

Investigation of the Free-Fall Dynamic Behavior of a Rectangular Wing with Variable Center of Mass Location and Variable Moment of Inertia



Abstract
1. Introduction
2. Research Methods and Validations
2.1. Quasi-Steady Analytical Model
2.2. CFD Numerical Method
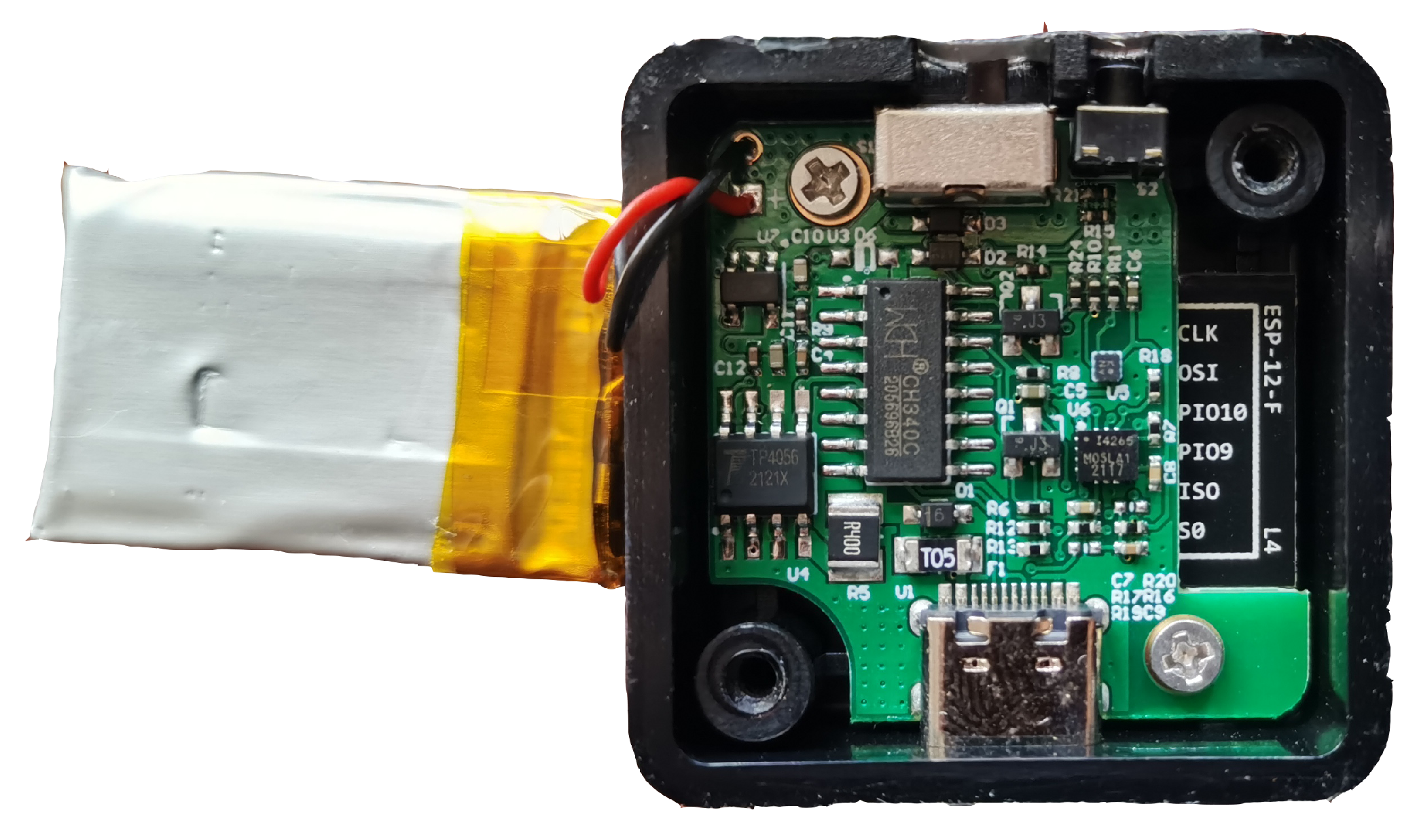
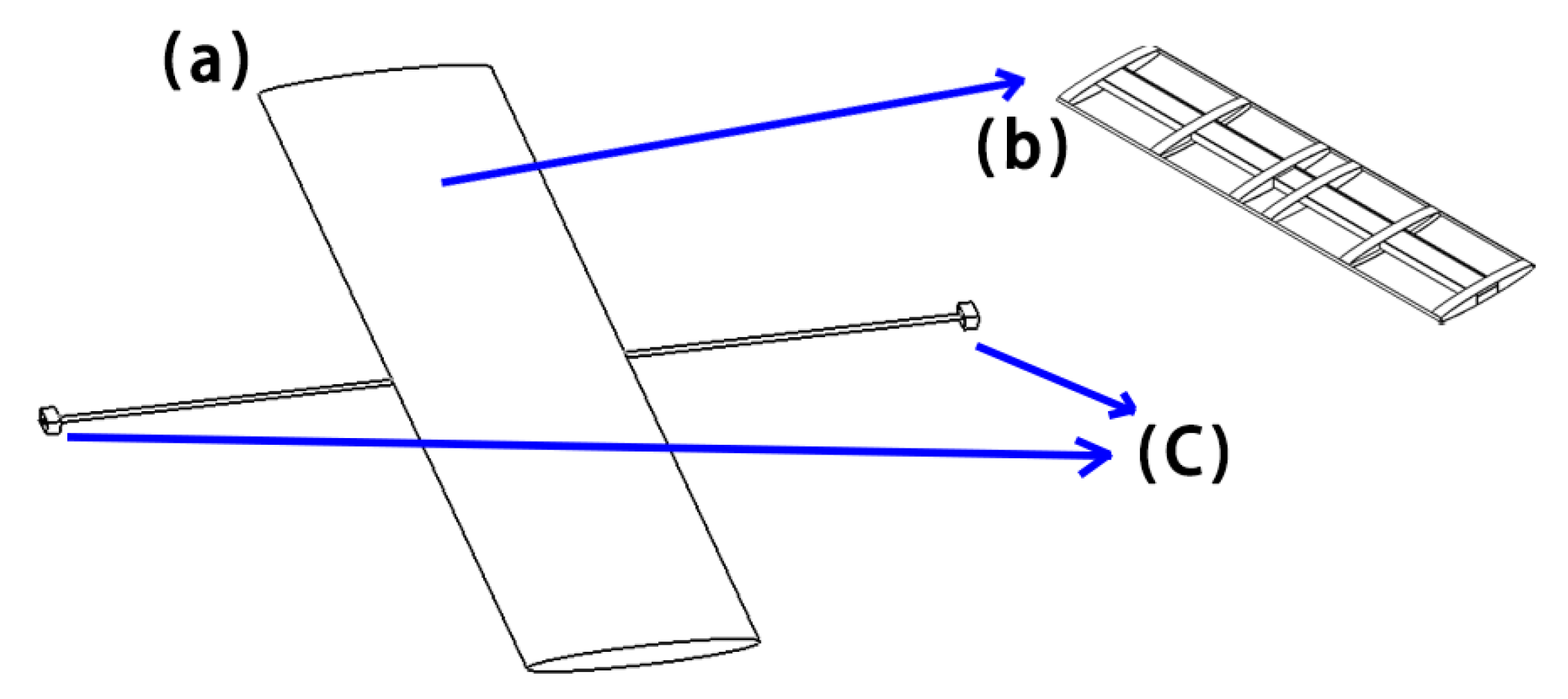
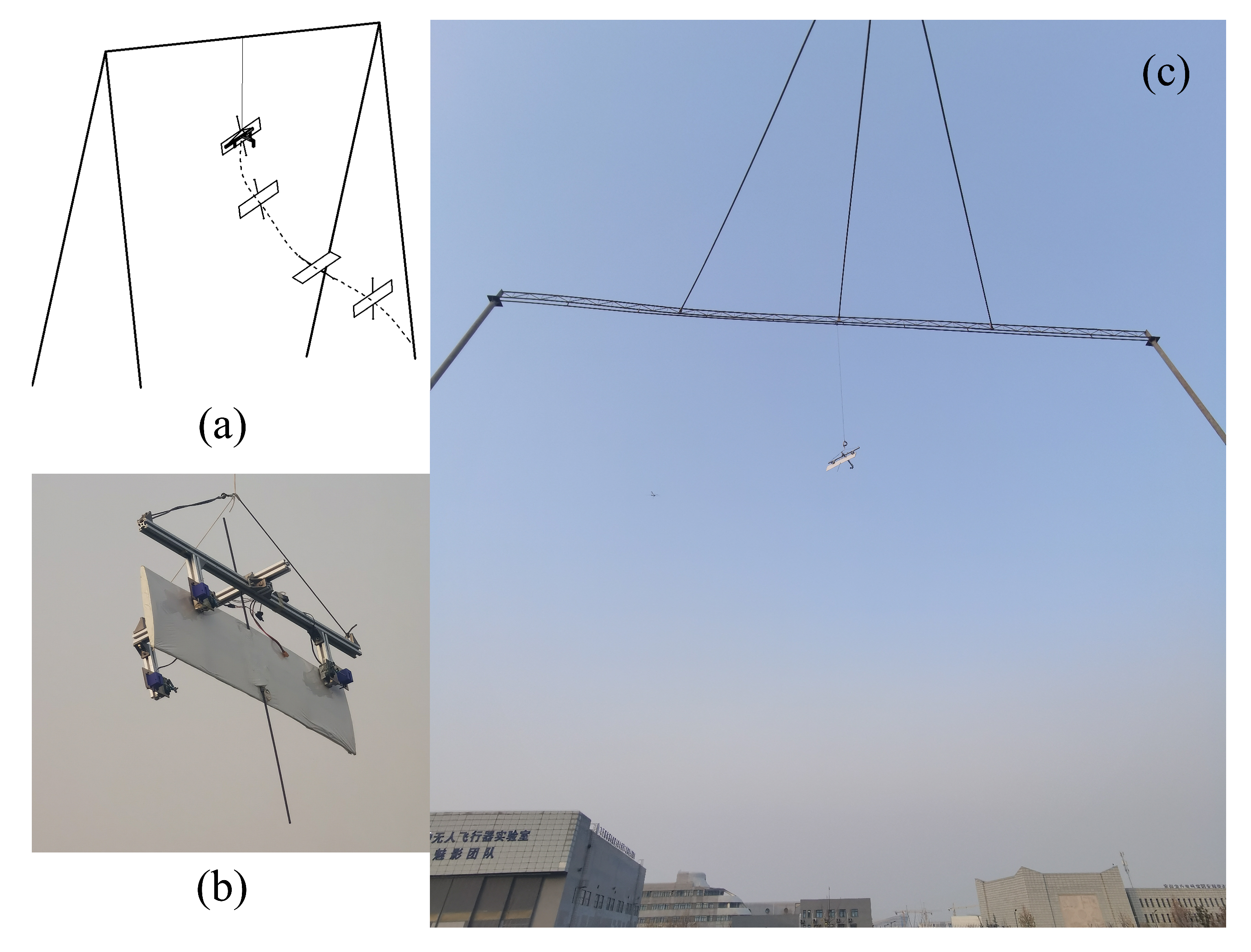
2.3. Experiment Method of Freely Falling Wing
2.4. Validation and Discussion
3. Effect of MOI
3.1. Quasi-Steady Analytical Model
3.2. Experiment Results
4. Effect of COM Position on Freely Falling Wing
4.1. Simulation of the Analytical Model
4.2. Experiment Results
5. Results and Discussion
5.1. Quasi-Steady Analytical Model Results
- 1.
- Effect of MOI: In the case of wings with different MOIs, there exists a limit cycle of tumbling motion that all wings will eventually converge to after releasing, reaching a stable state shown in Figure 11. The phase from the initial state to the final stable tumbling limit cycle is defined as the transition phase. As the MOI of the wing increases, the trajectory of the free-falling wing becomes steeper, and the transition phase becomes longer, meaning that the wing will take more time to converge to the limit cycle.
- 2.
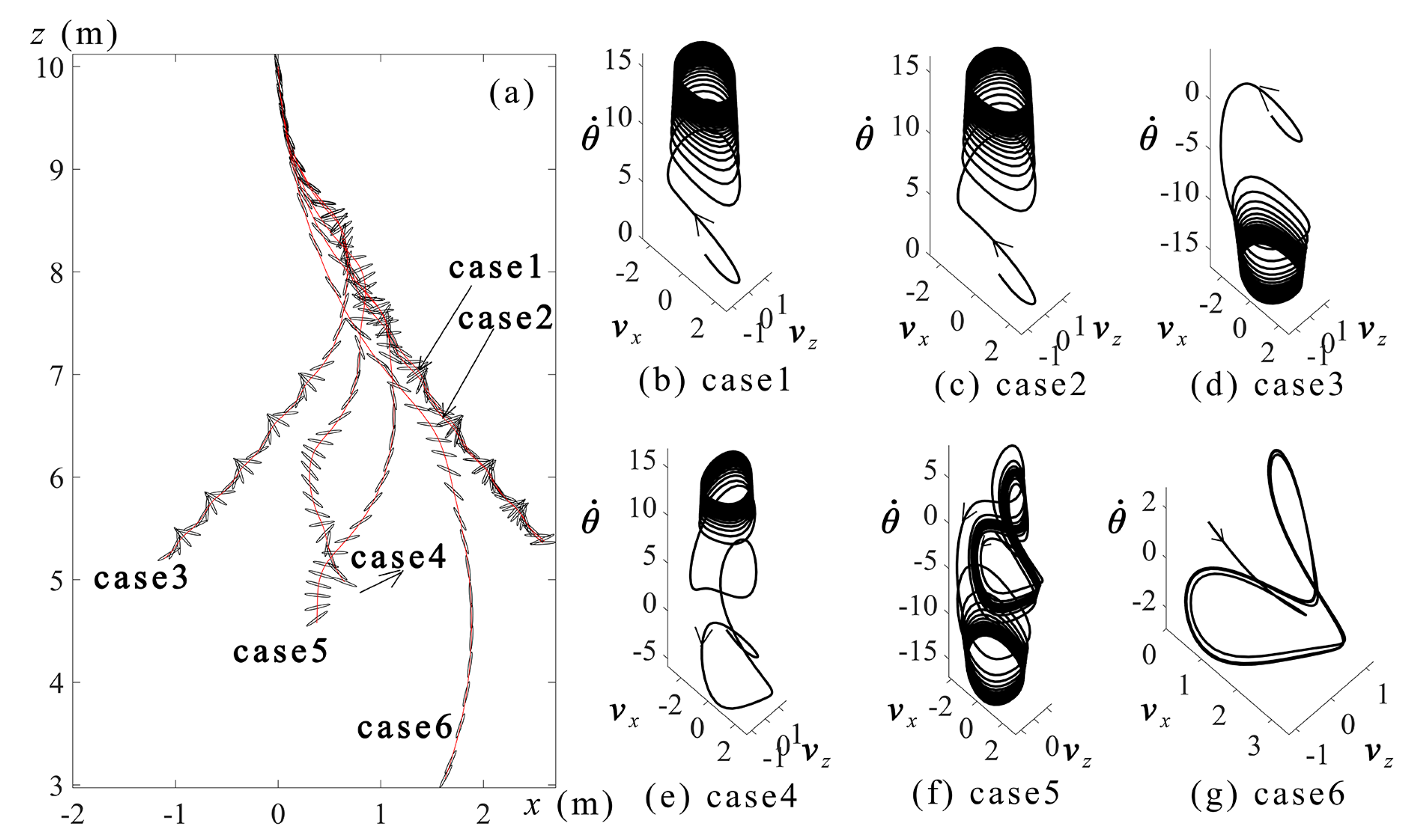
- Effect of COM: When the COM moves forward, the transition phase from the initial state to the tumbling motion limit cycle becomes longer, and the phase trajectory during the transition phase becomes more complex. A new limit cycle emerges when the COM is positioned 40 mm ahead of the wing’s geometric center, as can be seen in Figure 13f, corresponding to the quasi-periodic fluttering motion of the wing. At this point, the limit cycle of the fluttering motion is unstable, and the phase trajectory eventually diverges from this limit cycle, converging towards the limit cycle of the tumbling motion; Figure 15 shows this process well. As the COM continues to move forward, the limit cycle corresponding to the tumbling motion disappears, and the limit cycle of the fluttering motion becomes a stable limit cycle, resulting in the wing freely falling with periodic fluttering motion.
5.2. Experimental Results
- 1.
- Effect of MOI: By symmetrically altering the position of the clump weights block, the MOI of the wing is changed, and tumbling motion is observed under different conditions of MOI, as shown in Figure 12. As the MOI of the wing increases, the trajectory of the freely falling wing becomes steeper, and the transition phase from the initial descent to stable tumbling becomes longer. This observation aligns with the conclusions drawn from the analytical model.
- 2.
- Effect of COM: Experimental results show that maintaining the actual wing trajectory in the plane is challenging because of asymmetrical disturbances. Typically, the wing descends along a spiral path, as shown in Figure 16. As the COM moves forward, the transition phase from the initial state to tumbling motion increases. Further forward movement of the COM results in the fluttering motion of the wing. However, no tumbling motion is observed in the experiment after shifting the COM forward by 40 mm, as shown in Figure 16d.
5.3. Comparison of the Analytical Model with Experimental Results
6. Conclusions
- 1.
- A quasi-steady analytical model was developed based on the Andersen–Pesavento–Wang model. The analytical model was derived in the two-dimensional plane and can reflect the dynamic behavior well in the longitudinal plane during the three-dimensional falling of a real wing.
- 2.
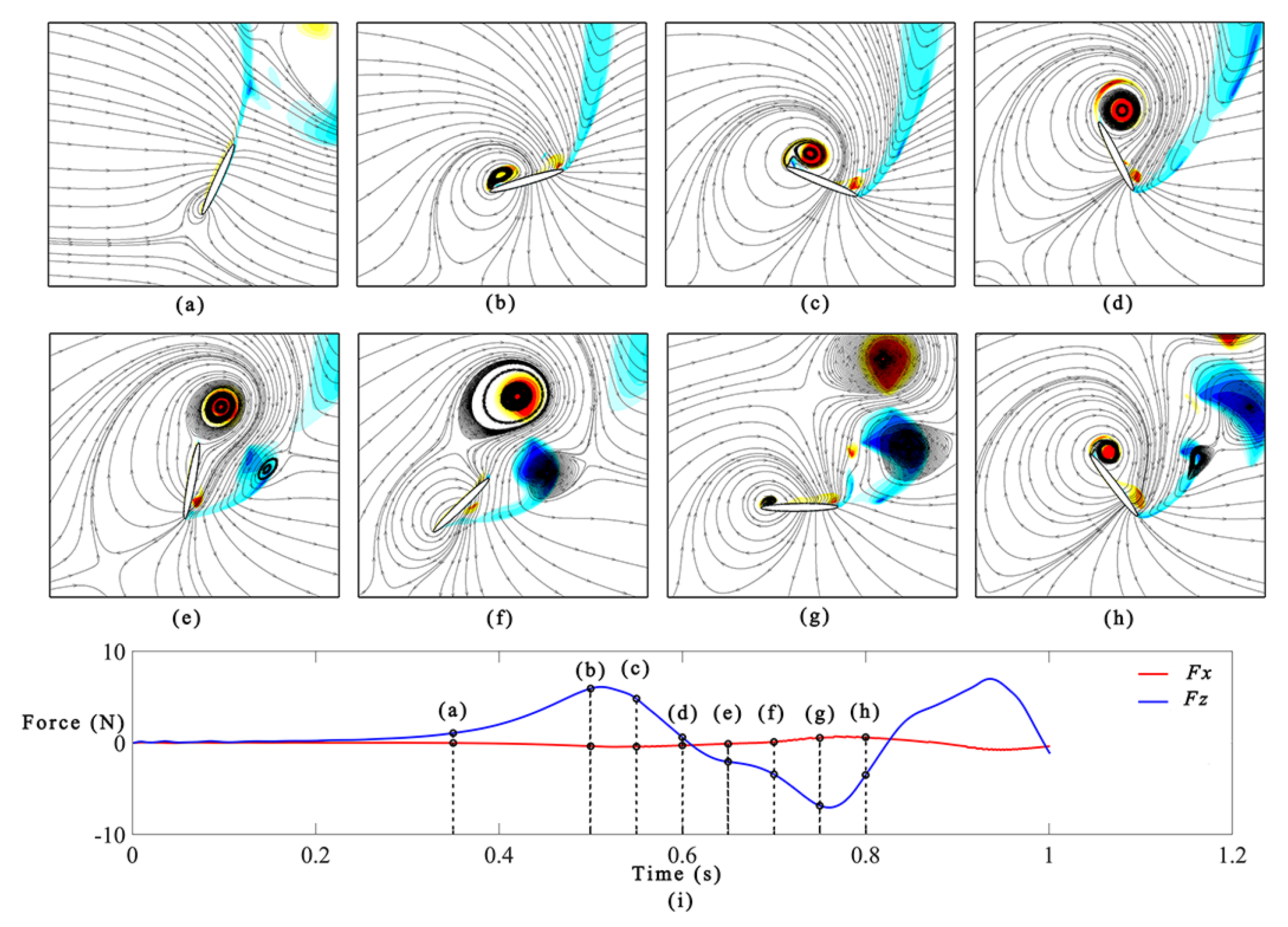
- After deployment, the wing undergoes a transition phase before eventually entering a stable motion, which can be characterized as either tumbling or fluttering, as revealed by the quasi-steady analysis model and experiment method employed in this study. Through CFD analysis, it is observed that, during the transition phase, the shedding frequency of vortices gradually increases and stabilizes, resulting in periodic aerodynamic oscillations due to the cyclic generation and separation of vortices. These periodic oscillations eventually lead to the emergence of a stable periodic motion. Both of these stable motions exhibit relatively low translational velocities. In the case of rolling motion, the pitch rate of the wing remains approximately 15 rad/s. In the case of fluttering motion, the pitch rate oscillates between positive and negative values. Therefore, both of these stable motion patterns should be avoided in the air-drop launched UAVs.
- 3.
- For a wing with elliptical airfoil, the higher the MOI about the -axis, the steeper the trajectory, the lower the angular rate of tumbling, and the shorter time for it staying in the air. For most aircraft, the pitch tumbling is not beneficial. Without changing the shape of the wing and the position of the COM, and only changing the MOI of the wing about the -axis, the initial drop attitude cannot prevent the pitch tumbling of the wing during the falling process.
- 4.
- The position of the COM has a crucial influence on the handling performance and stability of the UAVs. The traditional flight dynamics theory suggests that the forward shift of the COM position can make the vehicle obtain better static stability. For the freely falling wing, the forward shift of the COM will delay the appearance of tumbling, i.e., the transition phase becomes longer. When the forward shift of the COM exceeds a certain value, a new relatively stable motion of falling appears, which is expressed as fluttering in the analytical model, while the wing shows a heaving/ pitching composite motion along the spiral line in the real three-dimensional falling experiment. In the future, for air-drop launch UAVs with relaxed longitudinal static stability, the possibility of its tumbling needs to be considered.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| CFD | Computational Fluid Dynamics |
| COM | Center of Mass |
| DOAJ | Directory of open access journals |
| LD | Linear dichroism |
| MDPI | Multidisciplinary Digital Publishing Institute |
| MOI | Moment of Inertia |
| TLA | Three Letter Acronym |
| UAV | Unmanned Aerial Vehicle |
| Symbols | |
| a | Semimajor axis of the ellipse (m) |
| b | Semiminor axis of the ellipse (m) |
| e | Eccentricity of the airfoil |
| Translational drag force in the direction (N) | |
| Translational drag force in the direction (N) | |
| Circulation (m/s) | |
| g | Gravitational acceleration (m/s) |
| I | Moment of inertia about the -axis (kg·m) |
| J | Added moment of inertia (kg·m) |
| Length of the torque arm (m) | |
| m | Mass of the wing (kg) |
| Added mass coefficient in the direction | |
| Added mass coefficient in the direction | |
| Density of the air (kg/m) | |
| Density of the wing (kg/m) | |
| Volume density of the fluid displaced by the wing (kg/m) | |
| Torque about the -axis (N m) | |
| Speed in the direction of the body coordinate system (m/s) | |
| Speed in the direction of the body coordinate system (m/s) | |
| Subscripts | |
| C | Centroid |
| f | Zone of fluid |
| s | Zone of wing |
| direction of the body coordinate system | |
| -axis vertical to the plane | |
| direction of the body coordinate system |
Appendix A. Method Description
Appendix A.1. Range-Kutta Method
Appendix A.2. The Ω-Method Vortex Identification Criterion
References
- Tao, T.S. Design and Development of a High-Altitude, In-Flight-Deployable Micro-UAV; MIT Lincoln Laboratory: Cambridge, MA, USA, 2013. [Google Scholar]
- Ye, S.-C.; Yao, X.X. On the Other-Power Launch Technology of Unmanned Aerial Vehicles. J. Command Control 2018, 4, 15–21. [Google Scholar]
- Hu, Y.; Yang, Y.; Ma, X.; Li, S. Computational optimal launching control for balloon-borne solar-powered unmanned aerial vehicles in near-space. Sci. Prog. 2020, 103, 0036850419877755. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Guo, H.; Ma, J. Aerodynamic layout optimization design of a barrel-launched UAV wing considering control capability of multiple control surfaces. Aerosp. Sci. Technol. 2019, 93, 105297. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, C.; Yang, H. Neural network-based simulation and prediction of precise airdrop trajectory planning. Aerosp. Sci. Technol. 2022, 120, 107302. [Google Scholar] [CrossRef]
- Wu, M.; Shi, Z.; Xiao, T.; Ang, H. Effect of wingtip connection on the energy and flight endurance performance of solar aircraft. Aerosp. Sci. Technol. 2021, 108, 106404. [Google Scholar] [CrossRef]
- Guo, A.; Zhou, Z.; Zhu, X.; Zhao, X. Coupled Flexible and Flight Dynamics Modeling and Simulation of a Full-Wing Solar-Powered Unmanned Aerial Vehicle. J. Intell. Robot. Syst. 2021, 101, 56. [Google Scholar] [CrossRef]
- Wu, M.; Shi, Z.; Xiao, T.; Ang, H. Energy optimization and investigation for Z-shaped sun-tracking morphing-wing solar-powered UAV. Aerosp. Sci. Technol. 2019, 91, 1–11. [Google Scholar] [CrossRef]
- Acosta, G.; Hassanalian, M. Power minimization of fixed-wing drones for Venus exploration in various altitudes. Acta Astronaut. 2020, 180, 1–15. [Google Scholar] [CrossRef]
- Hu, Y.; Guo, J.; Meng, W.; Liu, G.; Xue, W. Longitudinal control for balloon-borne launched solar powered UAVs in near-space. J. Syst. Sci. Complex. 2022, 35, 802–819. [Google Scholar] [CrossRef]
- Gevers, D.E.; Ratcliff, M.M.; Hatch, J.A. Balloon Launched UAV with Nested Wing for near Space Applications; Technical Report, SAE Technical Paper; SAE: Warrendale, PA, USA, 2007. [Google Scholar]
- Doi, H. Tacom-air-launched multi-role UAV. In Proceedings of the 24th Congress of International Council of the Aeronautical Sciences, Yokohama, Japan, 29 August–3 September 2004. [Google Scholar]
- Wynsberghe, E.V.; Turak, A. Station-keeping of a high-altitude balloon with electric propulsion and wireless power transmission: A concept study. Acta Astronaut. 2016, 128, 616–627. [Google Scholar] [CrossRef]
- Wang, X.; Zeng, G.; Yan, X.; Chen, W.; Li, K.; Yang, Y. A Feasibility Verification Scheme with Flight Analysis for Balloon-borne Launched Unmanned Aerial Vehicles. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020; pp. 966–971. [Google Scholar]
- Fang, R.; Zhang, Y.; Liu, Y. Aerodynamics and flight dynamics of free-falling ash seeds. World J. Eng. Technol. 2017, 5, 105–116. [Google Scholar] [CrossRef]
- Sohn, M.H.; Im, D.K. Flight characteristics and flow structure of the autorotating maple seeds. J. Vis. 2022, 25, 483–500. [Google Scholar] [CrossRef]
- Arranz, G.; Moriche, M.; Uhlmann, M.; Flores, O.; García-Villalba, M. Kinematics and dynamics of the auto-rotation of a model winged seed. Bioinspir. Biomim. 2018, 13, 036011. [Google Scholar] [CrossRef] [PubMed]
- Yue, S.; Nie, H.; Zhang, M.; Wei, X.; Gan, S. Design and landing dynamic analysis of reusable landing leg for a near-space manned capsule. Acta Astronaut. 2018, 147, 9–26. [Google Scholar] [CrossRef]
- Pandula, Z.; Kullmann, L.; Hos, C. Analysis of the Free-Fall of a Disc in Viscous Fluid Using the Techniques of Nonlinear Dynamics. 2002. Available online: https://www.researchgate.net/profile/Csaba-Hos/publication/228585874_Analysis_of_the_free-fall_of_a_disc_in_viscous_fluid_using_the_techniques_of_nonlinear_dynamics/links/5615582a08ae4ce3cc652f6d/Analysis-of-the-free-fall-of-a-disc-in-viscous-fluid-using-the-techniques-of-nonlinear-dynamics.pdf (accessed on 11 December 2002).
- Maxwell, J.C. On a particular case of the descent of a heavy body in a resisting medium. Camb. Dublin Math. J. 1854, 9, 145–148. [Google Scholar]
- Willmarth, W.W.; Hawk, N.E.; Harvey, R.L. Steady and unsteady motions and wakes of freely falling disks. Phys. Fluids 1964, 7, 197–208. [Google Scholar] [CrossRef]
- Smith, E. Autorotating wings: An experimental investigation. J. Fluid Mech. 1971, 50, 513–534. [Google Scholar] [CrossRef]
- Field, S.B.; Klaus, M.; Moore, M.; Nori, F. Chaotic dynamics of falling disks. Nature 1997, 388, 252–254. [Google Scholar] [CrossRef]
- Andersen, A.; Pesavento, U.; Wang, Z.J. Unsteady aerodynamics of fluttering and tumbling plates. J. Fluid Mech. 2005, 541, 65–90. [Google Scholar] [CrossRef]
- Lam, T.; Vincent, L.; Kanso, E. Passive flight in density-stratified fluids. J. Fluid Mech. 2019, 860, 200–223. [Google Scholar] [CrossRef]
- Esteban, L.B.; Shrimpton, J.; Ganapathisubramani, B. Three dimensional wakes of freely falling planar polygons. Exp. Fluids 2019, 60, 114. [Google Scholar] [CrossRef]
- Toupoint, C.; Ern, P.; Roig, V. Kinematics and wake of freely falling cylinders at moderate Reynolds numbers. J. Fluid Mech. 2019, 866, 82–111. [Google Scholar] [CrossRef]
- You, C.S.; Chern, M.J.; Noor, D.Z.; Horng, T.L. Numerical investigation of freely falling objects using direct-forcing immersed boundary method. Mathematics 2020, 8, 1619. [Google Scholar] [CrossRef]
- Kim, J.T.; Jin, Y.; Shen, S.; Dash, A.; Chamorro, L.P. Free fall of homogeneous and heterogeneous cones. Phys. Rev. Fluids 2020, 5, 093801. [Google Scholar] [CrossRef]
- Tam, D.; Bush, J.W.; Robitaille, M.; Kudrolli, A. Tumbling dynamics of passive flexible wings. Phys. Rev. Lett. 2010, 104, 184504. [Google Scholar] [CrossRef]
- Esteban, L.B.; Shrimpton, J.; Ganapathisubramani, B. Edge effects on the fluttering characteristics of freely falling planar particles. Phys. Rev. Fluids 2018, 3, 064302. [Google Scholar] [CrossRef]
- Esteban, L.; Shrimpton, J.; Ganapathisubramani, B. Disks settling in turbulence. J. Fluid Mech. 2020, 883, A58. [Google Scholar] [CrossRef]
- Howison, T.; Hughes, J.; Iida, F. Large-scale automated investigation of free-falling paper shapes via iterative physical experimentation. Nat. Mach. Intell. 2020, 2, 68–75. [Google Scholar] [CrossRef]
- Lee, M.; Lee, S.H.; Kim, D. Stabilized motion of a freely falling bristled disk. Phys. Fluids 2020, 32, 113604. [Google Scholar] [CrossRef]
- Zhou, X.; Yuan, S.; Zhang, G. Eccentric disks falling in water. Phys. Fluids 2021, 33, 033325. [Google Scholar] [CrossRef]
- Kozlov, V.V. On the problem of fall of a rigid body in a resisting medium. Vestnik Moskov. Univ. Ser. I Mat. Mekh. 1990, 79–86. [Google Scholar]
- Tanabe, Y.; Kaneko, K. Behavior of a falling paper. Phys. Rev. Lett. 1994, 73, 1372. [Google Scholar] [CrossRef] [PubMed]
- Belmonte, A.; Eisenberg, H.; Moses, E. From flutter to tumble: Inertial drag and Froude similarity in falling paper. Phys. Rev. Lett. 1998, 81, 345. [Google Scholar] [CrossRef]
- Andersen, A.; Pesavento, U.; Wang, Z.J. Analysis of transitions between fluttering, tumbling and steady descent of falling cards. J. Fluid Mech. 2005, 541, 91–104. [Google Scholar] [CrossRef]
- Wang, K.; Zhou, Z. An investigation on the aerodynamic performance of a hand-launched solar-powered UAV in flying wing configuration. Aerosp. Sci. Technol. 2022, 129, 107804. [Google Scholar] [CrossRef]
- Sedov, L.I. Two-dimensional problems of hydrodynamics and aerodynamics. Mosc. Izd. Nauka 1980. [Google Scholar]
- Wang, Z.J.; Birch, J.M.; Dickinson, M.H. Unsteady forces and flows in low Reynolds number hovering flight: Two-dimensional computations vs robotic wing experiments. J. Exp. Biol. 2004, 207, 449–460. [Google Scholar] [CrossRef]
- Kuznetsov, S.P. Plate falling in a fluid: Regular and chaotic dynamics of finite-dimensional models. Regul. Chaotic Dyn. 2015, 20, 345–382. [Google Scholar] [CrossRef]
- Zakaria, M.Y.; Dos Santos, C.R.; Dayhoum, A.; Marques, F.; Hajj, M.R. Modeling and prediction of aerodynamic characteristics of free fall rotating wing based on experiments. In Proceedings of the International Conference on Aerospace Sciences and Aviation Technology, Cairo, Egypt, 9–11 April 2019; The Military Technical College: Cairo, Egypt, 2019; Volume 18, pp. 1–15. [Google Scholar]
- Rostami, A.B.; Fernandes, A.C. Mathematical model and stability analysis of fluttering and autorotation of an articulated plate into a flow. Commun. Nonlinear Sci. Numer. Simul. 2018, 56, 544–560. [Google Scholar] [CrossRef]
- Wan, H.; Dong, H.; Liang, Z. Vortex formation of freely falling plates. In Proceedings of the 50th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Nashville, Tennessee, 9–12 January 2012; p. 1079. [Google Scholar]
- Liu, C.; Wang, Y.; Yang, Y.; Duan, Z. New omega vortex identification method. Sci. China Phys. Mech. Astron. 2016, 59, 684711. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Case | (mm) | (mm) | (mm) | (kg·m) |
|---|---|---|---|---|
| 1 | −400 | 500 | 4.547 | 0.008 |
| 2 | −300 | 500 | 10.126 | 0.007 |
| 3 | −125 | 500 | 19.89 | 0.006 |
| 4 | 100 | 500 | 32.44 | 0.006 |
| 5 | 250 | 500 | 40.813 | 0.006 |
| 6 | 400 | 500 | 49.138 | 0.008 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dou, Y.; Wang, K.; Zhou, Z.; Thomas, P.R.; Shao, Z.; Du, W. Investigation of the Free-Fall Dynamic Behavior of a Rectangular Wing with Variable Center of Mass Location and Variable Moment of Inertia. Aerospace 2023, 10, 458. https://doi.org/10.3390/aerospace10050458
Dou Y, Wang K, Zhou Z, Thomas PR, Shao Z, Du W. Investigation of the Free-Fall Dynamic Behavior of a Rectangular Wing with Variable Center of Mass Location and Variable Moment of Inertia. Aerospace. 2023; 10(5):458. https://doi.org/10.3390/aerospace10050458
Chicago/Turabian StyleDou, Yilin, Kelei Wang, Zhou Zhou, Peter R. Thomas, Zhuang Shao, and Wanshan Du. 2023. "Investigation of the Free-Fall Dynamic Behavior of a Rectangular Wing with Variable Center of Mass Location and Variable Moment of Inertia" Aerospace 10, no. 5: 458. https://doi.org/10.3390/aerospace10050458
APA StyleDou, Y., Wang, K., Zhou, Z., Thomas, P. R., Shao, Z., & Du, W. (2023). Investigation of the Free-Fall Dynamic Behavior of a Rectangular Wing with Variable Center of Mass Location and Variable Moment of Inertia. Aerospace, 10(5), 458. https://doi.org/10.3390/aerospace10050458