

Urban Air Mobility, Personal Drones, and the Safety of Occupants—A Comprehensive Review




Abstract
1. Introduction
2. Urban Air Mobility
3. Personal Drones—Insight

| Company | Category | Picture | Technical Specification | ||||
|---|---|---|---|---|---|---|---|
| Occupants | Range /Flight Time | MTOW [kg] | Max. Speed [km/h] | Frame Material | |||
| Jetson One [26] | Multirotor/ Wingless |  | 1 | 20 min | 181 | 102 | Aluminum |
| Hover Scorpion [27] | Multirotor/ Wingless/ Hoverbikes |  | 1 | 21 km | 218 | 69 | Carbon fibers |
| Air One [28] | Multirotor |  | 2 | 60 min | 970 | 250 | Metal and composite |
| EHang AAV [29] | Multirotor/ Wingless |  | 2 | 35 km | 360 | 130 | Carbon fibers |
| Passenger Drone (ASTRO) [30] | Multirotor/ Wingless |  | 2 | 20–25 min | 360 | 70 | Carbon fibers |
| Whisper [31] | Multirotor/ Wingless |  | 2 | 30 min | N/A | N/A | N/A |
| Volocopter VC200 [16] | Multirotor/ Wingless |  | 2 | 27 min | 450 | 100 | Carbon fibers |
| Airbus Vahana [32] | Tilt Rotor/ Vectored Thrust |  | 1 | 50 km | 815 | 219 | N/A |
| Opener Blackfly [32] | Tilt Rotor/ Vectored Thrust |  | 1 | 40 km | 246 | 129 | Carbon fibers |
| Wisk Aero Cora [33] | Tilt Rotor/ Vectored Thrust |  | 2 | 20 min | N/A | 160 | N/A |
| Joby eVTOL [17] | Tilt Rotor/ Vectored Thrust |  | N/A | 322 km | 1815 | 322 | Composite |
| Kittyhawk [19] | Tilt Rotor/ Vectored Thrust |  | 1 | 160 km | N/A | 354 | Composite |
| Archer [34] | Tilt Rotor/ Vectored Thrust |  | 1 + 4 | 96 km | 3175 | 150 | N/A |
| Zuri 2.0 [35] | Tilt Rotor/ Vectored Thrust |  | 1 + 4 | 700 km | N/A | 300 | Carbon fibers |
| Lilium [18] | Tilt Duct/ Vectored Thrust |  | 2 | 60 min | 640 | 300 | N/A |
| Prosperity I [36] | Lift and Cruise |  | 1 + 3 | 250 km | N/A | 200 | N/A |
4. Occupant Safety in a Personal Drone
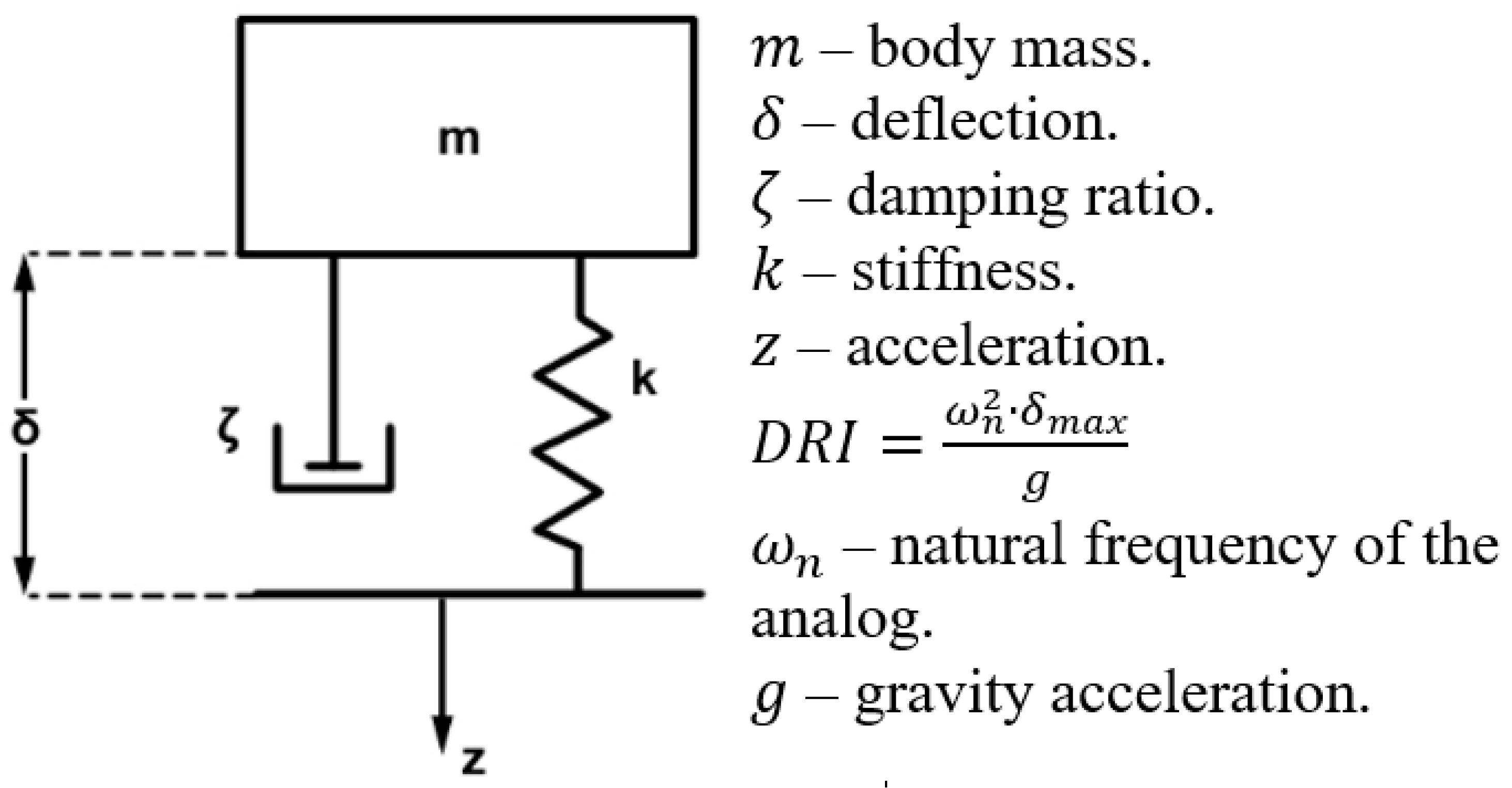
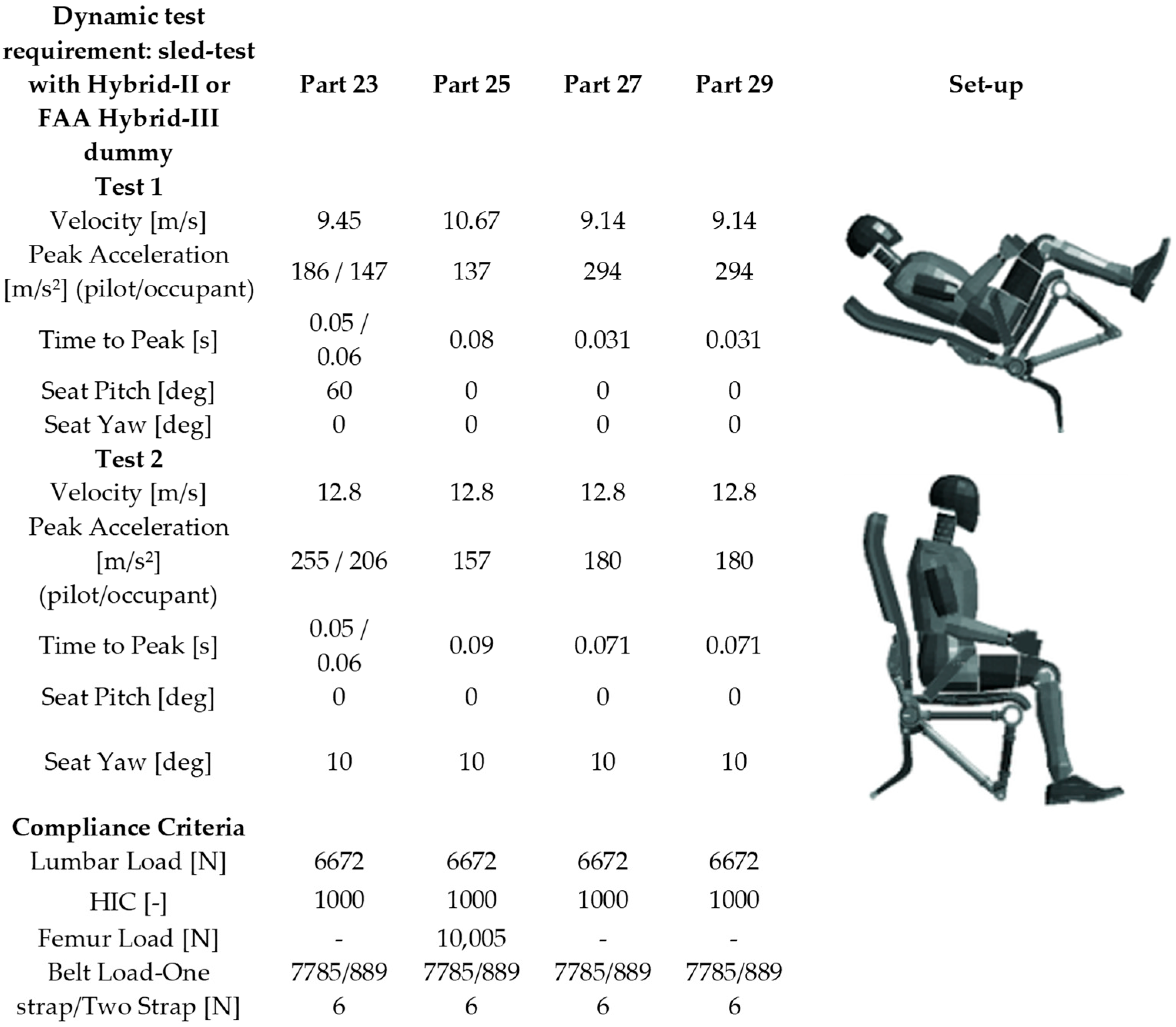
4.1. Passenger Injury Criteria
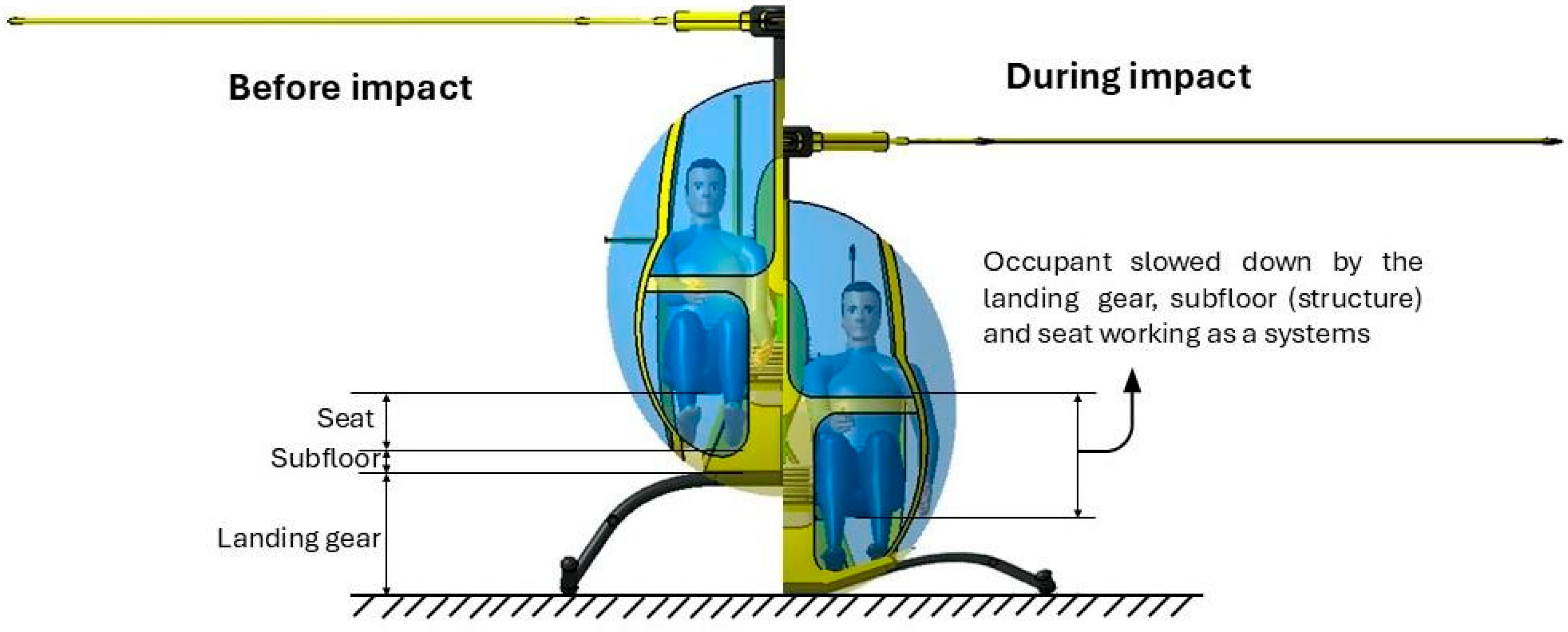
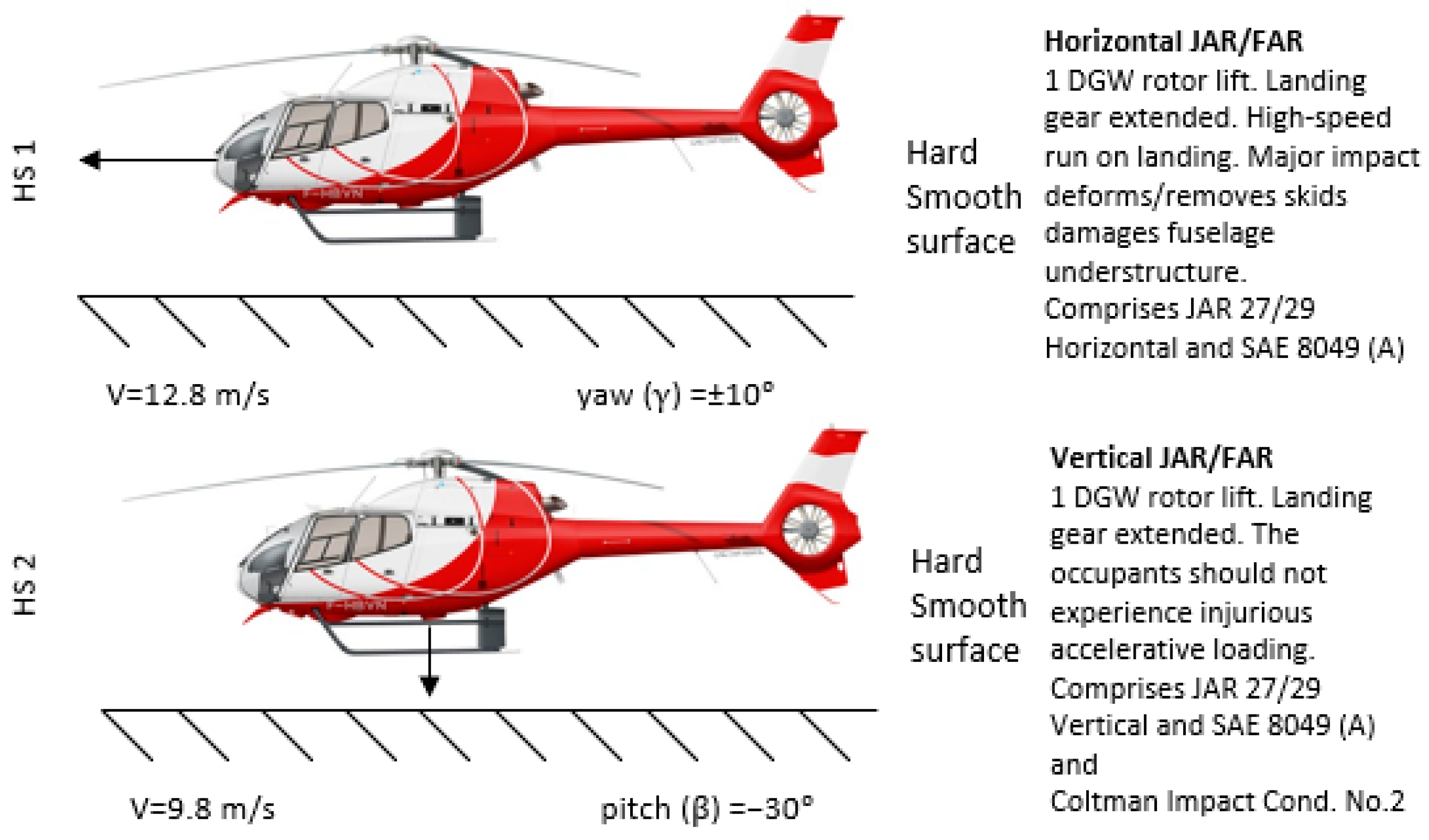
4.2. Integrated Safety Approach
- -
- to improve the survivability in the cockpit and cabin;
- -
- to minimize the risk of injuries;
- -
- to analyze crash data in order to define typical crash scenarios, usable for simulations;
- -
- the definition of injury criteria, the development of a simulation tool;
- -
- the integration of safety concepts developed in the automotive industry;
- -
- the definition of an advanced safety system concept by analyzing interacting safety features for new projects and for retrofit;
- -
- recommendations for airworthiness standards.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CAD | Computer-Aided Design |
| CAE | Computer-Aided Engineering |
| EASA | European Union Aviation Safety Agency |
| EC | European Commission |
| eVTOL | Electric Vertical Take-off and Landing Aircraft |
| FAA | Federal Aviation Administration |
| FEA | Finite Element Analysis |
| FEM | Finite Element Method |
| FHA | Functional Hazard Assessment |
| HIC | Head Injury Criterion |
| MTOW | Maximum Take-off Weight |
| MB | Multibody |
| NASA | National Aeronautics and Space Administration |
| UAM | Urban Air Mobility |
| THUMS | Total Human Model for Safety |
References
- Traffic Congestion Ranking|TomTom Traffic Index. Available online: https://www.tomtom.com/en_gb/traffic-index/ranking/ (accessed on 13 July 2022).
- Air Quality in Europe 2021—European Environment Agency. Available online: https://www.eea.europa.eu/publications/air-quality-in-europe-2021/ (accessed on 13 July 2022).
- 2024 INRIX Global Traffic Scorecard. Available online: https://inrix.com/scorecard/ (accessed on 25 March 2025).
- Kawabata, M.; Shen, Q. Job Accessibility as an Indicator of Auto-Oriented Urban Structure: A Comparison of Boston and Los Angeles with Tokyo. Environ. Plan. B Plan. Des. 2006, 33, 115–130. [Google Scholar] [CrossRef]
- McKinsey & Company. Study on the Societal Acceptance of Urban Air Mobility in Europe; European Union Aviation Safety Agency: Cologne, Germany, 2021; Volume 162. [Google Scholar]
- Concept of Operations. 2020. Available online: https://nari.arc.nasa.gov/sites/default/files/attachments/UAM_ConOps_v1.0.pdf (accessed on 13 July 2022).
- Urban Air Mobility|Airbus. 2021. Available online: https://www.airbus.com/en/innovation/zero-emission/urban-air-mobility (accessed on 13 July 2022).
- Uber Air|Uber Elevate. Available online: https://www.uber.com/in/en/elevate/ (accessed on 13 July 2022).
- Rimjha, M.; Hotle, S.; Trani, A.; Hinze, N. Commuter demand estimation and feasibility assessment for Urban Air Mobility in Northern California. Transp. Res. Part A Policy Pract. 2021, 148, 506–524. [Google Scholar] [CrossRef]
- Cho, S.-H.; Kim, M. Assessment of the environmental impact and policy responses for urban air mobility: A case study of Seoul metropolitan area. J. Clean. Prod. 2022, 360, 132139. [Google Scholar] [CrossRef]
- Fu, M.; Rothfeld, R.; Antoniou, C. Exploring Preferences for Transportation Modes in an Urban Air Mobility Environment: Munich Case Study. Transp. Res. Rec. J. Transp. Res. Board 2019, 2673, 427–442. [Google Scholar] [CrossRef]
- Garrow, L.A.; German, B.; Mokhtarian, P.; Glodek, J.; Lewe, J.-H.; Laughlin, T.; Mavris, D.; Mane, M.; Crossley, W.; Becker, K.; et al. A Survey to Model Demand for eVTOL Urban Air Trips and Competition with Autonomous Ground Vehicles. In Proceedings of the AIAA Aviat 2019 Forum, Dallas, TX, USA, 17–21 June 2019; American Institute of Aeronautics and Astronautics: Reston, VA, USA. [Google Scholar] [CrossRef]
- Kleinbekman, I.C.; Mitici, M.; Wei, P. Rolling-Horizon Electric Vertical Takeoff and Landing Arrival Scheduling for On-Demand Urban Air Mobility. J. Aerosp. Inf. Syst. 2020, 17, 150–159. [Google Scholar] [CrossRef]
- Al Haddad, C.; Chaniotakis, E.; Straubinger, A.; Plötner, K.; Antoniou, C. Factors affecting the adoption and use of urban air mobility. Transp. Res. Part A Policy Pract. 2020, 132, 696–712. [Google Scholar] [CrossRef]
- Second Publication of Means of Compliance with the Special Condition VTOL, Issue 2. 2022. Available online: https://www.easa.europa.eu/downloads/136697/en (accessed on 14 July 2022).
- Velocopter, Volocopter. Available online: https://www.volocopter.com/ (accessed on 15 July 2022).
- Joby Aviation|Joby. Available online: https://www.jobyaviation.com/ (accessed on 15 July 2022).
- Lilium Air Mobility—Lilium. Available online: https://lilium.com/ (accessed on 15 July 2022).
- Kittyhawk, Kittyhawk. Available online: https://www.kittyhawk.aero (accessed on 15 July 2022).
- Reiche, C.; Goyal, R.; Cohen, A.; Serrao, J.; Kimmel, S.; Fernando, C.; Shaheen, S. Urban Air Mobility Market Study; Transportation Sustainability Research Center: Berkeley, CA, USA, 2018. [Google Scholar] [CrossRef]
- eVTOL Classifications. Available online: https://evtol.news/classifications (accessed on 16 July 2022).
- Bacchini, A.; Cestino, E. Electric VTOL Configurations Comparison. Aerospace 2019, 6, 26. [Google Scholar] [CrossRef]
- Bahr, M.; McKay, M.; Niemiec, R.; Gandhi, F. Handling Qualities Assessment of Large Variable-RPM Multi-Rotor Aircraft for Urban Air Mobility. In Proceedings of the Vertical Flight Society 76th Annual Forum & Technology Display, Online, 5–8 October 2020. [Google Scholar]
- Bruehl, R.; Fricke, H.; Schultz, M. Air taxi flight performance modeling and application. In Proceedings of the USA/Europe ATM R&D Seminar, Online, 27–30 June 2021. [Google Scholar]
- Nathen, D.P.; Bardenhagen, D.A.; Strohmayer, D.A.; Miller, R.; Grimshaw, D.S.; Taylor, D.J. Architectural performance assessment of an electric vertical take-off and landing (e-VTOL) aircraft based on a ducted vectored thrust concept, 35. Available online: https://www.semanticscholar.org/paper/Architectural-performance-assessment-of-an-electric-Nathen-Strohmayer/96113870bb6176a0818bf09330cb3125db44ed21 (accessed on 1 April 2025).
- Jetson—Personal Electric Aerial Vehicle. Available online: https://www.jetsonaero.com/ (accessed on 16 July 2022).
- Home|HOVERSURF, HOVER. Available online: https://www.hoversurf.com (accessed on 16 July 2022).
- AIR ONE, AIREV. Available online: https://www.airev.aero/air-one (accessed on 16 July 2022).
- EHang|UAM—Passenger Autonomous Aerial Vehicle (AAV). Available online: https://www.ehang.com/ehangaav/ (accessed on 16 July 2022).
- Available online: https://flyastro.com/ (accessed on 16 July 2022).
- Whisper. Available online: https://www.rondscarres.fr/whisper/ (accessed on 16 July 2022).
- Vahana|Airbus. 2021. Available online: https://www.airbus.com/en/innovation/low-carbon-aviation/urban-air-mobility/cityairbus-nextgen/vahana (accessed on 1 April 2025).
- Discover the Future of Urban Air Mobility, Wisk. Available online: https://wisk.aero/aircraft/ (accessed on 16 July 2022).
- Archer—Home. Available online: https://www.archer.com/ (accessed on 16 July 2022).
- Zuri—The Personal Aircraft with Vertical Takeoff. Available online: https://zuri.com/ (accessed on 16 July 2022).
- Products|Autoflight. Available online: https://www.autoflight.com/en/products/ (accessed on 16 July 2022).
- Shamiyeh, M.; Rothfeld, R.; Hornung, M. A PERFORMANCE BENCHMARK OF RECENT PERSONAL AIR VEHICLE CONCEPTS FOR URBAN AIR MOBILITY. In Proceedings of the 31st Congress of the International Council of the Aeronautical Sciences, Belo Horizonte, Brazil, 9–14 September 2018; p. 12. [Google Scholar]
- UBER Elevate, Uber Air Vehicle Requirements and Missions. 2018. Available online: https://s3.amazonaws.com/uber-static/elevate/Summary+Mission+and+Requirements.pdf (accessed on 10 September 2022).
- Patterson, M.D.; Antcliff, K.R.; Kohlman, L.W.; Proposed, A. Approach to Studying Urban Air Mobility Missions Including an Initial Exploration of Mission Requirements. In Annual Forum and Technology Display; Langley Research Center: Phoenix, AZ, USA, 2018. Available online: https://ntrs.nasa.gov/citations/20190000991 (accessed on 18 July 2022).
- Wasson, K.; Neogi, N.; Graydon, M.; Maddalon, J.; Miner, P.; McCormick, G.F. Functional Hazard Assessment for the eVTOL Aircraft Supporting Urban Air Mobility (UAM) Applications: Exploratory Demonstrations. 2022. Available online: https://ntrs.nasa.gov/citations/20210024234 (accessed on 14 November 2022).
- Olivares, G. Integrated Occupant Safety for Urban Air Transport Emergency Landing Applications. In Proceedings of the 8th Biennial Autonomous VTOL Technical Meeting & 6th Annual Electric VTOL Symposium, Mesa, AZ, USA, 28 January–1 February 2019. [Google Scholar]
- Accidents by Flight Phase|Airbus Accident Statistics. Available online: https://accidentstats.airbus.com/accidents-by-flight-phase/ (accessed on 1 April 2025).
- 14 CFR Part 27—Airworthiness Standards: Normal Category Rotorcraft. Available online: https://www.ecfr.gov/current/title-14/chapter-I/subchapter-C/part-27 (accessed on 31 July 2022).
- CS-27 Small Rotorcraft, EASA. Available online: https://www.easa.europa.eu/certification-specifications/cs-27-small-rotorcraft (accessed on 31 July 2022).
- Vieira, H.; Douglas, J. Occupant, Injury Assessment in an Emergency Landing Condition for a Vertical Takeoff and Landing Aircraft. Mater’s Thesis, Wichita State University, Wichita, KS, USA, 2020. Available online: https://soar.wichita.edu/handle/10057/19759 (accessed on 16 July 2022).
- Special Condition for VTOL and Means of Compliance, EASA. Available online: https://www.easa.europa.eu/en/document-library/product-certification-consultations/special-condition-vtol (accessed on 11 September 2022).
- Shanahan, D.F. Basic Principles of Helicopter Crashworthiness, ARMY AEROMEDICAL RESEARCH LAB FORT RUCKER AL. 1993. Available online: https://apps.dtic.mil/sti/citations/ADA267099 (accessed on 11 September 2022).
- Dzialak, P.; Ptak, M.; Karliński, J.; Iluk, A. Injury biomechanics of a mining machine operator. In Proceedings of the 2014 IRCOBI Conference Proceedings—International Research Council on the Biomechanics of Injury, Berlin, Germany, 10–12 September 2014; Volume 11. [Google Scholar]
- Fuchs, Y.; Jackson, K. Vertical Drop Testing and Analysis of the WASP Helicopter Skid Gear. J. Am. Helicopter Soc. 2011, 56, 12005. [Google Scholar] [CrossRef]
- Jackson, K.; Fasanella, E.; Boitnott, R.; Lyle, K. Full-Scale Crash Test and Finite Element Simulation of a Composite Prototype Helicopter; Langley Research Center: Hampton, VA, USA, 2003. [Google Scholar]
- Ambrósio, J. Crashworthiness: Energy Management and Occupant Protection; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar] [CrossRef]
- Dayong, H.; Zhang, X. Full-scale crash test and FEM simulation of a crashworthy helicopter seat. Hangkong Dongli Xuebao J. Aerosp. Power. 2012, 27, 395–400. [Google Scholar] [CrossRef]
- Pellettiere, J.; Crocco, J.; Jackson, K. Rotorcraft full spectrum crashworthiness and occupant injury requirements. Annu. Forum Proc. AHS Int. 2011, 2, 919–930. [Google Scholar]
- Gerardo, O. Urban Air Transport Crashworthinss-Integrated Safety Approach. In: Atlantic City, 2019; p. 18. Available online: https://www.researchgate.net/publication/337532836_Urban_Air_Transport_Crashworthiness_-_Integrated_Safety_Approach (accessed on 1 April 2025).
- Guida, M.; Lamanna, G.; Marulo, F.; Caputo, F. Review on the design of an aircraft crashworthy passenger seat. Prog. Aerosp. Sci. 2022, 129, 100785. [Google Scholar] [CrossRef]
- Iluk, Estimation of spine injury risk as a function of bulletproof vest mass in case of Under Body Blast load. In Proceedings of the 2014 IRCOBI Conference Proceedings-International Research Council on the Biomechanics of Injury, Berlin, Germany, 10–12 September 2014. [CrossRef]
- Brinkley, J.W.; Shaffer, J.T. Dynamic Simulation Techniques for the Design of Escape Systems: Current Applications and Future Air Force Requirements, Air Force Aerospace Medical Research Lab Wright-Patterson Afb Oh. 1971. Available online: https://apps.dtic.mil/sti/citations/AD0740439 (accessed on 12 September 2022).
- Aircraft Crash Survival Design Guide. Volume 2. Aircraft Design Crash Impact Conditions and Human Tolerance. Available online: https://apps.dtic.mil/sti/citations/ADA218435 (accessed on 12 November 2022).
- Jackson, K.; Fuchs, Y.; Kellas, S. Overview of the National Aeronautics and Space Administration Subsonic Rotary Wing Aeronautics Research Program in Rotorcraft Crashworthiness. J. Aerosp. Eng. J AEROSP ENG. 2009, 22, 229–239. [Google Scholar] [CrossRef]
- Somers, J.; Gohmert, D.; Brinkley, J. Application of the Brinkley Dynamic Response Criterion to Spacecraft Transient Dynamic Events; NASA Tech. Memo; National Aeronautics and Space Administration: Washington, DC, USA, 2013.
- Desjardins, S. Establishing Lumbar Injury Tolerance For Energy Absorbing Seats Criteria And Testing Limitations. In Proceedings of the 64th AHS Annual Forum, Montreal, QC, Canada, 29 April–1 May 2008. [Google Scholar]
- Eiband, A.M. Human Tolerance to Rapidly Applied Accelerations: A Summary of the Literature. 1959. Available online: https://ntrs.nasa.gov/citations/19980228043 (accessed on 12 November 2022).
- Gadd, C.W. Use of a Weighted-Impulse Criterion for Estimating Injury Hazard; SAE International: Warrendale, PA, USA, 1966. [Google Scholar] [CrossRef]
- Putnam, J.; Littell, J. Evaluation of Impact Energy Attenuators and Composite Material Designs of a UAM VTOL Concept Vehicle. In: Philadelphia, PA. 2019. Available online: https://ntrs.nasa.gov/citations/20200002462 (accessed on 16 July 2022).
- Tay, Y.Y.; Cai, Y.; Lankarani, H. Lumbar Load Estimation for a MADYMO FAA Hybrid-III Scalable Dummy. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Houston, TX, USA, 13–19 November 2015. [Google Scholar] [CrossRef]
- Fasanella, E. Full Spectrum Crashworthiness Criteria for Rotorcraft. 2011. Available online: https://www.academia.edu/20844050/Full_Spectrum_Crashworthiness_Criteria_for_Rotorcraft (accessed on 13 November 2022).
- Laananen, D.H. Crashworthiness analysis of commuter aircraft seats and restraint systems. J. Safety Res. 1991, 22, 83–95. [Google Scholar] [CrossRef]
- Pellettiere, J.; Desjardins, S.; Tulloch, J. Development of lumbar injury tolerance criteria. Proc. Annu. SAFE Symp. Surviv. Flight Equip. Assoc. 2013, 187–193. Available online: https://www.researchgate.net/publication/289777780_Development_of_lumbar_injury_tolerance_criteria (accessed on 13 November 2022).
- Safety Analysis of Children Transported on Bicycle-Mounted Seat During Traffic Accidents: International Journal of Crashworthiness: Vol 25, No 6. Available online: https://www.tandfonline.com/doi/abs/10.1080/13588265.2019.1626967?journalCode=tcrs20 (accessed on 13 November 2022).
- Lankarani, H. Development of a Component Head Injury Criteria (HIC) Tester for Aircraft Seat Certification: Phase 1., National Inst. for Aviation Research, Wichita, KS.; Federal Aviation Administration, Washington, DC. Office of Aviation. 2002. Available online: https://ntrl.ntis.gov/NTRL/dashboard/searchResults/titleDetail/PB2003107811.xhtml (accessed on 14 November 2022).
- Lamanna, G.; Vanacore, A.; Guida, M.; Caputo, F.; Marulo, F.; Vitolo, B.; Cicatiello, S. Development of a Head Injury Criteria-Compliant Aircraft Seat by Design of Experiments. Aerospace 2019, 6, 95. [Google Scholar] [CrossRef]
- OlivaresUrbanPresWeb.pdf. Available online: https://www.fire.tc.faa.gov/2019Conference/files/Opening_Session/OlivaresUrbanPresWeb.pdf (accessed on 5 September 2022).
- DeWeese, R.L.; Moorcroft, D.M. Assessment of Head and Neck Injury Potential During Aircraft Longitudinal Impacts; FAA Southern Regional Office of Aerospace Medicine: Oklahoma City, OK, USA, 2017. [Google Scholar]
- Eppinger, R.; Kleinberger, M.; Kuppa, S.; Saul, R.; Sun, E. Development of Improved Injury Criteria for the Assessment of Advanced Automotive Restraint Systems. 1998. Available online: https://rosap.ntl.bts.gov/view/dot/14737 (accessed on 24 November 2022).
- Olivares, G. Hybrid II and Federal Aviation Administration Hybrid III Anthropomorphic Test Dummy Dynamic Evaluation Test Series; National Technical Information Services (NTIS): Springfield, VA, USA, 2018.
- Happee, R.; Janssen, A.J.; Fraterman, E.; Monster, J.W. Application of MADYMO Occupant Models in LS-DYNA/MADYMO Coupling. In: 2003, p. 8. Available online: https://www.dynamore.de/en/downloads/papers/03-conference (accessed on 1 April 2025).
- Hessmer, U. HeliSafe®—EU Research into Occupant Safety in Helicopter Crashes. Air Space Eur. 2001, 3, 225–227. [Google Scholar] [CrossRef]
- Blundell, M.; Vadlamudi, S.; Zhang, Y. Use of Madymo for Simulations of Helicopter Crash Scenarios within the HeliSafe TA Project. In Proceedings of the 6th European Madymo Users meeting, Berlin, Germany, 29–30 May 2007; Volume 32. [Google Scholar]
- Caputo, F.; Lamanna, G.; Perfetto, D.; Chiariello, A.; Di Caprio, F.; Di Palma, L. Experimental and Numerical Crashworthiness Study of a Full-Scale Composite Fuselage Section. AIAA J. 2021, 59, 700–718. [Google Scholar] [CrossRef]
- Perfetto, D.; De Luca, A.; Lamanna, G.; Chiariello, A.; Di Caprio, F.; Di Palma, L.; Caputo, F. Drop test simulation and validation of a full composite fuselage section of a regional aircraft. Procedia Struct. Integr. 2018, 12, 380–391. [Google Scholar] [CrossRef]
- Fu, J.; Liu, Q.; Ma, Y.; Zhang, Z. A comparative study on energy absorption of flat sides and corner elements in CFRP square tube under axial compression. Thin Walled Struct. 2021, 166, 108080. [Google Scholar] [CrossRef]
- Liu, X.; Belkassem, B.; Jonet, A.; Lecompte, D.; Van Hemelrijck, D.; Pintelon, R.; Pyl, L. Experimental investigation of energy absorption behaviour of circular carbon/epoxy composite tubes under quasi-static and dynamic crush loading. Compos. Struct. 2019, 227, 111266. [Google Scholar] [CrossRef]
- Feraboli, P.; Wade, B.; Deleo, F.; Rassaian, M. Crush energy absorption of composite channel section specimens. Compos. Part Appl. Sci. Manuf. 2009, 40, 1248–1256. [Google Scholar] [CrossRef]
- Hamada, H.; Coppola, J.C.; Hull, D.; Maekawa, Z.; Sato, H. Comparison of energy absorption of carbon/epoxy and carbon/PEEK composite tubes. Composites 1992, 23, 245–252. [Google Scholar] [CrossRef]
- Desjardins, S. The Evolution of Energy Absorption Systems for Crashworthy Helicopter Seats. J. Am. Helicopter Soc. 2006, 51, 150–163. [Google Scholar] [CrossRef]
- Rotman, I.; Rosenberg, G. External Airbag Protection System for Helicopters, US5992794A, 1999. Available online: https://patents.google.com/patent/US5992794A/en (accessed on 21 November 2022).
- Bolukbasi, A. Rotorcraft Active Crash Protection Systems. National Specialists’ Meeting on Rotorcraft Structures and Survivability, Williamsburg, VA, USA, 27–29 October 2009. [Google Scholar]
- Littell, J.D. Challenges in Vehicle Safety and Occupant Protection for Autonomous electric Vertical Takeoff and Landing (eVTOL) Vehicles. In 2019 AIAA/IEEE Electric Aircraft Technologies Symposium (EATS); IEEE: New York, NY, USA, 2019; pp. 1–16. [Google Scholar] [CrossRef]
- Jackson, K.E. Advances in Rotorcraft Crashworthiness: Trends Leading to Improved Survivability: The 37th Alexander A. Nikolsky Honorary Lecture; Vertical Flight Society: Fairfax, VA, USA, 2018. [Google Scholar] [CrossRef]
- Putnam, J.J.; Littell, M.C.; Reaves, N.W. Gardner, Development and Analysis of Energy Absorbing Subfloor Concepts to Improve eVTOL Crashworthiness, in: Fort Worth, TX. Available online: https://ntrs.nasa.gov/citations/20220005247 (accessed on 20 November 2022).
- Paweł, K.; Ptak, M.; Fernandes, F.; Chybowski, L.; Wilhelm, J.; de Sousa, R.A. Materials Development and Testing of Advanced Cork Composite Sandwiches for Energy-Absorbing Structures. Materials 2019, 12, 697. [Google Scholar] [CrossRef]
- Cork in Aerospace: Cultivation to Application; Gürgen, S., Ed.; ESOGU Press: Eskişehir, Turkey, 2023; ISBN 978-605-9975-83-4. [Google Scholar]
- Fernandesa, F.A.O.; Kaczyński, P.; de Sousa, R.J.A.; Ptak, M.; Wilhelm, J. Cork Composites for Structural Applications. In Green Sustainable Process for Chemical and Environmental Engineering and Science Natural Materials Based Green Composites 1: Plant Fibers; Elsevier: Amsterdam, The Netherlands, 2023; pp. 29–51. ISBN 978-0-323-95167-8. [Google Scholar]
- Kaczynski, P.; Ptak, M.; Wilhelm, J.; Fernandes, F.A.O.; de Sousa, R.J.A. High-Energy Impact Testing of Agglomerated Cork at Extremely Low and High Temperatures. Int. J. Impact Eng. 2019, 126, 109–116. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}



| 2024 Impact Rank (2023 Rank) | Urban Area | Country | 2024 Delay per Driver (hours) | 2023 Delay per Driver (hours) | Change from 2023 |
|---|---|---|---|---|---|
| 1 (6) | Istanbul | TUR | 105 | 91 | 15% |
| 2 (1) | New York City, NY | USA | 102 | 101 | 1% |
| 3 (5) | Chicago, IL | USA | 102 | 96 | 6% |
| 4 (2) | Mexico City | MEX | 97 | 96 | 1% |
| 5 (3) | London | GBR | 101 | 99 | 2% |
| 6 (4) | Paris | FRA | 97 | 97 | 0% |
| 7 (10) | Jakarta | IDN | 89 | 65 | 37% |
| 8 (7) | Los Angeles, CA | USA | 88 | 89 | −1% |
| 9 (9) | Cape Town | ZAF | 94 | 83 | 13% |
| 10 (12) | Brisbane | AUS | 84 | 74 | 14% |
| 11 (14) | Bangkok | THA | 74 | 63 | 17% |
| 12 (8) | Boston MA | USA | 79 | 88 | −10% |
| 13 (13) | Philadelphia, PA | USA | 77 | 69 | 12% |
| 14 (11) | Miami FL | USA | 74 | 70 | 6% |
| 15 (16) | Dublin | IRL | 81 | 72 | 13% |
| 16 (15) | Rome | ITA | 71 | 69 | 3% |
| 17 (19) | Houston, TX | USA | 66 | 62 | 6% |
| 18 (20) | Brussels | BEL | 74 | 68 | 9% |
| 19 (21) | Atlanta, GA | USA | 65 | 61 | 7% |
| 20 (28) | Warsaw | POL | 70 | 61 | 15% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhyriakov, D.; Ptak, M.; Sawicki, M. Urban Air Mobility, Personal Drones, and the Safety of Occupants—A Comprehensive Review. J. Sens. Actuator Netw. 2025, 14, 39. https://doi.org/10.3390/jsan14020039
Zhyriakov D, Ptak M, Sawicki M. Urban Air Mobility, Personal Drones, and the Safety of Occupants—A Comprehensive Review. Journal of Sensor and Actuator Networks. 2025; 14(2):39. https://doi.org/10.3390/jsan14020039
Chicago/Turabian StyleZhyriakov, Dmytro, Mariusz Ptak, and Marek Sawicki. 2025. "Urban Air Mobility, Personal Drones, and the Safety of Occupants—A Comprehensive Review" Journal of Sensor and Actuator Networks 14, no. 2: 39. https://doi.org/10.3390/jsan14020039
APA StyleZhyriakov, D., Ptak, M., & Sawicki, M. (2025). Urban Air Mobility, Personal Drones, and the Safety of Occupants—A Comprehensive Review. Journal of Sensor and Actuator Networks, 14(2), 39. https://doi.org/10.3390/jsan14020039