

Data-Driven Approaches for Efficient Vehicle Driving Analysis: A Survey




Abstract
1. Introduction
- We provide a detailed review of current data sources and techniques for efficient vehicle driving analysis, focusing on the availability and relevance of dataset sources and repositories.
- We systematically review the parameters that define efficient vehicle driving by grouping them according to the driver’s efficiency, resource consumption, and route planning efficiency, with further categorization of relevant features. For each type of efficiency, we provide a list of contextual groups and features, identifying the dataset containing the necessary feature if freely available.
- We discuss future trends and perspectives, identifying alternative data sources for efficient vehicle driving analysis, together with perspectives for the development of transportation systems. We also focus on data collection issues revealed by the practical use case on road damage detection while collecting data from mobile phone sensors.
2. Methodology
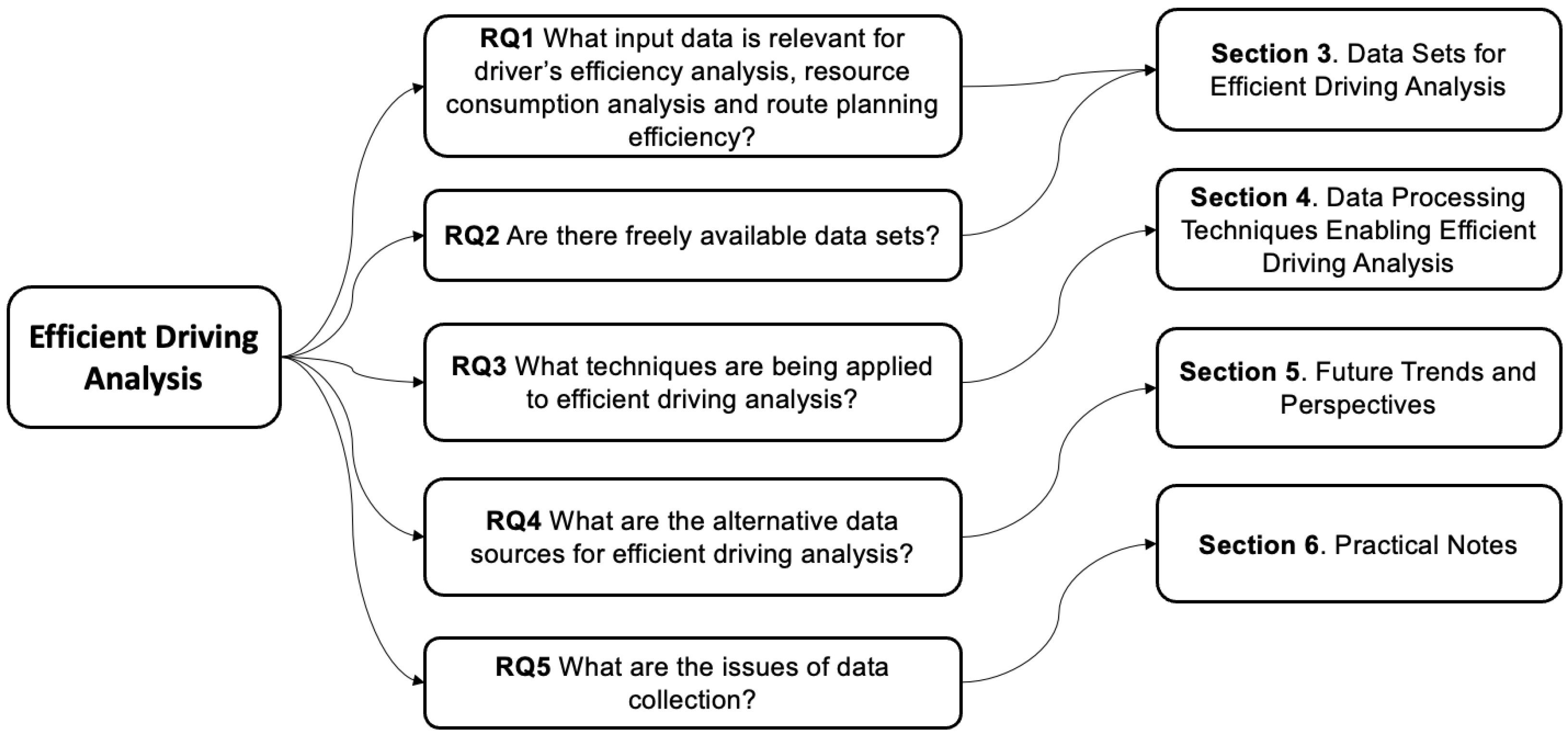
- RQ1:
- Which input data are relevant for efficient vehicle driving analysis?
- RQ2:
- Are there freely available datasets?
- RQ3:
- What techniques are being applied to efficient vehicle driving analysis?
- RQ4:
- What are the alternative data sources for efficient vehicle driving analysis?
- RQ5:
- What are the issues concerning data collection?
3. Datasets for Efficient Vehicle Driving Analysis
3.1. Dataset Availability
3.2. Driver’s Efficiency Analysis Features
3.3. Resource Consumption Efficiency Analysis Features
3.4. Route Efficiency Analysis Features
4. Data Processing Techniques Enabling Efficient Vehicle Driving Analysis
4.1. Optimization Methods
4.2. Machine Learning Methods
4.3. Other Processing Methods
5. Future Trends and Perspectives
5.1. Alternative Data Sources
5.2. Mobility Perspective
6. Practical Notes
6.1. Data Collection Issues
6.2. Online Data Providers
- Real-time weather data: air temperature, atmospheric pressure, and humidity. These data are used to calculate air density. The data source is the OpenWeatherMap free API (available at https://openweathermap.org/, accessed on 10 March 2025).
- Specifications of the electric vehicle: weight and width of the vehicle, drag coefficient, and wheel radius. These data are obtained from the API (available at https://api.auto-data.net/, accessed on 10 March 2025). There are approximately 560 electric vehicles in the sample.
- Route data: obtained sets of location points, which form a pair of geographic latitude and altitude values using the Microsoft Azure Maps API (available at https://azure.microsoft.com/en-us/products/azure-maps, accessed on 10 March 2025).
- Location of traffic lights, road congestion, terrain data, and the type of road surface, obtained from the Routes API by Google (available at https://developers.google.com/maps/documentation/routes, accessed on 10 March 2025) and the OpenStreetMap API (available at URL https://openstreetmap.org/, accessed on 10 March 2025).
7. Conclusions
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Driver Efficiency Analysis Features

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Contextual Group | Features | References | Available in Refs. |
|---|---|---|---|
| battery parameters | - | [79,80,81] | - |
| vehicle description parameters | centroid height, drivetrain, gross mass, motor maximum/ rated speed, motor parameters, vehicle body parameters, vehicle data, vehicle length, vehicle parameters, vehicle type, wheel rolling radius, wheel rotational inertia, wheelbase (front, rear), windward area | [2,13,30,38,39,79,81,82,83,84,85,86,87,88,89] | Direct links: - Upon request: [88] |
| Contextual Group | Features | References | Available in Refs. |
|---|---|---|---|
| acceleration | absolute throttle position, accelerator pedal value, average deceleration, lateral acceleration, throttle position, throttle signal, vertical acceleration | [6,11,22,26,28,32,34,35,37,55,79,80,88,90,91,92,93,94,95,96] | Direct links: [6,11], Upon request: [88,96] |
| air compressor | activation of air compressor, air compressor ON–OFF | [22,55] | Direct links: [22] Upon request: - |
| air parameters | intake air pressure, intake air temperature, manifold air pressure, mass air flow | [6,22,55] | Direct links: [6,22] Upon request: - |
| emissions | - | [37,59,94] | - |
| engine parameters | average rotational engine speed, engine coolant temperatures, engine fuel cut off, engine idle target speed, engine load, engine rotations, engine soaking time, engine speed, engine torque, instant engine, maximum indicated engine torque, minimum indicated engine torque, total number of engine revolutions | [6,22,26,37,55,96] | Direct links: [6,22] Upon request: [96] |
| fuel (power) parameters | fuel consumption, fuel pressure, fuel trim, instantaneous power consumption, long-term fuel trim bank, mean fuel consumption in liters per 100 km, power consumption, remaining fuel | [6,22,26,32,37,55,59,92,94,97] | Direct links: [6,22], Upon request: - |
| interaction | lead vehicle characteristics, preceding vehicle on the same lane, rear vehicle on the same lane, time-to-collision | [13,83,85] | - |
| headway | average space headway, average time headway, headway time | [25,88] | Direct links: - Upon request: [88] |
| location | altitude, current lane position of the vehicle, GPS, lateral coordinate of the front center of the vehicle, lateral deviation, latitude, longitude, longitudinal coordinate of the front center of the vehicle, position in the lane, position on the road, street name or highway name | [6,8,9,13,25,26,28,30,35,59,80,90,93,97,98] | Direct links: [6,8,9,13] Upon request: - |
| performance parameters | brake, clutch operation acknowledge, converter clutch, current gear, current spark timing, driving mode duration, gear selection, gas pedal, images, measurement time, measuring length, OBD system data of a hybrid vehicle, percentage of time in different speed intervals, repeatability of braking/gear shifting/gear upshifting/ stopping, revolutions per minute, steering angle of car, steering wheel angle, steering wheel speed, time of a stop, time of the brake pedal use, time stamps, total distance with using the brake pedal, total distance without using accelerator pedal, travel distances, vehicle time in rolling | [6,13,19,25,28,32,35,37,55,57,59,75,80,89,99,100,101] | Direct links: [6,13,19] Upon request: [75] |
| physical parameters | air drag coefficient, friction torque, flywheel torque, reducer ratio | [22,55,84] | Direct links: [22] Upon request: - |
| road parameters | calculated road gradient, highway, inclination | [29,55,90] | - |
| speed | average velocity, maximum velocity, safety gap speed, speed profiles, speeding, wheel velocity front left-hand, wheel velocity front right-hand, wheel velocity rear left-hand, wheel velocity rear right-hand | [6,11,22,25,26,28,32,35,37,38,55,59,75,80,88,90,92,93,96,97,98,101,102] | Direct links: [6,11,22] Upon request: [75,88,96] |
| vehicle parameters | calculated load value, historical trajectory, length, torque converter speed, transmission oil temperature, vehicle trajectory, vehicle-based measures, vehicle’s surroundings | [18,22,29,36,55,88,98,102,103,104,105] | Direct links: [18,22] Upon request: [88] |
| Contextual Group | Features | References | Available in Refs. |
|---|---|---|---|
| Driver’s characteristics | |||
| driver characteristics | gender, age | [80,101] | - |
| driver’s behavior | - | [2,30,36,39,87,97,106] | Direct links: - Upon request: [106] |
| distraction/fatigue parameters | eye movement, percentages of eye closure, percentages of head nodding, percentages of scaling, percentages of yawning | [76,106,107,108] | Direct links: - Upon request: [106,107] |
| Infrastructure characteristics | |||
| road parameters | intersection features, flat road sections, lane identification number, long uphill road sections, number of lanes, road data, road design, road slope, road structure, road types, rolling resistance coefficient, roundabout specifications, speed limit, structure of the intersection, topographic information, track width (front, rear), trip average road grade, turns, turning radius, type of lines, type of road, up–down road slopes, velocity limit | [27,29,34,38,79,80,83,84,86,88,90,93,95,97,99] | Direct links: - Upon request: [88] |
| infrastructure parameters | recharging points on the path, signal change information | [82,83,97] | - |
| V2X communication | vehicle-to-infrastructure (V2I), vehicle-to-vehicle (V2V) | [48,83] | - |
| Traffic characteristics | |||
| distance parameters | distance, distance between all drivers | [75,102] | Direct links: - Upon request: [75] |
| route data | route deviation | [28,75] | Direct links: - Upon request: [75] |
| traffic data | baseline traffic model, road congestion, traffic measures | [2,27,38,96,97,99,106] | Direct links: - Upon request: [96,106] |
| Environmental characteristics | |||
| environmental data | driving conditions, local wind speed, temperature, weather | [27,30,87,96,99,102] | Direct links: - Upon request: [96] |
| external driver’s environment | - | [109] | - |
Appendix B. Resource Consumption Efficiency Analysis Features
| Contextual Group | Features | References | Available in Refs. |
|---|---|---|---|
| battery parameters | capacity, charge, cooling mechanism, current, diameter of the cylinder, initial capacity, input currents, number of cells and modules, real-time status, state of charge, thermal and health model, traction battery current and voltage, type, voltage | [5,10,14,54,56,110,111,112,113,114,115,116,117,118,119] | Direct links: [5,10,14], Upon request: [116] |
| emissions | - | [120,121,122] | - |
| energy consumption | - | [110,123,124] | - |
| engine parameters | capacity, efficiency, electric motor parameters, model, number of cylinders, power, rated capacity, speed, torque | [52,110,113,115,117,125,126,127] | Direct links: - Upon request: [125] |
| fuel parameters | density, lower heating value | [117] | - |
| gearbox parameters | power loss, efficiency index, gear ratio | [44,115,117] | - |
| physical parameters | drag coefficient, required force and torque at the wheels, rolling friction coefficient, rolling resistance force | [24,113,117,128] | Direct links: [24] Upon request: - |
| vehicle description parameters | load, mass, model, structure, wheel radius, equipped sensors/radars, total mileage, curb weight, vehicle data, frontal area, transmission parameters, powertrain, electric vehicle body shape, electric vehicle year, average vehicle length, full electric vehicle model | [5,10,17,24,40,41,45,47,52,73,111,113,115,117,124,126,127,128,129,130,131,132,133,134,135,136,137,138,139] | Direct links: [5,10,17,24] Upon request: [136,139] |
| Contextual Group | Features | References | Available in Refs. |
|---|---|---|---|
| acceleration | - | [7,10,24,52,110,119,120,123,125,128,134,140,141,142] | Direct links: [7,10,24] Upon request: [125] |
| engine parameters | load rate, revolution, speed, stroke, torque, revolutions per minute | [52,116,117,125,143] | Direct links: - Upon request: [116,125] |
| fuel consumption | power consumption | [14,24,52,120,143,144] | Direct links: [14,24] Upon request: - |
| location | GPS, azimuth, time-stamped location, longitude, latitude | [7,24,41,42,44,45,111,120,123,125,132,140,145] | Direct links: [7,24] Upon request: [125,145] |
| performance parameters | brake usage, deceleration, driving data, frequency of stopping, idling, OBD data, percentage of traction time, state of air conditioning, stop signs, throttle position sensor, turn off time, turn on time, vehicle motion, vehicle telemetry data, vehicle state | [16,42,47,51,58,111,113,117,120,125,141,143,145] | Direct links: [16] Upon request: [58,125,145] |
| physical parameters | aerodynamic force, attractive force, braking torque, final drive ratio, gross weight, nonlinear dynamics of the vehicle, power, torque, traction power, vehicle description parameters, wheel torque | [24,44,115,116,117,128] | Direct links: [24] Upon request: [116] |
| interaction | autonomous vehicles, current preceding vehicle information, data from connected and automated vehicles, average time gap (headway) between vehicles, driving distance, position and velocity of the host vehicle, position and velocity of the preceding vehicle, vehicles in a system, vehicles not registered as an autonomous vehicle | [45,51,52,131,134,146], | - |
| speed | vehicle speed, speed of a link, speed of a rarefaction wave, spot speed, moving speed, speed–time series, velocity prediction | [7,14,24,45,51,52,110,111,113,116,119,120,123,125,134,140,141,144] | Direct links: [7,14,24] Upon request: [116] |
| traffic rules | advisory speed limit | [134] | - |
| Contextual Group | Features | References | Available in Refs. |
|---|---|---|---|
| Trip characteristics | |||
| current vehicle driving information | real-time data of travel status | [42,54] | - |
| elevation and street-level maps | - | [16] | Direct links: [16] Upon request: - |
| historical data | including GPS data | [74,131] | - |
| route parameters | arrival time, distance, route, trip time, vehicle trajectory | [42,44,45,56,117,121,142] | - |
| Traffic characteristics | |||
| density parameters | critical density, density of a link, downstream traffic density, jam density, upper stream traffic density | [134] | - |
| number of vehicles | multitude of vehicle | [33,140] | - |
| traffic data | future traffic flow information, minimum vehicle headway, real-time traffic conditions, traffic information, upstream loop detector location | [5,16,33,45,58,114,129,131,133,134,137,147] | Direct links: [5,16] Upon request: [58,147] |
| traffic laws | - | [47] | - |
| vehicle information | - | [137] | - |
| Contextual Group | Features | References | Available in Refs. |
|---|---|---|---|
| Driver’s characteristics | |||
| driver characteristics | gender, age, occupation, individual-specific characteristics, observation-specific characteristics | [42,113,130,133] | - |
| human driving data | - | [45] | - |
| travel behavior | - | [130] | - |
| Infrastructure characteristics | |||
| GIS data | - | [44,45] | - |
| road parameters | conditions information, control speed at the intersection, force related to road steepness, intersection location, length of road, max and min speed limits, road data, road geometry, road network topology, road roughness, road slope, road speed limit, road terrain profile, roadways, slope angle, speed limits, top speed | [10,17,24,42,45,47,52,113,116,128,129,132,133,134,140,142,146,147] | Direct links: [10,17,24] Upon request: [116,147] |
| safety concerns | - | [47] | - |
| traffic lights parameters | green time interval in signal cycle, signal cycle, signal information, signal phase, timing information from the roadside equipment unit, timing information, yellow time interval in signal cycle | [45,47,131,132,134] | - |
| V2X communication | vehicle-to-infrastructure (V2I), vehicle-to-vehicle (V2V) | [43,45,131,132] | - |
| Environmental characteristics | |||
| weather data | altitude, ambient air density, date-specific environmental attributes, environmental variations, operation conditions, rolling resistance, wind speed | [16,17,33,47,52,58,113,117,130,133,147] | Direct links: [16,17] Upon request: [58,147] |
Appendix C. Route Efficiency Analysis Features
| Contextual Group | Features | References | Available in Refs. |
|---|---|---|---|
| Vehicle technical characteristics | |||
| battery parameters | battery model, max and min battery capacity, state of charge | [20,21,46,148] | Direct links: [20,21] Upon request: - |
| emissions | fuel and CO2 emissions cost per liter | [149] | - |
| physical parameters | coefficient of aerodynamic drag, coefficient of rolling resistance, conversion factor, curb weight, force models, fuel-to-air mass ratio, gravitational constant | [21,149,150] | Direct links: [21] Upon request: - |
| vehicle description parameters | efficiency parameter for diesel engines, electric vehicle model, engineer displacement, engineer friction factor, engineer speed, frontal surface area, heating value of a typical diesel fuel, mass of vehicle and cargo, propulsion motor power, vehicle drive train efficiency, vehicle drivetrain efficiency | [21,23,46,149,151] | Direct links: [21,23] Upon request: - |
| Vehicle dynamics characteristics | |||
| acceleration | - | [46,50] | - |
| angular velocity | - | [50] | - |
| autonomous vehicle status information | - | [152] | - |
| energy consumption | - | [20,153] | Direct links: [20] Upon request: - |
| future data of the driving speed | - | [46] | - |
| OBD data | - | [153] | - |
| Contextual Group | Features | References | Available in Refs. |
|---|---|---|---|
| Trip characteristics | |||
| historical driving data | historical data of average speed | [21,46] | Direct links: [21] Upon request: - |
| trip data | direction, distance traveled, route, spatial graph, time of travel | [20,21,23,49,148,153] | Direct links: [21,23] Upon request: - |
| Traffic characteristics | |||
| surrounding vehicles status information | - | [152] | - |
| traffic-related parameters | dynamic traffic data, real-time road traffic flow, traffic flow, traffic level | [20,21,46,49] | Direct links: [20,21] Upon request: - |
| Driver’s characteristics | |||
| driver profile-related parameters | - | [46] | - |
| Infrastructure characteristics | |||
| network data | - | [23] | Direct links: [23] Upon request: - |
| road-related parameters | road conditions, road gradient, road information, road network | [20,21,46,150,151,152] | Direct links: [20,21] Upon request: - |
| services | grid-to-vehicle, vehicle-to-grid services | [21] | Direct links: [21] Upon request: - |
| speed limits | upper speed limit, lower speed limit | [149] | - |
| traffic light | - | [49] | - |
| Environmental characteristics | |||
| weather-related parameters | air density, environmental parameters, temperature | [21,46,148,149,150] | Direct links: [21] Upon request: - |
Appendix D. Optimization Methods for Efficient Vehicle Driving Analysis
| Reference | Processing Methods | Data Type | Features | Objective |
|---|---|---|---|---|
| Driver’s Efficiency | ||||
| [2] | roll-bench emission tests,
vehicle simulations, regional emission modeling | vehicle data, traffic data, infrastructure data | vehicle parameters,
traffic measures, driving behavior | Perceiving the environment |
| [83] | microscopic fuel consumption models | data from the simulator (MATLAB application) | V2I data, signal change information, vehicle data, lead vehicle data, intersection features | Vehicle Control |
| [29] | multiobjective optimization algorithm, nondominated sorting genetic algorithm | sensor data | length, turning radius, inclination, velocity limit | Perceiving the environment |
| [48] | microscopic fuel model | sensor data, V2X data | V2V/V2I communication, connected vehicles | Perceiving the environment |
| [84] | optimization mathematics model, offline optimization stream | vehicle data | vehicle parameters | Vehicle Control |
| [91] | nondominated sorting multi- objective genetic algorithm, strength Pareto evolutionary algorithm | vehicle data | acceleration value(s) with the associated duration(s), controller gains number of accelerations | Perceiving the environment |
| [30] | comprehensive modal emissions model | driver questionnaire, sensor data | driver characteristics, vehicle characteristics, driving conditions, GPS | Perceiving the environment |
| [154] | grounded group decision making | sensor data | vehicle parameters, driver’s characteristics, energy consumption | Perceiving the environment |
| [79] | nondominated sorting genetic algorithm, multiple objective particle swarm optimization, Pareto envelope-based selection algorithm, strength Pareto evolutio- nary algorithm | sensor data, vehicle data | road characteristics, vehicle acceleration sections, motor parameters, battery parameters | Vehicle Control |
| [92] | multinomial Radau pseudo-spectral method | vehicle sensor data | speed, acceleration, power consumption | Vehicle Control |
| [11] | traffic efficiency optimization, energy consumption optimization, driver comfort optimization | vehicle data | speed, space difference, acceleration | Vehicle Control |
| [85] | genetic algorithm | sensor data | time-to-collision, vehicle data | Vehicle Control |
| [93] | intersection model, vehicle status model | vehicle data, infrastructure data | structure of the intersection, speed limit, safety gap speed, acceleration | Vehicle Control |
| [98] | regression analysis | vehicle data, traffic data, infrastructure data | vehicle’s position, speed, additional relevant information | Perceiving the environment |
| [103] | resequencing and platooning algorithm | vehicle data | vehicle parameters | Vehicle Control |
| Route Efficiency | ||||
| [151] | two-objective hybrid local search algorithm | vehicle data, road data | vehicle parameters, road gradient | Route Planning |
| [21] | data mining, constrained shortest path algorithm, dynamic route planning method, swarm optimization method, multi-objec- tive route planning for solar-power- ed electric vehicles | sensor data, vehicle data, force and motion models | historical driving data, vehicle parameters, battery parameters, road conditions | Perceiving the environment |
| [20] | autoregressive integrated moving average model, non-parametric kernel regression method | vehicle data, traffic data | traffic flow, state of charge, road network, travel time, energy consumption | Route Planning |
| [149] | improved simulated annealing algorithm | vehicle data | vehicle technical parameters, fuel consumption, speed values | Route Planning |
| [49] | dynamic space-time route, velocity- space-time three-dimensional network model | vehicle data, infrastructure data | real-time traffic, traffic lights, vehicle driving status | Route Planning |
| [49] | shortest path algorithms, routing algorithms, temperature-dependent model, graph model, energy consumption predictive model | sensor data | historical data (speed, accelerations, road gradient), vehicle-, road-, traffic-, weather-, driver related parameters, battery model | Route Planning |
| [153] | maximal-frequented-path-graph shortest-path algorithm | vehicle data, infrastructure data | OBD data, energy consumption of road segments | Route Planning |
| [148] | nondominated sorting multi-objec- tive genetic algorithm, Pareto envelope-based selection algorithm, Pareto archived evolution strategy, strength Pareto evolutionary algorithm | vehicle data | state of charge, speed, distance, route, environmental parameters | Vehicle Control |
| [152] | Bezier curve fitted trajectories, artificial potential field method | vehicle data, sensor data | vehicles status information, road information | Route Planning |
| [150] | MATLAB Simulink model | simulation data | aerodynamics, wind speed, topology of roads | Vehicle Control |
| [89] | physical-data-driven distributed predictive control strategy | sensor data | vehicle parameters | Vehicle Control |
| Reference | Processing Methods | Data Type | Features | Objective |
|---|---|---|---|---|
| Resource Consumption Efficiency | ||||
| [41] | route optimization | vehicle data | vehicle parameters, GPS | Vehicle Control |
| [42] | multi-objective optimization | sensor data | route information, vehicle motion, location data, road geometry | Perceiving the environment |
| [43] | velocity, time and distance discreti- sation, nonlinear model predictive control | sensor data, vehicle parameters | V2V communication data | Perceiving the environment |
| [44] | model predictive control, Krylov subspace method, Pontryagin mini- mum principle, dynamic program- ming, numerical optimization techni- ques | sensor data | discrete gear ratio, vehicle trajec- tory, nonlinear vehicle dynamics, GPS data, GIS data | Perceiving the environment |
| [110] | multiple regression analysis | sensor data, calculations, questionnaries | vehicle parameters, battery pack current, voltage, acceleration and energy consumption (calculated) | Vehicle Control |
| [129] | optimal path search algorithm, regression-based approach, physics- based approach, Pontryagin mini- mum principle, dynamic program- ming | traffic data, vehicle data | vehicle parameters, road network topology, real-time traffic condi- tions, real-time data from maps web-services | Route Planning |
| [130] | linear regression,
multi-level models | sensor data, CAN data | drivers’ characteristics, car attribu- tes, date-specific environmental attributes, travel behavior | Perceiving the environment |
| [131] | graph-based model | sensor data, V2X data | connected and automated vehicles parameters, traffic, signal phase and timing information | Route Planning |
| [33] | piecewise method, infinite-dimen- sional optimization, discretised optimization models, temporally based methods and spatiotemporal methods, minimum energy cost with time cost constraint, minimum time cost with energy cost constraint | traffic data, weather, vehicle sensors | environmental and weather condi- tions (wind speed, rolling resistance), traffic | Route Planning |
| [111] | Monte Carlo method | vehicle data | battery parameters, location, speed, azimuth | Vehicle Control |
| [47] | Pontryagin minimum principle, driving mission as an optimal cont- rol problem, dynamic programming | sensor data, topographic information | physical traits, road slopes, speed limits, safety distance, stop signs, traffic lights | Vehicle Control |
| [123] | Pontryagin minimum principle | simulation data | energy consumption, position, speed, acceleration | Vehicle Control |
| [146] | model predictive control with fuzzy-tuned weights | simulation data | road slope information, vehicle position and velocity | Vehicle Control |
| [14] | real-time gang scheduling, dynamic energy optimization, geometric programming | vehicle data | speed, battery charge, power consumption | Vehicle Control |
| [5] | multiagent system modeling | vehicle data, traffic data | vehicle parameters, traffic parameters, charging parameters | Perceiving the environment |
| [112] | sliding mode observer | vehicle data | voltages, input currents | Perceiving the environment |
| [144] | vehicle specific power model | simulation data | speed, fuel consumption | Perceiving the environment |
| [140] | Helbing’s optimal velocity function, car-following model | sensor data | velocity, acceleration, length of road, number of vehicles, position | Perceiving the environment |
| [117] | fuel estimation algorithm | vehicle data | engine parameters, fuel parameters, vehicle parameters | Perceiving the environment |
| [134] | signal control methods, eco-driving algorithms based on the connected vehicles | infrastructure data | intersection parameters, traffic, traffic lights, speed, acceleration | Vehicle Control |
| [133] | Dijkstra’s algorithm, fastest k-route, eco-route, virtual and adaptive traffic light, advisory system | sensor data | vehicle, traffic, roadways, drivers, weather conditions | Vehicle Control |
| [132] | multi-objective optimization, clustering methods, Rint model (modeling method of battery) | simulation data | signal information, speed limit, location, V2I and V2V data, vehicle specifications | Vehicle Control |
| [56] | rule-based power distribution, predictive energy management | vehicle data | driving route, current, charge | Vehicle Control |
| [127] | dynamic programming | experimental data | vehicle parameters, engine parame- ters, motor parameters, transmis- sion parameters, economic cost parameters | Vehicle Control |
| [135] | mutant particle swarm optimization algorithm | sensor data | vehicle model parameters (vehicle dynamic model, tire model, motor model) | Vehicle Control |
| [136] | minimum equivalent fuel consumption model | sensor data | vehicle parameters | Perceiving the environment |
| [124] | decision-making algorithm and an optimization-based trajectory planner | simulation data | vehicle model, energy consumption model | Route Planning |
| [138] | methods for optimal control prob- lem with multiple constraints under the model predictive control | sensor data, experimental data | vehicle physical parameters | Perceiving the environment |
Appendix E. Machine Learning for Efficient Vehicle Driving Analysis
| Reference | Processing Methods | Data Type | Features | Objective |
|---|---|---|---|---|
| Driver’s Efficiency | ||||
| [25] | Neisser’s perceptual cycle | sensor data | headway time, lateral deviation, velocity, steering angle of car | Perceiving the environment |
| [82] | data fusion | sensor data | vehicle parameters, infrastructure parameters | Perceiving the environment |
| [27] | Gazis-Herman-Rothery car- following model, driver model, neurofuzzy modeling | vehicle data, traffic data, weather data | road design, weather, traffic, environment | Vehicle Control |
| [28] | data mining | sensor data, OBD data | speed, acceleration, engine parameters, position, route data | Perceiving the environment |
| [9] | auto-encoder model | sensor data | GPS trajectories | Perceiving the environment |
| [34] | Bayesian network trees, multi-layer perceptron | sensor data | accelerations, brakes, road structure, turns | Route Planning |
| [19] | attention-guided lightweight network | graphic data | images | Vehicle Control |
| [57] | hybrid convolutional-recurrent deep network | graphic data | frontal images | Vehicle Control |
| [36] | support vector machines, decision trees, Bayesian learners, ensemble learners, evolutionary algorithms | vehicle data, driver data, environment data | vehicle-based measures, physiolo- gical-based measures, behavioral- based measures | Perceiving the environment |
| [18] | deep learning, data representation methods, data feature extraction methods, detection and prediction methods | LiDAR data | vehicle’s surroundings | Vehicle Control |
| [15] | object detection in thermal images through style consistency | thermal images | object classes | Vehicle Control |
| [8] | unsupervised deep auto-encoder peer dependency | sensor data | GPS vehicle data, GPS trajectories | Perceiving the environment |
| [6] | random forests, decision trees, support vector machine algorithms | in-vehicle sensor data | speed, engine parameters, fuel consumption | Perceiving the environment |
| [39] | transfer learning, multi-layer- perceptron, ReLU-activation, stochastic gradient descent training | vehicle data, driver’s data | vehicle parameters, driver’s characteristics | Perceiving the environment |
| [80] | support vector machine algorithms | vehicle data, driver’s data | location, gender, battery para- meters, speed, acceleration, deceleration, road types | Perceiving the environment |
| [100] | bioinspired approach-sensitive neural network | graphic data | images | Vehicle Control |
| [101] | random forest, Naive Bayes classifiers | vehicle data | age, acceleration, brake, speed variation | Perceiving the environment |
| [102] | long short-term memory network | vehicle data | speed, distance, historical trajectory, environmental data | Vehicle Control |
| [12] | deep neural network-based reward function for inverse reinforcement learning with efficient model personalization via machine unlearning, ConvLSTM-based RewardNet | vehicle data | vehicle trajectory | Perceiving the environment |
| [22] | supervised learning algorithms | vehicle data | acceleration, engine parameters, fuel consumption parameters, speed parameters | Vehicle Control |
| [13] | clustering analysis | vehicle trajectories | vehicle characteristics, position, location | Perceiving the environment |
| [55] | support vector machines, AdaBoost, random forest | OBD data | acceleration, engine parameters, fuel consumption, speed, vehicle operation parameters | Perceiving the environment |
| [107] | OpenCV, Viola Jones algorithm | camera data | eye closure, yawning, head nodding, scaling | Perceiving the environment |
| [96] | regression, classification, clustering | experimental data, simulation data | vehicle parameters, vehicle operation parameters, weather, traffic signals | Vehicle Control |
| [108] | deep learning model | sensor data | eye closure, open-eye state, yaw- ning, and non-yawning instances | Perceiving the environment |
| [76] | flexible multimodal federated learning method | sensor data, camera, physiological sensor | driver’s characteristics | Perceiving the environment |
| [104] | fuzzy logic estimator based on time-to-collision and time-to-gap | simulation data | vehicle parameters, trajectories | Vehicle Control |
| [105] | deep learning | simulation data | vehicle parameters, trajectories | Vehicle Control |
| Reference | Processing Methods | Data Type | Features | Objective |
|---|---|---|---|---|
| Resource Consumption Efficiency | ||||
| [45] | hybrid model predictive controller, explicit model predictive control method, Bayes Network model | V2X data | location, road profile, limitations, traffic, velocity prediction, traffic lights, full electric, vehicle model, human driving data | Perceiving the environment |
| [54] | machine learning, multiple linear regression method, gradient boosting decision tree algorithm | vehicle data | real-time data of travel and battery status | Vehicle Control |
| [125] | back propagation neural network, support vector regression, random forests | sensor data, OBD data | speed, acceleration, position, torque, revolutions per minute, state of air conditioning | Vehicle Control |
| [143] | support vector machine | sensor data, OBD data | fuel consumption, revolutions per minute, throttle position sensor | Perceiving the environment |
| [17] | deep learning model, artificial neural network, recurrent neural network, long short-term memory | vehicle data, weather data | vehicle parameters, road data, weather characteristics | Perceiving the environment |
| [16] | deep neural networks, linear regression, decision tree | vehicle data, weather data, traffic data | vehicle telemetry data, elevation and street-level maps, weather characteristics, traffic | Route Planning |
| [74] | Markov chain neural network | sensor data | historical GPS data | Vehicle Control |
| [58] | neural network with attention mechanism, deep neural network | vehicle data | driving data, operation conditions, traffic information of road network, vehicle state | Perceiving the environment |
| [10] | support vector machine regression, elastic net, data-driven regression modeling, web-scraping, text- mining techniques | vehicle data | electric vehicle characteristics, battery characteristics, performance specifications | Perceiving the environment |
| [114] | autoregressive network with exogeneous input | vehicle data | state of charge, traffic information | Perceiving the environment |
| [128] | machine learning algorithm | vehicle data | rolling resistance force, force related to road steepness, aerodynamic force, acceleration force, vehicle parameters | Perceiving the environment |
| [126] | deep reinforcement learning | vehicle data | vehicle parameters, electric motor parameters, internal combustion engine parameters | Vehicle Control |
| [53] | deep learning model, recurrent neural network, long short-term memory | vehicle data | state of charge | Vehicle Control |
| [113] | machine learning | vehicle data, driver’s data | battery characteristics, road topology, slope angle, wind speed, vehicle load | Perceiving the environment |
| [115] | deep reinforcement learning | vehicle data | vehicle parameters, engine parameters, battery parameters | Vehicle Control |
| [137] | reinforcement learning | map data, sensor data, V2X, V2V | traffic information, vehicle information | Vehicle Control |
| [52] | support vector machine, random forest, artificial neural network, deep neural network | sensor data, OBD data | vehicle characteristics, driver’s characteristics, weather | Perceiving the environment |
| [51] | reinforcement learning | sensor data | traffic, speed, acceleration, deceleration | Vehicle Control |
| [73] | integration of machine learning and physics-based models | on-board sensors, simulation data, data augmentation | vehicle parameters | Vehicle Control |
| [118] | adaptive network-based fuzzy inference system | vehicle parameters | historical vehicle velocity, accelerations, battery state of charge trajectory | Vehicle Control |
| [142] | deep reinforcement learning | sensor data | rolling resistance, acceleration, travelled distance | Vehicle Control |
| Route Efficiency | ||||
| [50] | sensor fusion techniques (Kalman and complimentary filters) | phone sensors, vehicle data | acceleration, angular velocity | Vehicle Control |
Appendix F. Other Methods for Efficient Vehicle Driving Analysis
| Reference | Processing Methods | Data Type | Features | Objective |
|---|---|---|---|---|
| Driver’s Efficiency | ||||
| [90] | Dempster–Shafer’s theory (cellular automaton) | sensor data | speed, acceleration, position on the road, position in the lane, highway, number of lanes | Perceiving the environment |
| [88] | Nagel–Schreckenberg model, Kerner–Klenov–Wolf model (cellular automaton) | simulation data | speed, acceleration, position, trajectory | Perceiving the environment |
| [99] | visual, numerical analysis (fuzzy logic) | vehicle data, questionnaires | traffic, travel distances, temperatu- re, trip average road grade, local wind speed | Perceiving the environment |
| [97] | fuzzy-logic scoring (mathematical modeling) | sensor data, topographic information | road congestion, recharging points on the path, road slopes, position, speed, instantaneous power consumption | Perceiving the environment |
| [32] | visual, numerical analysis (probability theory) | sensor data | speed, acceleration, driving mode duration, fuel consumption | Perceiving the environment |
| [35] | clustering (simulation) | vehicle data, OBD data | position, speed, acceleration | Perceiving the environment |
| [37] | mean time assessment (simulation) | sensor data, CAN bus data | speed, acceleration, braking, fuel consumption, driving operations | Perceiving the environment |
| [95] | visual, numerical analysis (simulation) | vehicle data | longitudinal and lateral acceleration, type of road | Perceiving the environment |
| [38] | microscopic traffic flow simulation model (simulation) | simulation data | vehicle parameters, baseline traffic model, speed profiles, roundabout specifications | Perceiving the environment |
| [75] | numerical simulation (simulation) | vehicle data, traffic data | distance between all drivers, signals (e.g., gas pedal, brake pedal, speed, steering wheel angle, route deviation, etc.) | Perceiving the environment |
| [81] | digital twin (simulation) | simulation data | vehicle body parameters, engine, drivetrain, battery | Vehicle Control |
| [87] | game theory (statistical analysis) | vehicle data, environmental data | drivers’ characteristics, car attribu- tes, environmental parameters | Perceiving the environment |
| [94] | comprehensive modal emissions model (statistical analysis) | simulation data | fuel consumption, emission of CO and NOx, average deceleration | Vehicle Control |
| [106] | CRITIC weighting model, cluster analysis, analysis of variance (statistical analysis) | simulation data, eye tracker data | eye movement, visual characteris- tics indicators, traffic conditions, driving style | Perceiving the environment |
| [86] | Wilcoxon signed-rank test (statistical analysis) | simulation data | road data, vehicle data, navigation | Perceiving the environment |
| Resource Consumption Efficiency | ||||
| [40] | vehicle simulation model (simulation) | vehicle data | vehicle parameters | Vehicle Control |
| [121] | traffic micro-simulation, vehicle emission model (simulation) | generated data | emissions, trajectory | Vehicle Control |
| [120] | statistical methods (statistical analysis) | sensor data, OBD data | fuel consumption, emissions, moving speed, acceleration, brake usage, position | Perceiving the environment |
| [7] | agglomerative hierarchical clustering combined with an L-term heuristic (statistical analysis) | sensor data, GPS logs | GPS trajectories | Perceiving the environment |
| [116] | mathematical models of energy flow, discharging, charging (statistical analysis) | vehicle data, road data | speed, engine, battery state of charge | Perceiving the environment |
| [145] | vehicle specific power distributions (statistical analysis) | vehicle data, OBD data | location, operation parameters | Vehicle Control |
| [24] | analysis of variance (statistical analysis) | sensor data | acceleration, speed, engine, consumption | Perceiving the environment |
| Route Efficiency | ||||
| [23] | graph theory (simulation) | network data, trip data, vehicle data | nodes, links, scenarios, properties, trip time, properties, energy/ fuel maps | Route Planning |
References
- Wang, Y.; Szeto, W.Y.; Han, K.; Friesz, T.L. Dynamic traffic assignment: A review of the methodological advances for environmentally sustainable road transportation applications. Transp. Res. Part B Methodol. 2018, 111, 370–394. [Google Scholar] [CrossRef]
- Mierlo, J.V.; Maggetto, G.; de Burgwal, E.V.; Gense, R. Driving style and traffic measures—Influence on vehicle emissions and fuel consumption. J. Automob. Eng. 2004, 218, 43–50. [Google Scholar] [CrossRef]
- Wu, Y.; Zhao, X.; Chen, C.; Rong, J.; Zhang, Y. Development and Application of an Ecodriving Support Platform Based on Internet+:Case Study in Beijing Taxicabs. Transp. Res. Rec. J. Transp. Res. Board 2017, 2645, 57–66. [Google Scholar] [CrossRef]
- Khan, K.S.; Kunz, R.; Kleijnen, J.; Antes, G. Five steps to conducting a systematic review. J. R. Soc. Med. 2003, 96, 118–121. [Google Scholar] [CrossRef] [PubMed]
- Ling, S.; Zhu, X.; Wang, Q.; Schonfeld, P. Prediction of Charging Requirements for Electric Vehicles Based on Multiagent Intelligence. J. Adv. Transp. 2022, 2022, 2309376. [Google Scholar] [CrossRef]
- Al-refai, G.; Elmoaqet, H.R.M. In-Vehicle Data for Predicting Road Conditions and Driving Style Using Machine Learning. Appl. Sci. 2022, 12, 8928. [Google Scholar] [CrossRef]
- Breub, M.; Sharifi Boroujerdi, A.M.Y.A. Modelling the Energy Consumption of Driving Styles Based on Clustering of GPS Information. Modelling 2022, 3, 385–399. [Google Scholar] [CrossRef]
- Liu, M.; Yang, K.; Fu, Y.; Wu, D.; Du, W. Driving Maneuver Anomaly Detection based on Deep Auto-Encoder and Geographical Partitioning. ACM Trans. Sen. Netw. 2022, 19, 1–22. [Google Scholar] [CrossRef]
- Wang, P.; Fu, Y.; Zhang, J.; Wang, P.; Zheng, Y.; Aggarwal, C. You Are How You Drive: Peer and Temporal-Aware Representation Learning for Driving Behavior Analysis. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery, Data Mining (KDD ’18), London, UK, 19–23 August 2018; pp. 2457–2466. [Google Scholar] [CrossRef]
- Ahmed, M.; Mao, Z.; Zheng, Y.; Chen, T.; Chen, Z. Electric Vehicle Range Estimation Using Regression Techniques. World Electr. Veh. J. 2022, 13, 105. [Google Scholar] [CrossRef]
- Yang, L.; Han, M.; Fang, S.; Wu, G.; Sheng, H.; Wei, H.; Zhao, X. Differentiated Speed Planning for Connected and Automated Electric Vehicles at Signalized Intersections considering Dynamic Wireless Power Transfer. J. Adv. Transp. 2022, 2022, 5879568. [Google Scholar] [CrossRef]
- Song, Q.; Tan, R.; Wang, J. Towards Efficient Personalized Driver Behavior Modeling with Machine Unlearning. In Proceedings of the Cyber-Physical Systems and Internet of Things Week, San Antonio, TX, USA, 9–12 May 2023; p. 6. [Google Scholar] [CrossRef]
- Chen, S.; Cheng, K.; Yang, J.; Zang, X.; Luo, Q.; Li, J. Driving Behavior Risk Measurement and Cluster Analysis Driven by Vehicle Trajectory Data. Appl. Sci. 2023, 13, 5675. [Google Scholar] [CrossRef]
- Yi, S.; Kim, T.W.; Kim, J.C.; Dutt, N. EASYR: Energy-Efficient Adaptive System Reconfiguration for Dynamic Deadlines in Autonomous Driving on Multicore Processors. ACM Trans. Embed. Comput. Syst. 2022, 22, 1–29. [Google Scholar] [CrossRef]
- Munir, F.; Azam, S.; Rafique, M.A.; Sheri, A.M.; Jeon, M.; Pedrycz, W. Exploring thermal images for object detection in underexposure regions for autonomous driving. Appl. Soft Comput. 2021, 121, 108793. [Google Scholar] [CrossRef]
- Ayman, A.; Sivagnanam, A.; Wilbur, M.; Pugliese, P.; Dubey, A.; Laszka, A. Data-Driven Prediction and Optimization of Energy Use for Transit Fleets of Electric and ICE Vehicles. ACM Trans. Internet Technol. 2021, 22, 1–29. [Google Scholar] [CrossRef]
- Elmi, S.; Tan, K.L. DeepFEC: Energy Consumption Prediction under Real-World Driving Conditions for Smart Cities. In Proceedings of the Web Conference, Ljubljana, Slovenia, 19–23 April 2021. [Google Scholar] [CrossRef]
- Fernes, D.; Silva, A.; Névoa, R.; Simões, C.; Gonzalez, D.; Guevara, M.; Novais, P.; Monteiro, J.; Melo-Pinto, P. Point-cloud based 3D object detection and classification methods for self-driving applications: A survey and taxonomy. Inf. Fusion 2021, 68, 161–191. [Google Scholar] [CrossRef]
- Zhou, Q.; Wang, Y.; Fan, Y.; Wu, X.; Zhang, S.; Kang, B.; Latecki, L.J. AGLNet: Towards real-time semantic segmentation of self-driving images via attention-guided lightweight network. Appl. Soft Comput. 2020, 96, 106682. [Google Scholar] [CrossRef]
- Sarker, A.; Shen, H.; Stankovic, J.A. MORP: Data-Driven Multi-Objective Route Planning and Optimization for Electric Vehicles. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2017, 1, 1–35. [Google Scholar] [CrossRef]
- Bozorgi, A.M.; Farasat, M.; Mahmoud, A. A Time and Energy Efficient Routing Algorithm for Electric Vehicles Based on Historical Driving Data. IEEE Trans. Intell. Veh. 2017, 2, 308–320. [Google Scholar] [CrossRef]
- Khan, M.A.A.; Ali, M.H.; Haque, F.; Habib, M.T. A machine learning approach for driver identification. Indones. J. Electr. Eng. Comput. Sci. 2023, 30, 12. [Google Scholar] [CrossRef]
- Chan, C.; Kuncheria, A.; Macfarlane, J. Simulating the Impact of Dynamic Rerouting on Metropolitan-scale Traffic Systems. ACM Trans. Model. Comput. Simul. 2023, 33, 1–29. [Google Scholar] [CrossRef]
- Skar, A.; Vestergaard, A.; Pour, S.M.; Pettinari, M. Internet-of-Things (IoT) Platform for Road Energy Efficiency Monitoring. Sensors 2023, 23, 2756. [Google Scholar] [CrossRef] [PubMed]
- Ohno, H. Analysis and modeling of human driving behaviors using adaptive cruise control. Appl. Soft Comput. 2001, 1, 237–243. [Google Scholar] [CrossRef]
- Araújo, R.; Igreja, Â; De Castro, R.; Araujo, R.E. Driving Coach: A Smartphone Application to Evaluate Driving Efficient Patterns. In Proceedings of the IEEE Intelligent Vehicles Symposium, Madrid, Spain, 3–7 June 2012; pp. 1005–1010. [Google Scholar] [CrossRef]
- Hoogendoorn, R.G.; Van Arem, B.; Hoogendoorn, S.P. A Neurofuzzy Approach to Modeling Longitudinal Driving Behavior and Driving Task Complexity. Int. J. Veh. Technol. 2012, 2012, 807805. [Google Scholar] [CrossRef]
- Meseguer, J.E.; Calafate, C.T.; Cano, J.C.; Manzoni, P. DrivingStyles: A smartphone application to assess driver behavior. In Proceedings of the IEEE Symposium on Computers and Communications (ISCC), Split, Croatia, 7–10 July 2013; pp. 000535–000540. [Google Scholar] [CrossRef]
- Dovgan, E.; Javorski, M.; Tušar, T.; Gams, M.; Filipič, B. Discovering driving strategies with a multiobjective optimization algorithm. Expert Syst. Appl. 2013, 40, 2687–2695. [Google Scholar] [CrossRef]
- Zheng, F.; Li, J.; van Zuylen, H.; Lu, C. Influence of driver characteristics on emissions and fuel consumption. Transp. Res. Procedia 2017, 27, 624–631. [Google Scholar] [CrossRef]
- Saki, S.; Hagen, T. What drives drivers to start cruising for parking? Modeling the start of the search process. Transp. Res. Part B Methodol. 2024, 188, 103058. [Google Scholar] [CrossRef]
- Chen, C.; Zhao, X.; Yao, Y.; Zhang, Y.; Rong, J.; Liu, X. Driver’s Eco-Driving Behavior Evaluation Modeling Based on Driving Events. J. Adv. Transp. 2018, 2018, 9530470. [Google Scholar] [CrossRef]
- Yi, Z.; Bauer, P.H. Energy Aware Driving: Optimal Electric Vehicle Speed Profiles for Sustainability in Transportation. IEEE Trans. Intell. Transp. Syst. 2019, 20, 1137–1148. [Google Scholar] [CrossRef]
- Rahman, A.A.; Saleem, W.; Iyer, V.V. Driving Behavior Profiling and Prediction in KSA using Smart Phone Sensors and MLAs. IEEE Jordan Int. Jt. Conf. Electr. Eng. Inf. Technol. (JEEIT) 2019, 2019, 34–39. [Google Scholar] [CrossRef]
- Puchalski, A.; Komorska, I. Driving Style Analysis and Classification Using OBD Data of a Hybrid Electric Vehicle. Transp. Probl. 2020, 15, 83–94. [Google Scholar] [CrossRef]
- Elamrani Abou Elassad, Z.; Mousannif, H.; Al Moatassime, H.; Karkouch, A. The application of machine learning techniques for driving behavior analysis: A conceptual framework and a systematic literature review. Eng. Appl. Artif. Intell. 2020, 87, 103312. [Google Scholar] [CrossRef]
- Kilimnik, S.; Mu´slewski, Ł; Kilimnik, W. Assessment and analysis of road transport driver’s behavior in terms of eco-driving. In Proceedings of the 19th International Conference Diagnostics of Machines and Vehicle, Bydgoszcz, Poland, 15–16 December 2021. [Google Scholar] [CrossRef]
- Bahmankhah, B.; Macedo, E.; Fernandes, P.; Coelho, M.C. Micro driving behaviour in different roundabout layouts: Pollutant emissions, vehicular jerk, and traffic conflicts analysis. Transp. Res. Procedia 2022, 62, 501–508. [Google Scholar] [CrossRef]
- Jardin, P.; Moisidis, I.; Kartal, K.; Rinderknecht, S. Adaptive Driving Style Classification through Transfer Learning with Synthetic Oversampling. Vehicles 2022, 4, 1314–1331. [Google Scholar] [CrossRef]
- Shakouri, P.; Ordys, A.; Darnell, P.; Kavanagh, P. Fuel Efficiency by Coasting in the Vehicle. Int. J. Veh. Technol. 2013, 2013, 391650. [Google Scholar] [CrossRef]
- Nasir, M.K.; Md Noor, R.; Kalam, M.A.; Masum, B.M. Reduction of Fuel Consumption and Exhaust Pollutant Using Intelligent Transport Systems. Sci. World J. 2014, 2014, 836375. [Google Scholar] [CrossRef]
- Karmakar, M.; Nandi, A.K. Driving assistance for energy management in electric vehicle. In Proceedings of the IEEE International Conference on Power Electronics, Drives and Energy Systems (PEDES), Trivandrum, India, 14–17 December 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Zhang, S.; Luo, Y.; Wang, J.; Wang, X.; Li, K. Predictive Energy Management Strategy for Fully Electric Vehicles Based on Preceding Vehicle Movement. IEEE Trans. Intell. Transp. Syst. 2017, 18, 3049–3060. [Google Scholar] [CrossRef]
- Guo, L.; Gao, B.; Gao, Y.; Chen, H. Optimal Energy Management for HEVs in Eco-Driving Applications Using Bi-Level MPC. IEEE Trans. Intell. Transp. Syst. 2017, 18, 2153–2162. [Google Scholar] [CrossRef]
- Zhang, S.; Luo, Y.; Li, K.; Li, V. Real-Time Energy-Efficient Control for Fully Electric Vehicles Based on an Explicit Model Predictive Control Method. IEEE Trans. Veh. Technol. 2018, 67, 4693–4701. [Google Scholar] [CrossRef]
- De Cauwer, C.; Verbeke, W.; Van Mierlo, J.; Coosemans, T. A Model for Range Estimation and Energy-Efficient Routing of Electric Vehicles in Real-World Conditions. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2787–2800. [Google Scholar] [CrossRef]
- Shen, D.; Karbowski, D.; Rousseau, A. A Minimum Principle-Based Algorithm for Energy-Efficient Eco-Driving of Electric Vehicles in Various Traffic and Road Conditions. IEEE Trans. Intell. Veh. 2020, 5, 725–737. [Google Scholar] [CrossRef]
- Kundu, S.; Singh, A.; Kundu, S.; Qiao, C.; Hou, Y. Vehicle speed control algorithms for data delivery and eco-driving. In Proceedings of the International Conference on Connected Vehicles and Expo (ICCVE), Vienna, Austria, 3–7 November 2014; pp. 270–271. [Google Scholar] [CrossRef]
- Liu, C.; Wang, J.; Cai, W.; Zhang, Y. An Energy-Efficient Dynamic Route Optimization Algorithm for Connected and Automated Vehicles Using Velocity-Space-Time Networks. IEEE Acces 2019, 7, 108866–108877. [Google Scholar] [CrossRef]
- Gupta, A.; Hu, S.; Zhong, W.; Sadek, A.; Su, L.; Qiao, C. Road Grade Estimation Using Crowd-Sourced Smartphone Data. In Proceedings of the 19th ACM/IEEE International Conference on Information Processing in Sensor Networks (IPSN), Sydney, NSW, Australia, 21–24 April 2020. [Google Scholar] [CrossRef]
- Gu, Z.; Liu, Z.; Wang, Q.; Mao, Q.; Shuai, Z.; Ma, Z. Reinforcement Learning-Based Approach for Minimizing Energy Loss of Driving Platoon Decisions. Sensors 2023, 23, 4176. [Google Scholar] [CrossRef] [PubMed]
- Zhao, D.; Li, H.; Hou, J.; Gong, P.; Zhong, Y.; He, W.; Fu, Z. A Review of the Data-Driven Prediction Method of Vehicle Fuel Consumption. Energies 2023, 16, 5258. [Google Scholar] [CrossRef]
- Zhao, D.; Wang, H.; Liu, Z. Charging-Related State Prediction for Electric Vehicles Using the Deep Learning Model. J. Adv. Transp. 2022, 2022, 4372168. [Google Scholar] [CrossRef]
- Sun, S.; Zhang, J.; Bi, J.; Wang, Y. A Machine Learning Method for Predicting Driving Range of Battery Electric Vehicles. J. Adv. Transp. 2019, 2019, 4109148. [Google Scholar] [CrossRef]
- Kumar, R.; Jain, A. Driving behavior analysis and classification by vehicle OBD data using machine learning. J. Supercomput. 2023, 79, 18800–18819. [Google Scholar] [CrossRef]
- Nguyen, T.; Rauch, Y.; Kriesten, R.; Chrenko, D. Approach for a Global Route-Based Energy Management System for Electric Vehicles with a Hybrid Energy Storage System. Energies 2023, 16, 837. [Google Scholar] [CrossRef]
- Mújica-Vargas, D.; Luna-Alvarez, A.; de Jesús Rubio, J.; Carvajal-Gamez, B. Noise gradient strategy for an enhanced hybrid convolutional-recurrent deep network to control a self-driving vehicle. Appl. Soft Comput. 2020, 92, 106258. [Google Scholar] [CrossRef]
- Li, S.; Zhang, H.; Tan, H.; Zhong, Z.; Jiang, Z. An Attention-Based Model for Travel Energy Consumption of Electric Vehicle with Traffic Information. Adv. Civ. Eng. 2021, 2021, 5571271. [Google Scholar] [CrossRef]
- Prendinger, H.; Oliveira, J.; Catarino, J.; Madruga, M.; Prada, R. iCO2: A Networked Game for Collecting Large-Scale Eco-Driving Behavior Data. IEEE Internet Comput. 2014, 18, 28–35. [Google Scholar] [CrossRef]
- Hollerit, B.; Prendinger, H.; Jain, R.; Fontes, D.; Campos, H.; Damas, H.; Fang, A.; Prada, R.; Cavazza, M. Implementation and Analytics of the Distributed Eco-Driving Simulation iCO2. IEEE Access 2021, 9, 36252–36265. [Google Scholar] [CrossRef]
- Assies, D. Developing a Smart Telemetry Feedback System for Sim Racing. Bachelor’s Thesis, University of Twente, Enschede, The Netherlands, 2021. [Google Scholar]
- Santiago Higuera, M.C. Assessing sim racing software for low-cost driving simulator to road geometric research. Transp. Res. Procedia 2021, 58, 575–582. [Google Scholar] [CrossRef]
- Diaz-Sipiran, B.S.; Cieza-Mostacero, S.E. Influence of a Serious Video Game on the Behavior of Drivers in the Face of Automobile Incidents. Int. J. Adv. Comput. Sci. Appl. 2024, 15, 365. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Z.; Chen, D.; Liu, Q.; Ke, H.; Han, K. Metamobility: Connecting Future Mobility with Metaverse. IEEE Veh. Technol. Mag. 2023, 18, 69–79. [Google Scholar] [CrossRef]
- Anwar, M.S.; Choi, A.; Ahmad, S.; Aurangzeb, K.; Laghari, A.A.; Gadekallu, T.R.; Hines, A. A Moving Metaverse: QoE challenges and standards requirements for immersive media consumption in autonomous vehicles. Appl. Soft Comput. 2024, 159, 111577. [Google Scholar] [CrossRef]
- AlKhoori, F.A.; Khan, L.U.; Guizani, M.; Takac, M. Latency-aware placement of vehicular metaverses using virtual network functions. Simul. Model. Pract. Theory 2024, 133, 102899. [Google Scholar] [CrossRef]
- Zhang, Z.; Zou, Y.; Zhou, T.; Zhang, X.; Xu, Z. Energy Consumption Prediction of Electric Vehicles Based on Digital Twin Technology. World Electr. Veh. J. 2021, 12, 160. [Google Scholar] [CrossRef]
- Yu, G.; Ye, X.; Xia, X.; Chen, Y. Digital twin enabled transition towards the smart electric vehicle charging infrastructure: A review. Sustain. Cities Soc. 2024, 108, 105479. [Google Scholar] [CrossRef]
- Hossain, S.M.M.; Saha, S.K.; Banik, S.; Banik, T. A New Era of Mobility: Exploring Digital Twin Applications in Autonomous Vehicular Systems. In Proceedings of the 2023 IEEE World AI IoT Congress (AIIoT), Seattle, WA, USA, 7–10 June 2023; pp. 493–499. [Google Scholar] [CrossRef]
- Kang, J.; Zhang, J.; Yang, H.; Ye, D.; Hossain, M.S. When Metaverses Meet Vehicle Road Cooperation: Multi-Agent DRL-Based Stackelberg Game for Vehicular Twins Migration. IEEE Internet Things J. 2024, 11, 35928–35941. [Google Scholar] [CrossRef]
- Kong, X.; Bi, J.; Chen, Q.; Shen, G.; Chin, T.; Pau, G. Traffic trajectory generation via conditional Generative Adversarial Networks for transportation Metaverse. Appl. Soft Comput. 2024, 160, 111690. [Google Scholar] [CrossRef]
- Kang, J.; Luo, X.; Nie, J.; Wu, T.; Zhou, H.; Wang, Y.; Niyato, D.; Mao, S.; Xie, S. Blockchain-Based Pseudonym Management for Vehicle Twin Migrations in Vehicular Edge Metaverse. IEEE Internet Things J. 2024, 11, 34254–34269. [Google Scholar] [CrossRef]
- Mousaei, A.; Naderi, Y.; Bayram, I.S. Advancing State of Charge Management in Electric Vehicles with Machine Learning: A Technological Review. IEEE Access 2024, 12, 43255–43283. [Google Scholar] [CrossRef]
- Lin, X.; Zhang, G.; Wei, S. Velocity prediction using Markov Chain combined with driving pattern recognition and applied to Dual-Motor Electric Vehicle energy consumption evaluation. Appl. Soft Comput. 2021, 101, 106998. [Google Scholar] [CrossRef]
- Caruso, G.; Yousefi, M.M.L. From Human to Autonomous Driving: A Method to Identify and Draw Up the Driving Behaviour of Connected Autonomous Vehicles. Vehicles 2022, 4, 1430–1449. [Google Scholar] [CrossRef]
- Yu, S.; Yang, Q.; Wang, J.; Wu, C. FedUSL: A Federated Annotation Method for Driving Fatigue Detection based on Multimodal Sensing Data. ACM Trans. Sens. Netw. 2024. Just Accepted. [Google Scholar] [CrossRef]
- Pashchenko, D. Instrumental Means of Transport Telematics. Electronic Archive of Igor Sikorsky Kyiv Polytechnic Institute. 2020. Available online: https://ela.kpi.ua/handle/123456789/36438 (accessed on 20 February 2025).
- Bortnichuk, N. Instrumental Means of Forming Energy-Efficient Routes for Electric Vehicles. Electronic Archive of Igor Sikorsky Kyiv Polytechnic Institute. 2022. Available online: https://ela.kpi.ua/jspui/handle/123456789/51702 (accessed on 20 February 2025).
- Lin, X.; Lin, Z.; Wei, S. Multi-objective optimized driving strategy of dual-motor EVs using NSGA-II as a case study and comparison of various intelligent algorithms. Appl. Soft Comput. 2021, 111, 107684. [Google Scholar] [CrossRef]
- Wikner, E.; Orbay, R.; Fogelström, S.; Thiringer, T. Gender Aspects in Driving Style and Its Impact on Battery Ageing. Energies 2022, 15, 6791. [Google Scholar] [CrossRef]
- Stabile, P.; Ballo, F.; Previati, G.; Mastinu, G.; Gobbi, M. Eco-Driving Strategy Implementation for Ultra-Efficient Lightweight Electric Vehicles in Realistic Driving Scenarios. Energies 2023, 16, 1394. [Google Scholar] [CrossRef]
- El Faouzi, N.E.; Leung, H.; Kurian, A. Data fusion in intelligent transportation systems: Progress and challenges—A survey. Inf. Fusion 2011, 12, 4–10. [Google Scholar] [CrossRef]
- Rakha, H.A.; Kamalanathsharma, R.K.; Ahn, K. AERIS: Eco-Vehicle Speed Control at Signalized Intersections Using I2V Communication; Technical Report; U.S. Department of Transportation, Research and Innovative Technology Administration: Washington, DC, USA, 2012.
- Lin, C.; Cheng, X. A Traction Control Strategy with an Efficiency Model in a Distributed Driving Electric Vehicle. Sci. World J. 2014, 2014, 261085. [Google Scholar] [CrossRef]
- Allidina, T.; Deka, L.; Paluszczyszyn, D.; Elizondo, D. Selecting Non-Line of Sight Critical Scenarios for Connected Autonomous Vehicle Testing. Software 2022, 1, 244–264. [Google Scholar] [CrossRef]
- Alyamani, H.; Alharbi, N.; Roboey, A.; Kavakli, M. The Impact of Gamifications and Serious Games on Driving under Unfamiliar Traffic Regulations. Appl. Sci. 2023, 13, 3262. [Google Scholar] [CrossRef]
- Ye, M.; Li, P.; Yang, Z.; Liu, Y. Research on Lane Changing Game and Behavioral Decision Making Based on Driving Styles and Micro-Interaction Behaviors. Sensors 2022, 22, 6729. [Google Scholar] [CrossRef] [PubMed]
- Feng, T.; Liu, K.; Liang, C. An Improved Cellular Automata Traffic Flow Model Considering Driving Styles. Sustainability 2023, 15, 952. [Google Scholar] [CrossRef]
- Liang, Y.; Zhao, W.; Wu, J.; Xu, K.; Zhou, X.; Luan, Z.; Wang, C. Energy-efficient driving for distributed electric vehicles considering wheel loss energy: A distributed strategy based on multi-agent architecture. Appl. Energy 2025, 384, 125462. [Google Scholar] [CrossRef]
- Nigro, J.M.; Rombaut, M. IDRES: A rule-based system for driving situation recognition with uncertainty management. Inf. Fusion 2003, 4, 309–317. [Google Scholar] [CrossRef]
- Chakraborty, D.; Vaz, W.; Nandi, A.K. Optimal driving during electric vehicle acceleration using evolutionary algorithms. Appl. Soft Comput. 2015, 2015, 217–235. [Google Scholar] [CrossRef]
- He, H.; Liu, D.; Lu, X.; Xu, J. ECO Driving Control for Intelligent Electric Vehicle with Real-Time Energy. Electronics 2021, 10, 2613. [Google Scholar] [CrossRef]
- Kang, J.; Lin, D. Highly Efficient Traffic Planning for Autonomous Vehicles to Cross Intersections without a Stop. ACM Trans. Intell. Syst. Technol. 2022, 14, 1–24. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, X.; Yu, Q.; Yan, X. Developing a two-stage auditory warning system for safe driving and eco-driving at signalized intersections: A driving simulation study. Accid. Anal. Prev. 2022, 175, 106777. [Google Scholar] [CrossRef]
- Jurecki, R.S.; Stańczyk, T.L.; Ziubiński, M. Analysis of the Structure of Driver Maneuvers in Different Road Conditions. Energies 2022, 15, 7073. [Google Scholar] [CrossRef]
- Ma, Z.; Jørgensen, B.N.; Ma, Z. A Scoping Review of Energy-Efficient Driving Behaviors and Applied State-of-the-Art AI Methods. Energies 2024, 17, 500. [Google Scholar] [CrossRef]
- Frank, R.; Castignani, G.; Schmitz, R.; Engel, T. A novel eco-driving application to reduce energy consumption of electric vehicles. In Proceedings of the International Conference on Connected Vehicles and Expo (ICCVE), Las Vegas, NV, USA, 2–6 December 2013; pp. 283–288. [Google Scholar] [CrossRef]
- Anjum, M.; Shahab, S.; Dimitrakopoulos, G.; Guye, H.F. An In-Vehicle Behaviour-Based Response Model for Traffic Monitoring and Driving Assistance in the Context of Smart Cities. Electronics 2023, 12, 1644. [Google Scholar] [CrossRef]
- Kurani, K.S.; Stillwater, T.; Jones, M.; Caperello, N. Ecodrive I-80: A Large Sample Fuel Economy Feedback Field Test; Research Report UCD-ITS-RR-13-15; Institute of Transportation Studies, University of California: Davis, CA, USA, 2013. [Google Scholar]
- Huang, X.; Qiao, H.; Li, H.; Jiang, Z. Bioinspired approach-sensitive neural network for collision detection in cluttered and dynamic backgrounds. Appl. Soft Comput. 2022, 122, 108782. [Google Scholar] [CrossRef]
- Fern ez, S.; Ito, T.; Cruz-Piris, L.; Marsa-Maestre, I. Fuzzy Ontology-Based System for Driver Behavior Classification. Sensors 2022, 22, 7954. [Google Scholar] [CrossRef] [PubMed]
- Li, P.; Pei, X.; Chen, Z.; Zhou, X.; Xu, J. Human-like motion planning of autonomous vehicle based on probabilistic trajectory prediction. Appl. Soft Comput. 2022, 118, 108499. [Google Scholar] [CrossRef]
- Gao, J.; Tian, J.; Gong, L.; Zhang, Y. An Innovative Cooperative Driving Strategy for Signal-Free Intersection Navigation with CAV Platoons. Appl. Sci. 2024, 14, 3498. [Google Scholar] [CrossRef]
- Sharma, O.; Sahoo, N.C.; Puhan, N.B. Dynamic Planning of Optimally Safe Lane-change Trajectory for Autonomous Driving on Multi-lane Highways Using a Fuzzy Logic–based Collision Estimator. ACM J. Auton. Transp. Syst. 2024, 1, 1–50. [Google Scholar] [CrossRef]
- Zohdinasab, T.; Riccio, V.; Tonella, P. Focused Test Generation for Autonomous Driving Systems. ACM Trans. Softw. Eng. Methodol. 2024, 33, 1–32. [Google Scholar] [CrossRef]
- Wang, H.; Ding, X.; Wang, C. Risk Assessment of Distracted Driving Behavior Based on Visual Stability Coefficient. J. Adv. Transp. 2023, 2023, 2111532. [Google Scholar] [CrossRef]
- Koch, K.; Maritsch, M.; Weenen, E.V.; Feuerriegel, S.; Pfäffli, M.; Fleisch, E.; Weinmann, W.; Wortmann, F. Leveraging driver vehicle and environment interaction: Machine learning using driver monitoring cameras to detect drunk driving. In Proceedings of the Conference on Human Factors in Computing Systems, Hamburg, Germany, 23–28 April 2023. [Google Scholar] [CrossRef]
- Gupta, B.B.; Gaurav, A.; Tai Chui, K.; Arya, V. Deep Learning Model for Driver Behavior Detection in Cyber-Physical System-Based Intelligent Transport Systems. IEEE Access 2024, 12, 62268–62278. [Google Scholar] [CrossRef]
- Golestan, K.; Soua, R.; Karray, F.; Kamel, M.S. Situation awareness within the context of connected cars: A comprehensive review and recent trends. Inf. Fusion 2016, 29, 68–83. [Google Scholar] [CrossRef]
- Hu, K.; Wu, J.; Liu, M. Exploring the Energy Efficiency of Electric Vehicles with Driving Behavioral Data from a Field Test and Questionnaire. Hindawi J. Adv. Transp. 2018, 2018, 1074817. [Google Scholar] [CrossRef]
- Lu, Z.; Zhang, Q.; Yuan, Y.; Tong, W. Optimal Driving Range for Battery Electric Vehicles Based on Modeling Users’ Driving and Charging Behavior. J. Adv. Transp. 2020, 2020, 8813137. [Google Scholar] [CrossRef]
- Wang, Q.; Jiang, J.; Gao, T.; Ren, S. State of Charge Estimation of Li-Ion Battery Based on Adaptive Sliding Mode Observer. Sensors 2022, 22, 7678. [Google Scholar] [CrossRef]
- Mediouni, H.; Ezzouhri, A.; Charouh, Z.; El Harouri, K.; El Hani, S.; Ghogho, M. Energy Consumption Prediction and Analysis for Electric Vehicles: A Hybrid Approach. Energies 2022, 15, 6490. [Google Scholar] [CrossRef]
- Lin, W.; Zhao, H.; Zhang, B.; Wang, Y.; Xiao, Y.; Xu, K.; Zhao, R. Predictive Energy Management Strategy for Range-Extended Electric Vehicles Based on ITS Information and Start–stop Optimization with Vehicle Velocity Forecast. Energies 2022, 15, 7774. [Google Scholar] [CrossRef]
- Yan, F.; Wang, J.; Du, C.; Hua, M. Multi-Objective Energy Management Strategy for Hybrid Electric Vehicles Based on TD3 with Non-Parametric Reward Function. Energies 2023, 16, 74. [Google Scholar] [CrossRef]
- Pielecha, I.; Cieslik, W.; Szwajca, F. Energy Flow and Electric Drive Mode Efficiency Evaluation of Different Generations of Hybrid Vehicles under Diversified Urban Traffic Conditions. Energies 2023, 16, 794. [Google Scholar] [CrossRef]
- Imed, B. Implementation of a Fuel Estimation Algorithm Using Approximated Computing. J. Low Power Electron. Appl. 2022, 12, 17. [Google Scholar] [CrossRef]
- Lin, B.; Wei, C.; Feng, F.; Liu, T. A Predictive Energy Management Strategy for Heavy Hybrid Electric Vehicles Based on Adaptive Network-Based Fuzzy Inference System-Optimized Time Horizon. Energies 2024, 17, 2288. [Google Scholar] [CrossRef]
- Zhu, L.; Tao, F.; Fu, Z.; Li, M.; Deng, G. Safety-involved co-optimization of speed trajectory and energy management for fuel cell-battery electric vehicle in car-following scenarios. Complex Intell. Syst. 2025, 11, 89. [Google Scholar] [CrossRef]
- Fafoutellis, P.; Mantouka, E.G.; Vlahogianni, E.I. Eco-Driving and Its Impacts on Fuel Efficiency: An Overview of Technologies and Data-Driven Methods. Sustainability 2021, 13, 226. [Google Scholar] [CrossRef]
- Xu, Z.; Jiang, T.; Zheng, N. Developing and analyzing eco-driving strategies for on-road emission reduction in urban transport systems—A VR-enabled digital-twin approach. Chemosphere 2022, 305, 135372. [Google Scholar] [CrossRef]
- Biewer, S.; Finkbeiner, B.; Hermanns, H.; Köhl, M.A.; Schnitzer, Y.; Schwenger, M. On the road with RTLola. Int. J. Softw. Tools Technol. Transf. 2023, 25, 205–218. [Google Scholar] [CrossRef]
- Ngo, C.; Solano-Araque, E.; Aguado-Rojas, M.; Sciarretta, A.; Chen, B.; El Baghdadi, M. Real-time eco-driving for connected electric vehicles. IFAC-PapersOnLine 2021, 54, 126–131. [Google Scholar] [CrossRef]
- Joa, E.; Lee, H.; Choi, E.Y.; Borrelli, F. Energy-Efficient Lane Changes Planning and Control for Connected Autonomous Vehicles on Urban Roads. arXiv 2023, arXiv:2304.08576. [Google Scholar] [CrossRef]
- Yao, Y.; Zhao, X.; Liu, C.; Rong, J.; Zhang, Y.; Dong, Z.; Su, Y. Vehicle Fuel Consumption Prediction Method Based on Driving Behavior Data Collected from Smartphones. J. Adv. Transp. 2020, 2020, 9263605. [Google Scholar] [CrossRef]
- Li, T.; Cui, W.; Cui, N. Soft Actor-Critic Algorithm-Based Energy Management Strategy for Plug-In Hybrid Electric Vehicle. World Electr. Veh. J. 2022, 13, 193. [Google Scholar] [CrossRef]
- Li, Y.; Yang, R.; Wu, Z.; Huang, W.; Xu, M. An Economic Velocity Planning Strategy Based on Driving Style and Improved Dynamic Programming for a Hybrid Electric Truck. World Electr. Veh. J. 2023, 14, 194. [Google Scholar] [CrossRef]
- NaitMalek, Y.; Najib, M.; Lahlou, A.; Bakhouya, M.; Gaber, J.; Essaaidi, M. A Hybrid Approach for State-of-Charge Forecasting in Battery-Powered Electric Vehicles. Sustainability 2022, 14, 9993. [Google Scholar] [CrossRef]
- Thibault, L.; De Nunzio, G.; Sciarretta, A. A Unified Approach for Electric Vehicles Range Maximization via Eco-Routing, Eco-Driving, and Energy Consumption Prediction. IEEE Trans. Intell. Veh. 2018, 3, 463–475. [Google Scholar] [CrossRef]
- Li, D.; Li, C.; Miwa, T.; Morikawa, T. An Exploration of Factors Affecting Drivers’ Daily Fuel Consumption Efficiencies Considering Multi-Level Random Effects. Sustainability 2019, 11, 393. [Google Scholar] [CrossRef]
- Wei, Z.; Hao, P.; Barth, M.J. Developing an Adaptive Strategy for Connected Eco-Driving under Uncertain Traffic Condition. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019; Volume 2019, pp. 2066–2071. [Google Scholar] [CrossRef]
- Wang, S.; Yu, P.; Shi, D.; Yu, C.; Yin, C. Research on eco-driving optimization of hybrid electric vehicle queue considering the driving style. J. Clean. Prod. 2022, 343, 130985. [Google Scholar] [CrossRef]
- Younes, M. Towards Green Driving: A Review of Efficient Driving Techniques. World Electr. Veh. J. 2022, 13, 103. [Google Scholar] [CrossRef]
- Sun, P.; Nam, D.; Jayakrishnan, R.; Jin, W. An eco-driving algorithm based on vehicle to infrastructure (V2I) communications for signalized intersections. Transp. Res. Part Emerg. Technol. 2022, 144, 103876. [Google Scholar] [CrossRef]
- Qiao, Y.; Chen, X.; Liu, Z. Trajectory Tracking Coordinated Control of 4WID-4WIS Electric Vehicle Considering Energy Consumption Economy Based on Pose Sensors. Sensors 2023, 23, 5496. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Q.; Tian, S. Energy Consumption Prediction and Control Algorithm for Hybrid Electric Vehicles Based on an Equivalent Minimum Fuel Consumption Model. Sustainability 2023, 15, 9394. [Google Scholar] [CrossRef]
- Zhang, Z.; Ding, H.; Guo, K.; Zhang, N. Eco-Driving Cruise Control for 4WIMD-EVs Based on Receding Horizon Reinforcement Learning. Electronics 2023, 12, 1350. [Google Scholar] [CrossRef]
- Hong, J.; Luo, X.; Wu, H.; Na, X.; Chu, H.; Gao, B.; Chen, H. Energy-Saving Driving Assistance System Integrated with Predictive Cruise Control for Electric Vehicles. IEEE Trans. Intell. Veh. 2024, 9, 4518–4528. [Google Scholar] [CrossRef]
- Pla, B.; Bares, P.; Pey, V.; Rodríguez, L.S.; Armas, O. Speed Advisor for Fuel Consumption Minimisation Under Real Driving Conditions. Appl. Sci. 2025, 15, 654. [Google Scholar] [CrossRef]
- Han, J.; Wang, X.; Shi, H.; Wang, B.; Wang, G.; Chen, L.; Wang, Q. Research on the Impacts of Vehicle Type on Car-Following Behavior, Fuel Consumption and Exhaust Emission in the V2X Environment. Sustainability 2022, 14, 15231. [Google Scholar] [CrossRef]
- Liu, C.; Liu, Y. Energy Management Strategy for Plug-In Hybrid Electric Vehicles Based on Driving Condition Recognition: A Review. Electronics 2022, 11, 342. [Google Scholar] [CrossRef]
- Chaudhary, R.; Sharma, N.K.; Kala, R.; Singh, S.N. Deep Reinforcement Learning-Based Speed Predictor for Distributionally Robust Eco-Driving. IEEE Access 2025, 13, 13904–13918. [Google Scholar] [CrossRef]
- Abukhalil, T.; AlMahafzah, H.; Alksasbeh, M.; Alqaralleh, B.A. Fuel Consumption Using OBD-II and Support Vector Machine Model. J. Robot. 2020, 2020, 9450178. [Google Scholar] [CrossRef]
- Zhang, L.; Zhang, T.; Peng, K.; Zhao, X.; Xu, Z. Can Autonomous Vehicles Save Fuel? Findings from Field Experiments. J. Adv. Transp. 2022, 2022, 2631692. [Google Scholar] [CrossRef]
- Peng, F.; Zhang, Y.; Song, G.; Huang, J.; Zhai, Z.; Yu, L. Evaluation of Real-World Fuel Consumption of Hybrid-Electric Passenger Car Based on Speed-Specific Vehicle Power Distributions. J. Adv. Transp. 2023, 2023, 9016510. [Google Scholar] [CrossRef]
- Bakibillah, A.S.M.; Kamal, M.A.S.; Tan, C.P.; Hayakawa, T.; Imura, J.I. Fuzzy-tuned model predictive control for dynamic eco-driving on hilly roads. Appl. Soft Comput. 2021, 99, 106875. [Google Scholar] [CrossRef]
- Yan, L.; Gao, Y.; Guo, J.; Deng, G. A deep learning method for assessment of ecological potential in traffic environments. Comput. Ind. Eng. 2025, 202, 110958. [Google Scholar] [CrossRef]
- Khanra, M.; Ni, A.K. Optimal driving based trip planning of electric vehicles using evolutionary algorithms: A driving assistance system. Appl. Soft Comput. 2020, 93, 106361. [Google Scholar] [CrossRef]
- Feng, Y.; Zhang, R.Q.; Jia, G. Vehicle Routing Problems with Fuel Consumption and Stochastic Travel Speeds. Math. Probl. Eng. 2017, 2017, 6329203. [Google Scholar] [CrossRef]
- Aboelsoud, K.; Diab, H.Y.; Abdelsalam, M.; Hegaze, M.M. An Efficient GPS Algorithm for Maximizing Electric Vehicle Range. Appl. Sci. 2024, 14, 4858. [Google Scholar] [CrossRef]
- Rao, W.; Liu, F.; Wang, S. An Efficient Two-Objective Hybrid Local Search Algorithm for Solving the Fuel Consumption Vehicle Routing Problem. Appl. Comput. Intell. Soft Comput. 2016, 2016, 3713918. [Google Scholar] [CrossRef]
- Yang, W.; Li, C.; Zhou, Y. Path Planning Method for Autonomous Vehicles Based on Risk Assessment. World Electr. Veh. J. 2022, 13, 234. [Google Scholar] [CrossRef]
- Li, Y.; Kotwal, P.; Wang, P.; Xie, Y.; Shekhar, S.; Northrop, W. Physics-guided Energy-efficient Path Selection Using On-board Diagnostics Data. ACM/IMS Trans. Data Sci. 2020, 1, 1–28. [Google Scholar] [CrossRef]
- Muslim, N.H.; Keyvanfar, A.; Shafaghat, A.; Abdullahi, M.A.M.; Khorami, M. Green Driver: Travel Behaviors Revisited on Fuel Saving and Less Emission. Sustainability 2018, 10, 325. [Google Scholar] [CrossRef]


| Refs. | Provider | Format | Attributes | Collection Method | Link |
|---|---|---|---|---|---|
| [5] | U.S. Department of Transportation, National Household Travel Survey | CSV, DBF, SAS V2.1, SPSS V2.1 | Vehicle parameters,
traffic parameters, charging parameters, trip parameters, and driver parameters | Statistical | https://cutt.ly/ewQehHxn (accessed on 10 March 2025) |
| [6] | SisInfLab Research Group, Polytechnic University of Bari | CSV | Speed parameters,
acceleration parameters, engine parameters, and fuel consumption | OBD-II Phone sensors | https://cutt.ly/3wQejm8h (accessed on 10 March 2025) |
| [7,8,9] | Microsoft Research T-Drive Project | TXT | GPS parameters | GPS sensor | https://cutt.ly/AwQrf2FI (accessed on 10 March 2025) |
| [10] | Collected by the authors | XLSX, Jupter Notebook | Electric vehicles’ specifications | Web-scraping and text-mining | https://cutt.ly/TwQrheFl (accessed on 10 March 2025) |
| [11,12,13] | U.S. Department of Transportation, Federal Highway Administration, Next Generation SIMulation Program | CSV, XML, PDF, Video, API, JSON, and TXT | Vehicle trajectory data | Network of synchronized digital video cameras | https://cutt.ly/YwQrj3xo (accessed on 10 March 2025) |
| [14] | comma.ai | Video and Numpy arrays | Route parameters,
speed parameters, acceleration parameters, and GPS parameters | Comma EONs, road-facing camera, 9-axis IMU, CAN bus, and GNSS | https://cutt.ly/LwQrWNhW (accessed on 10 March 2025) |
| [15] | Teledyne FLIR LLC | TIFF, JPEG, JSON, and Video | Labeled categories:
person, bike, car, motorcycle, bus, train, truck, traffic light, fire hydrant, street sign, dog, skateboard, stroller, scooter, and other | Thermal camera and visible camera | https://cutt.ly/zwQrECoW (accessed on 10 March 2025) |
| [16] | Department of Energy, Office of Energy Efficiency and Renewable Energy | CSV and DBF | Traffic parameters,
vehicle parameters driver parameters, GPS parameters, fuel consumption, and weather | Telematics kit | https://cutt.ly/hwQrRkEU (accessed on 10 March 2025) |
| [17] | U.S. Department of
Transportation, Intelligent Transportation Systems | CSV and JSON | Trip parameters, vehicle parameters, GPS parameters, and weather | Board vehicle devices and roadside units | https://cutt.ly/uwQrTGoX (accessed on 10 March 2025) |
| University of Michigan | XLSX | Vehicle parameters,
GPS parameters, and fuel parameters | OBD-II | https://cutt.ly/CwQrT8Gz (accessed on 10 March 2025) | |
| [18] | Autonomous Vision Group | JPEG | Topics: stereo, flow,
sceneflow, depth, odometry, object, tracking, road, semantics, and raw data | Visual (Stereo) camera, LiDAR, and GNSS | https://cutt.ly/DwQrOeyL (accessed on 10 March 2025) |
| Motional | JSON and JPEG | Vehicle parameters and map extension data | LiDAR and CAN bus | https://cutt.ly/DwQrPejh (accessed on 10 March 2025) | |
| Waymo LLC | Vector maps, JPEG, and TFRecord | Perception dataset and motion dataset | LiDAR | https://cutt.ly/kwQrP65R (accessed on 10 March 2025) | |
| Audi | JSON and JPEG | Labeled categories:
vehicles, pedestrians, road infrastructure, nature, sky, buildings, and rain | Visual camera, LiDAR, and CAN bus | https://cutt.ly/swQrA5Es (accessed on 10 March 2025) | |
| [19] | University of Cambridge | JPEG and Video | Labeled categories:
moving objects, road, ceiling, and fixed objects | Camera | https://cutt.ly/1wQrSMAl (accessed on 10 March 2025) |
| Daimler AG,
TU Darmstadt, MPI Informatics, 4TU Dresden | JPEG, Video | Labeled groups:
flat, human, vehicle, construction, object, nature, and sky | Camera, CAN bus, and GNSS | https://cutt.ly/BwQrDWPU (accessed on 10 March 2025) | |
| [20] | South Carolina Department of Transportation | GIS data, CSV, PDF, and TXT | Traffic parameters and road parameters | Traffic cameras | https://cutt.ly/OwQrGDLg (accessed on 10 March 2025) |
| [21] | University of Sydney, Australian Centre for Field Robotics | CSV | Vehicle parameters and trip parameters | OBD-II and GNSS | https://cutt.ly/GwQrH3vJ (accessed on 10 March 2025) |
| [22] | Kia motors corporation, South Korea | CSV | Engine features,
fuel features, and transmission features | OBD-II | https://cutt.ly/PwQrJfUV (accessed on 10 March 2025) |
| [23] | European Commission, Joint Research Centre | TIFF and OVR | Trip parameters and map data | Satellite | https://cutt.ly/DwQtFx9t (accessed on 10 March 2025) |
| [24] | Technical University of Denmark | CSV | Vehicle sensor data, road condition parameters, and driving data | AutoPi telematics unit, and CAN bus | https://cutt.ly/4wTE9zt6 (accessed on 10 March 2025) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Husyeva, I.I.; Navas-Delgado, I.; García-Nieto, J. Data-Driven Approaches for Efficient Vehicle Driving Analysis: A Survey. J. Sens. Actuator Netw. 2025, 14, 52. https://doi.org/10.3390/jsan14030052
Husyeva II, Navas-Delgado I, García-Nieto J. Data-Driven Approaches for Efficient Vehicle Driving Analysis: A Survey. Journal of Sensor and Actuator Networks. 2025; 14(3):52. https://doi.org/10.3390/jsan14030052
Chicago/Turabian StyleHusyeva, Iryna I., Ismael Navas-Delgado, and José García-Nieto. 2025. "Data-Driven Approaches for Efficient Vehicle Driving Analysis: A Survey" Journal of Sensor and Actuator Networks 14, no. 3: 52. https://doi.org/10.3390/jsan14030052
APA StyleHusyeva, I. I., Navas-Delgado, I., & García-Nieto, J. (2025). Data-Driven Approaches for Efficient Vehicle Driving Analysis: A Survey. Journal of Sensor and Actuator Networks, 14(3), 52. https://doi.org/10.3390/jsan14030052