manipulator Chain Dynamics
3. Design of Parameter Adaptive Controller
3.1. Adaptive Controller Design
3.2. Correction and Update of Inertial Parameters
3.2.1. Recursive Least-Squares Method
3.2.2. Parameter Update Based on Lyapunov’s Method
4. Numerical Simulation
4.1. Influence of Prior Inertia Parameters on Controller Performance
4.2. Influence of Weight Coefficient on Controller Performance
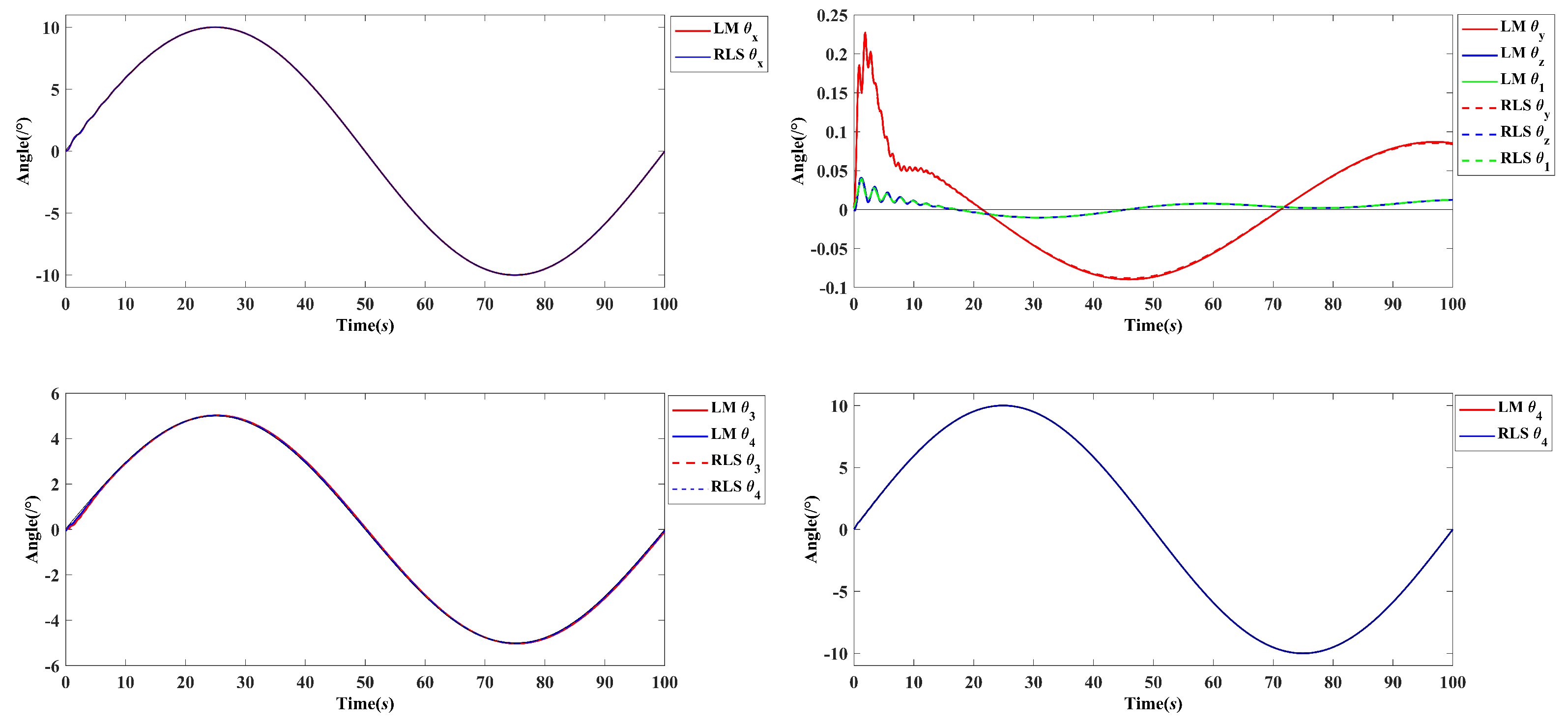
4.3. Inertial Parameter Update Using Recursive Least Square Method and Lyapunov Methods
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
References
- Nakasuka, S.; Miyata, K.; Tsuruda, Y.; Aoyanagi, Y.; Matsumoto, T. Discussions on attitude determination and control system for micro/nano/pico-satellites considering survivability based on Hodoyoshi-3 and 4 experiences. Acta Astronaut. 2018, 145, 75–174. [Google Scholar] [CrossRef]
- Zhang, X.; Liu, J.; Tong, Y.; Liu, Y.; Ju, Z. Attitude Decoupling Control of Semifloating Space Robots Using Time-Delay Estimation and Supertwisting Control. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 4280–4295. [Google Scholar] [CrossRef]
- Jin, R.; Rocco, P.; Chen, X.; Geng, Y. LPV-Based Offline Model Predictive Control for Free-Floating Space Robots. IEEE Trans. Aerosp. Electron. Syst. 2021, 57, 3896–3904. [Google Scholar] [CrossRef]
- Chu, X.; Hu, Q.; Zhang, J. Path Planning and Collision Avoidance for a Multi-Arm Space Maneuverable Robot. IEEE Trans. Aerosp. Electron. Syst. 2021, 54, 217–232. [Google Scholar] [CrossRef]
- Virgili-Llop, J.; Drew, J.V.; Zappulla, I.R.; Romano, M. Laboratory experiments of resident space object capture by a spacecraft–manipulator system-ScienceDirect. Aerosp. Sci. Technol. 2017, 71, 530–545. [Google Scholar] [CrossRef]
- Jorgensen, G.; Bains, E. SRMS History, Evolution and Lessons Learned. In Proceedings of the AIAA SPACE 2011 Conference & Exposition, Long Beach, CA, USA, 27–29 September 2011. [Google Scholar]
- Landzettel, K. MSS Ground Control Demo with MARCO. In Proceedings of the 6th International Symposium on Artificial Intelligence, Robotics and Automation in Space: iSAIRAS 2001, Montreal, QC, Canada, 18–21 June 2001. [Google Scholar]
- Stieber, E.M.; Hunter, G.D.; Abramovici, A. Overview of the Mobile Servicing System for the International Space Station. Artif. Intell. Robot. Autom. Space 1999, 440, 37–42. [Google Scholar]
- Stieber, M.F.; Trudel, C.P.; Hunter, D.G. Robotic systems for the International Space Station. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; pp. 3068–3073. [Google Scholar]
- Sasiadek, J.Z. Space robotics and manipulators—The past and the future. Control Eng. Pract. 1994, 2, 491–497. [Google Scholar] [CrossRef]
- Piedboeuf, J.C.; Carufel, J.D.; Aghili, F.; Dupuis, E. Task verification facility for the Canadian special purpose dextrous manipulator. In Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 2002; pp. 1077–1083. [Google Scholar]
- Wanga, X.; Shi, L.; Katupitiya, J. Coordinated Control of a Dual-arm Space Robot to Approach and Synchronise with the Motion of a Spinning Target in 3D Space. Acta Astronaut. 2020, 176, 99–110. [Google Scholar] [CrossRef]
- Moghaddam, B.M.; Chhabra, R. On the guidance, navigation and control of in-orbit space robotic missions: A survey and prospective vision. Acta Astronaut. 2021, 184, 70–100. [Google Scholar] [CrossRef]
- Yoji, U.; Yoshida, K. Resolved motion rate control of space manipulators with generalized Jacobian matrix. IEEE Trans. Robot. Autom. 1989, 5, 303–314. [Google Scholar]
- Nenchev, D.; Umetani, Y.; Yoshida, K. Analysis of a Redundant Free-Flying Spacecraft/Manipulator System. IEEE Trans. Robot. Autom. 1992, 8, 1–6. [Google Scholar] [CrossRef]
- Dubowsky, S.; Papadopoulos, E. The kinematics, dynamics, and control of free-flying and free-floating space robotic systems. Robot. Autom. IEEE Trans. 1993, 9, 531–542. [Google Scholar] [CrossRef]
- Liang, B.; Xu, Y.; Bergerman, M. Mapping a space manipulator to a dynamically equivalent manipulator. J. Dyn. Syst. Meas. Control 1998, 120, 1–7. [Google Scholar] [CrossRef]
- Yoshida, K.; Kurazume, R.; Umetani, Y. Dual arm coordination in space free-flying robot. In Proceedings of the ICRA, Sacramento, CA, USA, 9–11 April 1991. [Google Scholar]
- Papadopoulos, E.; Moosavian, S. Dynamics and control of multi-arm space robots during chase and capture operations. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Munich, Germany, 12–16 September 1994. [Google Scholar]
- Yang, S.; Zhang, Y.; Chen, T.; Wen, H.; Jin, D. Assembly Strategy for Modular Components Using a Dual-Arm Space Robot with Flexible Appendages. Aerospace 2022, 9, 819. [Google Scholar] [CrossRef]
- Walker, M.W.; Wee, L.B. Adaptive control of space-based robot manipulators. Robot. Autom. IEEE Trans. 1991, 7, 828–835. [Google Scholar] [CrossRef][Green Version]
- Wee, L.B.; Walker, M.W.; Mcclamroch, N.H. An articulated-body model for a free-flying robot and its use for adaptive motion control. Robot. Autom. IEEE Trans. 1997, 13, 264–277. [Google Scholar]
- Liu, D.; Chen, L. Space Robot On-Orbit Operation of Insertion and Extraction Impedance Control Based on Adaptive Neural Network. Aerospace 2023, 10, 466. [Google Scholar] [CrossRef]
- Wu, X.; Zhao, H.; Huang, B.; Li, J.; Liu, R. Minimum-learning-parameter-based anti-unwinding attitude tracking control for spacecraft with unknown inertia parameters. Acta Astronaut. 2021, 179, 498–508. [Google Scholar] [CrossRef]
- Ls, A.; He, Y.B.; Ms, C.; Qg, D.; Xin, J.A. Robust control of a space robot based on an optimized adaptive variable structure control method. Aerosp. Sci. Technol. 2022, 120, 107267. [Google Scholar]
- Xu, W.; Hu, Z.; Zhang, Y.; Liang, B. On-orbit identifying the inertia parameters of space robotic systems using simple equivalent dynamics. Acta Astronaut. 2017, 132, 131–142. [Google Scholar] [CrossRef]
- Nabavi-Chashmi, S.Y.; Malaek, M.B. On the identifiability of inertia parameters of planar Multi-Body Space Systems. Acta Astronaut. 2018, 145, 199–215. [Google Scholar] [CrossRef]
- Ma, O. On-Orbit Identification of Inertia Properties of Spacecraft Using Robotics Technology. 2006. Available online: https://www.researchgate.net/publication/235063328_On-Orbit_Identification_of_Inertia_Properties_of_Spacecraft_using_Robotics_Technology (accessed on 24 June 2023).
- Nainer, C.; Garnier, H.; Gilson, M.; Evain, H.; Pittet, C. Parameter estimation of a gyroless micro-satellite from telemetry data. Control Eng. Pract. 2022, 123, 105–134. [Google Scholar] [CrossRef]
- Nuthi, P.; Subbarao, K. Computational adaptive optimal control of spacecraft attitude dynamics with inertia matrix identification. In Proceedings of the American Control Conference, Boston, MA, USA, 6–8 July 2016. [Google Scholar]
- Chang, H.; Huang, P.; Lu, Z.; Zhang, Y.; Meng, Z.; Liu, Z. Inertia Parameters Identification for Cellular Space Robot through Interaction. Aerosp. Sci. Technol. 2017, 71, 464–474. [Google Scholar] [CrossRef]
- Yao, X.; Gang, T.; Ma, Y.; Qi, R. An adaptive actuator failure compensation scheme for spacecraft with unknown inertia parameters. In Proceedings of the Decision & Control, Maui, HI, USA, 10–13 December 2012. [Google Scholar]
- Lei, R.H.; Chen, L. Adaptive fault-tolerant control based on boundary estimation for space robot under joint actuator faults and uncertain parameters. Def. Technol. 2019, 5, 964–971. [Google Scholar] [CrossRef]
- Huang, P.; Wang, M.; Meng, Z.; Zhang, F.; Liu, Z. Attitude takeover control for post-capture of target spacecraft using space robot. Aerosp. Sci. Technol. 2016, 51, 171–180. [Google Scholar] [CrossRef]
- Palma, P.; Seweryn, K.; Rybus, T. Impedance Control Using Selected Compliant Prismatic Joint in a Free-Floating Space Manipulator. Aerospace 2022, 9, 406. [Google Scholar] [CrossRef]
- Ulrich, S.; Sasiadek, J.Z.; Barkana, I. Nonlinear adaptive output feedback control of flexible-joint space manipulators with joint stiffness uncertainties. J. Guid. Control Dyn. 2014, 37, 1961–1975. [Google Scholar] [CrossRef]
- Marchionne, C.; Sabatini, M.; Gasbarri, P. GNC architecture solutions for robust operations of a free-floating space manipulator via image based visual servoing. Acta Astronaut. 2021, 180, 218–231. [Google Scholar] [CrossRef]
- Liu, Y.; Jin, Z.; Teng, L. PSO-Based Time Optimal Rapid Orientation for Micronano Space Robot. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 1921–1934. [Google Scholar] [CrossRef]
- Zhang, X.; Ling, K.; Lu, Z.; Zhang, X.; Liao, W.; Lim, W. Piece-wise affine MPC-based attitude control for a CubeSat during orbital manoeuvres. Aerosp. Sci. Technol. 2021, 118, 106997. [Google Scholar] [CrossRef]
- Oestreich, C.E.; Linares, R.; Gondhalekar, R. Tube-Based Model Predictive Control with Uncertainty Identification for Autonomous Spacecraft Maneuvers. J. Guid. Control Dyn. 2023, 46, 6–20. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | ||||||
|---|---|---|---|---|---|---|
| Mass (kg) | 131.734 | 2.082 | 24.569 | 25.280 | 134.078 | |
| (m) | −0.045 | 0 | 0.496 | 0.500 | 0.149 | |
| 0.101 | 0 | 0 | 0 | 0 | ||
| −0.061 | 0.035 | 0 | 0 | 0 | ||
| 7.610 | 0.003 | 0.017 | 0.017 | 36.254 | ||
| 11.721 | 0.003 | 1.949 | 2.090 | 18.637 | ||
| 11.404 | 0.002 | 1.959 | 2.101 | 18.637 | ||
| −1.773 | 0 | 0 | 0 | 0 | ||
| 1.799 | 0 | 0 | 0 | 0 | ||
| 0.652 | 0 | 0 | 0 | 0 | ||
| Twist angle (rad) | 0 | 0 | 0 | 0 | ||
| Length of links (m) | 0.320 | 0.056 | 1.000 | 1.000 | 0 | |
| Offset of links links (m) | 0 | 0 | 0 | 0 | 0 | |
| Joint angle (rad) |
| Calculation Method | Calculation Time(s) | |||
|---|---|---|---|---|
| Mean | Var | Max | Min | |
| RLS | 3.202 | 7.736 | 22.63 | 2.187 |
| LM | 2.440 | 1.325 | 6.405 | 1.832 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Teng, L.; Jin, Z. Adaptive Control of Mini Space Robot Based on Linear Separation of Inertial Parameters. Aerospace 2023, 10, 679. https://doi.org/10.3390/aerospace10080679
Liu Y, Teng L, Jin Z. Adaptive Control of Mini Space Robot Based on Linear Separation of Inertial Parameters. Aerospace. 2023; 10(8):679. https://doi.org/10.3390/aerospace10080679
Chicago/Turabian StyleLiu, Yuchen, Lai Teng, and Zhonghe Jin. 2023. "Adaptive Control of Mini Space Robot Based on Linear Separation of Inertial Parameters" Aerospace 10, no. 8: 679. https://doi.org/10.3390/aerospace10080679
APA StyleLiu, Y., Teng, L., & Jin, Z. (2023). Adaptive Control of Mini Space Robot Based on Linear Separation of Inertial Parameters. Aerospace, 10(8), 679. https://doi.org/10.3390/aerospace10080679