Application of Remote Sensing Data for Evaluation of Rockfall Potential within a Quarry Slope

 ,
, 
Abstract
1. Introduction
Case Study: The Treviscoe Rockfall
2. Materials and Methods
2.1. Close-Range Remote Sensing Survey
2.2. Long-Range Remote Sensing Survey
2.3. Geo-Mechanical Analysis
2.4. GIS Geospatial Analysis
2.5. Numerical Modelling
3. Results
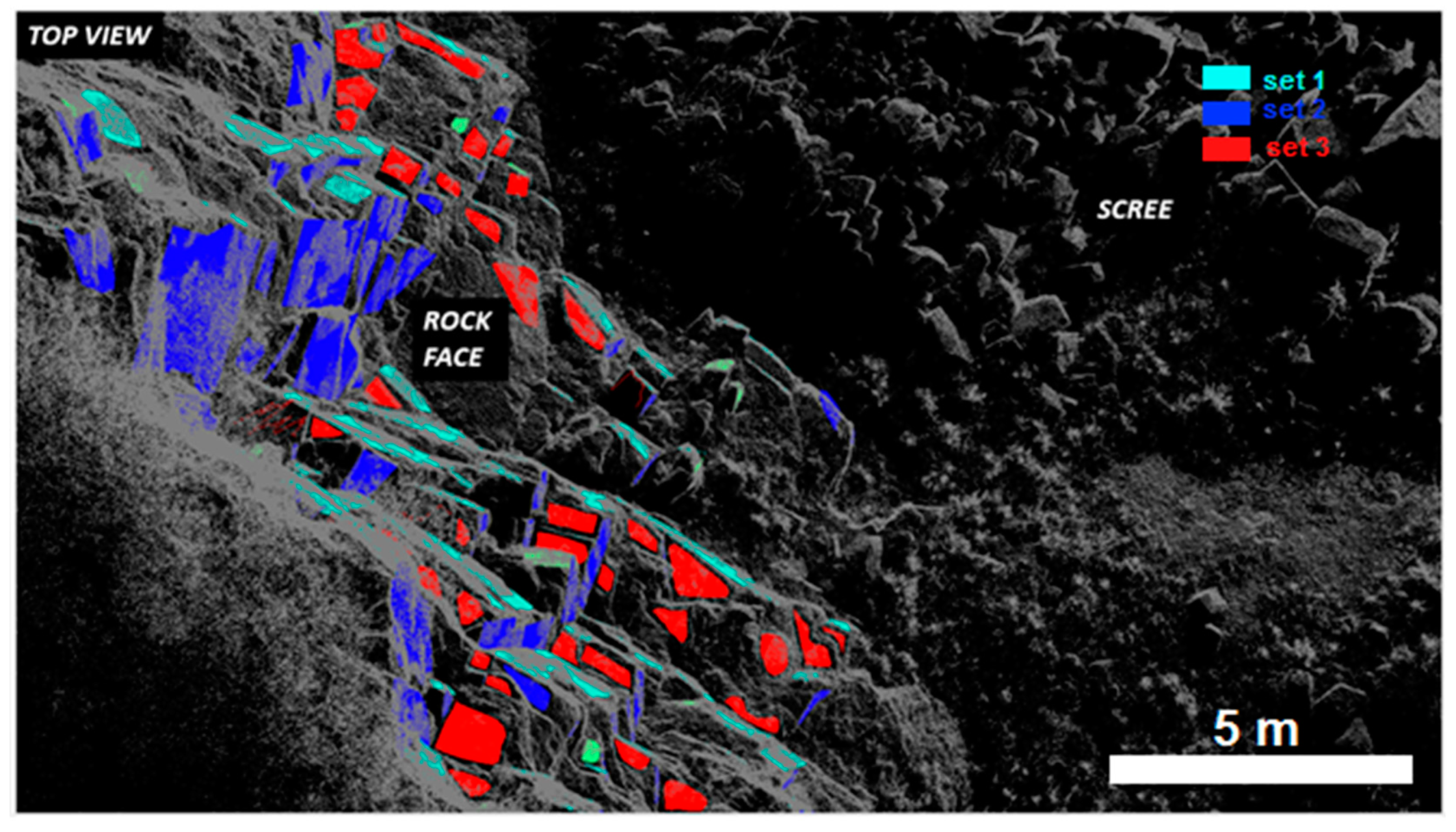
3.1. Geo-Mechanical Analysis
3.2. 2D Rockfall Trajectory Analysis (Rocfall 2D-LM)
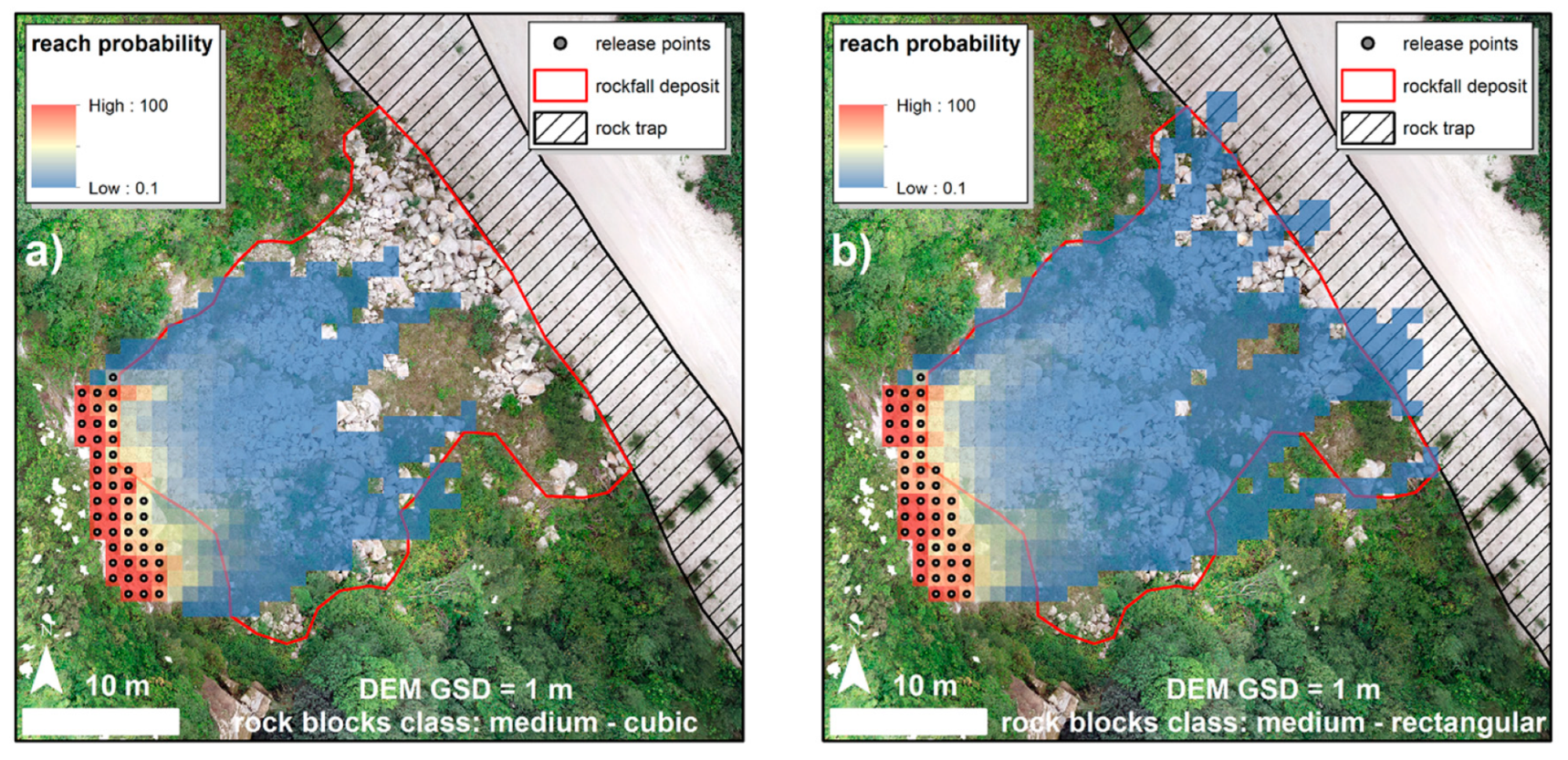
3.3. 3D Rockfall Trajectory Analysis (Rockyfor3D 3D-RB)
4. Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Riquelme, A.; Cano, M.; Tomás, R.; Abellán, A. Identification of Rock Slope Discontinuity Sets from Laser Scanner and Photogrammetric Point Clouds: A Comparative Analysis. Procedia Eng. 2017, 191, 838–845. [Google Scholar] [CrossRef]
- Health and Safety at Quarries. Quarries Regulations 1999. Approved Code of Practice and Guidance; L118 (Second edition); Health and Safety Executive: London, UK, 2013.
- Hutchinson, J.N. General Report: Morphological and geotechnical parameters of landslides in relation to geology and hydrogeology. In Proceedings of the Fifth International Symposium on Landslides, Lausanne, Switzerland, 10–15 July 1988; Bonnard, C., Ed.; Balkema: Rotterdam, The Netherlands, 1988; Volume 1, pp. 3–35. [Google Scholar]
- Ritchie, A.M. Evaluation of Rockfall and Its Control; Washington State Highway Commission, Committee on Landslide Investigations: Olympia, WA, USA, 1961. [Google Scholar]
- Varnes, D.J. Slope Movements. Types and Processes. TRB Special Report 176. In Landslides: Analysis and Control; Transportation Research Board: Washington, DC, USA, 1978; pp. 11–33. [Google Scholar]
- Cruden, D.M.; Varnes, D.J. Landslide Types and Processes; Special Report; Transportation Research Board, U.S. National Academy of Sciences: Washington, DC, USA, 1996; Volume 247, pp. 36–75.
- McCauley, M.L.; Works, C.B.W.; Naramore, S.A. Rockfall Mitigation; California Department of Transportation Report: Sacramento, CA, USA, 1985. [Google Scholar]
- Wyllie, D.C.; Mah, C.W. Rock Slope Engineering: Civil and Mining, 4th ed.; Routledge: London, UK, 2004; p. 456. [Google Scholar]
- Chau, K.T.; Wong, R.H.C.; Lee, C.F. Rockfall Problems in Hong Kong and Some New Experimental Results for Coefficients of Restitution. Int. J. Rock Mech. Min. Sci. 1998, 35, 662–663. [Google Scholar] [CrossRef]
- Chau, K.T.; Wong, R.H.C.; Wu, J.J. Coefficient of restitution and rotational motions of rockfall impacts. Int. J. Rock Mech. Min. Sci. 2002, 39, 69–77. [Google Scholar] [CrossRef]
- Crosta, G.B.; Agliardi, F. A methodology for physically based rockfall hazard assessment. Nat. Hazards Earth Syst. Sci. 2003, 3, 407–422. [Google Scholar] [CrossRef]
- Dorren, L.K.A. A review of rockfall mechanics and modelling approaches. Prog. Phys. Geogr. 2003, 27, 69–87. [Google Scholar] [CrossRef]
- Alejano, L.; Veiga, M.; Gómez-Márquez, I.; Dellero, H. Application of rockfall risk assessment techniques in two aggregate quarries. In Harmonising Rock Engineering and the Environment; Alejano, L.; Veiga, M.; Gómez-Márquez, I.; Dellero, H. CRC Press: Boca Raton, FL, USA, 2011; pp. 1861–1864. ISBN 978-0-415-80444-8. [Google Scholar]
- Corominas, J.; Matas, G.; Ruiz-Carulla, R. Quantitative analysis of risk from fragmental rockfalls. Landslides 2019, 16, 5–21. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Dudt, J.P.; Labiouse, V. An attempt to refine rockfall hazard zoning based on the kinetic energy, frequency and fragmentation degree. Nat. Hazards Earth Syst. Sci. 2005, 5, 621–632. [Google Scholar] [CrossRef]
- Salvini, R.; Francioni, M.; Riccucci, S.; Bonciani, F.; Callegari, I. Photogrammetry and laser scanning for analysing slope stability and rock fall runout along the Domodossola-Iselle railway, the Italian Alps. Geomorphology 2013, 185, 110–122. [Google Scholar] [CrossRef]
- Abellán, A.; Vilaplana, J.M.; Martínez, J. Application of a long-range Terrestrial Laser Scanner to a detailed rockfall study at Vall de Núria (Eastern Pyrenees, Spain). Eng. Geol. 2006, 88, 136–148. [Google Scholar] [CrossRef]
- Francioni, M.; Stead, D.; Clague, J.J.; Westin, A. Identification and analysis of large paleo-landslides at Mount Burnaby, British Columbia. Environ. Eng. Geosci. 2018, 24, 221–235. [Google Scholar] [CrossRef]
- Francioni, M.; Coggan, J.; Eyre, M.; Stead, D. A combined field/remote sensing approach for characterizing landslide risk in coastal areas. Int. J. Appl. Earth Obs. Geoinf. 2018, 67, 79–95. [Google Scholar] [CrossRef]
- Jaboyedoff, M.; Oppikofer, T.; Abellán, A.; Derron, M.-H.; Loye, A.; Metzger, R.; Pedrazzini, A. Use of LIDAR in landslide investigations: A review. Nat. Hazards 2012, 61, 5–28. [Google Scholar] [CrossRef]
- Lato, M.J.; Vöge, M. Automated mapping of rock discontinuities in 3D lidar and photogrammetry models. Int. J. Rock Mech. Min. Sci. 2012, 54, 150–158. [Google Scholar] [CrossRef]
- Fukuzono, T. A new method for predicting the failure time of a slope. Proceedings of 4th International Conference and Field Workshop on Landslides, Tokyo, Japan, 23–31 August 1985; pp. 145–150. [Google Scholar]
- Hutchinson, D.J.; Lato, M.; Gauthier, D.; Kromer, R.; Ondercin, M.; van Veen, M.; Harrap, R. Applications of remote sensing techniques to managing rock slope instability risk. In Proceedings of the GeoQuebec 2015, Quebec City, QC, Canada, 20–23 September 2015; p. 11. [Google Scholar]
- Martino, S.; Mazzanti, P. Integrating geomechanical surveys and remote sensing for sea cliff slope stability analysis: The Mt. Pucci case study (Italy). Nat. Hazards Earth Syst. Sci. 2014, 14, 831–848. [Google Scholar] [CrossRef]
- Salvini, R.; Francioni, M.; Riccucci, S.; Fantozzi, P.L.; Bonciani, F.; Mancini, S. Stability analysis of “Grotta delle Felci” Cliff (Capri Island, Italy): Structural, engineering–geological, photogrammetric surveys and laser scanning. Bull. Eng. Geol. Environ. 2011, 70, 549–557. [Google Scholar] [CrossRef]
- Tonini, M.; Abellan, A. Rockfall detection from terrestrial LiDAR point clouds: A clustering approach using R. J. Spat. Inf. Sci. 2014, 8, 95–110. [Google Scholar] [CrossRef]
- Carrivick, J.L.; Smith, M.V.; Quincey, D.J. Structure from Motion in the Geosciences; Wiley Blackwell: New York, NY, USA, 2016; p. 210. [Google Scholar]
- Francioni, M.; Salvini, R.; Stead, D.; Coggan, J. Improvements in the integration of remote sensing and rock slope modelling. Nat. Hazards 2018, 90, 975–1004. [Google Scholar] [CrossRef]
- Giordan, D.; Hayakawa, Y.; Nex, F.; Remondino, F.; Tarolli, P. Review article: The use of remotely piloted aircraft systems (RPASs) for natural hazards monitoring and management. Nat. Hazards Earth Syst. Sci. 2018, 18, 1079–1096. [Google Scholar] [CrossRef]
- Salvini, R.; Mastrorocco, G.; Esposito, G.; Di Bartolo, S.; Coggan, J.; Vanneschi, C. Use of a remotely piloted aircraft system for hazard assessment in a rocky mining area (Lucca, Italy). Nat. Hazards Earth Syst. Sci. 2018, 18, 287–302. [Google Scholar] [CrossRef]
- Ellis, R.J.; Scott, P.W. Evaluation of hyperspectral remote sensing as a means of environmental monitoring in the St. Austell China clay (kaolin) region, Cornwall, UK. Remote Sens. Environ. 2004, 93, 118–130. [Google Scholar] [CrossRef]
- Hill, P.I.; Howe, J.H. Primary lithological variation in the kaolinized St Austell Granite, Cornwall, England. J. Geol. Soc. 1996, 153, 827–838. [Google Scholar] [CrossRef]
- Tannant, D. Review of Photogrammetry-Based Techniques for Characterization and Hazard Assessment of Rock Faces. Int. J. Geohazards Environ. 2015, 1, 76–87. [Google Scholar] [CrossRef]
- Sturzenegger, M.; Stead, D. Quantifying discontinuity orientation and persistence on high mountain rock slopes and large landslides using terrestrial remote sensing techniques. Nat. Hazards Earth Syst. Sci. 2009, 9, 267–287. [Google Scholar] [CrossRef]
- Markland, J.T. A Useful Technique for Estimating the Stability of Rock Slopes when the Rigid Wedge Slide Type of Failure is Expected; Rock mechanics research report; report no. 19; Interdepartmental Rock Mechanics Project, Imperial College of Science and Technology: London, UK, 1972. [Google Scholar]
- Turner, A.K.; Duffy, J.D. Modelling and prediction of Rockfalls. In Rockfall: Characterization and Control; TRB: Washington, DC, USA, 2012. [Google Scholar]
- Li, L.; Lan, H. Probabilistic modelling of rockfall trajectories: A review. Bull. Eng. Geol. Environ. 2015, 74, 1163–1176. [Google Scholar] [CrossRef]
- Asteriou, P.; Saroglou, H.; Tsiambaos, G. Geotechnical and kinematic parameters affecting the coefficients of restitution for rock fall analysis. Int. J. Rock Mech. Min. Sci. 2012, 54, 103–113. [Google Scholar] [CrossRef]
- Bar, N.; Nicoll, S.; Pothitos, F. Rock fall trajectory field testing, model simulations and considerations for steep slope design in hard rock. In Proceedings of the First Asia Pacific Slope Stability in Mining Conference, Brisbane City, Australia, 6–8 September 2016; p. 10. [Google Scholar]
- Azzoni, A.; Rossi, P.P.; Drigo, E.; Giani, G.P.; Zaninetti, A. In situ observation of rockfall analysis parameters. In Proceedings of the VI International Symposium on Landslides, Christchurch, South Island, New Zealand, 10–14 February 1992. [Google Scholar]
- Bourrier, F.; Berger, F.; Tardif, P.; Dorren, L.; Hungr, O. Rockfall rebound: Comparison of detailed field experiments and alternative modelling approaches. Earth Surf. Process. Landf. 2012, 37, 656–665. [Google Scholar] [CrossRef]
- Spadari, M.; Giacomini, A.; Buzzi, O.; Fityus, S.; Giani, G.P. In situ rockfall testing in New South Wales, Australia. Int. J. Rock Mech. Min. Sci. 2012, 49, 84–93. [Google Scholar] [CrossRef]
- Stevens, W.D. ROCFALL: A Tool for Probabilistic Analysis, Design of Remedial Measures and Prediction of Rockfalls. Master’s Thesis, University of Toronto, Toronto, ON, Canada, 1988. [Google Scholar]
- Dorren, L.K.A. Rockyfor3D v5.2 revealed. In Transparent Description of the Complete 3D Rockfall Model; ecorisQ paper; ecorisQ: Geneva, Switzerland, 2016; p. 32. [Google Scholar]
- Arpa Piemonte—Centro Regionale per le Ricerche Territoriali e Geologiche. ARPA Progetto n. 165 PROVIALP, Protezione Della Viabilità Alpine—Relazione Finale; Arpa Piemonte: Milan, Italy, 2008. [Google Scholar]
- Pierson, L.A.; Gullixson, C.F.; Chassie, R.G. Rockfall Catchment Area Design Guide; Final Report (Metric Edition); Oregon Department of Transportation and Federal Highway Administration: Washington, DC, USA, 2001. [Google Scholar]
- Dorren, L.K.A.; Maier, B.; Putters, U.S.; Seijmonsbergen, A.C. Combining field and modelling techniques to assess rockfall dynamics on a protection forest hillslope in the European Alps. Geomorphology 2004, 57, 151–167. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint Set | Mean Dip (°) | Stdv (°) | Mean Dip Direction (°) | Stdv (°) |
|---|---|---|---|---|
| 1 | 86.3 | 3.1 | 205.7 | 5.1 |
| 2 | 85.5 | 2.7 | 89.7 | 9.7 |
| 3 | 53.6 | 2.6 | 41.0 | 12.8 |
| 4 | 9.3 | 1.9 | 313.5 | 19.1 |
| 2D-LM Terrain Type | CoRN | CoRT | Friction Angle (°) |
|---|---|---|---|
| Granite/Rock face | Mean: 0.45 | Mean: 0.80 | Mean: 30 |
| Std Dev: 0.04 | Std Dev: 0.04 | Std Dev: 0 | |
| Rel. Min: 0.12 | Rel. Min: 0.12 | Rel. Min: 0 | |
| Rel. Max: 0.12 | Rel. Max: 0.12 | Rel. Max: 0 | |
| Scree slope | Mean: 0.35 | Mean: 0.70 | Mean: 30 |
| Std Dev: 0.04 | Std Dev: 0.03 | Std Dev: 0 | |
| Rel. Min: 0.12 | Rel. Min: 0.9 | Rel. Min: 0 | |
| Rel. Max: 0.12 | Rel. Max: 0.9 | Rel. Max: 0 | |
| Rock trap | Mean: 0.25 | Mean: 0.60 | Mean: 30 |
| Std Dev: 0.04 | Std Dev: 0.04 | Std Dev: 0 | |
| Rel. Min: 0.12 | Rel. Min: 0.12 | Rel. Min: 0 | |
| Rel. Max: 0.12 | Rel. Max: 0.12 | Rel. Max: 0 |
| 2D-LM Rock Block Classes | Mass (kg) | Density (kg/m3) |
|---|---|---|
| Small | Mean: 300 | Mean: 2650 |
| Std Dev: 25 | Std Dev: 10 | |
| Rel. Min: 75 | Rel. Min: 30 | |
| Rel. Max: 75 | Rel. Max: 30 | |
| Medium | Mean: 1500 | Mean: 2650 |
| Std Dev: 50 | Std Dev: 10 | |
| Rel. Min: 150 | Rel. Min: 30 | |
| Rel. Max: 150 | Rel. Max: 30 | |
| Large | Mean: 0.25 | Mean: 0.60 |
| Std Dev: 0.04 | Std Dev: 0.04 | |
| Rel. Min: 0.12 | Rel. Min: 0.12 | |
| Rel. Max: 0.12 | Rel. Max: 0.12 |
| 3D-RB Terrain Type | Rockyfor3D Soil Type | Mean CoRN | CoRN Value Range | Rg70 (m) | Rg20 (m) | Rg10 (m) |
|---|---|---|---|---|---|---|
| Vegetated slope | 1—Fine soil material (depth > ~100 cm) | 0.23 | 0.21–0.25 | 0.3 | 0.5 | 0.9 |
| Scree slope | 4—Talus slope (Ø > ~10 cm), or compact soil with large rock fragments | 0.38 | 0.34–0.42 | 0.25 | 0.5 | 0.9 |
| Rock trap | 1—Fine soil material (depth > ~100 cm) | 0.23 | 0.21–0.25 | 0.01 | 0.05 | 0.15 |
| Haul road | 5—Bedrock with thin weathered material or soil cover | 0.43 | 0.39–0.47 | 0 | 0 | 0.1 |
| 3D-RB Rock Classes | Volume (m3) | Block Shape (m) | Density (kg/m3) | Mass (kg) |
|---|---|---|---|---|
| Small | 0.125 | Cubic 0.50 × 0.50 × 0.50 | 2650 | 331 |
| Medium | 0.576 | Cubic 0.80 × 0.80 × 0.90 | 2650 | 1526 |
| Medium | 0.576 | Rectangular 0.40 × 0.80 × 1.80 | 2650 | 1526 |
| Large | 1.000 | Cubic 1.00 × 1.00 × 1.00 | 2650 | 2650 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Robiati, C.; Eyre, M.; Vanneschi, C.; Francioni, M.; Venn, A.; Coggan, J. Application of Remote Sensing Data for Evaluation of Rockfall Potential within a Quarry Slope. ISPRS Int. J. Geo-Inf. 2019, 8, 367. https://doi.org/10.3390/ijgi8090367
Robiati C, Eyre M, Vanneschi C, Francioni M, Venn A, Coggan J. Application of Remote Sensing Data for Evaluation of Rockfall Potential within a Quarry Slope. ISPRS International Journal of Geo-Information. 2019; 8(9):367. https://doi.org/10.3390/ijgi8090367
Chicago/Turabian StyleRobiati, Carlo, Matt Eyre, Claudio Vanneschi, Mirko Francioni, Adam Venn, and John Coggan. 2019. "Application of Remote Sensing Data for Evaluation of Rockfall Potential within a Quarry Slope" ISPRS International Journal of Geo-Information 8, no. 9: 367. https://doi.org/10.3390/ijgi8090367
APA StyleRobiati, C., Eyre, M., Vanneschi, C., Francioni, M., Venn, A., & Coggan, J. (2019). Application of Remote Sensing Data for Evaluation of Rockfall Potential within a Quarry Slope. ISPRS International Journal of Geo-Information, 8(9), 367. https://doi.org/10.3390/ijgi8090367