


Fast Sizing Methodology and Assessment of Energy Storage Configuration on the Flight Time of a Multirotor Aerial Vehicle †


Abstract
1. Introduction
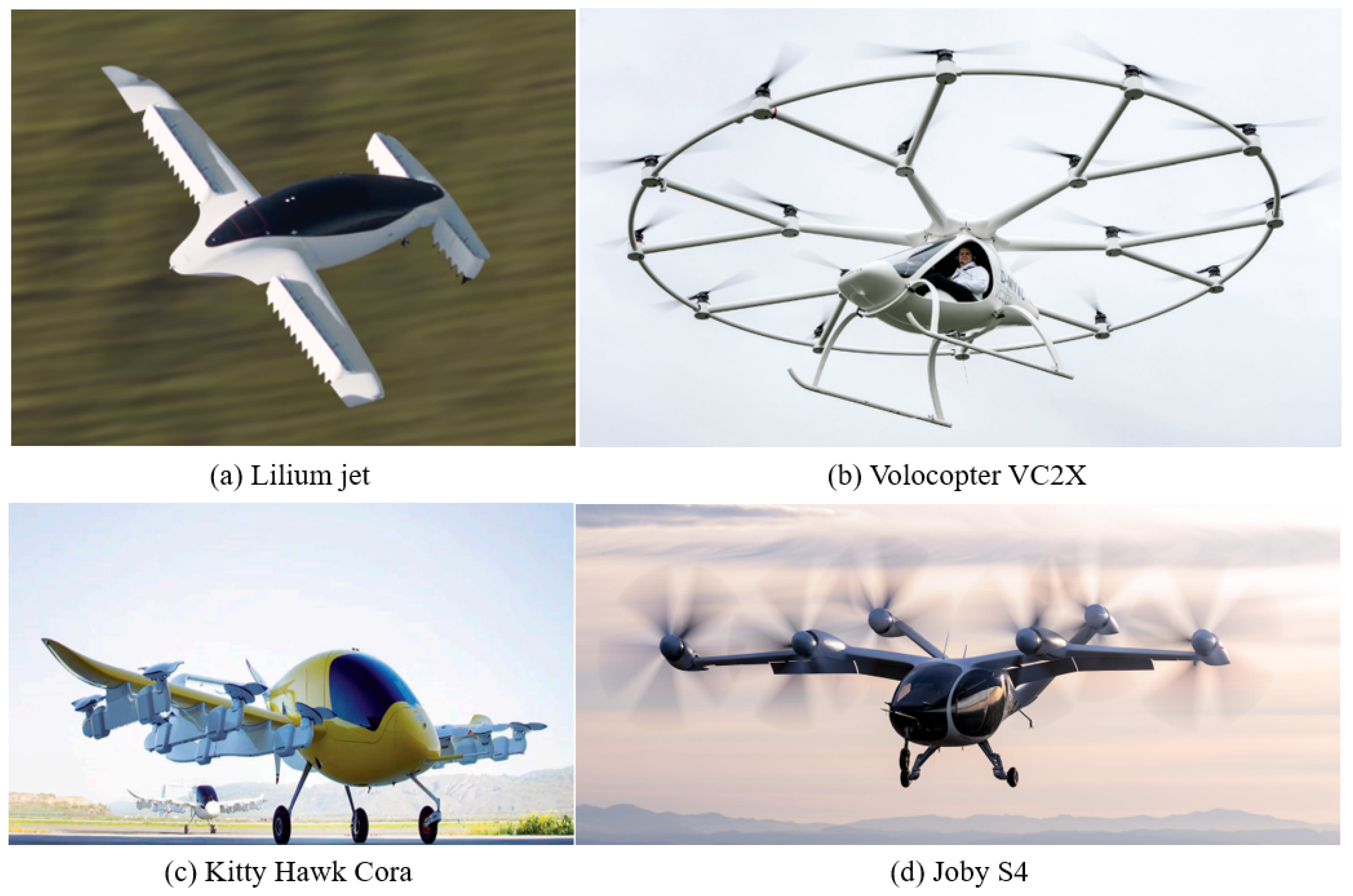
- Vectored thrust: These are powered lift eVTOL aircraft that utilize all of their lift/thrust units for both vertical lift and cruise. This is achieved by rotating (vectoring) the resultant thrust points against the direction of motion. The thrust vectoring can be accomplished in several ways: by rotating the entire wing-propulsion assembly (tilt wing), by rotating the lift/thrust unit itself (tilt fan for ducted fans and tilt prop for propellers), or by rotating the entire aircraft frame pivoted about the fuselage (tilt body or tilt frame). An example of this configuration is the Lilium jet, shown in Figure 2a, which utilizes ducted and vectored thrust. The implementation of ducted fans in the form of distributed electric propulsion (DEP) is employed [4].
- Wingless: This configuration is relatively simple and can be very efficient during vertical take-off, landing, and hovering, due to low disc-loading. However, without wings, multicopters lack cruise efficiency, which limits their application to urban air mobility (UAM) markets only. An example of this category is given in Figure 2b, named Volocopter VC2X [5]. The latter runs on nine independent batteries, powering 18 electric motor-driven variable-speed/fixed-pitch propellers. The redundancy ensures stability in the event of component failures.
- Lift plus cruise: These aircraft combine the capabilities of a multicopter for vertical take-off and landing with those of a standard aircraft for the cruise flight. This integration enables the aircraft to achieve both efficient vertical take-off and landing as well as efficient cruise performance. To optimize the range of these concepts, the propellers required for VTOL are designed with fewer blades and shorter chords to minimize drag during the cruise flight. However, the small size of the propellers used for VTOL operations presents a notable challenge in terms of noise emissions, mainly due to increased blade tip speeds. Figure 2c provides an example of this configuration, named Kitty Hawk Cora [11].
- Tilt rotor: This configuration involves either the wing and propellers or the propellers alone (tilting). This enables the propeller axis to rotate by 90 degrees as the aircraft transitions from hover to forward flight. This architecture generally allows for the design of a more optimized propeller compared to a lift and cruise aircraft configuration. However, it comes with the trade-off of higher technical complexity and larger overall size and weight due to the inclusion of tilt and variable pitch mechanisms. Joby S4 is an example of this category; it is developed by Joby Aviation (Figure 2d) and is supposed to be commercialized by 2024 [12,13].
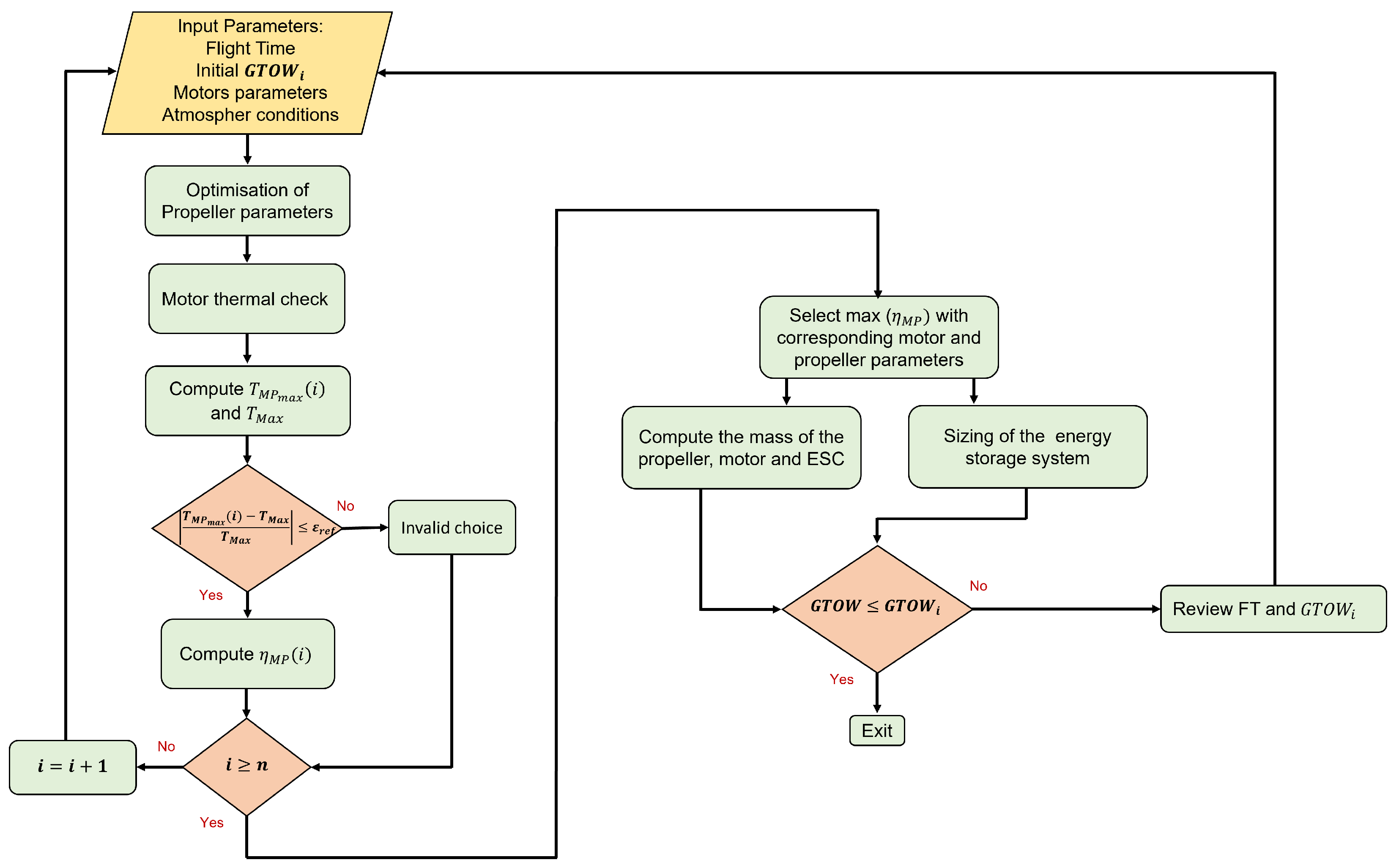
2. Sizing Methodology
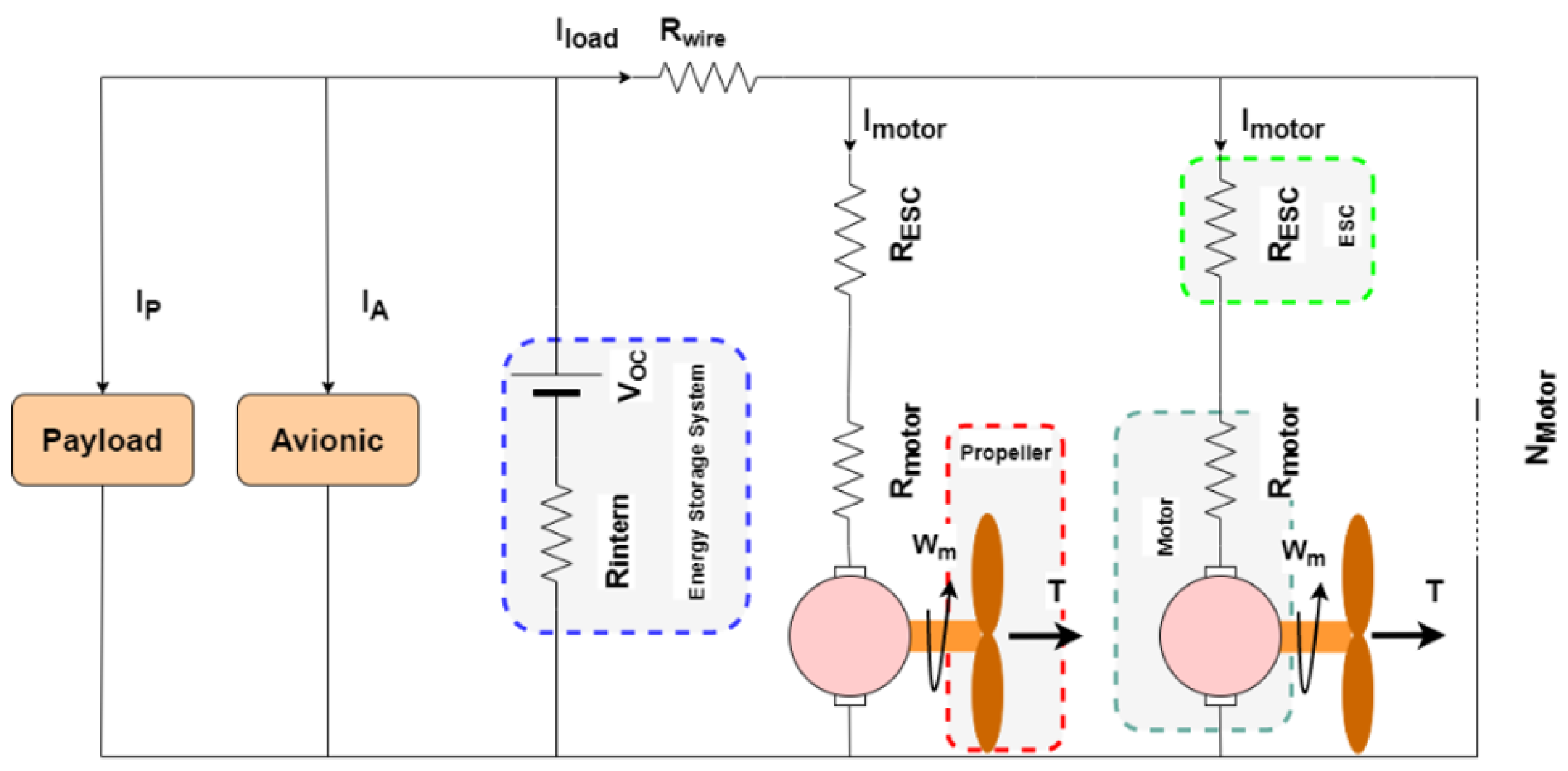
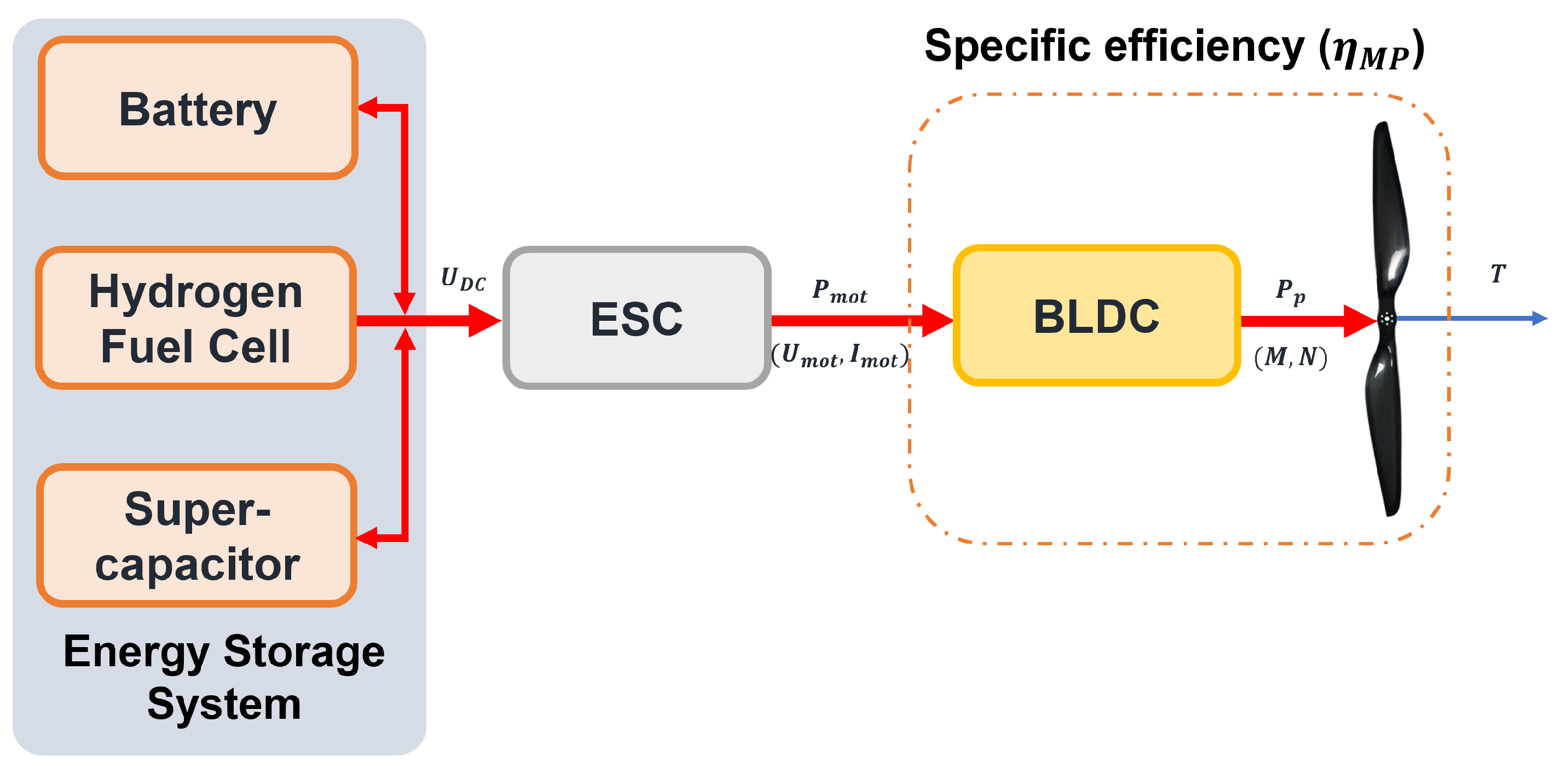
3. Propulsion Chain Modeling
3.1. Propeller
3.2. Electric Motor
3.3. Electronic Speed Controller
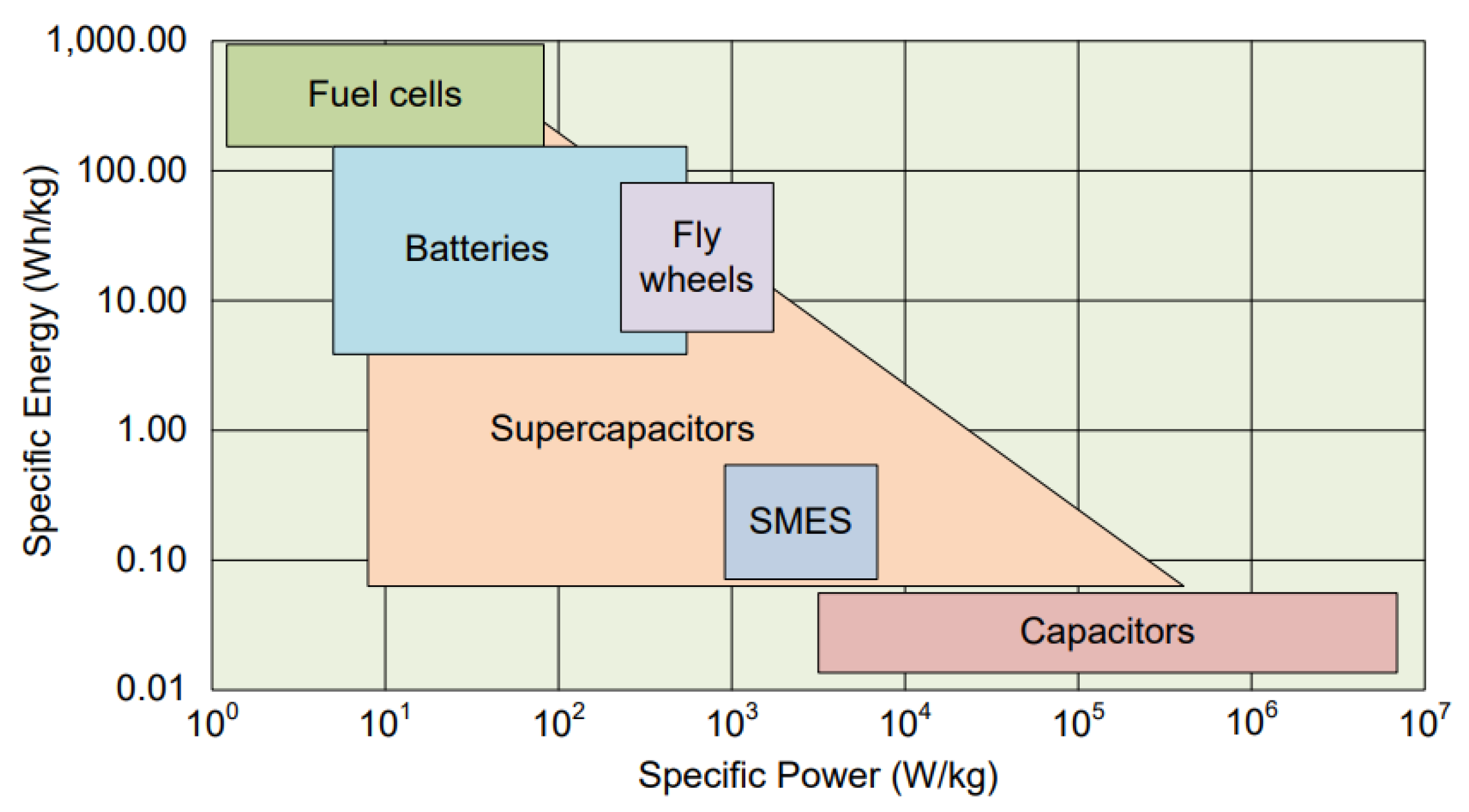
3.4. Energy Storage System
3.4.1. Battery
3.4.2. Hydrogen Fuel Cell
3.4.3. Supercapacitor
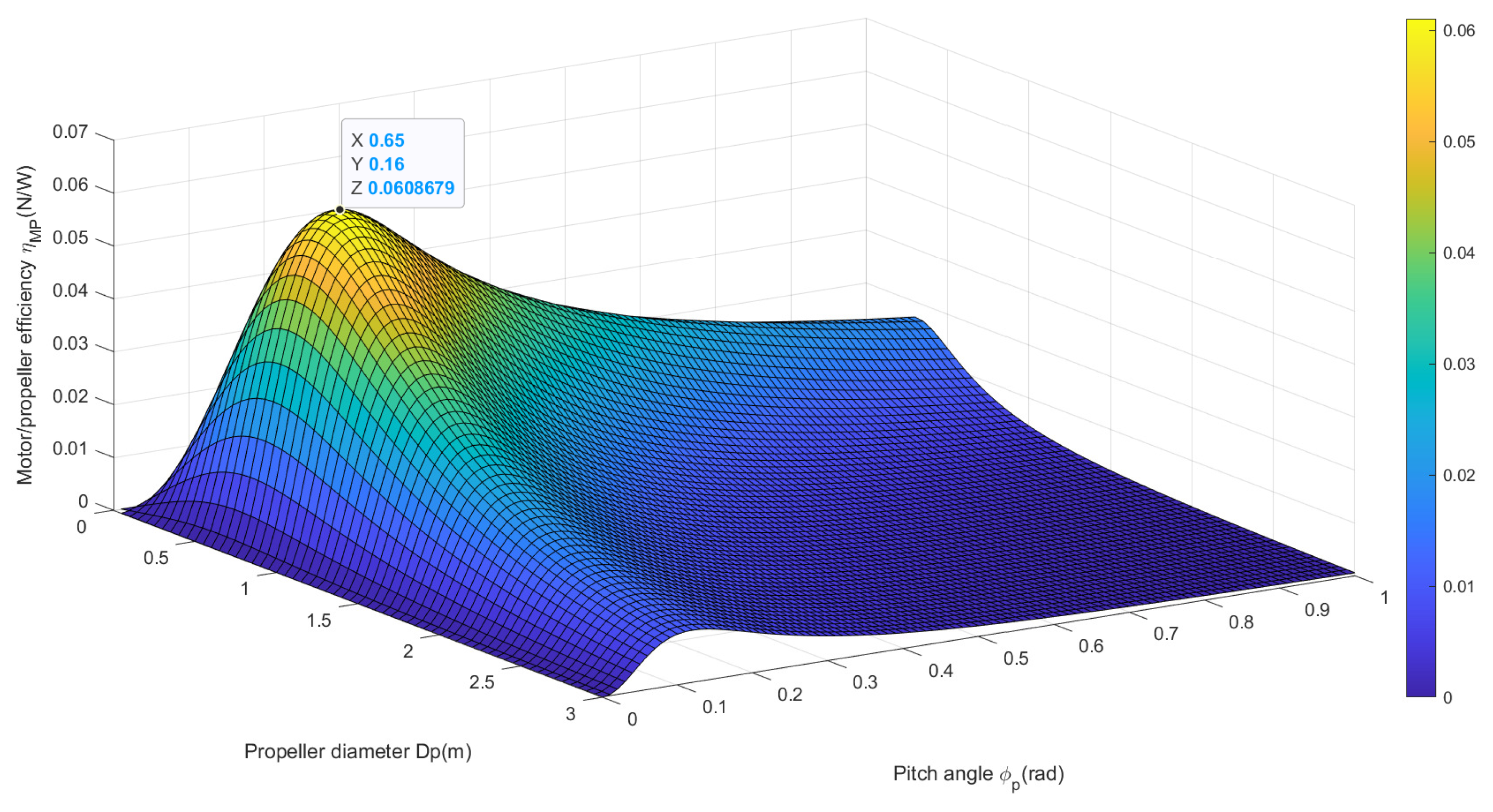
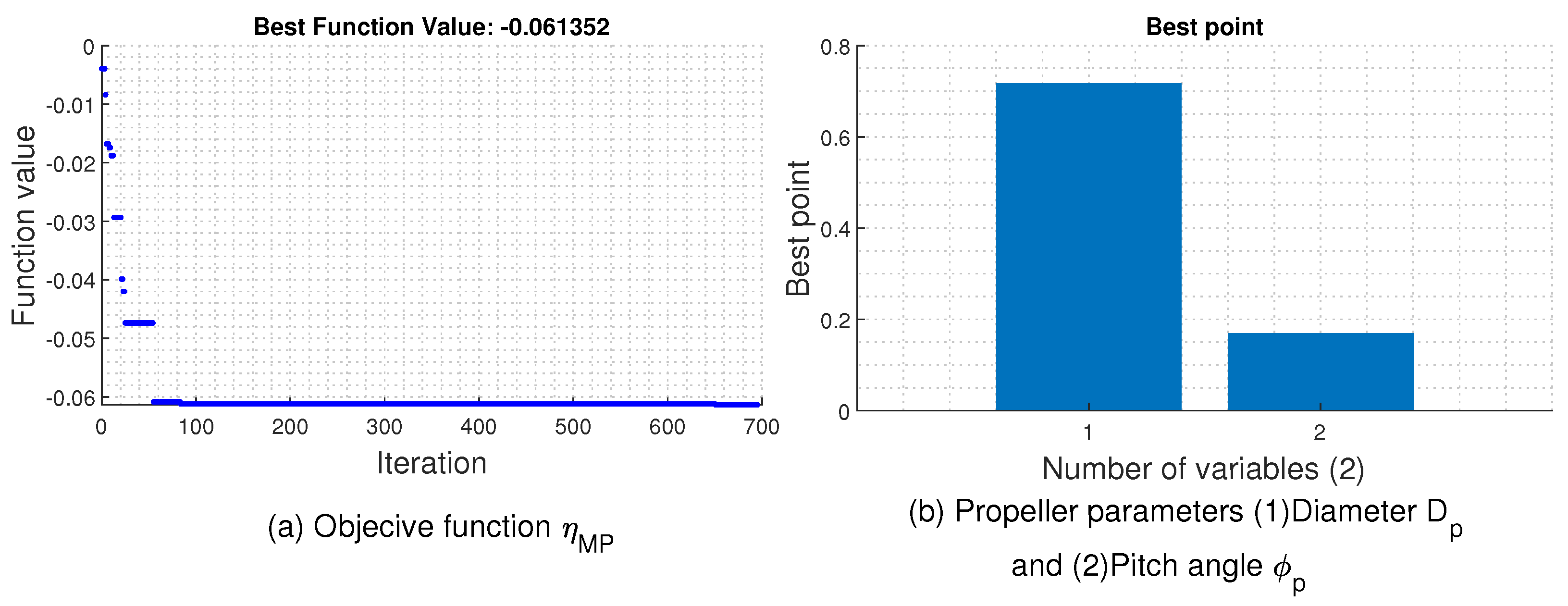
4. Motor/Propeller Optimization Problem
5. Case Study
5.1. Use Case Multirotor Drone
5.2. Pair Motor/Propeller Optimization
6. Energy Storage Sizing and Flight Time Comparison
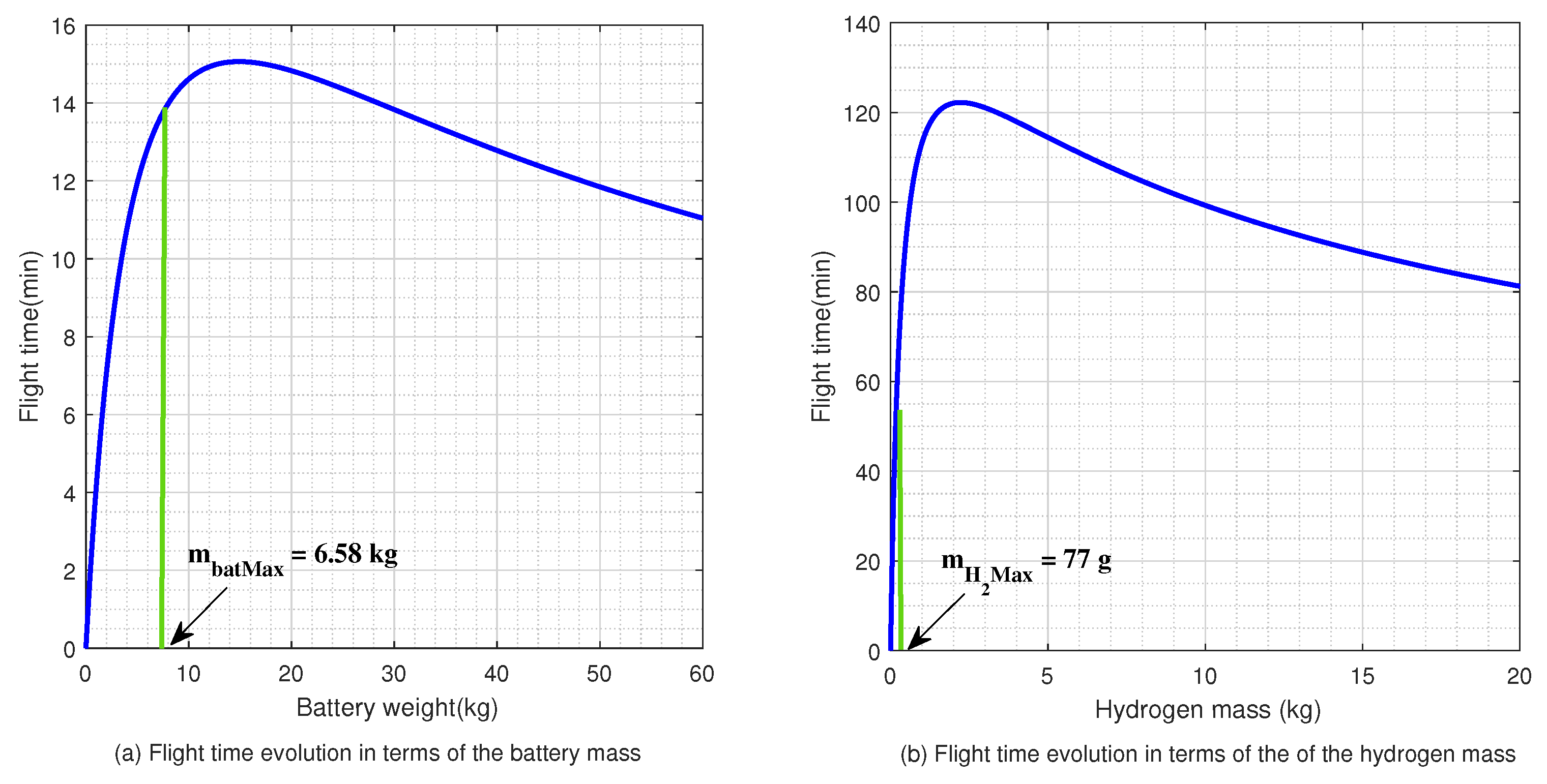
6.1. Sizing of the Battery and the Hydrogen Fuel Cell
6.1.1. Battery Sizing
6.1.2. HFC Sizing
6.2. Sizing of the Energy Storage System in the Hybrid Cases
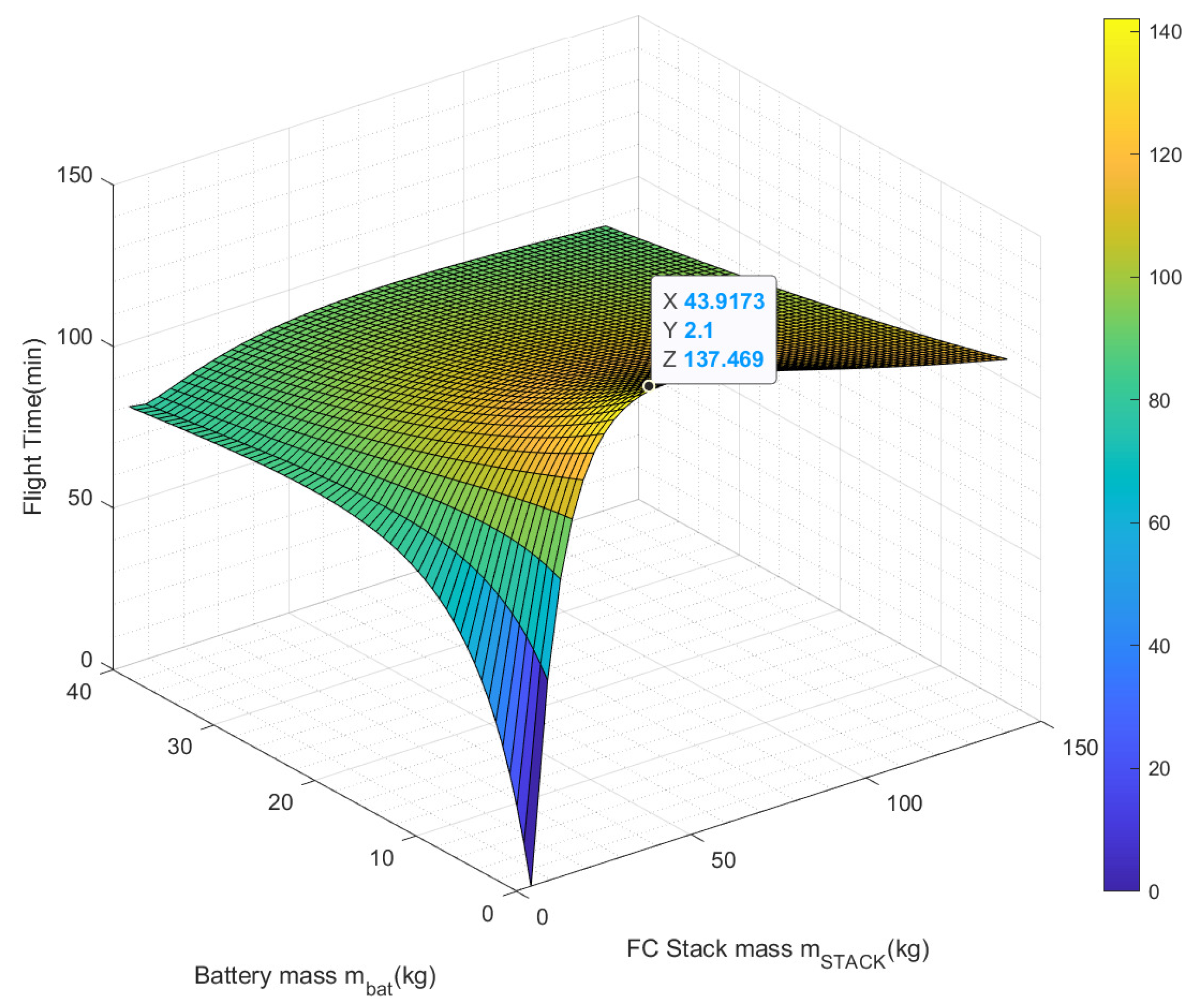
6.2.1. Bat/HFC Sizing
6.2.2. Bat/SC Sizing
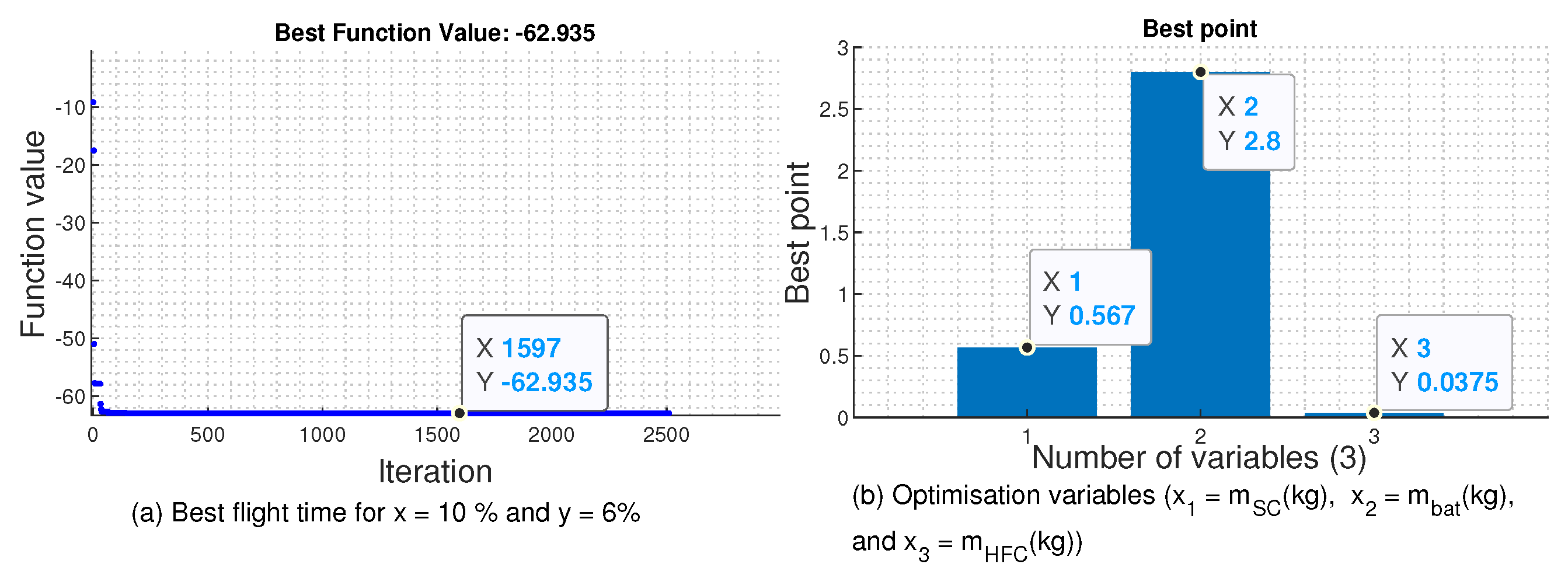
6.2.3. Bat/HFC/SC Sizing
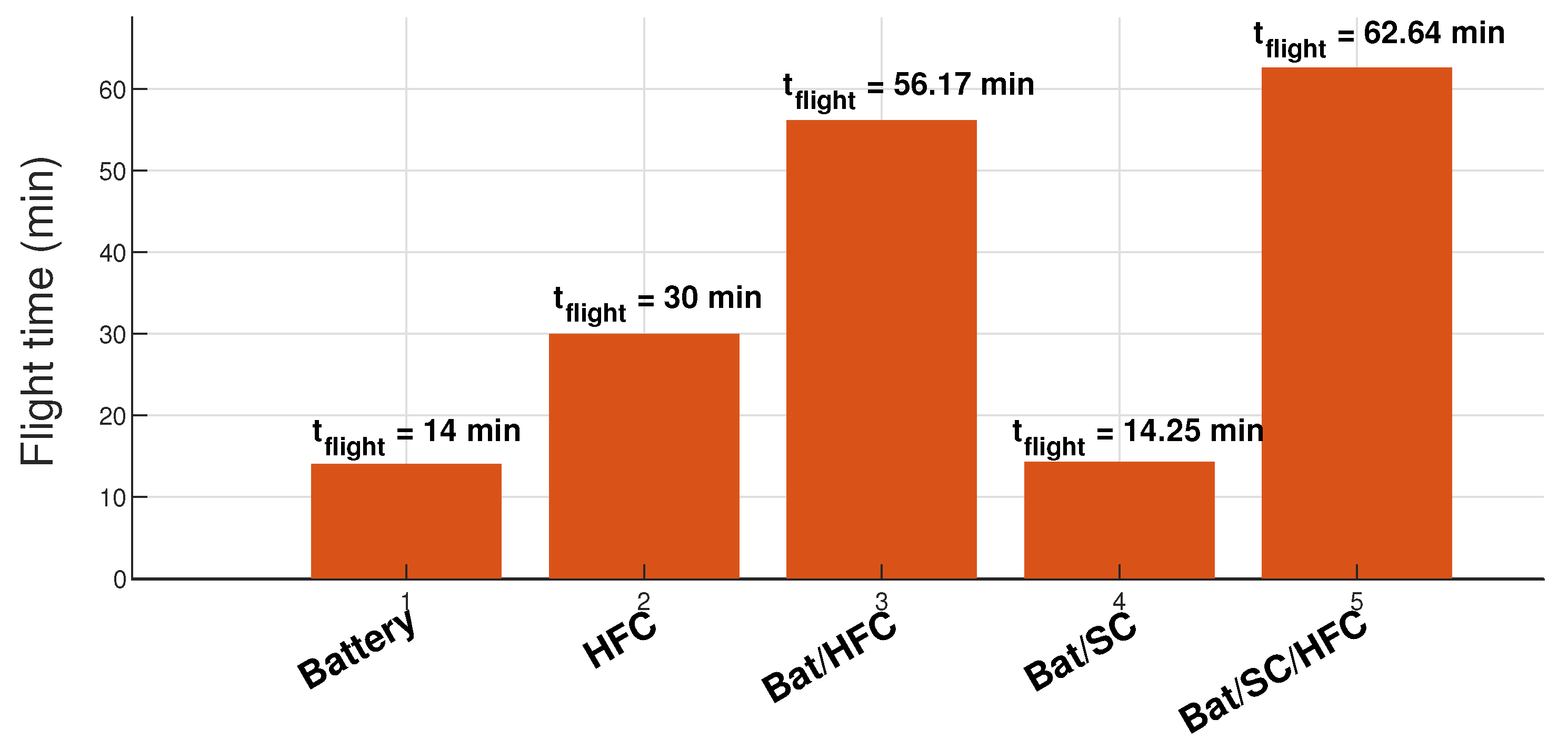
6.2.4. Flight Time Comparison
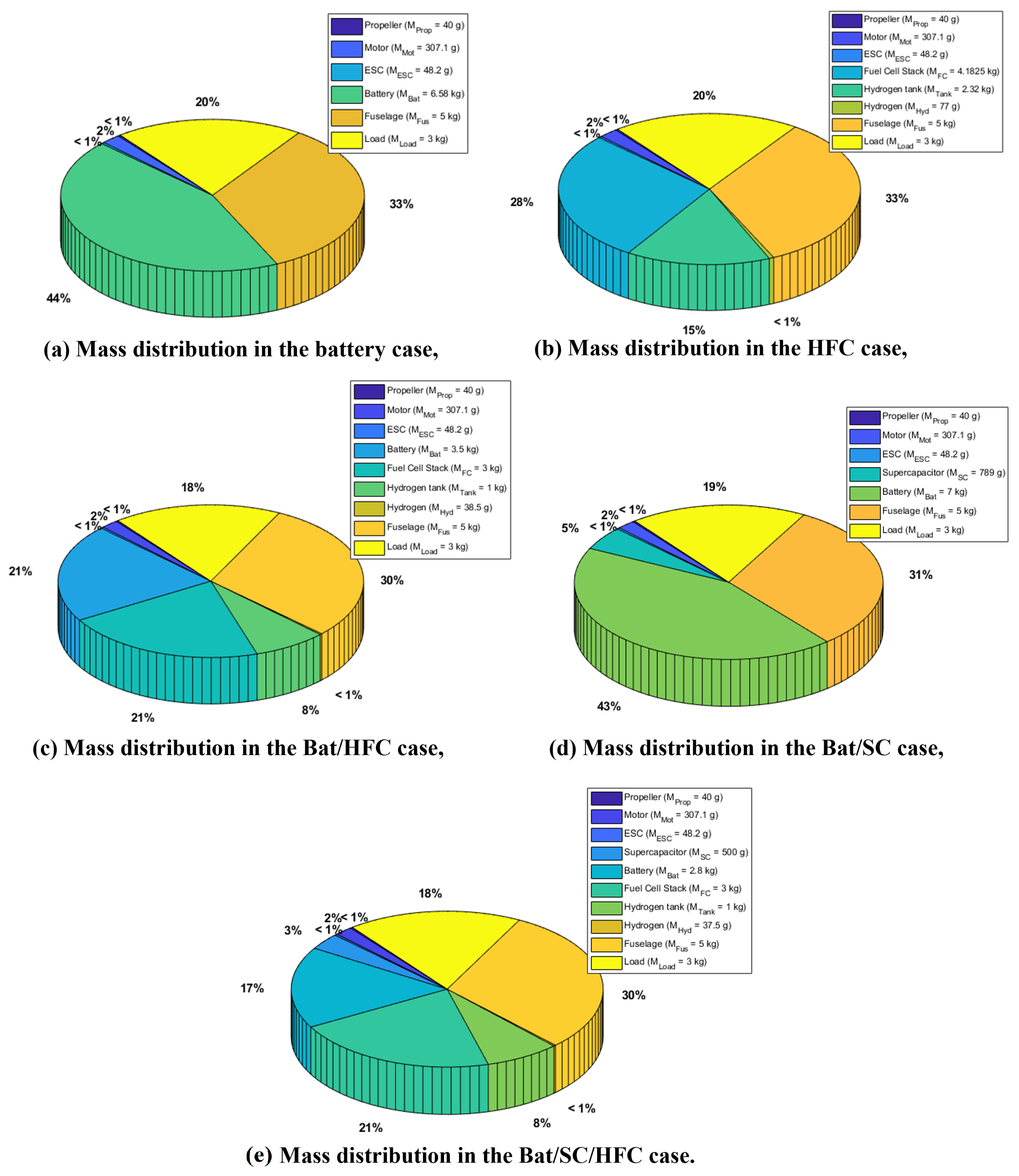
6.2.5. Multirotor Aerial Vehicle Estimation
- Battery mass: The optimal battery mass is directly defined by the sizing methodology.
- SC mass: The minimum number of series cells required to achieve an output voltage of 22.2 V for the supercapacitor is 9. This corresponds to a minimum mass of 567 g. In the hybrid configurations (Bat/SC or Bat/SC/HFC), the mass of the supercapacitor is determined through optimization to maximize the flight time while adhering to the GTOW constraint. It is remarkable that the SC mass in the hybrid configurations, either in Bat/SC or in Bat/SC/HFC, is realizable as the minimum mass of the SC is well respected.
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| A | 5 |
| 0.85 | |
| 0.75 | |
| 0.5 | |
| e | 0.83 |
| 0.015 | |
| 0.9 |
| Component | Parameters |
|---|---|
| Nominal voltage (V) | |
| Maximum charge/discharge current (A) | |
| Internet resistance | |
| Nominal capacity (Ah) | |
| Specific energy (Wh/kg) | |
| Mass (kg) | |
| Volume (L) |
| Component | Parameters |
|---|---|
| Propeller | |
| Motor | |
| ESC | |
| Battery | |
| Fuselage | |
| Payload |
| Component | Parameters |
|---|---|
| Battery | |
| HFC |
| Component | Parameters |
|---|---|
| Battery | |
| HFC |
| Component | Parameters |
|---|---|
| Battery | |
| SC |
| Component | Parameters |
|---|---|
| Battery | |
| SC | |
| HFC |
References
- TomTom Traffic Index. Available online: https://www.tomtom.com/en-gb/traffic-index/ranking/ (accessed on 18 April 2023).
- Airbus City Project. Available online: https://www.airbus.com/en/innovation/zero-emission/urban-air-mobility/cityairbus-nextgen (accessed on 18 April 2023).
- Boeing Passenger Air Vehicle. Available online: https://www.boeing.com/features/frontiers/2019/autonomous-flying-vehicles/index.page (accessed on 18 April 2023).
- Lilium Jet. Available online: https://lilium.com/jet (accessed on 18 April 2023).
- Volocopter UAM. Available online: https://www.volocopter.com/urban-air-mobility/ (accessed on 18 April 2023).
- Nathen, P.; Strohmayer, A.; Miller, R.; Grimshaw, S.; Taylor, J. Architectural Performance Assessment of An Electric Vertical Take-Off and Landing (eVTOL) Aircraft Based on a Ducted Vectored Thrust Concept. 2021. Available online: https://lilium.com/files/redaktion/refresh_feb2021/investors/Lilium_7-Seater_Paper.pdf (accessed on 18 April 2023).
- Doo, J.T.; Pavel, M.D.; Didey, A.; Hange, C.; Diller, N.P.; Tsairides, M.A.; Smith, M.; Bennet, E.; Bromfield, M.; Mooberry, J. NASA Electric Vertical Takeoff and Landing (eVTOL) Aircraft Technology for Public Services—A White Paper; NASA Transformative Vertical Flight Working Group 4 (TVF4); National Aeronautics and Space Administration (NASA): Washington, DC, USA, 2021. [Google Scholar]
- Osita, U.; Horri, T.; Innocente, N.; Bromfield, M.; Bromfield, M. Investigation of a Mission-based Sizing Method for Electric VTOL Aircraft Preliminary Design. In Proceedings of the AIAA SCITECH 2022 Forum 2022, San Diego, CA, USA, 3–7 January 2022. [Google Scholar] [CrossRef]
- Pradeep, P.; Wei, P. Energy-efficient arrival with rta constraint for multirotor evtol in urban air mobility. J. Aerosp. Inf. Syst. 2019, 16, 263–277. [Google Scholar] [CrossRef]
- Bacchini, A.; Cestino, E. Electric VTOL Configurations Comparison. Aerospace 2019, 6, 26. [Google Scholar] [CrossRef]
- Kitty Cora. Available online: https://www.kittyhawk.aero/history (accessed on 18 April 2023).
- Chauhan, S.; Martins, J.R.R.A. Tilt-wing evtol takeoff trajectory Optimisation. J. Aircr. 2020, 57, 93–112. [Google Scholar] [CrossRef]
- Jobby Aviation S4. Available online: https://www.jobyaviation.com/ (accessed on 18 April 2023).
- Volocopter VC2X Flight Test in Paris. Available online: https://www.volocopter.com/newsroom/volocopter-flies-at-paris-air-forum/ (accessed on 18 April 2023).
- Bershadsky, D.; Haviland, S.; Johnson, E.N. Electric Multirotor UAV Propulsion System Sizing for Performance Prediction and Design Optimisation. In Proceedings of the 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar]
- Dai, X.; Quan, Q.; Ren, J.; Cai, K.Y. An Analytical Design-Optimisation Method for Electric Propulsion Systems of Multicopter UAVs With Desired Hovering Endurance. IEEE/ASME Trans. Mechatronics 2019, 24, 228–239. [Google Scholar] [CrossRef]
- Gur, O.; Rosen, A. Optimizing electric propulsion systems for UAVs. In Proceedings of the 12th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Victoria, BC, Canada, 10–12 September 2008; p. 5916. [Google Scholar]
- Biczyski, M.; Sehab, R.; Whidborne, J.F.; Krebs, G.; Luk, P. Multirotor Sizing Methodology with Flight Time Estimation. J. Adv. Transp. 2020, 2020, 9689604. [Google Scholar] [CrossRef]
- Ampatis, C.; Papadopoulos, E. Parametric design and Optimisation of multi-rotor aerial vehicles. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; pp. 6266–6271. [Google Scholar] [CrossRef]
- T-Motor. Available online: https://store.tmotor.com/goods.php?id=384 (accessed on 18 April 2023).
- Mejzlik. Available online: https://www.mejzlik.eu/technical-data/propeller-data (accessed on 18 April 2023).
- Brandt, J.; Selig, M. Propeller Performance Data at Low Reynolds Numbers. In Proceedings of the 49th AIAA Aerospace Sciences Meeting, AIAA 2011–1255, Orlando, FL, USA, 4–7 January 2011. [Google Scholar]
- Cavcar, M. The International Standard Atmosphere (ISA); Anadolu Univ.: Eskişehir, Turkey, 2000; Volume 30. [Google Scholar]
- Vu, N.A.; Dang, D.K.; Dinh, T.L. Electric propulsion system sizing methodology for an agriculture multicopter. Aerosp. Sci. Technol. 2019, 90, 314–326. [Google Scholar] [CrossRef]
- KDEDirect. Available online: https://www.kdedirect.com/collections/uas-multi-rotor-brushless-motors (accessed on 18 April 2023).
- Harrington, A.M.; Kroninger, C. Characterization of Small DC Brushed and Brushless Motors; Aberdeen Proving Ground: Aberdeen, MD, USA, 2013. [Google Scholar]
- Aurbach, D.; Gofer, Y.; Lu, Z.; Schechter, A.; Chusid, O.; Gizbar, H.; Levi, E. A short review on the comparison between Li battery systems and rechargeable magnesium battery technology. J. Power Sources 2001, 97, 28–32. [Google Scholar] [CrossRef]
- Evangelisti, S.; Tagliaferri, C.; Brett, D.J.; Lettieri, P. Life cycle assessment of a polymer electrolyte membrane fuel cell system for passenger vehicles. J. Clean. Prod. 2017, 142, 4339–4355. [Google Scholar] [CrossRef]
- Zhang, B.; Song, Z.; Zhao, F.; Liu, C. Overview of Propulsion Systems for Unmanned Aerial Vehicles. Energies 2022, 15, 455. [Google Scholar] [CrossRef]
- Ng, W.; Datta, A. Hydrogen Fuel Cells and Batteries for Electric-Vertical Takeoff and Landing Aircraft. J. Aircr. 2019, 56, 1765–1782. [Google Scholar] [CrossRef]
- An, J.-H.; Kwon, D.-Y.; Jeon, K.-S.; Tyan, M.; Lee, J.-W. Advanced Sizing Methodology for a Multi-Mode eVTOL UAV Powered by a Hydrogen Fuel Cell and Battery. Aerospace 2022, 9, 71. [Google Scholar] [CrossRef]
- Thirkell, A.; Chen, R.; Harrington, I. A Fuel Cell System Sizing Tool Based on Current Production Aircraft; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2017. [Google Scholar] [CrossRef]
- Intelligent Energy. Available online: https://www.intelligent-energy.com/ (accessed on 18 April 2023).
- Marzougui, T.; Neuhaus, K.; Labracherie, L.; Scalabrin, G. Optimal sizing of hybrid electric propulsion system for eVTOL. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Online, 11–14 September 2022. [Google Scholar]
- Boukoberine, M.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Maxwell. Available online: https://maxwell.com/products/ (accessed on 18 April 2023).
- Eren, Y.; Küçükdemiral, İ.; Üstoğlu, İ. Chapter 2—Introduction to Optimisation, Optimisation in Renewable Energy Systems; Butterworth-Heinemann: Oxford, UK, 2017; pp. 27–74. [Google Scholar]
- Theys, B.; Dimitriadis, G.; Hendrick, P.; De Schutter, J. Influence of propeller configuration on propulsion system efficiency of multi-rotor Unmanned Aerial Vehicles. In Proceedings of the 2016 International Conference on Unmanned Aircraft Systems (ICUAS), Arlington, VA, USA, 7–10 June 2016; pp. 195–201. [Google Scholar]
- Bolam, R.C.; Vagapov, Y.; Anuchin, A. Review of Electrically Powered Propulsion for Aircraft. In Proceedings of the 2018 53rd International Universities Power Engineering Conference (UPEC), Glasgow, UK, 4–7 September 2018; pp. 1–6. [Google Scholar]
- Rufer, A. The dream of efficient energy storage–From BESS KERS & Co to the hybrid power plant. In Proceedings of the19th European Conf. on Power Electronics and Applications (EPE’17 ECCE Europe), Warsaw, Poland, 11–14 September 2017; pp. 1–9. [Google Scholar]
- Uber Elevate. Uber Elevate Mission and Vehicle Requirements. 2018. Volume 2018. Available online: https://s3.amazonaws.com/uber-static/elevate/Summary+Mission+and+Requirements.pdf (accessed on 18 April 2023).
- Brown, A.; Harris, W. A Vehicle Design and Optimisation Model for On-Demand Aviation. In Proceedings of the 2018 AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar]





















| Combination Number | Motor Specification | Propeller Parameters | Thrust Efficiency |
|---|---|---|---|
| 1 | U7-V2.0 KV420 | P18 × 6.0 | 0.0528 |
| 2 | U7-V2.0 KV490 | P20 × 6.7 | 0.0533 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chahba, S.; Sehab, R.; Morel, C.; Krebs, G.; Akrad, A. Fast Sizing Methodology and Assessment of Energy Storage Configuration on the Flight Time of a Multirotor Aerial Vehicle. Aerospace 2023, 10, 425. https://doi.org/10.3390/aerospace10050425
Chahba S, Sehab R, Morel C, Krebs G, Akrad A. Fast Sizing Methodology and Assessment of Energy Storage Configuration on the Flight Time of a Multirotor Aerial Vehicle. Aerospace. 2023; 10(5):425. https://doi.org/10.3390/aerospace10050425
Chicago/Turabian StyleChahba, Saad, Rabia Sehab, Cristina Morel, Guillaume Krebs, and Ahmad Akrad. 2023. "Fast Sizing Methodology and Assessment of Energy Storage Configuration on the Flight Time of a Multirotor Aerial Vehicle" Aerospace 10, no. 5: 425. https://doi.org/10.3390/aerospace10050425
APA StyleChahba, S., Sehab, R., Morel, C., Krebs, G., & Akrad, A. (2023). Fast Sizing Methodology and Assessment of Energy Storage Configuration on the Flight Time of a Multirotor Aerial Vehicle. Aerospace, 10(5), 425. https://doi.org/10.3390/aerospace10050425