
Fluid–Structure Coupling and Aerodynamic Performance of a Multi-Dimensional Morphing Wing with Flexible Metastructure Skin


Abstract
1. Introduction
2. Design of the MWS Mechanism and Metastructure Flexible Skin
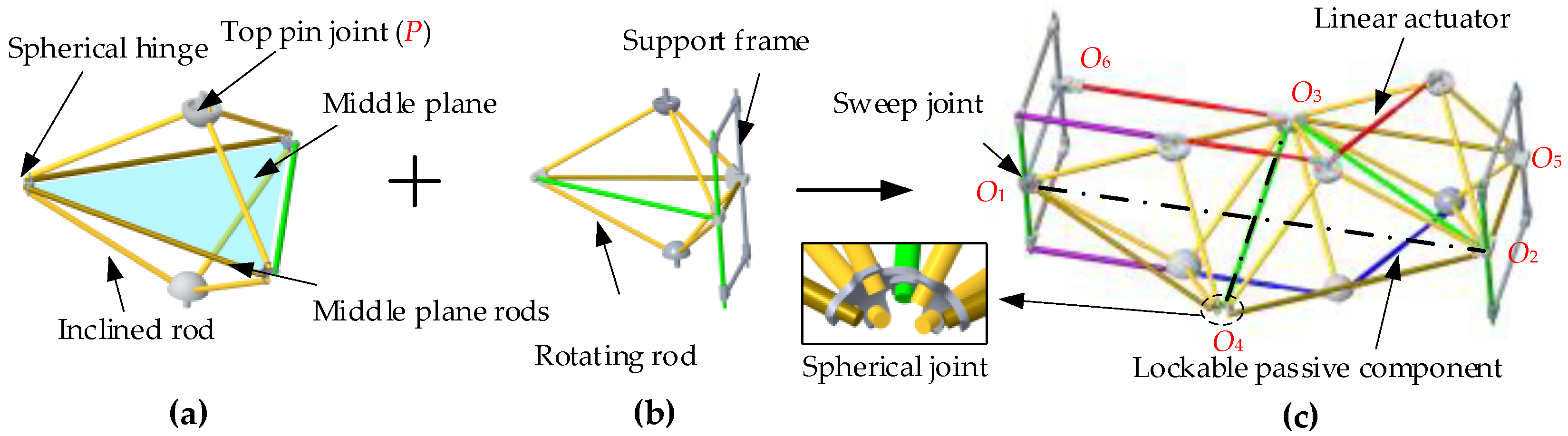
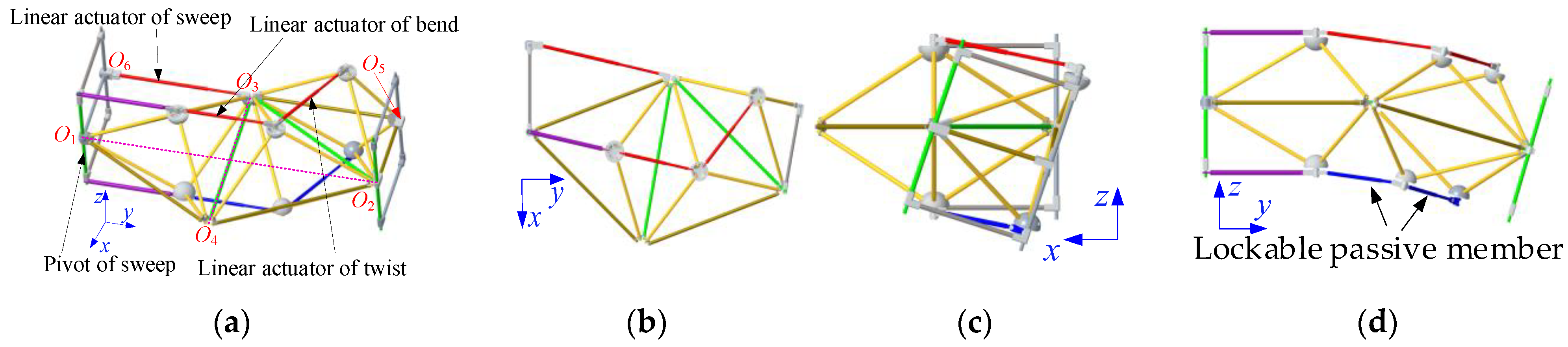
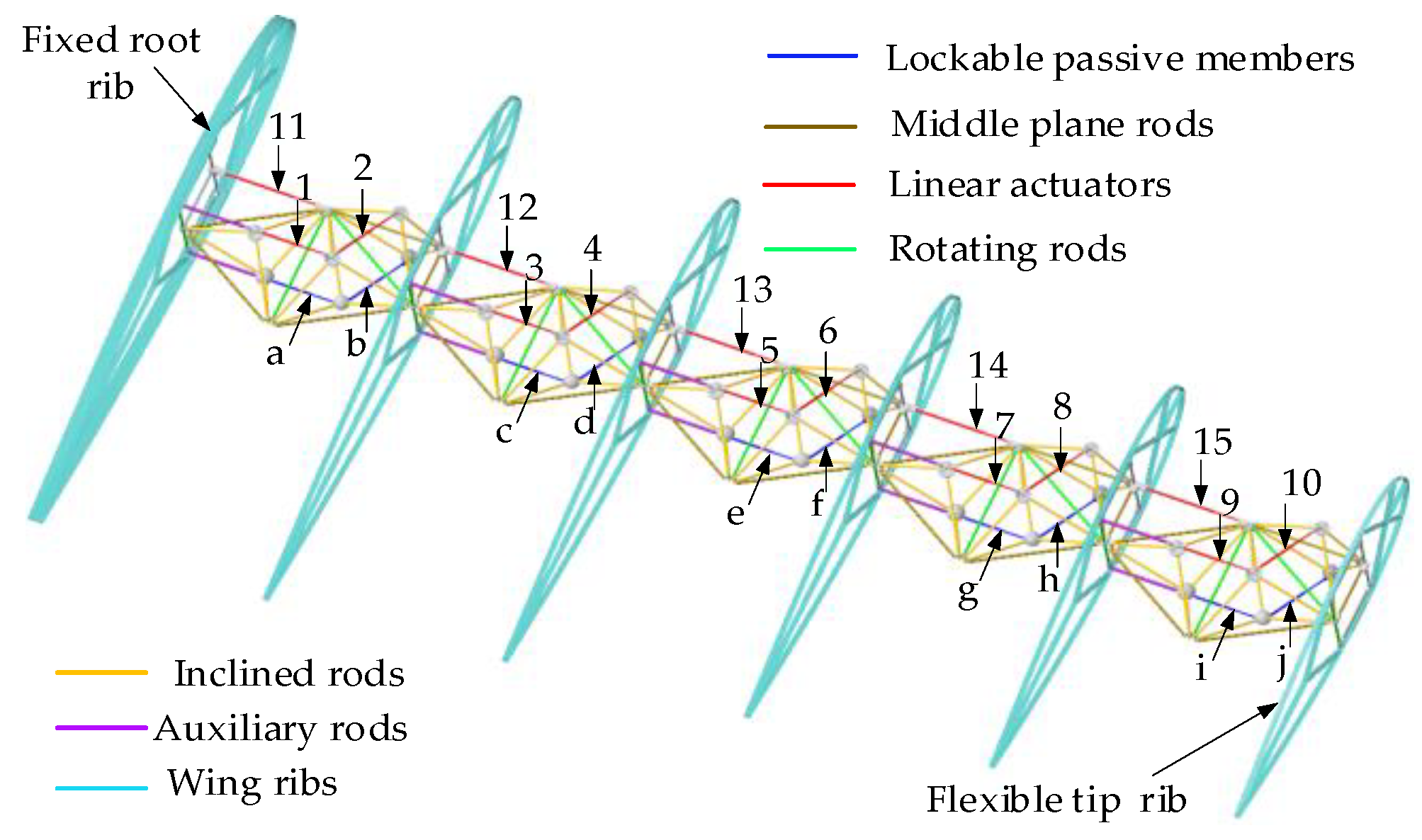
2.1. Structure Design of the MWS Mechanism
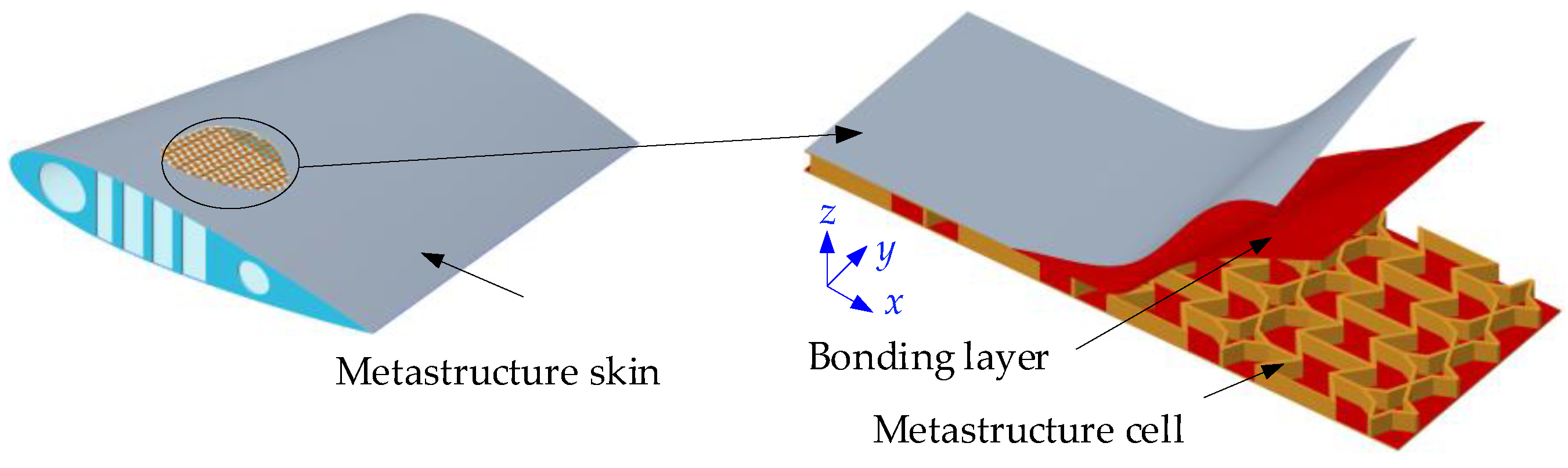
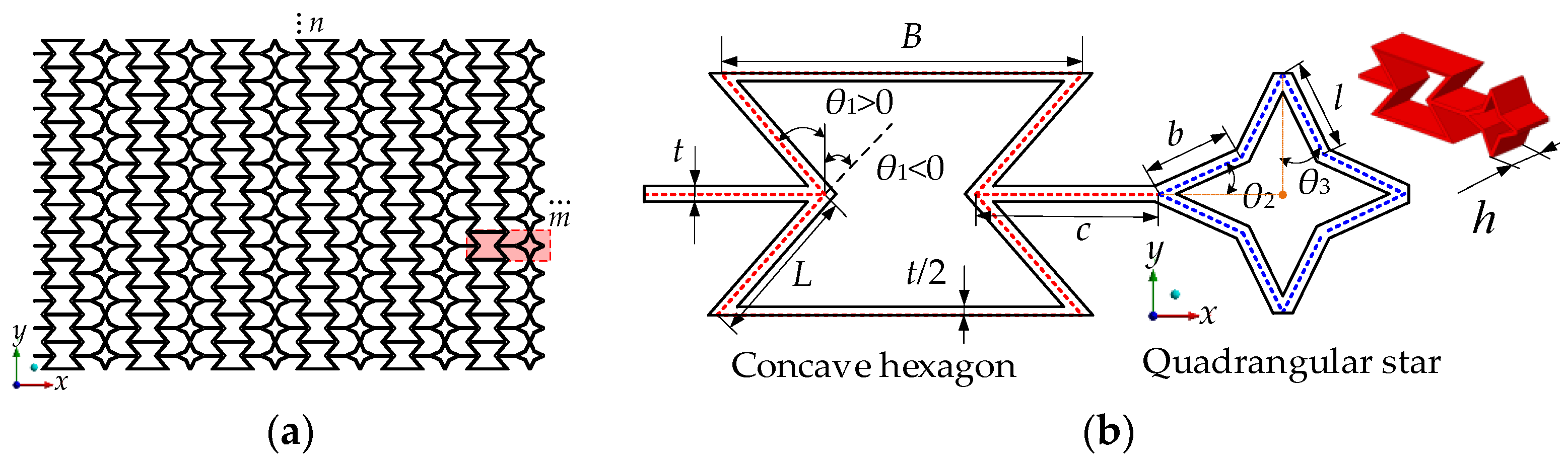
2.2. Design and Analysis of Skin Mechanical Characteristics
3. Fluid–Structure Coupling Analysis of Morphing Wing
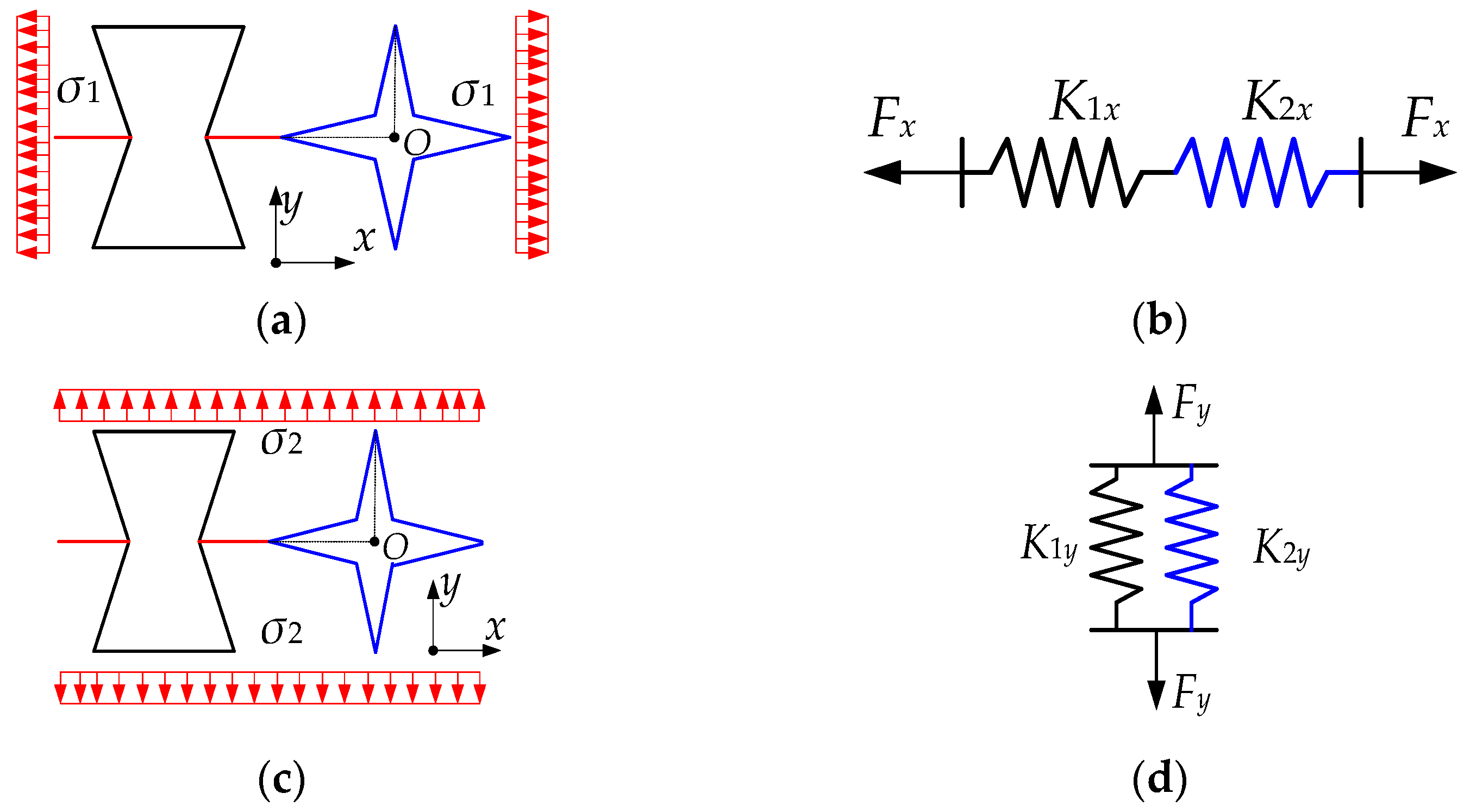
3.1. Equivalent Model of Metastructure Skin
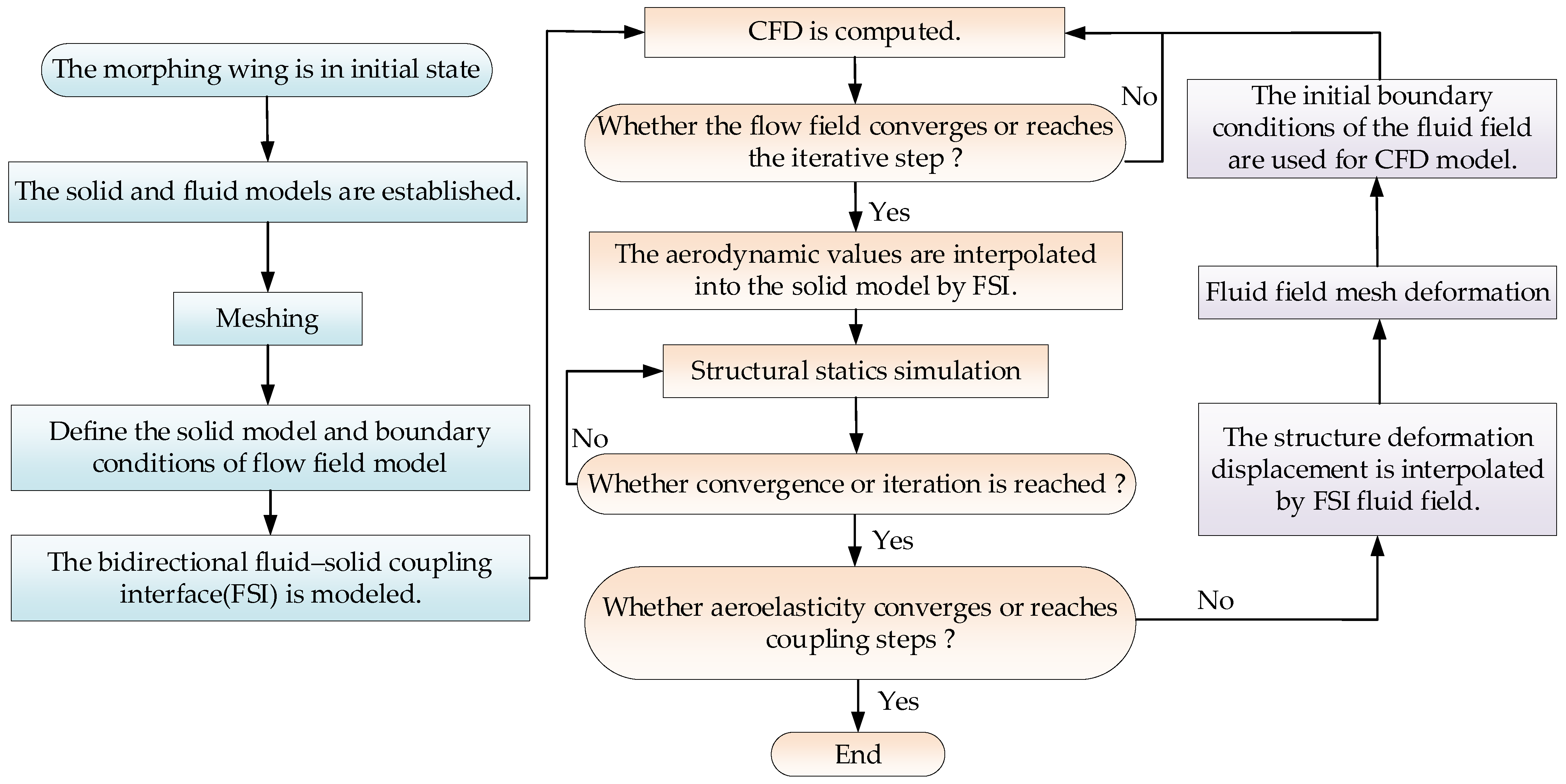
3.2. Bidirectional Fluid–Structure Coupling Analysis of the Morphing Wing
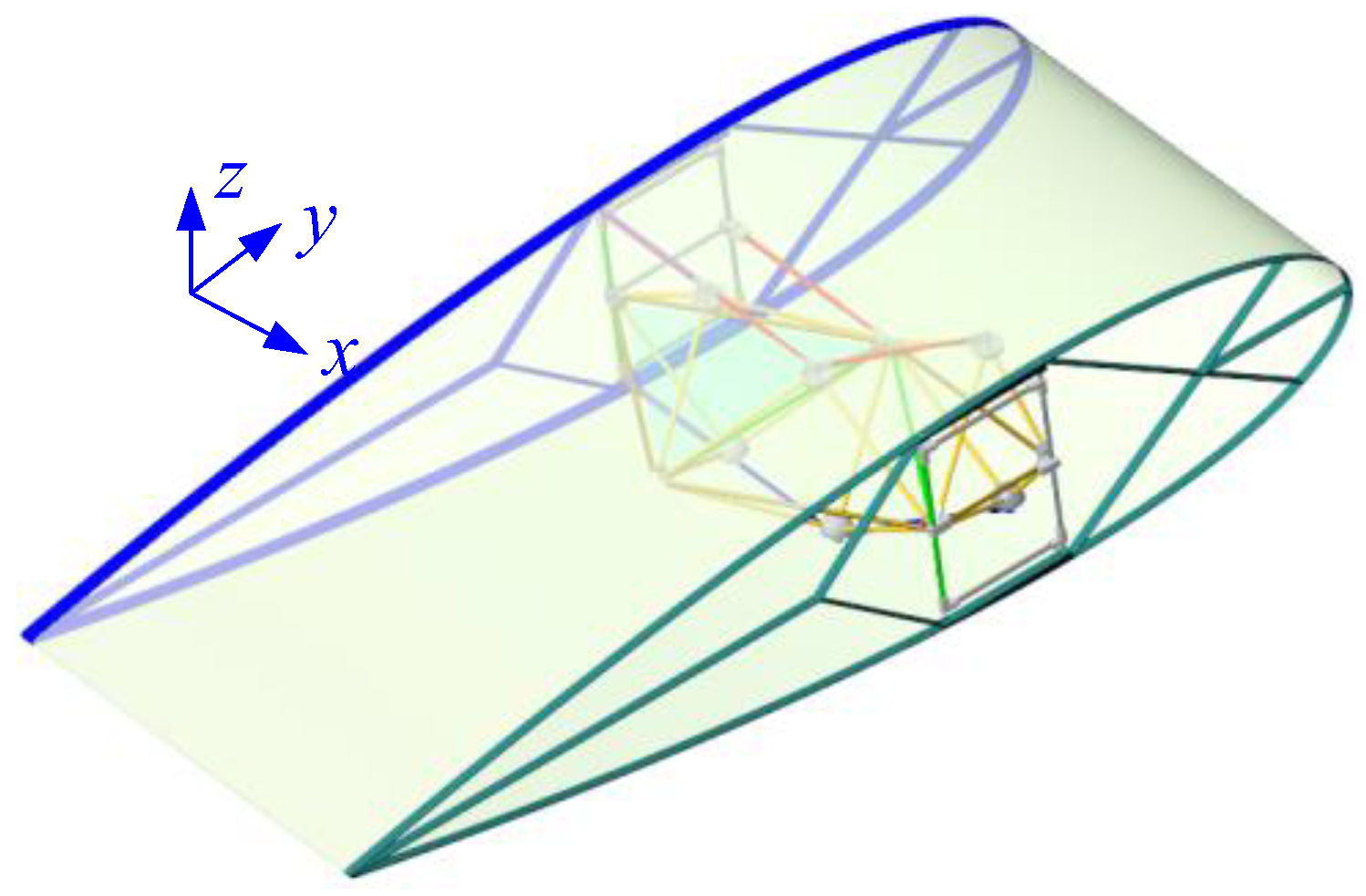
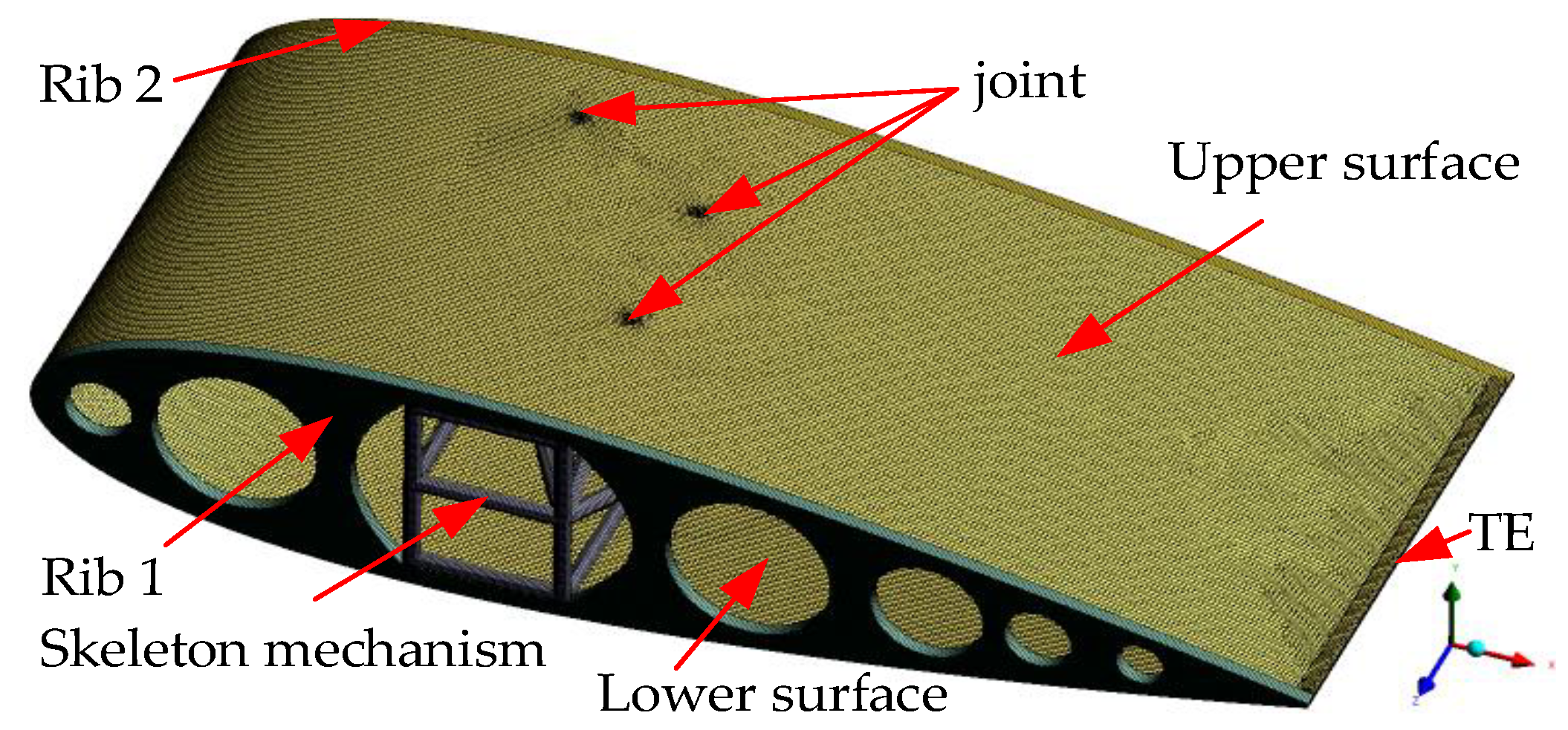
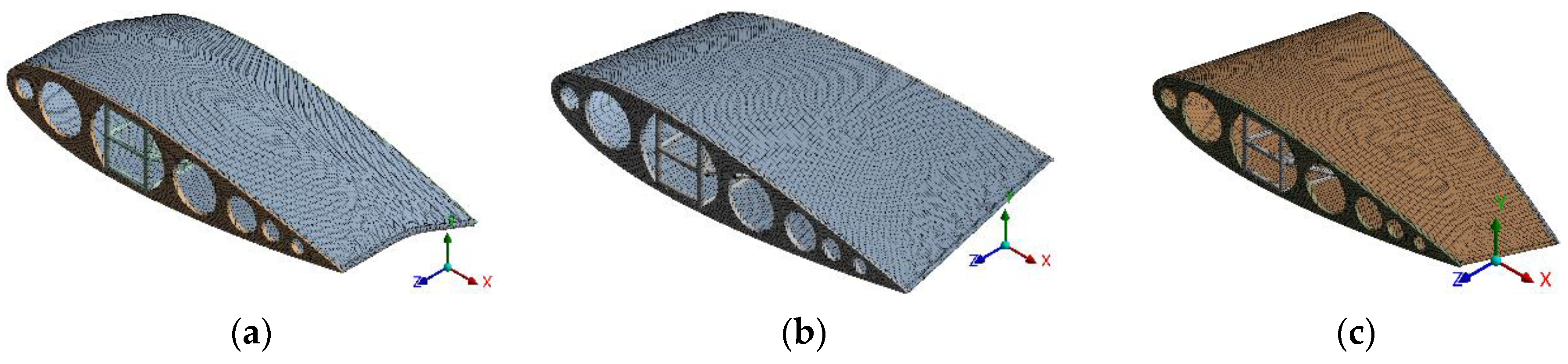
3.2.1. Morphing Wing FEM Model
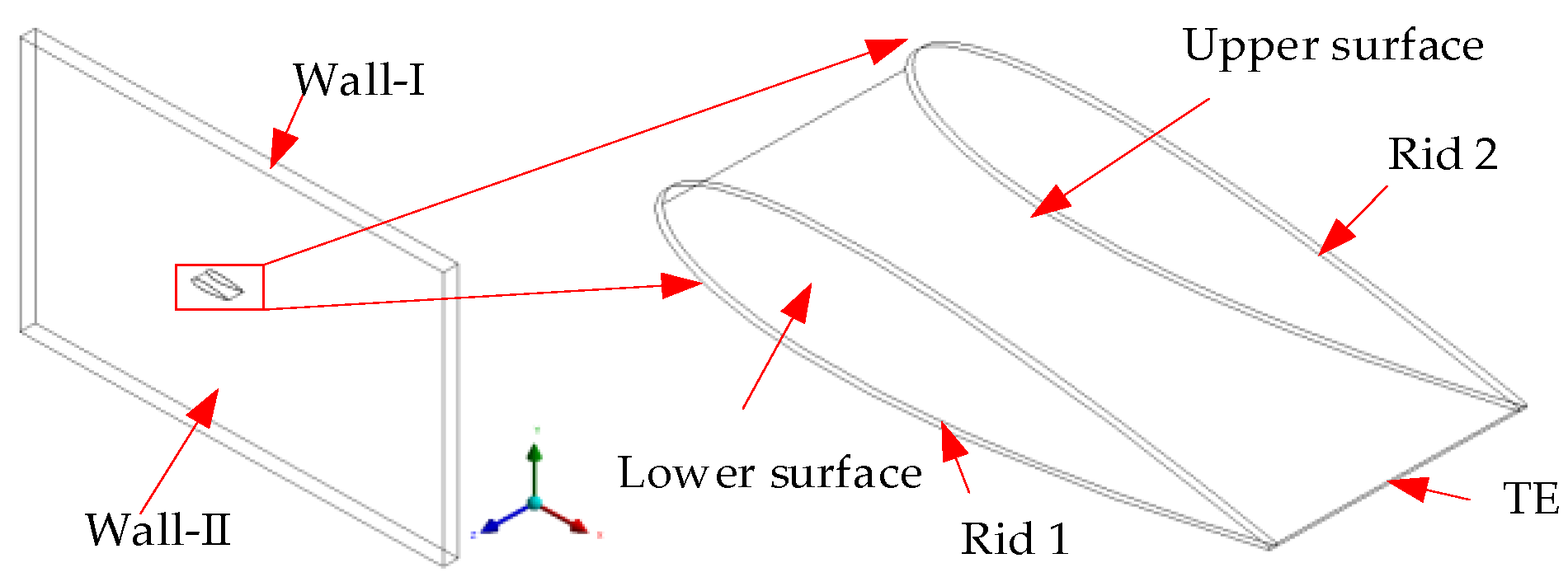
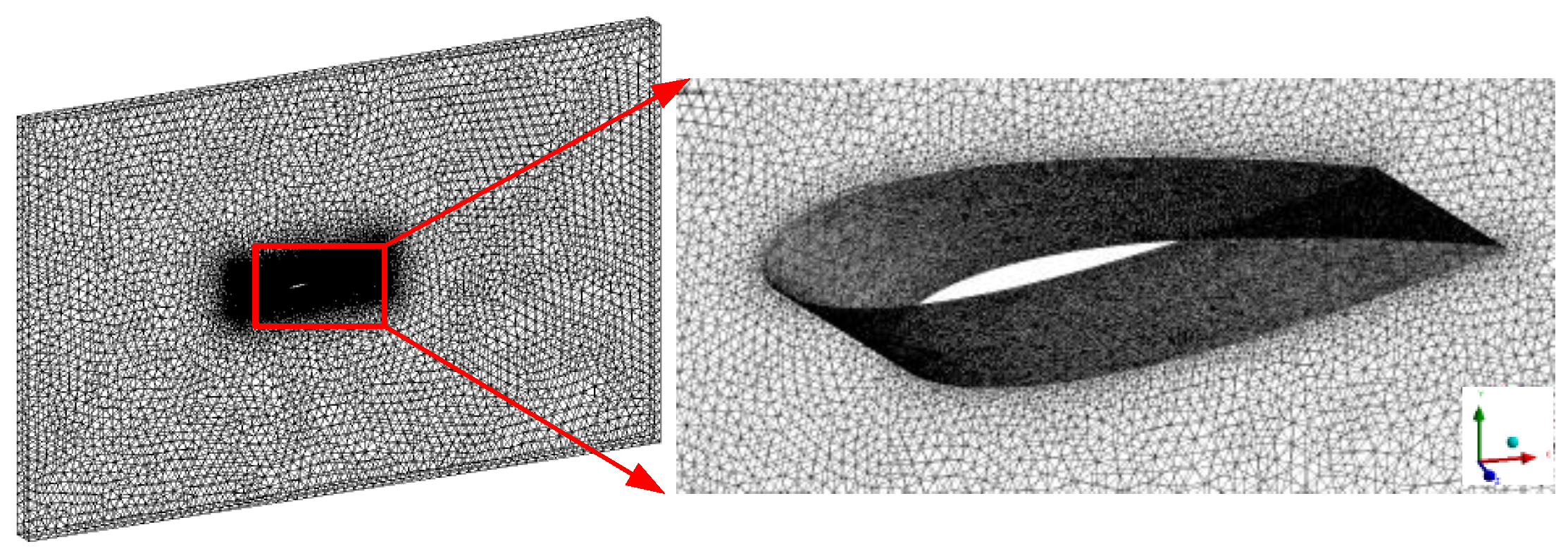
3.2.2. Morphing Wing CFD Fluid Model
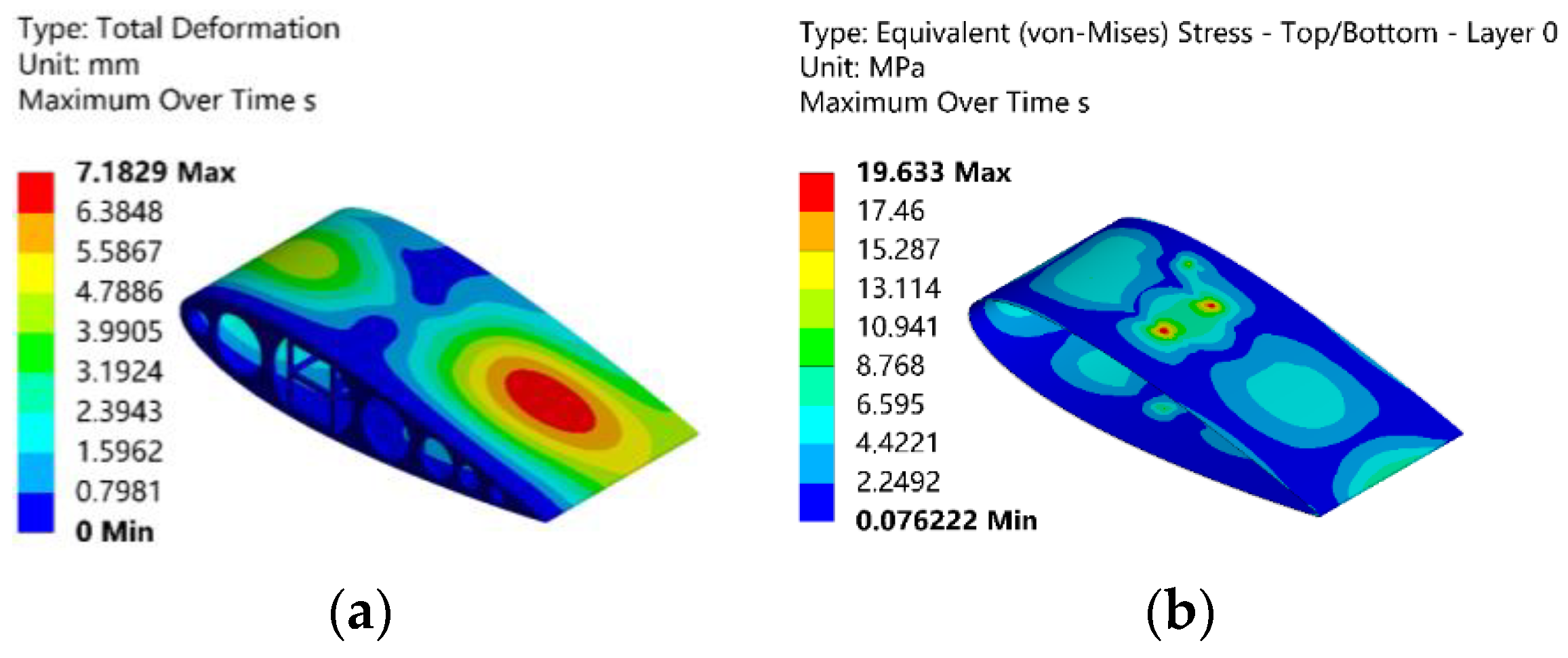
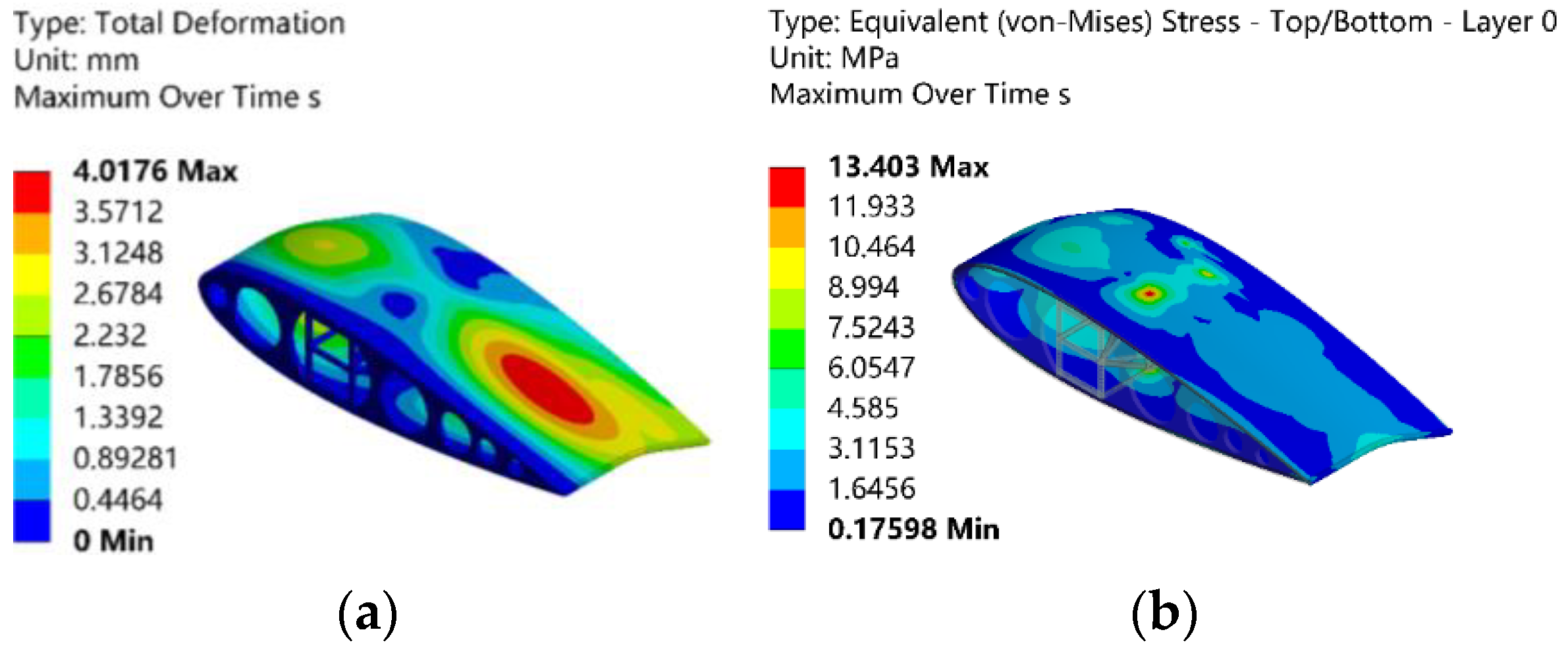
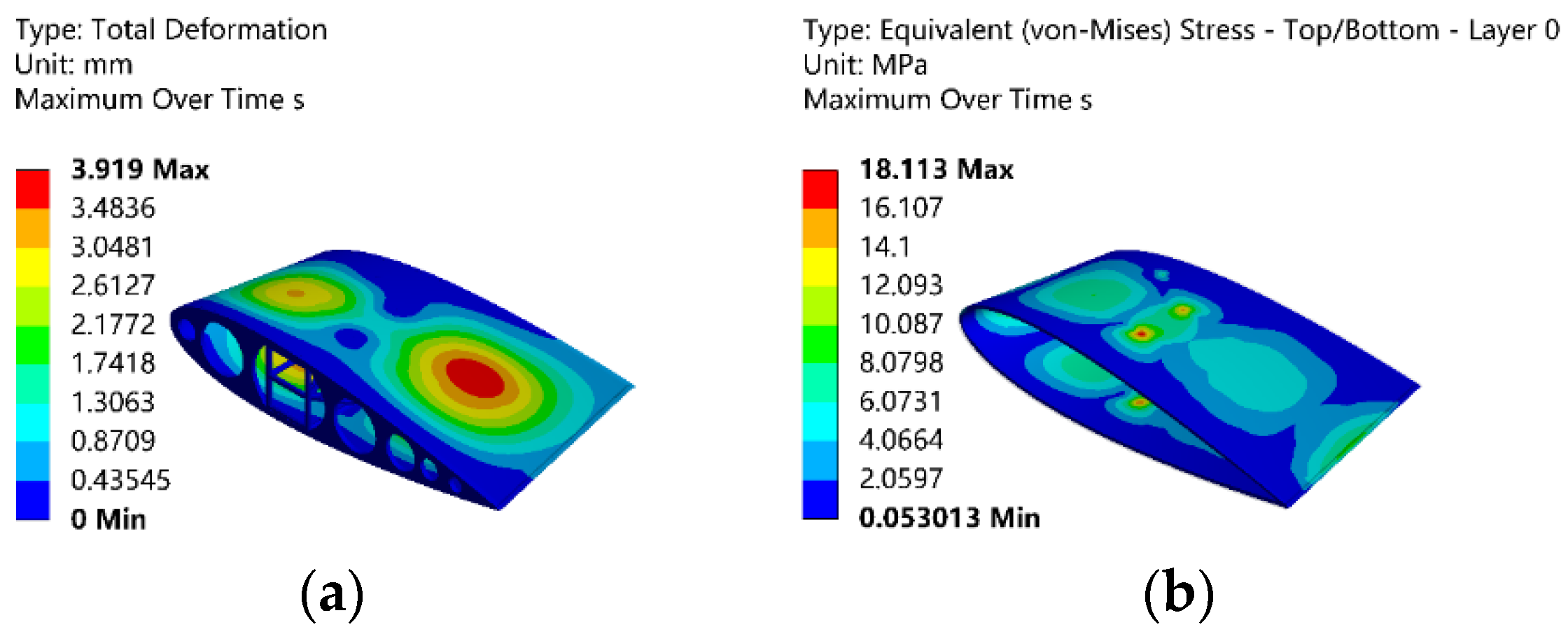
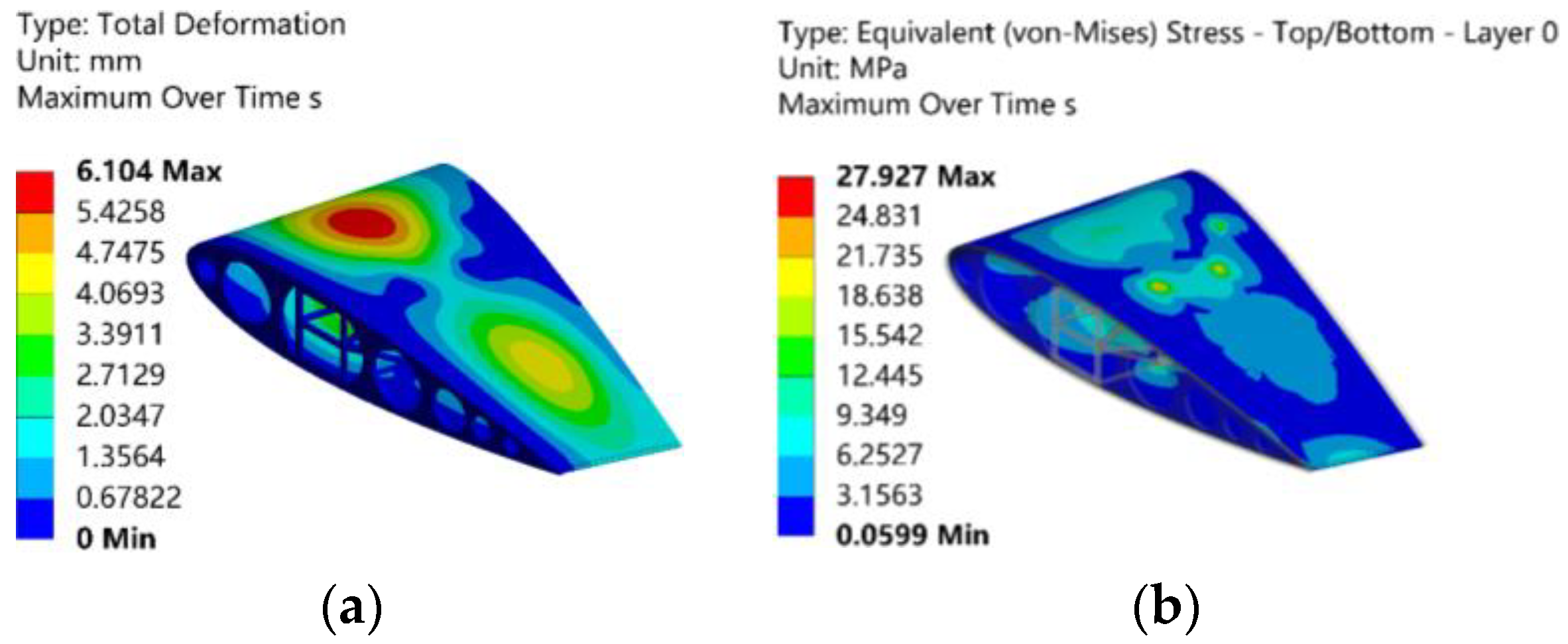
3.2.3. Discussion of Fluid–Structure Coupling Analysis
4. Aerodynamic Characteristics of the Morphing Wing
4.1. Influence of the Deformed State on Aerodynamic Characteristics
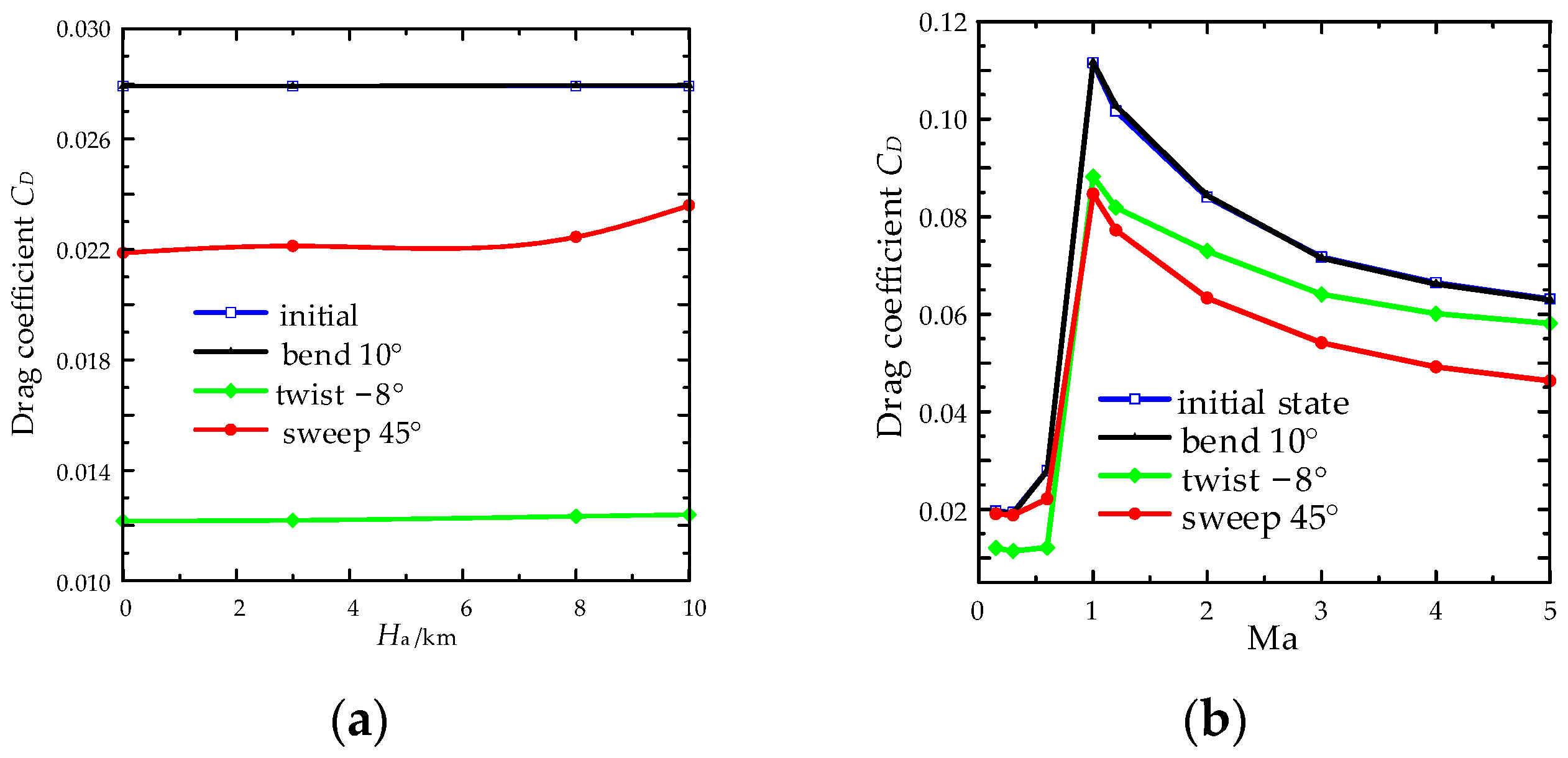
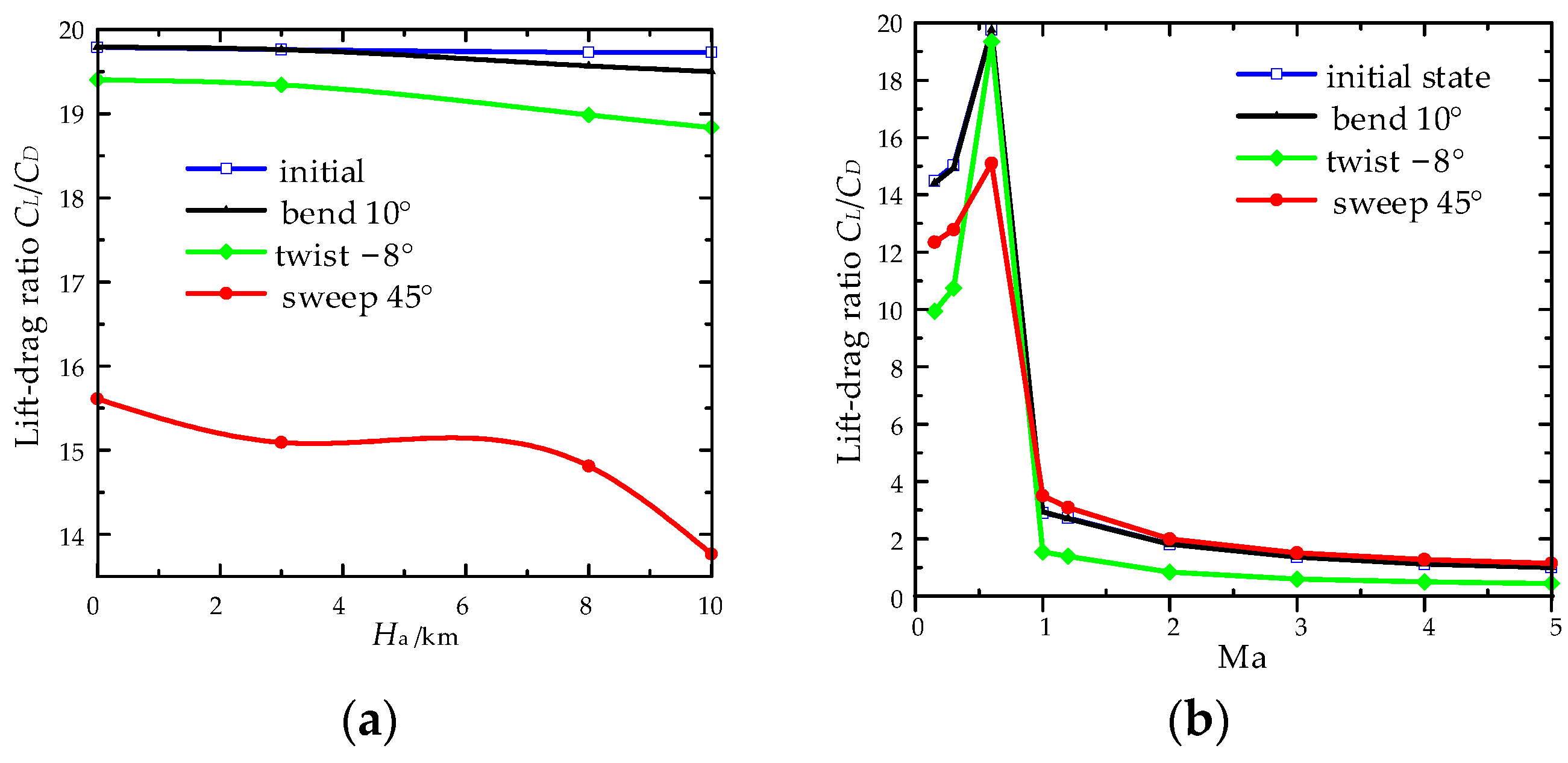
4.2. Effect of Flight Environment on Aerodynamic Characteristics
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kammegne, M.J.T.; Botez, R.M.; Grigorie, L.T.; Mamou, M.; Mébarki, Y. Proportional fuzzy feed-forward architecture control validation by wind tunnel tests of a morphing wing. Chin. J. Aeronaut. 2017, 30, 561–576. [Google Scholar] [CrossRef]
- Fasel, U.; Keidel, D.; Baumann, L.; Cavolina, G.; Eichenhofer, M.; Ermanni, P. Composite additive manufacturing of morphing aerospace structures. Manuf. Lett. 2020, 23, 85–88. [Google Scholar] [CrossRef]
- Wang, J.; Zhao, Y.; Xi, F.; Tian, Y. Design and analysis of a configuration-based lengthwise morphing structure. Mech. Mach. Theory 2020, 147, 103767. [Google Scholar] [CrossRef]
- Xi, F.; Zhao, Y.; Wang, J.; Wang, W.; Tian, Y. Two actuation methods for a complete morphing system composed of a VGTM and a compliant parallel mechanism. J. Mech. Robot. Trans. ASME 2021, 13, 021020. [Google Scholar] [CrossRef]
- Yan, B.; Dai, P.; Liu, R.; Xing, M.; Liu, S. Adaptive super-twisting sliding mode control of variable sweep morphing aircraft. Aerosp. Sci. Technol. 2019, 92, 198–210. [Google Scholar] [CrossRef]
- Bowman, J.; Sanders, B.; Cannon, B.; Kudva, J.; Joshi, S.; Weisshaar, T. Development of next generation morphing aircraft structures. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Honolulu, HI, USA, 23–26 April 2007; p. 1730. [Google Scholar]
- Flanagan, J.; Strutzenberg, R.; Myers, R.; Rodrian, J. Development and flight testing of a morphing aircraft, the NextGen MFX-1. In Proceedings of the 48th AIAA/ASME/ASCE/AHS/ ASC Structures, Structural Dynamics, and Materials Conference; Honolulu, HI, USA, 23–26 April 2007, p. 1707.
- Jenett, B.; Calisch, S.; Cellucci, D.; Cramer, N.; Gershenfeld, N.; Swei, S.; Cheung, K.C. Digital morphing wing: Active wing shaping concept using composite lattice-based cellular structures. Soft Robot 2017, 4, 33–48. [Google Scholar] [CrossRef] [PubMed]
- Love, M.H.; Zink, P.S.; Stroud, R.L.; Bye, D.R.; Chase, C. Impact of actuation concepts on morphing aircraft structures. In Proceedings of the 45th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics & Materials Conference; Palm Springs, CA, USA, 19–22 April 2004, p. 1724.
- Wang, Y.; Xiao, H.; Yang, G.; Jiang, H.; Liu, R.; Ding, J.; Guo, H. Structure design and distributed actuators configuration of a parallel linkage morphing wing. J. Harbin Inst. Technol. 2022, 54, 65–72. [Google Scholar]
- Liu, B.; Liang, H.; Han, Z.H.; Yang, G. Surrogate-based aerodynamic shape optimization of a morphing wing considering a wide Mach-number range. Aerosp. Sci. Technol. 2022, 124, 107557. [Google Scholar] [CrossRef]
- You, H.; Kim, S.; Joe, W.Y.; Yun, G.J. New concept for aircraft morphing wing skin: Design, modeling, and analysis. AIAA J. 2019, 57, 1786–1792. [Google Scholar] [CrossRef]
- Jones, M.P.; Murali, G.G.; Laurin, F.; Robinson, P.; Bismarck, A. Functional flexibility: The potential of morphing composites. Compos. Sci. Technol. 2022, 230, 109792. [Google Scholar] [CrossRef]
- Yu, J.R.; Ma, J.Y. Design and shear analysis of an angled morphing wing skin module. Appl. Sci. 2022, 12, 3092. [Google Scholar] [CrossRef]
- Yu, A.; Xi, F.F.; Moosavian, A.; Li, B. Design of a Sliding Morphing Skin with Segmented Rigid Panels. J. Aircr. 2018, 55, 1985–1994. [Google Scholar] [CrossRef]
- Moosavian, A.; Xi, F.F.; Hashemi, S.M. Design and motion control of fully variable morphing wings. J. Aircr. 2013, 50, 1189–1201. [Google Scholar] [CrossRef]
- Yokozeki, T.; Takeda, S.-I.; Ogasawara, T.; Ishikawa, T. Mechanical properties of corrugated composites for candidate materials of flexible wing structures. Compos. Part A Appl. Sci. Manuf. 2006, 37, 1578–1586. [Google Scholar] [CrossRef]
- Wang, Z. Recent advances in novel metallic honeycomb structure. Compos. Part B Eng. 2019, 166, 731–741. [Google Scholar] [CrossRef]
- Majid, T.; Jo, B.W.; Cestino, E. Status and challenges on design and implementation of camber morphing mechanisms. Int. J. Aerospace Eng. 2021, 2021, 6399937. [Google Scholar] [CrossRef]
- Wang, J.; Li, Z.; Liang, F.; Liu, W.; Liao, J.; Chen, F.; Li, M.; Shao, T. Design, simulation and theoretical study on novel cored octagon honeycomb for helicopter crashworthiness. Acta Aeronaut. Astronaut. Sin. 2022, 43, 225244. [Google Scholar]
- Olympio, K.R.; Gandhi, F. Zero Poisson’s ratio cellular honeycombs for flex skins undergoing one-dimensional morphing. J. Intell. Mater. Syst. Struct. 2010, 21, 1737–1753. [Google Scholar] [CrossRef]
- Bubert, E.A.; Woods, B.K.S.; Lee, K.; Kothera, C.S.; Wereley, N.M. Design and fabrication of a passive 1d morphing aircraft skin. J. Intell. Mater. Syst. Struct. 2010, 21, 1699–1717. [Google Scholar] [CrossRef]




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulated Results wmax/mm | Theoretical Result wmax/mm | Relative Error RE/% | |
|---|---|---|---|
| The hybrid metastructure skin | 0.84395 | 0.7946 | −5.8575 |
| The equivalent orthogonal anisotropic sheet | 0.82234 | −3.3732 |
| Density (g/cm3) | Young’s Modulus (MPa) | Poisson’s Ratio | |||||
|---|---|---|---|---|---|---|---|
| Ex | Ey | Ez | vxy | vyz | vxz | ||
| Carbon fiber | 1.8 | 395,000 | 6000 | 6000 | 0.2 | 0.4 | 0.2 |
| State | CL | ΔCL/% | CD | ΔCD/% | ||
|---|---|---|---|---|---|---|
| Rigid Skin | Flexible Skin | Rigid Skin | Flexible Skin | |||
| Initial | 0.5585 | 0.59236 | 6.06 | 0.030210 | 0.026716 | −11.57 |
| Bend | 0.1732 | 0.17835 | 2.97 | 0.028648 | 0.026825 | −6.36 |
| Twist | 0.0555 | 0.05407 | −2.58 | 0.019276 | 0.014484 | −24.86 |
| Sweep | 0.11767 | 0.11776 | 0.076 | 0.018881 | 0.021818 | 15.6 |
| Grid Size | CL | ΔCL/% | CD | ΔCD/% | L/D |
|---|---|---|---|---|---|
| Coarse (1.47 million) | 0.39768 | 0.18 | 0.021003 | 1.89 | 18.93448 |
| Medium (3.43 million) | 0.39307 | −0.99 | 0.020292 | −1.56 | 19.37043 |
| Fine (6.42 million) | 0.39698 | — | 0.020614 | — | 19.25771 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Jiang, S.; Wang, Y.; Xiao, H. Fluid–Structure Coupling and Aerodynamic Performance of a Multi-Dimensional Morphing Wing with Flexible Metastructure Skin. Aerospace 2023, 10, 678. https://doi.org/10.3390/aerospace10080678
Yang H, Jiang S, Wang Y, Xiao H. Fluid–Structure Coupling and Aerodynamic Performance of a Multi-Dimensional Morphing Wing with Flexible Metastructure Skin. Aerospace. 2023; 10(8):678. https://doi.org/10.3390/aerospace10080678
Chicago/Turabian StyleYang, Hui, Songcheng Jiang, Yan Wang, and Hong Xiao. 2023. "Fluid–Structure Coupling and Aerodynamic Performance of a Multi-Dimensional Morphing Wing with Flexible Metastructure Skin" Aerospace 10, no. 8: 678. https://doi.org/10.3390/aerospace10080678
APA StyleYang, H., Jiang, S., Wang, Y., & Xiao, H. (2023). Fluid–Structure Coupling and Aerodynamic Performance of a Multi-Dimensional Morphing Wing with Flexible Metastructure Skin. Aerospace, 10(8), 678. https://doi.org/10.3390/aerospace10080678