

Identification of Lateral-Directional Aerodynamic Parameters for Aircraft Based on a Wind Tunnel Virtual Flight Test


Abstract
1. Introduction
2. Flight Dynamics Model for Wind Tunnel Virtual Flight Test
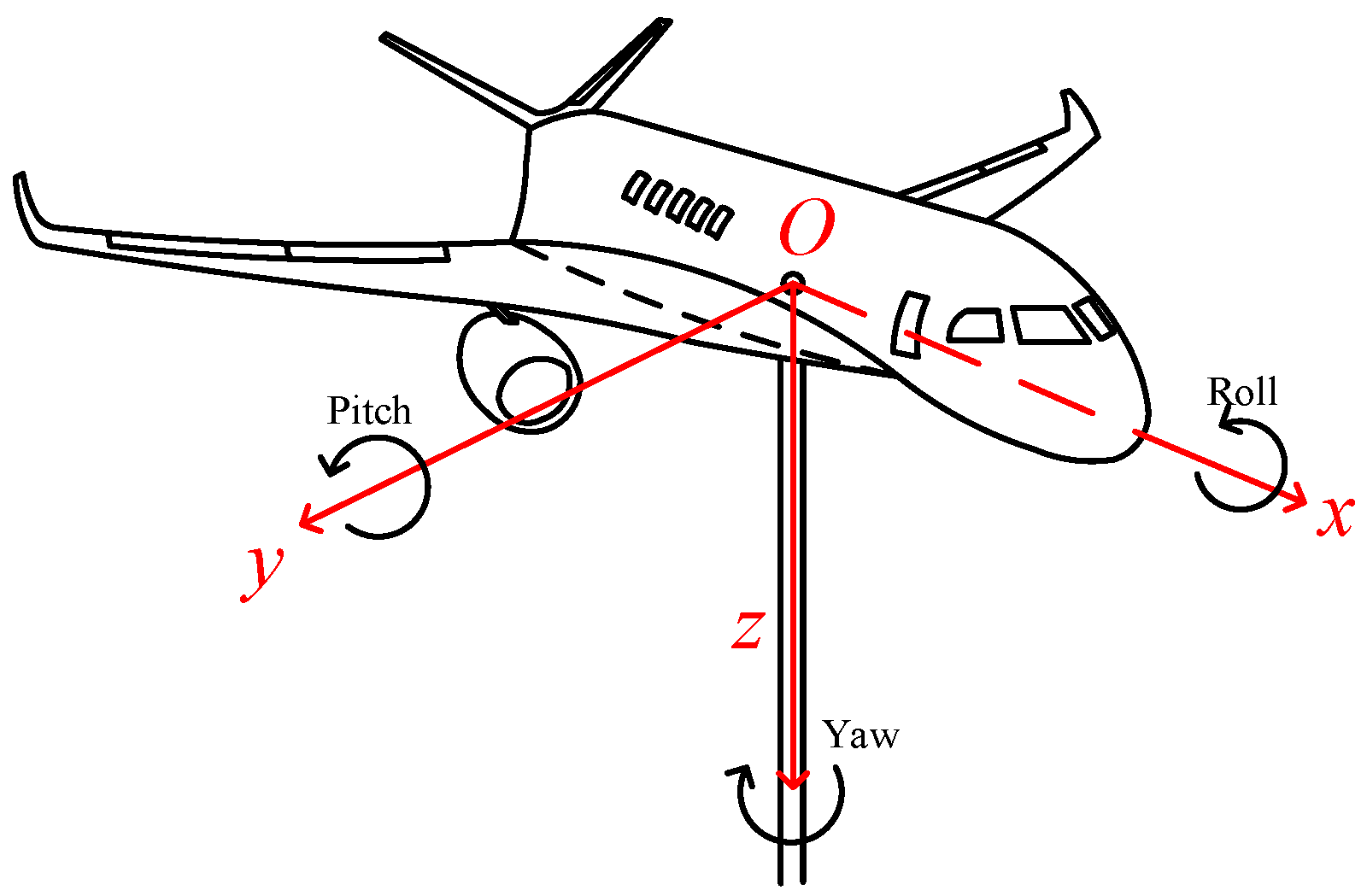
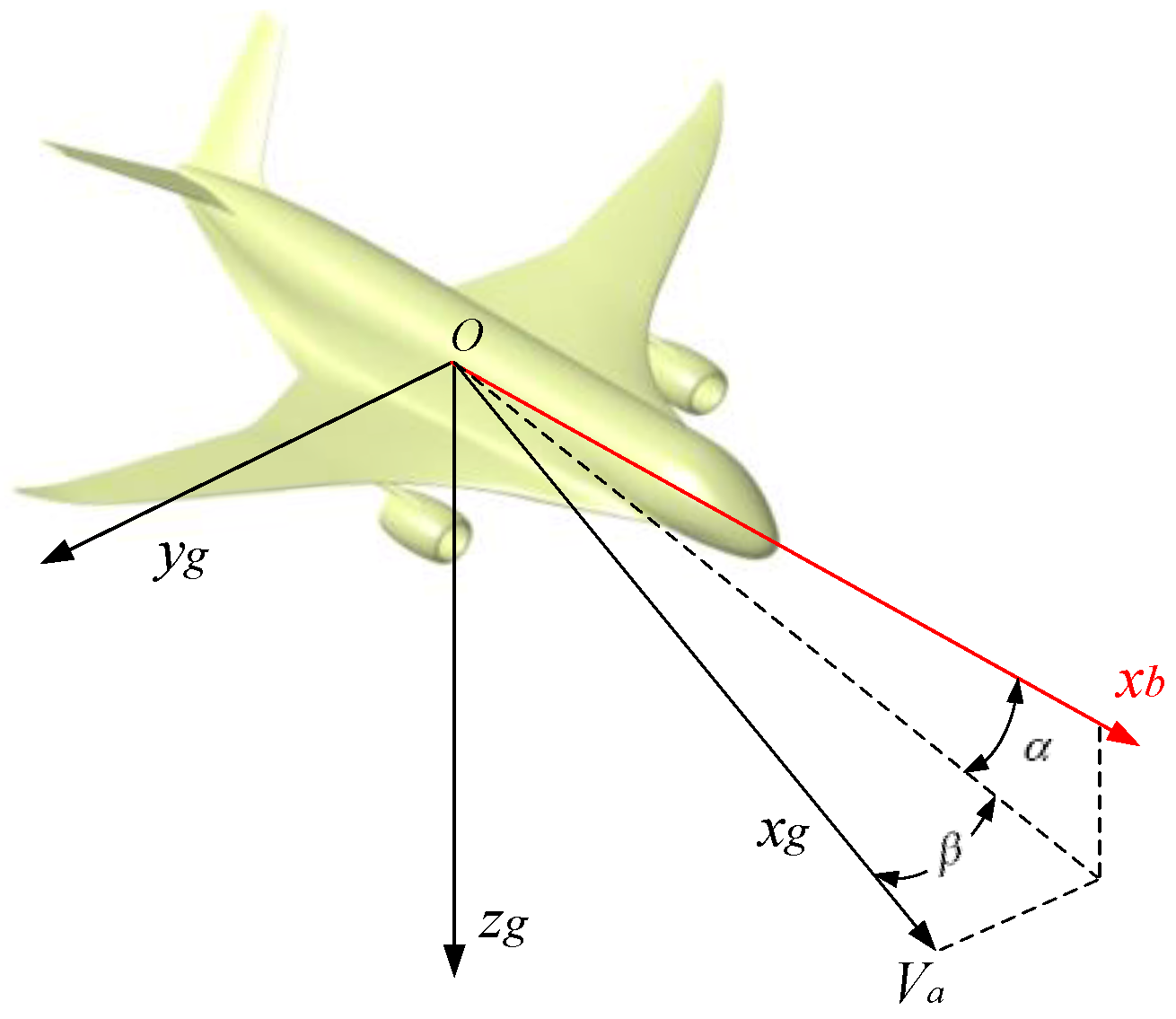
2.1. Flight Dynamics Modelling
2.2. Linearization and Decoupling for Equations of Motion
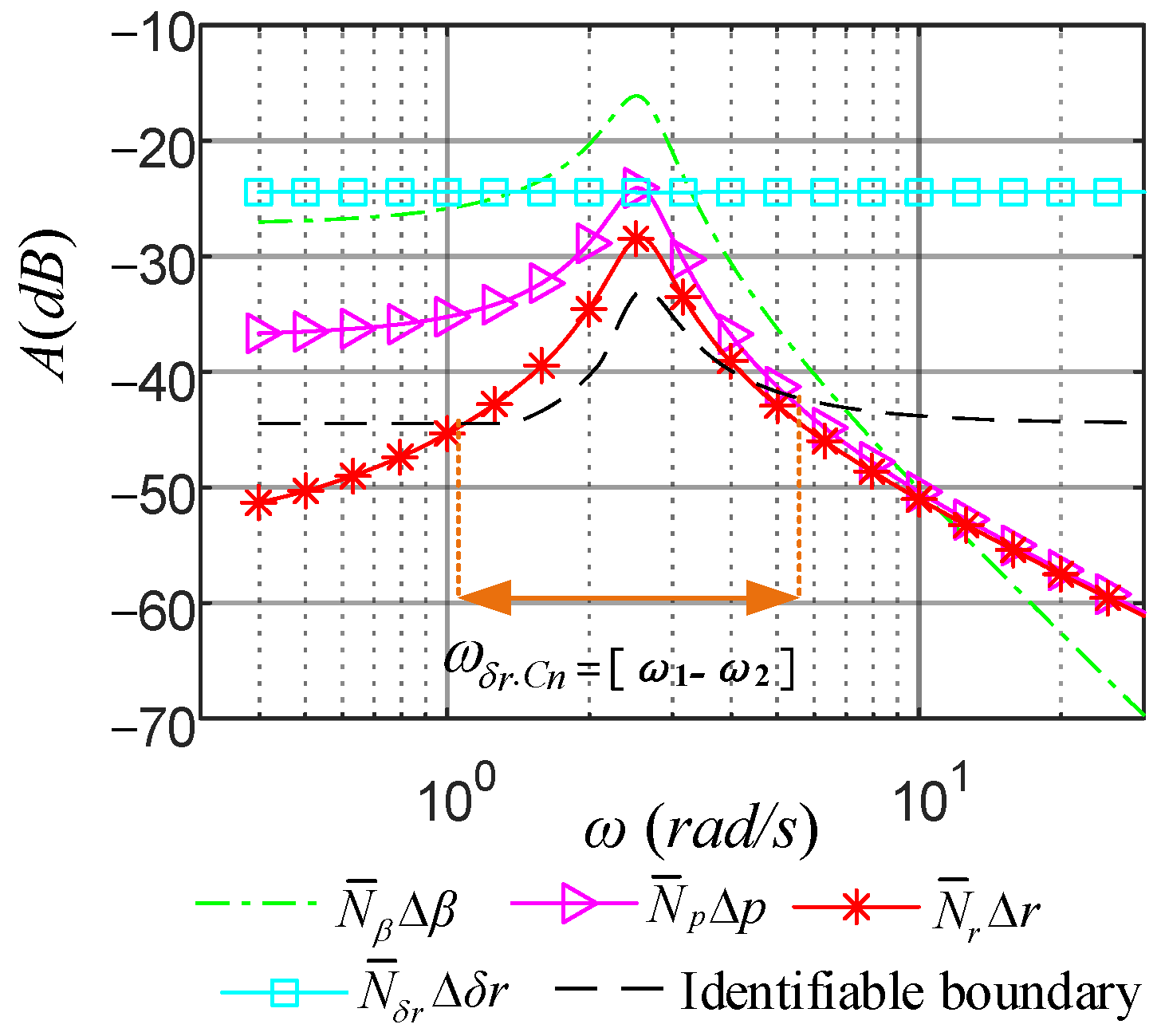
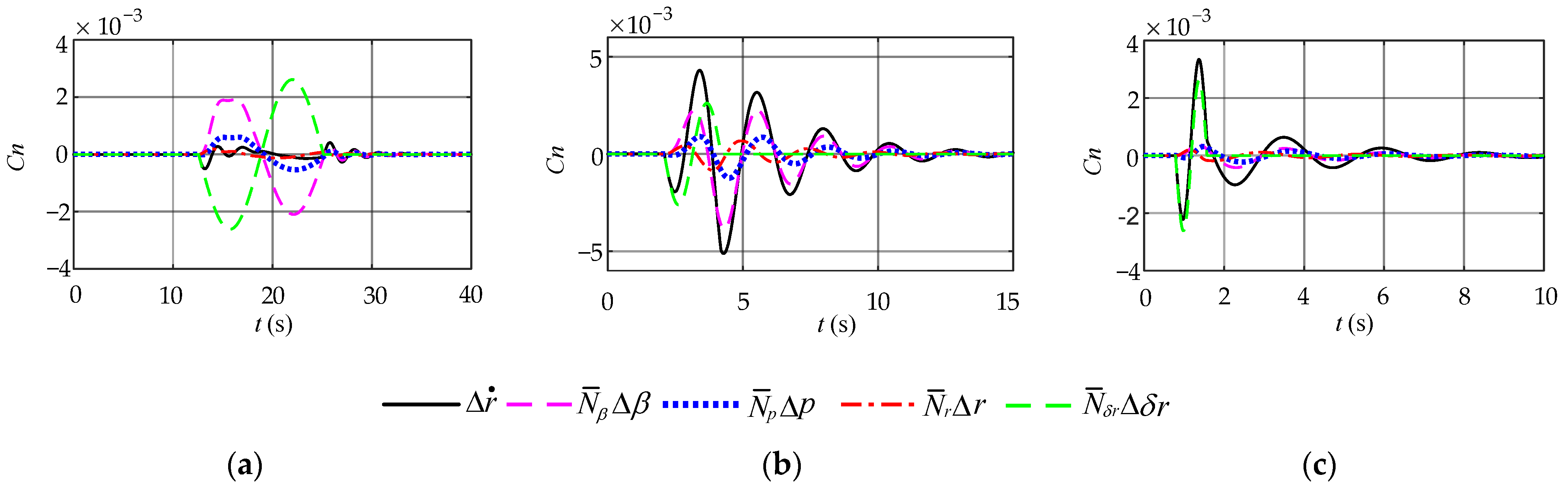
3. Design Method for Excitation Signals Based on Frequency Domain Analysis
3.1. Selection of Excitation Signal Type
3.2. Design of Excitation Signal Parameters
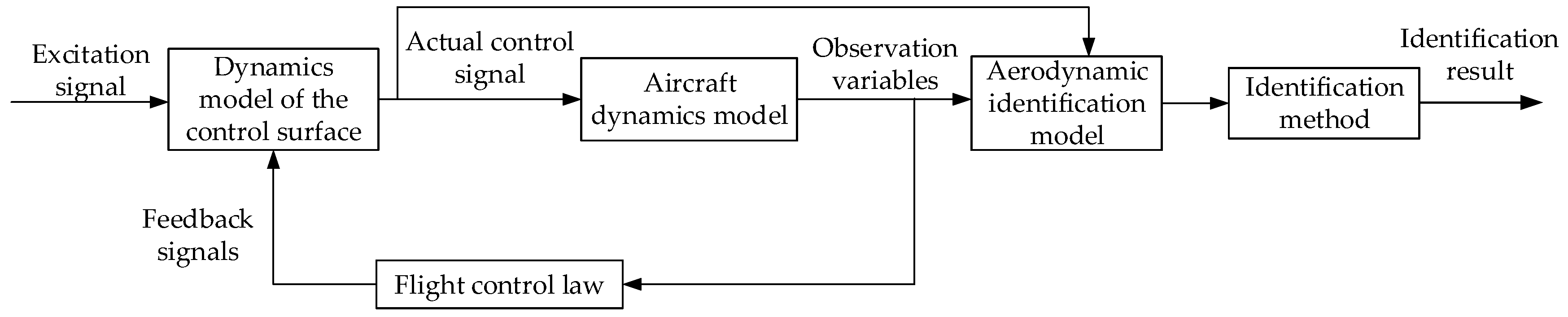
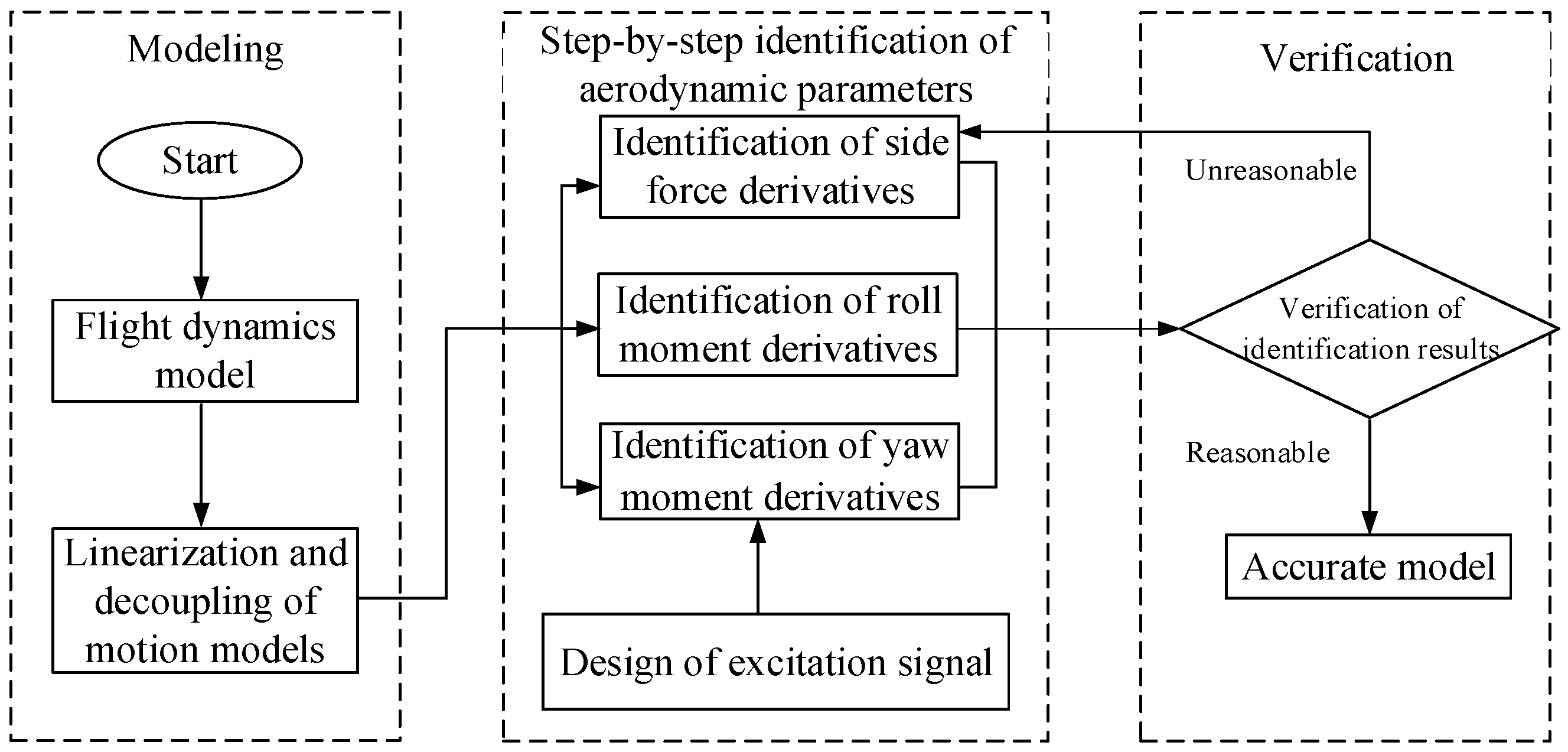
4. Step-by-Step Identification Method for the Aerodynamic Parameters
4.1. Identification Method of Side Force Derivatives
4.2. Identification Method of Rolling and Yawing Moment Derivatives
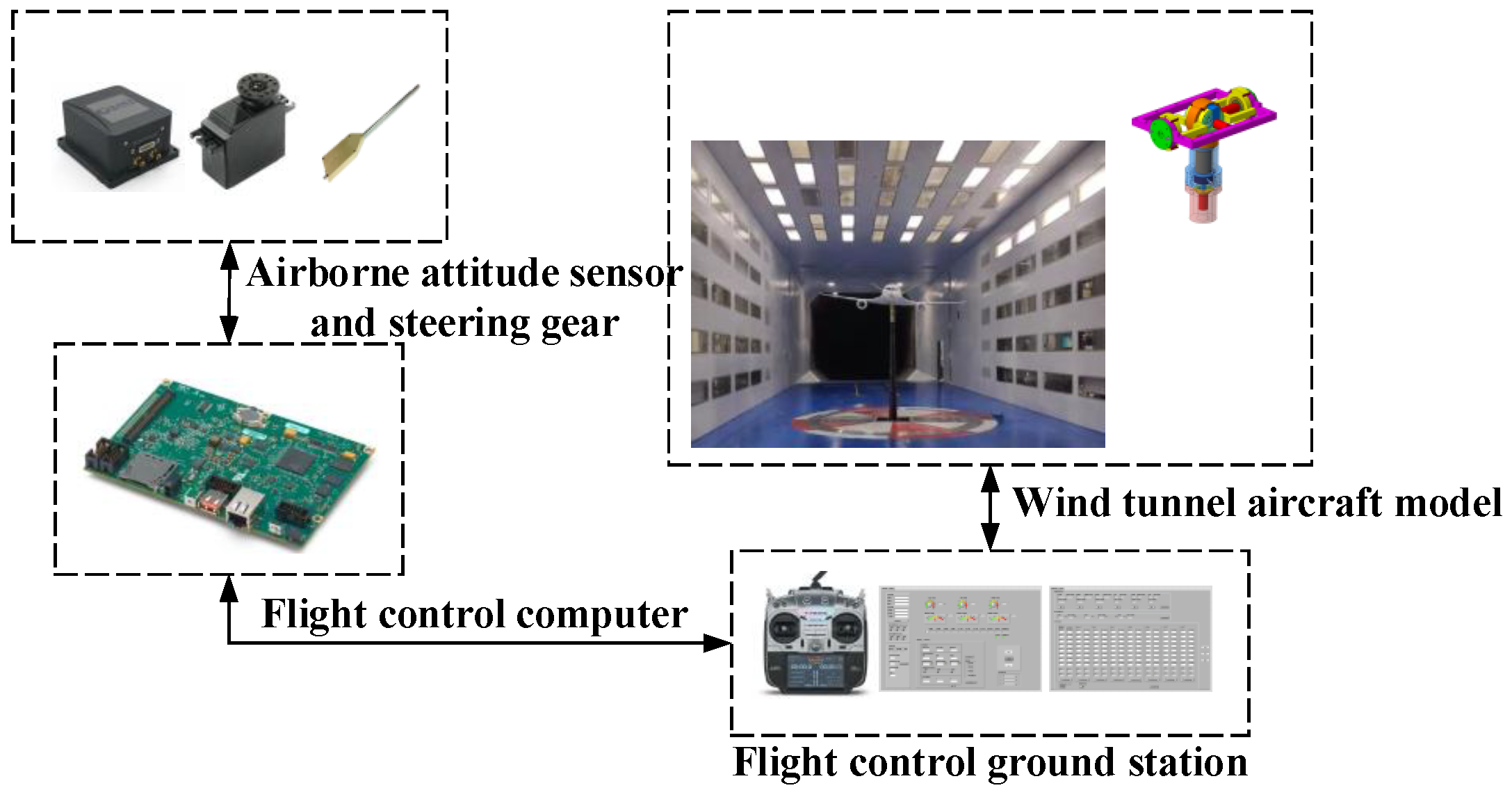
5. Verification of Identification Results Based on the Wind Tunnel Virtual Flight Test
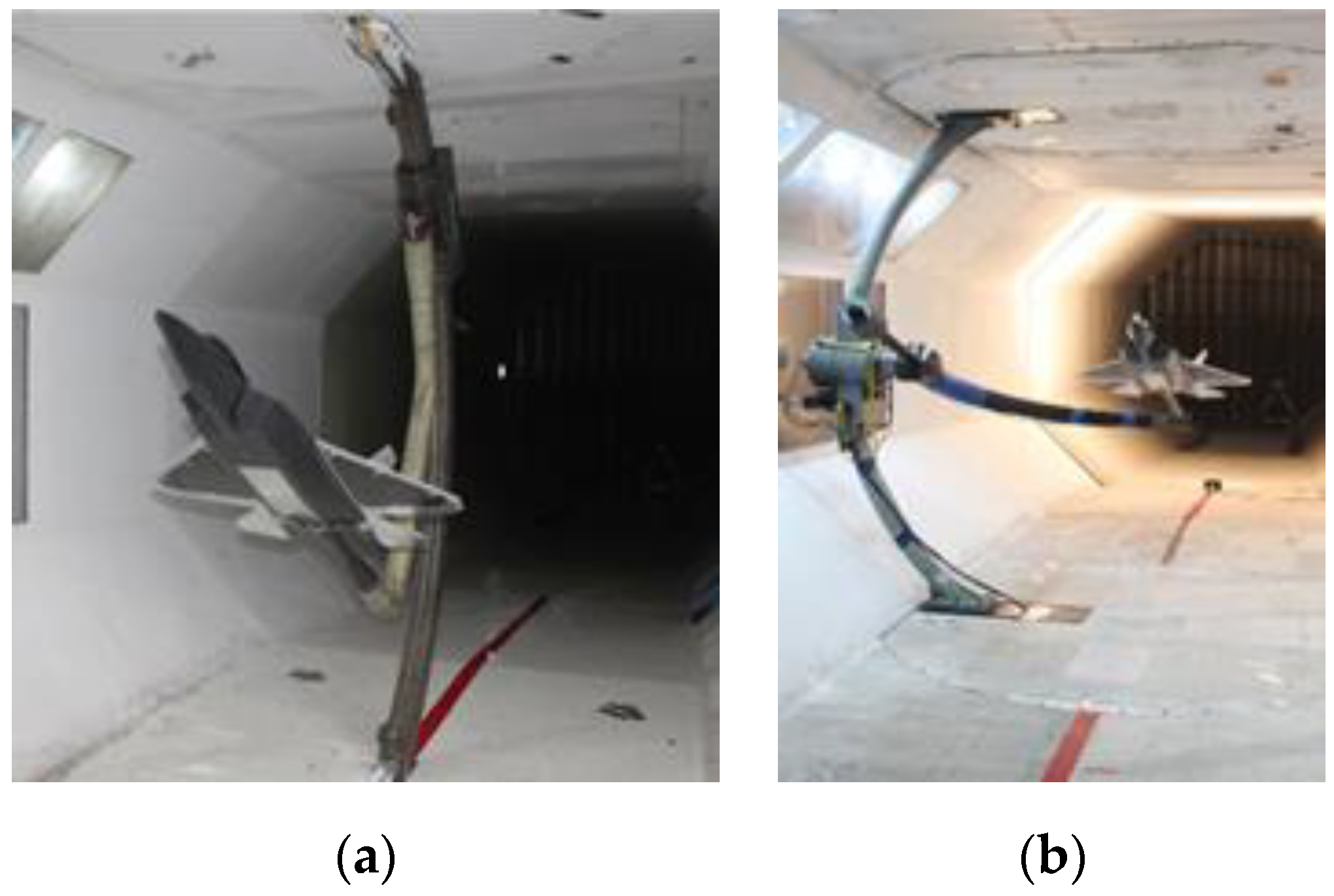
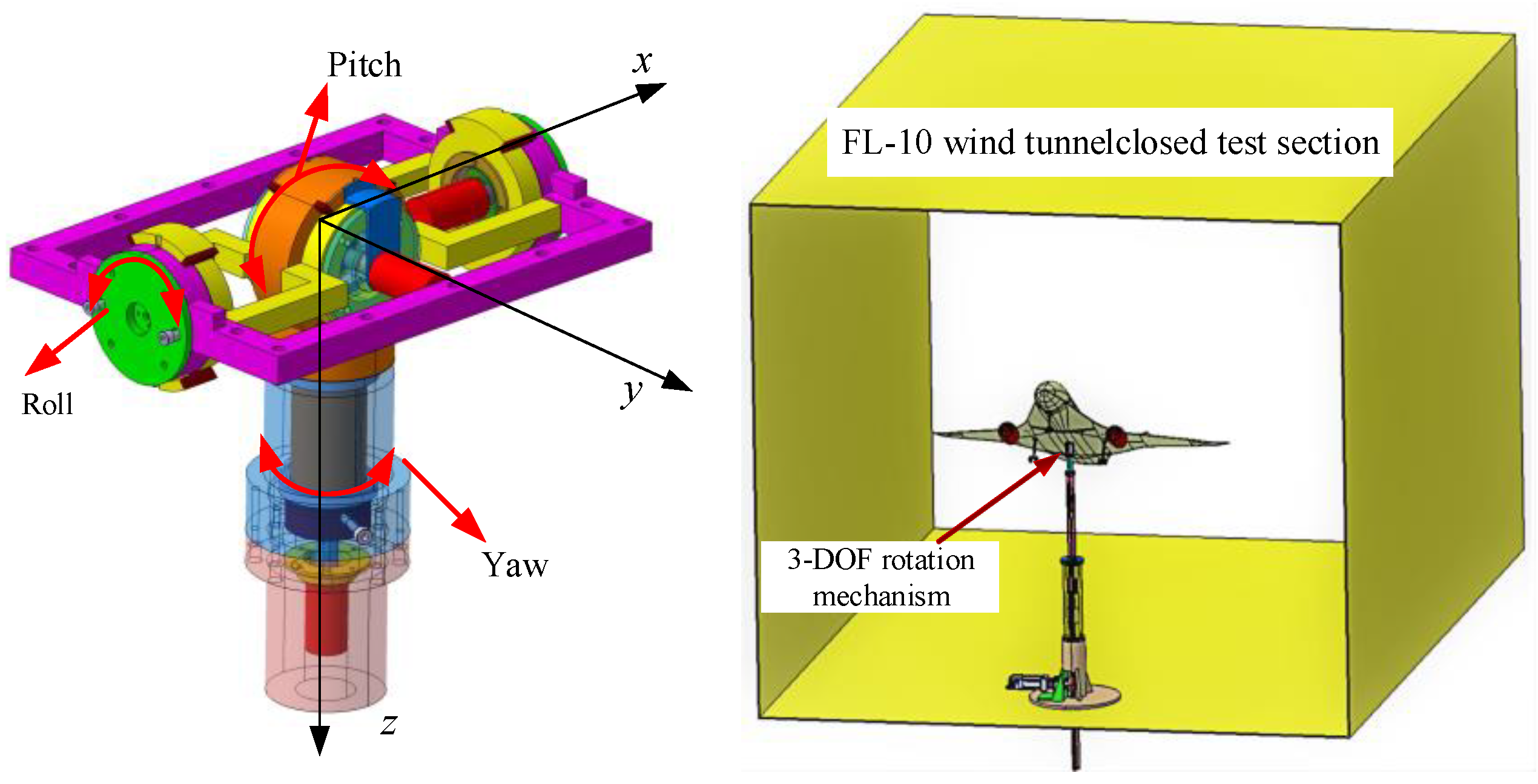
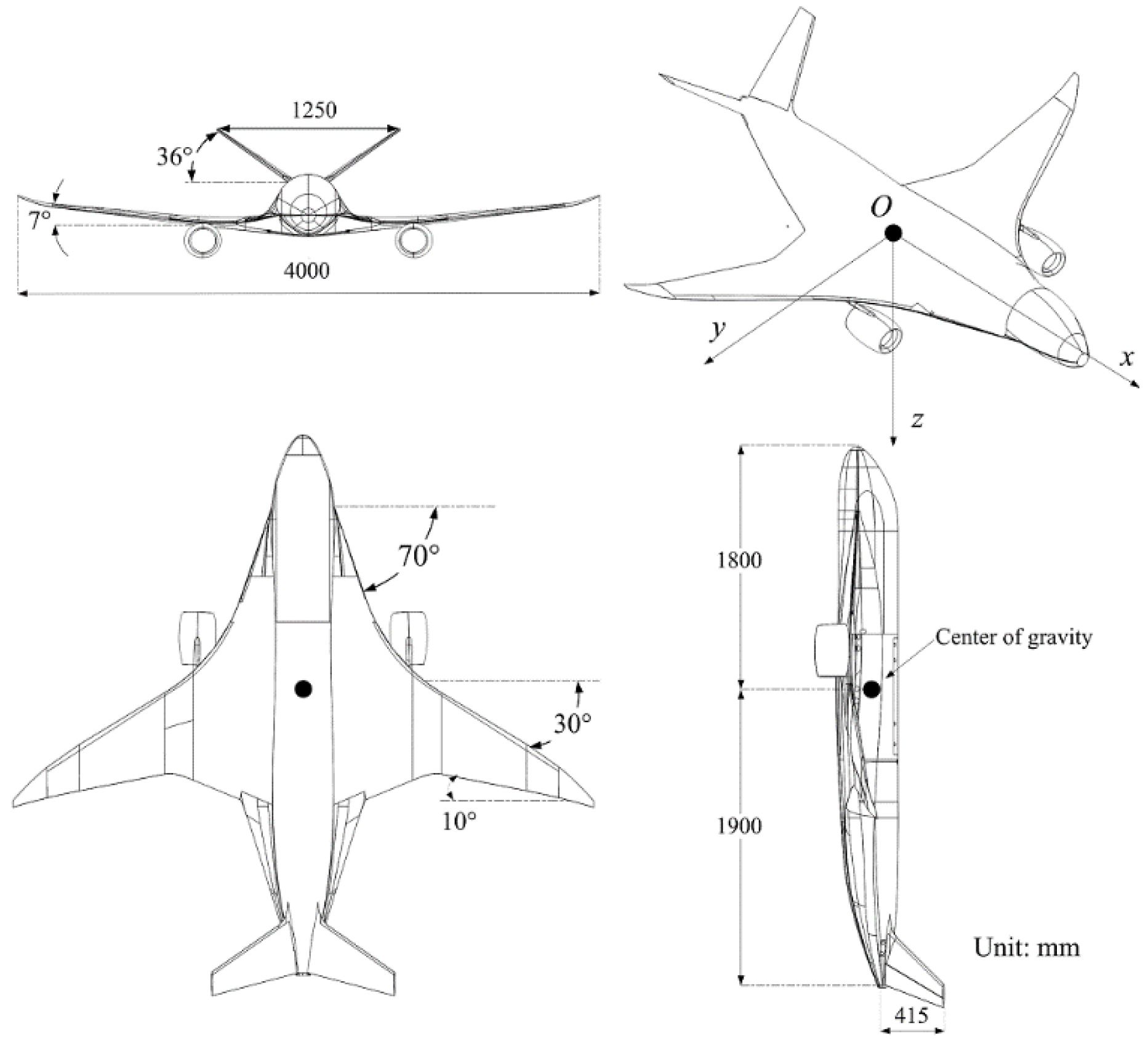
5.1. Facility for Wind Tunnel Virtual Flight Tests
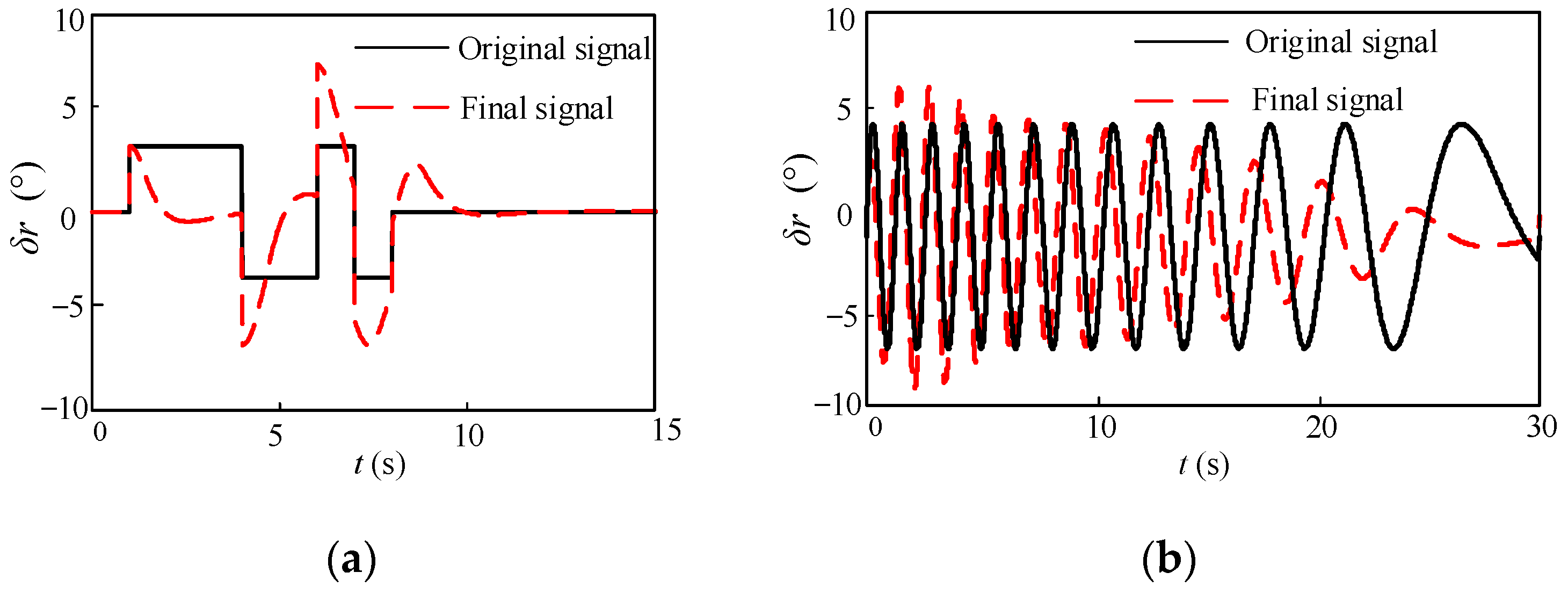
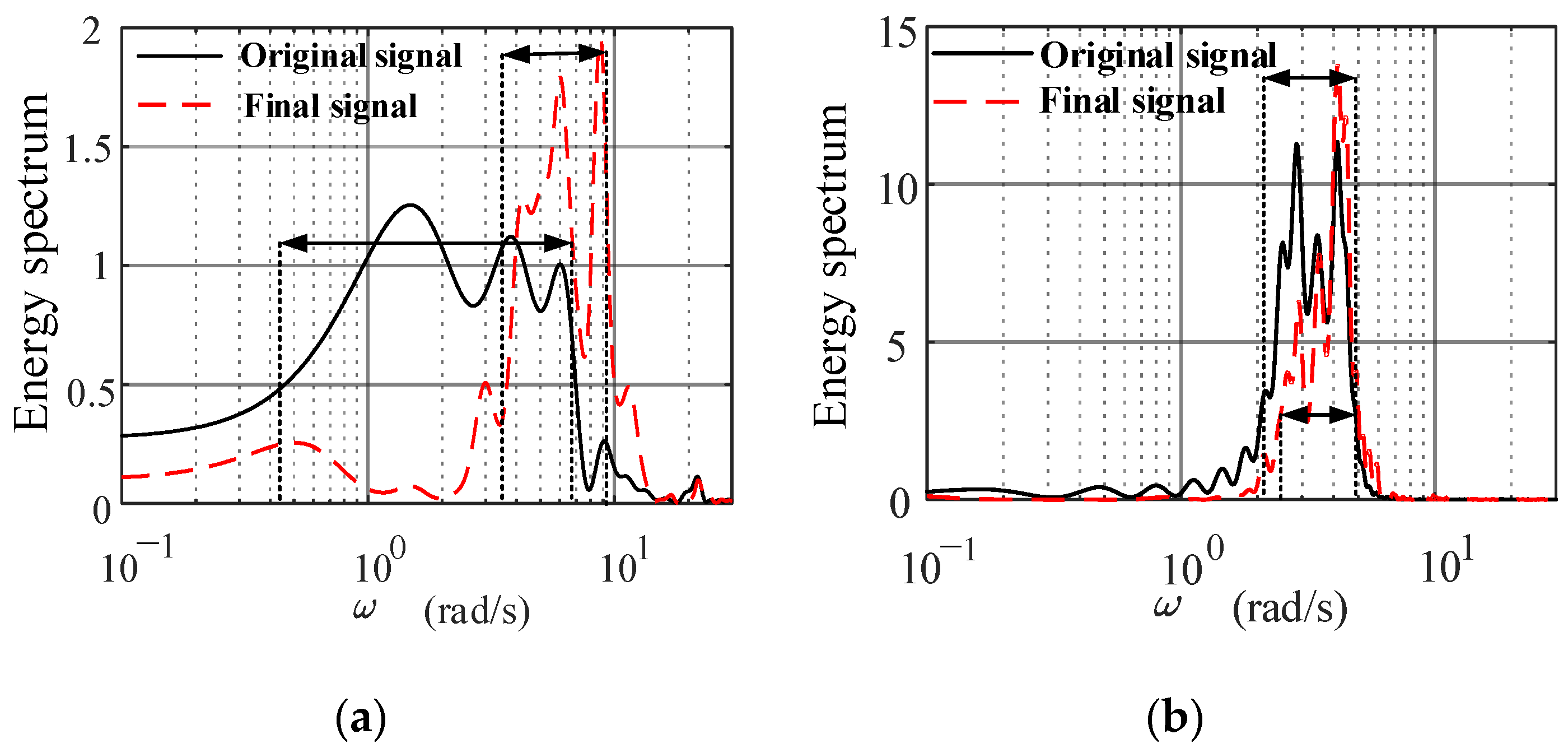
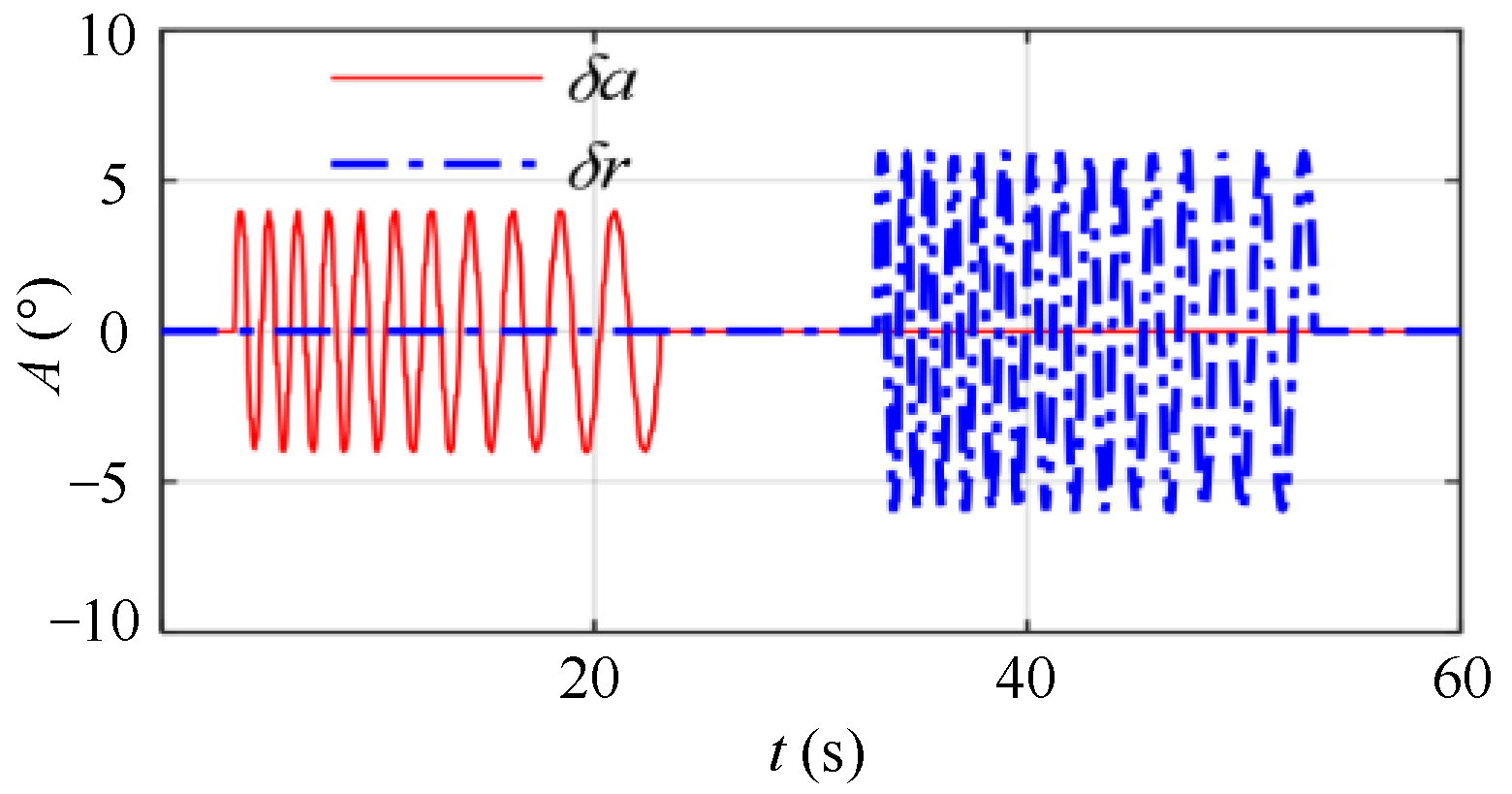
5.2. Design of the Excitation Signal
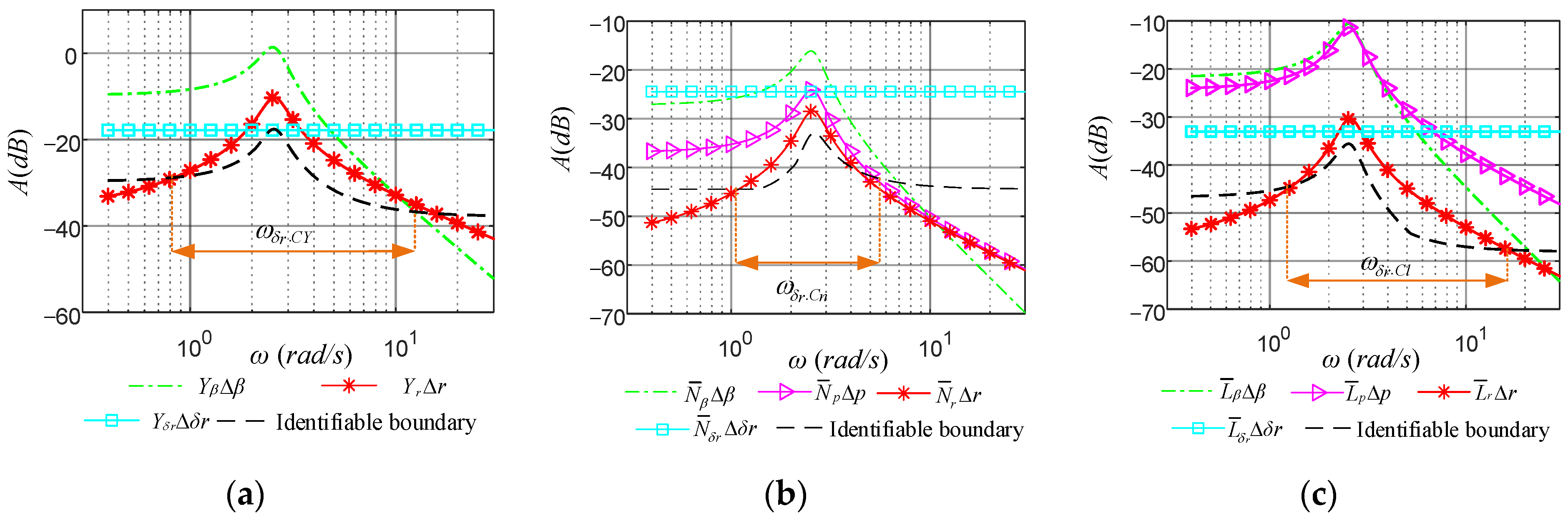
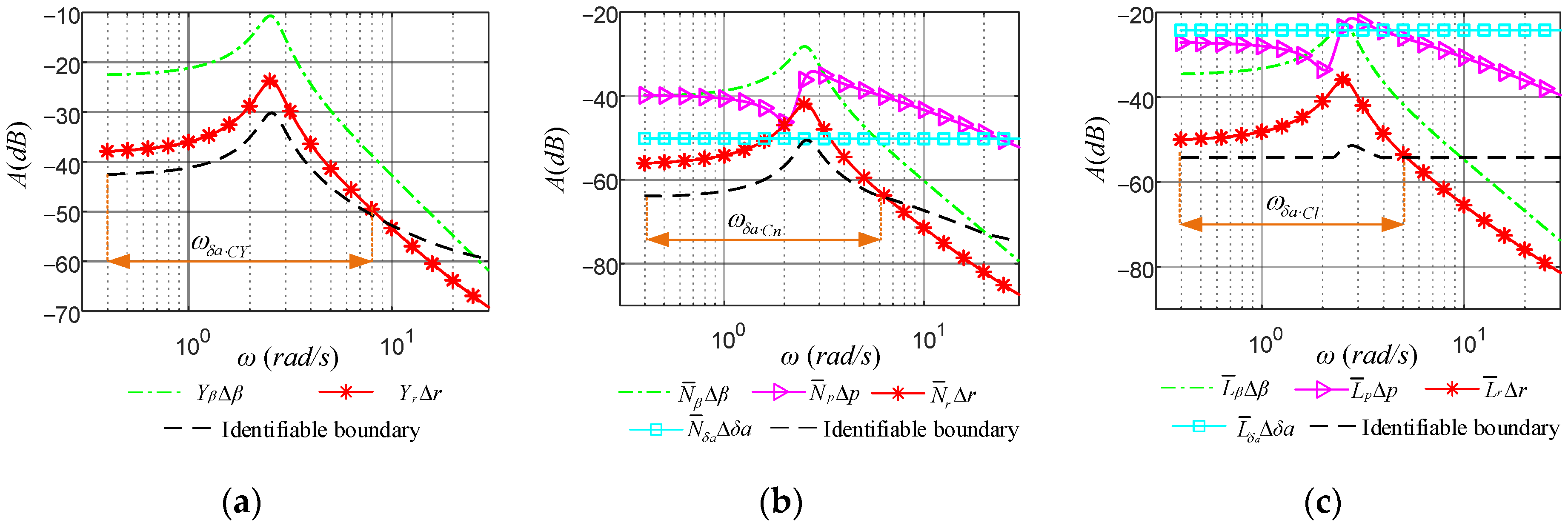
5.2.1. Determination of the Rudder and Aileron Frequency Range
5.2.2. Determination of the Signal Amplitude
5.3. Identification Results of Aerodynamic Derivatives
5.3.1. Identification of Side Force Derivatives
5.3.2. Identification of Rolling and Yawing Moment Derivatives
5.4. Verification of the Modified Identification Model
6. Conclusions
- (1)
- The lateral-directional flight dynamics equations of the wind tunnel virtual flight test model are established. By linearizing the equations of motion to describe the wind tunnel virtual flight test as a decoupled form of the effects of free flight aerodynamic forces and support forces on the model motion, the differences between the lateral-directional dynamics of wind tunnel virtual flight and free flight can be analysed more intuitively, thus establishing a model for the identification of aerodynamic parameters.
- (2)
- Based on the identifiable requirements of aerodynamic derivatives, the amplitude–frequency characteristics of the equations of motion are analysed to establish the type selection and parameter design method of the lateral-directional excitation signal. The frequency of the lateral-directional excitation signal needs to be between 0.5–2 times the frequency of the Dutch roll mode. Therefore, a suitable actuator needs to be selected for different flight states, so that the deflection rate of the control surface is fast enough. In addition, to identify the aerodynamic model at high angle of attack or high sideslip, it is necessary to design appropriate flight control law to ensure the stability of the test model.
- (3)
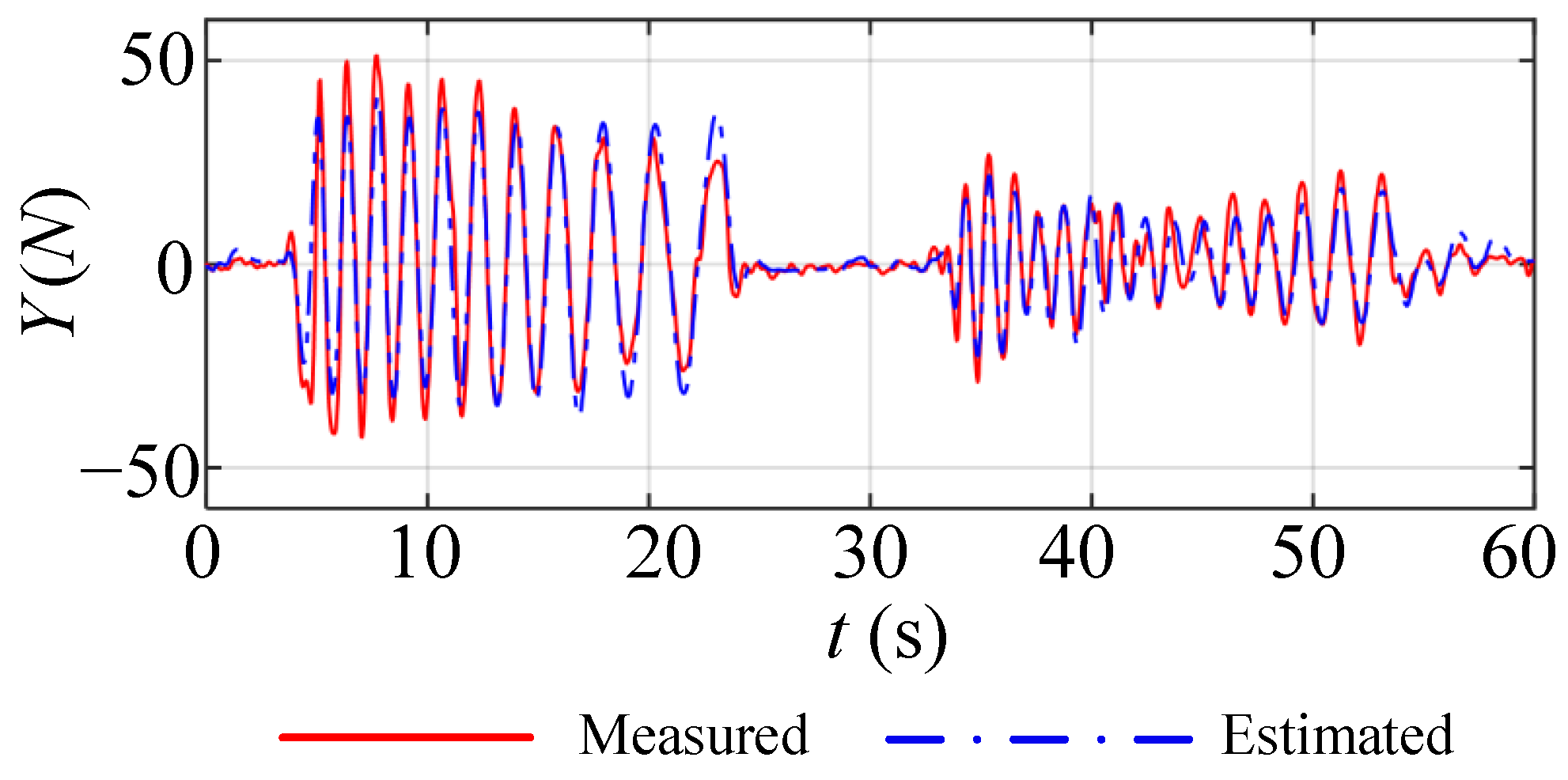
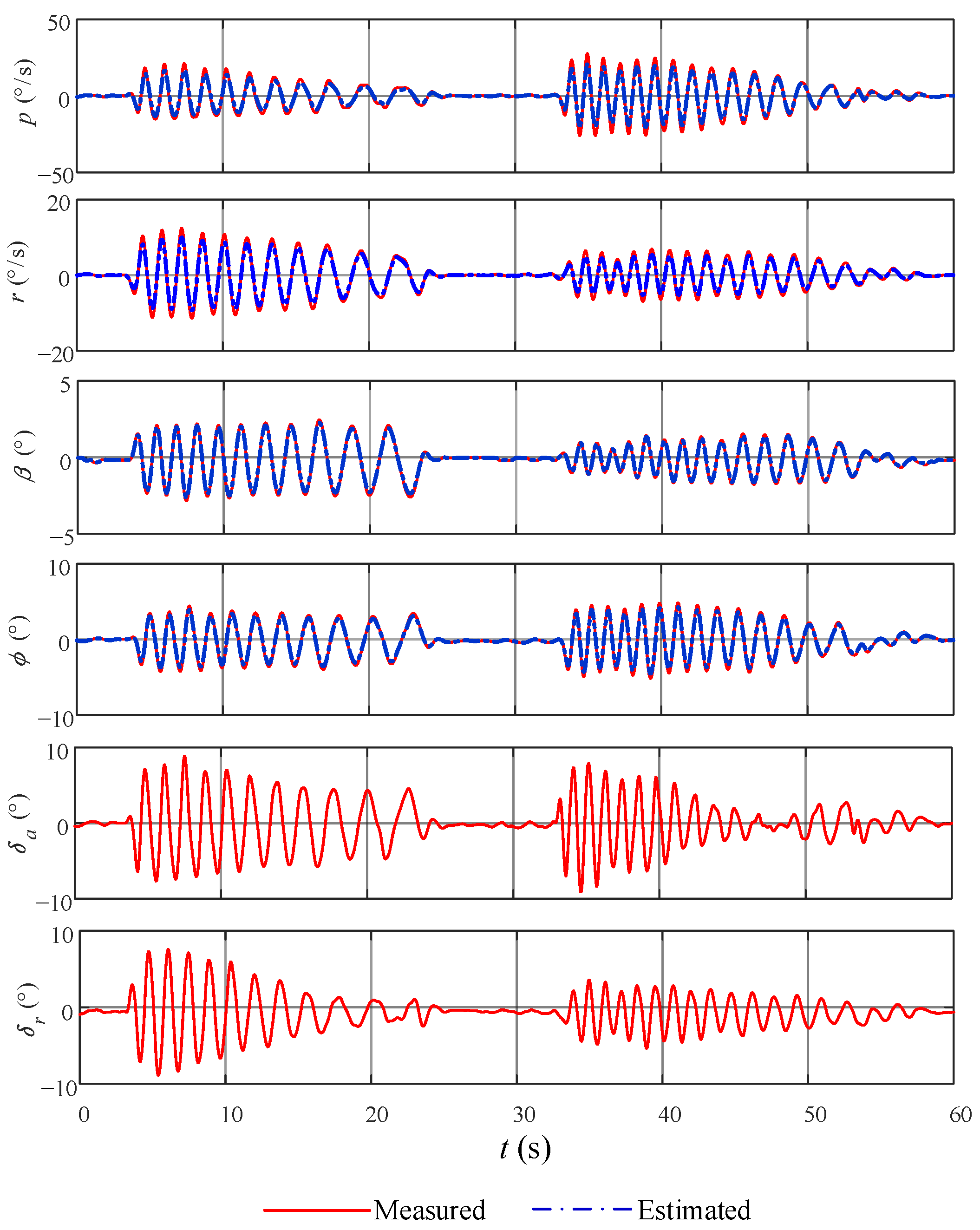
- In this paper, a step-by-step method for the identification of side force, rolling, and yawing moment derivatives is established. The identification of the side force derivatives can be achieved by measuring the aerodynamic force of the test model with a force balance. The differences between the identification results of the aerodynamic derivatives and the conventional wind tunnel measurements are within 10%. The lateral-directional motion response of the identified model is basically consistent with the wind tunnel virtual flight test data, and the GOF of all motion variables are greater than 0.95.
- (4)
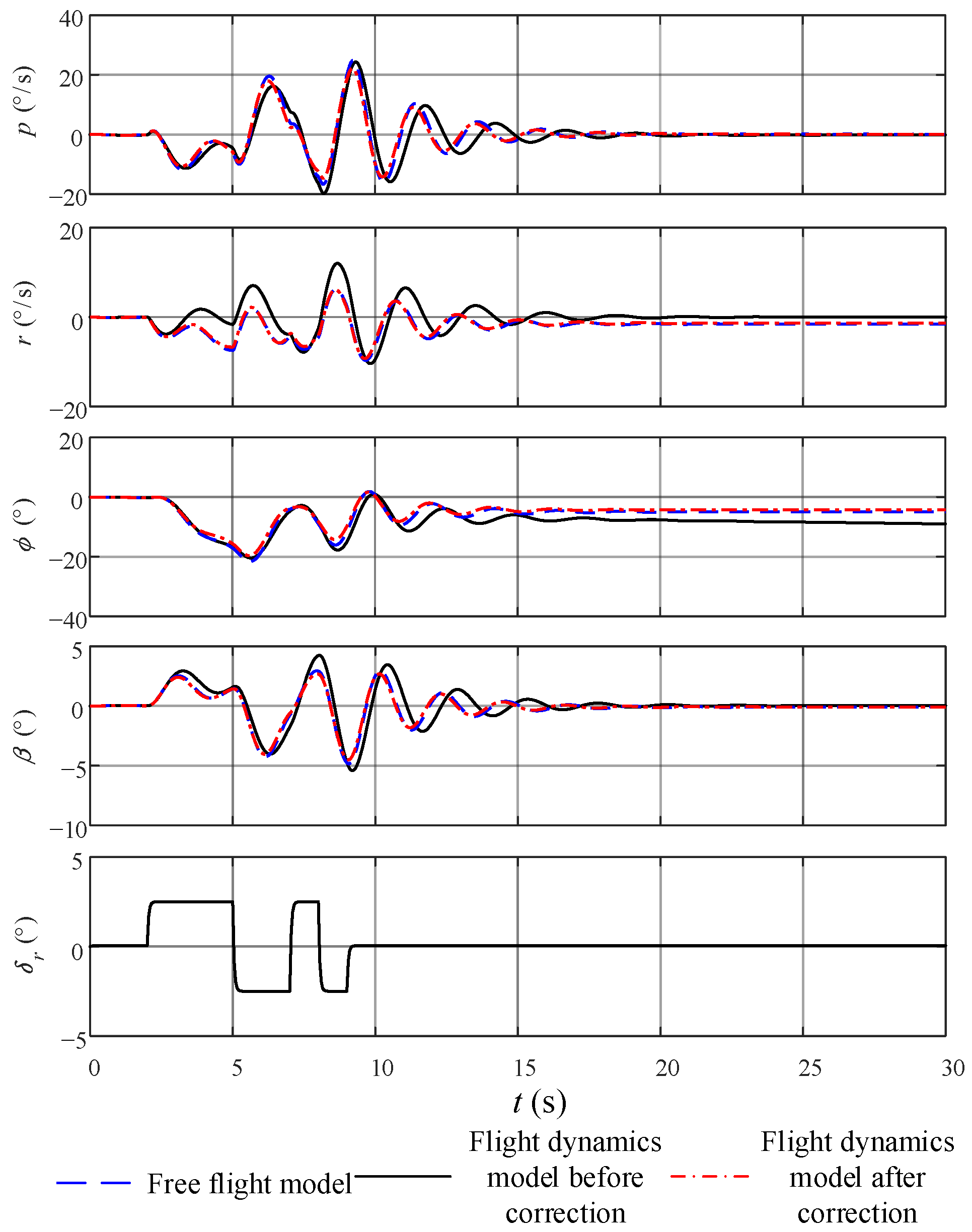
- The modified identification model can well-simulate the lateral-directional motion of the conventional wind tunnel test model, and the goodness-of-fit is higher than 0.95, which verifies the correctness of the proposed method.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Grauer, J.A.; Boucher, M.J. Identification of Aeroelastic Models for the X-56A Longitudinal Dynamics Using Multisine Inputs and Output Error in the Frequency Domain. Aerospace 2019, 6, 24. [Google Scholar] [CrossRef]
- Morelli, E.A. Flight Test Maneuvers for Efficient Aerodynamic Modeling. J. Aircr. 2012, 49, 1857–1867. [Google Scholar] [CrossRef]
- Ratliff, C.; Marquart, E. An Assessment of a Potential Test Technique—Virtual Flight Testing (VFT). In Proceedings of the Flight Simulation Technologies Conference, Baltimore, MD, USA, 7–10 August 1995; p. 3415. [Google Scholar] [CrossRef]
- Wang, L.X.; Tai, S.; Yue, T.; Liu, H.L.; Wang, Y.L.; Bu, C. Longitudinal Aerodynamic Parameter Identification for Blended-Wing-Body Aircraft Based on a Wind Tunnel Virtual Flight Test. Aerospace 2022, 9, 689. [Google Scholar] [CrossRef]
- Guo, L.; Zhu, M.; Nie, B.; Kong, P.; Zhong, C. Initial virtual flight test for a dynamically similar aircraft model with control augmentation system. Chin. J. Aeronaut. 2017, 30, 602–610. [Google Scholar] [CrossRef]
- Fu, J.; Shi, Z.; Gong, Z.; Lowenberg, M.H.; Wu, D.; Pan, L. Virtual flight test techniques to predict a blended-wing-body aircraft in-flight departure characteristics. Chin. J. Aeronaut. 2022, 35, 215–225. [Google Scholar] [CrossRef]
- Barlow, J.B.; Rae, W.H.; Pope, A. Low-Speed Wind Tunnel Testing, 3rd ed.; John Wiley & Sons: New York, NY, USA, 1999; pp. 301–425. [Google Scholar]
- Cen, F.; Li, Q.; Liu, Z.T.; Zhang, L.; Jiang, Y. Post-stall flight dynamics of commercial transport aircraft configuration: A nonlinear bifurcation analysis and validation. Proc. Inst. Mech. Eng. G J. Aerosp. Eng. 2021, 235, 368–384. [Google Scholar] [CrossRef]
- Ignatyev, D.I.; Zaripov, K.G.; Sidoryuk, M.E.; Kolinko, K.A.; Khrabrov, A.N. Wind Tunnel Tests for Validation of Control Algorithms at High Angles of Attack Using Autonomous Aircraft Model Mounted in 3DOF Gimbals. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Washington, DC, USA, 13–17 June 2016; p. 3106. [Google Scholar] [CrossRef]
- Manning, E.I.I.T.; Ratliff, C.; Marquart, E. Bridging the Gap between Ground and Flight Tests—Virtual Flight Testing (VFT). In Proceedings of the Aircraft Engineering, Technology, and Operations Congress, Los Angeles, CA, USA, 19–21 September 1995; p. 3875. [Google Scholar] [CrossRef]
- Gatto, A. Application of a Pendulum Support Test Rig for Aircraft Stability Derivative Estimation. J. Aircr. 2009, 46, 927–934. [Google Scholar] [CrossRef]
- Raju Kulkarni, A.; La Rocca, G.; Veldhuis, L.L.M.; Eitelberg, G. Sub-scale flight test model design: Developments, challenges and opportunities. Prog. Aerosp. Sci. 2022, 130, 100798. [Google Scholar] [CrossRef]
- Carnduff, S.; Erbsloeh, S.; Cooke, A.; Cook, M. Development of a Low Cost Dynamic Wind Tunnel Facility Utilizing MEMS Inertial Sensors. In Proceedings of the 46th AIAA Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 7–10 January 2008; p. 196. [Google Scholar] [CrossRef]
- Carnduff, S.D.; Erbsloeh, S.D.; Cooke, A.K.; Cook, M.V. Characterizing Stability and Control of Subscale Aircraft from Wind-Tunnel Dynamic Motion. J. Aircr. 2009, 46, 137–147. [Google Scholar] [CrossRef]
- Gatto, A.; Lowenberg, M.H. Evaluation of a three-degree-of-freedom test rig for stability derivative estimation. J. Aircr. 2006, 43, 1747–1762. [Google Scholar] [CrossRef]
- Morelli, E.A.; Klein, V. Aircraft System Identification: Theory and Practice; AIAA Education Series; AIAA: Reston, VA, USA, 2006; Chapter 3. [Google Scholar]
- Wang, L.; Zhao, R.; Zhang, Y. Aircraft Lateral-Directional Aerodynamic Parameter Identification and Solution Method Using Segmented Adaptation of Identification Model and Flight Test Data. Aerospace 2022, 9, 433. [Google Scholar] [CrossRef]
- Paris, A.C.; Alaverdi, O. Nonlinear Aerodynamic Model Extraction from Flight-Test Data for the S-3B Viking. J. Aircr. 2005, 42, 26–32. [Google Scholar] [CrossRef]
- Morelli, E.A. Flight-Test Experiment Design for Characterizing Stability and Control of Hypersonic Vehicles. J. Guid. Control Dyn. 2009, 32, 949–959. [Google Scholar] [CrossRef]
- Van der Linden, C.; Sridhar, J.; Mulder, J. Multi-Input Design for Aerodynamic Parameter Estimation. In Proceedings of the 1995 American Control Conference-ACC’95, Seattle, WA, USA, 21–23 June 1995; pp. 703–707. [Google Scholar] [CrossRef]
- Panagiotou, P.; Fotiadis-Karras, S.; Yakinthos, K. Conceptual design of a blended wing body MALE UAV. Aerosp. Sci. Technol. 2018, 73, 32–47. [Google Scholar] [CrossRef]
- Wang, L.; Zhang, N.; Liu, H.; Yue, T. Stability characteristics and airworthiness requirements of blended wing body aircraft with podded engines. Chin. J. Aeronaut. 2022, 35, 77–86. [Google Scholar] [CrossRef]
- Cook, M.V. Flight Dynamics Principles: A Linear Systems Approach to Aircraft Stability and Control, 3rd ed.; Butterworth-Heinemann: Burlington, NJ, USA, 2007; pp. 66–96. [Google Scholar]
- Etkin, B.; Reid, L.D. Dynamics of Flight: Stability and Control, 2nd ed.; Wiley: New York, NY, USA, 1959; pp. 93–127. [Google Scholar]
- Morelli, E.A. Real-time aerodynamic parameter estimation without air flow angle measurements. J. Aircr. 2012, 49, 1064–1074. [Google Scholar] [CrossRef]
- Pamadi, B.N. Performance, Stability, Dynamics, and Control of Airplanes, 2nd ed.; AIAA: Reston, VA, USA, 2004; pp. 599–626. [Google Scholar] [CrossRef]
- Jategaonkar, R.V. Flight Vehicle System Identification: A Time-Domain Methodology, 2nd ed.; AIAA: Reston, VA, USA, 2015; pp. 30–68. [Google Scholar] [CrossRef]
- Ljung, L. Consistency of the least-squares identification method. IEEE Trans. Autom. Control 1976, 21, 779–781. [Google Scholar] [CrossRef]
- Saderla, S.; Kim, Y.; Ghosh, A.K. Online system identification of mini cropped delta UAVs using flight test methods. Aerosp. Sci. Technol. 2018, 80, 337–353. [Google Scholar] [CrossRef]
- Tai, S.; Wang, L.; Yue, T.; Liu, H. Test Data Processing of Fly-by-Wire Civil Aircraft in Low-Speed Wind Tunnel Virtual Flight. In Proceedings of the 2021 12th International Conference on Mechanical and Aerospace Engineering (ICMAE), Athens, Greece, 16–19 July 2021; pp. 96–101. [Google Scholar] [CrossRef]
- Wang, L.; Zuo, X.; Liu, H.; Yue, T.; Jia, X.; You, J. Flying qualities evaluation criteria design for scaled-model aircraft based on similarity theory. Aerosp. Sci. Technol. 2019, 90, 209–221. [Google Scholar] [CrossRef]
- Lu, S.; Wang, J.; Wang, Y. Research on Similarity Criteria of Virtual Flight Test in Low-Speed Wind Tunnel. In Proceedings of the 2021 IEEE International Conference on Power, Intelligent Computing and Systems (ICPICS), Shenyang, China, 29–31 July 2021; pp. 121–126. [Google Scholar] [CrossRef]
- Lyu, P.; Bao, S.; Lai, J.; Liu, S.; Chen, Z. A dynamic model parameter identification method for quadrotors using flight data. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2018, 233, 1990–2002. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Description | Instruments |
|---|---|---|
| ϕ, θ, ψ | Roll angle, pitch angle, yaw angle | Inertial measurement unit |
| p, q, r | Roll rate, pitch rate, yaw rate | Inertial measurement unit |
| α, β | Angle of attack and sideslip | Numerical solution |
| δa, δr | Aileron, rudder deflection | Rotary encoder |
| Fx, Fy, Fz | Force of support device in the x-, y-, and z-axis directions (body coordinate system) | Strain gauge balance |
| Side Force Derivatives | Yawing Moment Derivatives | Rolling Moment Derivatives |
|---|---|---|
| β = = | = b | = b |
| p = = | = b | = b |
| r = = | = b | = b |
| δa = = | = b | = b |
| δr = = | = b | = b |
| I = , i = , i∈(β, p, r, δa, δr) | ||
| Parameters | Proportions | Full-Size Aircraft | Test Model |
|---|---|---|---|
| Wing span b (m) | 1/9 | 36 | 4.00 |
| Mean aerodynamic chord c (m) | 1/9 | 10.41 | 1.16 |
| Wing area S (m2) | (1/9)2 | 241 | 2.98 |
| Mass m (kg) | (1/9)3 | 49,149 | 67.42 |
| Pitch moment of inertia Iy (kg·m2) | (1/9)5 | 4,044,856 | 68.50 |
| Yaw moment of inertia Iz (kg·m2) | (1/9)5 | 5,166,787 | 87.50 |
| Roll moment of inertia Ix (kg·m2) | (1/9)5 | 1,210,504 | 20.50 |
| Product of inertia Ixz (kg·m2) | (1/9)5 | 171,242 | 2.90 |
| Parameters | Traditional Wind Tunnel Measurements | Deviation (%) | Standard Deviation | ||
|---|---|---|---|---|---|
| Side force derivatives | Cyβ | −0.400 | −0.391 | −2.25 | 2.60 |
| Cyδr | 0.121 | 0.111 | −8.26 | 6.55 | |
| Cyr | 0.719 | 0.689 | −4.17 | 5.89 | |
| Rolling moment derivatives | Clβ | −0.083 | −0.090 | 8.43 | 3.55 |
| Clp | −0.085 | −0.080 | −5.88 | 4.36 | |
| Clr | 0.229 | 0.237 | 3.49 | 1.59 | |
| Clδa | −0.031 | −0.029 | −6.45 | 6.47 | |
| Clδr | 0.020 | 0.021 | 5.00 | 7.23 | |
| Yawing moment derivatives | Cnβ | 0.073 | 0.070 | −4.11 | 1.23 |
| Cnp | −0.0102 | −0.010 | −1.96 | 8.25 | |
| Cnr | −0.066 | −0.063 | −4.55 | 4.05 | |
| Cnδr | −0.062 | −0.060 | −3.23 | 3.55 | |
| GOF | p | r | β | ϕ |
|---|---|---|---|---|
| Identification model and wind tunnel virtual flight test | 0.98 | 0.99 | 0.97 | 0.98 |
| GOF | p | r | β | ϕ |
|---|---|---|---|---|
| Flight dynamics model before correction | 0.84 | 0.82 | 0.77 | 0.83 |
| Flight dynamics model after correction | 0.97 | 0.99 | 0.98 | 0.97 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tai, S.; Wang, L.; Wang, Y.; Lu, S.; Bu, C.; Yue, T. Identification of Lateral-Directional Aerodynamic Parameters for Aircraft Based on a Wind Tunnel Virtual Flight Test. Aerospace 2023, 10, 350. https://doi.org/10.3390/aerospace10040350
Tai S, Wang L, Wang Y, Lu S, Bu C, Yue T. Identification of Lateral-Directional Aerodynamic Parameters for Aircraft Based on a Wind Tunnel Virtual Flight Test. Aerospace. 2023; 10(4):350. https://doi.org/10.3390/aerospace10040350
Chicago/Turabian StyleTai, Shang, Lixin Wang, Yanling Wang, Shiguang Lu, Chen Bu, and Ting Yue. 2023. "Identification of Lateral-Directional Aerodynamic Parameters for Aircraft Based on a Wind Tunnel Virtual Flight Test" Aerospace 10, no. 4: 350. https://doi.org/10.3390/aerospace10040350
APA StyleTai, S., Wang, L., Wang, Y., Lu, S., Bu, C., & Yue, T. (2023). Identification of Lateral-Directional Aerodynamic Parameters for Aircraft Based on a Wind Tunnel Virtual Flight Test. Aerospace, 10(4), 350. https://doi.org/10.3390/aerospace10040350