
The Study of Selected Aspects of the Suborbital Vehicle Return Flight Trajectory


Abstract
1. Introduction
2. Concept of Vehicle for Suborbital Flights
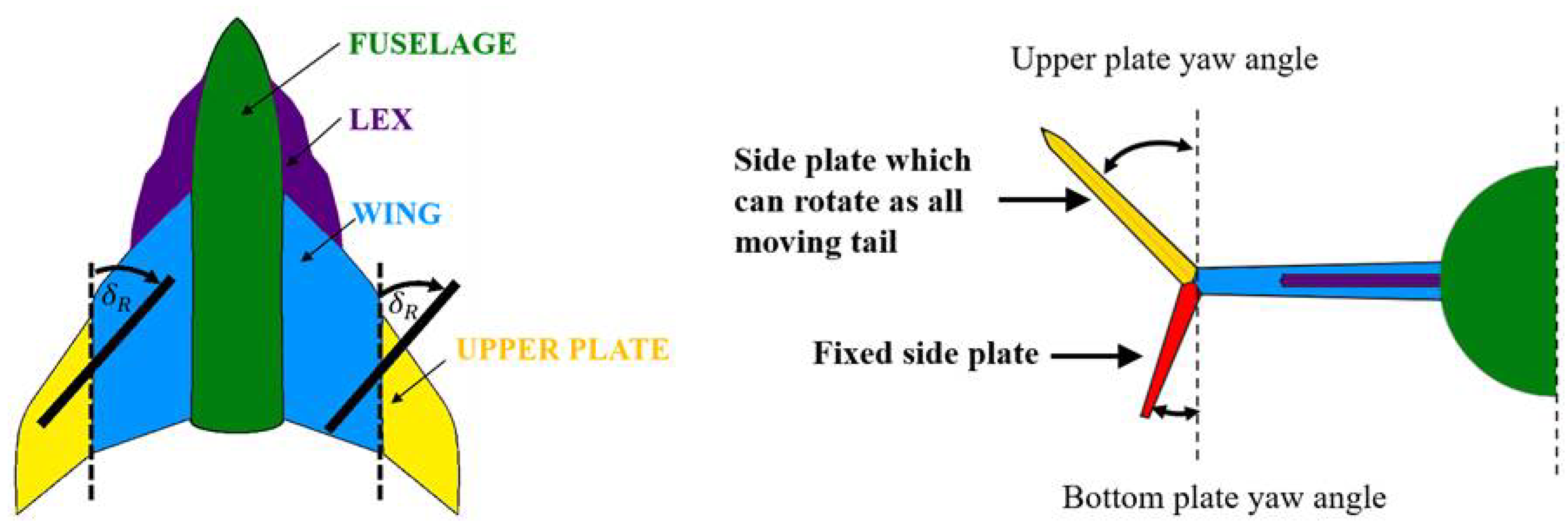
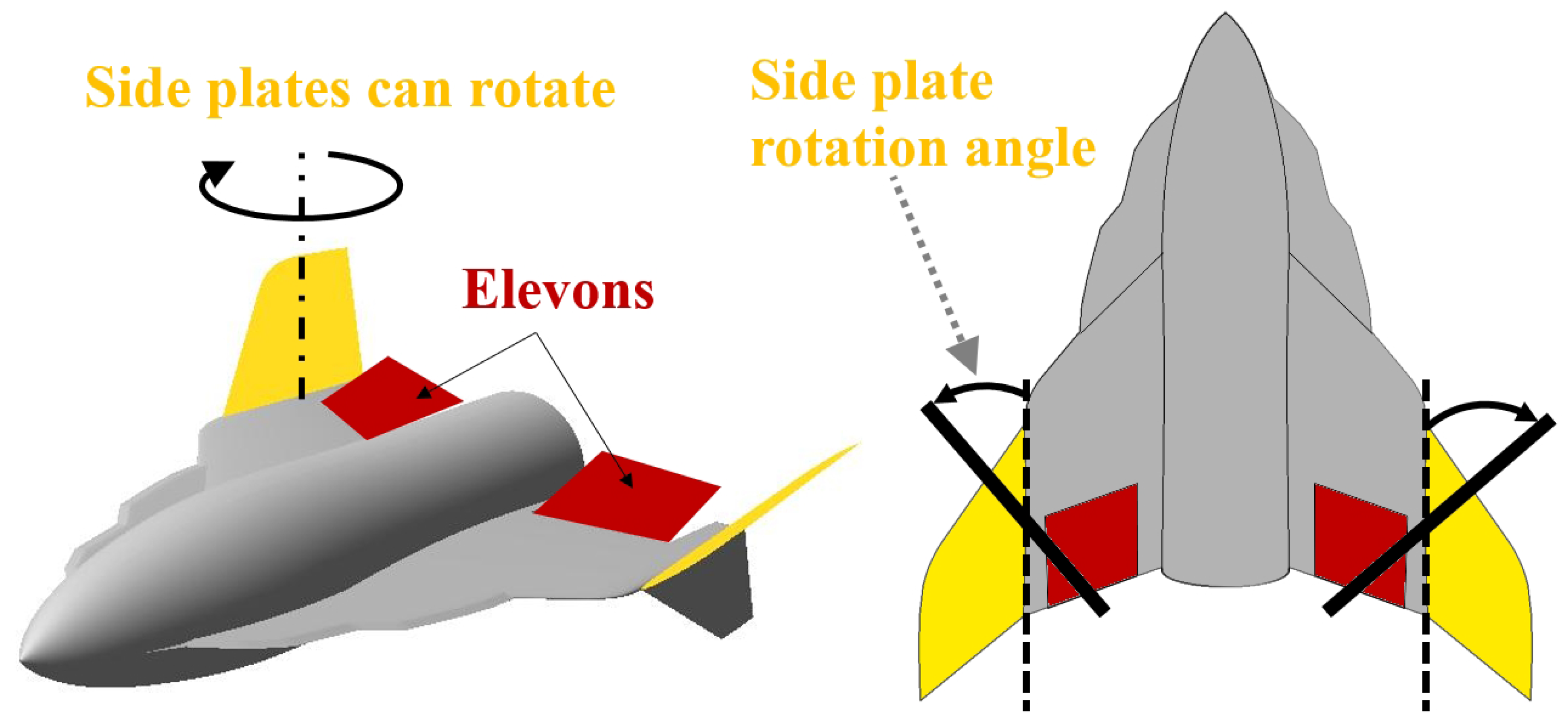
2.1. Rocket Plane Longitudinal Control
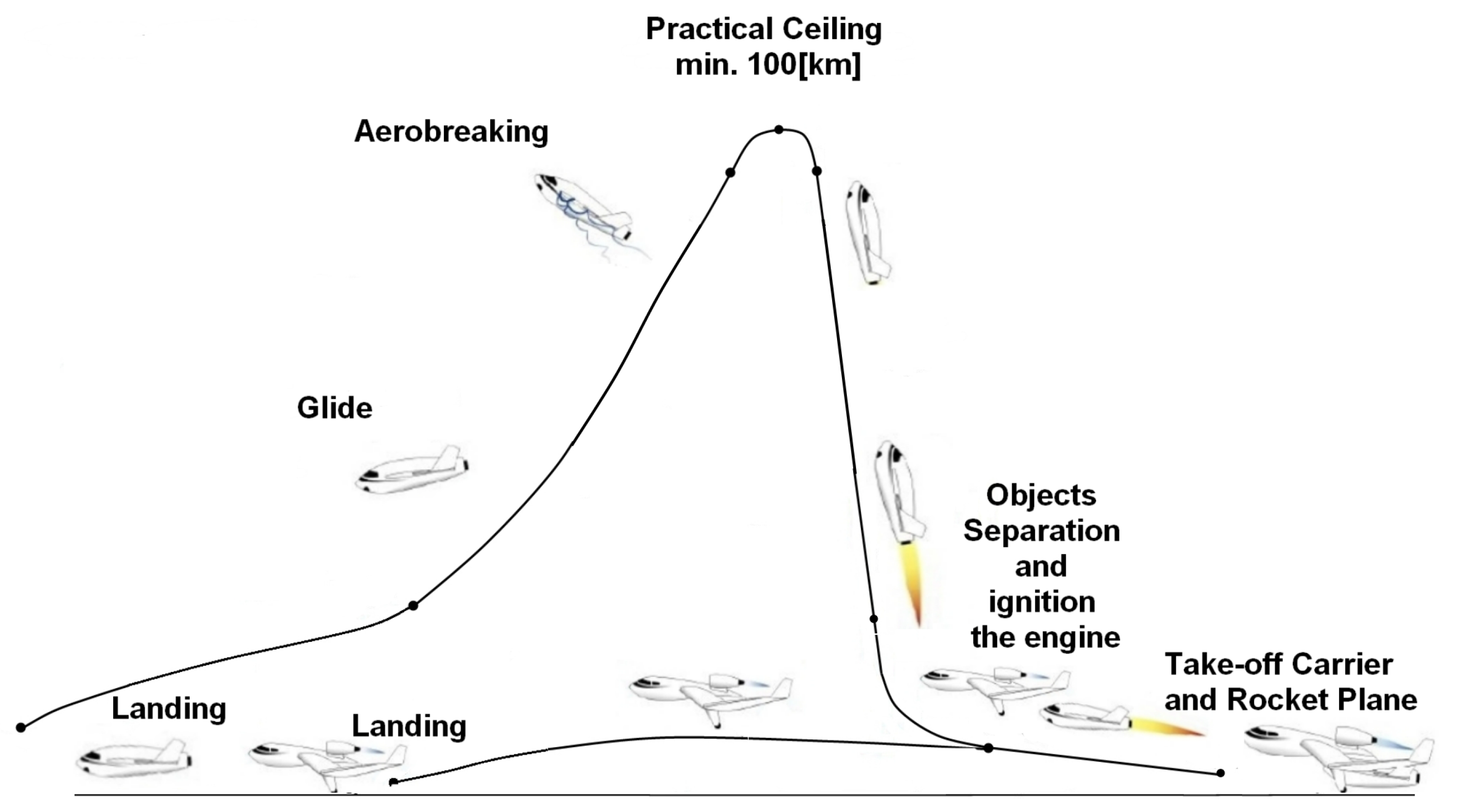
2.2. Mission Profile
2.3. Rocket Plane Geometrical Parameters
3. Problem Definition
4. Numerical Model
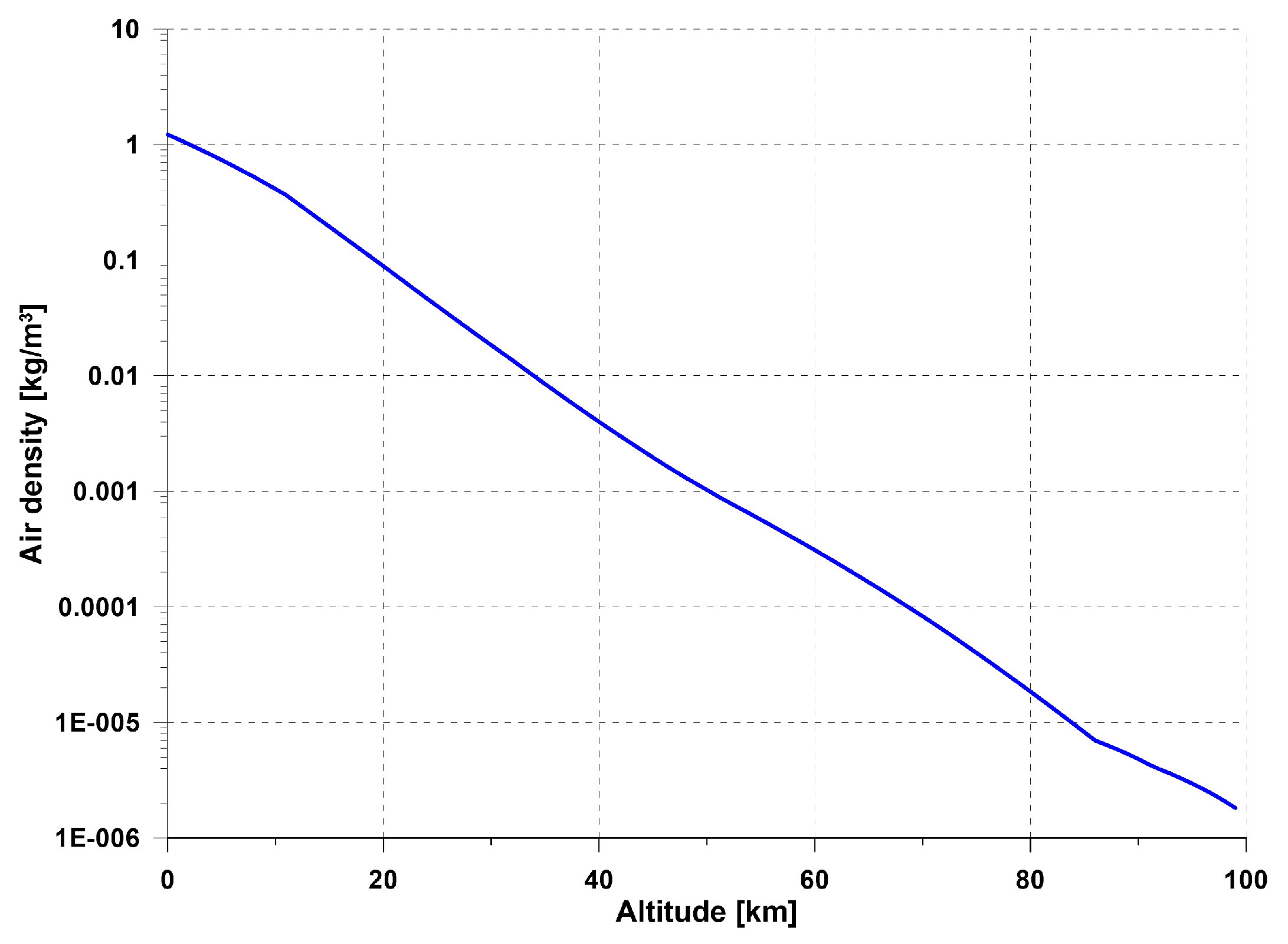
4.1. Model of Atmosphere
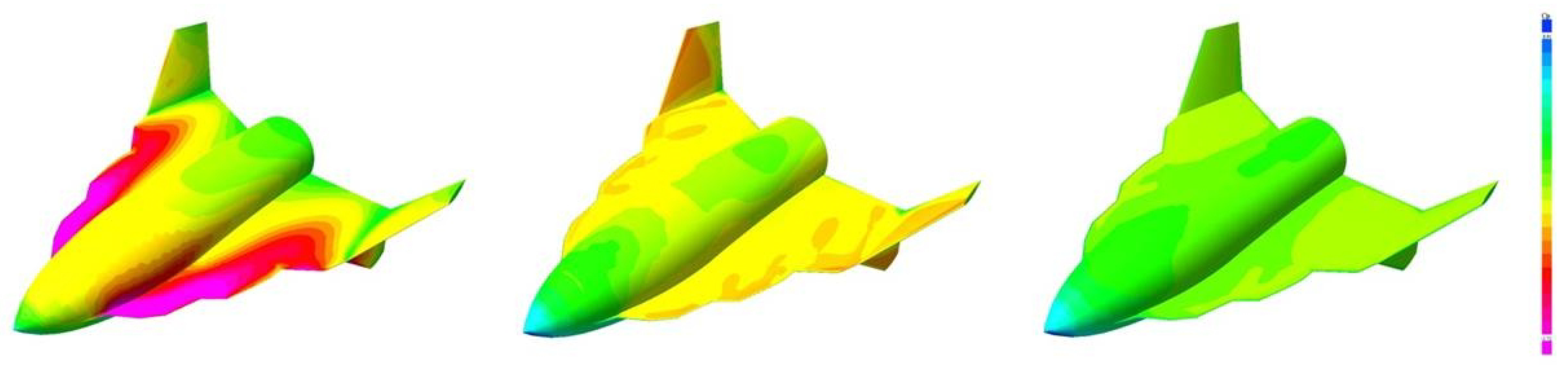
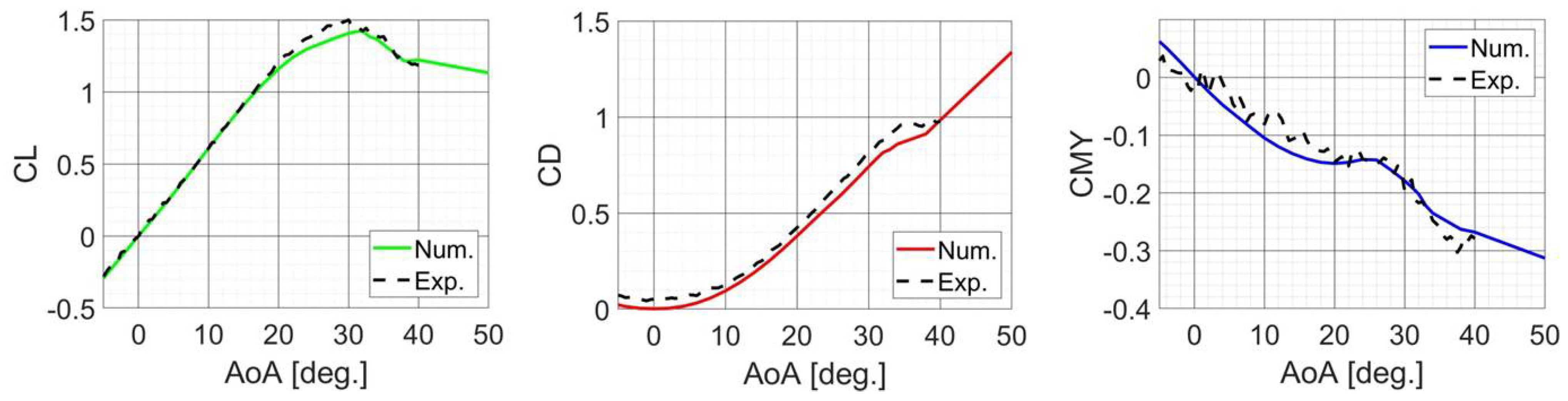
4.2. Aerodynamics
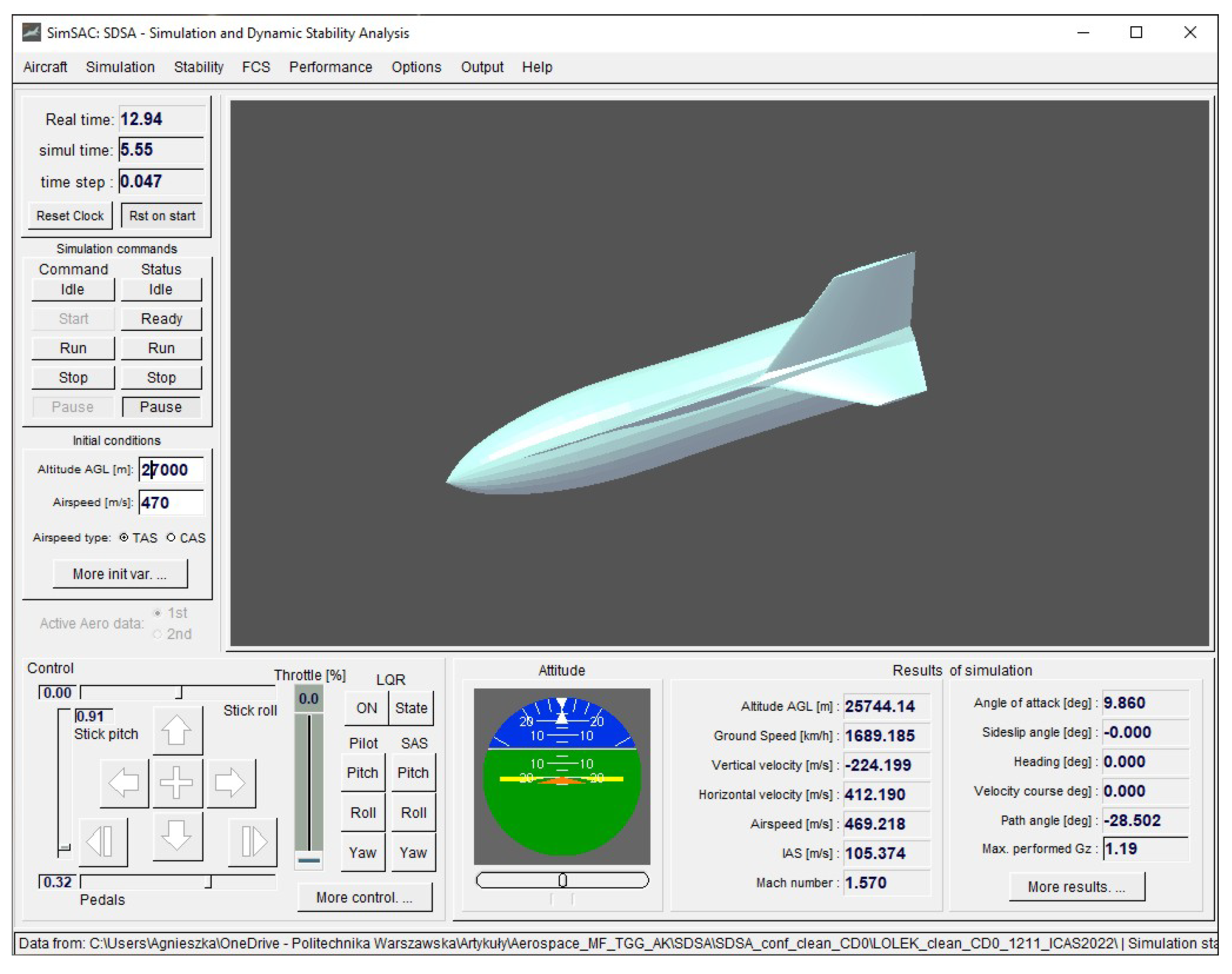
4.3. Flight Simulations
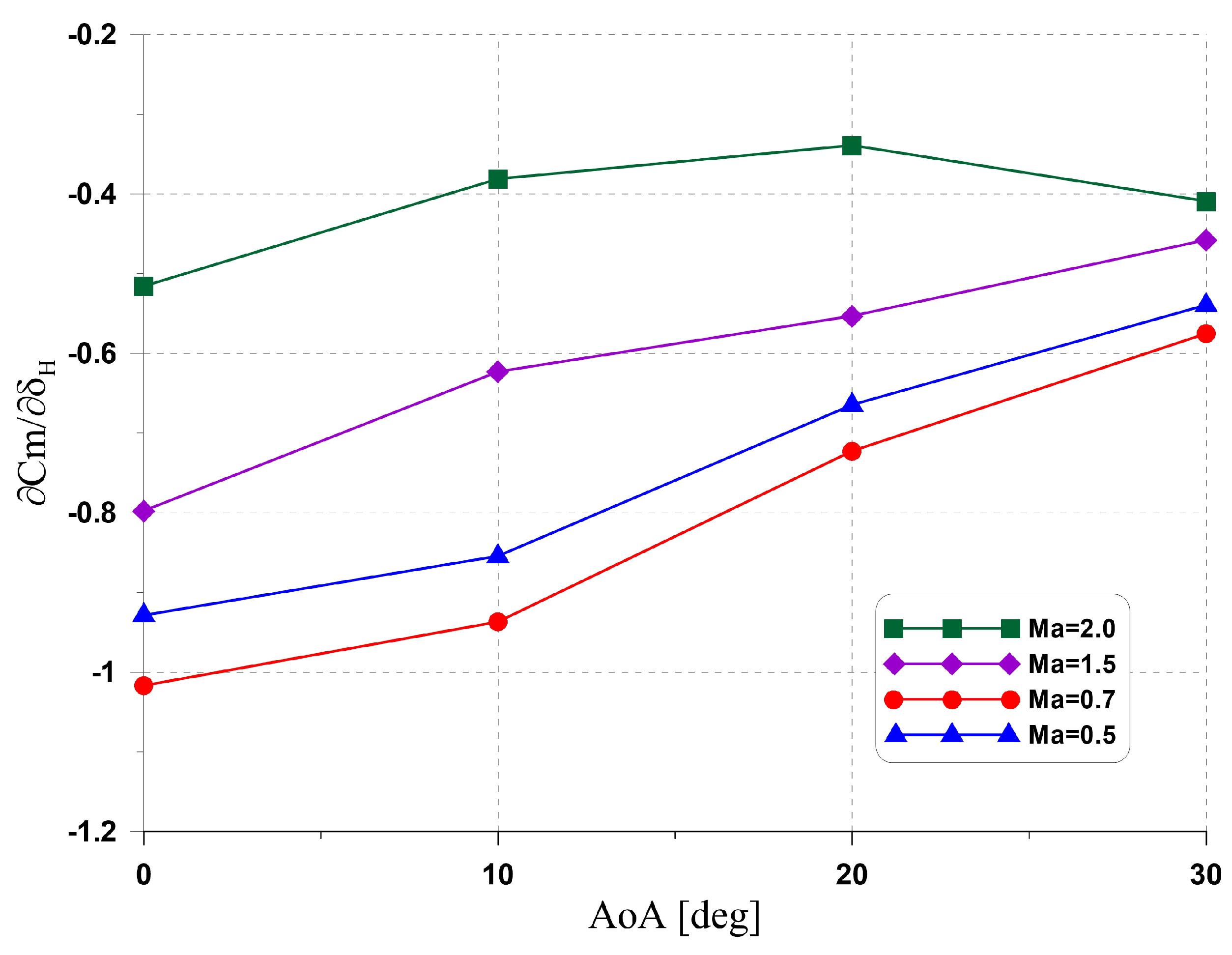
4.4. Control Derivatives
5. Results
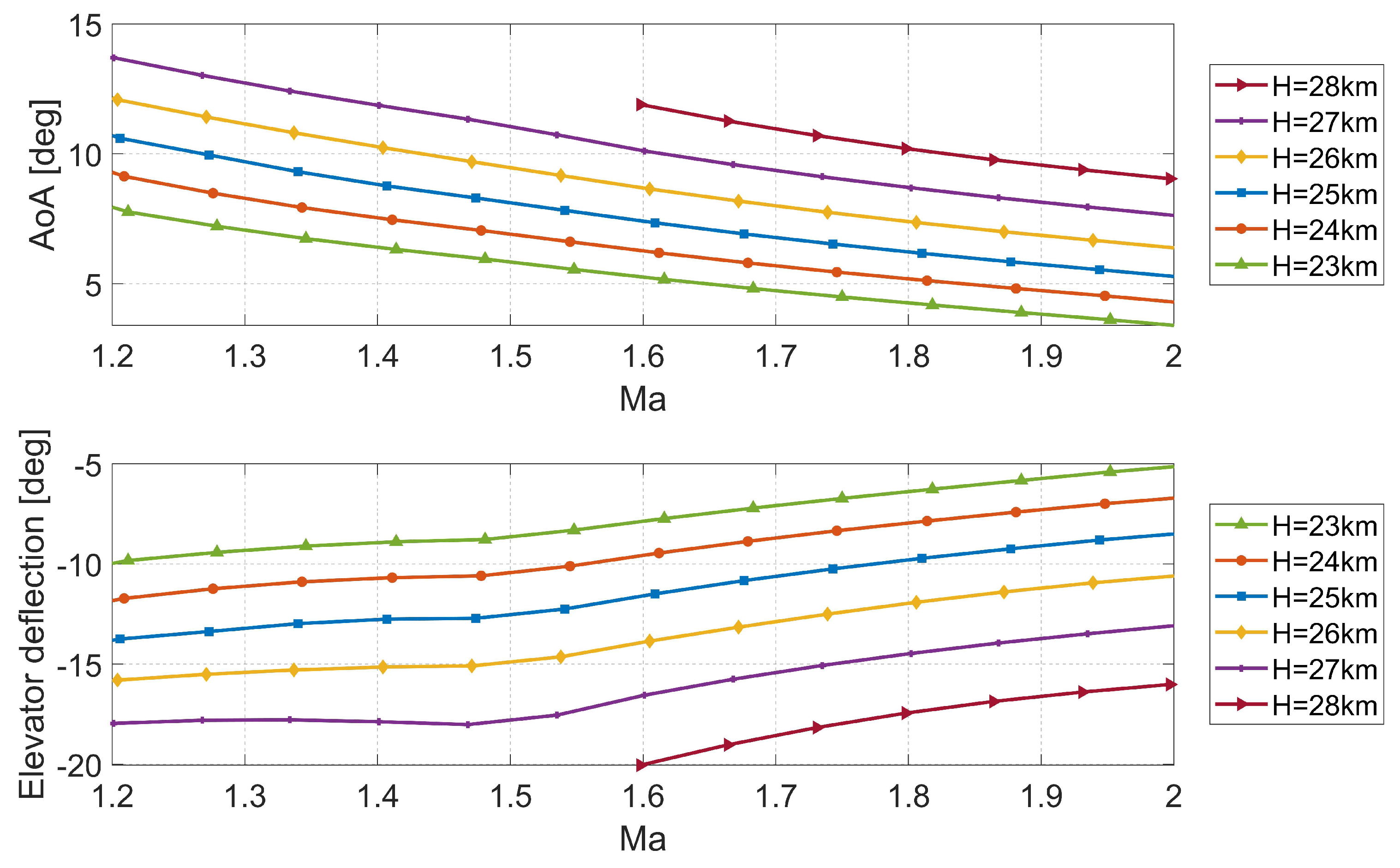
5.1. Results for Trimmed Flight
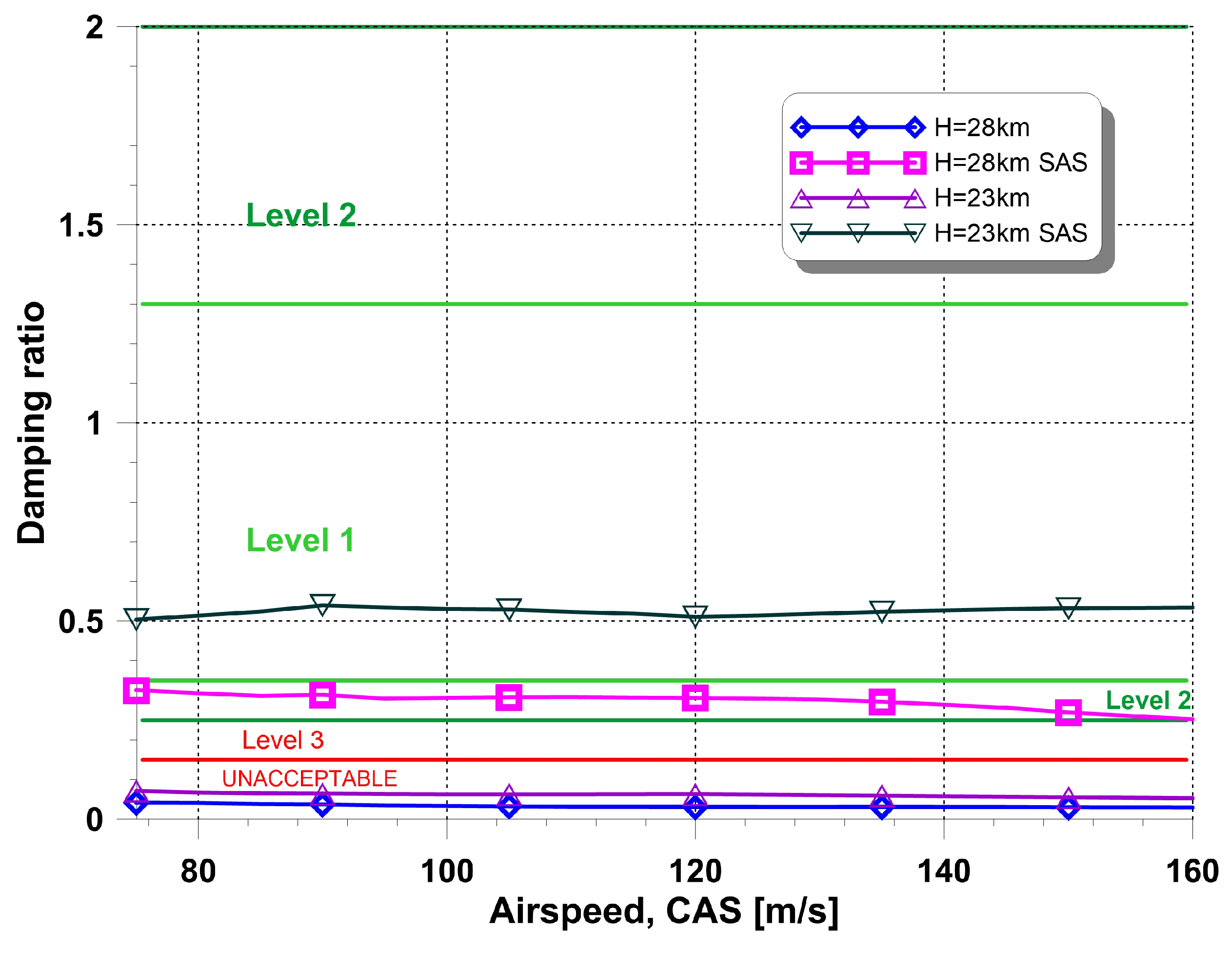
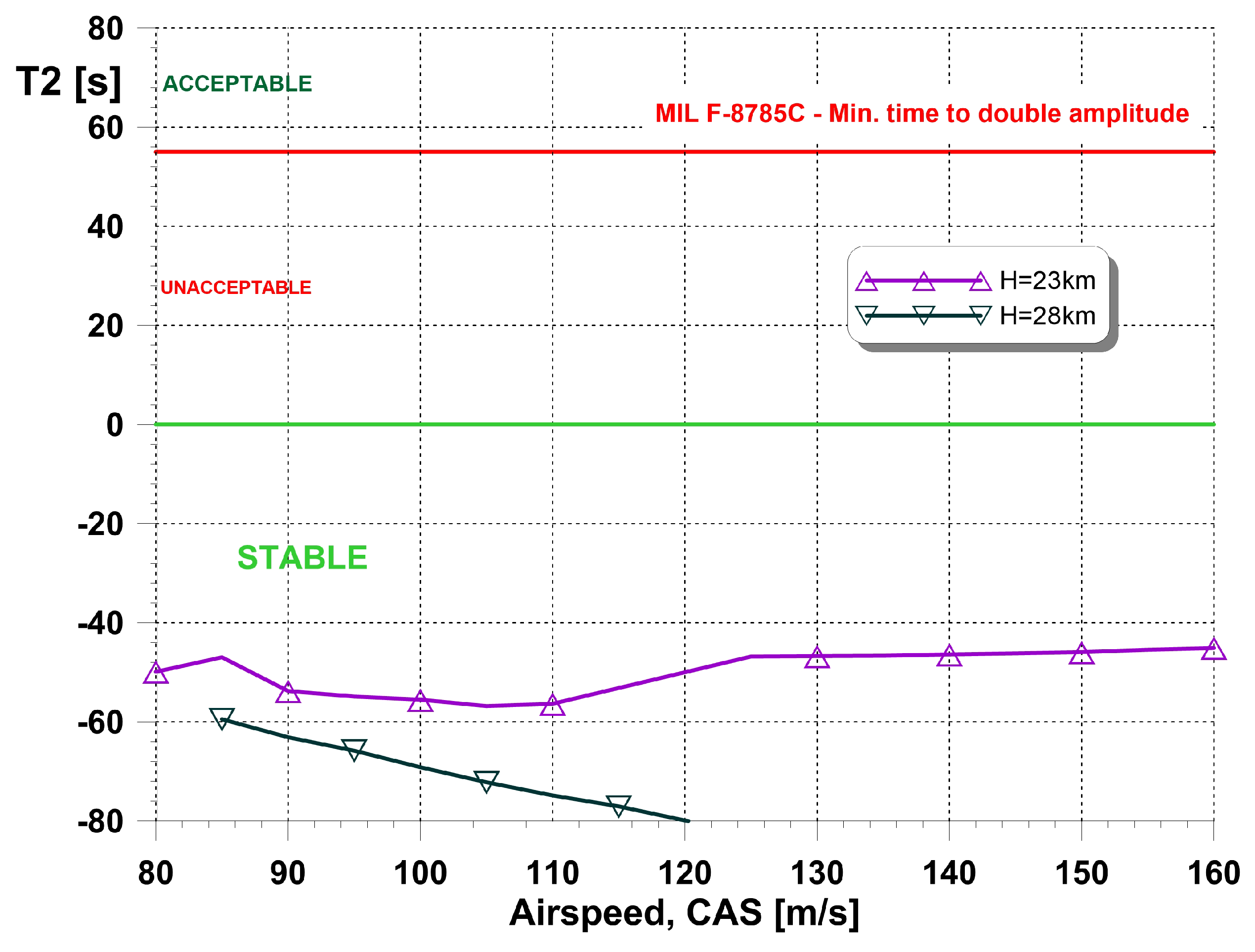
5.2. Dynamic Stability
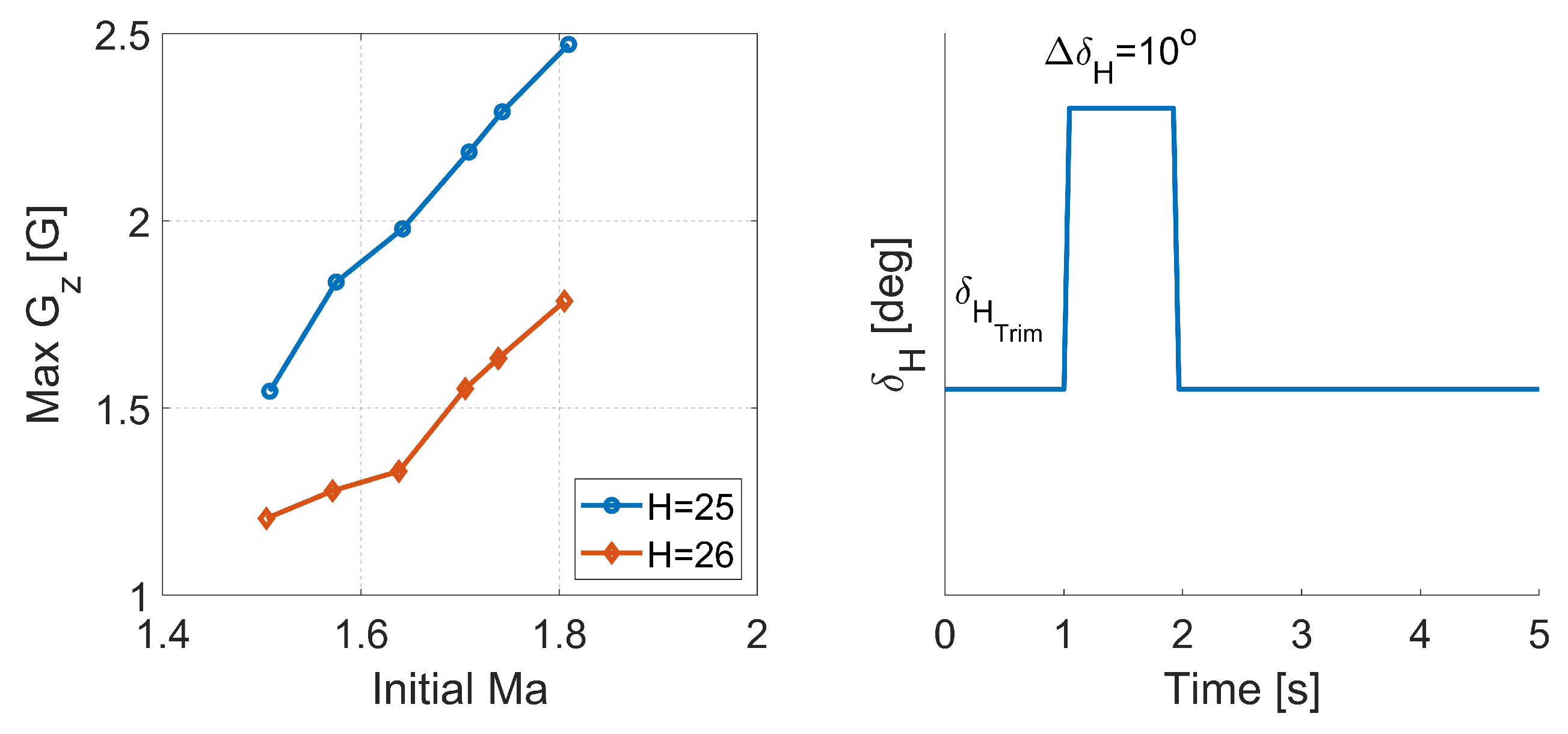
5.3. Results of Flights Simulations
6. Conclusions
- For altitudes between 23 to 28 km and a supersonic speed regime, the short period damping is insufficient and application of the Stability Augmentation System (SAS) is recommended. A proper selection of gain resulted in shifting the damping to the Level 1 (according to MIL specification).
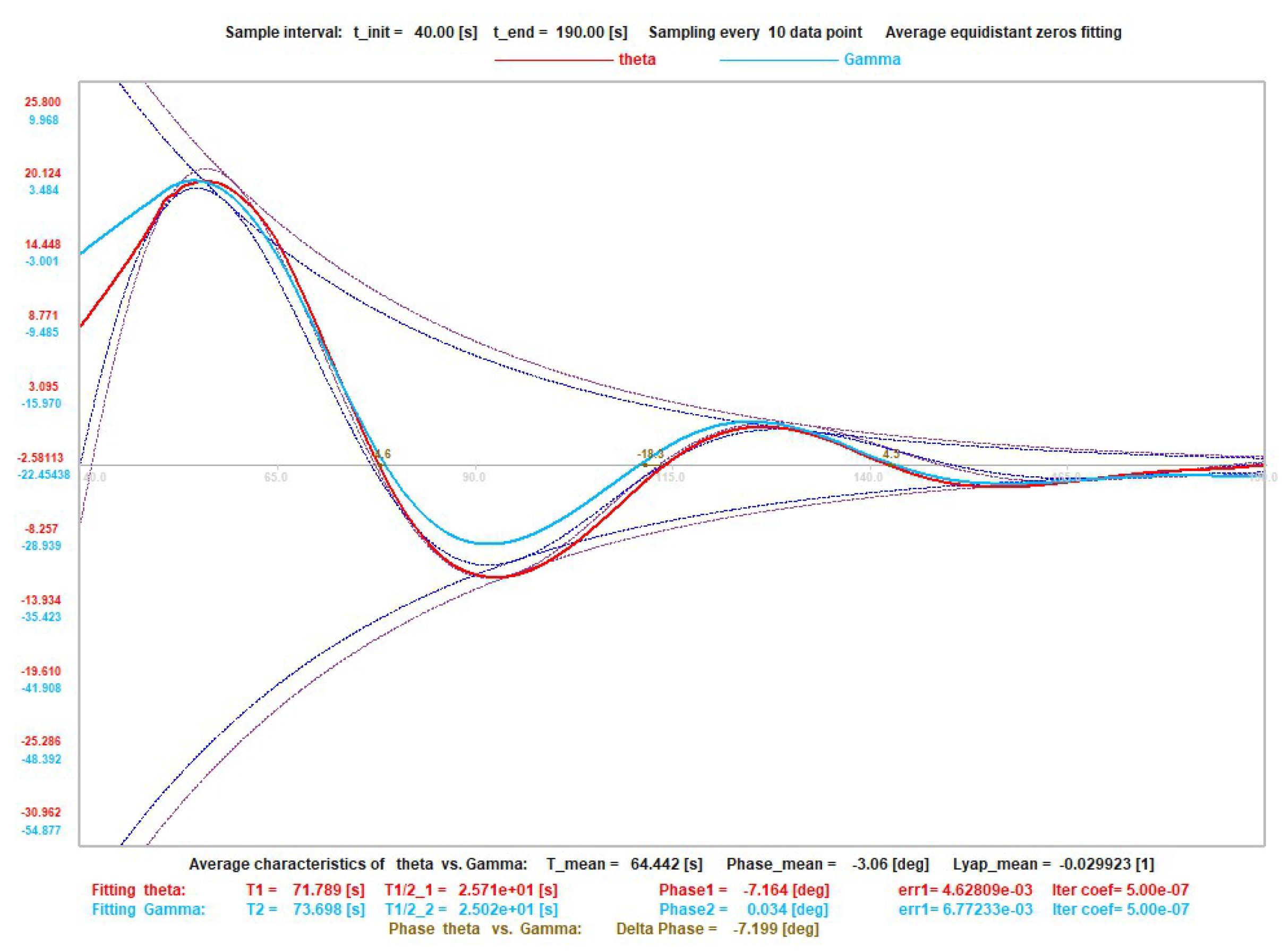
- In the case of a vehicle which glides at supersonic speed, the phugoid motion parameters should be investigated with the use of flight simulation, rather than solving the eigenvalue problem. This is associated with the change in atmosphere parameters vs. altitude, which significantly affect the oscillation characteristics. In the presented case, the difference in the period value is almost five times.
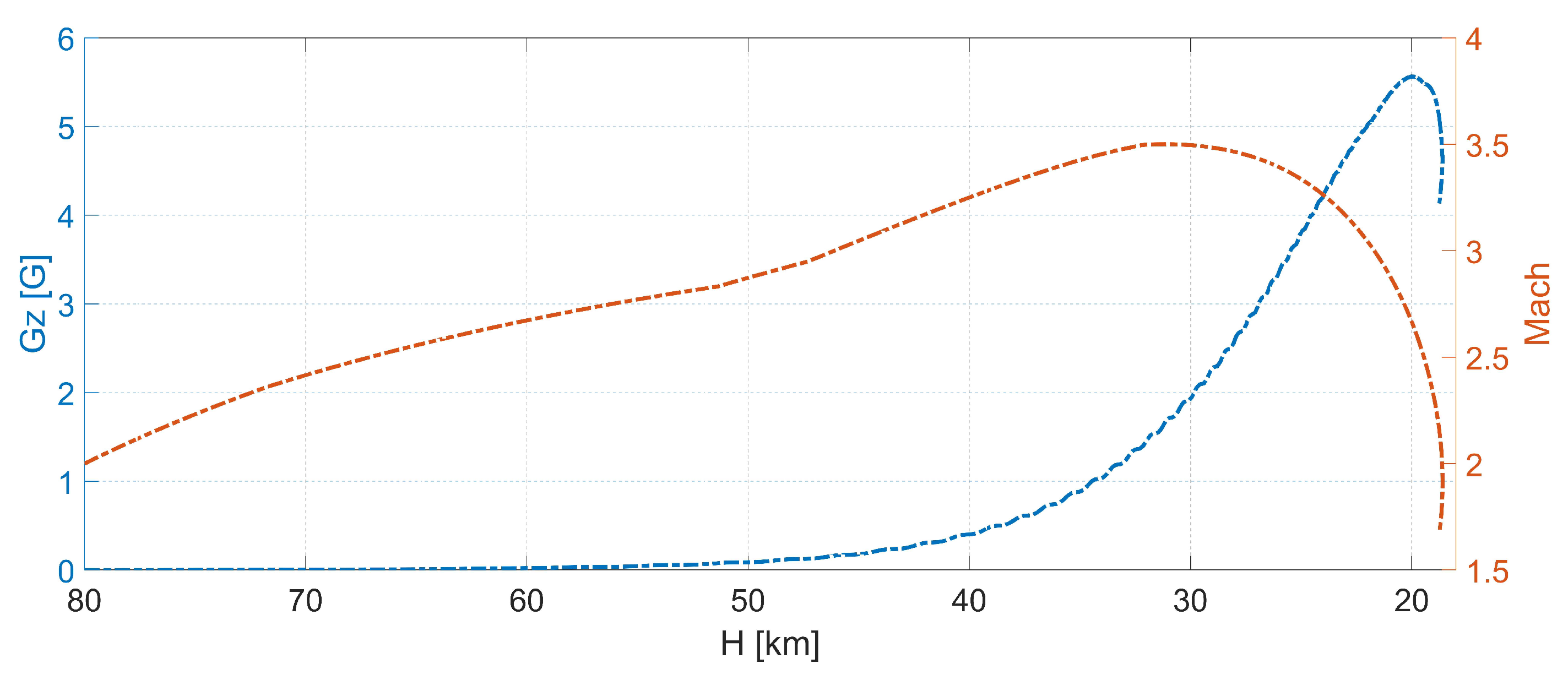
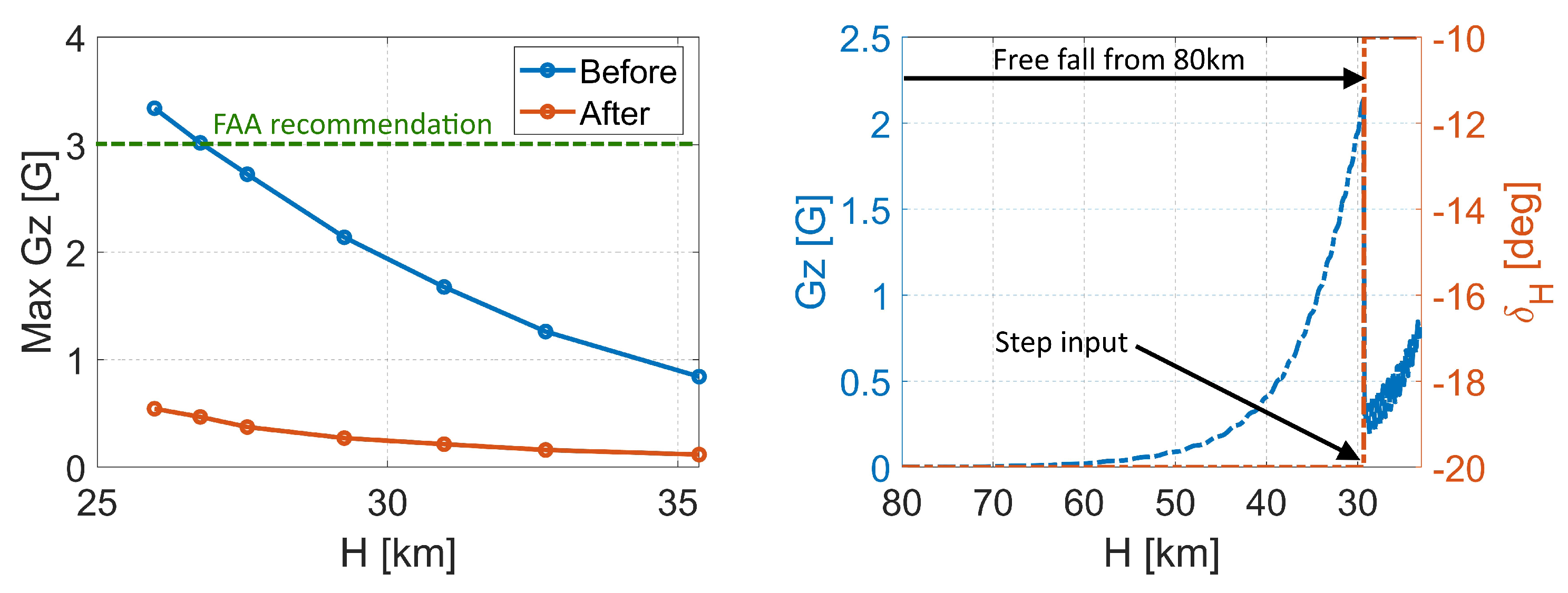
- The maximum Mach number and maximum G-load occur at different altitudes. The highest values of the Ma were noticed at between 30–35 km, while the highest values of G-load were recorded around 20 km.
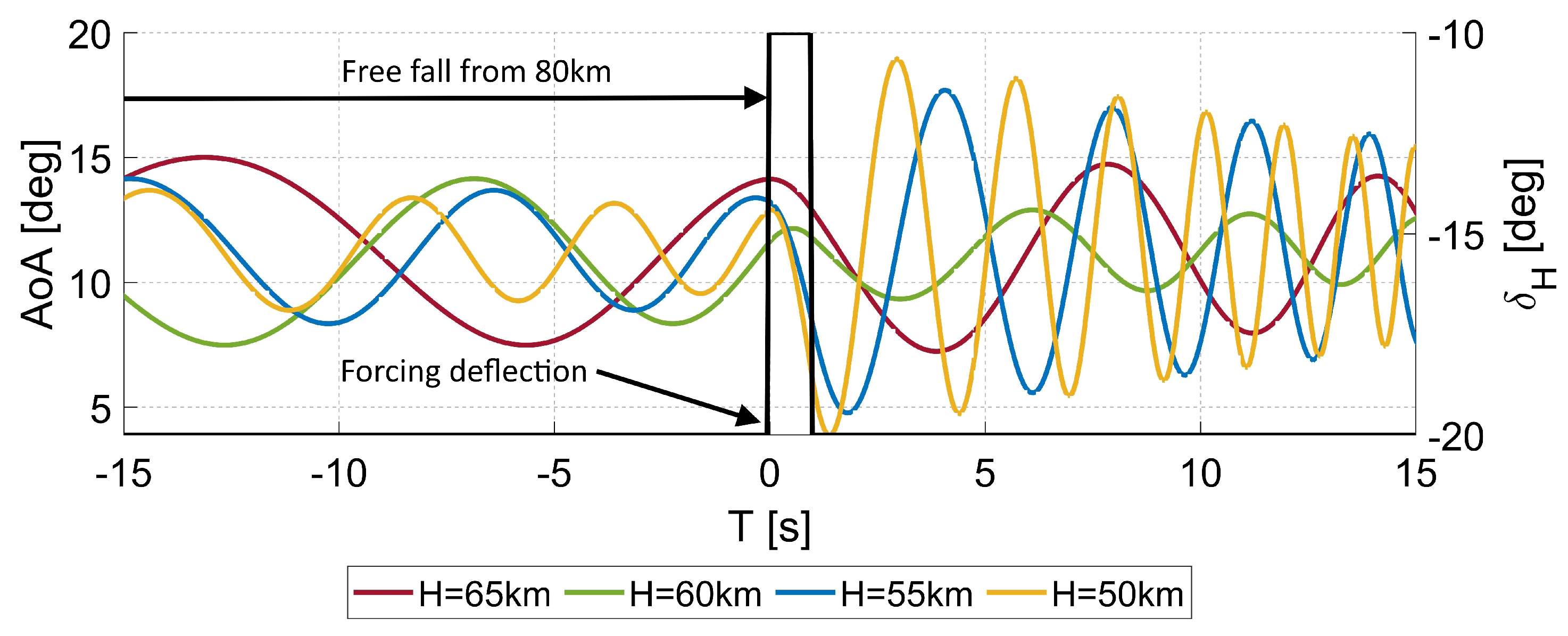
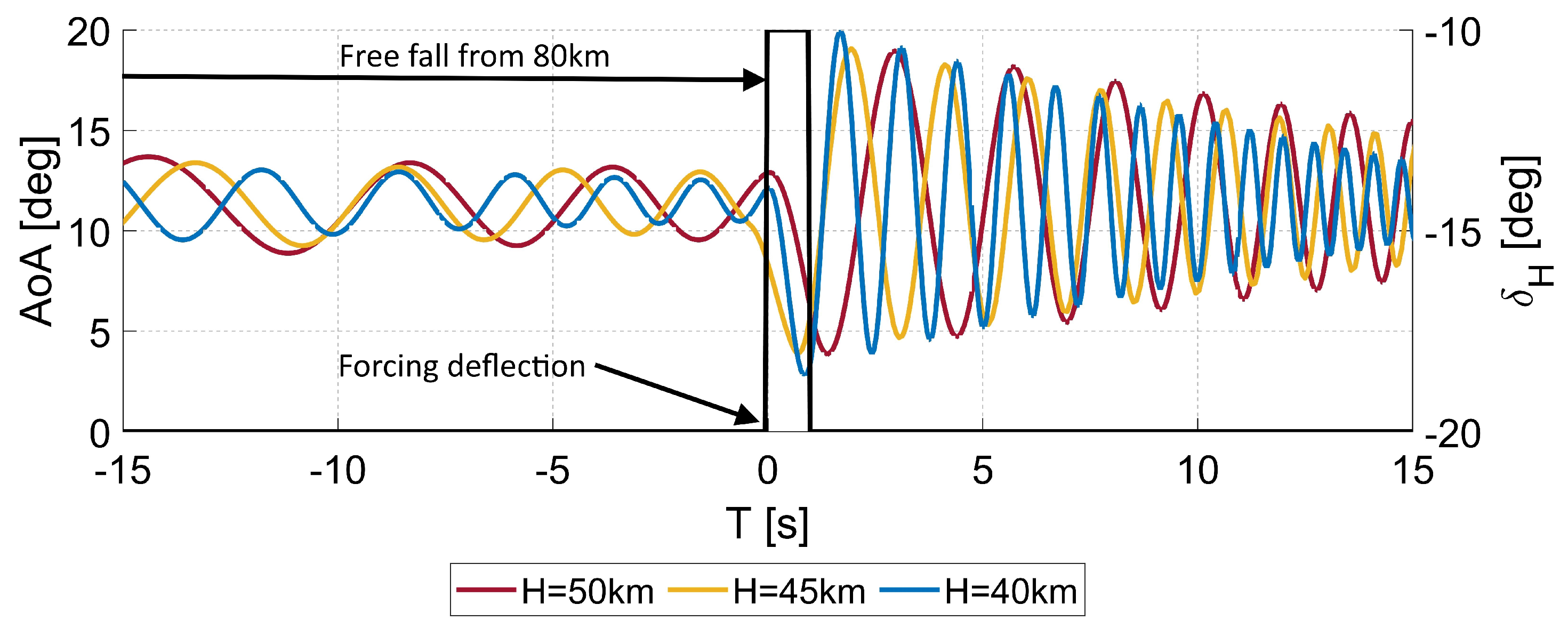
- In the case of the rocket plane response to control for very high altitudes and supersonic speed, the impact of the impulse deflection of the elevator on angle of attack starts to be visible around 55 km. The deflection increases the oscillations amplitude, but the oscillations are damped for all considered altitudes.
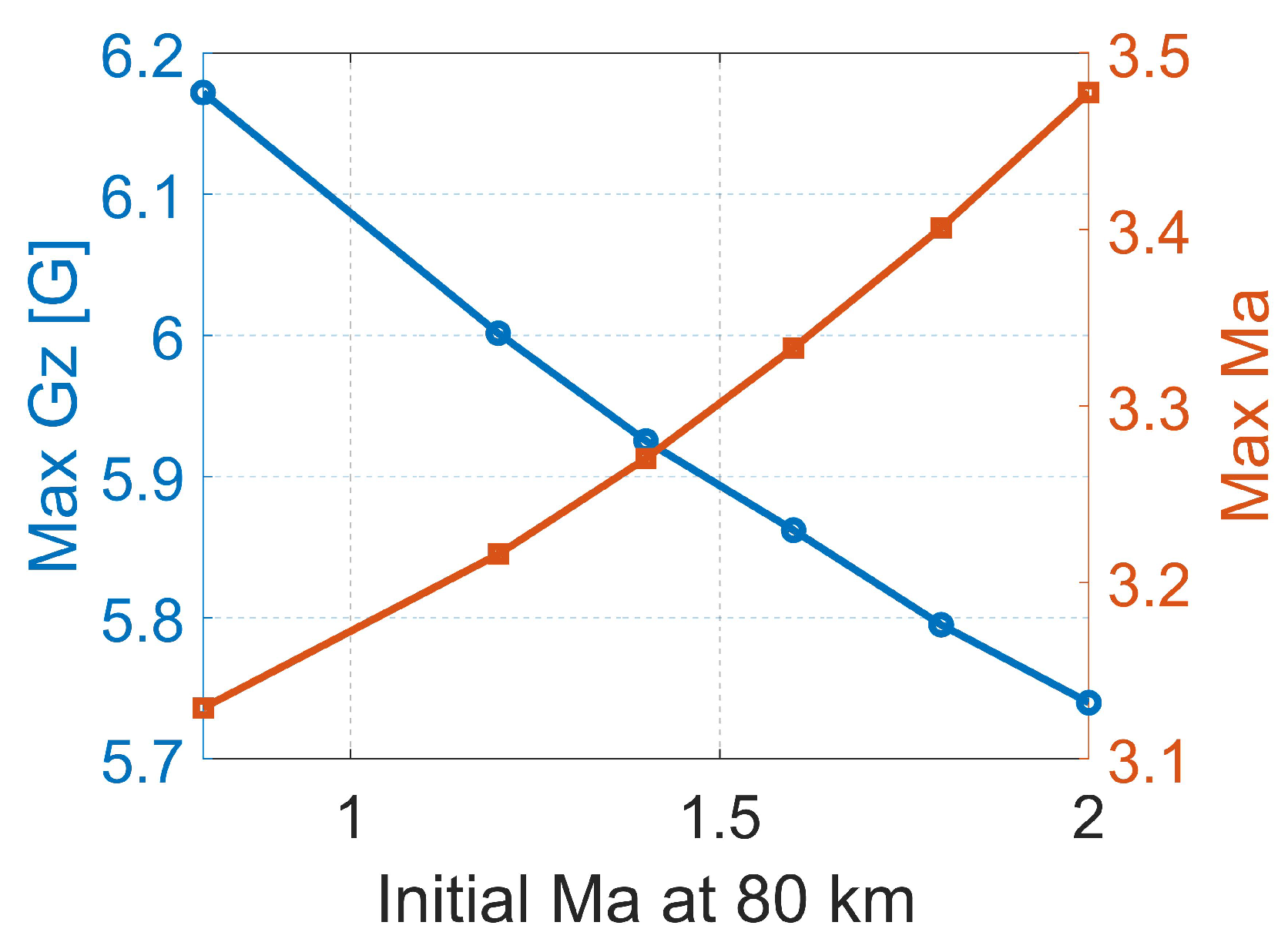
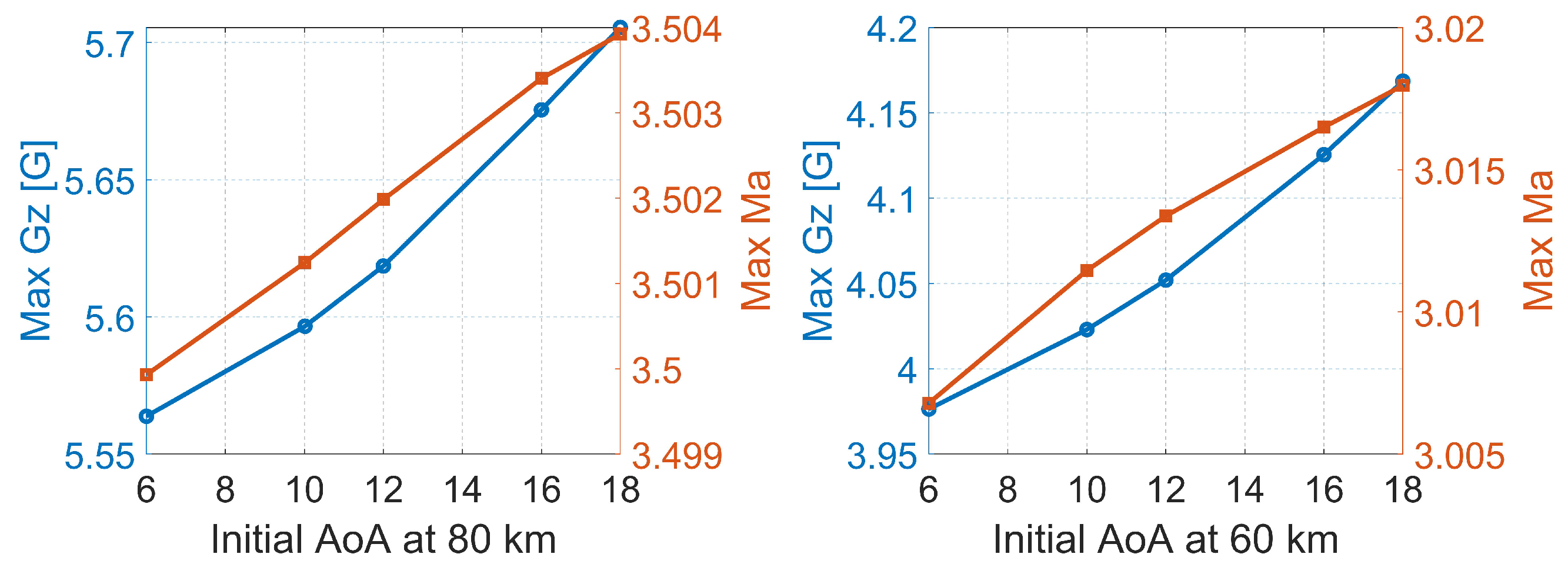
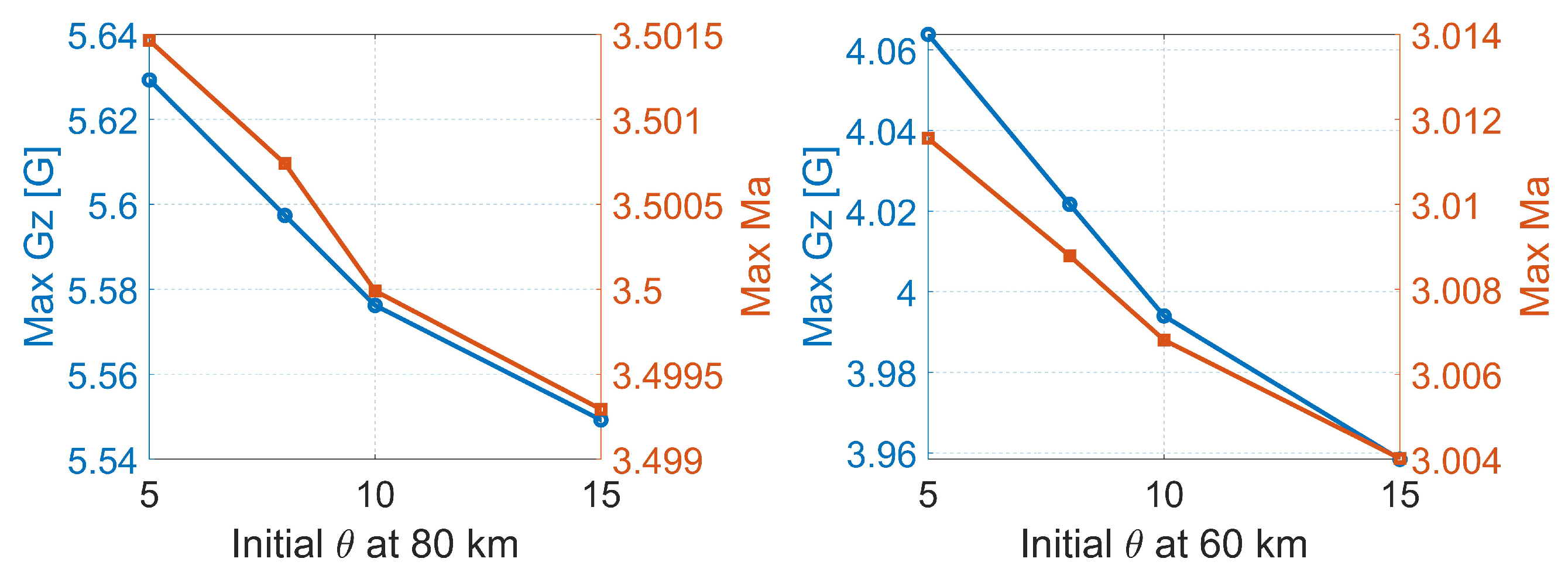
- The initial speed and orientation of the rocket plane have negligible effect on the maximum Mach number and minor impact on G-loads. To reduce the G-load, the angle of attack must be reduced at low altitudes below approximately 27 km.
7. Further Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Inspiration4. 2023. Available online: https://inspiration4.com/mission (accessed on 2 April 2023).
- Axiom Space. 2023. Available online: https://www.axiomspace.com/ax1 (accessed on 2 April 2023).
- Polaris. 2023. Available online: https://polarisprogram.com/dawn/ (accessed on 2 April 2023).
- Ansari Prize. 2023. Available online: https://www.xprize.org/prizes/ansari (accessed on 24 March 2023).
- Sarigul-Klijn, M.; Sarigul-Klijn, N. Flight Mechanics of Manned Sub-Orbital Reusable Launch Vehicles with Recommendations for Launch and Recovery. In Proceedings of the 41st Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 2003; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2003. [Google Scholar] [CrossRef]
- Blue Origin. 2023. Available online: https://www.blueorigin.com/new-shepard/fly/ (accessed on 24 March 2023).
- Virgin Galactic Spaceflight. 2023. Available online: https://www.virgingalactic.com/#horizontal-scroll. (accessed on 24 March 2023).
- Scaled Composites. 2023. Available online: https://www.scaled.com/portfolio/spaceshipone/ (accessed on 24 March 2023).
- Antuñano, M.J.; Baisden, D.L.; Davis, J.; Hastings, J.D.; Jennings, R.; Jones, D.; Jordan, J.L.; Mohler, S.R.; Ruehle, C.; Salazar, G.J.; et al. Guidance for MedicalScreening of CommercialAerospace Passengers; Techreport DOT/FAA/AM-06/1; FAA, Office of Aerospace Medicine: Washington, DC, USA, 2006.
- Davis, J.R.; Johnson, R.; Stepanek, J.; Fogarty, J.A. Fundamentals of Aerospace Medicine, 4th ed.; Wolters Kluwer Health Adis (ESP): Philadelphia, PA, USA, 2011. [Google Scholar]
- Clément, G. Fundamentals of Space Medicine; Springer: New York, NY, USA, 2011. [Google Scholar] [CrossRef]
- Wang, K.; Zhang, B. Multiobjective trajectory optimization for a suborbital spaceplane using Directed Search Domain approach. Aerosp. Sci. Technol. 2018, 77, 713–724. [Google Scholar] [CrossRef]
- Charbonnier, D.; Vos, J.; Marwege, A.; Hantz, C. Computational fluid dynamics investigations of aerodynamic control surfaces of a vertical landing configuration. CEAS Space J. 2022, 14, 517–532. [Google Scholar] [CrossRef]
- Jenie, Y.I.; Suarjaya, W.W.H.; Poetro, R.E. Falcon 9 Rocket Launch Modeling and Simulation with Thrust Vectoring Control and Scheduling. In Proceedings of the 2019 IEEE 6th Asian Conference on Defence Technology (ACDT), Bali, Indonesia, 13–15 November 2019. [Google Scholar] [CrossRef]
- Pruzan, D.; Mendenhall, M.; Rose, W.; Schuster, D. Grid Fin Stabilization of the Orion Launch Abort Vehicle. In Proceedings of the 29th AIAA Applied Aerodynamics Conference, Honolulu, Hawaii, USA, 27–30 June 2011; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2011. [Google Scholar] [CrossRef]
- Tripathi, M.; Sucheendran, M.M.; Misra, A. Experimental analysis of cell pattern on grid fin aerodynamics in subsonic flow. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 234, 537–562. [Google Scholar] [CrossRef]
- Schülein, E.; Guyot, D. Novel High-Performance Grid Fins for Missile Control at High Speeds:Preliminary Numerical and Experimental Investigations. In Proceedings of the Meeting Proceedings RTO-MP-AVT-135, Neuilly-sur-Seine, France, 15–18 May 2006. [Google Scholar]
- Olejnik, A.; Kiszkowiak, Ł.; Zalewski, P.; Dziubiński, A. Low-Cost Satellite Launch System—Aerodynamic Feasibility Study. Aerospace 2022, 9, 284. [Google Scholar] [CrossRef]
- Sahbon, N.; Jacewicz, M.; Lichota, P.; Strzelecka, K. Path-Following Control for Thrust-Vectored Hypersonic Aircraft. Energies 2023, 16, 2501. [Google Scholar] [CrossRef]
- Chyu, W.J.; Cavin, R.K.; Erickson, L.L. Static and Dynamic Stability Analysis of the Space Shuttle Vehicle-Orbiter; NASA Technical Paper TP 1179; NASA Langley: Hampton, VA, USA, 1978.
- Aprovitola, A.; Luspa, L.; Pezzella, G.; Viviani, A. Optimal design of a next generation high-lift reusable re-entry vehicle. In Proceedings of the 32th Congress of the International Council of the Aeronautical Sciences, ICAS 2021, Shanghai, China, 6–10 September 2021. [Google Scholar]
- Bae, S.; Shin, H.S.; Savvaris, A.; Vaios, L.; Tsourdos, A. Multi-objective suborbit/orbit trajectory optimisation for spaceplanes. Acta Astronaut. 2020, 170, 431–442. [Google Scholar] [CrossRef]
- Figat, M.; Galiński, C.; Kwiek, A. Modular Aeroplane System. A Concept and Initial Investigation. In Proceedings of the 28th Congress of the International Council of the Aeronautical Sciences, ICAS, Brisbane, Australia, 23–28 September 2012. [Google Scholar]
- Galiński, C.; Goetzendorf-Grabowski, T.; Mieszalski, D.; Stefanek, L. A concept of two-staged spaceplane for suborbital tourism. Trans. Inst. Aviat. 2007, 191, 33–42. [Google Scholar]
- Lamar, J.E. The Use and Characteristics of Vortical Flows Near a Generating Aerodynamic Surface: A Perspective. Prog. Aerosp. Sci. 1998, 34, 167–217. [Google Scholar] [CrossRef]
- Polhamus, E.C. A Concept of the Vortex Lift of Sharp-Edge Delta Wings Based on a Leading-Edge-Suction Analogy; NASA Technical Note NASA-TN-D-3767; NASA Langley: Hampton, VA, USA, 1966.
- Kwiek, A.; Figat, M. An investigation into directional characteristics of the rocket plane in a tailless configuration. CEAS Space J. 2022, 1–14. [Google Scholar] [CrossRef]
- Kwiek, A. Study on Control and Stability of the Rocket Plane to Space Tourism. In Proceedings of the 29th Congress of the International Council of the Aeronautical Sciences, ICAS, St. Petersburg, Russia, 7–12 September 2014. [Google Scholar]
- Kwiek, A.; Galinski, C.; Bogdański, K.; Hajduk, J.; Tarnowski, A. Results of simulation and scaled flight tests performed on a rocket-plane at high angles of attack. Aircr. Eng. Aerosp. Technol. 2021, 93, 1445–1459. [Google Scholar] [CrossRef]
- Goetzendorf-Grabowski, T.; Mieszalski, D.; Marcinkiewicz, E. Stability analysis using SDSA tool. Prog. Aerosp. Sci. 2011, 47, 636–646. [Google Scholar] [CrossRef]
- MGAERO. A Cartesian Multigrid Euler Code for flow Around Arbitrary Configurations—User’s Manual Version 3.1.4; Analytical Methods, Inc.: Redmond, WA, USA, 2001. [Google Scholar]
- Kwiek, A.; Figat, M. LEX and wing tip plates’ interaction on the Rocket Plane in tailless configuration. Aeronaut. J. 2016, 120, 255–270. [Google Scholar] [CrossRef]
- Techreport NOAA-S/T 76-1562; U.S. Standard Atmosphere. National Oceanic and Atmospheric Administration: Washington, DC, USA, 1976.
- SDSA—Simulation and Dynamic Stability Analysis Application, Warsaw University of Technology, Poland. 2020. Available online: https://www.meil.pw.edu.pl/add/ADD/Teaching/Software/SDSA (accessed on 1 May 2021).
- Analytical Methods, Inc. MGAERO—Cartesian Grid Euler Method. 2018. Available online: https://www.amiaerollc.com/Software.html (accessed on 1 May 2021).
- Mavriplis, D.J. Three-dimensional unstructured multigrid for the Euler equations. AIAA J. 1992, 30, 1753–1761. [Google Scholar] [CrossRef]
- Witoszyński, C. Travaux de L’Institut Aerodynamique de Varsovie; WUT: Warsaw, Poland, 1932; Volume V, (In Polish and French). [Google Scholar]
- Goetzendorf-Grabowski, T.; Marcinkiewicz, E.; Galiński, C. Comparison of traditionally calculated stabilitycharacteristics with flight test data of PW-6U sailplane. In Proceedings of the 4th CEAS Air & Space Conference, Linköping, Sweden, 16–19 September 2013; pp. 536–543. [Google Scholar]
- Mieloszyk, J.; Tarnowski, A.; Tomaszewski, A.; Goetzendorf-Grabowski, T. Validation of flight dynamic stability optimization constraints with flight tests. Aerosp. Sci. Technol. 2020, 106, 106193. [Google Scholar] [CrossRef]
- Goetzendorf-Grabowski, T. Flight dynamics of unconventional configurations. Prog. Aerosp. Sci. 2023, 137, 100885. [Google Scholar] [CrossRef]
- MIL-F-8785C—Military Specification Flying Qualities of Piloted Airplanes. 1980. Available online: http://everyspec.com/MIL-SPECS/MIL-SPECS-MIL-F/MIL-F-8785C_5295/ (accessed on 10 April 2023).
- Kwiek, A.; Figat, M.; Goetzendorf-Grabowski, T. Preliminary Study on a Design of a Return Flight Trajectory of a Suborbital Vehicle. In Proceedings of the 33rd Congress of the International Council of the Aeronautical Sciences, ICAS, Stockholm, Sweden, 4–9 September 2022. [Google Scholar]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Mass | 2342 | kg |
| Mean Aerodynamic Chord (MAC) | 3.848 | m |
| Wing area (S) | 18.84 | m2 |
| Moment of Inertia (Iy) | 6245 | kg m2 |
| Parameter | Eigenvalues | Nonlinear Model |
|---|---|---|
| Period [s] | 350 | 72 |
| Time to half [s] | 50 | 25 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kwiek, A.; Figat, M.; Goetzendorf-Grabowski, T. The Study of Selected Aspects of the Suborbital Vehicle Return Flight Trajectory. Aerospace 2023, 10, 489. https://doi.org/10.3390/aerospace10050489
Kwiek A, Figat M, Goetzendorf-Grabowski T. The Study of Selected Aspects of the Suborbital Vehicle Return Flight Trajectory. Aerospace. 2023; 10(5):489. https://doi.org/10.3390/aerospace10050489
Chicago/Turabian StyleKwiek, Agnieszka, Marcin Figat, and Tomasz Goetzendorf-Grabowski. 2023. "The Study of Selected Aspects of the Suborbital Vehicle Return Flight Trajectory" Aerospace 10, no. 5: 489. https://doi.org/10.3390/aerospace10050489
APA StyleKwiek, A., Figat, M., & Goetzendorf-Grabowski, T. (2023). The Study of Selected Aspects of the Suborbital Vehicle Return Flight Trajectory. Aerospace, 10(5), 489. https://doi.org/10.3390/aerospace10050489