1. Introduction
By 2025, more than 80% of the government, community, and headquarter buildings or structures will be equipped with SHM [
1] systems i.e., as real-time systems that realize the knowledge of integrity of structures using SHM devices [
2]. Sensors diversity and parameter estimation for structural health to forecast zonal safety have always been a dream for geologists, environmental scientists, and international authorities. The recent works have led to very noticeable innovation in SHM heterogeneous sensing platforms like HaLOEWEn [
3], HaLoMote architecture [
3], and the Martlet (i.e., next generation sensing node) [
4]. HaLoMote and Martlet need improvement in GPS, node to node communication for networking and sensor clustering. One potential gap observed in [
1,
2,
3] consists of application specific nodes with dedicated sensors for SHM that can address the monitoring of real-time structural integrity using geometrical variables like tilt, vibration, and displacement data. An appreciable effort has been done using heterogeneous sensing nodes with heterogeneous network clustering that can be defined as heterogeneous M-Nodes (sensor-nodes) heterogeneously networked using m-Net of M-Nodes andμ-nets [
5]. All [
3,
4,
5] need to be optimized in terms of GPS, SHM specified definitions, and fault-tolerant networking, which are addressed in this work using GPS, CANopen, and SHM focused node outputs. A plethora of inputs [
6,
7] was observed in utilization of mobile phones or smart phones sensors and apps as ubiquitous [
6] edge nodes for heterogeneous sensing, mobility and GPS capability for various monitoring applications using SmartMonitor [
7] and vSensor [
8]. SOUL [
9] also addressed the edge and the cloud architecture. A lapse in real-time centralized and distributed monitoring and decision-making was found in [
6,
7,
8,
9]. This has been addressed in our work using web application running a Raspberry Pi 3 using JavaScript of 10ms refresh rate. A noticeable gap in works [
1,
2,
3,
4,
5,
6,
7,
8,
9] is the SHM specific sensor signal scaling which is indeed needed for critical feature extraction, range configurability required for severity and abnormalities detection. Nevertheless, a fault-tolerant sensor solution that employs high-precision sensor nodes with state of the art noise filters with better noise margin, rangeability, scalability, and programmable System-on Chip (PSoC) facilitating the synchronization problems in sensor heterogeneous network clusters, is needed.
Utility Computing (UC) is commonly used as not having an eye on the background framework of the supply chain to deal with problems. UC is the application of cloud computing that encompasses algorithms and theorems in a way that consumer is getting direct applications and benefits like in cases of Uber, Careem, AliExpress, Food Panda, and Google Maps [
10,
11,
12]. UC services react with distributed Geographical Information Systems (GIS) platforms like Google Maps to enable applications like Navisworks and Building Information Modeling (BIM) resulting in heterogeneous Geographical Area Networks (GAN) has not been observed in the big picture of UCM in [
13,
14,
15,
16,
17]. The works [
10,
11,
12,
13,
14,
15,
16,
17] are unable to provide a single programmable platform for sensors, data acquisition, data processing, real-time geo-analytics that can work as a better perception system. The concept MobileHub [
17], i.e., developing a mesh network of smart phones as geospatial heterogeneous sensing nodes and make one master node as a gateway for decision making needs an SHM decision infrastructure improvement defined in Reference [
18] as STEM, cSHM, and DependSHM compared in Diagram 9 in Reference [
19]. The EU project IRIS [
20] recommendation for utilizing ontologies to integrate heterogeneous decision support systems as Rapid Miner, WEKA, GNU, and MATLAB GNU Octave focuses on BRIMOS, as shown in Figures F17.1, F17.3, and F17.8. There is a requirement of a utility private and public cloud with nodes to gateway, gateways to server, which has been addressed by our SHM-UCM. On the other hand, SHM system is a systematic instrumentation and telemetry system that shows the fitness of a structure as a front-end. In SHM systems, only derived parameters that justify the condition of structures which are visible to consumers based on results at abstract level is the core ‘lifecycle management utility’ for stakeholders [
20,
21]. However, in the SHM parameters driven sensors selection process for parametric SHM, sensors are not compatible with UC Infrastructure (UCI). The smart geospatially articulated sensing model presented in Reference [
22], as depicted in Figure 25.13, i.e., all nodes connected through a wireless network and then server connected to satellite using very small aperture antenna transmitter (VSAT) that has no contribution in the big picture of GIS. A need of a real-time SHM layer derived from data of geospatially-distributed edge devices in structures under monitoring is stressing. A set of private clouds of SHMs that should be integrated into a public cloud using the network of satellites in order to enable the infrastructure and architecture actors to access every satellite remotely to make decisions based on the SHM-UCM layer and the real-time data of sensors. Fault-tolerant real-time sensors based decision making integration and abstract SHM-UCM GIS layer generation, as model geo-informatics system leading to a stable construction industry is our end goal in this work that is a novel. To summarize, the existing geo-informatics systems lack SHM-based real-time sensing platform that connects the sensor to cloud and lead to a unified SHM based geo-informatics decision. Such a platform has been designed and implemented in this work in form of SHM-UCM. For an urban scale aimed to geo-informatics applications, it is mandatory to have minimum network traffic and site payloads to avoid the eventual severe conditions like data fusion commonly observed in urban scale implementations. The works [
20,
21,
22] need to be tuned and customized for urban scale geo-informatics for smart cities applications to have only final, yet abstract, results accessible at decision-making levels.
The SHM designs discussed in Reference [
21] is an acute process, while taking into account cloud integration and real-time operations of machine learning algorithms. SHM implementations using wireless sensors networks for Internet of Things (IoT) models [
22,
23] need improvement in their UC aspect, that is, there must be some algorithms and data processing that can assist Open System Interconnection (OSI) model, which should be application layer (layer 6), and presentation layer (layer 7) devices and applications. Deep Learning (DL) has been implemented on raspberry pi but still needs improvement for cloud compatibility and pairing with mathematical techniques mentioned in [
24]. We believe that the role of SHM is very vital in reporting disasters and handling any abnormal and hazardous condition using seismic waves analysis through several signal processing algorithms, i.e., Frequency Domain Decomposition (FDD) and Eigen System Realization Algorithm (ERA), as defined in Reference [
25,
26,
27,
28]. Nonetheless, a multi-layer interoperable algorithm is required that can take multiple variables and output multiples decisions based on required solutions at edge (private cloud) and GAN (public cloud) level. The multi-parametric heterogeneity and scalability effectiveness has become mandatory requirement in algorithm application from urban to global scale facilitation. The proposed algorithm addresses core issues like local, urban-scale, and global scale heterogeneous sensing, multi-parametric, and multi-objective computation for SHM and GAN based machines.
This work focuses on
In
Section 2, SHM UCM is explained using the GAN concept.
Section 3shows deployed SHM for model evaluation along with SHM nodes created in this work.
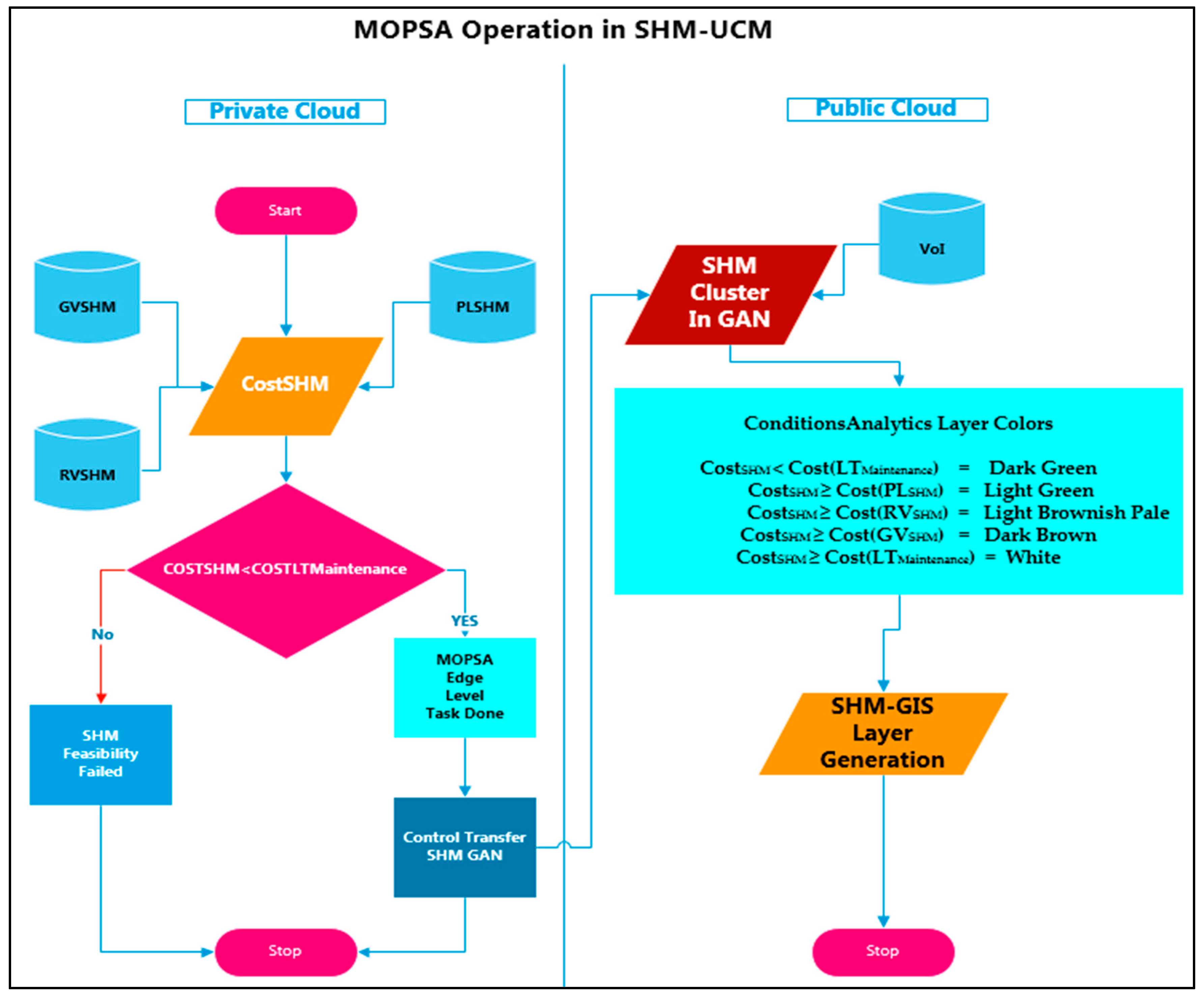
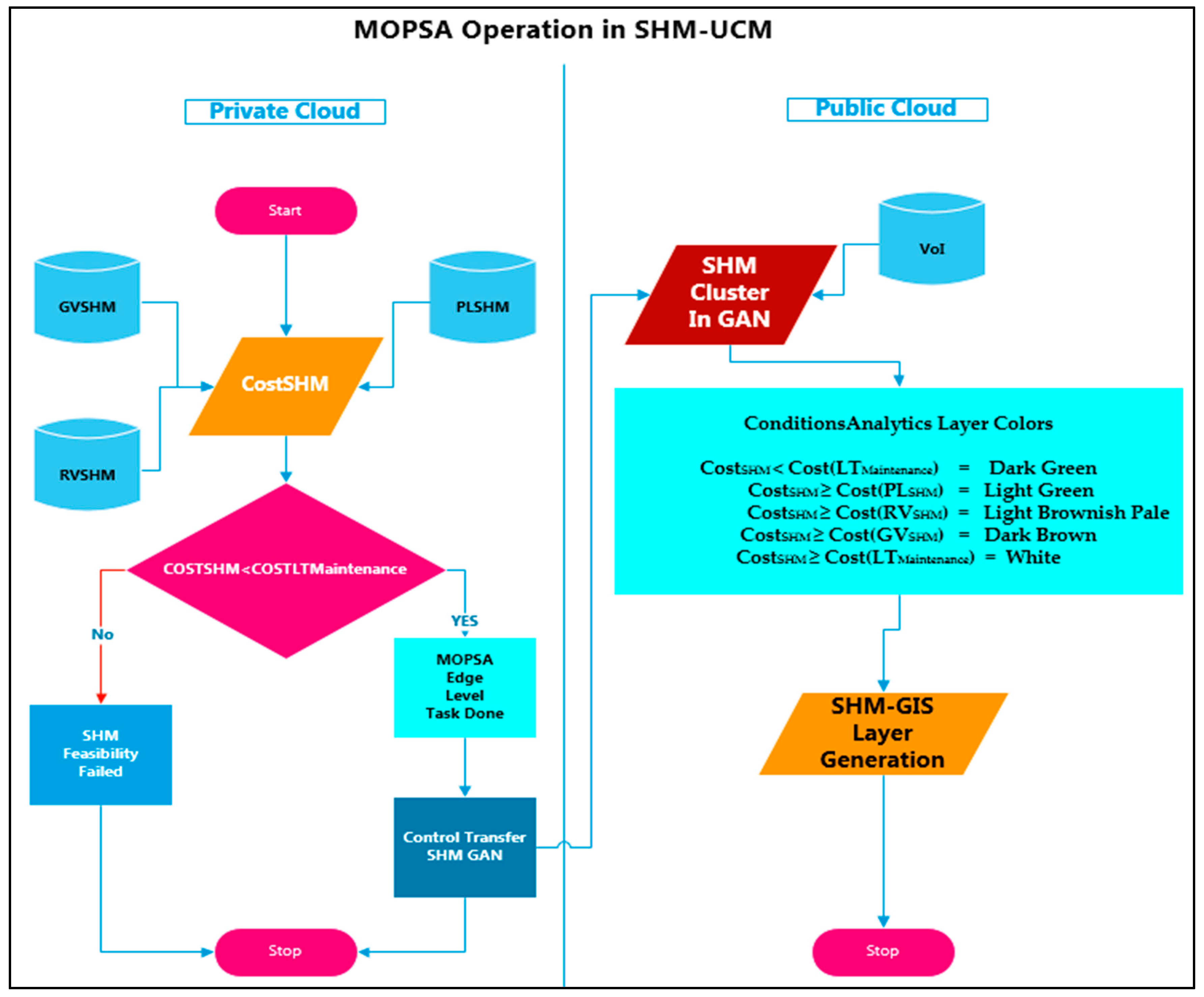
Section 4 discusses MOSPA, where the results are demonstrated in
Section 5. MOSPA is a meta-heuristic sequential set of techniques that decides and evaluates the necessity of SHM in a geographical cluster under observation. The last section gives concluding thoughts and future recommendations about the proposed work.
The SHM-UCM has some limitations at software and hardware level. At the hardware level, all the sensors and networks defined in the architecture have to be homogenous with the structural variables needed. At the software side, the algorithm has to be incorporated with sequentially computed values from equations in a way that if some sensor value is missing it can approximate or interpolate from last two values in all fields to normalize the results. The results if not normalized will generate discrepancy between real time health on site and the one being shown on the layer generated by the SHM-UCM.
Moreover, GAN implementation limitation does exist as VSAT Data Packages prices provided by Satixfy [
29], KiyuritsuRadio [
30], Melat [
31], and Telenor [
32]. Price’s trends show an exponential decay in rates in coming years but right now out designed SHM-UCM GAN seems to only work on architectures like CubeSat and Thumbsat.
2. The SHM Utility Computing Model (SHM-UCM)
This work recommends a structured SHM that operates in compliance with a given Safety Integrity Level (SIL) and independently at Emergency Shutdown (ESD) level. SIL is governed by Structural Integrity Management (SIM) platform that over-rules decisions of Building Management Systems (BMSs). ESD is a binary decision based enveloped estimation that makes the structural health qualification criteria either passes or fail. SIM control parameters are set by GAN based on the geological, geographical, and geo-mechanic transients’ prediction assisted by weather stations. To this end, we present a SHM-GAN with heterogeneous Machine Learning (ML) algorithms engine in a distributed SIM framework at a lithosphere level, i.e., a separate SIM for a separate crust composition. Sandy, soiled, rocked, and limestone based areas have different foundation requirements for different type structures. GIS has critical databases of dynamic and real-time update in datasets for real patches on the crust.
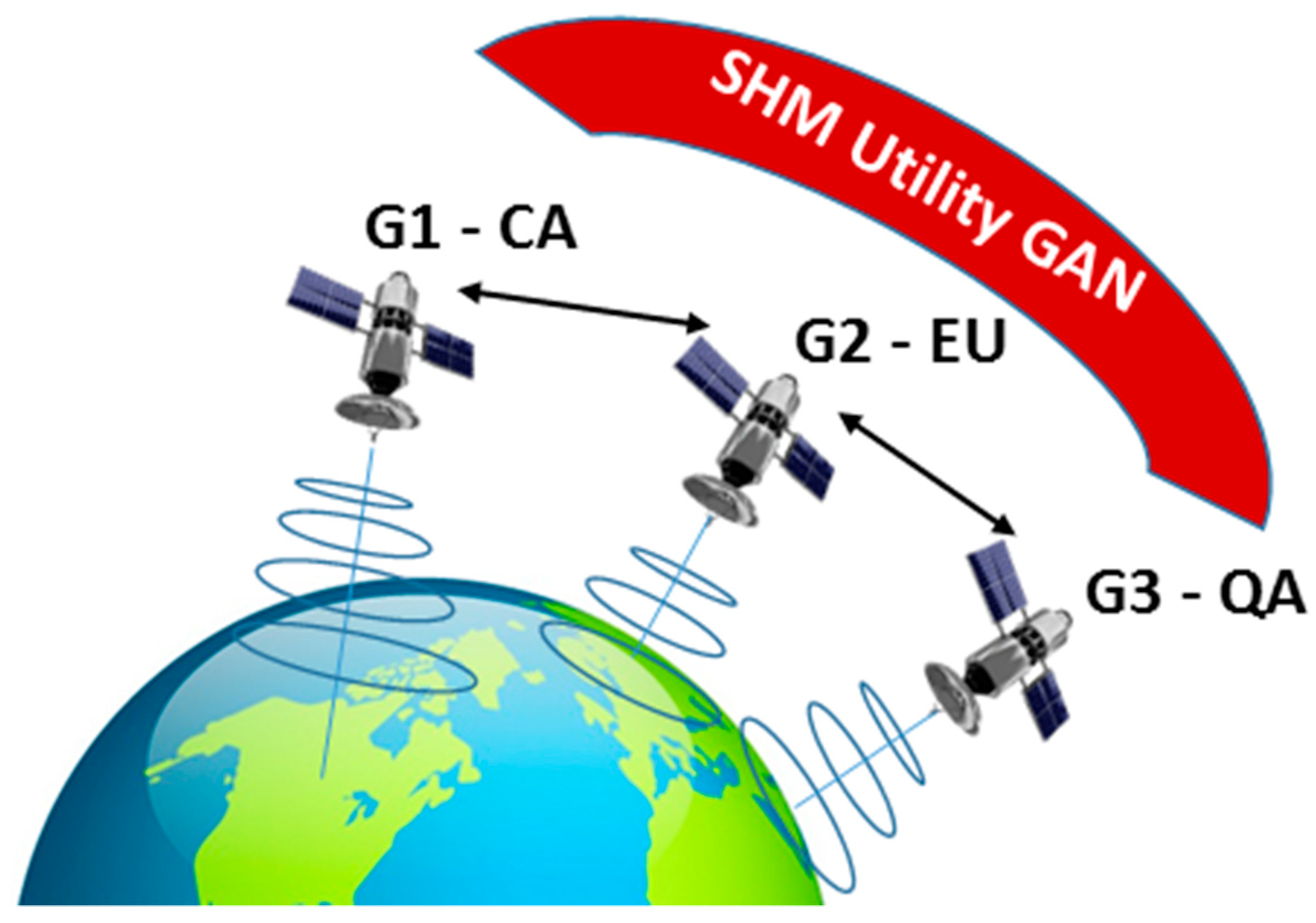
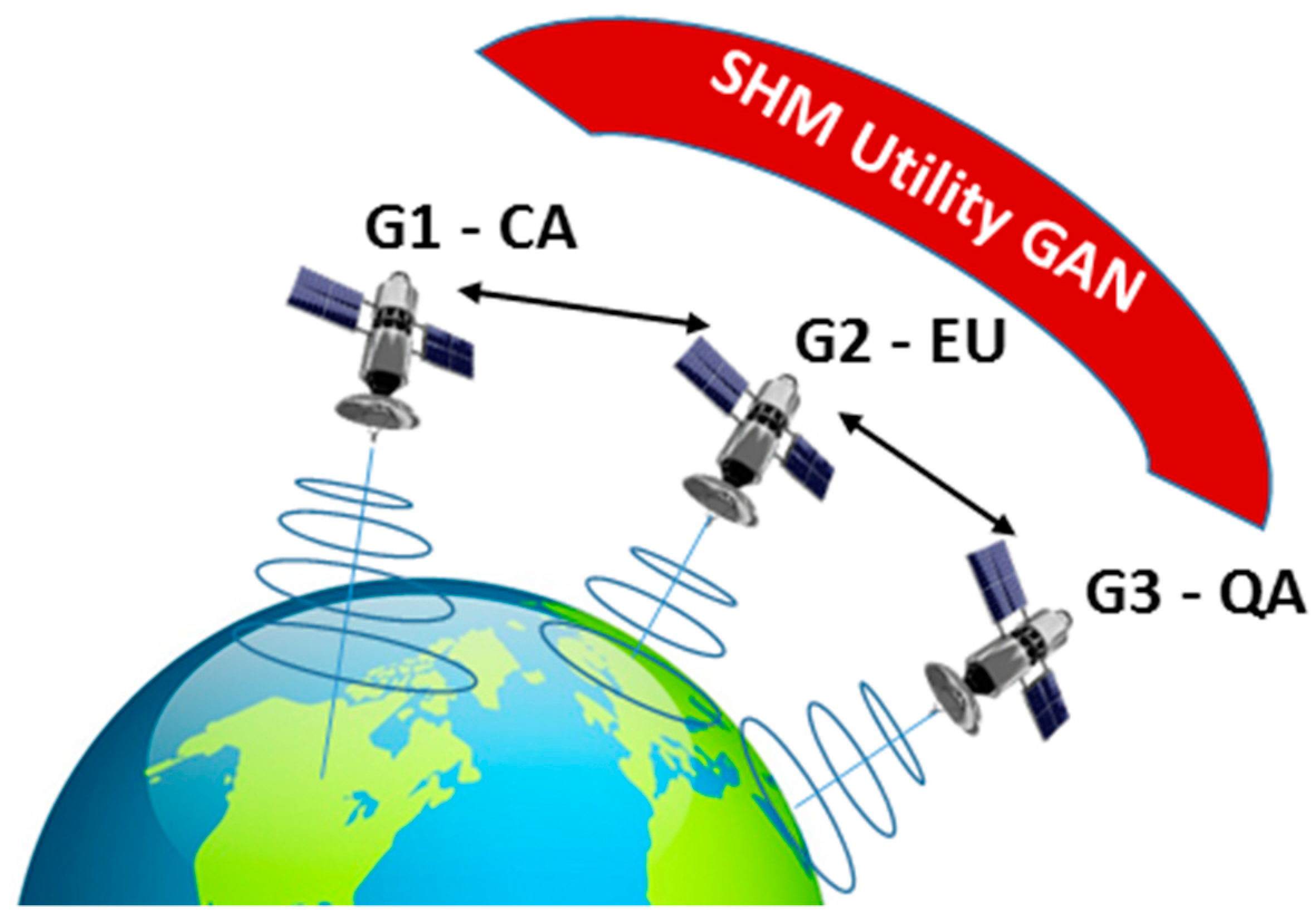
Figure 1 illustrates the proposed conceptual model of SHM-UCM networked through a mesh of SHM-GAN of the geospatial orientation of satellites dedicated for SHM. Three heterogeneous intracontinental patches are selected G1 for Canada, G2 for European Union and G3 for Qatar. Three different sizes have been selected to realize that freedom of observational geophysical patch selection. One each satellite i.e., G1, G2, and G3 decisions are made by MOSPA (proposed algorithm). This SHM-GAN enables globally engineered and administered implementation schemes for SHM for governments to reduce routine exhaustive calculations by Project Management Consultants (PMC). Quick tendering, systematic City, and Regional Planning (CRP) initiatives are examples of noticeable outcomes of this SHM-UCM, to mention few.
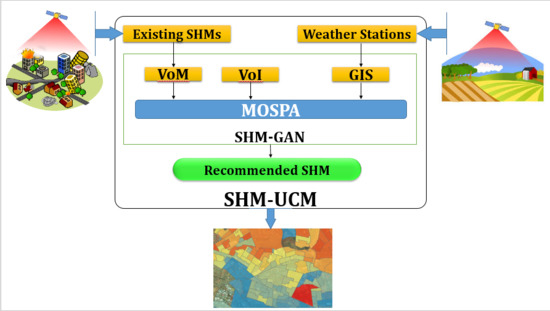
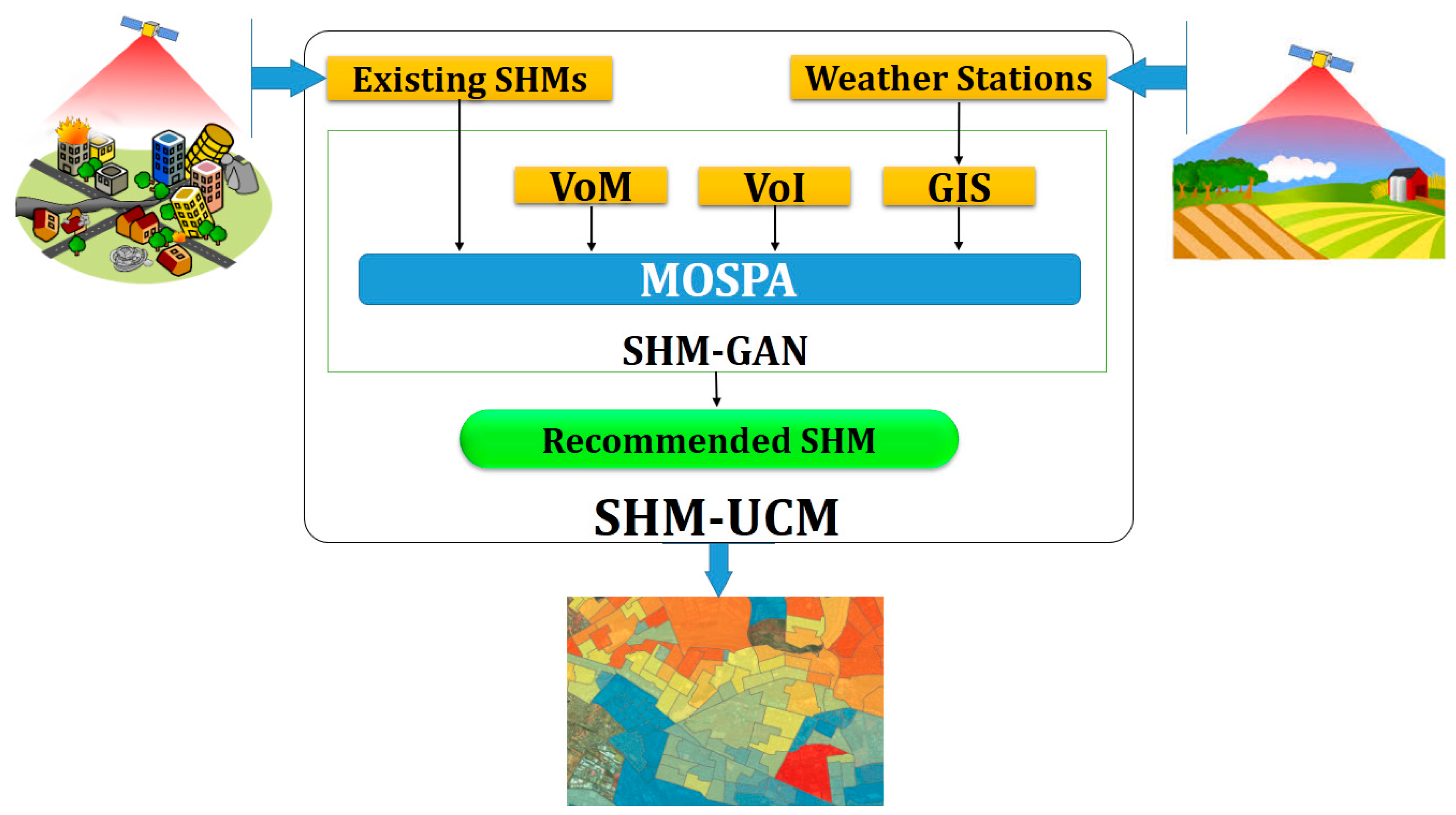
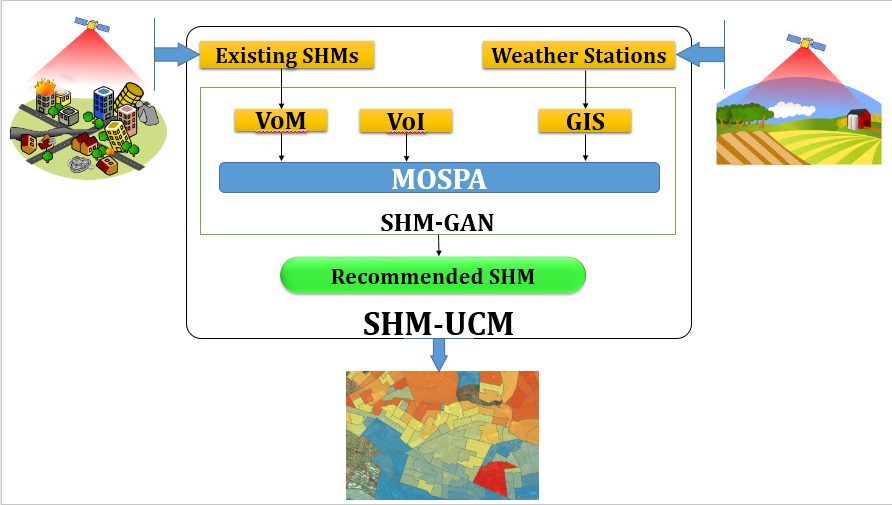
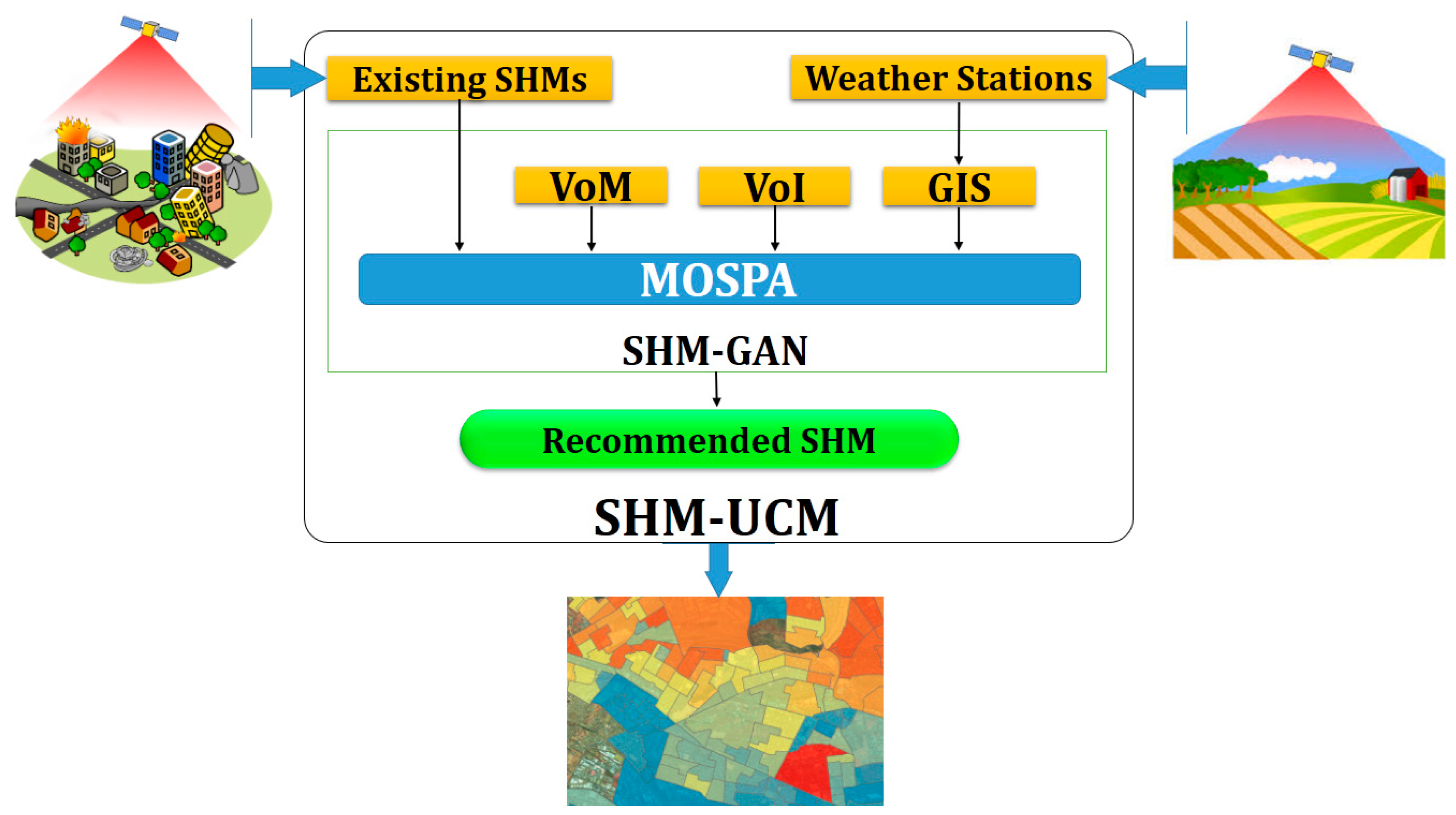
Figure 2 shows a complete overview of proposed SHM-UCM. It is evident that the data is taken from Existing SHM systems, Weather Stations GIS and VoI, analyzed by proposed MOSPA algorithm—resulting in SHM-GAN, i.e., satellite-based system running MOSPA. This complete analysis of input data and resulting in a geo plot for dynamically planning of SHM systems is ‘Structural Health Monitoring Utility Computing Model’. In real-time SHM systems for urban scale the need of private cloud is mandatory due to rapid response and for global scale the necessity of Public Cloud is mandatory. The private cloud has very fast response due to focused area and wide throughputs. On the other hand, the public cloud is dependent on worldwide internet is thus slower due to big bottlenecks, but has an advantage of IoT and GIS that a private cloud does not have.
3. Structural Health Monitoring Systems
The Body Area Heterogeneous Network (BAHN) for the SHM system is designed for a structure in which after hundreds of iterations in BIS frameworks, Value of Information is evaluated and finalized by multi-disciplinary Subject Matter Experts inputs to ML algorithm. A SHM is a sequential and systematic process in which the end product is a trustable abstract decision parameters dataset based on the data collected from SHM system variables. Firstly, the SHM is developed and deployed on structures-specific mandates that need to be monitored (e.g., residential, commercial, bridges, and tunnels). SHM system architecture is based on extracting upper and lower bounds of Finite Element Analysis (FEA) data. By upper and lower bound we mean the maximum and minimum values at which the structure is expected or meant to stay fully fit. A SHM system is a unique system that has to serve the purpose for lifecycle evaluation of structure for a structure for the next 10 years.
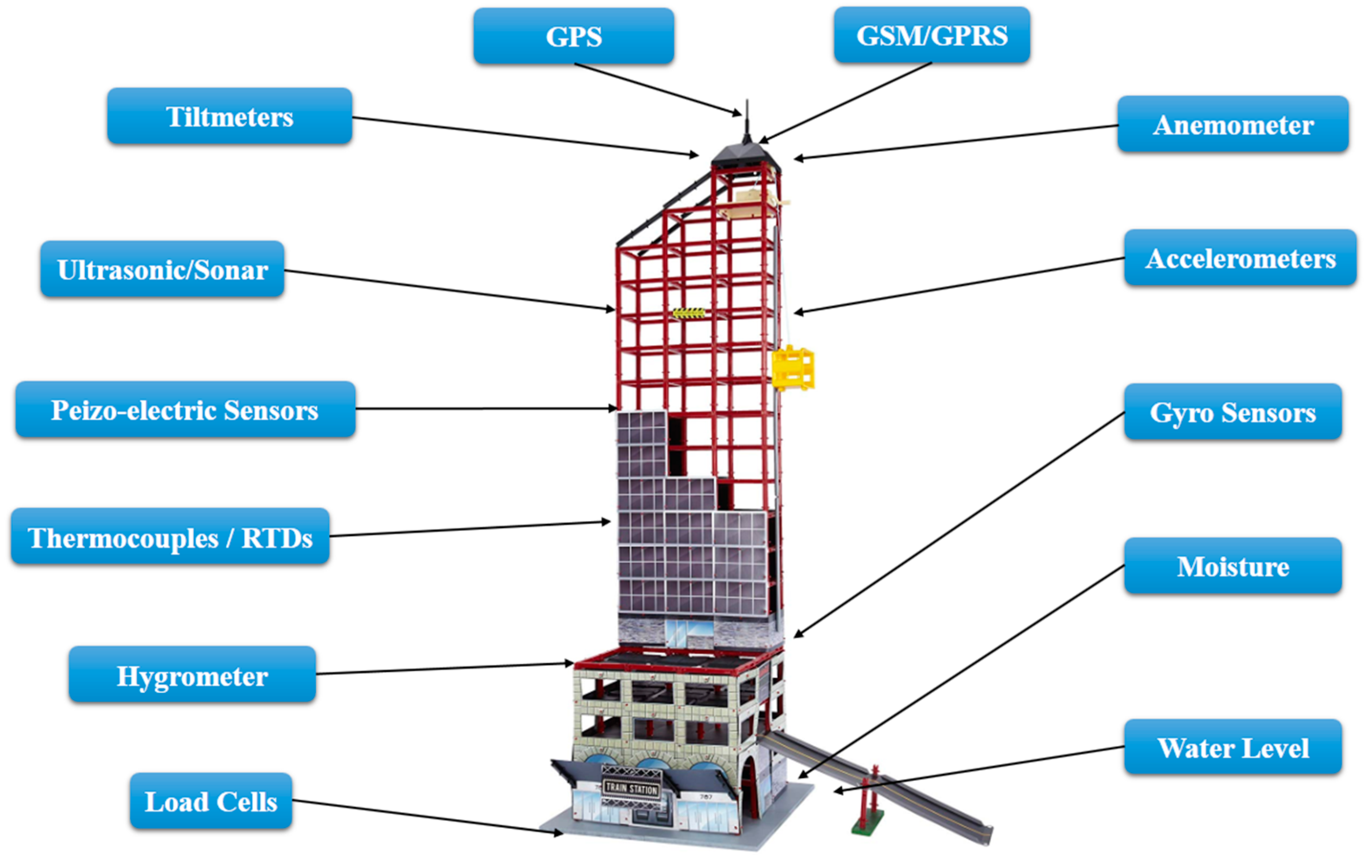
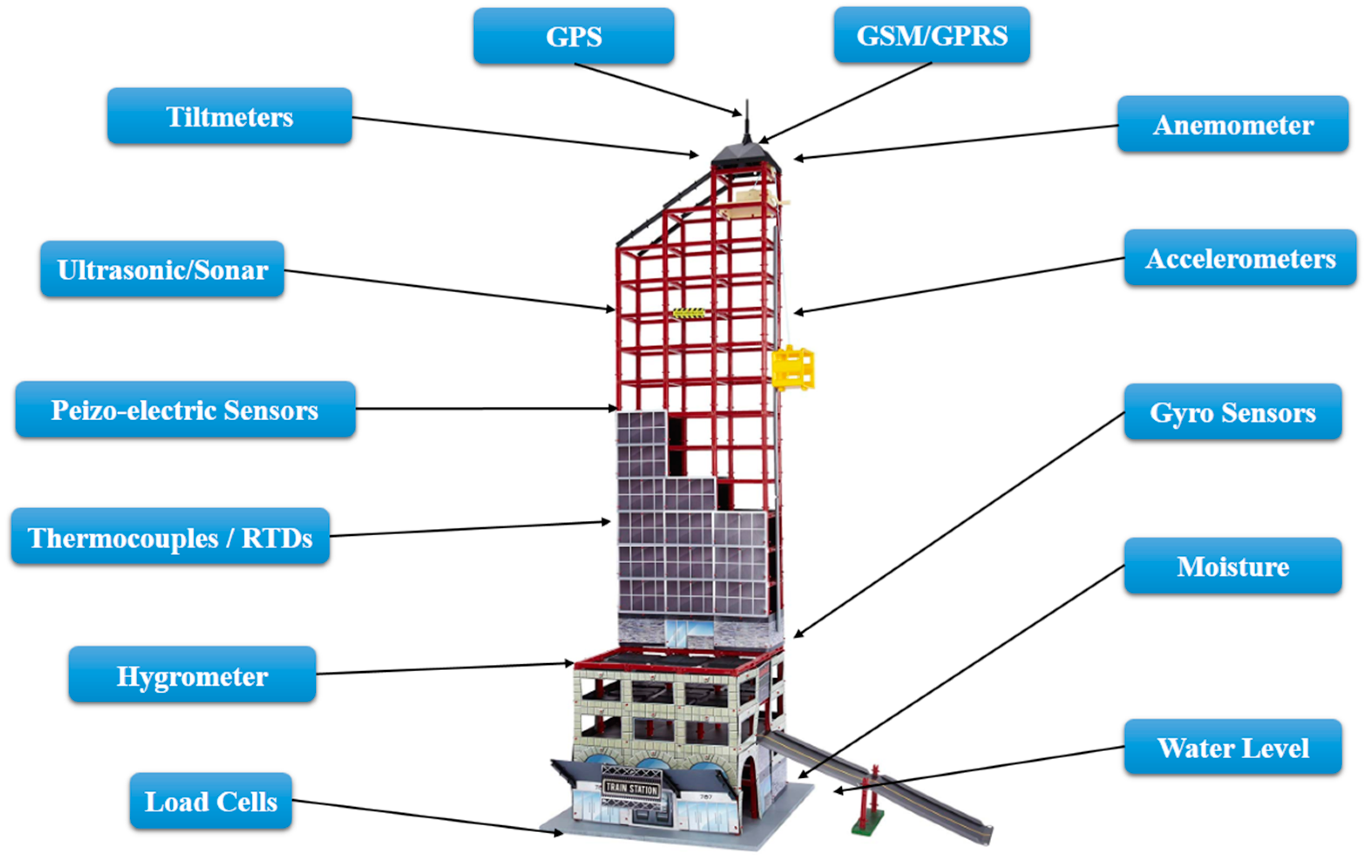
In
Figure 3, a common SHM system has been shown based on Level of Detail 6 from building information system (BIS) documentation for a particular structure. This SHM system includes several sensors to measure the structure health, which includes weight (load cells), water level, moisture (hygrometer), balance (gyro sensors), temperature (thermocouples or resistance temperature detectors), accelerometers (vibration), pressure indoor and outdoor (piezo-electric sensors), collision or obstacle detection in vicinity (ultrasonic sensors or sonar), tilt and inclination (tiltmeter), and wind speed (anemometer). Secondly, the location and data communication is being achieved using GPS and GSM/GPRS, respectively. The variables shown vary from structure to structure and is a complex set of the formulation by a multi-disciplinary team. These variables can vary the SHM parameter estimation and feature extraction; in other words, directly affect the technical assessment of VoI of the respective structure. These SHM sensors have specific orientation and locations, which are calculated as per geospatial constraints. These sensors vary based on VoI calculated for the building and expected enormity of the disaster. This work is an effort toward the development of a smarter service oriented UCM that will bring the multi-disciplinary procedures and practices under one umbrella called SHM-UCM.
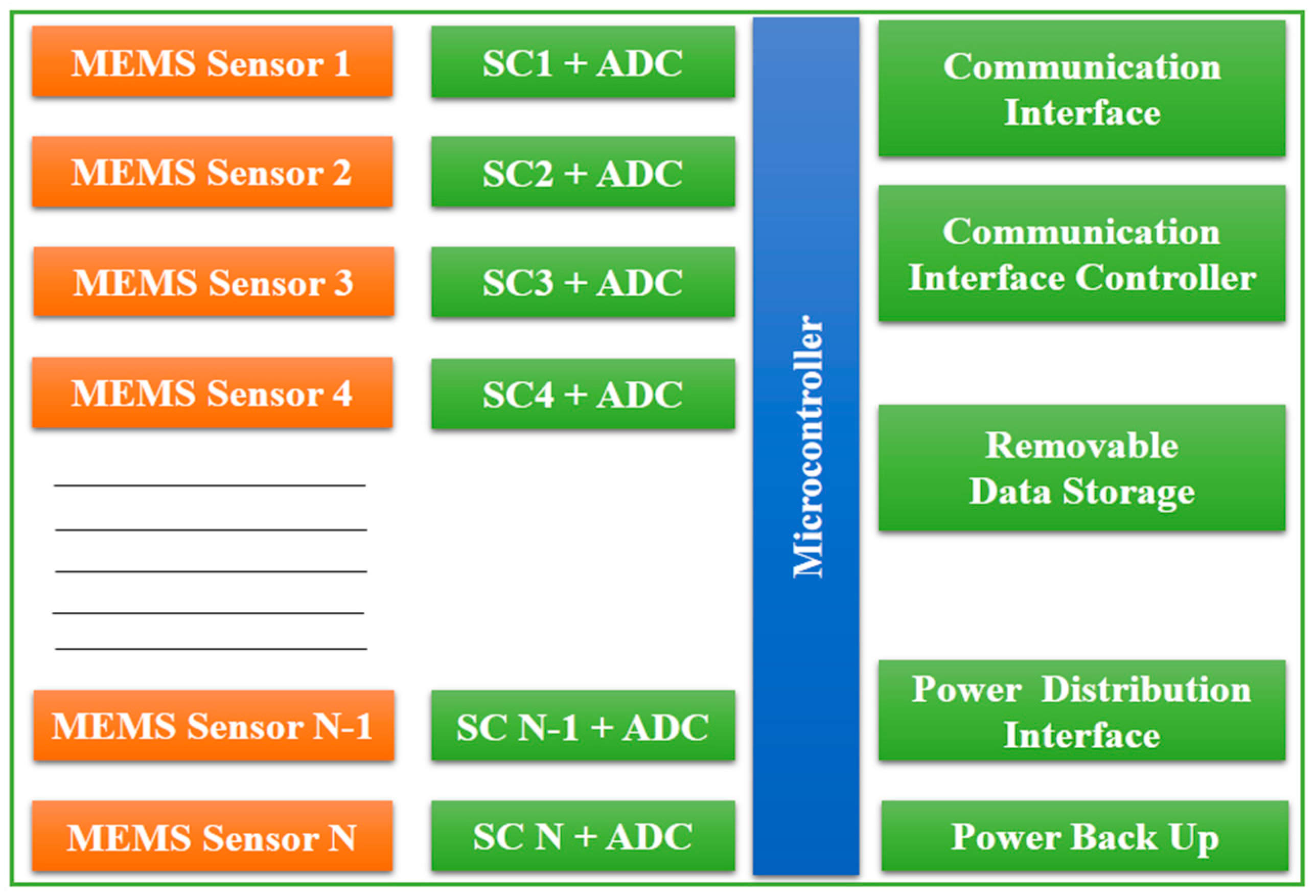
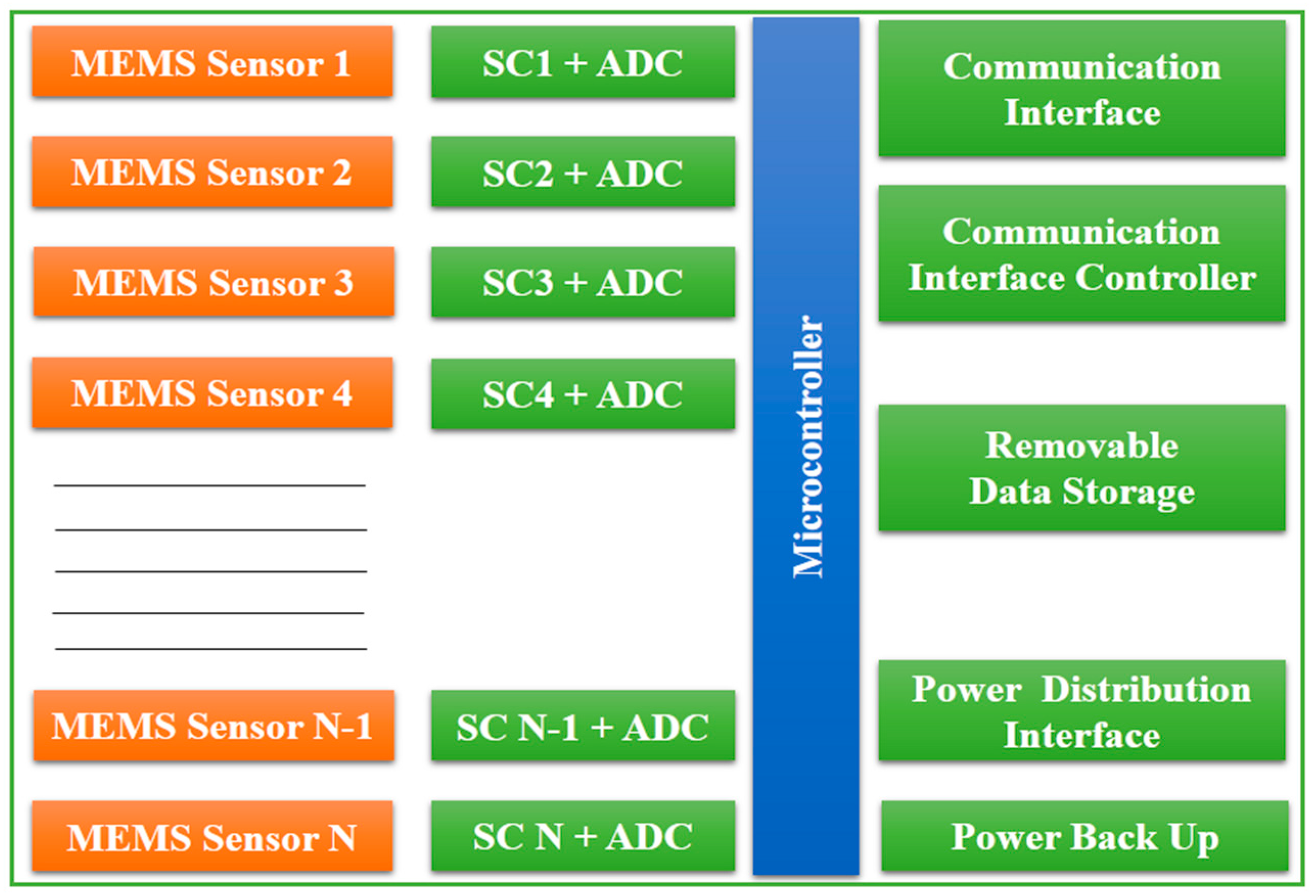
By 2018, the exponential rise in SHM nodes deployment has been registered across the world at institutional and organizational level with different topologies, architectures, and frameworks on various IoT platforms [
17,
18]. For in-situ long-haul seamless monitoring, a most successful and frequent node architecture is used, which comprises a range of sensors, application specific scale Signal Conditioners (SCs), and high-resolution Analog to Digital Converter (ADC) chips and microcontrollers (e.g., Intel 8051, Microchip P18F458 and ATMega32).
Figure 4 illustrates a typical SHM node used for heterogeneous Body Area Network (BAN) implementations for existing SHM systems [
19]. It has to go through a sequence of primitive data processing methods to be compatible with SHM systems. This SHM Node has to be orchestrated like a cloud framework ZeRo Client (ZRC), ThiN Client (TNC) and ThicK Client (TKC) nodes so that it fits in the ecosystem of Industry 4.0 standard for SHM systems.
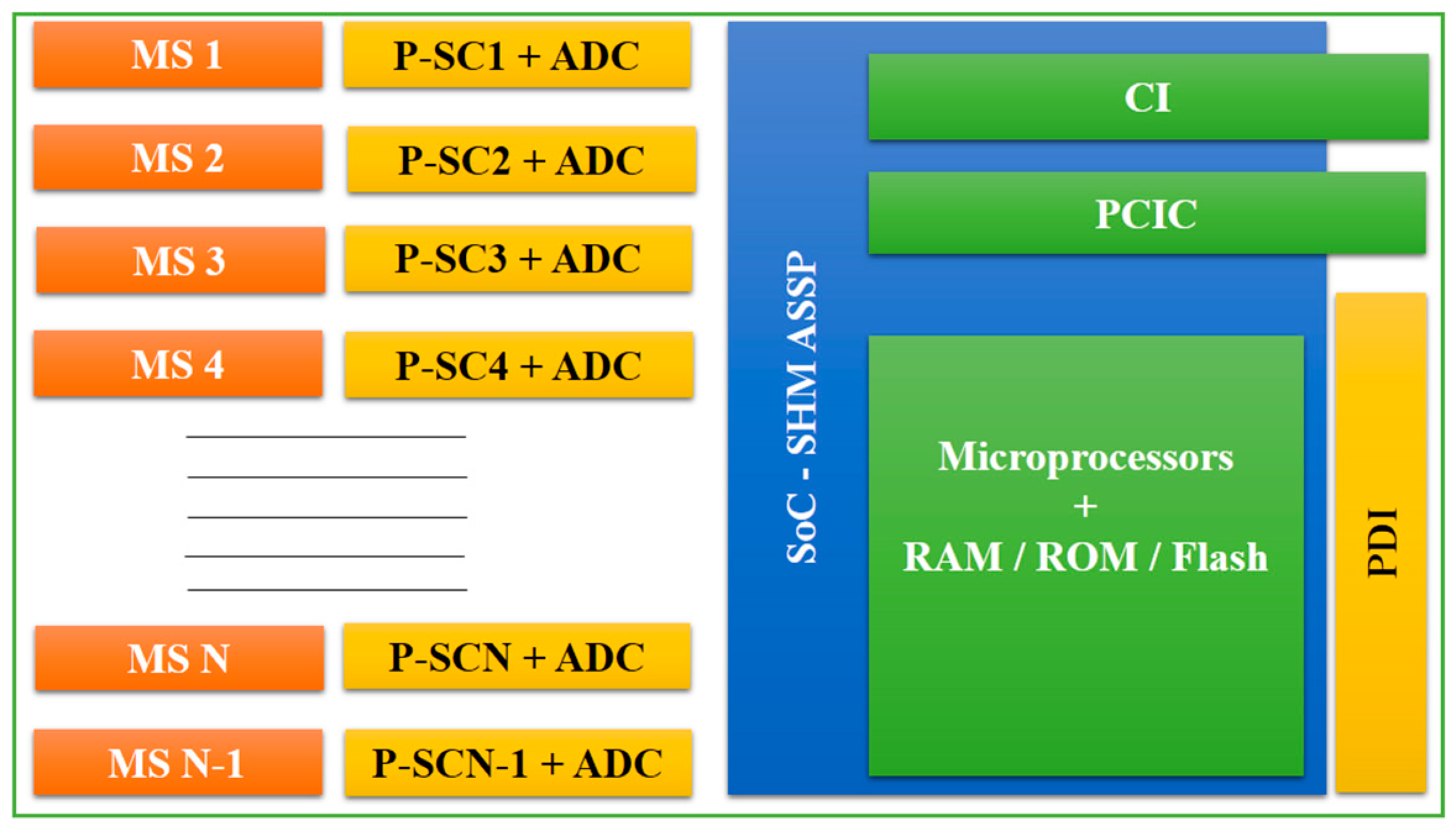
The SHM nodes proposed in this work are UCM coherent framework. The obligation of extreme sensitivity, scalability and sampling frequencies is imposed to achieve the variable data processing constraints for feature extraction techniques, Non-Destructive Testing (NDT) methods, and Non-Destructive Evaluation (NDE) procedures. It is repugnant to hire a new (different) team for detailed SHM parameter assessment every time. A SHM-Application Specific Standard Part (SHM-ASSP) fills the gap of providing the utility of high-resolution data for NDT and NDE assessment procedures.
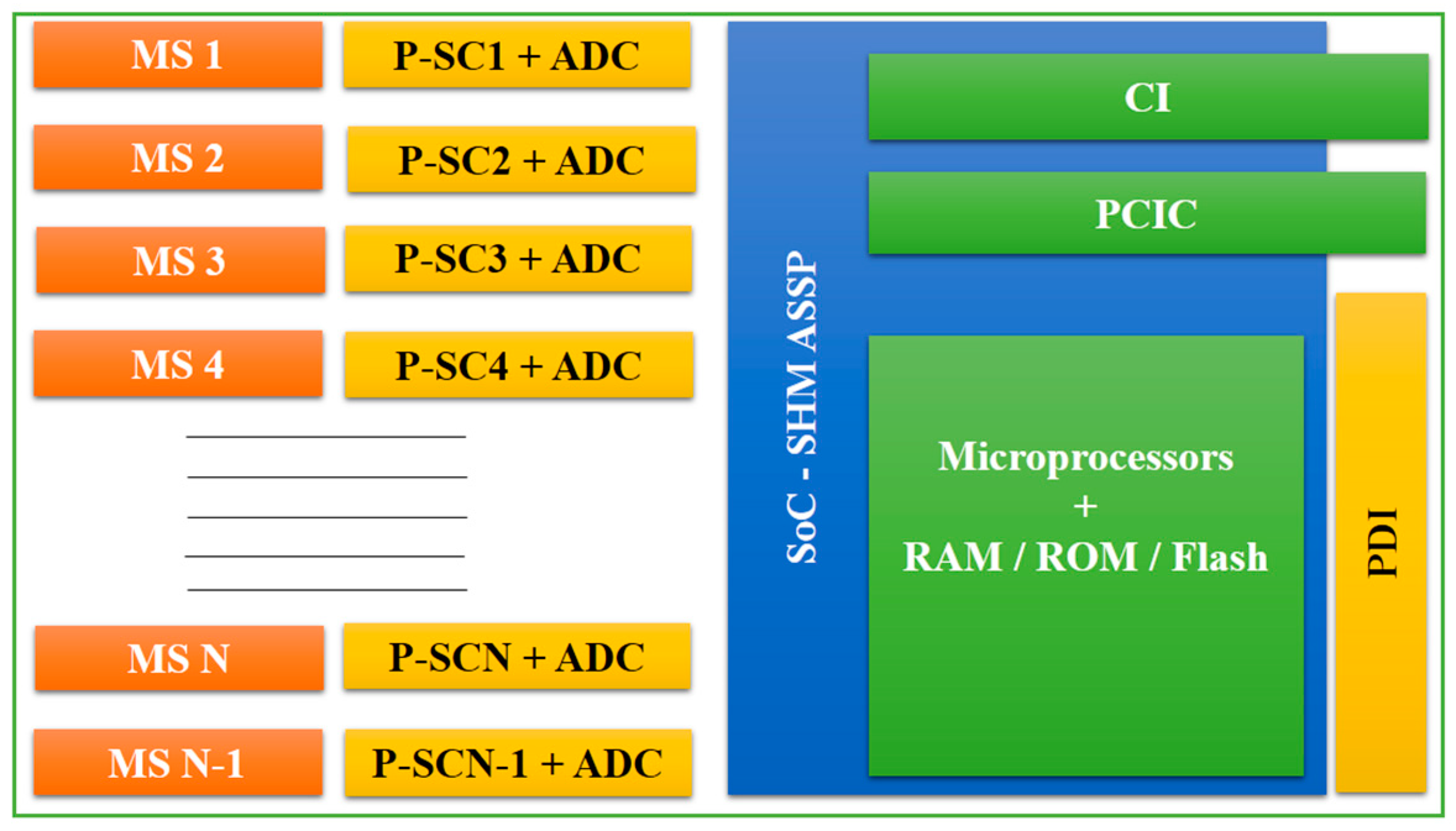
In
Figure 5, a SHM-ASSP ZRC Node is illustrated that includes MEMS Sensors along with Programmable SC (PSC) to make it compatible with monitoring using specialized sensors and Programmable ADC (PADC) that can adopt scaling and range recommendation for particular observational criteria. The SHM-ASSP ZRC nodes proposed in this work need no external instrumentation assistance for SHM operations. ‘STM32F10RBT6’ CPU interfaced with inclinometers sensors are basic elements of nodes.
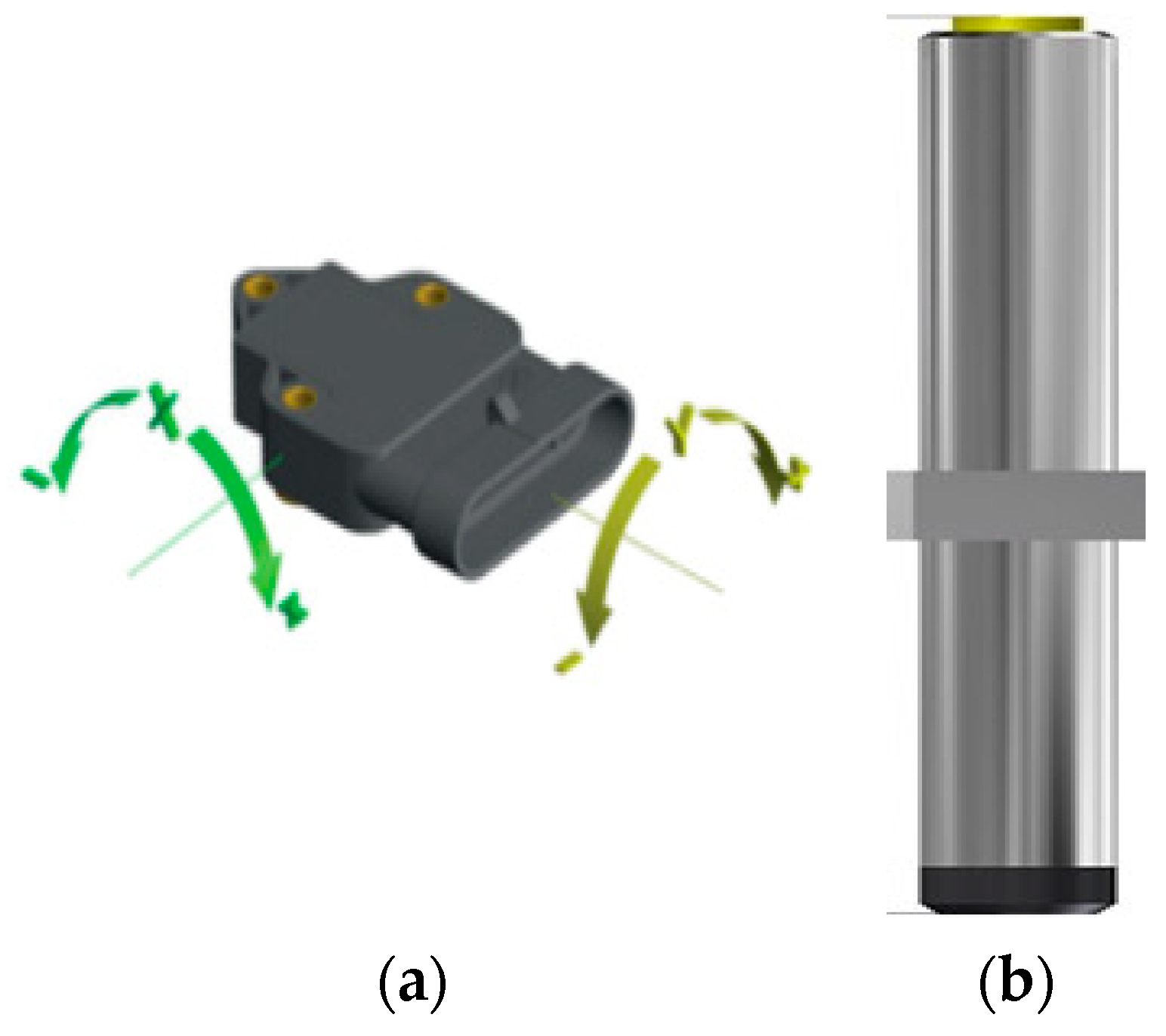
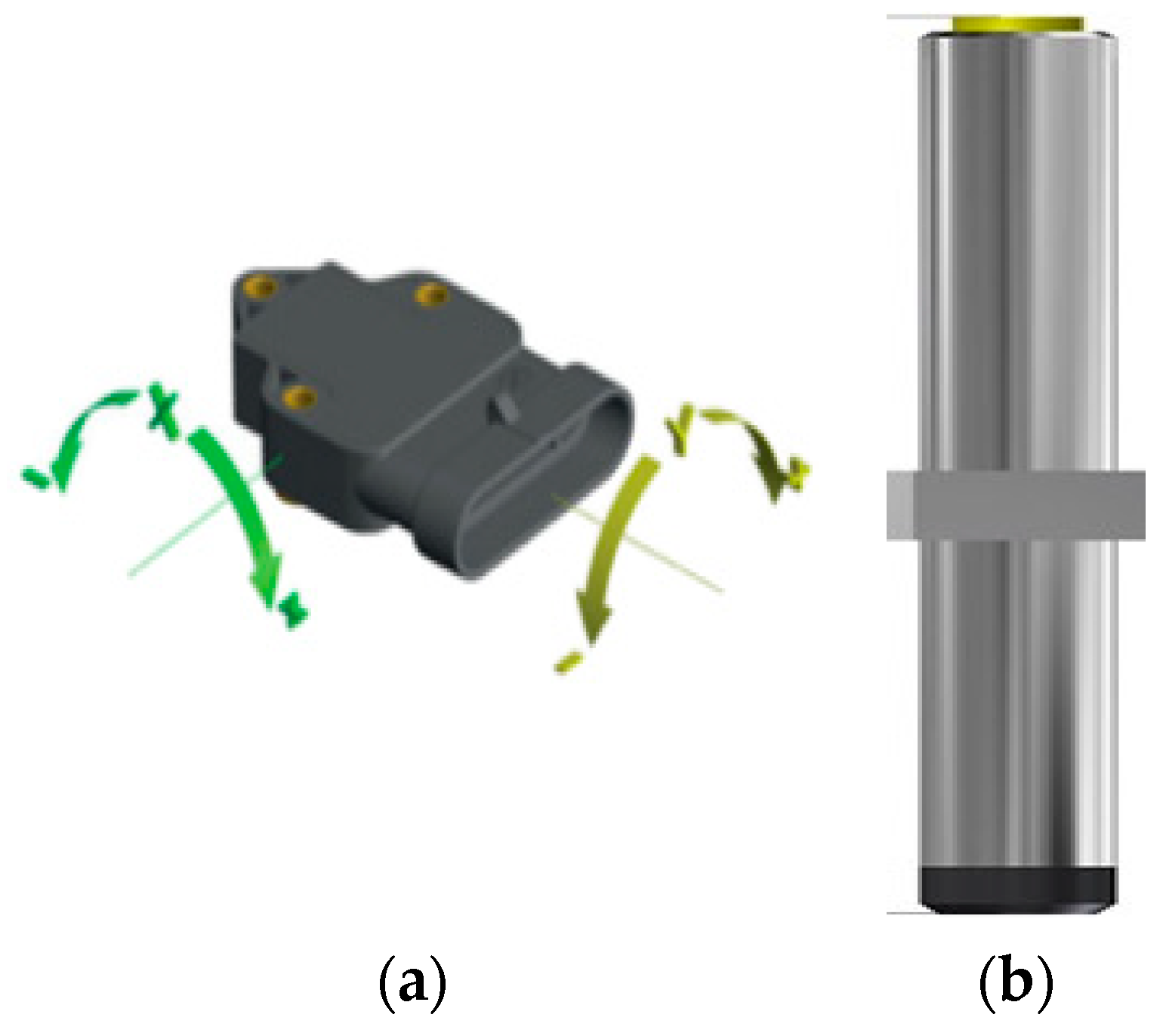
These nodes, which are developed in-house, are shown in
Figure 6 and include:
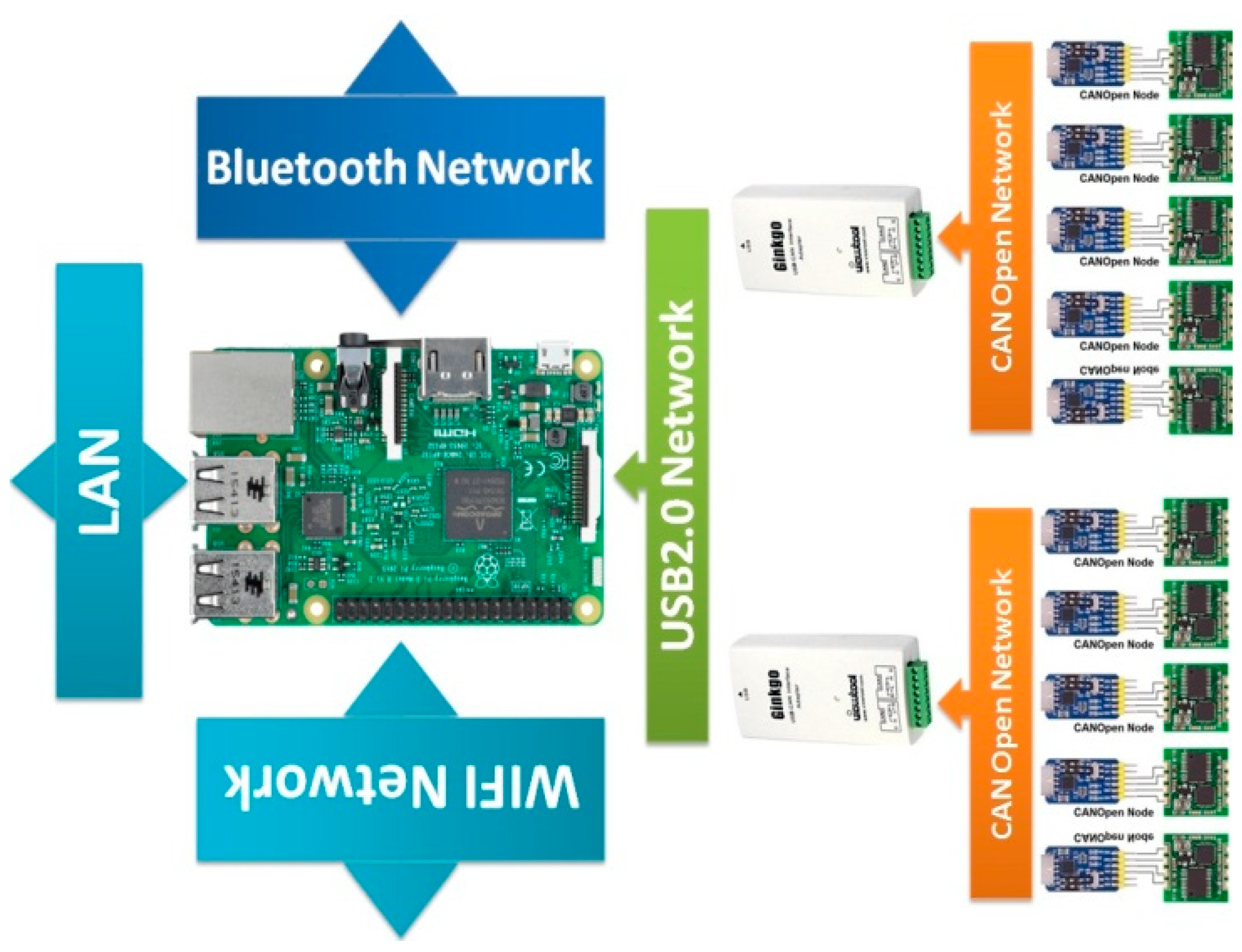
These nodes utilize CANopen industrial protocol paired with CAN-USB adapter to interface with an Out-Surface Board (OSB), in case of underground deployment, which transfers sensors readings wirelessly or wired to a gateway.
It is noteworthy to highlight that these nodes are enhanced with remotely programmable and configurable parameters.
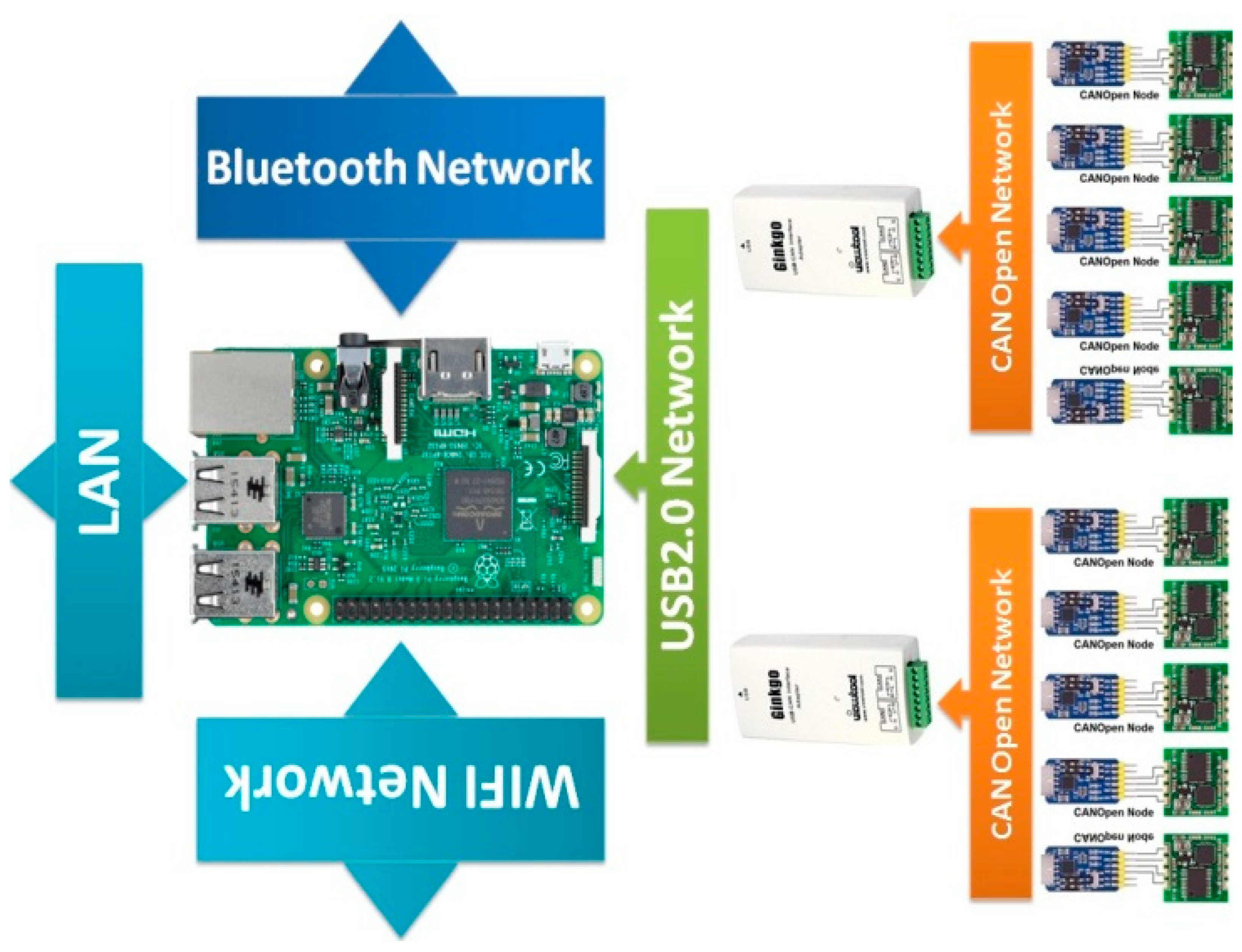
Figure 7 shows an OSB that has a micro expert system with multiple resource-constrained Machine Learning SHM Algorithm.
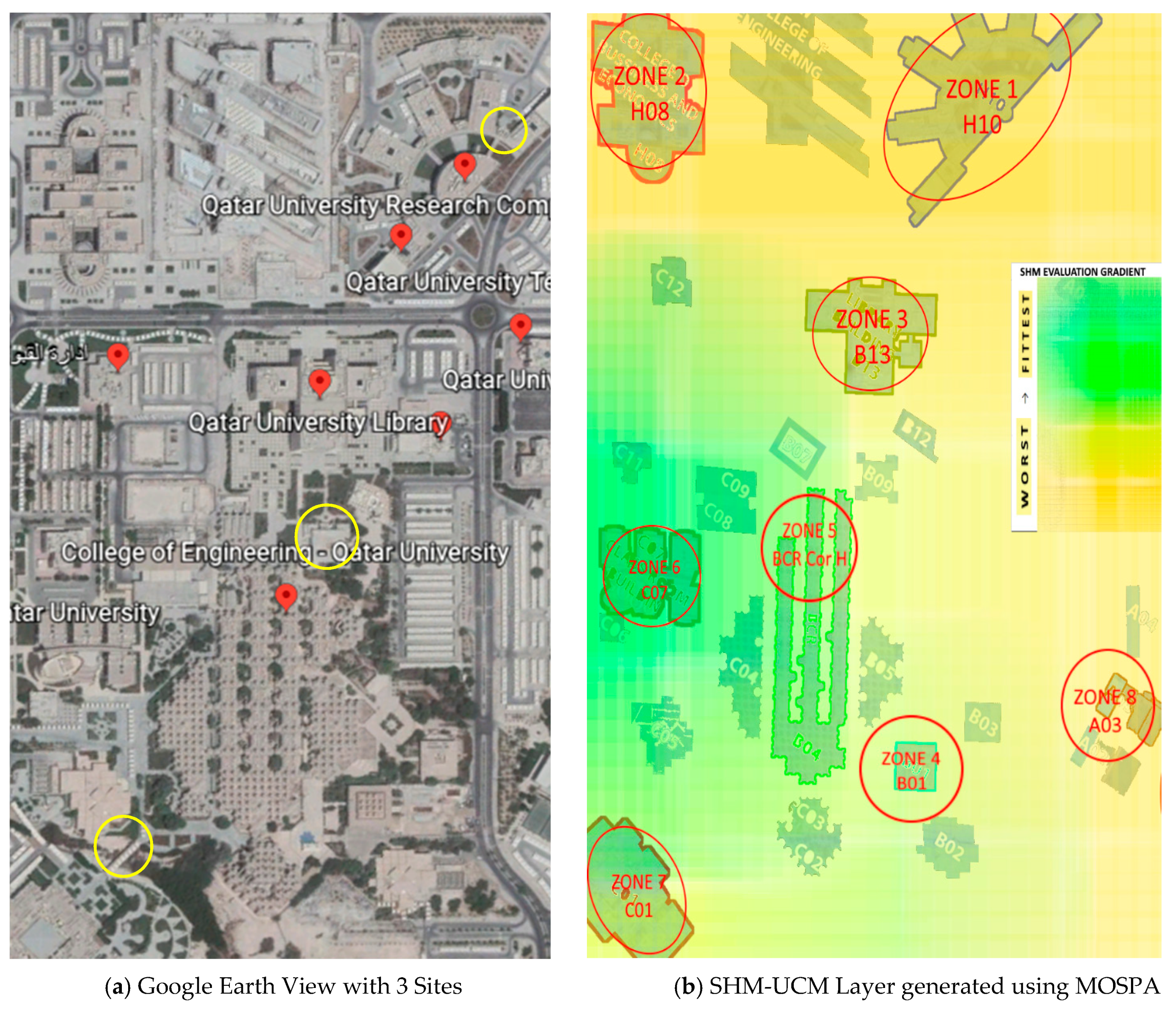
5. Case Study: SHM Systems in Qatar University
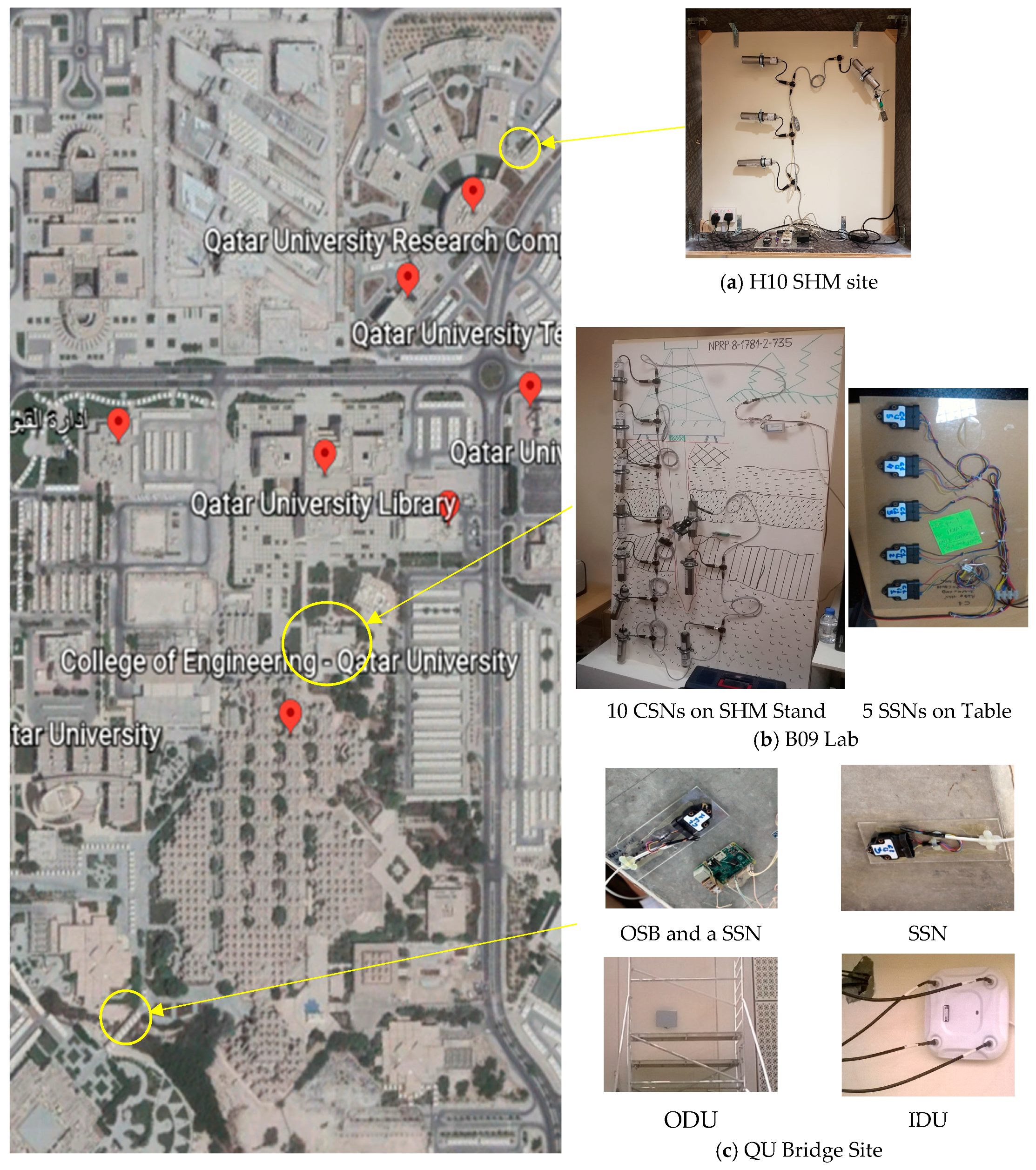
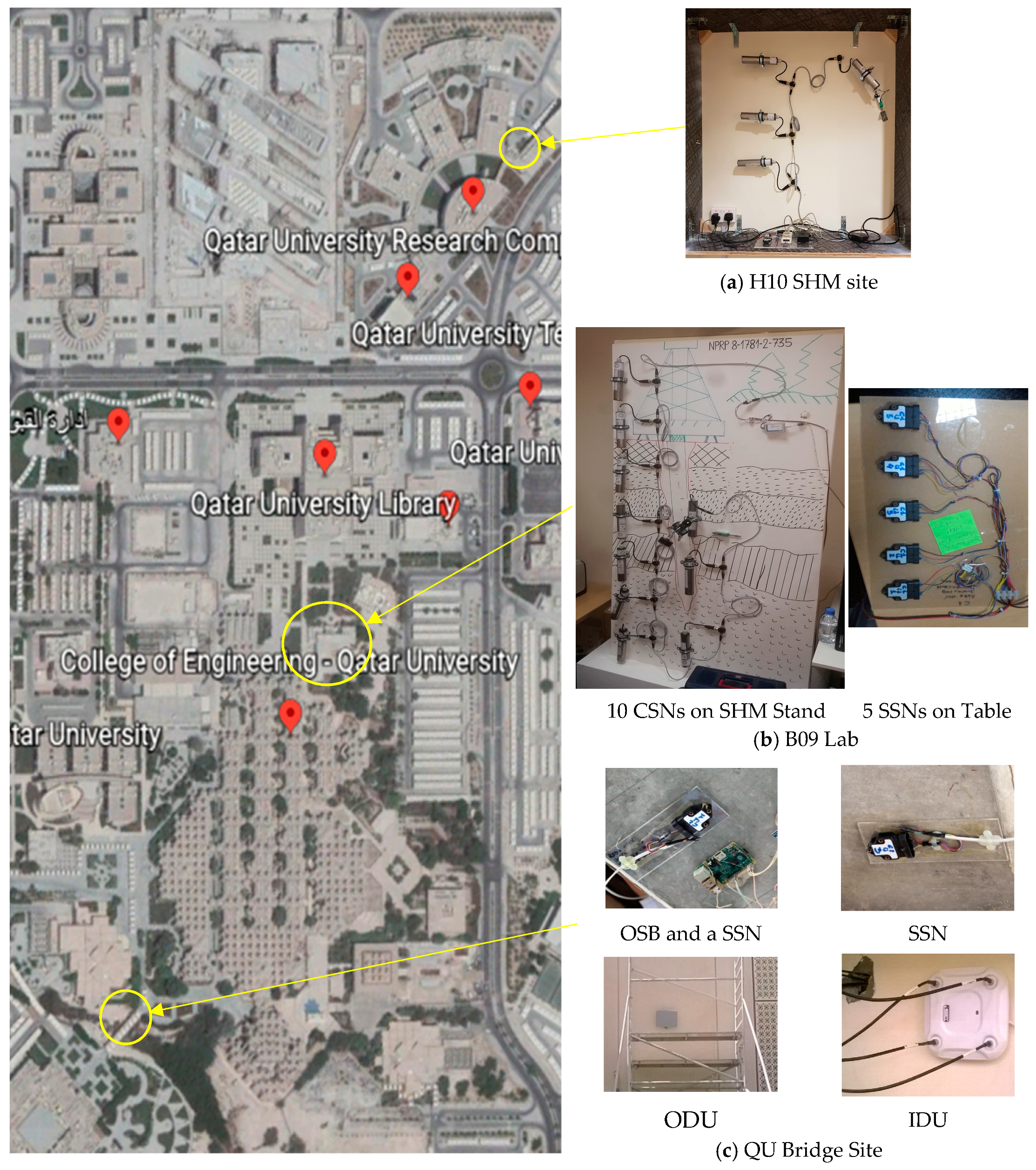
The chosen case study is SHM system prediction for Qatar University (QU) from GAN based SHM-UCM. Three different specification and configuration systems were installed in QU at three 1 km apart unique locations, namely, B09 Lab, QU Bridge and Research Complex H10 with geometric variables monitoring capabilities for 6 months. The QU Bridge has maximum human movement (pedestrians and vehicles), the H10 has construction sites in its vicinity thus incurring various vibrations, and B09 Lab is our benchmarking or standard facility where we have SHM Test bench having eight nodes. The SHM system details for these locations are:
QU bridge SHM Site (SHM-BS) System with 4 SHM-ASSP-ZRC-nodes.
H10 SHM site (SHM-RC) with 4 SHM-ASSP-ZRC-SSNs
B09 Lab site (SHM-LB) with 4 SHM-ASSP ZRC-SSNs and 10 SHM-ASSP-ZRC-CSNs
The entire deployment plan for case study QU is shown in
Figure 9, published in our earlier papers was uploading data to Thingspeak IoT platform by Mathworks. Raspberry Pi 3 is being used as an out-surface board (OSB), i.e., SHM-UCM-TNC. All CSNs and SSNs are SHM-UCM-ZRCs nodes. The 2 km+ WiFi range extenders from CISCO are indoor data unit (IDU) and outdoor data unit (ODU). This system encompasses practical limitations that would be inherently considered in our UCM.
Common problems that are generally faced in generic/conventional SHM deployments, and are overcome in this work are:
For every site, one has to click on the IoT links to explore, which is not feasible in urban scale solutions in cases where we might have 10,000+ buildings.
The 15 s lag in every variable on ThingSpeak is a real hurdle in real-time geo-analytics.
No real-time algorithm with data processing capabilities above 100 MB/s should be used in public cloud based solutions, as well as urban scale geo-informatics applications.
Even an organizational level SHM is impossible in existing scenario, i.e., totally impossible at urban scale where there are more than 200 organizations.
An application specific web-based private cloud SHM platform with the geo-analytics capabilities has so far been absent.
An algorithmic scalable sensor based GIS layer generation mechanism has so far been missing.
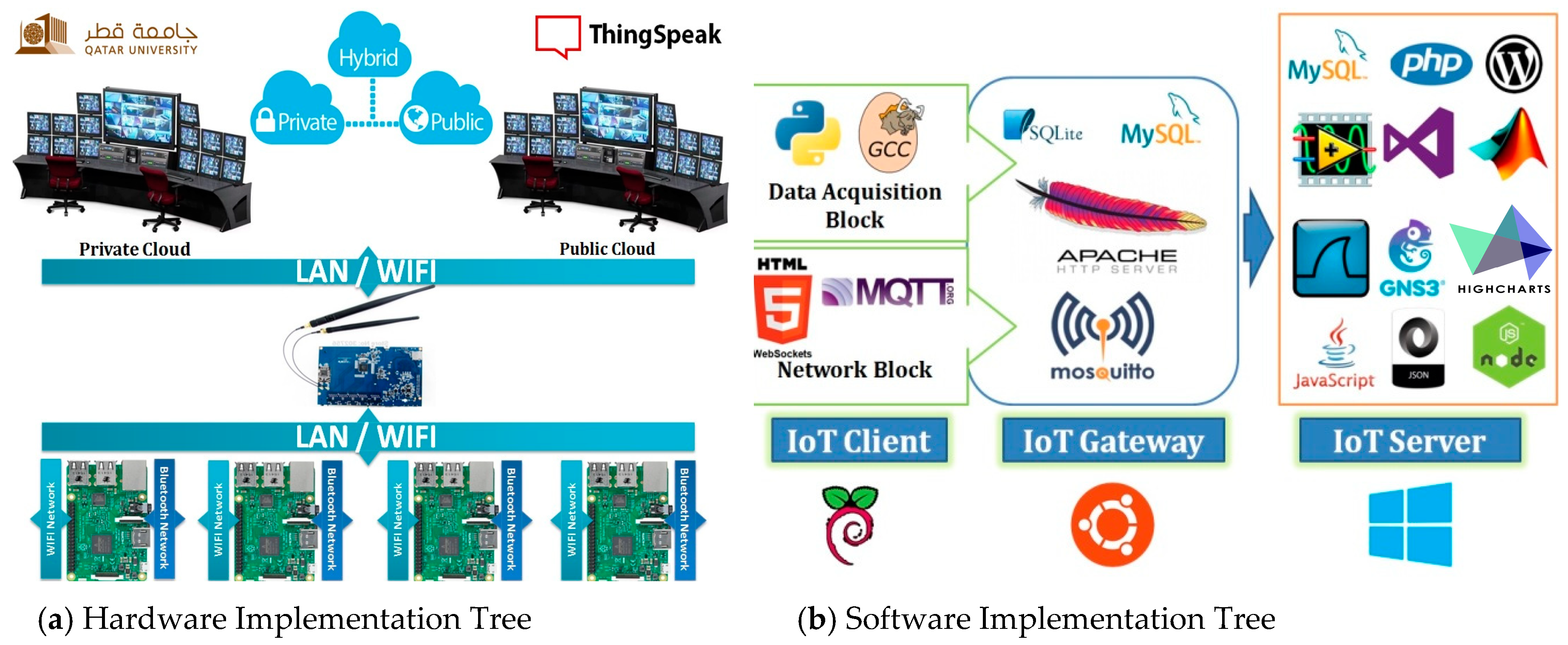
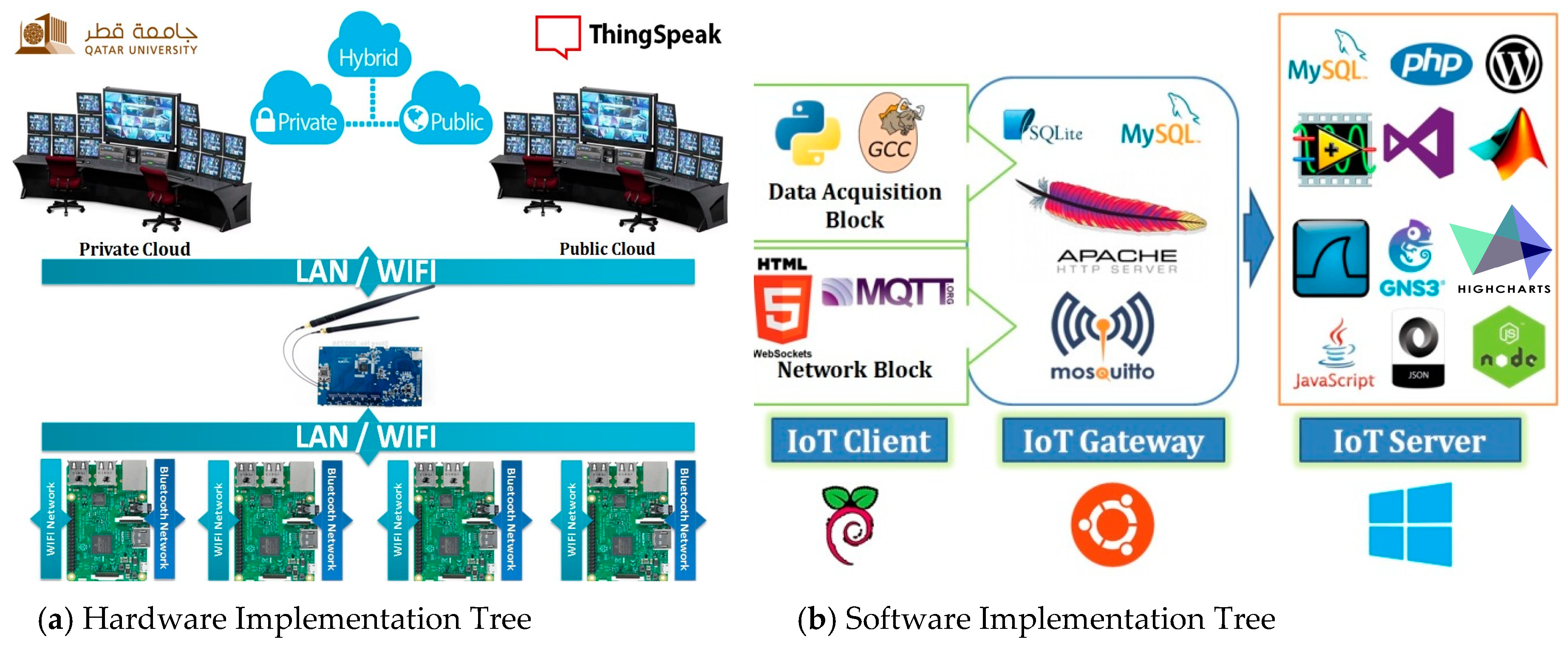
A comprehensive software and hardware architecture to implement the SHM-UCM is given in
Figure 10. In
Figure 10a, there are four Raspberry Pis (OSB) and Banana Pi R1 gateway serving as SHM-UCM-TNCs. Dell PowerEdge 28XX Series Rack Servers are used SHM-UCM Servers. In
Figure 10b, OSBs are the IoT clients, Banana Pi R1 is the IoT gateway and Dell PowerEdge Servers are having the LAMP Server.
6. Results and Discussion
Three sites are pooling data to ThingSpeaks IoT platform with the problems mentioned in thecase study and that are being displayed in the figures below. In this work, the geometric nodes data was used i.e., The B09-Lab test bench is sending to data to LabView just for comparison as well as the ThingSpeak IoT and private cloud SHM-UCM Server with MOSPA. The QU Bridge and H10 sites sending data to ThingSpeak and well as private cloud SHM-UCM Server with MOSPA. This work was using 80,000 samples from three sites, as mentioned, but now all the processing is live and highly data efficient and robust. Below are shown the ThingSpeak IoT plots that are just for reference.
Figure 11 shows that all sites are working fine and pooling data immaculately. The challenge for MOSPA is the low data rate (i.e., 15 s) for single variable update, which is visible from
Figure 11b. This is being highlighted in Thingspeak reference manual. This work uses JSON published over the SHM-UCM and stored as a DB file at the server. The above results show that real-time geo-analytics is slow when using the Thinkgspeak platform.
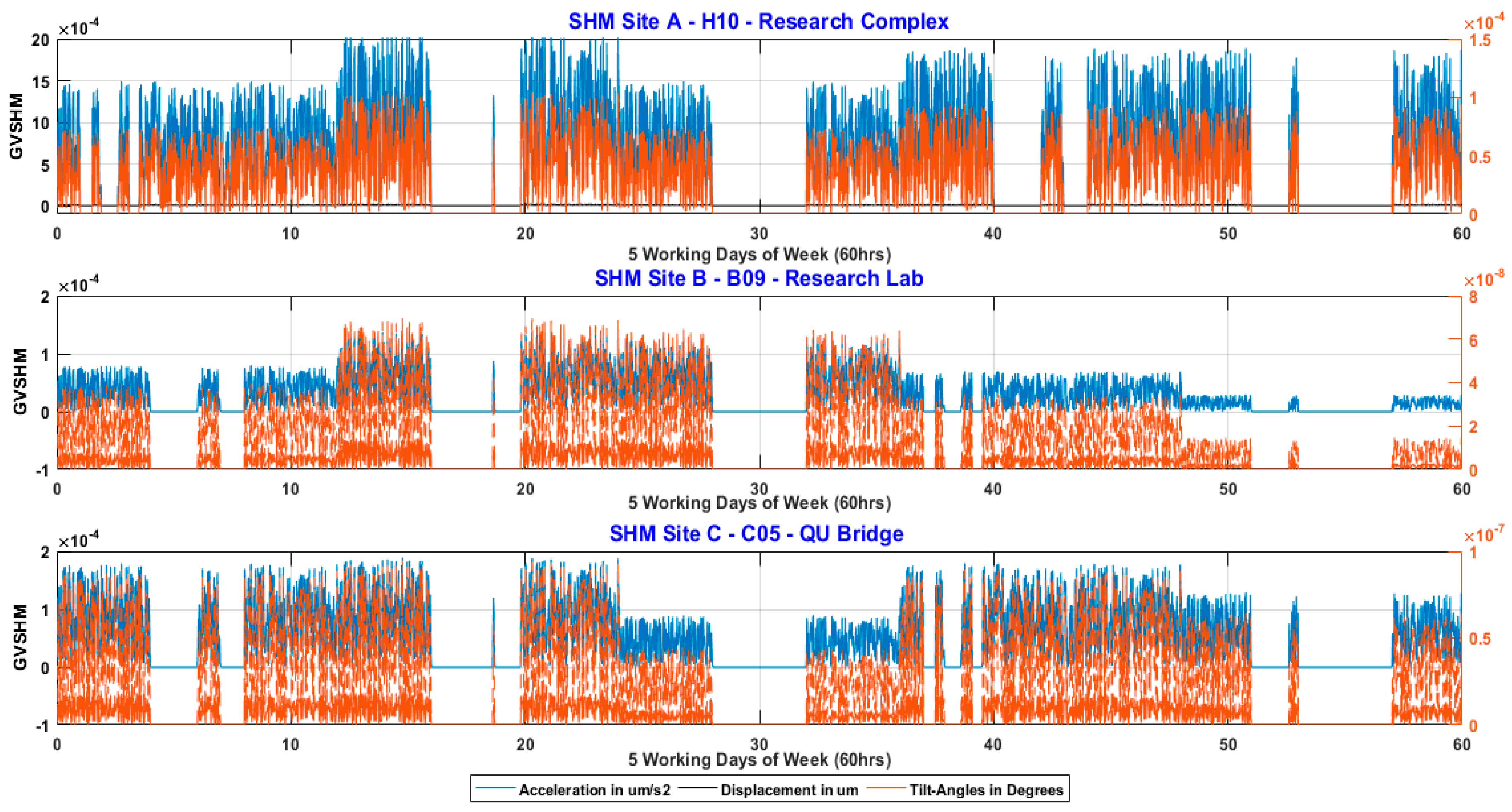
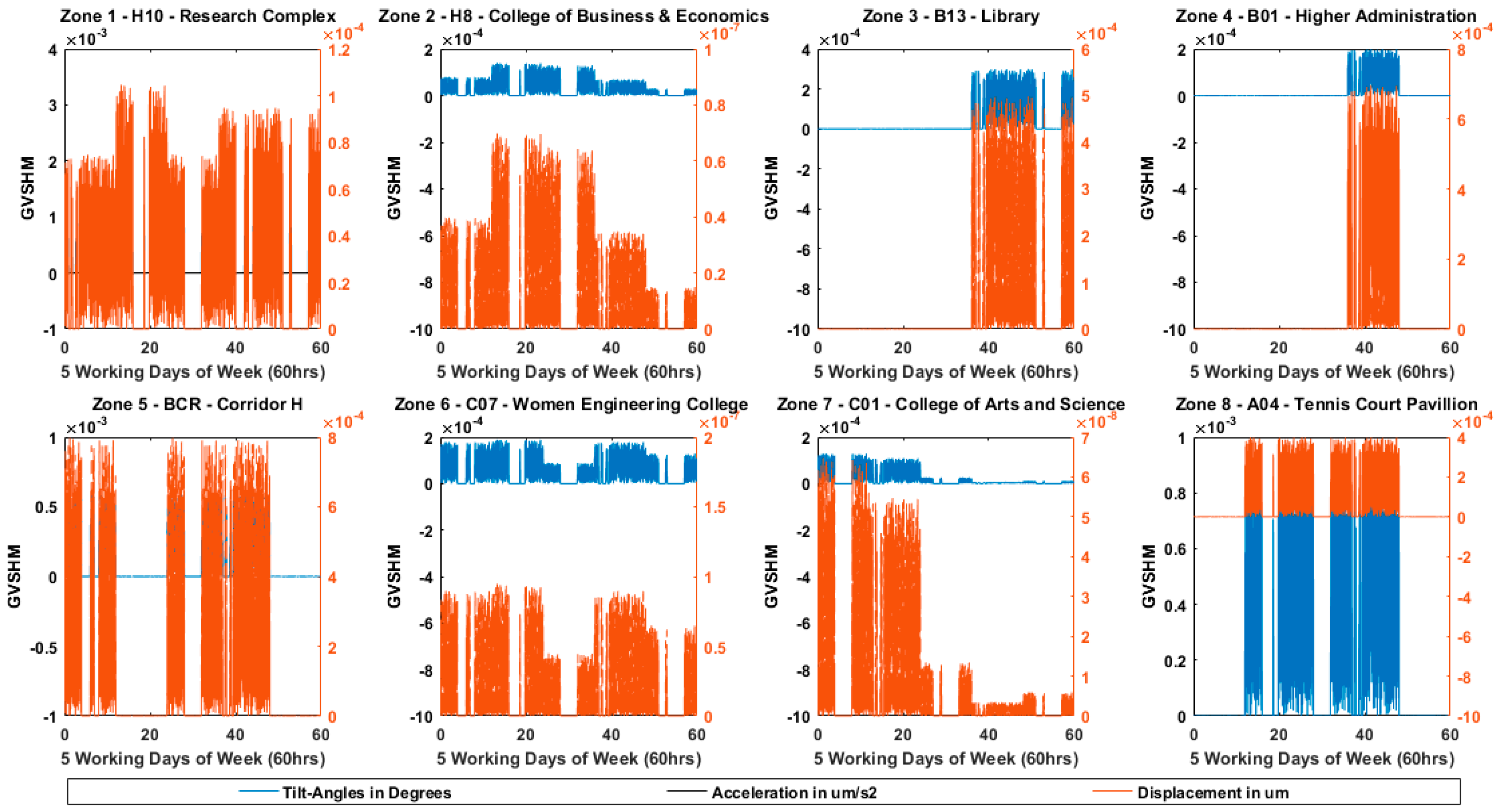
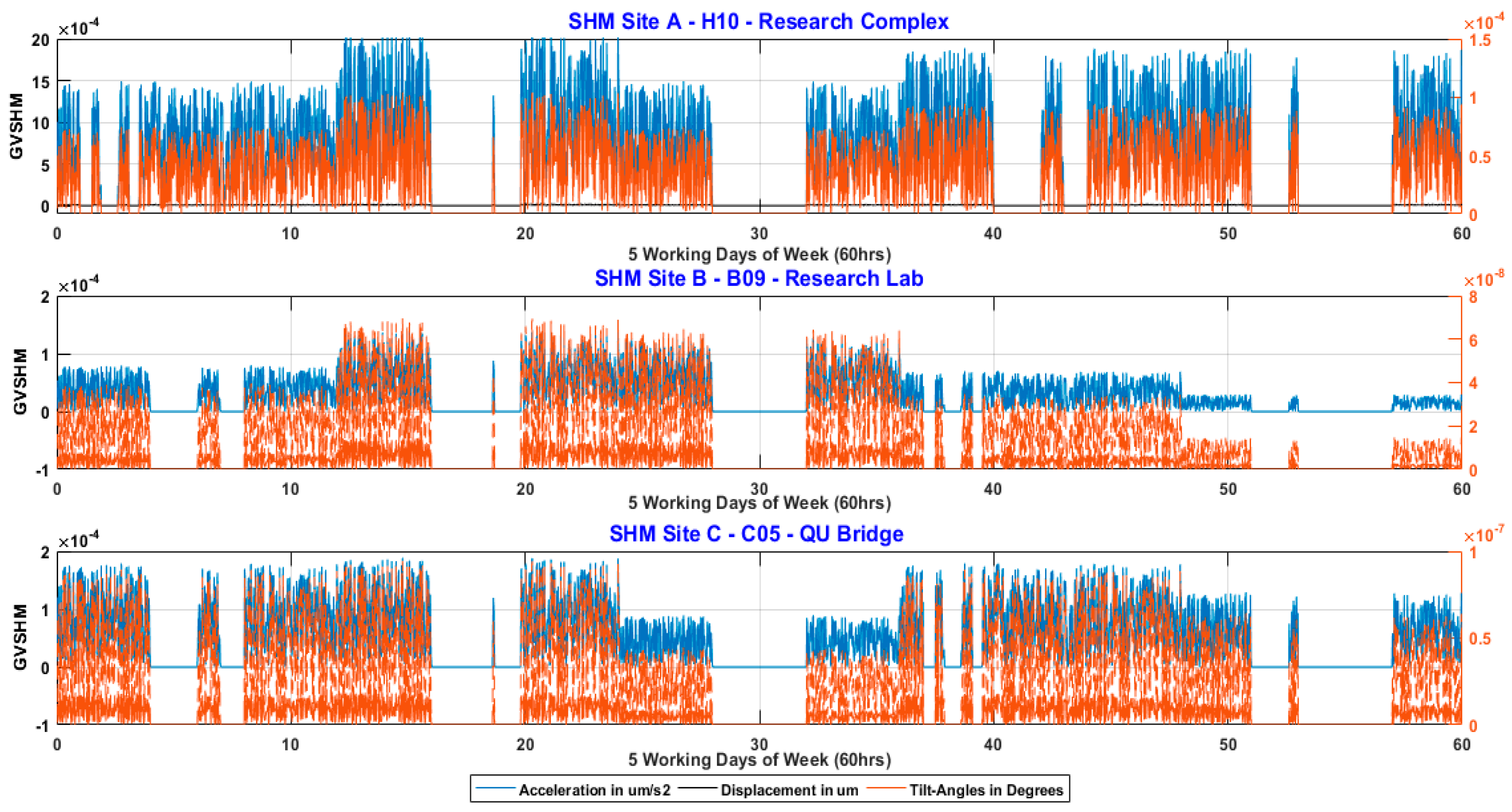
We did the same experiment and collected data using our private Cloud platform. The results are shown in
Figure 12, in which the GV
SHM plot of tilt angles, accelerometers and displacement sensors are visible with a constant trend of acceleration and displacement overlapping each other. This would indicate that the structures are extremely safe. The results of MOSPA are sequential in nature. First computation is runtime geometrical variables time-series trend. The DB data for three sites shows as stationarity in nature.
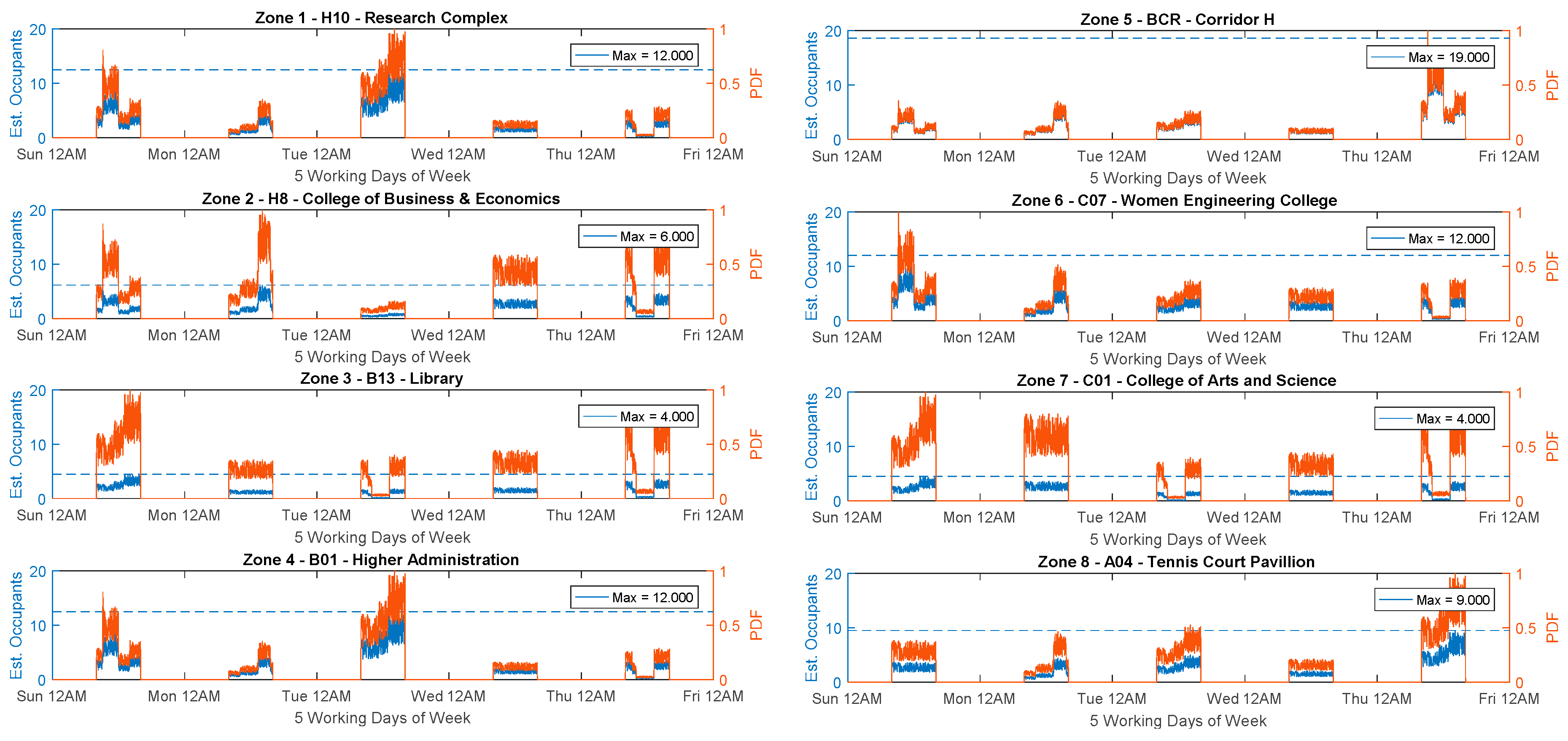
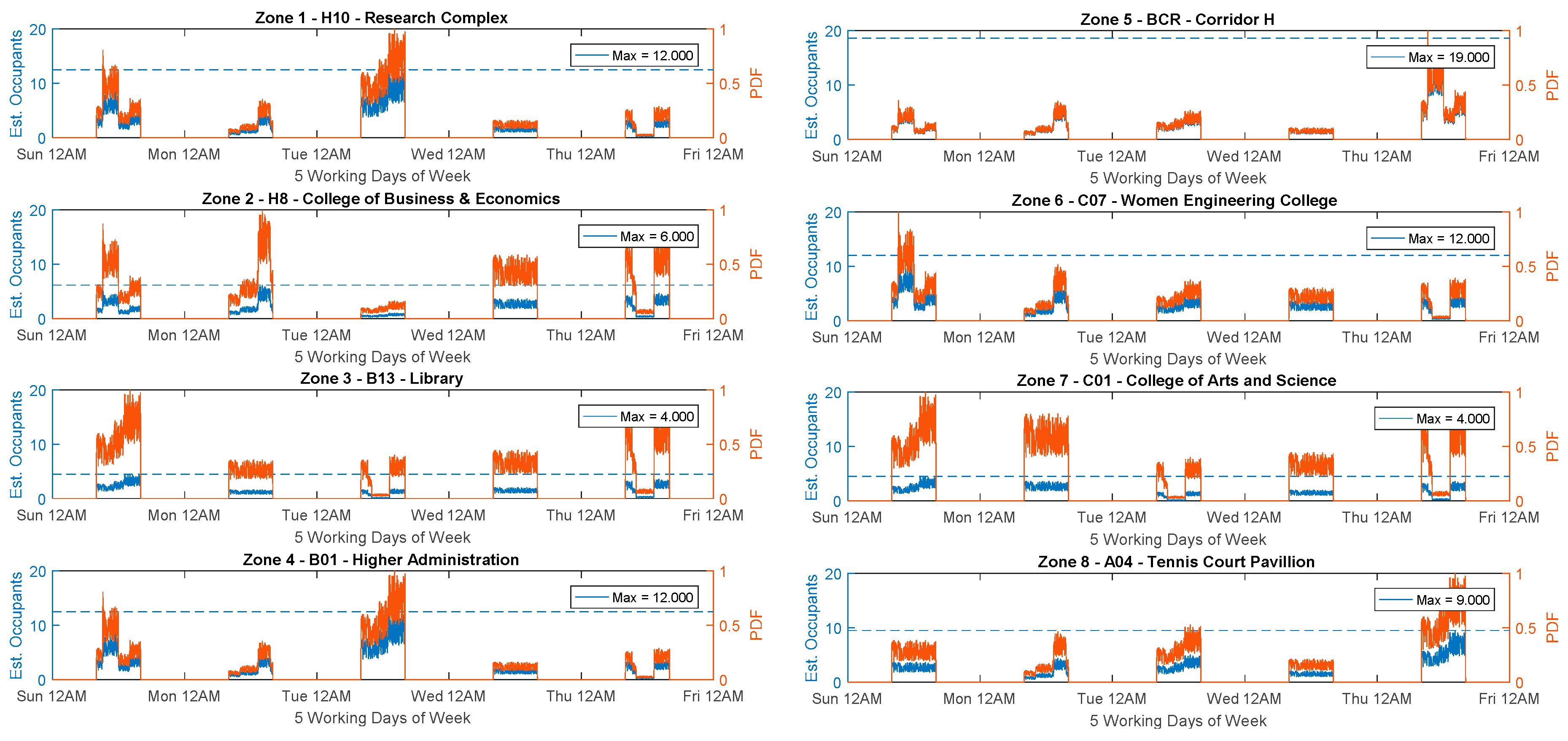
By using actual occupancy that is based on daily attendance and vibrations measured by SHM three sites, MOSPA created eight zones based on occupancy. The Variable Occupancy Model (VoM) map is based on the probability density function of occupancy given in Equation (4). The PDF in (4) forecasted the occupancy by adopting the historical data of , , and , as discussed before.
Figure 13 shows the simulation results obtained from the PDF in Equation (4) by GAN selected zones based on the estimated number of occupants per week (five working days). The blue line is the actual number of occupants present sensed from MAC addresses of PCs and smart phones and red line shows the predicted or expected occupants. The number of occupants must not exceed the rated payload, i.e., 50% of rated payload for a building in any zone. The results show that maximum occupancy was observed in Zone 5: BCR Corridor H (19 persons), Zone 1: H10 Research Complex (12 persons) Zone 4: B01 (12 persons), and Zone 6: C07 (12 persons).
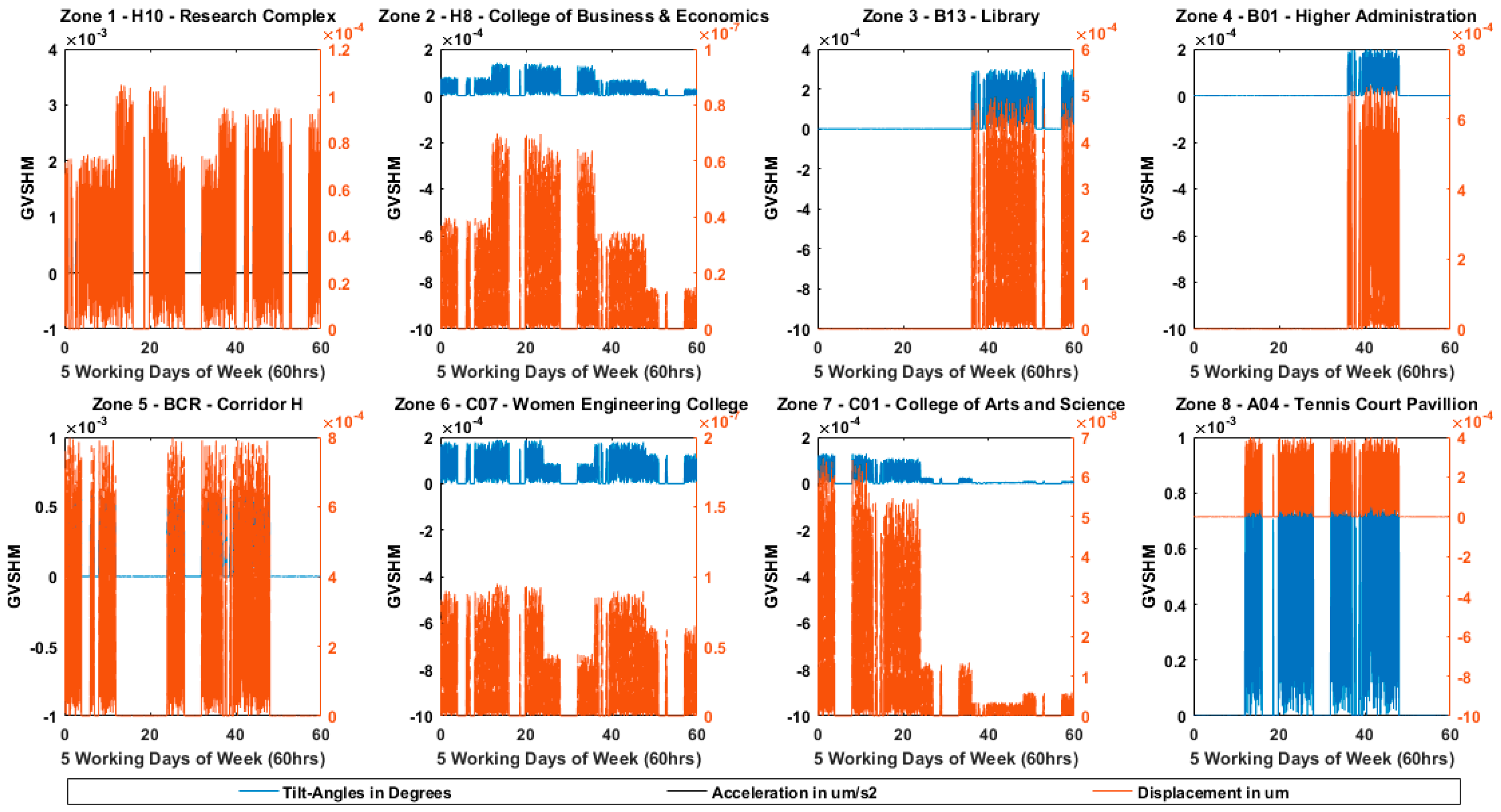
In
Figure 14, MOSPA utilized the 8 zones created using the real attendance and predicted attendance to generate the expected 8 zones recommended for GV
SHM, RSV
SHM and PL
SHM. variables where the installation of SHM can improve the safety of occupants given in
Figure 15.
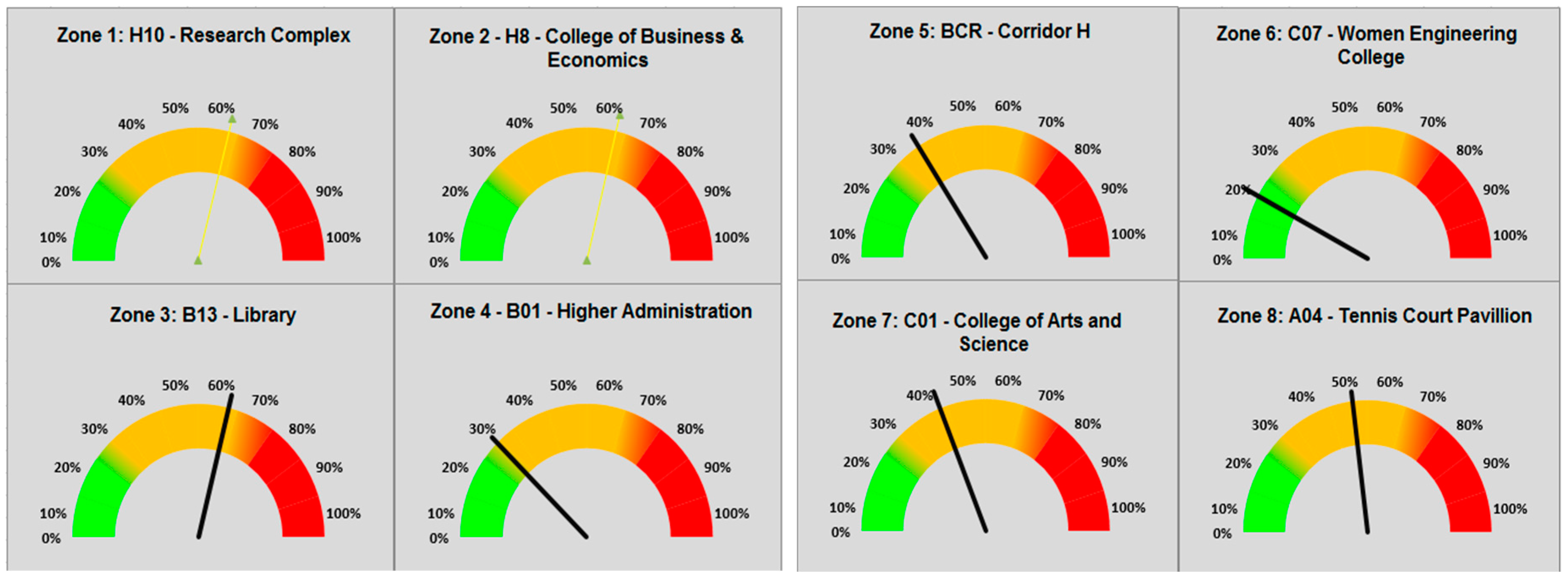
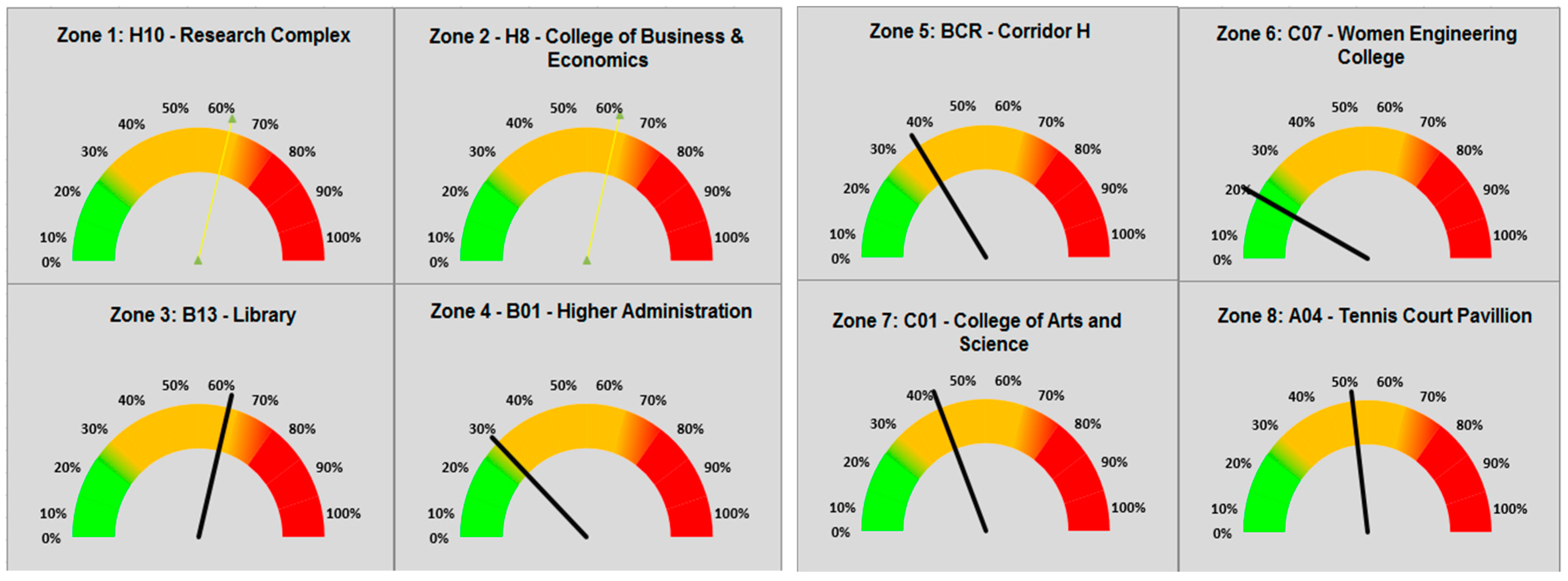
Figure 15 shows cumulative fitness percentage of occupancy in structures from Zone 1 to 8 obtained by the estimated SHM system results (from
Figure 16). Two colors of needles are visible in
Figure 16, where the golden ones show maximum overshoots or SHM with maximum utilization of structure, whereas the black ones show that below 50% of sensors in SHM have almost constant values. The plots in Figure 18 for predicted cost are very realistic since indeed both H10 and H08 has a maximum flow of occupants that should result in maximum vibration, the maximum change in pressure, humidity, and temperature.
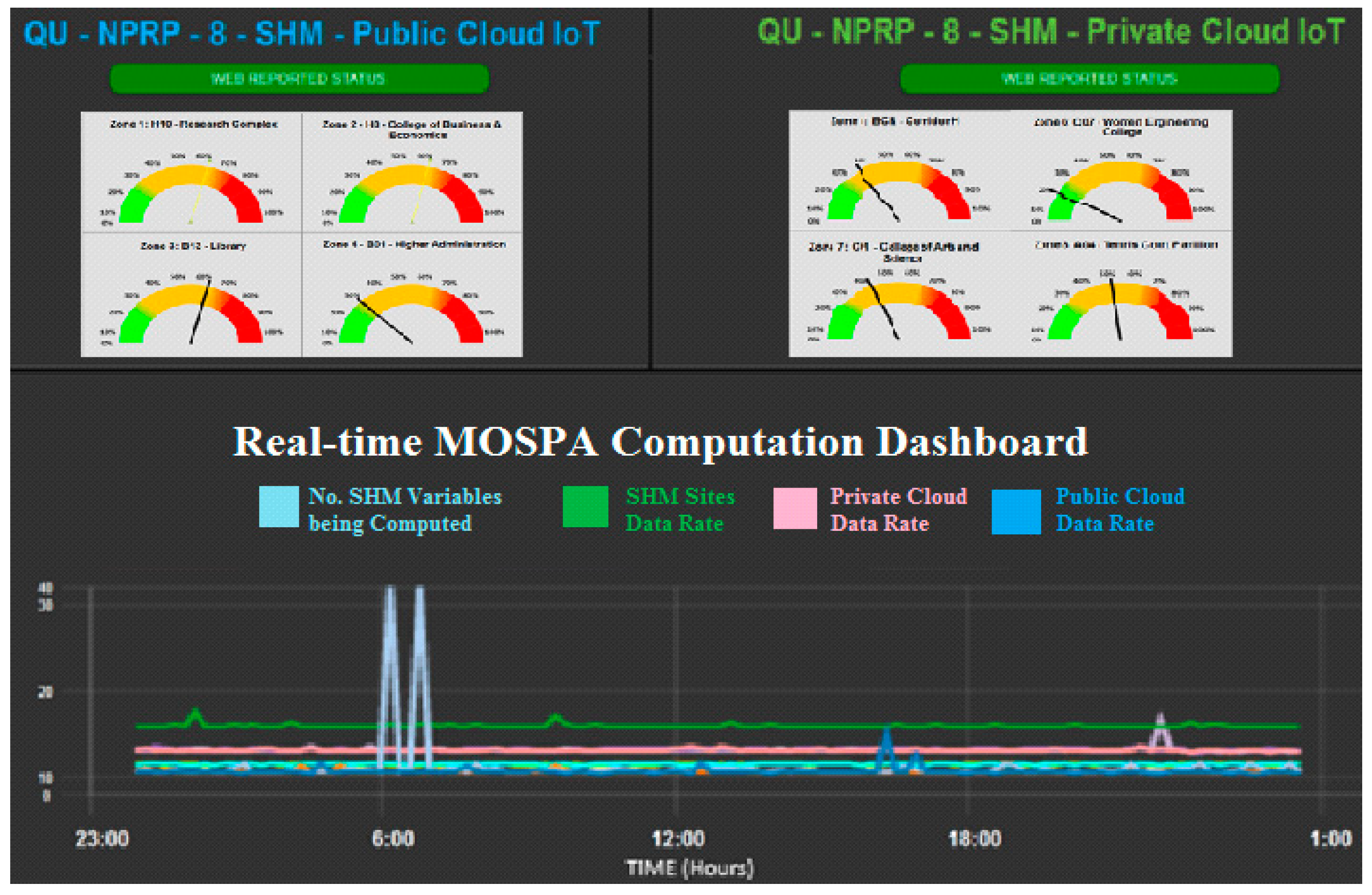
The overall dashboard with noticeable suitability for SHM-UCM in urban scale applications can be observed in
Figure 16. For urban scale geo-analytics the constraint for abstract results is important. One can access the details for further investigation in utility computing cloud for troubleshooting and systems detailing purposes. In
Figure 17, desired goal achieved for an urban scale SHM based geo-informative system can be seen from line plot that bottlenecks have been reduced by only transmitting the abstract computation to the public cloud for optimized GAN traffic payloads.
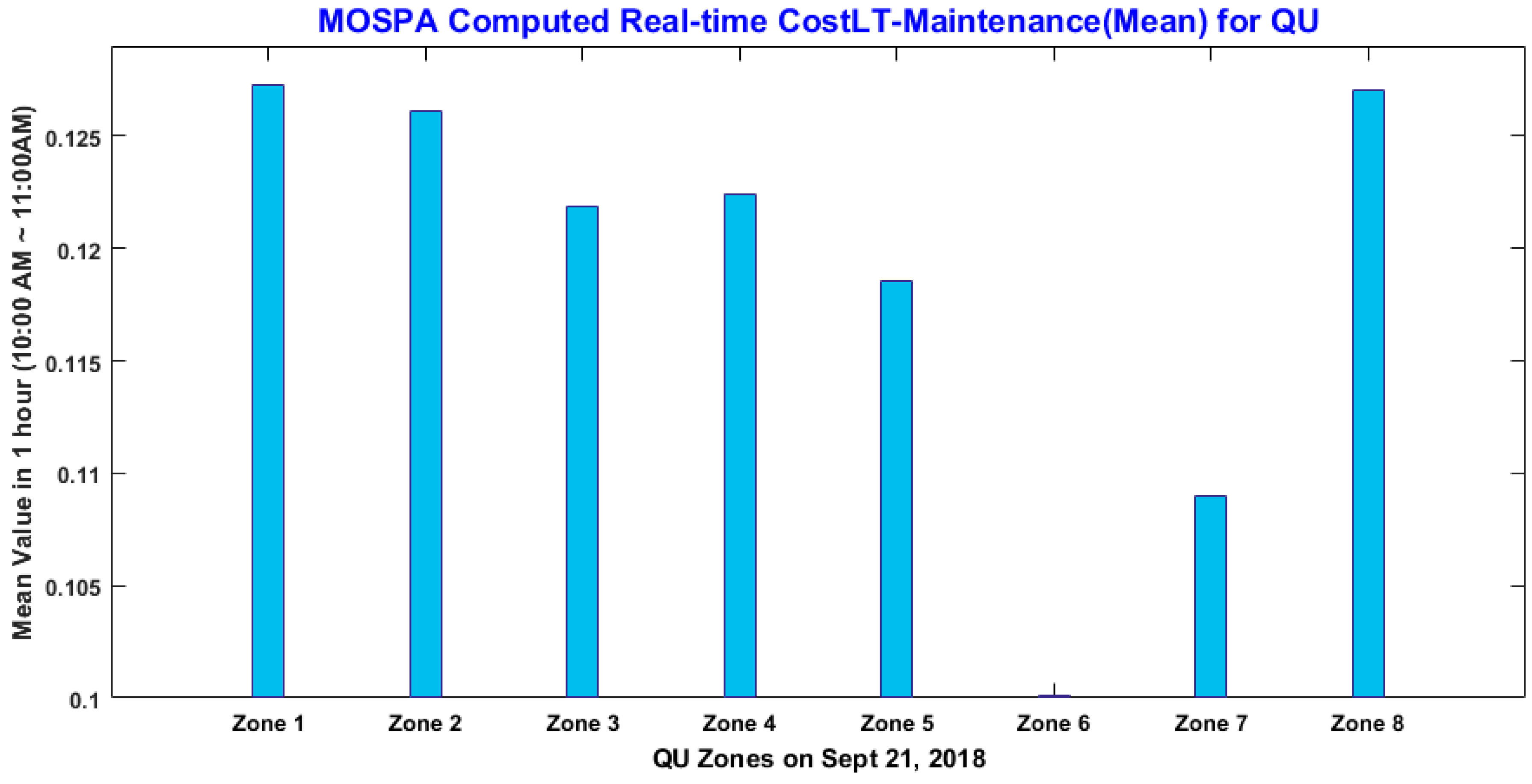
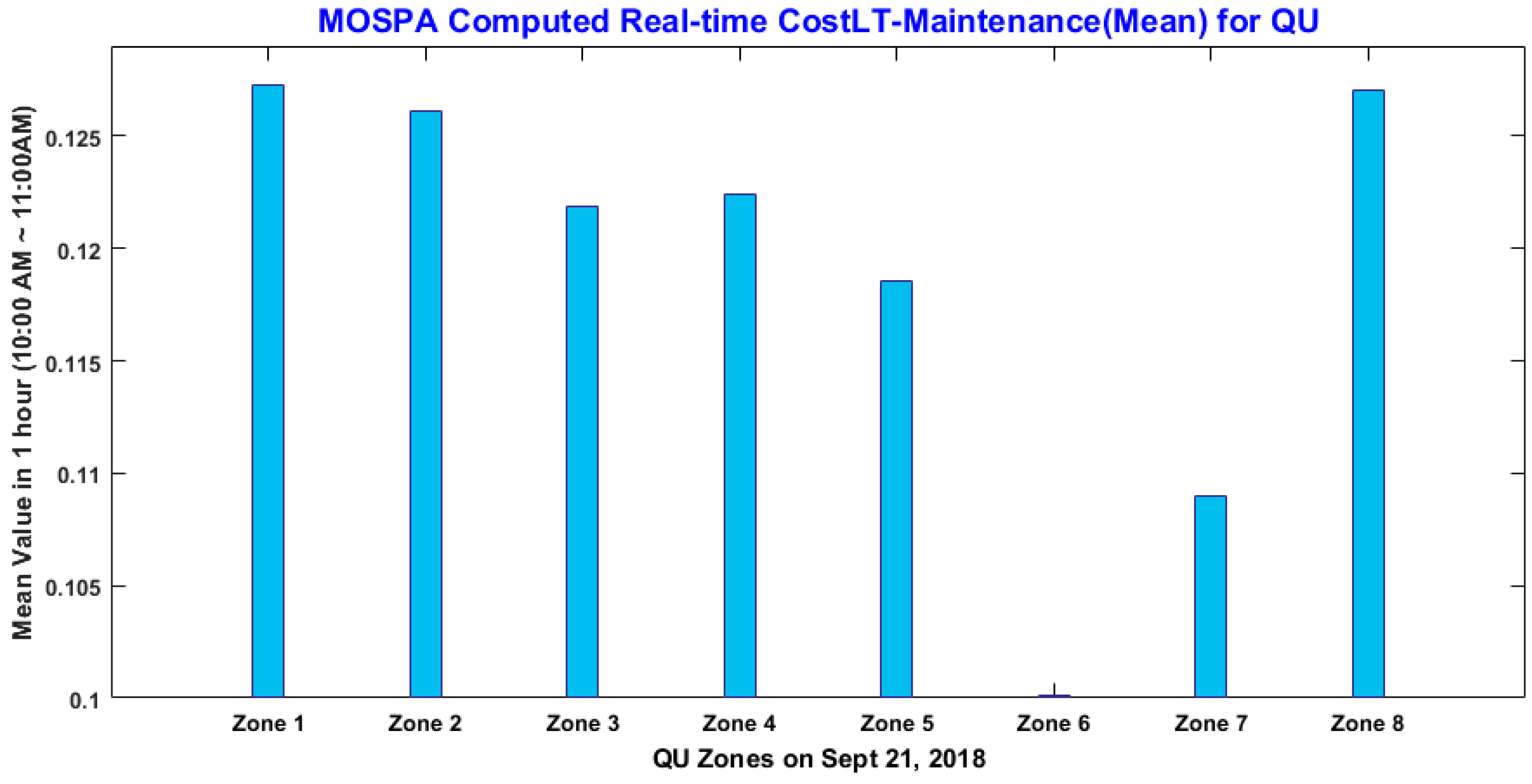
In
Figure 17, the output of Equation (17) is displayed, as computed on 21 September 2018. This data is a paramount metric for building management to study and act if needs be. The range of cost is between magnitude zero and one. The magnitude zero means no maintenance is required and the structure is adequately fit. The magnitude one means totally damaged structure, i.e., unrepairable. The zero value will be displayed as ambient green and one will be ambient brown or dust-colored in geo-plot at urban scale GIS layer below.
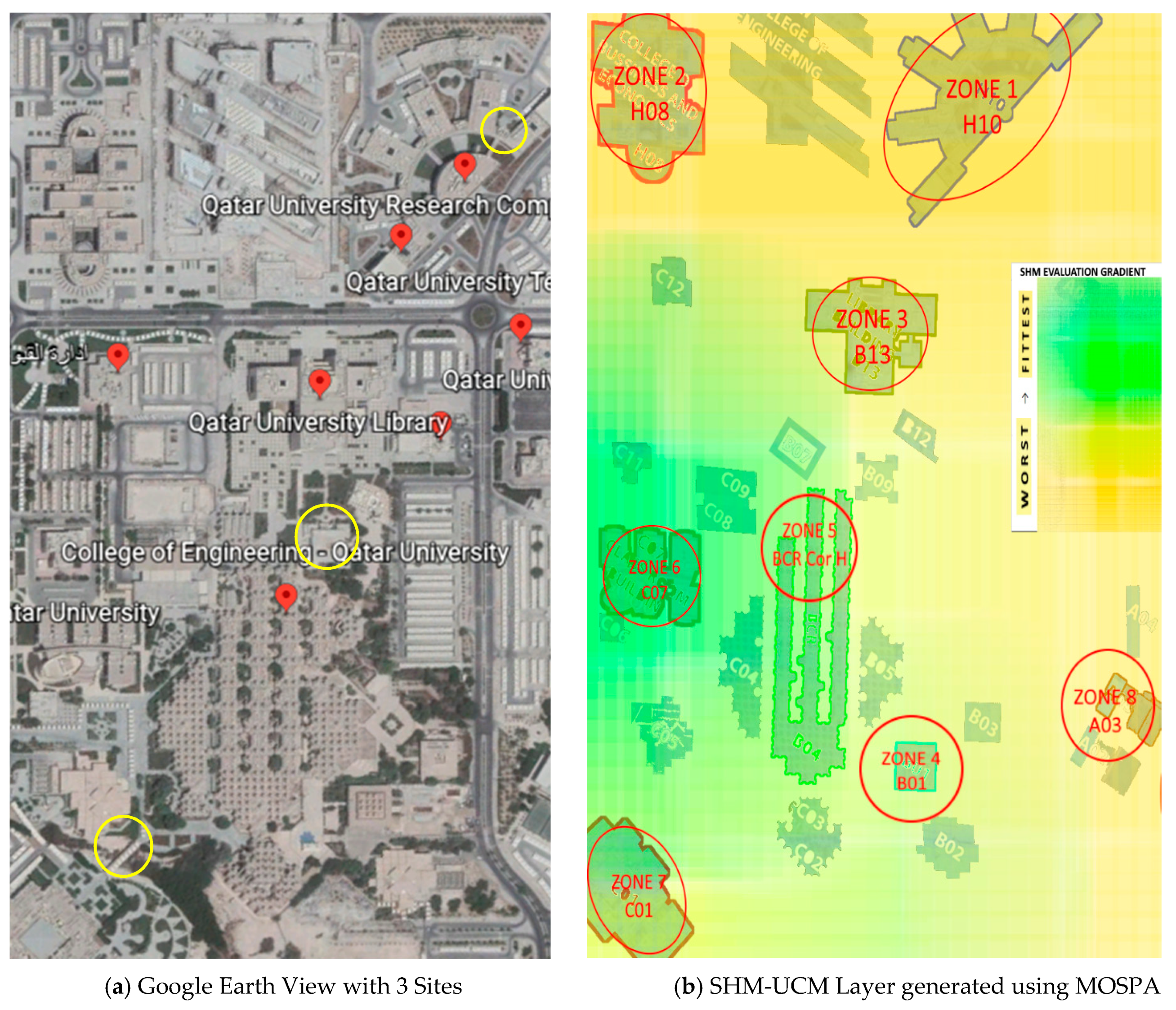
In
Figure 18, the final output geo-plot is presented in a visual yet user-friendly interface as a result from an automated decision-making map for helping building management. The interpolation of magnitudes from
Figure 18 has assisted in the generation of SHM-UCM GAN plot by MOSPA or SHM-UCM GIS layer for QU geo-spatial patch.
Figure 18 shows the resulting MOSPA geo-plot that can be used for dynamic re-planning of SHM. The dark yellow reading presents unfit conditions for structure health, whereas the dark green indicates the fittest building (refer to
Figure 9 for comparison). The unfit condition can be due to several reasons such as critical historical building status or higher occupancy. The proposed SHM-UCM model, working over the GAN satellite-based system, can be utilized as a tool for an in-depth survey of geographical areas, as well as disaster management.
 ,
, 



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}