

Movement Direction Classification Using Low-Resolution ToF Sensor and LSTM-Based Neural Network


Abstract
1. Introduction
2. Background
2.1. Research on People Counting
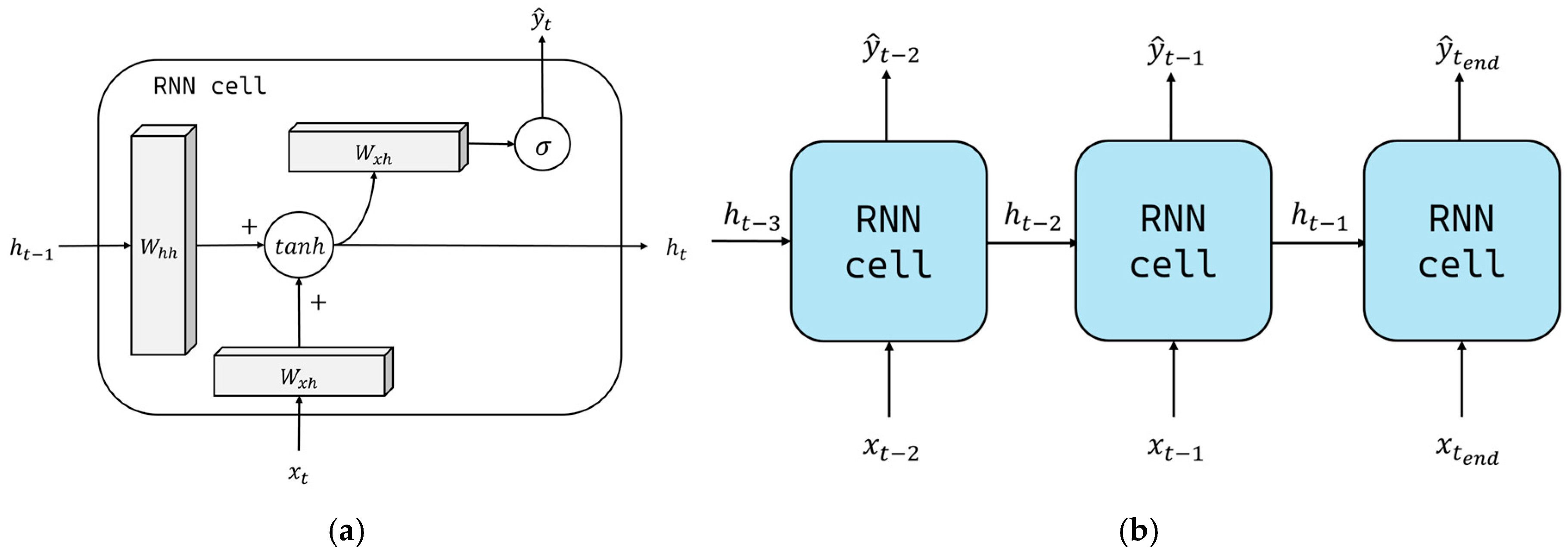
2.2. Overview of Recurrent Neural Network and LSTM
3. Materials and Methods
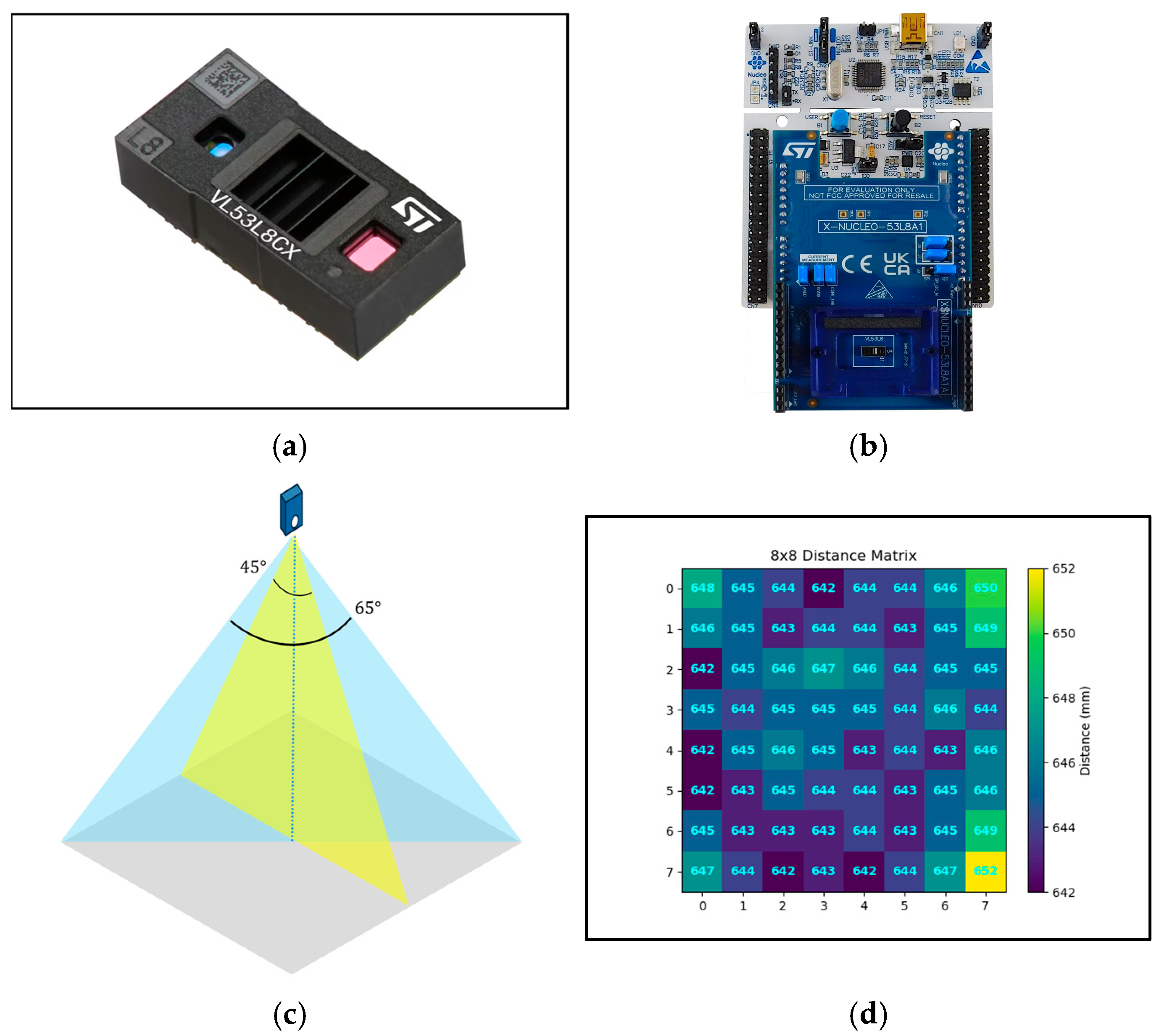
3.1. ToF Sensor
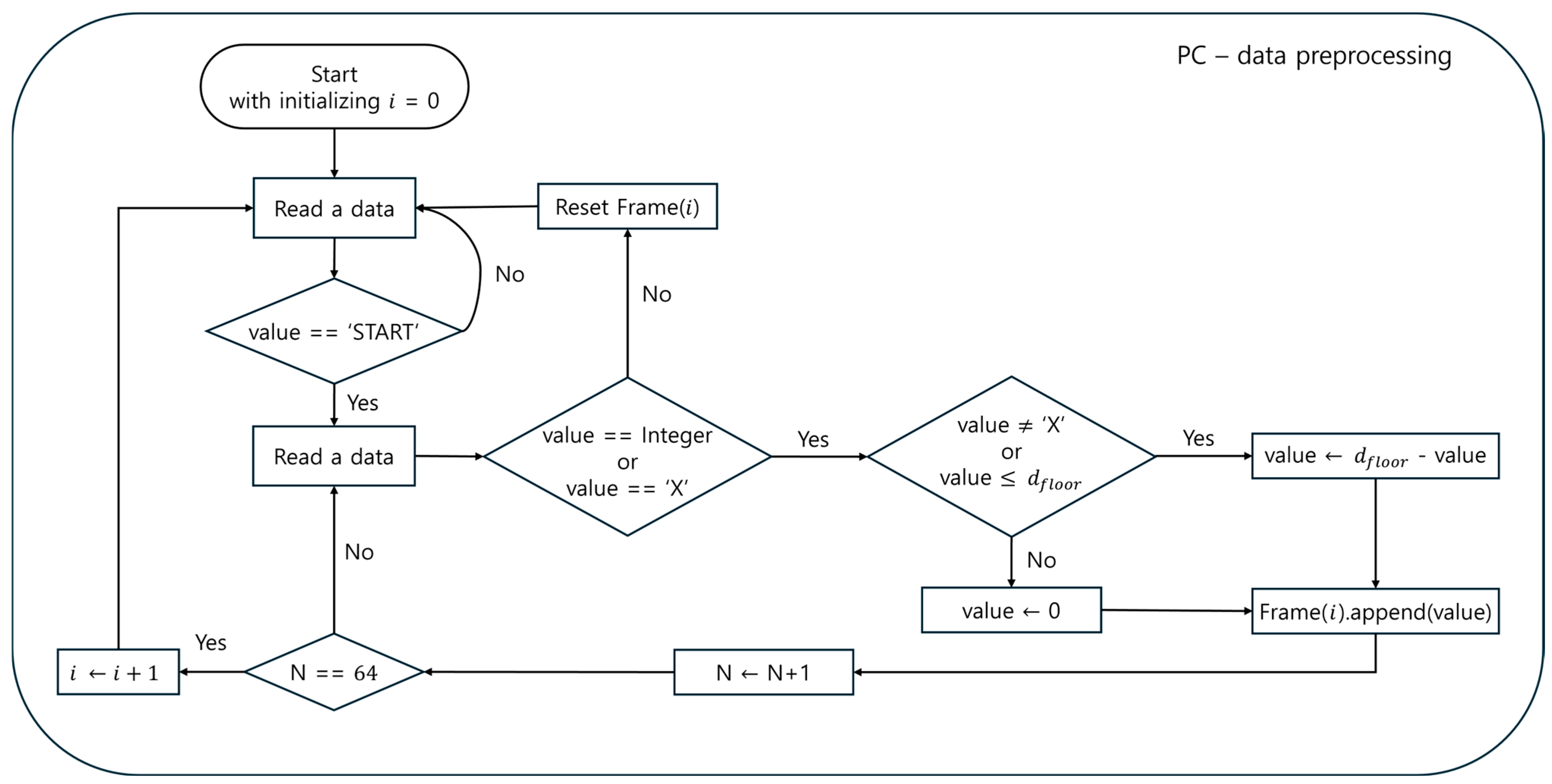
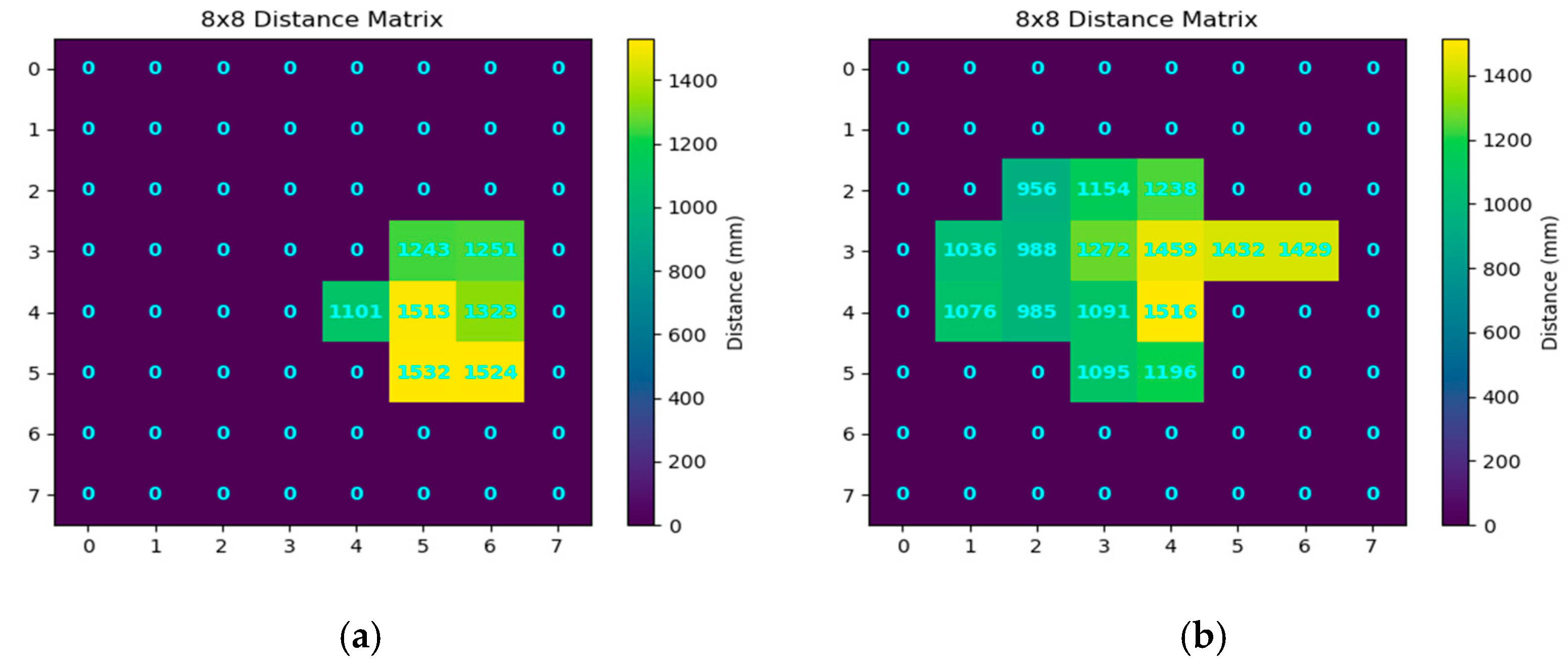
3.2. Data Preprocessing
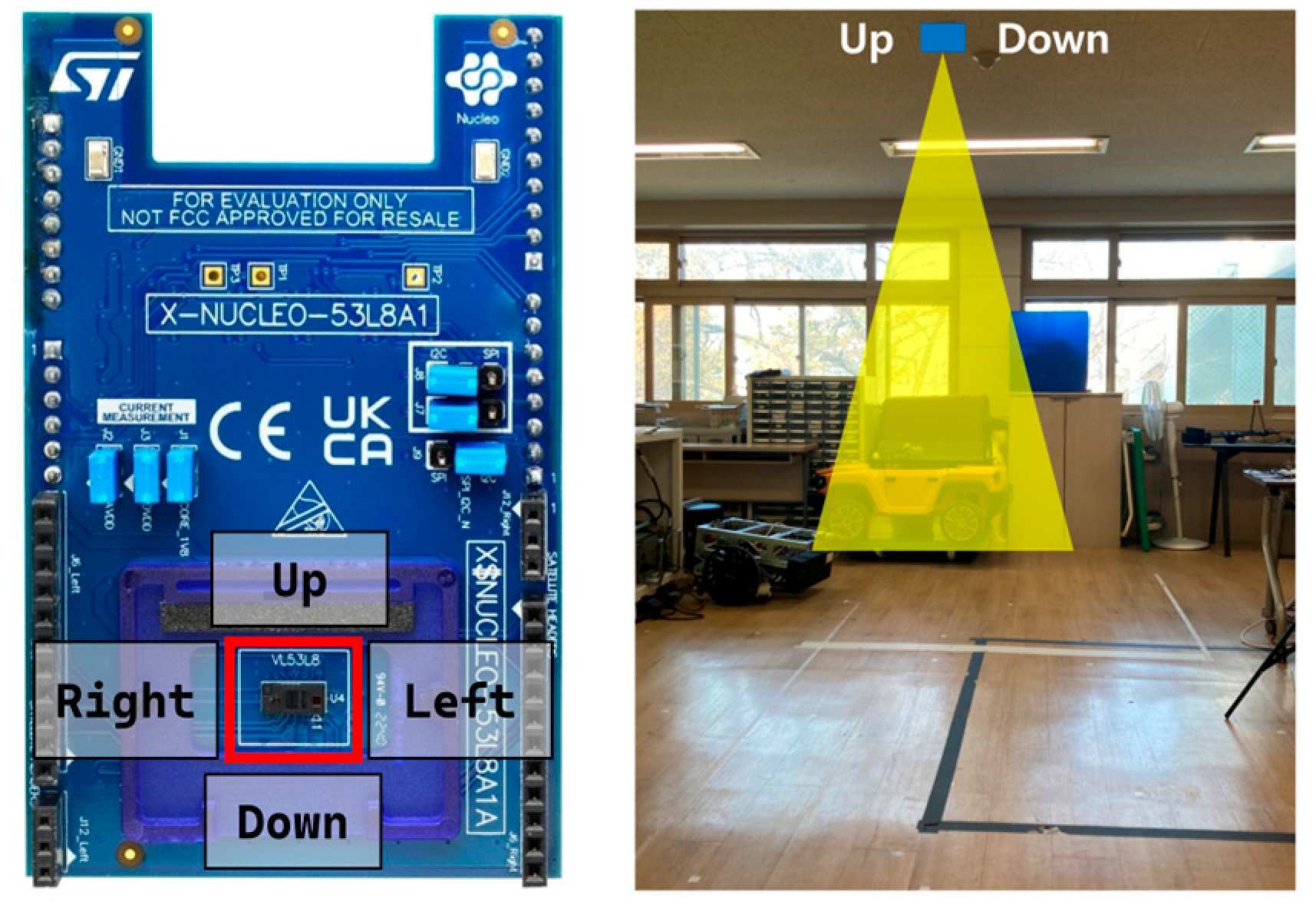
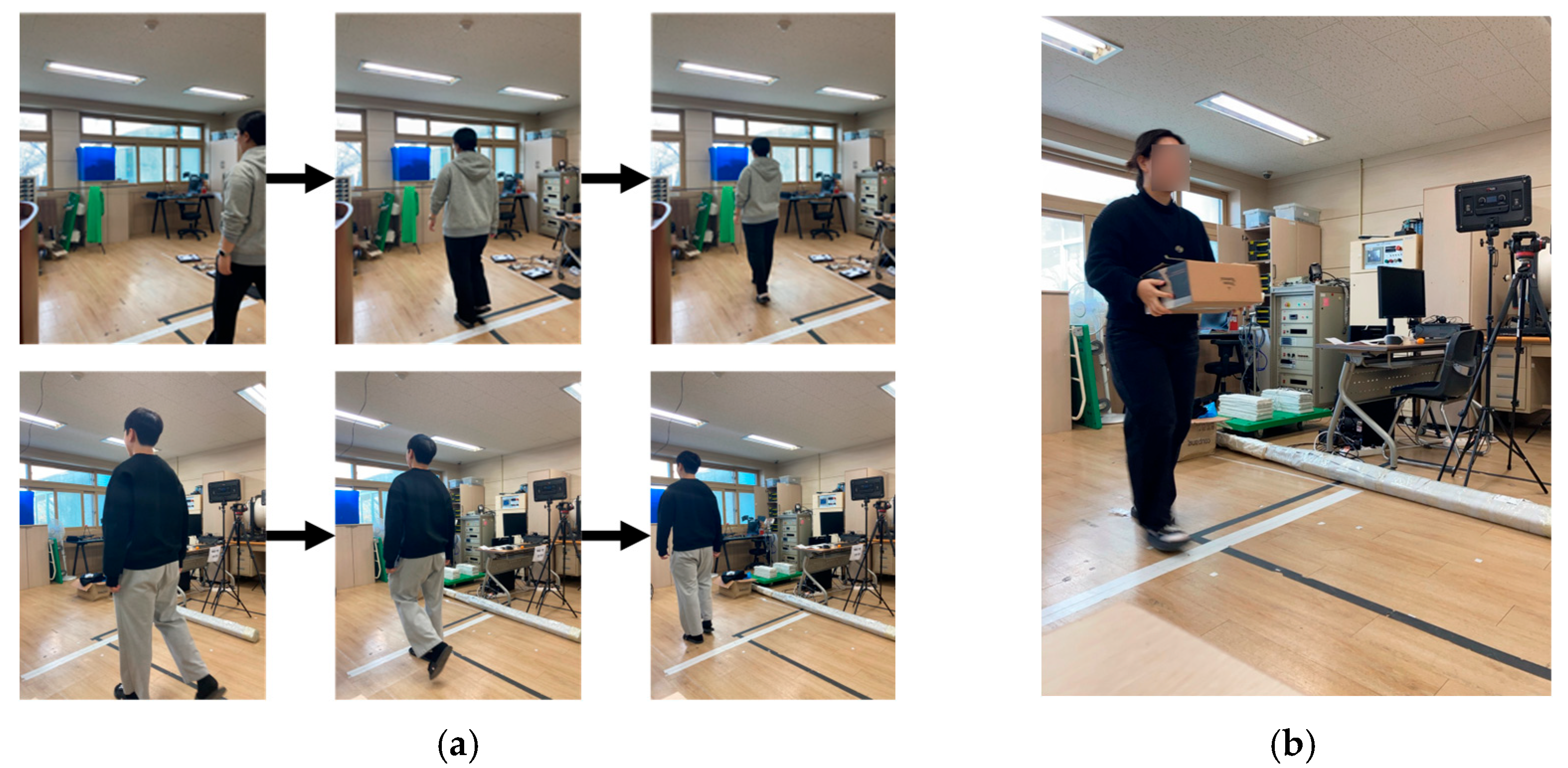
3.3. Dataset Collection
3.4. Neural Network Training Parameters
4. Results
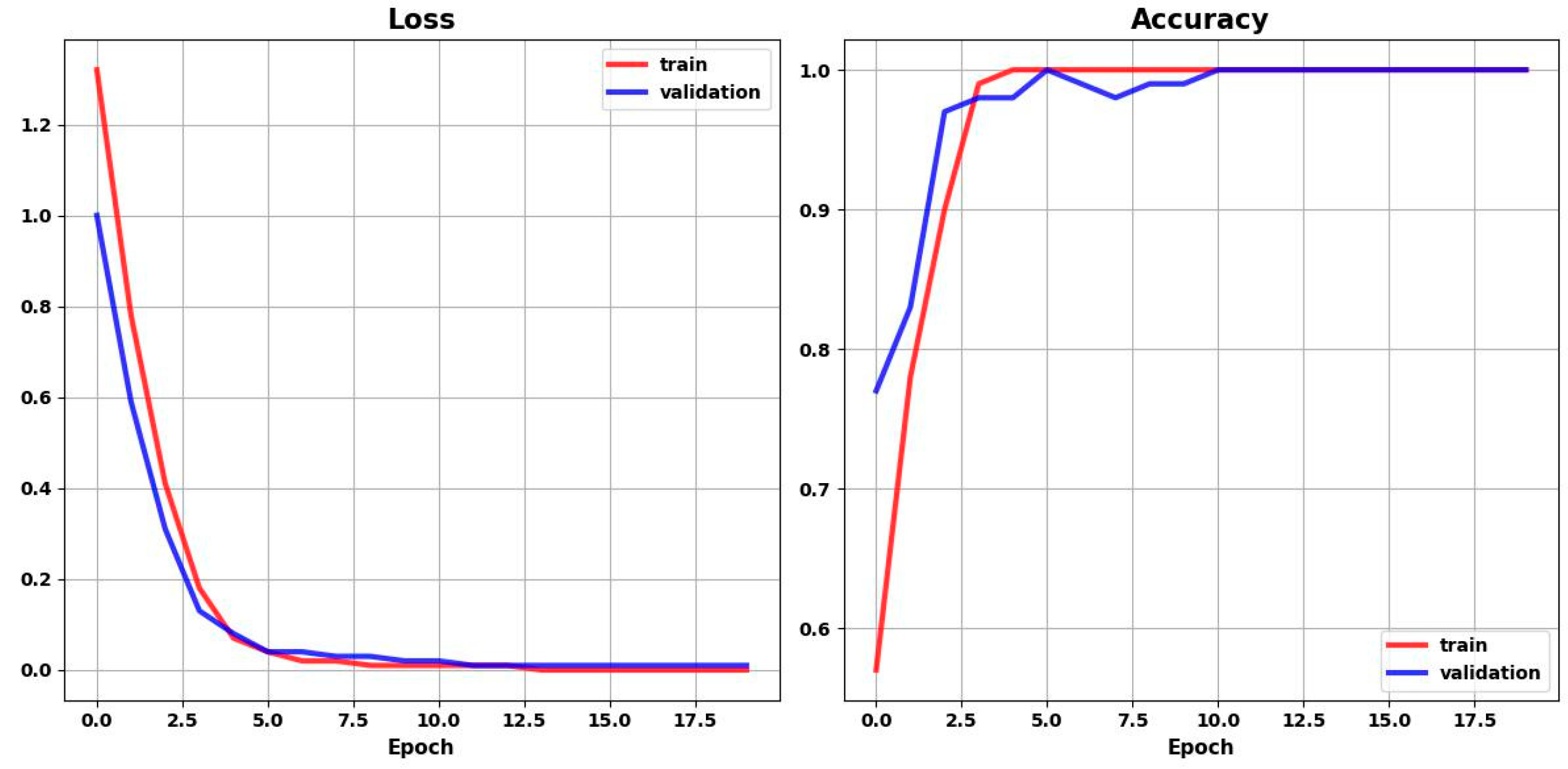
4.1. Neural Network Training
4.2. Test Results
5. Discussion
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Aazami, R.; Moradi, M.; Shirkhani, M.; Harrison, A.; Al-Gahtani, S.F.; Elbarbary, Z. Technical Analysis of Comfort and Energy Consumption in Smart Buildings with Three Levels of Automation: Scheduling, Smart Sensors, and IoT. IEEE Access 2025, 13, 8310. [Google Scholar] [CrossRef]
- Poyyamozhi, M.; Murugesan, B.; Rajamanickam, N.; Shorfuzzaman, M.; Aboelmagd, Y. IoT—A Promising Solution to Energy Management in Smart Buildings: A Systematic Review, Applications, Barriers, and Future Scope. Buildings 2024, 14, 3446. [Google Scholar] [CrossRef]
- Choi, W.; Kang, I.; Kim, C. A Study on Energy Saving and Safety Improvement through IoT Sensor Monitoring in Smart Factory. J. Soc. Disaster Inf. 2024, 20, 117–127. [Google Scholar]
- Singh, S.; Aggarwal, N.; Dabas, D. Empowering homes through energy efficiency: A comprehensive review of smart home systems and devices. Int. J. Energy Sect. Manag. 2024. ahead-of-print. [Google Scholar] [CrossRef]
- Mena-Martinez, A.; Alvarado-Uribe, J.; Molino-Minero-Re, E.; Ceballos, H.G. Indoor occupancy monitoring using environmental feature fusion and semi-supervised machine learning models. J. Build. Perform. Simul. 2024, 17, 695–717. [Google Scholar] [CrossRef]
- Tsang, T.-W.; Mui, K.-W.; Wong, L.-T.; Chan, A.C.-Y.; Chan, R.C.-W. Real-Time Indoor Environmental Quality (IEQ) Monitoring Using an IoT-Based Wireless Sensing Network. Sensors 2024, 24, 6850. [Google Scholar] [CrossRef]
- Zhong, C.; Sun, J.; Xie, J.; Grijalva, S.; Meliopoulos, A.S. Real-time human activity-based energy management system using model predictive control. In Proceedings of the 2018 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 12–14 January 2018; pp. 1–6. [Google Scholar]
- Shahbazian, R.; Trubitsyna, I. Human sensing by using radio frequency signals: A survey on occupancy and activity detection. IEEE Access 2023, 11, 40878–40904. [Google Scholar] [CrossRef]
- Allik, A.; Muiste, S.; Pihlap, H. Movement Based Energy Management Models for Smart Buildings. In Proceedings of the 2019 7th International Conference on Smart Grid (icSmartGrid), Newcastle, Australia, 9–11 December 2019; pp. 87–91. [Google Scholar]
- Saputro, A.H.; Imawan, C. Local and global human activity detection for room energy saving model. In Proceedings of the 2016 International Conference on Advanced Computer Science and Information Systems (ICACSIS), Malang, Indonesia, 15–16 October 2016; pp. 413–416. [Google Scholar]
- Li, T.; Liu, X.; Li, G.; Wang, X.; Ma, J.; Xu, C.; Mao, Q. A systematic review and comprehensive analysis of building occupancy prediction. Renew. Sustain. Energy Rev. 2024, 193, 114284. [Google Scholar] [CrossRef]
- Sekiguchi, T.; Kato, H. Privacy Assuring Video-Based Monitoring System Considering Browsing Purposes. In Proceedings of the 2005 Symposium on Applications and the Internet Workshops (SAINT 2005 Workshops), Trento, Italy, 31 January–4 February 2005; pp. 464–467. [Google Scholar]
- Hasan, M.R.; Guest, R.; Deravi, F. Presentation-level privacy protection techniques for automated face recognition—A survey. ACM Comput. Surv. 2023, 55, 286. [Google Scholar] [CrossRef]
- Klauser, D.; Bärwolff, G.; Schwandt, H. A TOF-based automatic passenger counting approach in public transportation systems. In AIP Conference Proceedings; American Institute of Physics: Washington, DC, USA, 2015; Volume 1648. [Google Scholar]
- Diraco, G.; Leone, A.; Siciliano, P. People occupancy detection and profiling with 3D depth sensors for building energy management. Energy Build. 2015, 92, 246–266. [Google Scholar] [CrossRef]
- Li, F.; Willomitzer, F.; Balaji, M.M.; Rangarajan, P.; Cossairt, O. Exploiting wavelength diversity for high resolution time-of-flight 3D imaging. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 2193–2205. [Google Scholar] [CrossRef] [PubMed]
- Lu, H.; Tuzikas, A.; Radke, R.J. A zone-level occupancy counting system for commercial office spaces using low-resolution time-of-flight sensors. Energy Build. 2021, 252, 111390. [Google Scholar] [CrossRef]
- Zappi, P.; Farella, E.; Benini, L. Enhancing the spatial resolution of presence detection in a PIR based wireless surveillance network. In Proceedings of the 2007 IEEE Conference on Advanced Video and Signal Based Surveillance, London, UK, 5–7 September 2007; pp. 295–300. [Google Scholar]
- Wahl, F.; Milenkovic, M.; Amft, O. A distributed PIR-based approach for estimating people count in office environments. In Proceedings of the 2012 IEEE 15th International Conference on Computational Science and Engineering, Paphos, Cyprus, 5–7 December 2012; pp. 640–647. [Google Scholar]
- Sun, K.; Zhao, Q.; Zou, J. A review of building occupancy measurement systems. Energy Build. 2020, 216, 109965. [Google Scholar] [CrossRef]
- Chandran, A.K.; Poh, L.A.; Vadakkepat, P. Real-time identification of pedestrian meeting and split events from surveillance videos using motion similarity and its applications. J. Real-Time Image Process. 2019, 16, 971–987. [Google Scholar] [CrossRef]
- Tien, P.W.; Wei, S.; Calautit, J.K.; Darkwa, J.; Wood, C. A vision-based deep learning approach for the detection and prediction of occupancy heat emissions for demand-driven control solutions. Energy Build. 2020, 226, 110386. [Google Scholar] [CrossRef]
- Zhang, W.; Calautit, J.; Tien, P.W.; Wu, Y.; Wei, S. Deep learning models for vision-based occupancy detection in high occupancy buildings. J. Build. Eng. 2024, 98, 111355. [Google Scholar] [CrossRef]
- Newton, E.M.; Sweeney, L.; Malin, B. Preserving privacy by de-identifying face images. IEEE Trans. Knowl. Data Eng. 2005, 17, 232–243. [Google Scholar] [CrossRef]
- Dai, J.; Wu, J.; Saghafi, B.; Konrad, J.; Ishwar, P. Towards privacy-preserving activity recognition using extremely low temporal and spatial resolution cameras. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Boston, MA, USA, 7–12 June 2015; pp. 68–76. [Google Scholar]
- Ahmad, S.; Morerio, P.; Del Bue, A. Person re-identification without identification via event anonymization. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Paris, France, 1–6 October 2023; pp. 11132–11141. [Google Scholar]
- Yang, Y.; Cao, J.; Liu, X.; Liu, X. Door-monitor: Counting in-and-out visitors with COTS WiFi devices. IEEE Internet Things J. 2019, 7, 1704–1717. [Google Scholar] [CrossRef]
- Cokbas, M.; Ishwar, P.; Konrad, J. Low-resolution overhead thermal tripwire for occupancy estimation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, Seattle, WA, USA, 14–19 June 2020; pp. 88–89. [Google Scholar]
- He, Y.; Zhang, H.; Arens, E.; Merritt, A.; Huizenga, C.; Levinson, R.; Wang, A.; Ghahramani, A.; Alvarez-Suarez, A. Smart detection of indoor occupant thermal state via infrared thermography, computer vision, and machine learning. Build. Environ. 2023, 228, 109811. [Google Scholar] [CrossRef]
- Sherstinsky, A. Fundamentals of recurrent neural network (RNN) and long short-term memory (LSTM) network. Phys. D Nonlinear Phenom. 2020, 404, 132306. [Google Scholar] [CrossRef]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Label | Train | Validation | Test |
|---|---|---|---|
| Rightward | 100 | 10 | 40 |
| Leftward | 100 | 10 | 40 |
| Turn | 100 | 10 | 40 |
| Rightward pair | 65 | 5 | 30 |
| Leftward pair | 65 | 5 | 30 |
| Trial | Leftward | Rightward | Turn | Rightward Pair | Leftward Pair | Success Rate |
|---|---|---|---|---|---|---|
| 1 | 40/40 | 40/40 | 39/40 | 30/30 | 30/30 | 99.44% |
| 2 | 39/40 | 39/40 | 40/40 | 30/30 | 30/30 | 98.89% |
| 3 | 39/40 | 40/40 | 36/40 | 29/30 | 30/30 | 96.67% |
| 4 | 40/40 | 40/40 | 38/40 | 28/30 | 30/30 | 97.78% |
| 5 | 39/40 | 39/40 | 38/40 | 30/30 | 30/30 | 97.78% |
| Total | 197/200 | 198/200 | 191/200 | 147/150 | 150/150 | 98.11% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Oh, S.; Lee, K.M.; Lee, S.Y.; Kwon, N.K. Movement Direction Classification Using Low-Resolution ToF Sensor and LSTM-Based Neural Network. J. Sens. Actuator Netw. 2025, 14, 61. https://doi.org/10.3390/jsan14030061
Oh S, Lee KM, Lee SY, Kwon NK. Movement Direction Classification Using Low-Resolution ToF Sensor and LSTM-Based Neural Network. Journal of Sensor and Actuator Networks. 2025; 14(3):61. https://doi.org/10.3390/jsan14030061
Chicago/Turabian StyleOh, Sejik, Kyoung Min Lee, Seok Young Lee, and Nam Kyu Kwon. 2025. "Movement Direction Classification Using Low-Resolution ToF Sensor and LSTM-Based Neural Network" Journal of Sensor and Actuator Networks 14, no. 3: 61. https://doi.org/10.3390/jsan14030061
APA StyleOh, S., Lee, K. M., Lee, S. Y., & Kwon, N. K. (2025). Movement Direction Classification Using Low-Resolution ToF Sensor and LSTM-Based Neural Network. Journal of Sensor and Actuator Networks, 14(3), 61. https://doi.org/10.3390/jsan14030061