

A Cooperative Target Localization Method Based on UAV Aerial Images


Abstract
:1. Introduction
- 1.
- The solution technique does not require the input of focal length and elevation information;
- 2.
- Simultaneous localization of multiple targets is possible;
- 3.
- The target localization error may be estimated based on the error component of each observation;
- 4.
- The proposed traceless Kalman filtering approach can significantly increase the target localization and tracking accuracy while maintaining good robustness.
2. Scenario Problem Description
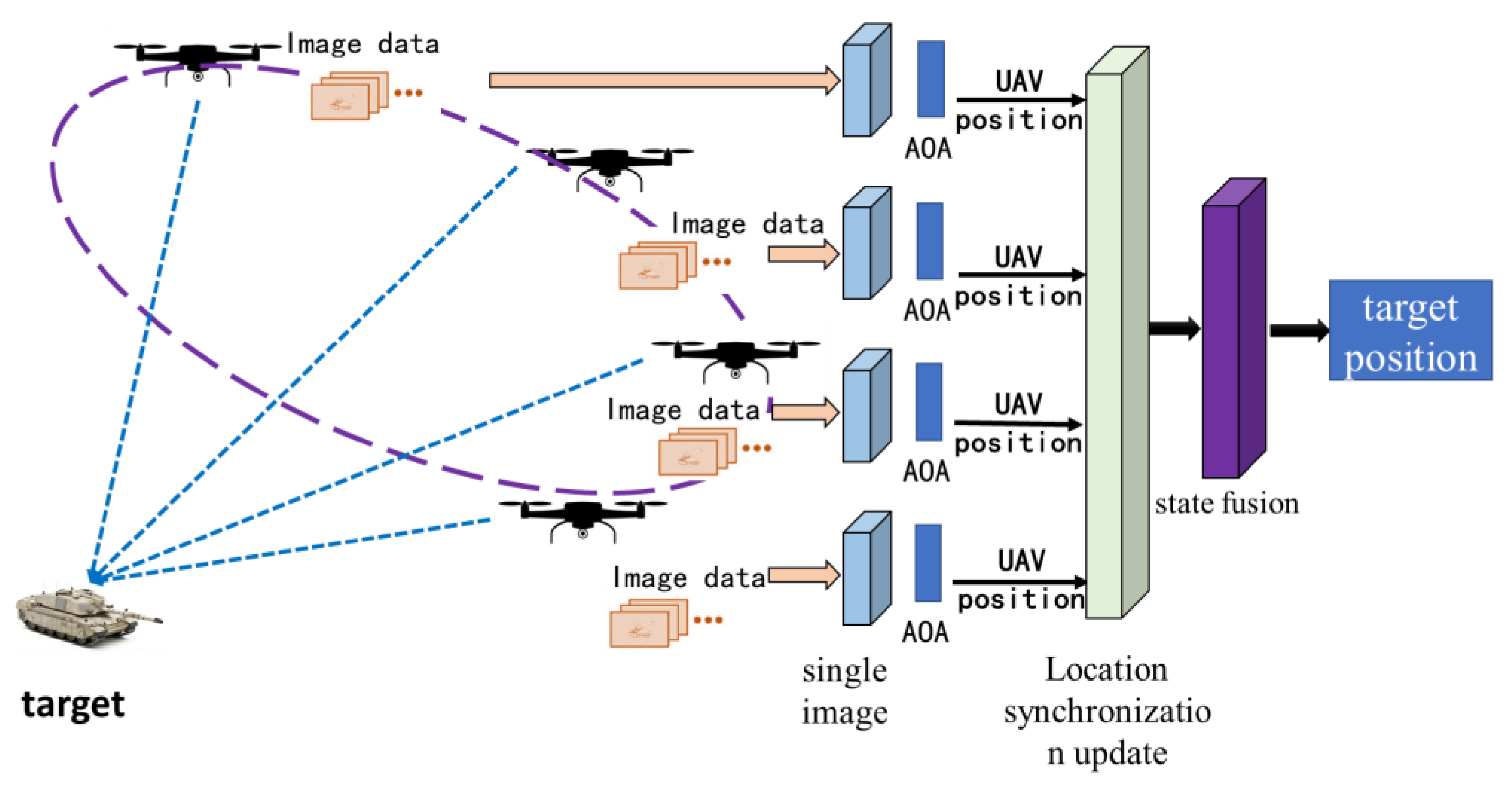
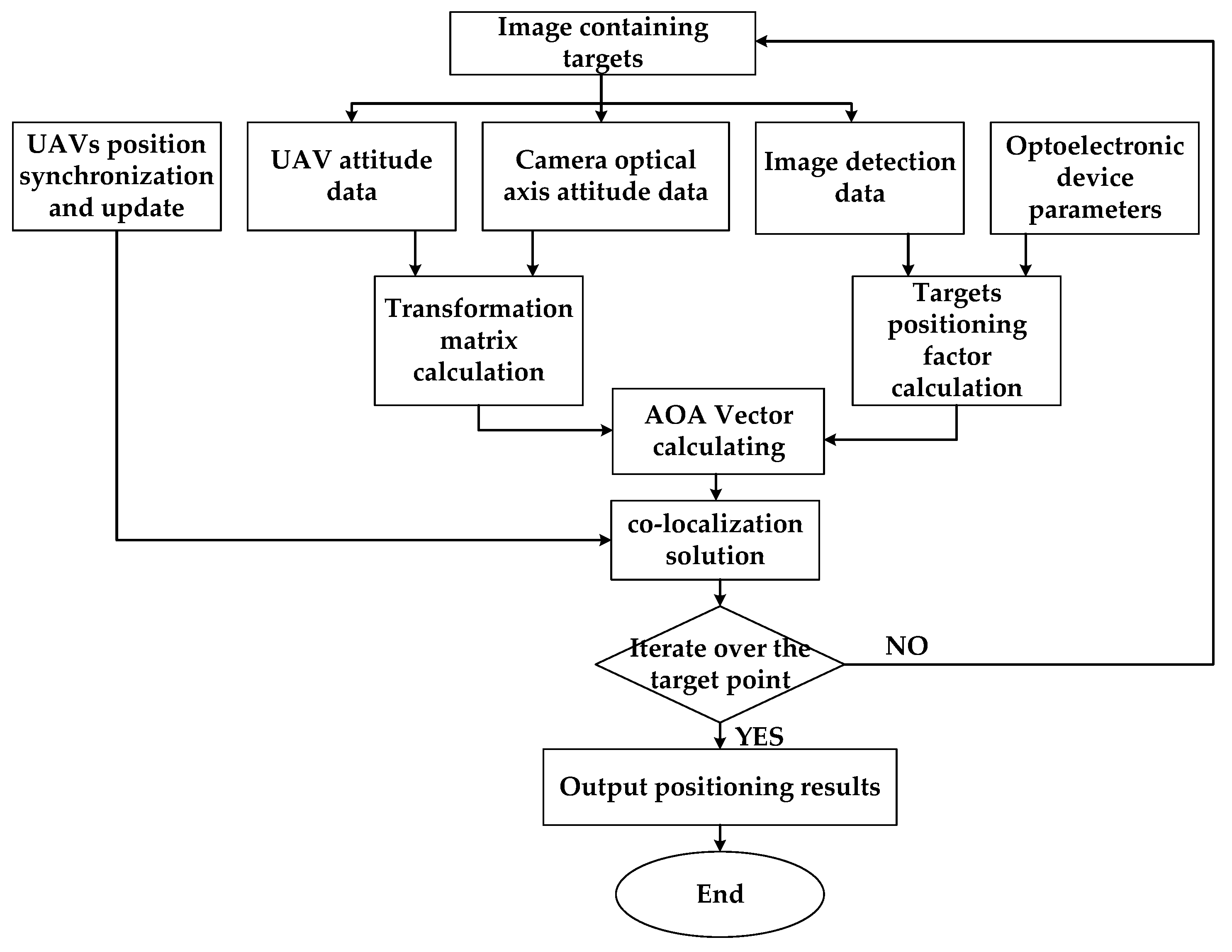
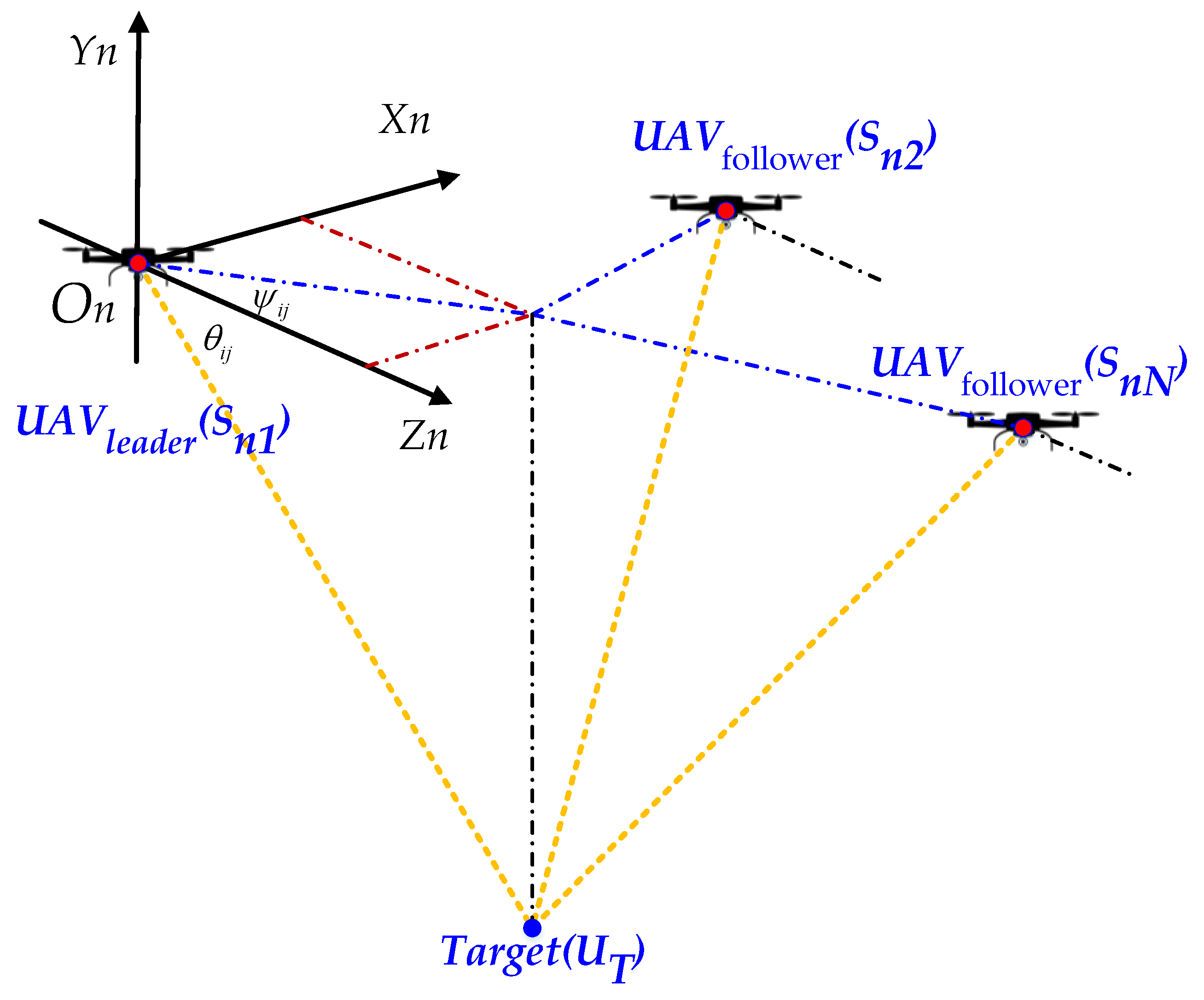
2.1. Cooperative Target Localization Process for Multiple UAVs
2.2. Model Assumptions
- (1)
- Because the UAV’s camera center corresponds with the origin of the navigation coordinate system, any position mistake between them is ignored.
- (2)
- The UAV’s own location information is updated without delay;
- (3)
- The data link has no latency, a big bandwidth, and anti-interference properties to ensure that information is properly transferred.
- (4)
- The image’s optical distortion is ignored.
3. Multi-UAV Target Co-Location Modeling
3.1. WGS-84 Earth Ellipsoid Model
3.2. Synchronization and Updating of Observational Position
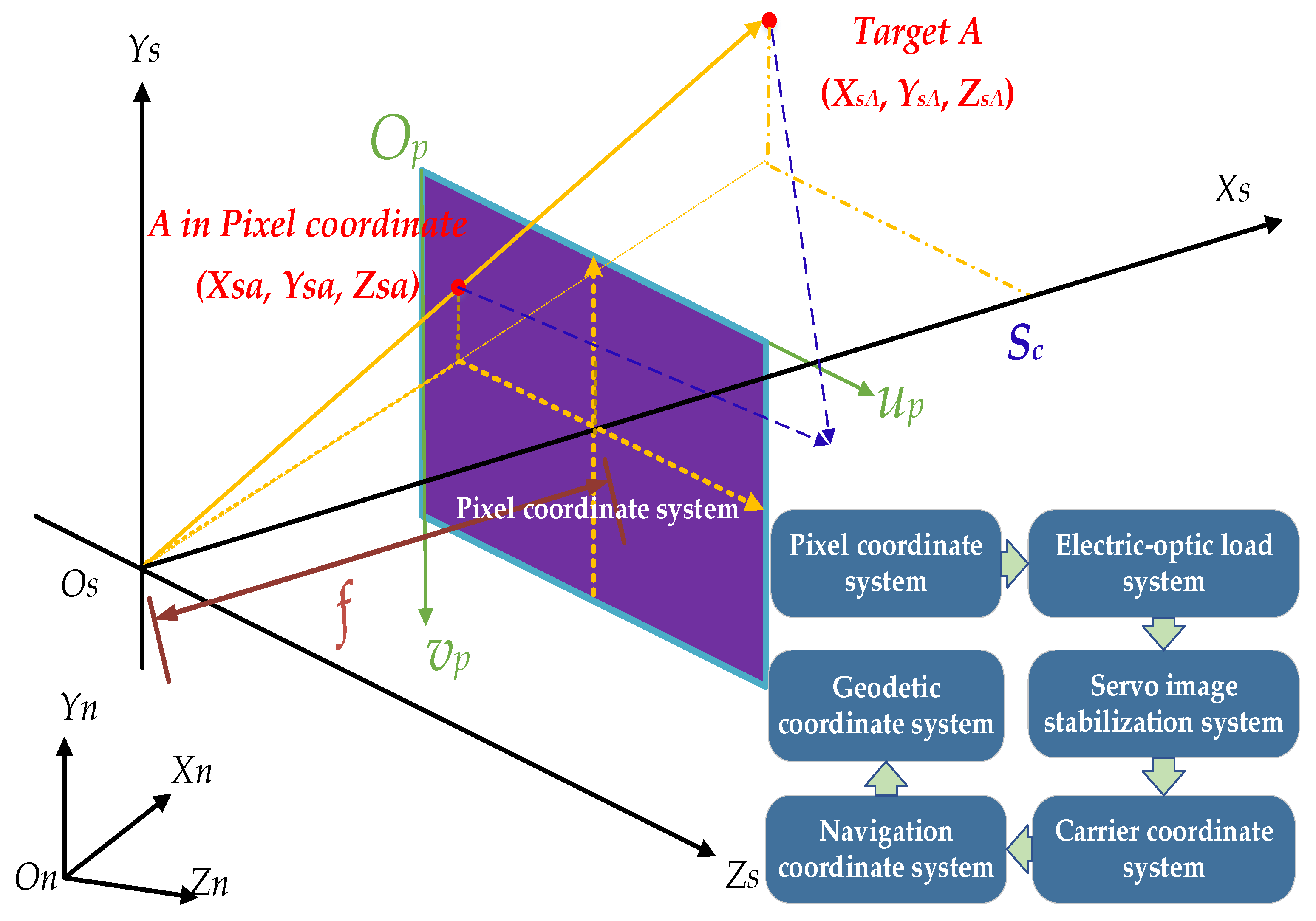
3.3. Image Based Localization Factor Solution Method
3.4. Image-Based AOA Vector Solution Process
3.5. Co-Location Solution Model
4. Collaborative Positioning Error Model
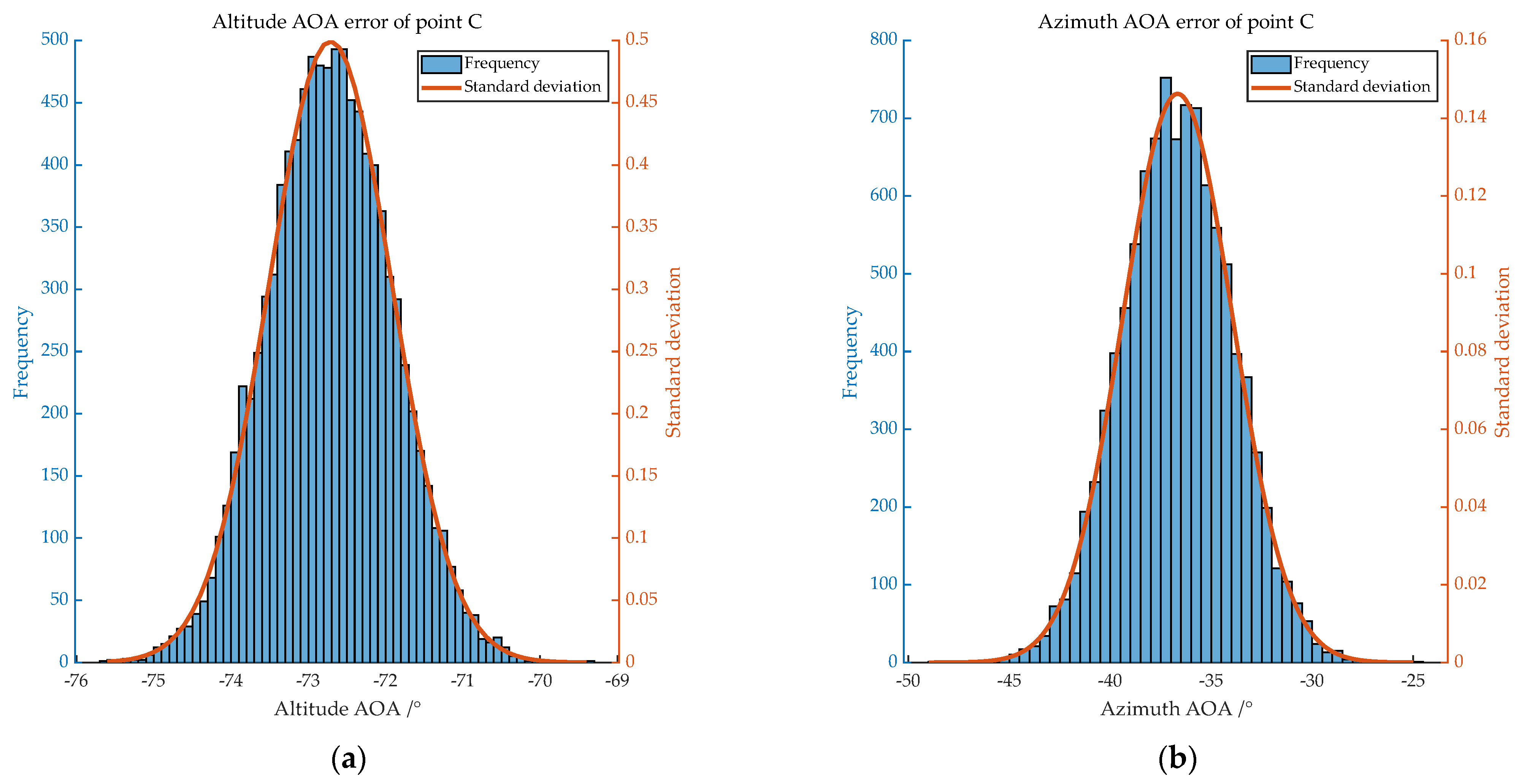
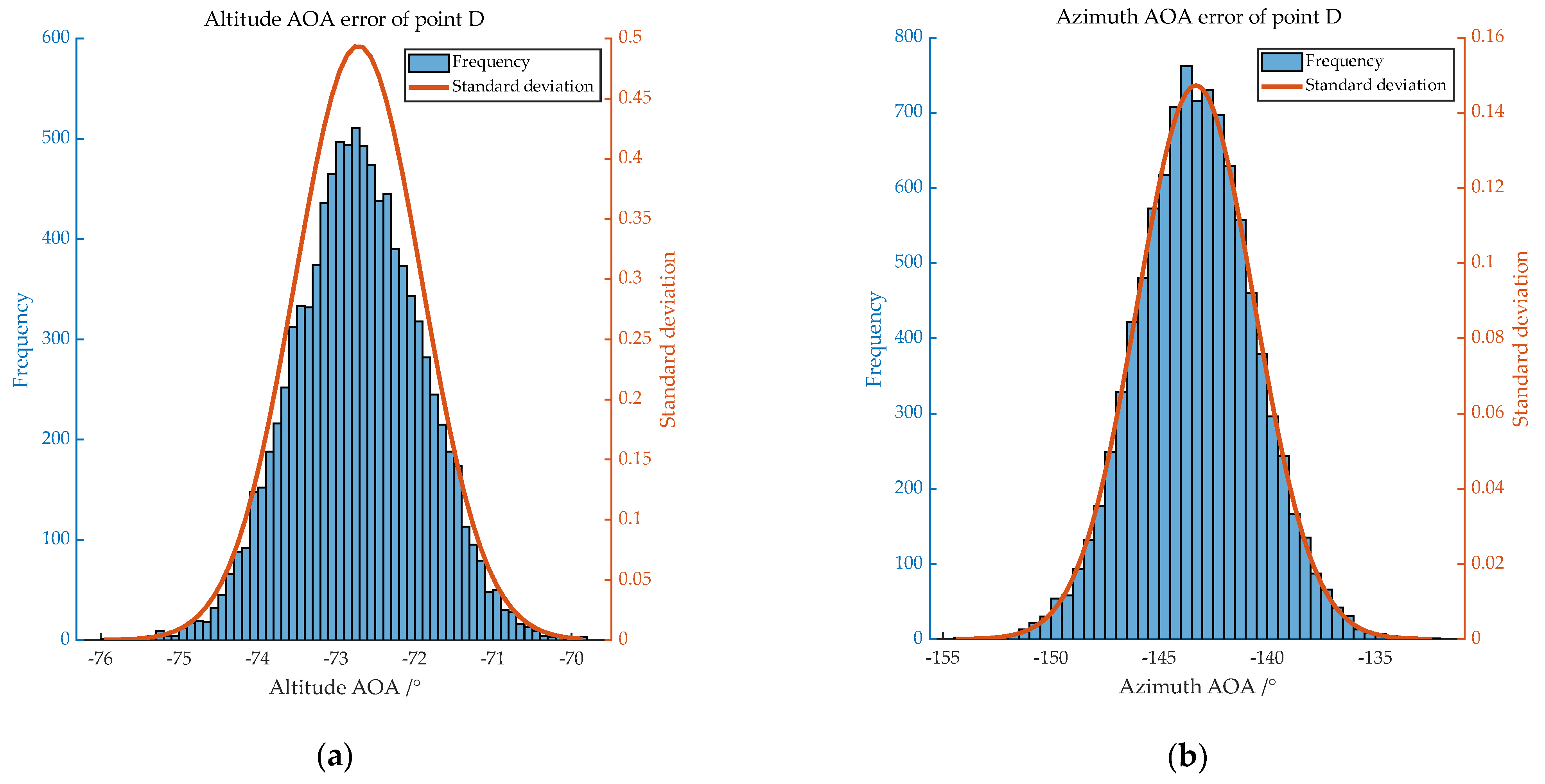
4.1. AOA Error Model Based on Image
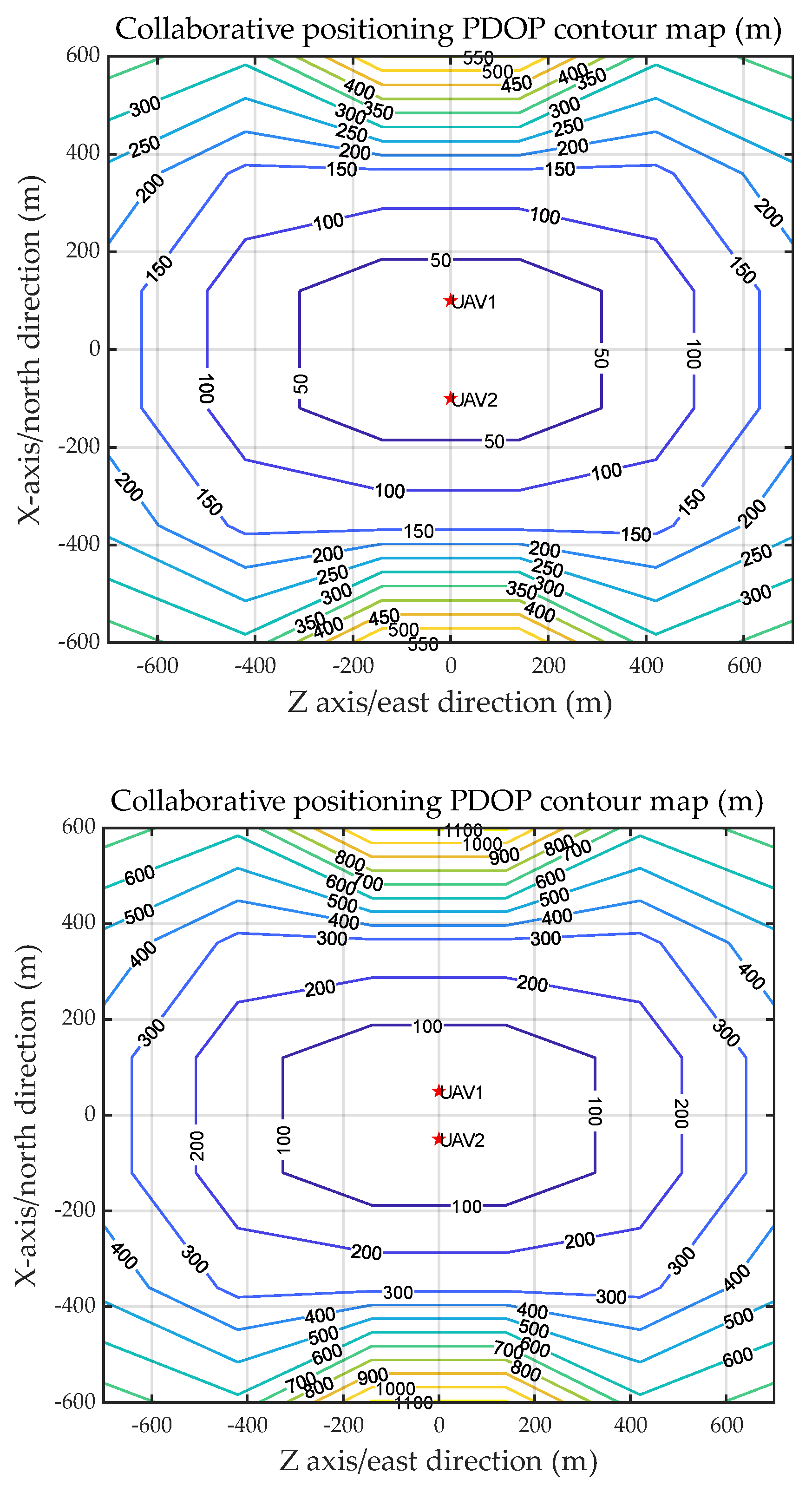
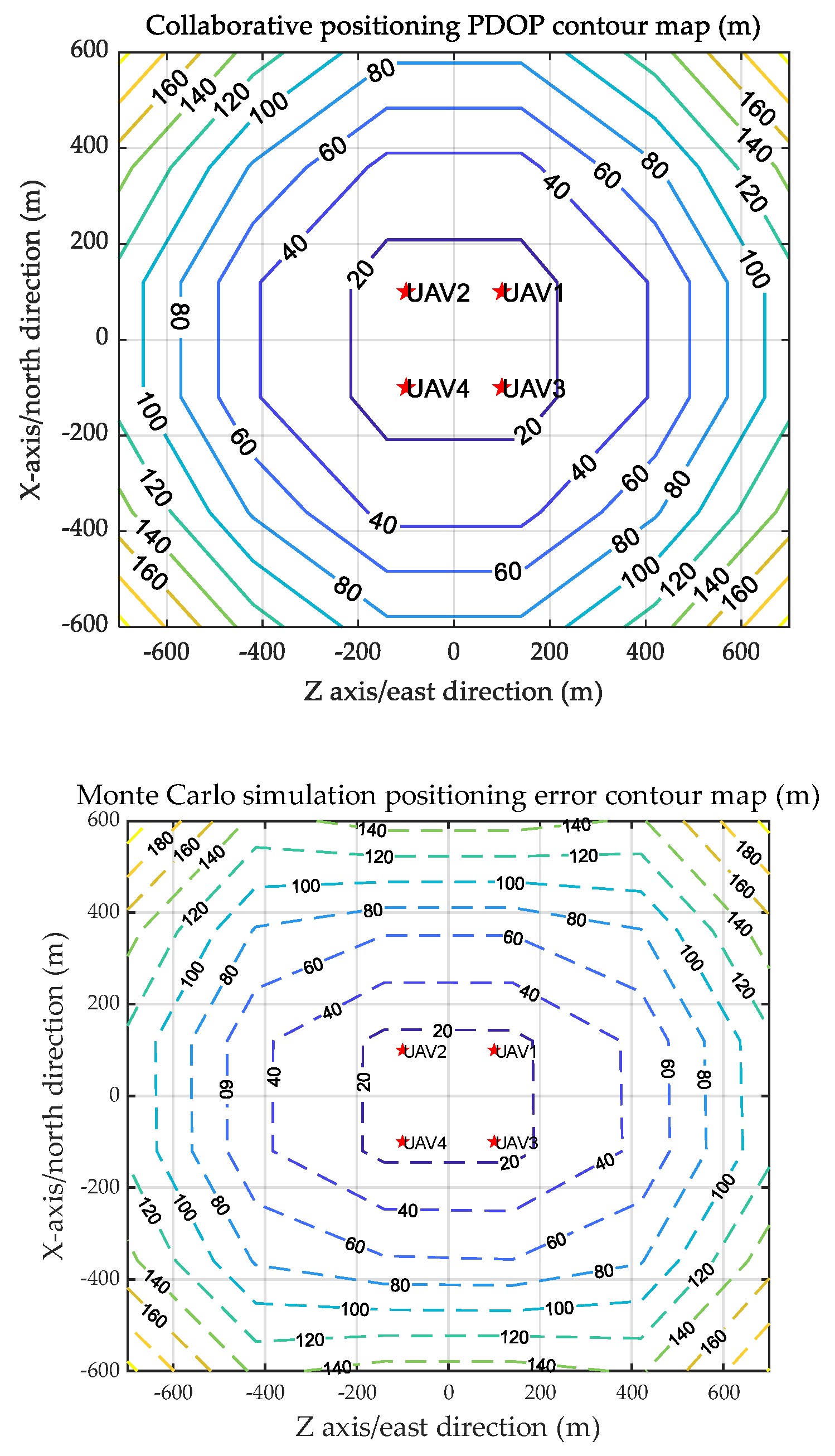
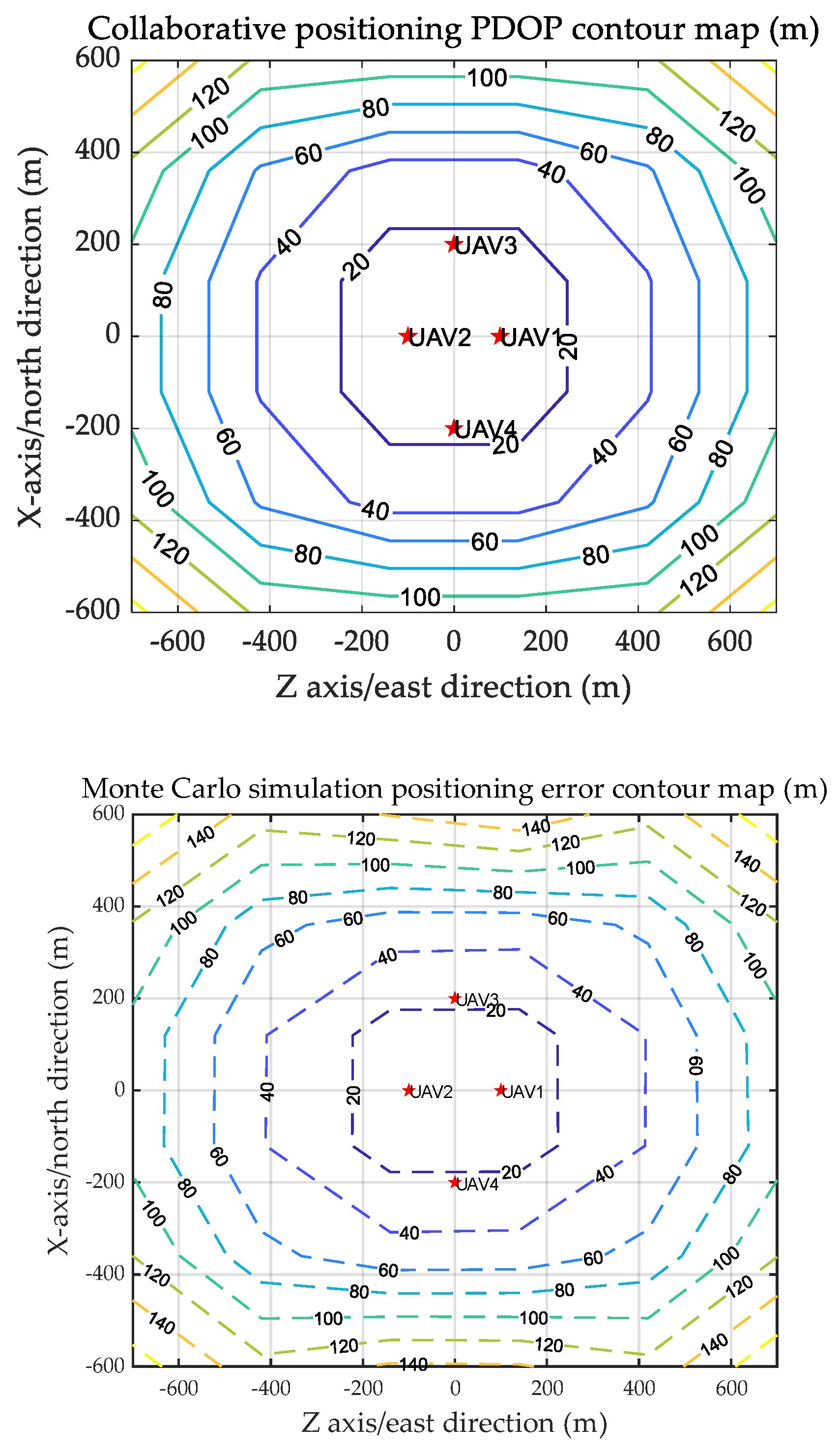
4.2. Collaborative Positioning Error Model Based on PDOP
4.3. Error Analysis
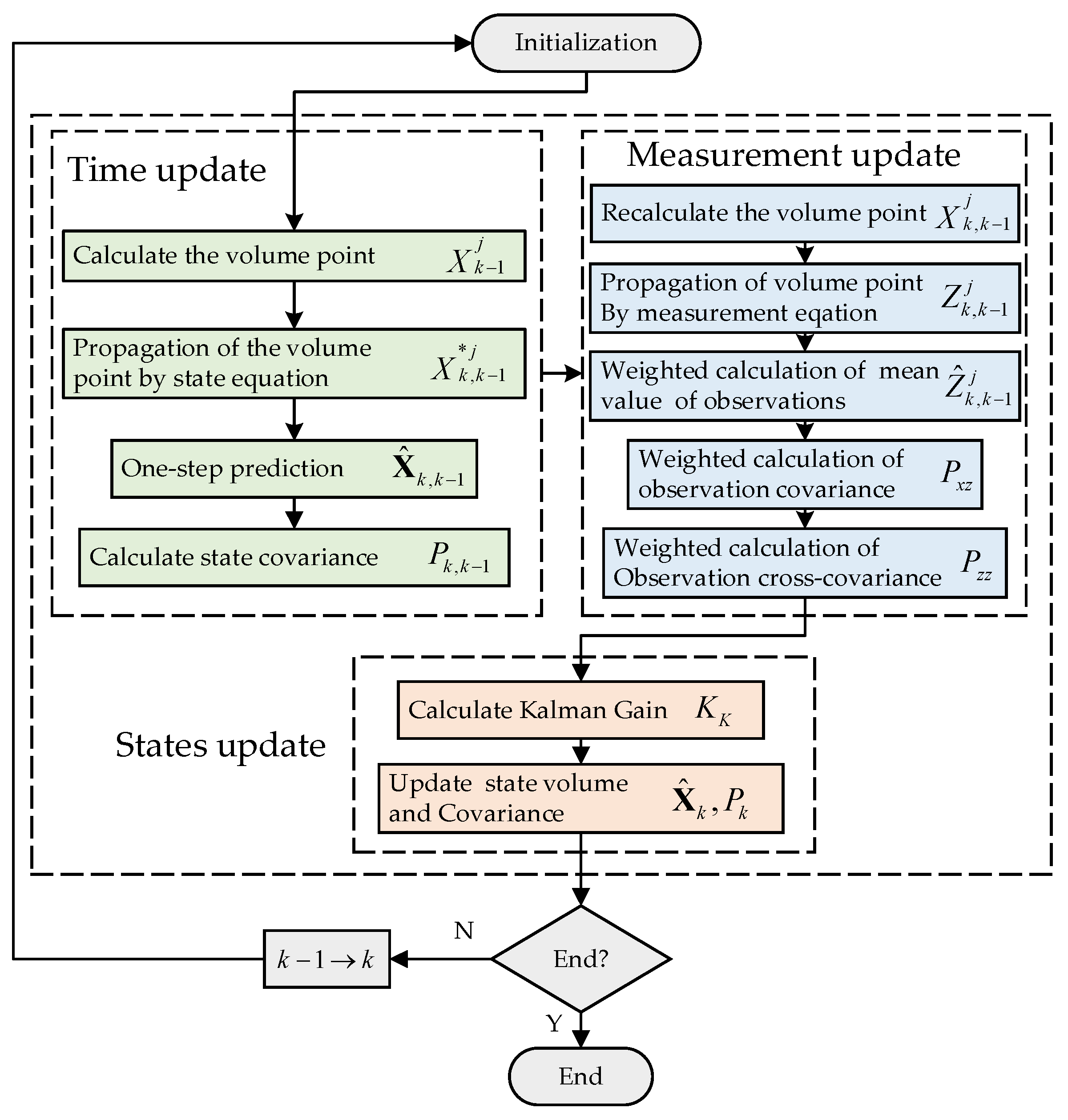
5. Target Localization Method Based on Cubature Kalman Filter
6. Simulation and Analysis
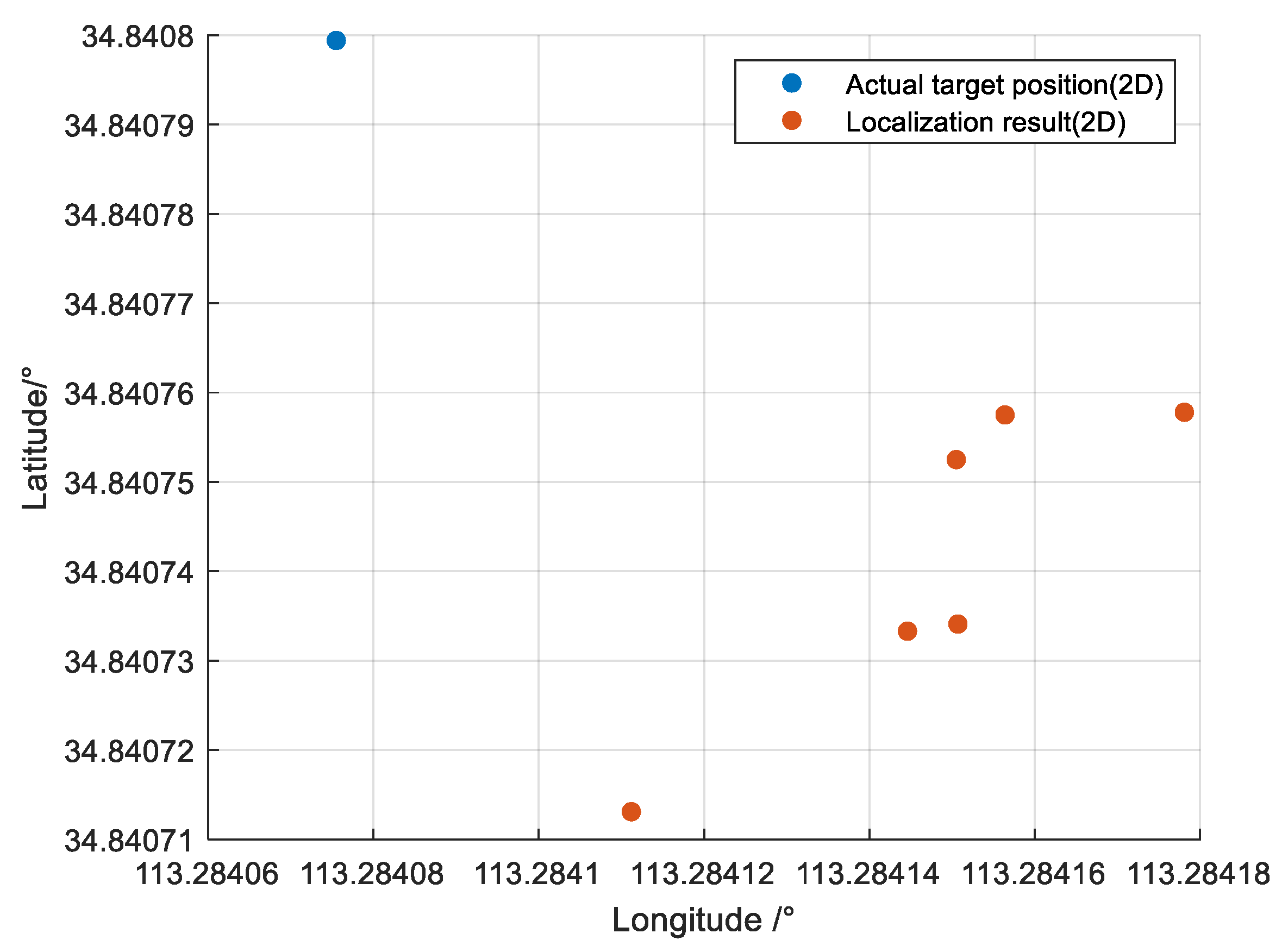
6.1. Co-Localization Algorithm Verification
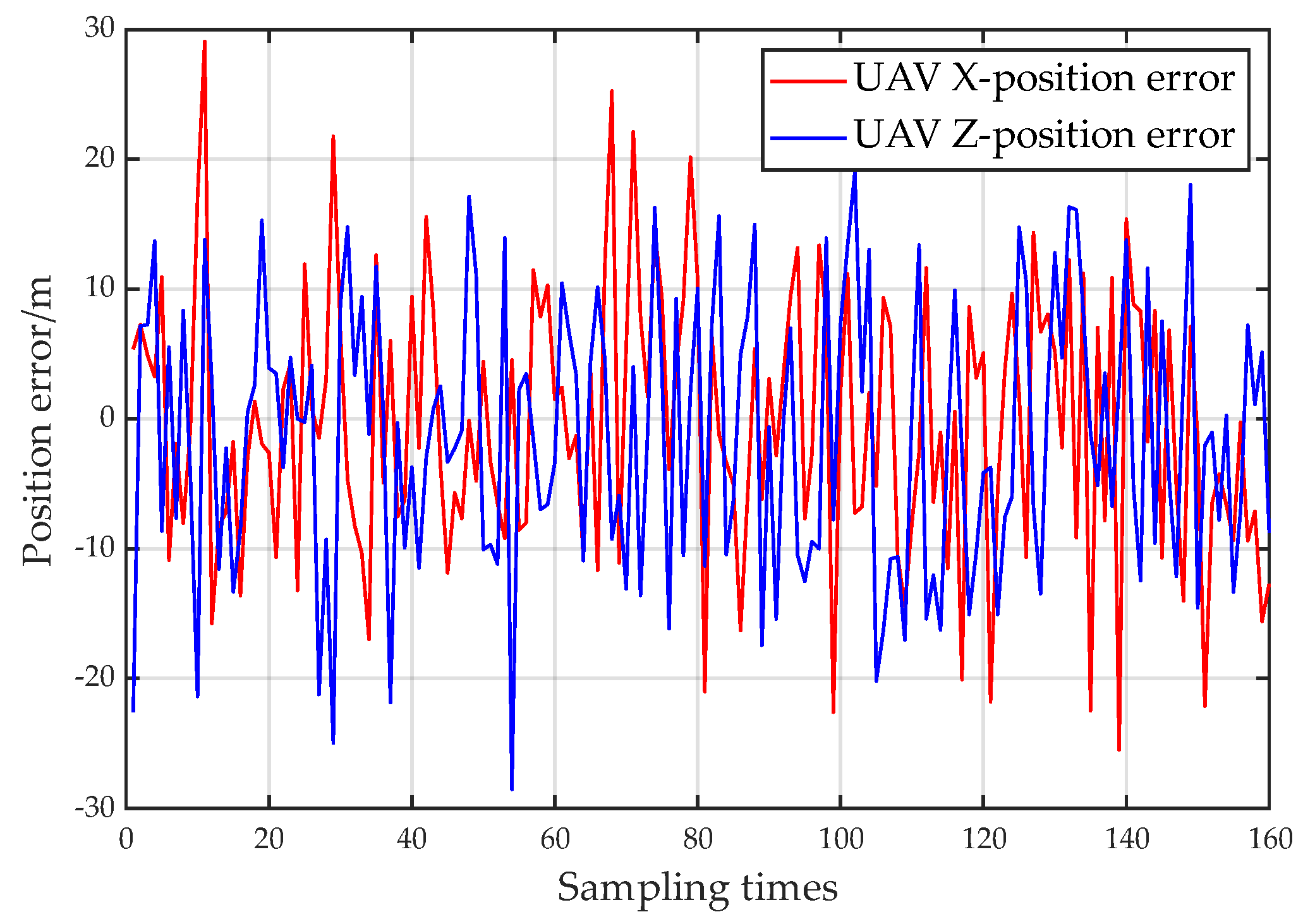
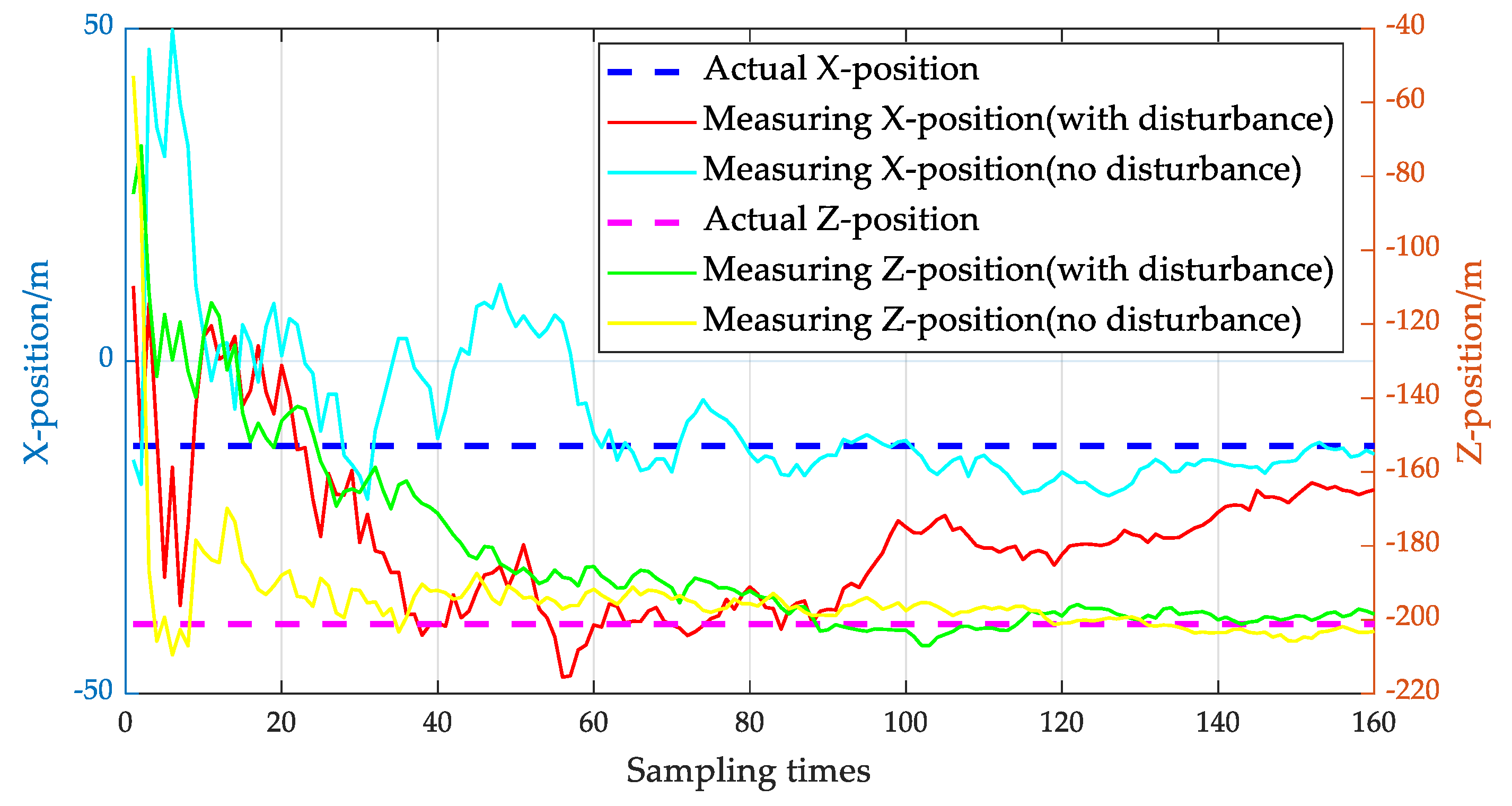
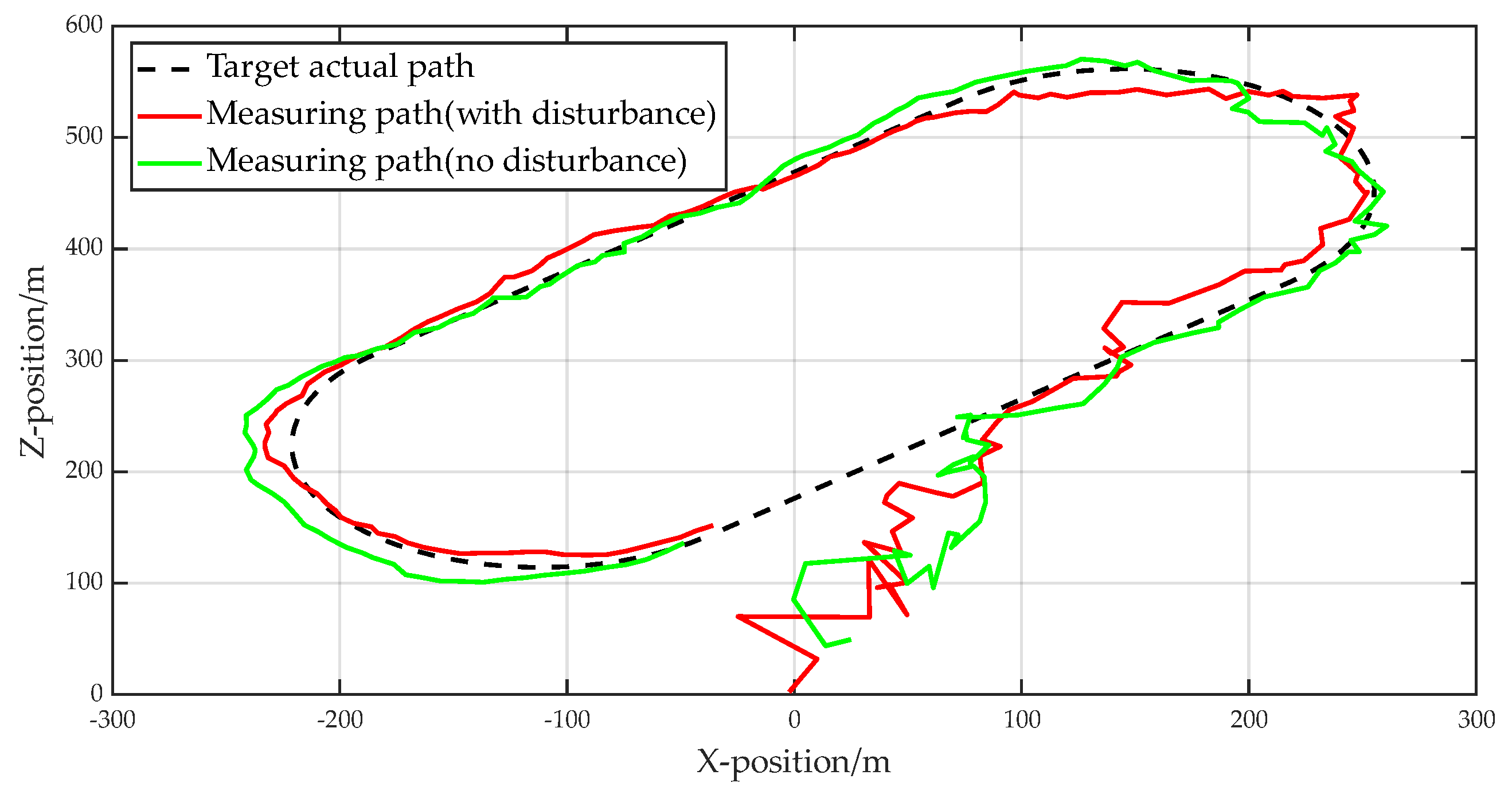
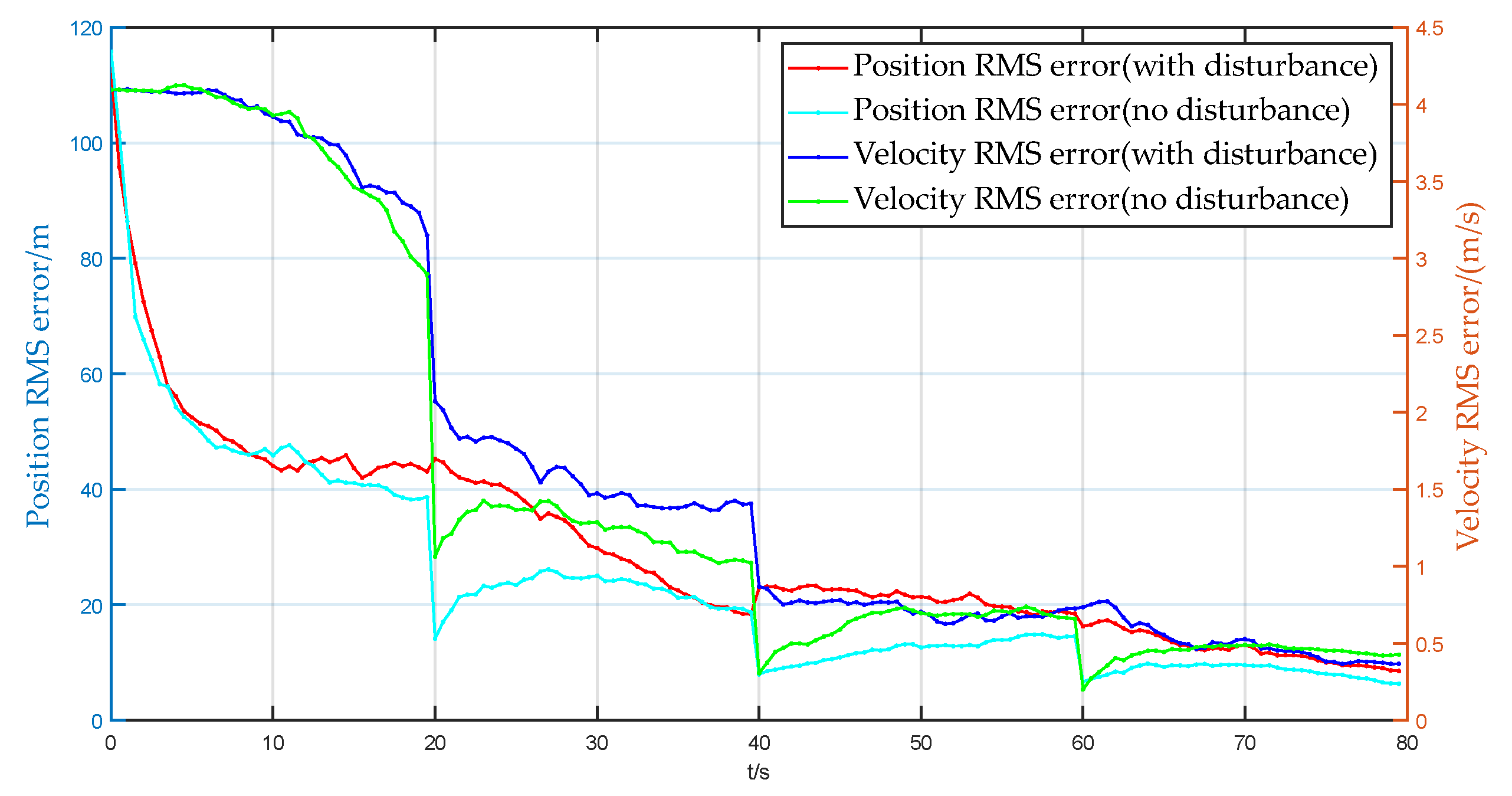
6.2. Multi-UAV Co-Location and Tracking
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chen, W.-C.; Lin, C.-L.; Chen, Y.-Y.; Cheng, H.-H. Quadcopter Drone for Vision-Based Autonomous Target Following. Aerospace 2023, 10, 82. [Google Scholar] [CrossRef]
- Elmeseiry, N.; Alshaer, N.; Ismail, T. A Detailed Survey and Future Directions of Unmanned Aerial Vehicles (UAVs) with Potential Applications. Aerospace 2021, 8, 363. [Google Scholar] [CrossRef]
- Cai, Y.; Guo, H.; Zhou, K.; Xu, L. Unmanned Aerial Vehicle Cluster Operations under the Background of Intelligentization. In Proceedings of the 2021 3rd International Conference on Artificial Intelligence and Advanced Manufacture (AIAM), Manchester, UK, 23–25 October 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 525–529. [Google Scholar] [CrossRef]
- Chen, X.; Qin, K.; Luo, X.; Huo, H.; Gou, R.; Li, R.; Wang, J.; Chen, B. Distributed Motion Control of UAVs for Cooperative Target Location Under Compound Constraints. In Proceedings of the 2021 18th International Computer Conference on Wavelet Active Media Technology and Information Processing (ICCWAMTIP), Chengdu, China, 17–19 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 576–580. [Google Scholar] [CrossRef]
- Kim, B.; Pak, J.; Ju, C.; Son, H.I. A Multi-Antenna-based Active Tracking System for Localization of Invasive Hornet Vespa velutina. In Proceedings of the 2022 22nd International Conference on Control, Automation and Systems (ICCAS), Jeju, Republic of Korea, 27 November–1 December 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 1693–1697. [Google Scholar] [CrossRef]
- Li, H.; Fan, X.; Shi, M. Research on the Cooperative Passive Location of Moving Targets Based on Improved Particle Swarm Optimization. Drones 2023, 7, 264. [Google Scholar] [CrossRef]
- Wang, S.; Li, Y.; Qi, G.; Sheng, A. Sensor Selection and Deployment for Range-Only Target Localization Using Optimal Sensor-Target Geometry. IEEE Sens. J. 2023, 23, 21757–21766. [Google Scholar] [CrossRef]
- Zhao, Y.; Hu, D.; Zhao, Y.; Liu, Z. Moving target localization for multistatic passive radar using delay, Doppler and Doppler rate measurements. J. Syst. Eng. Electron. 2020, 31, 939–949. [Google Scholar] [CrossRef]
- Sudano, J.J. An exact conversion from an Earth-centered coordinate system to latitude, longitude and altitude. In Proceedings of the IEEE 1997 National Aerospace and Electronics Conference, NAECON 1997, Dayton, OH, USA, 14–17 July 1997; IEEE: Piscataway, NJ, USA, 1997; Volume 2, pp. 646–650. [Google Scholar] [CrossRef]
- Wang, M.; Zhang, D.; Tang, S.; Xu, B.; Zhao, J. Online Task Planning Method for Drone Swarm based on Dynamic Coalition Strategy. Acta Armamentarii 2023, 44, 2207–2223. [Google Scholar]
- Du, M.; Li, S.; Zheng, K.; Li, H.; Che, X. Target Location Method of Small Unmanned Reconnaissance Platform Based on POS Data. In Proceedings of the 2021 International Conference on Autonomous Unmanned Systems, Changsha, China, 24–26 September 2021. [Google Scholar]
- Wu, L.; Wang, B.; Wei, J.; He, S.; Zhao, Y. Dual-aircraft passive localization model based on AOA and its solving method. Syst. Eng. Electron. Technol. 2020, 42, 978–986. [Google Scholar]
- Fan, B.; Li, G.; Li, P.; Yi, W.; Yang, Z. Research and Application of PDOP Model for Laser Interferometry Measurement of Three-Dimensional Point Coordinates. Surv. Mapp. Bull. 2015, 11, 28–31. [Google Scholar]
- Yang, K.; Huang, J. Positioning Accuracy Evaluation of Satellite Navigation Systems. Mar. Surv. Mapp. 2009, 29, 26–28. [Google Scholar]
- Qin, Y.; Zhang, H.; Wang, S. Kalman Filter and Combined Navigation Principles; Northwestern Polytechnical University Press: Xi’an, China, 2015. [Google Scholar]
- Neusypin, K.; Kupriyanov, A.; Maslennikov, A.; Selezneva, M. Investigation into the nonlinear Kalman filter to correct the INS/GNSS integrated navigation system. GPS Solut. 2023, 27, 91. [Google Scholar] [CrossRef]
- Gong, B.; Wang, S.; Hao, M.; Guan, X.; Li, S. Range-based collaborative relative navigation for multiple unmanned aerial vehicles using consensus extended Kalman filter. Aerosp. Sci. Technol. 2021, 112, 106647. [Google Scholar] [CrossRef]
- Easton, P.; Kalin, N.; Joshua, M. Invariant Extended Kalman Filtering for Underwater Navigation. IEEE Robot. Autom. Lett. 2021, 6, 5792–5799. [Google Scholar]
- Yue, J.; Wang, H.; Zhu, D.; Aleksandr, C. UAV formation cooperative navigation algorithm based on improved particle filtering. Chin. J.f Aeronaut. 2023, 44, 251–262. [Google Scholar]
- Liu, Y.; He, Z.; Lu, Y.; Di, K.; Wen, D.; Zou, X. Autonomous navigation and localization in IMU/UWB group domain based on particle filtering. Transducer Microsyst. Technologies. 2022, 41, 47–50. [Google Scholar]
- Ienkaran, A.; Simon, H. Cubature Kalman Filters. IEEE Trans. Autom. Control 2009, 54, 1254–1269. [Google Scholar]
- Luo, Q.; Shao, Y.; Li, J.; Yan, X.; Liu, C. A multi-AUV cooperative navigation method based on the augmented adaptive embedded cubature Kalman filter algorithm. Neural Comput. Appl. 2022, 34, 18975–18992. [Google Scholar] [CrossRef]
- Liu, W.; Shi, Y.; Hu, Y.; Hsieh, T.H.; Wang, S. An improved GNSS/INS navigation method based on cubature Kalman filter for occluded environment. Meas. Sci. Technol. 2023, 34, 035107. [Google Scholar] [CrossRef]
- Gao, B.; Hu, G.; Zhang, L.; Zhong, Y.; Zhi, X. Cubature Kalman filter with closed-loop covariance feedback control for integrated INS/GNSS navigation. Chin. J. Aeronaut. 2023, 36, 363–376. [Google Scholar] [CrossRef]
- Jin, G.; Tan, L. Targeting Technology for Unmanned Reconnaissance Aircraft Optronic Platforms; Xi’an University of Electronic Science and Technology Press: Xi’an, China, 2012. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Signal | Numerical Value |
|---|---|---|
| pitch/° | 1.2 | |
| yaw/° | 0 | |
| roll/° | −0.5 | |
| Installation pitch/° | 0 | |
| Installation yaw/° | 0 | |
| Installation roll/° | 0 | |
| Frame altitude angle/° | −1.2 | |
| Frame azimuth angle/° | 0.5 | |
| Look down angle/° | −90 |
| Parameter | Signal | Value |
|---|---|---|
| Field of view | × | 28° × 21° |
| Resolution | × | 4096 × 3072 |
| Horizontal half field of view | 14° | |
| Vertical half field of view | 10.5° | |
| Principal point position | (, ) | (2047, 1535) |
| Parameter | Signal | Error Range |
|---|---|---|
| Pitch error/° | N (0, 0.8) | |
| Yaw error/° | N (0, 0.8) | |
| Roll error/° | N (0, 0.8) | |
| Installation pitch error/° | N (0, 0.2) | |
| Installation yaw error/° | N (0, 0.2) | |
| Installation roll error/° | N (0, 0.2) | |
| Frame altitude angle error/° | N (0, 0.1) | |
| Frame azimuth angle error/° | N (0, 0.1) |
| ID | Point | Pixel Coordinate | Distribution of AOA Altitude Angle/°(Monte Carlo) | Distribution of AOA Altitude Angle/°(PDOP) | Distribution of AOA Azimuth Angle/°(Monte Carlo) | Distribution of AOA Altitude Angle/°(PDOP) |
|---|---|---|---|---|---|---|
| 1 | A | (0, 0) | N (−72.747, 0.810) | N (−72.75, 0.806) | N (143.377, 2.734) | N (143.38, 2.717) |
| 2 | B | (4096, 0) | N (−72.733, 0.803) | N (−72.74, 0.806) | N (36.590, 2.701) | N (36.59, 2.715) |
| 3 | C | (4096, 3072) | N (−72.702, 0.799) | N (−72.73, 0.806) | N (−36.655, 2.715) | N (−36.63, 2.714) |
| 4 | D | (0, 3072) | N (−72.726, 0.808) | N (−72.74, 0.806) | N (−143.310, 2.727) | N (−143.34, 2.716) |
| Point Coordinates | Symbol | Value 1/m | Value 2/m |
|---|---|---|---|
| UAV1 | (x1, y1, z1) | (50, 0, 0) | (25, 0, 0) |
| UAV2 | (x2, y2, z2) | (−50, 0, 0) | (−25, 0, 0) |
| Point Coordinates | Symbol | Square Formation Flying/m | Diamond Formation Flying/m |
|---|---|---|---|
| UAV1 | (x1, z1) | (100, 100) | (0, 100) |
| UAV2 | (x2, z2) | (100, −100) | (0, −100) |
| UAV3 | (x3, z3) | (−100, 100) | (200, 0) |
| UAV4 | (x4, z4) | (−100, −100) | (−200, 0) |
| UAV ID | UAV Pose | Installation Angle (Pitch, Yaw, Roll) | Frame Angle (Alt., Azim.) | |
|---|---|---|---|---|
| UAV Position (Lng., Lat., Alt.) | UAV Attitude (Pitch, Yaw, Roll) | |||
| 1 | 113.285672, 34.840742, 1988.7 | 3.25, 75.52, 1.32 | −90, 0, 0 | −3.27, −1.24 |
| 2 | 113.283782, 34.840863, 1987.8 | 3.41, 75.55, 2.98 | −90, 0, 0 | −3.52, −2.69 |
| 3 | 113.285258, 34.840542, 1986.6 | 2.75, 267.91, 0.89 | −90, 0, 0 | −2.76, −1.26 |
| 4 | 113.284669, 34.841472, 1980.9 | 3.36, 267.42, 1.62 | −90, 0, 0 | −3.37, −1.78 |
| 5 | 113.283662, 34.839757, 1978.0 | 2.49, 144.30, 0.40 | −90, 0, 0 | −2.54, −0.39 |
| 6 | 113.284839, 34.840663, 982.3 | 3.34, 144.85, −0.08 | −90, 0, 0 | −3.40, 0.10 |
| 7 | 113.283124, 34.840924, 982.2 | 3.75, 80.46, 3.67 | −90, 0, 0 | −3.79, −3.57 |
| 8 | 113.283091, 34.840818, 980.3 | 3.60, 79.11, 4.12 | −90, 0, 0 | −3.62, −4.13 |
| 9 | 113.285250, 34.840497, 980.1 | 6.15, 260.06, 3.47 | −90, 0, 0 | −6.23, −3.55 |
| 10 | 113.284723, 34.841950, 978.6 | 4.82, 261.98, −0.96 | −90, 0, 0 | −4.82, 0.81 |
| 11 | 113.284085, 34.840844, 976.0 | 2.79, 145.32, −1.25 | −90, 0, 0 | −2.79, 1.14 |
| 12 | 113.285672, 34.840742, 1988.7 | 2.81, 145.20, 2.55 | −90, 0, 0 | −2.87, −2.37 |
| Actual Target Position (2D) | Localization Result (2D) | Localization Error/m | ||
|---|---|---|---|---|
| Lng. | Lat. | Lng. | Lat. | |
| 113.284076 | 34.840799 | 113.284151 | 34.840752 | 8.6 |
| 113.284111 | 34.840713 | 10.1 | ||
| 113.284178 | 34.840758 | 10.5 | ||
| 113.284145 | 34.840733 | 9.8 | ||
| 113.284151 | 34.840734 | 9.9 | ||
| 113.284156 | 34.840757 | 8.7 | ||
| Simulation Parameters | Range |
|---|---|
| Target initial state | Stationary: Moving: |
| Number | 4 |
| Error | 0.81° (AOA altitude angle) 2.73° (AOA azimuth angle) |
| Noise | Gaussian White Noise |
| Sampling step | 500 ms |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, M.; Zou, H.; Wang, T.; Zhu, K. A Cooperative Target Localization Method Based on UAV Aerial Images. Aerospace 2023, 10, 943. https://doi.org/10.3390/aerospace10110943
Du M, Zou H, Wang T, Zhu K. A Cooperative Target Localization Method Based on UAV Aerial Images. Aerospace. 2023; 10(11):943. https://doi.org/10.3390/aerospace10110943
Chicago/Turabian StyleDu, Minglei, Haodong Zou, Tinghui Wang, and Ke Zhu. 2023. "A Cooperative Target Localization Method Based on UAV Aerial Images" Aerospace 10, no. 11: 943. https://doi.org/10.3390/aerospace10110943
APA StyleDu, M., Zou, H., Wang, T., & Zhu, K. (2023). A Cooperative Target Localization Method Based on UAV Aerial Images. Aerospace, 10(11), 943. https://doi.org/10.3390/aerospace10110943