Making the Invisible Visible—Strategies for Visualizing Underground Infrastructures in Immersive Environments

 , , , ,
, , , , 
Abstract
1. Introduction
2. Related Work
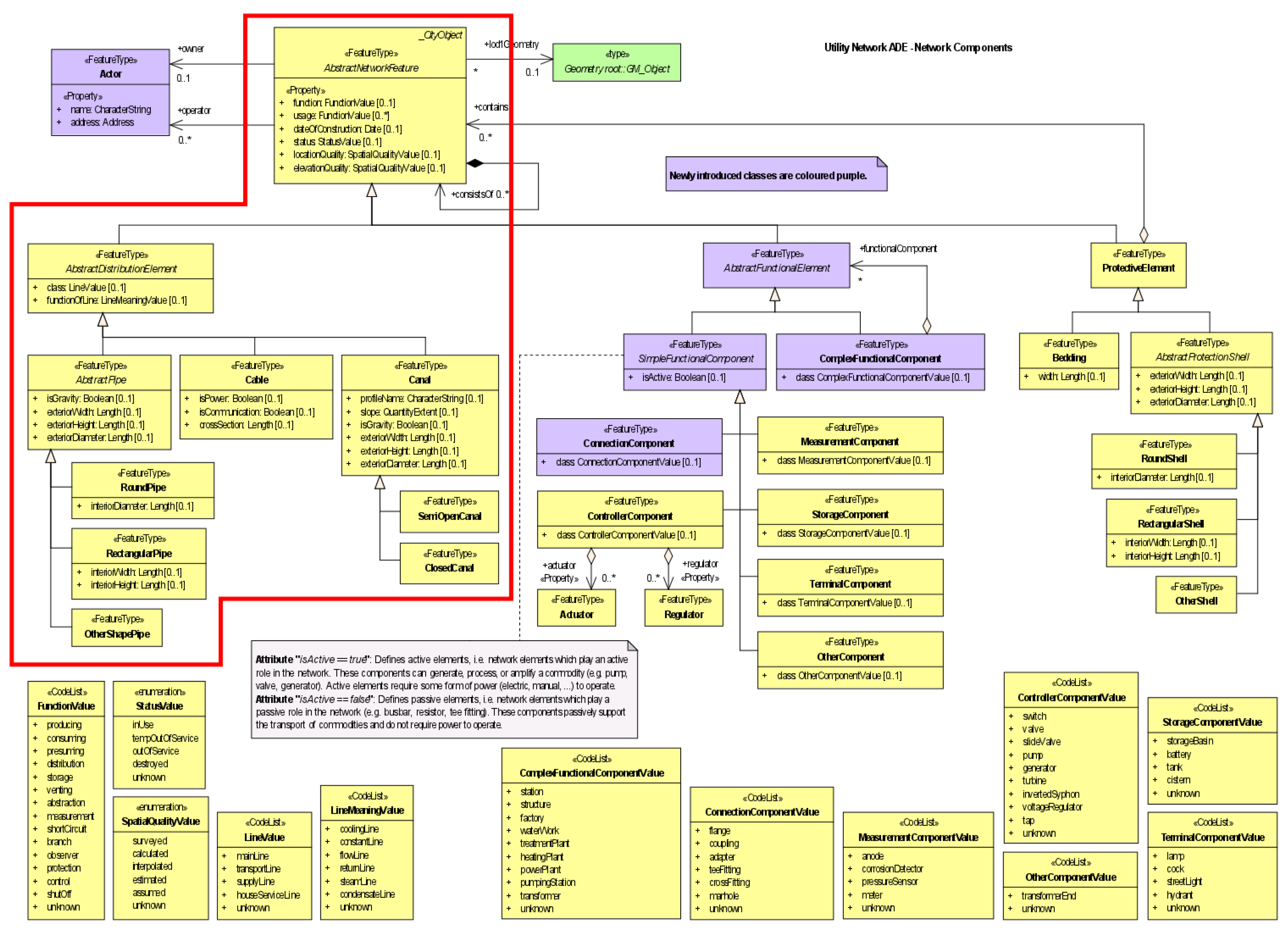
3. Data Infrastructure for Representing Subsurface Features
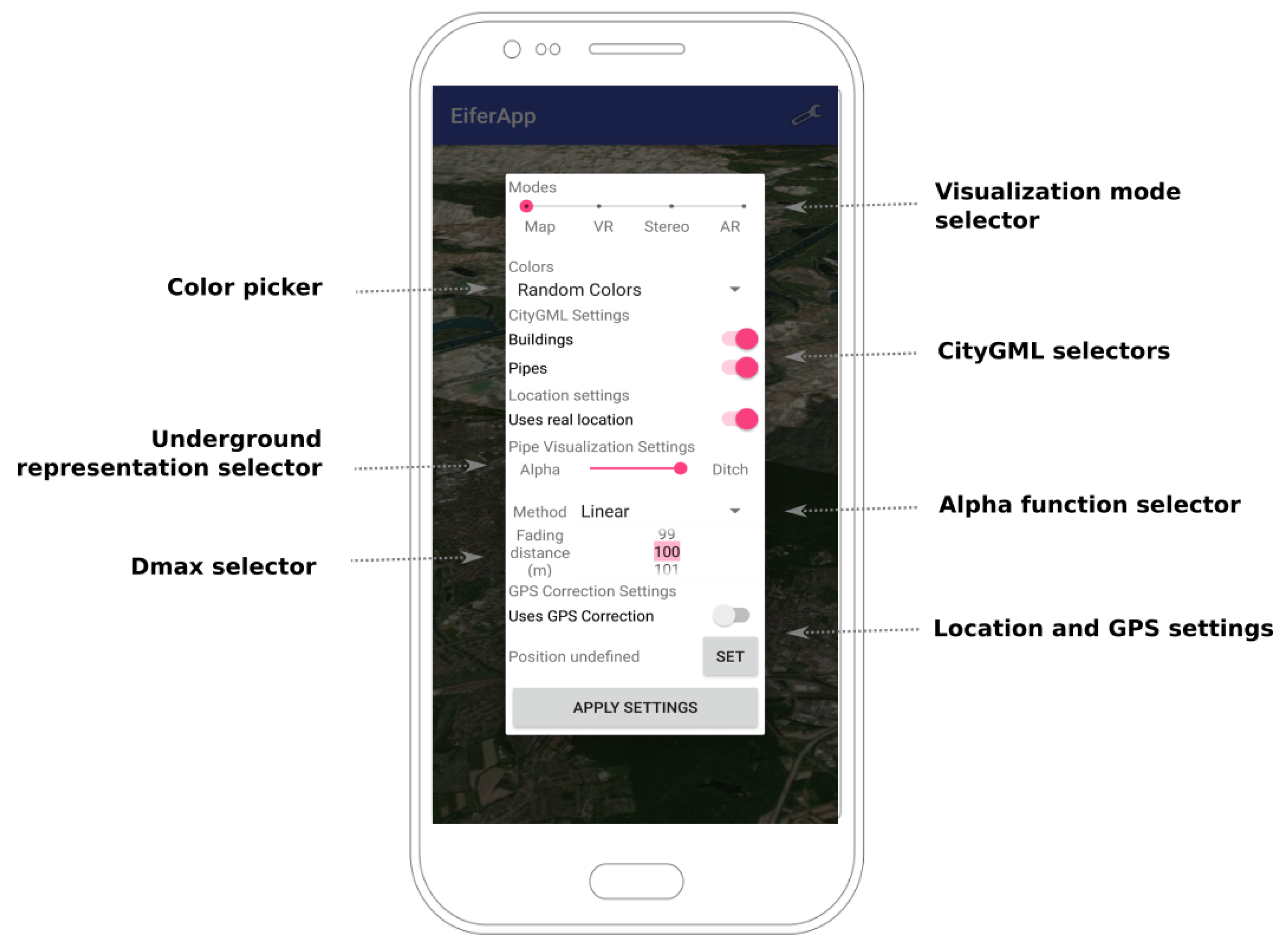
4. Implementation of the MultiVis Mobile Application
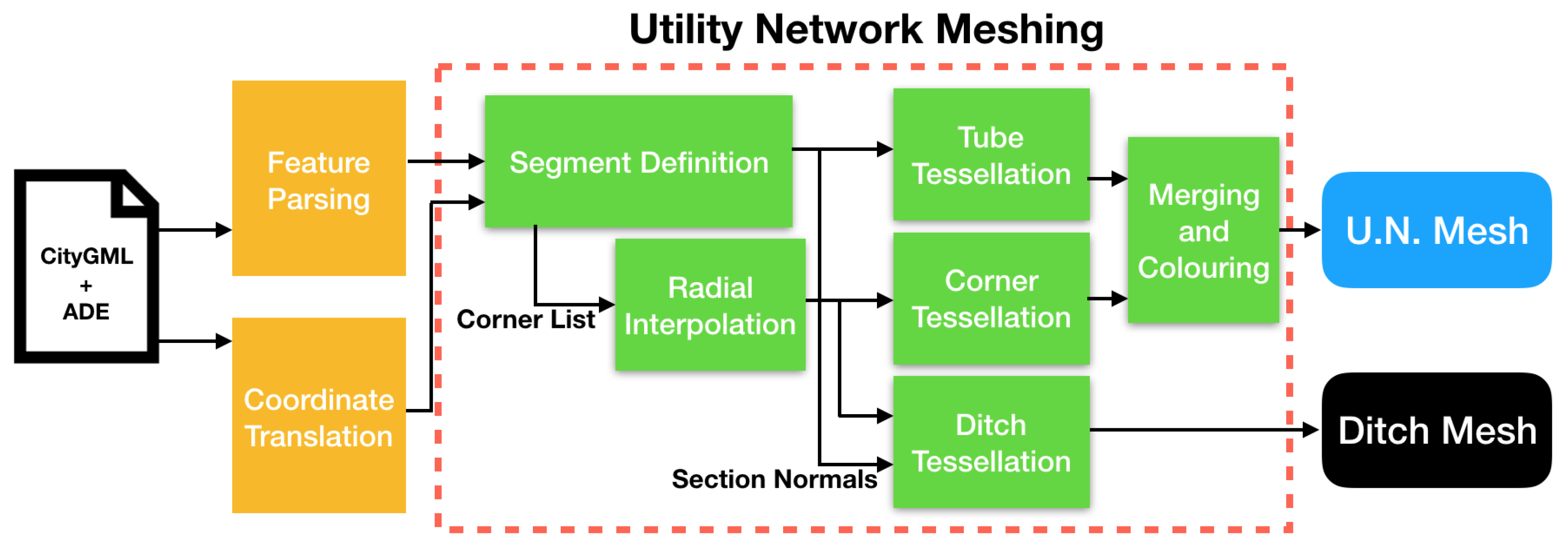
5. Geometrical Modelling and Rendering
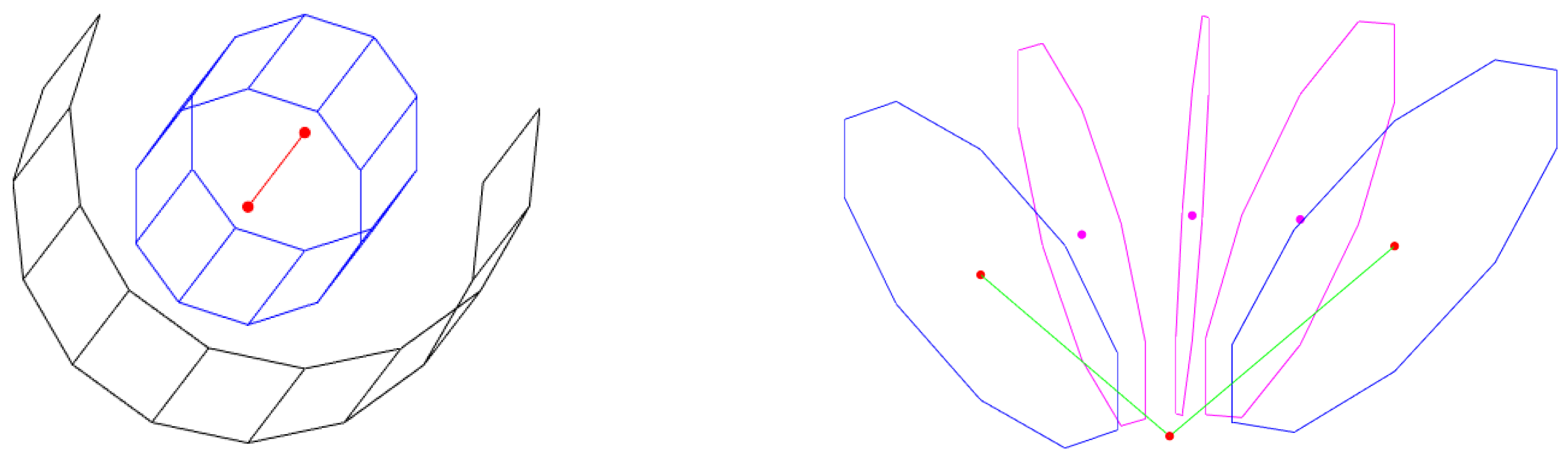
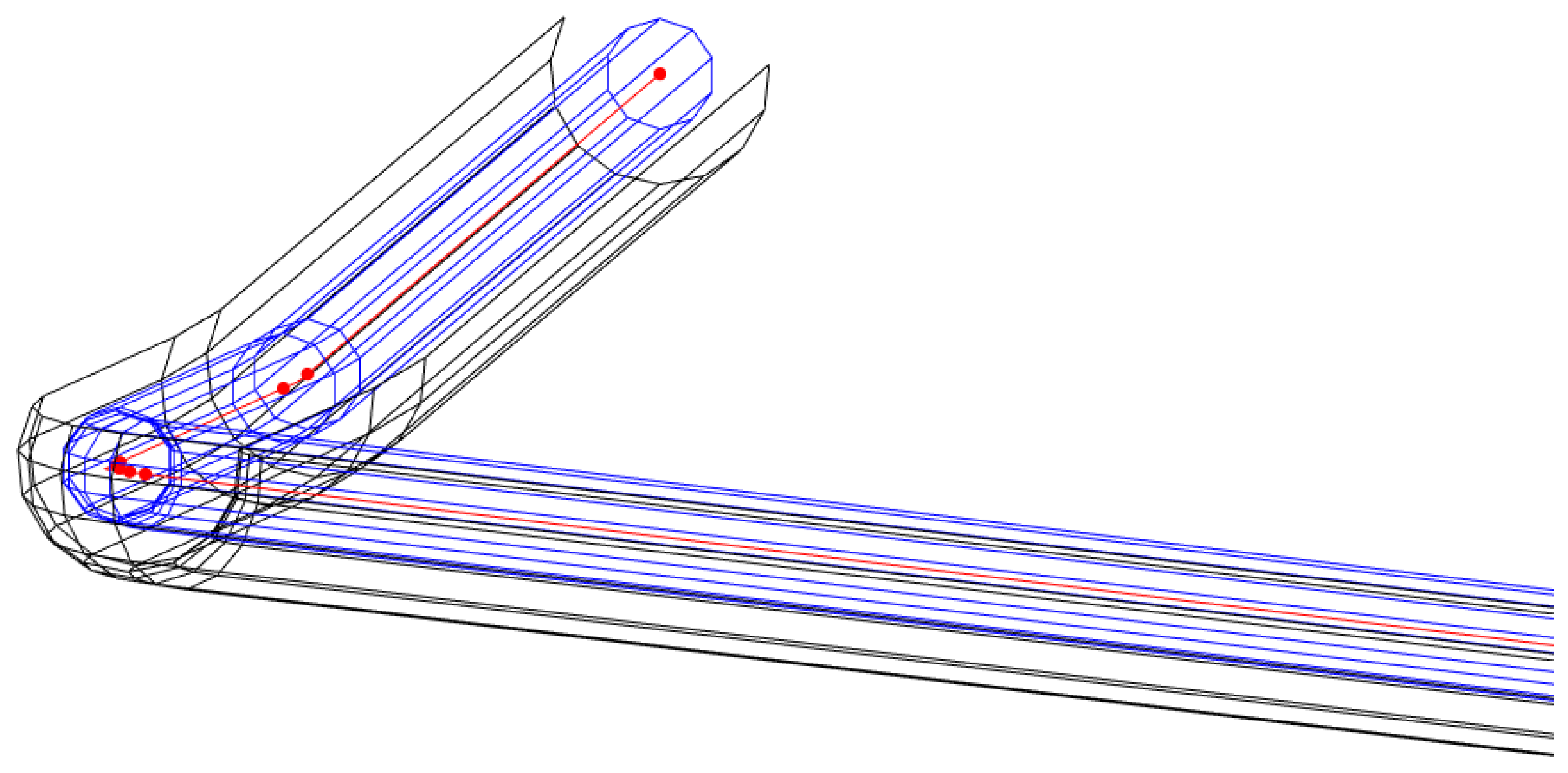
5.1. Generation of Pipes from Line-String Based Networks
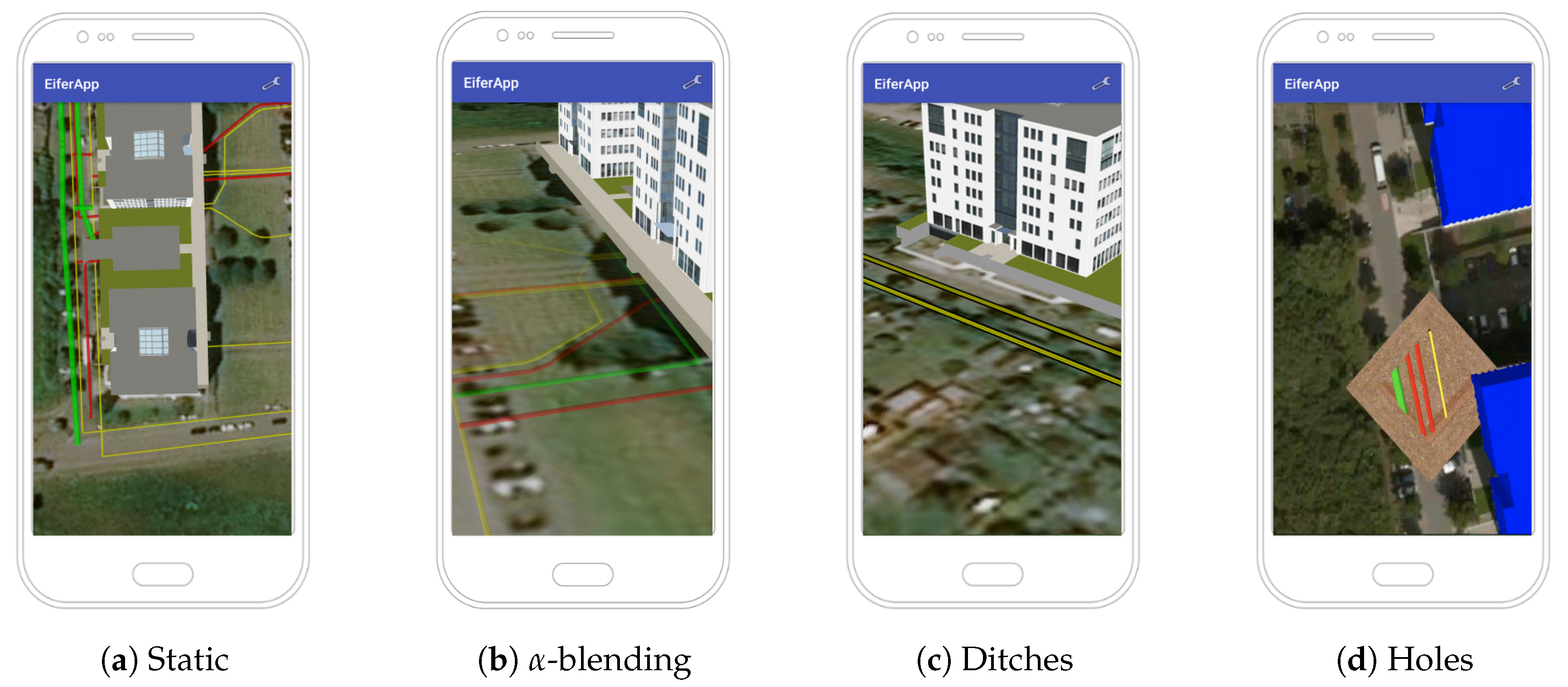
5.2. Strategies for Visualization of Underground Utilities
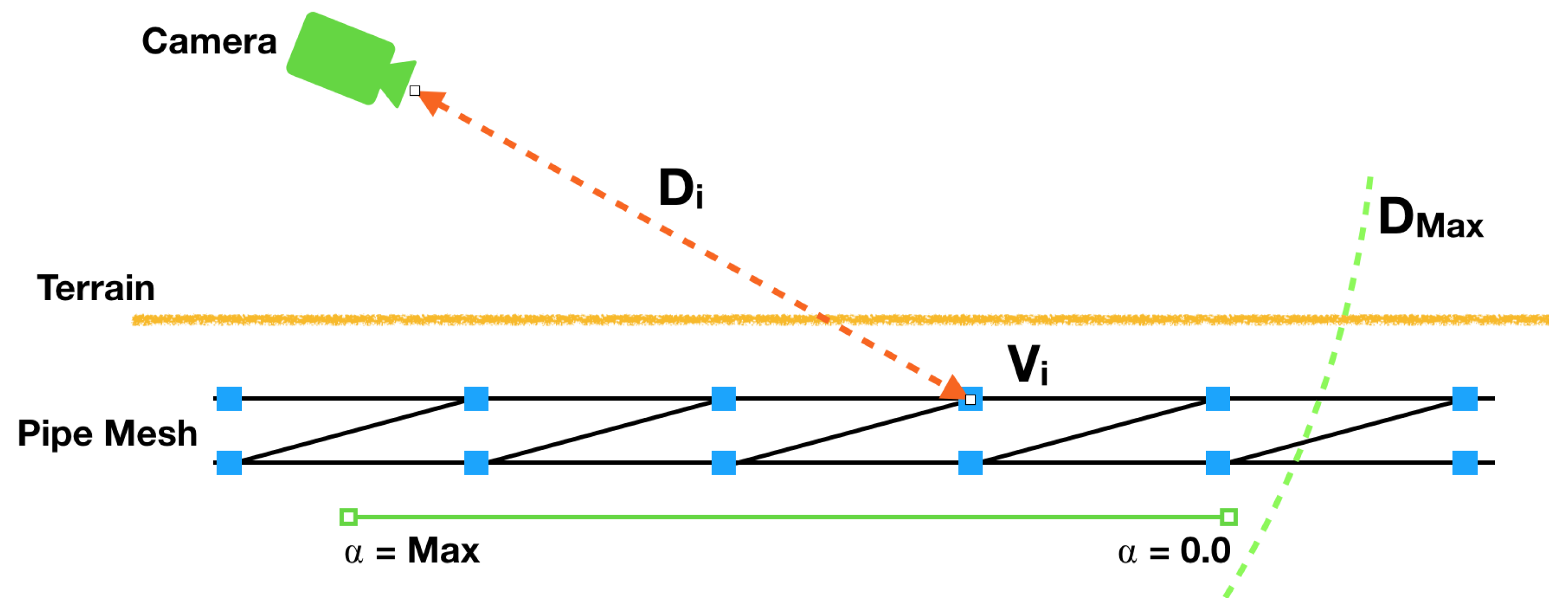
5.2.1. Variable -Blending
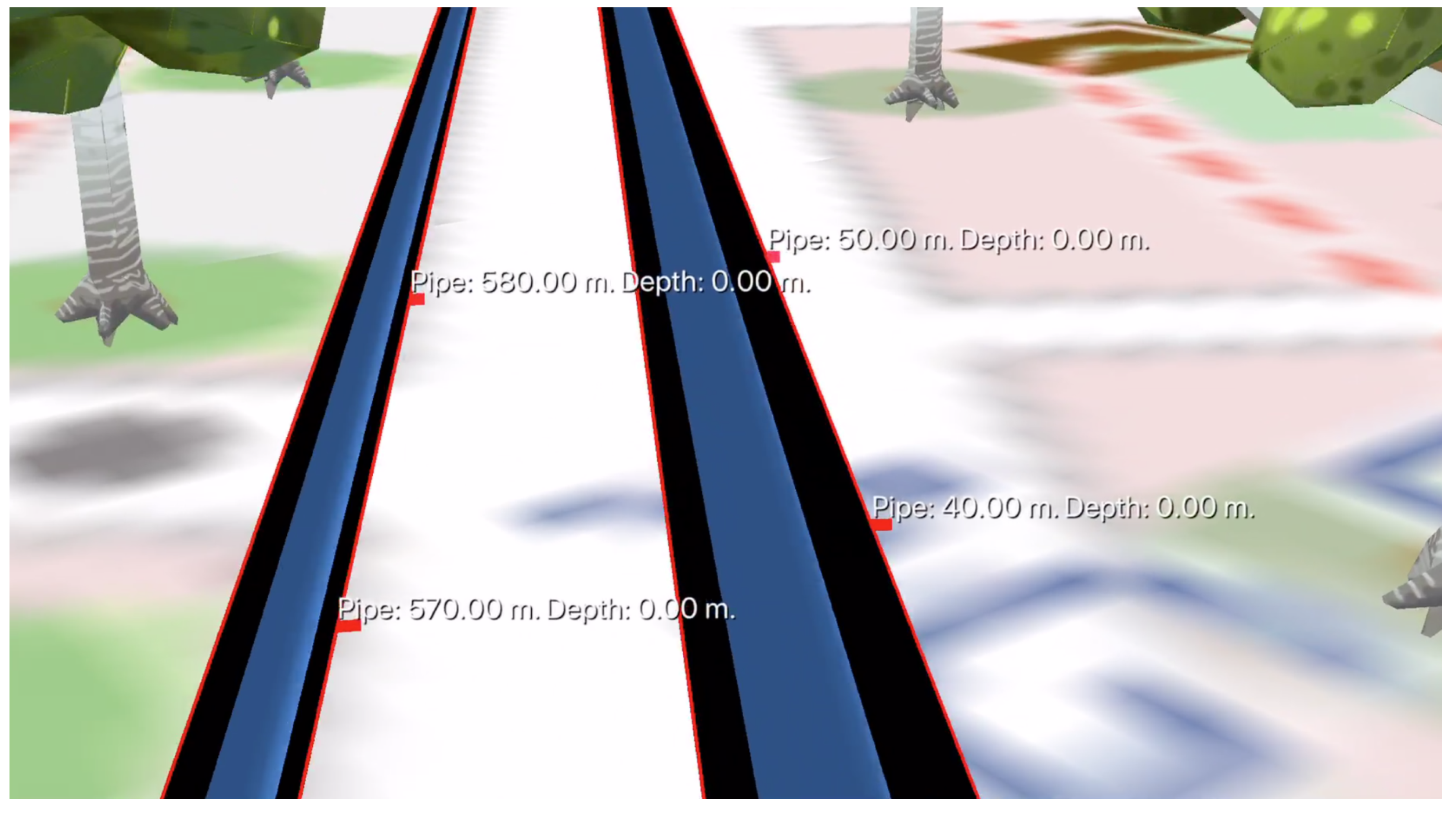
5.2.2. Visualization of Underground Pipes via Terrain Ditches
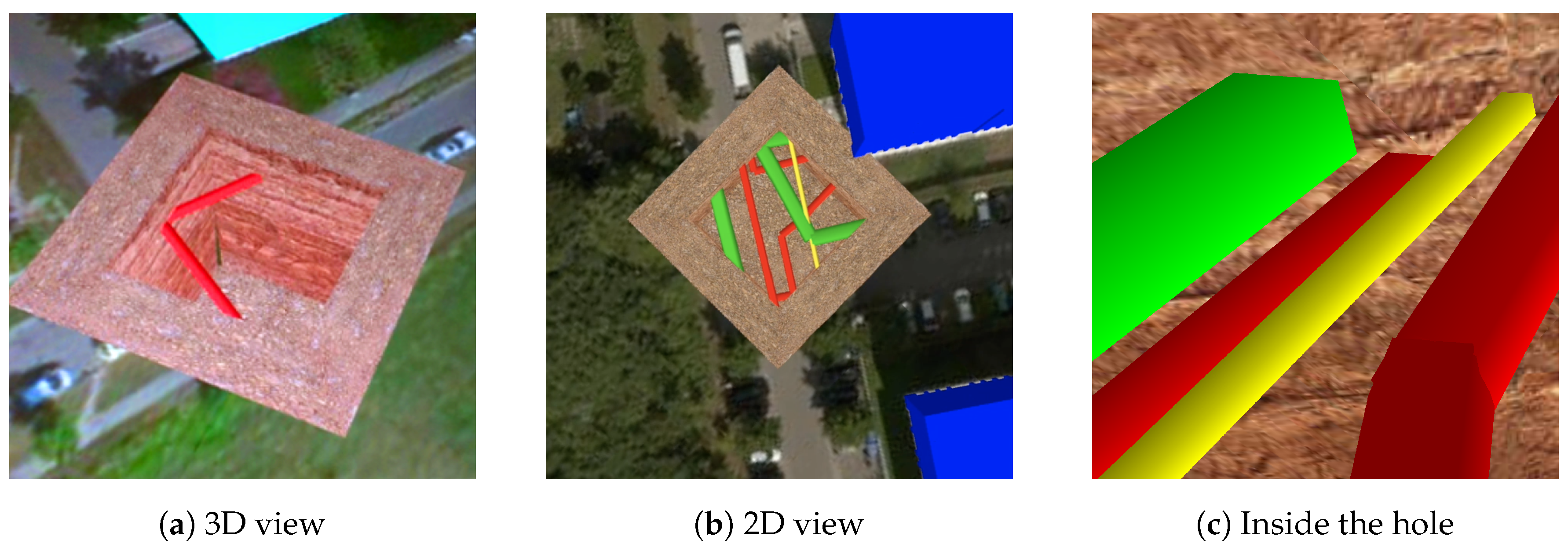
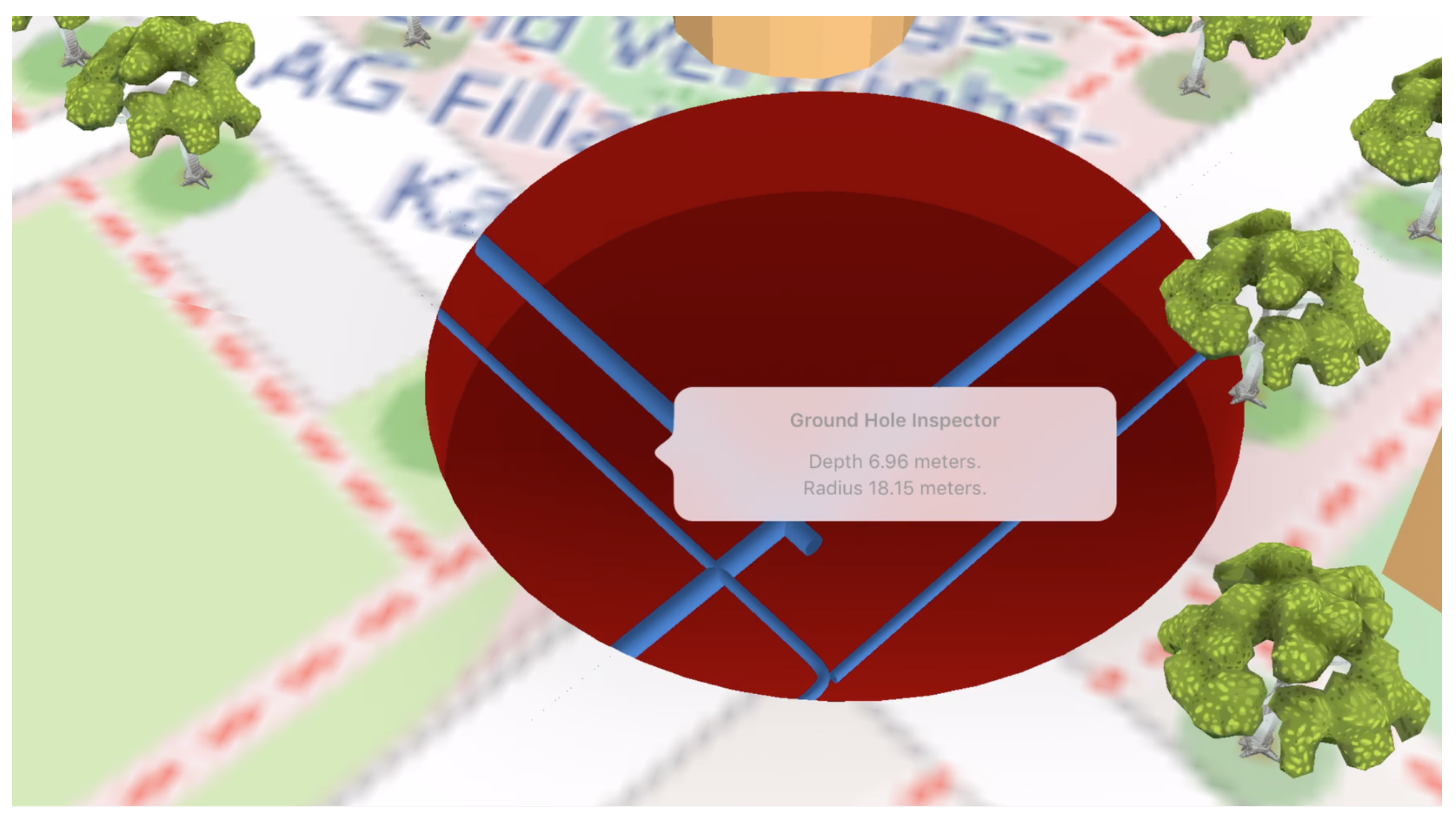
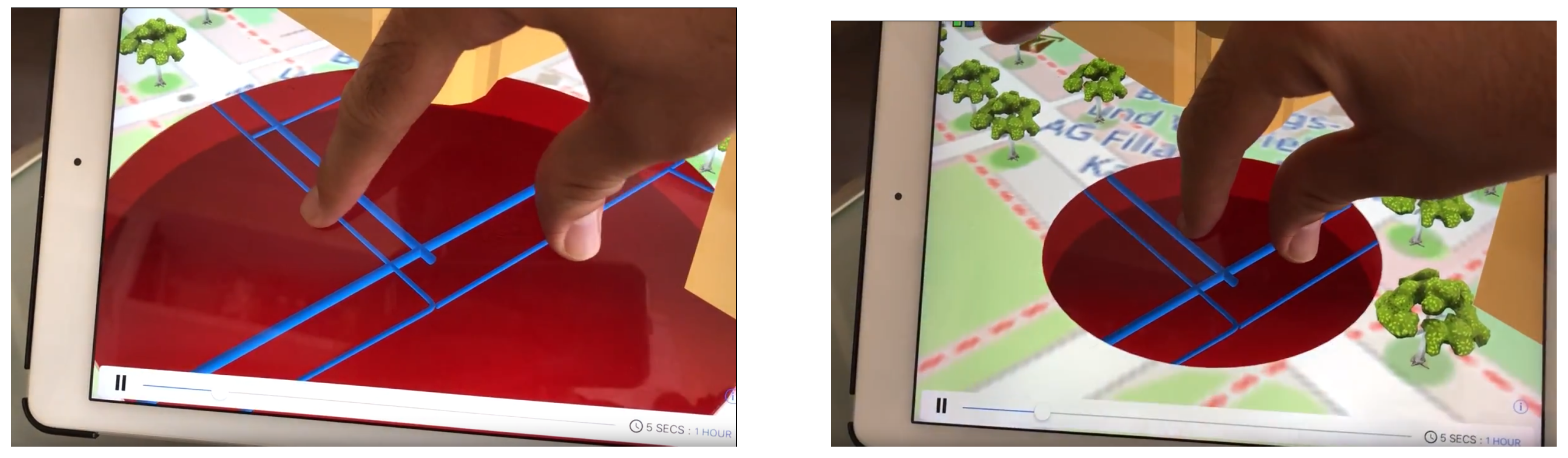
5.2.3. Excavation Tool
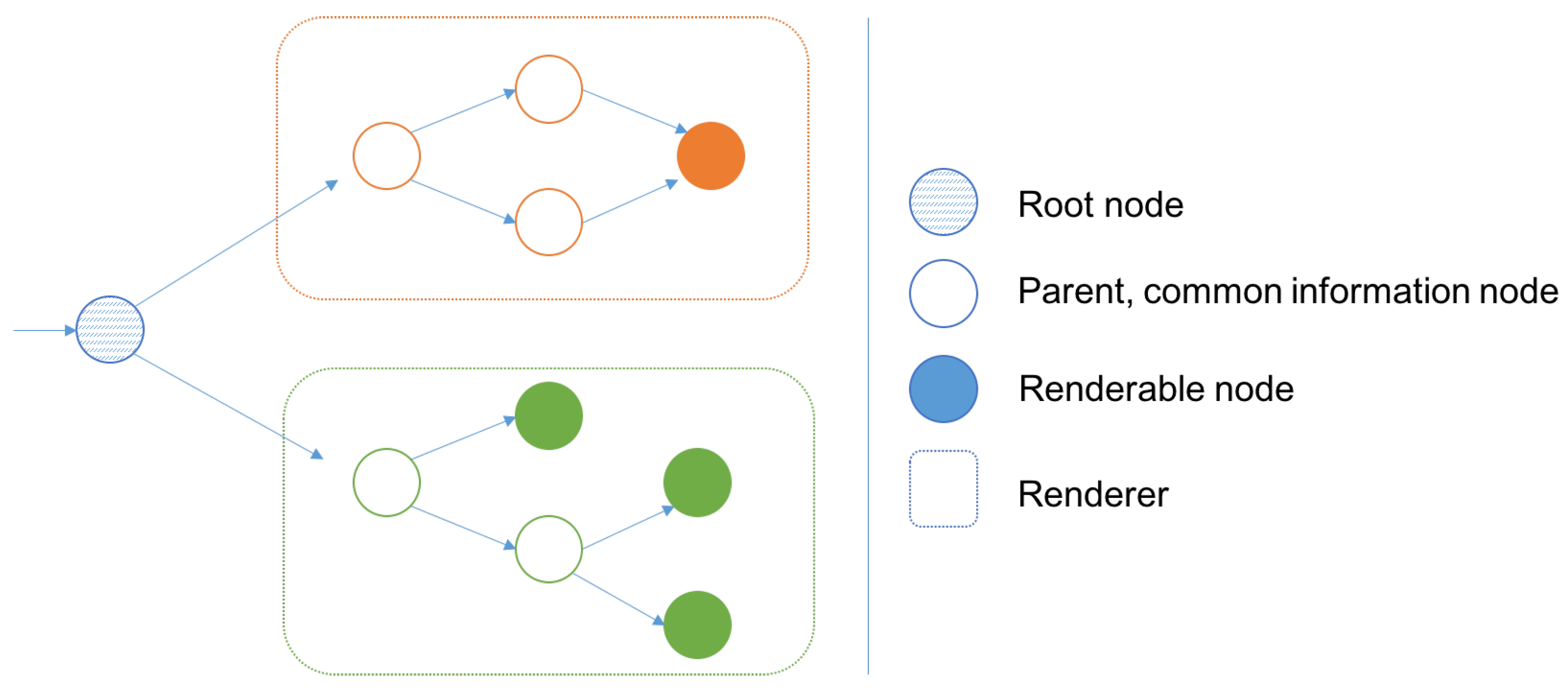
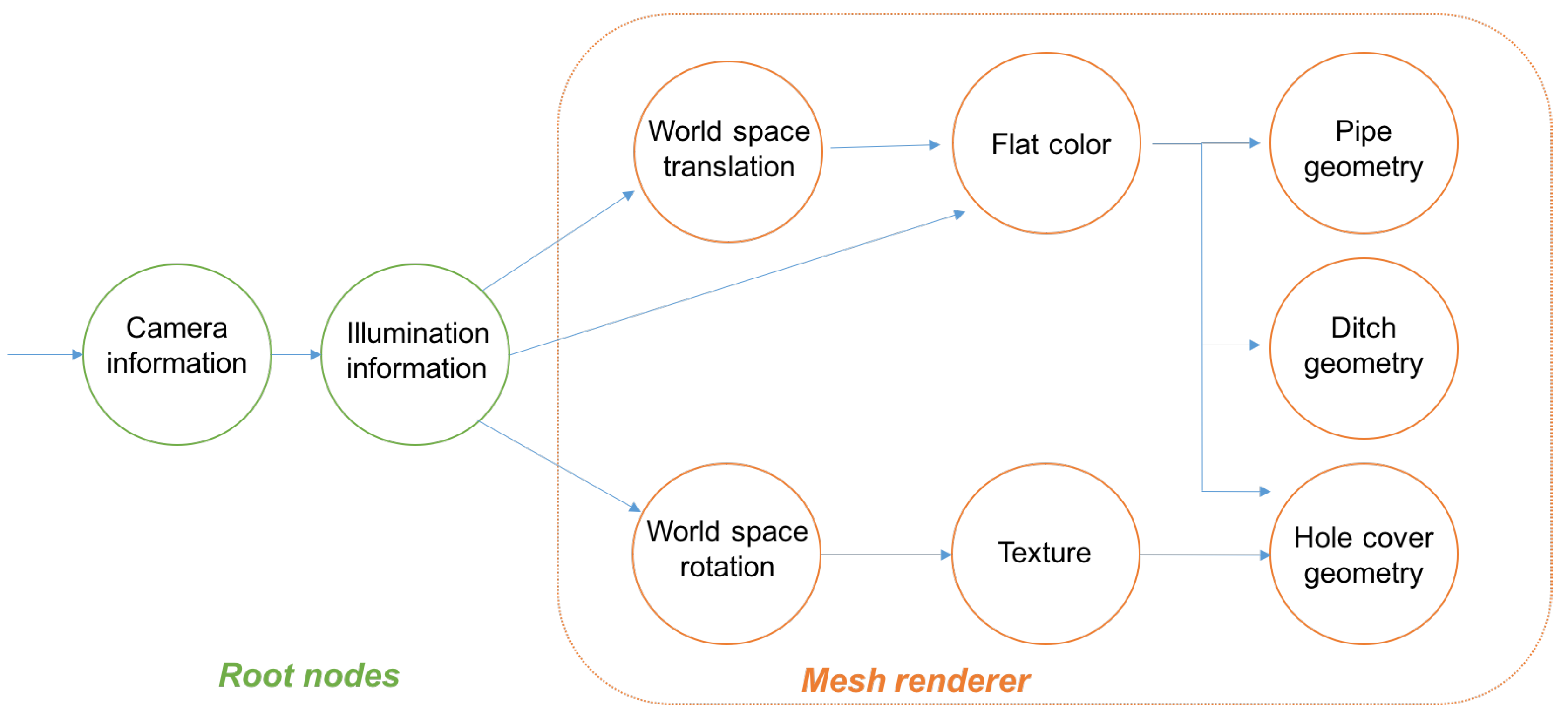
5.3. Rendering of Underground Elements
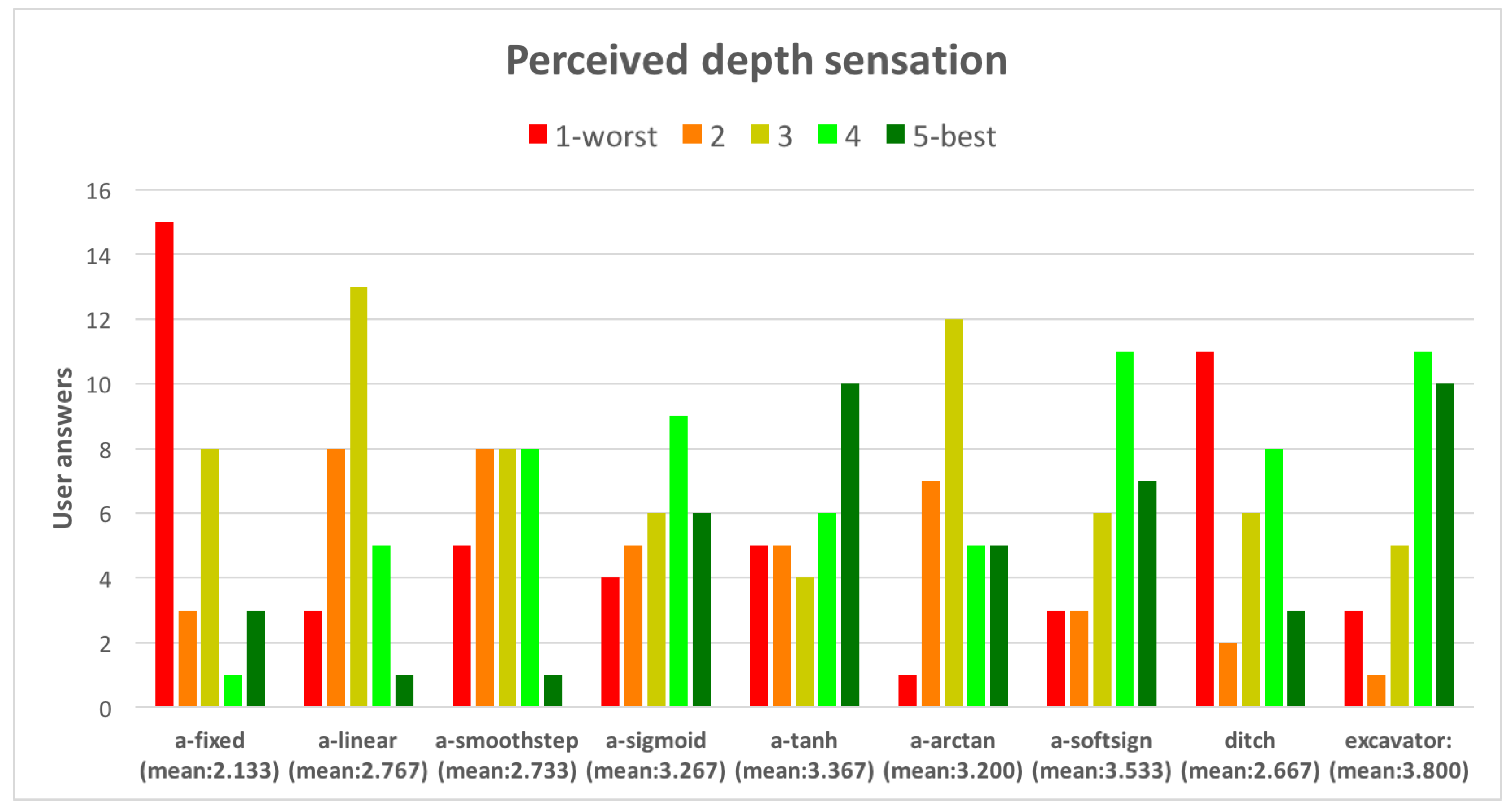
6. Experimentation and User Survey
7. Conclusions and Further Work
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A. Survey Questionnaire
- Initially, utilities are visualized in the app with the Ditch technique. Please use the fingers for navigating to a pipe of your choice. Does it look as it is placed underground? (Options: 1-2-3-4-5)
- Use the menu to change the visualization mode to Alpha with method Fixed. Please go to another pipe of your choice. Does it look as it is placed underground? (Options: 1-2-3-4-5)
- Please set now the method to Linear in the menu and navigate to another pipe of your choice. Does it look as if it is placed underground? (Options: 1-2-3-4-5)
- Please set now the method to Smoothstep in the menu and navigate to another pipe of your choice. Does it look as if it is placed underground? (Options: 1-2-3-4-5)
- Please set now the method to Sigmoid in the menu and navigate to another pipe of your choice. Does it look as if it is placed underground? (Options: 1-2-3-4-5)
- Please set now the method to Tanh in the menu and navigate to another pipe of your choice. Does it look as if it is placed underground? (Options: 1-2-3-4-5)
- Please set now the method to Arccos in the menu and navigate to another pipe of your choice. Does it look as if it is placed underground? (Options: 1-2-3-4-5)
- Please set now the method to Sigmoid in the menu and navigate to another pipe of your choice. Does it look as if it is placed underground? (Options: 1-2-3-4-5)
- Change now the visualization mode to Hole, and do a long-press over an area to excavate it and see the utilities on it. Do they look as if they are placed underground? (Options: 1-2-3-4-5)
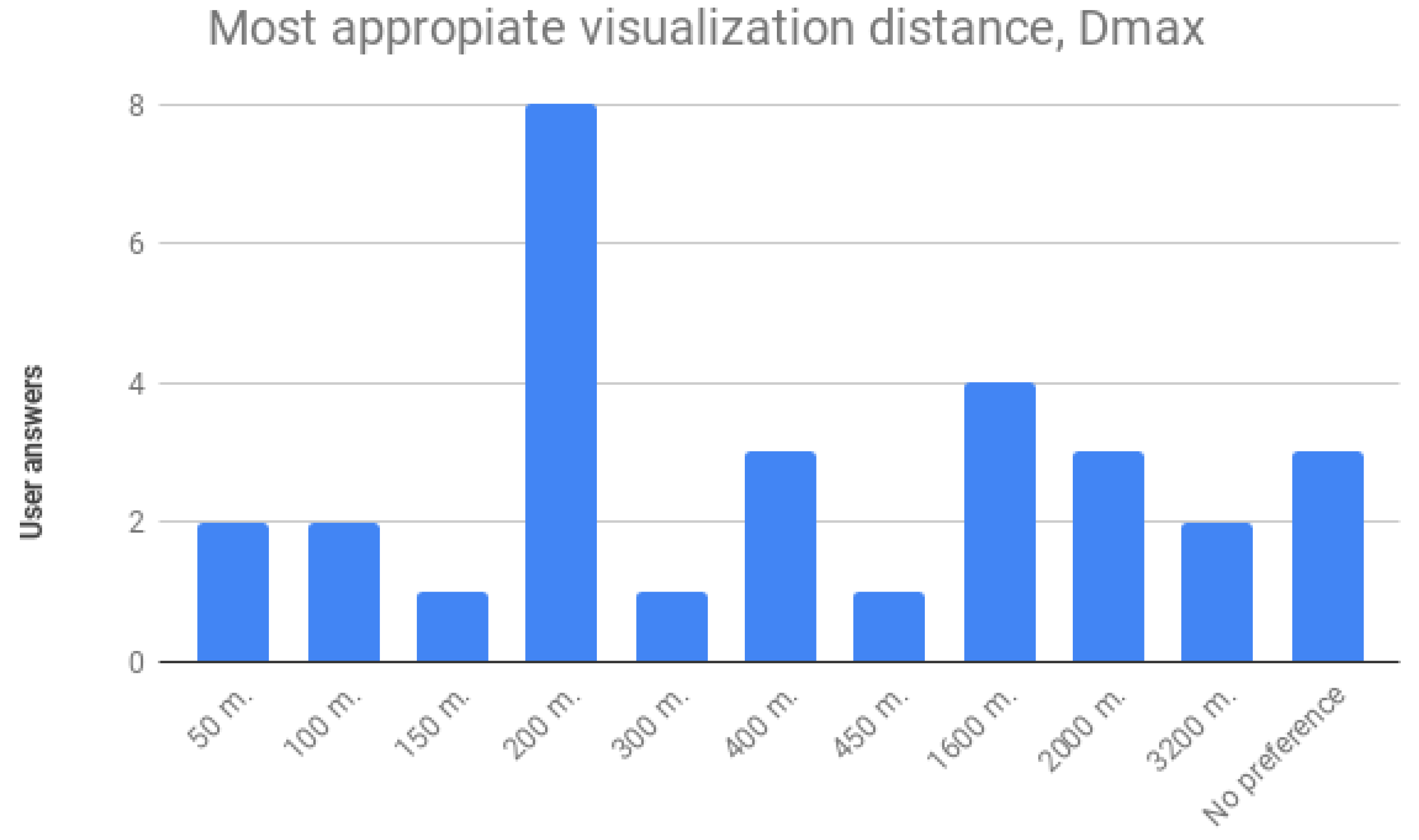
- Finally, we are looking for the best maximum distance for showing utilities in the scenario. Please set the alpha visualization mode and the linear method. Now, please test different fading distances and then use the fingers to zoom in, zoom out, move and change to 3D view. We suggest testing 50, 100, 200, 400, 800, 1600 and 3200, but you could also test a distance of your choice. Which one is, in your opinion, the most appropriate for the visualization of utilities? (Options: A number)
References
- Hojjati, A.; Jefferson, I.; Metje, N.; Rogers, C.D. Embedding sustainability criteria into pre-appraisal of underground utility for future cities. Proc. Inst. Civ. Eng.-Urban Des. Plan. 2017, 170, 258–271. [Google Scholar] [CrossRef]
- Bobylev, N.; Hunt, D.; Jefferson, I.; Rogers, C.D. Sustainable infrastructure for resilient urban environments. Adv. Undergr. Space Dev. 2013, 906–917. [Google Scholar] [CrossRef]
- Schall, G.; Zollmann, S.; Reitmayr, G. Smart Vidente: Advances in mobile augmented reality for interactive visualization of underground infrastructure. Pers. Ubiquitous Comput. 2013, 17, 1533–1549. [Google Scholar] [CrossRef]
- Becker, T.; Nagel, C.; Kolbe, T.H. Semantic 3D modeling of multi-utility networks in cities for analysis and 3D visualization. In Progress and New Trends in 3D Geoinformation Sciences; Springer: Berlin/Heidelberg, Germany, 2013; pp. 41–62. [Google Scholar]
- Sirkiä, J.; Laakso, T.; Ahopelto, S.; Ylijoki, O.; Porras, J.; Vahala, R. Data utilization at finnish water and wastewater utilities: Current practices vs. state of the art. Util. Policy 2017, 45, 69–75. [Google Scholar] [CrossRef]
- Neirotti, P.; De Marco, A.; Cagliano, A.C.; Mangano, G.; Scorrano, F. Current trends in Smart City initiatives: Some stylised facts. Cities 2014, 38, 25–36. [Google Scholar] [CrossRef]
- Wahab, S.; Chapman, D.; Rogers, C.; Foo, K.; Nawawi, S.; Abas, K. Assessing the condition of buried pipe using ground-penetrating radar (GPR). In The Malaysia-Japan Model on Technology Partnership; Springer: Berlin/Heidelberg, Germany, 2015; pp. 311–319. [Google Scholar]
- European Commission. INSPIRE Data Specification on Utility and Governmental Services—Technical Guidelines. 2019. Available online: https://inspire.ec.europa.eu/file/1518/download?token=sGDcVnQQ (accessed on 4 March 2019).
- European Commission. INSPIRE Data Specifications—Base Models—Generic Network Model. 2019. Available online: https://inspire.ec.europa.eu/file/1542/download?token=_7tV1nx7 (accessed on 4 March 2019).
- ESRI. What Are Geometric Networks? 2019. Available online: http://desktop.arcgis.com/es/arcmap/latest/manage-data/geometric-networks/what-are-geometric-networks-.htm (accessed on 4 March 2019).
- buildingSmart. IFC Overview. 2019. Available online: http://www.buildingsmart-tech.org/specifications/ifc-overview (accessed on 31 January 2019).
- Hijazi, I.; Kutzner, T.; Kolbe, T.H. Use Cases and their Requirements on the Semantic Modeling of 3D Supply and Disposal Networks. In Kulturelles Erbe erfassen und bewahren-Von der Dokumentation zum virtuellen Rundgang, 37; Wissenschaftlich-Technische Jahrestagung der DGPF: Würzburg, Germany, 2017; pp. 288–301. [Google Scholar]
- Zlatanova, S.; Rahman, A.A.; Pilouk, M. Trends in 3D GIS development. J. Geosp. Eng. 2002, 4, 71–80. [Google Scholar]
- Du, Y.; Zlatanova, S. An approach for 3D visualization of pipelines. In Innovations in 3D Geo Information Systems; Springer: Berlin/Heidelberg, Germany, 2006; pp. 501–517. [Google Scholar]
- Amin, D.; Govilkar, S. Comparative study of augmented reality SDKs. Int. J. Comput. Sci. Appl. 2015, 5, 11–26. [Google Scholar]
- Christen, M.; Clement, U.; Meyer, A. Mixed Reality Anwendungen mit 3D-Stadtmodellen; Wissenschaftlich-Technische Jahrestagung der DGPF: München, Germany, 2018; pp. 328–340. [Google Scholar]
- Zaher, M.; Greenwood, D.; Marzouk, M. Mobile augmented reality applications for construction projects. Constr. Innov. 2018, 18, 152–166. [Google Scholar] [CrossRef]
- Behzadan, A.H.; Dong, S.; Kamat, V.R. Augmented reality visualization: A review of civil infrastructure system applications. Adv. Eng. Inf. 2015, 29, 252–267. [Google Scholar] [CrossRef]
- Palmarini, R.; Erkoyuncu, J.A.; Roy, R.; Torabmostaedi, H. A systematic review of augmented reality applications in maintenance. Robot. Comput.-Integr. Manuf. 2018, 49, 215–228. [Google Scholar] [CrossRef]
- Kim, K.; Billinghurst, M.; Bruder, G.; Duh, H.B.L.; Welch, G.F. Revisiting Trends in Augmented Reality Research: A Review of the 2nd Decade of ISMAR (2008–2017). IEEE Trans. Visual. Comput. Graph. 2018, 24, 2947–2962. [Google Scholar] [CrossRef] [PubMed]
- Brum, M.R.; Rieder, R. Virtual reality applications for smart cities in health: A systematic review. In Proceedings of the 2015 XVII Symposium on Virtual and Augmented Reality (SVR), Sao Paulo, Brazil, 25–28 May 2015; pp. 154–159. [Google Scholar]
- Zhou, F.; Duh, H.B.L.; Billinghurst, M. Trends in augmented reality tracking, interaction and display: A review of ten years of ISMAR. In Proceedings of the 7th IEEE/ACM International Symposium on Mixed and Augmented Reality, Cambridge, UK, 15–18 September 2008; pp. 193–202. [Google Scholar]
- Roberts, G.W.; Evans, A.; Dodson, A.; Denby, B.; Cooper, S.; Hollands, R. The use of augmented reality, GPS and INS for subsurface data visualization. In Proceedings of the FIG XXII International Congress, Washington, DC, USA, 19–26 April 2002; pp. 1–12. [Google Scholar]
- Bane, R.; Hollerer, T. Interactive tools for virtual x-ray vision in mobile augmented reality. In Proceedings of the 3rd IEEE/ACM International Symposium on Mixed and Augmented Reality, Washington, DC, USA, 2–5 November 2004; pp. 231–239. [Google Scholar]
- Avery, B.; Sandor, C.; Thomas, B.H. Improving spatial perception for augmented reality X-ray vision. In Proceedings of the 2009 IEEE Virtual Reality Conference, Charlotte, NC, USA, 10–14 March 2007; pp. 79–82. [Google Scholar]
- Su, X.; Talmaki, S.; Cai, H.; Kamat, V.R. Uncertainty-aware visualization and proximity monitoring in urban excavation: A geospatial augmented reality approach. Visual. Eng. 2013, 1, 2. [Google Scholar] [CrossRef]
- Li, S.; Cai, H.; Kamat, V.R. Uncertainty-aware geospatial system for mapping and visualizing underground utilities. Autom. Construct. 2015, 53, 105–119. [Google Scholar] [CrossRef]
- Zhang, X.; Han, Y.; Hao, D.; Lv, Z. ARGIS-based outdoor underground pipeline information system. J. Vis. Commun. Image Represent. 2016, 40, 779–790. [Google Scholar] [CrossRef]
- olde Scholtenhuis, L.; Zlatanova, S.; den Duijn, X.; Ntarladima, A.M.; Theocharous, E. Spying the underground: Visualizing subsurface utilities’ location uncertainties with fuzzy 3D. SPOOL 2017, 4, 61–64. [Google Scholar]
- Schall, G.; Mendez, E.; Kruijff, E.; Veas, E.; Junghanns, S.; Reitinger, B.; Schmalstieg, D. Handheld augmented reality for underground infrastructure visualization. Pers. Ubiquitous Comput. 2009, 13, 281–291. [Google Scholar] [CrossRef]
- Chen, J.; Granier, X.; Lin, N.; Peng, Q. On-line visualization of underground structures using context features. In Proceedings of the 17th ACM Symposium on Virtual Reality Software and Technology, New York, NY, USA, 22–24 November 2010; pp. 167–170. [Google Scholar]
- Zollmann, S.; Grasset, R.; Reitmayr, G.; Langlotz, T. Image-based X-ray visualization techniques for spatial understanding in Outdoor Augmented Reality. In Proceedings of the 26th Australian Computer-Human Interaction Conference on Designing Futures: The Future of Design, Sydney, Australia, 2–5 December 2014; pp. 194–203. [Google Scholar]
- Lee, S.; Suh, J.; Park, H.D. BoreholeAR: A mobile tablet application for effective borehole database visualization using an augmented reality technology. Comput. Geosci. 2015, 76, 41–49. [Google Scholar] [CrossRef]
- Mirauda, D.; Erra, U.; Agatiello, R.; Cerverizzo, M. Applications of Mobile Augmented Reality to Water Resources Management. Water 2017, 9, 699. [Google Scholar] [CrossRef]
- Santana, J.M.; Wendel, J.; Trujillo, A.; Suárez, J.P.; Simons, A.; Koch, A. Multimodal location based services—Semantic 3D city data as virtual and augmented reality. In Progress in Location-Based Services 2016; Springer: Berlin/Heidelberg, Germany, 2017; pp. 329–353. [Google Scholar]
- Delmastro, C.; Lavagno, E.; Schranz, L. Underground urbanism: master plans and sectorial plans. Tunn. Undergr. Space Technol. 2016, 55, 103–111. [Google Scholar] [CrossRef]
- Li, X.; Lv, Z.; Hu, J.; Zhang, B.; Shi, L.; Feng, S. XEarth: A 3D GIS Platform for managing massive city information. In Proceedings of the 2015 IEEE International Conference on Computational Intelligence and Virtual Environments for Measurement Systems and Applications (CIVEMSA), Shenzhen, China, 12–14 June 2015; pp. 1–6. [Google Scholar]
- ESRI. What Is a Utility Network? 2019. Available online: https://pro.arcgis.com/es/pro-app/help/data/utility-network/what-is-a-utility-network-.htm (accessed on 31 January 2019).
- Kutzner, T.; Kolbe, T.H. Extending semantic 3D city models by supply and disposal networks for analysing the urban supply situation. In Lösungen für eine Welt im Wandel, Dreiländertagung der SGPF, DGPF und OVG, 36; Wissenschaftlich-Technische Jahrestagung der DGPF: Bern, Switzerland, 2016; pp. 382–394. [Google Scholar]
- Gröger, G.; Kolbe, T.H.; Nagel, C.; Häfele, K.H. OGC City Geography Markup Language (CityGML) Encoding Standard, Version 2.0; OGC: Bonn, Germany, 2012. [Google Scholar]
- Boates, I. Demonstrating Utility Network Interdependency Modelling Using the UtilityNetwork Application Domain Extension for CityGML. Master’s Thesis, Hochschule Karlsruhe Technik und Wirtschaft, Karlsruhe, Germany, 2018. [Google Scholar]
- den Duijn, X. A 3D Data Modeling Approach for Integrated Management of Below and above Ground Utility Network Features. Master’s Thesis, Delft University of Technology, Delft, Amsterdam, 2018. [Google Scholar]
- Boates, I.; Agugiaro, G.; Nichersu, A. Network modelling and semantic 3D city models: Testing the maturity of the utility network ade for citygml with a water network test case. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4, 13–20. [Google Scholar] [CrossRef]
- Den Duijn, X.; Agugiaro, G.; Zlatanova, S. Modelling below-and above-ground utility network features with the CityGML Utility Network ADE: Experiences from Rotterdam. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4, 43–50. [Google Scholar] [CrossRef]
- Kutzner, T. CityGML-UtilityNetwork-ADE Github Repository. 2019. Available online: https://github.com/TatjanaKutzner/CityGML-UtilityNetwork-ADE (accessed on 12 February 2019).
- Wendel, J.; Miguel Santana, J.; Simons, A. Semantic 3D city data as virtual and augmented reality urban Energy Modelling. GIM Int. Worldw. Mag. Geomat. 2017, 31, 30–33. [Google Scholar]
- Suarez, J.P.; Trujillo, A.; Santana, J.M.; de la Calle, M.; Gomez-Deck, D. An efficient terrain Level of Detail implementation for mobile devices and performance study. Comput. Environ. Urban Syst. 2015, 52, 21–33. [Google Scholar] [CrossRef]
- Ebert, D.S.; Musgrave, F.K.; Peachey, D.; Perlin, K.; Worley, S. Texturing & Modeling: A Procedural Approach; Morgan Kaufmann: Burlington, MA, USA, 2003. [Google Scholar]
- Verhulst, P.F. A note on population growth. Corresp. Math. Phys. 1838, 10, 113–121. [Google Scholar]
- Elliott, D.L. A Better Activation Function for Artificial Neural Networks; Technical Report; University of Maryland: College Park, MD, USA, 1993. [Google Scholar]
- Cozzi, P.; Ring, K. 3D Engine Design for Virtual Globes, 1st ed.; A. K. Peters, Ltd.: Natick, MA, USA, 2011; p. 520. [Google Scholar]
- Trujillo, A.; Suárez, J.P.; Santana, J.M.; de la Calle, M.; Gómez-Deck, D. An efficient architecture for automatic shaders management on virtual globes. In Proceedings of the 2014 Fifth International Conference on Computing for Geospatial Research and Application (COM. Geo), Washington, DC, USA, 4–6 August 2014; pp. 38–42. [Google Scholar]
- Dave, S. Opengl Programming Guide: The Official Guide To Learning Opengl, Version 2.1, 6/E; Pearson Education India: Delhi, India, 2008. [Google Scholar]
- Cozzi, P.; Riccio, C. OpenGL insights; AK Peters/CRC Press: Natick, MA, USA, 2012. [Google Scholar]
- Autodesk. Maya Render Pass Concepts and Techniques. 2019. Available online: http://images.autodesk.com/adsk/files/maya_render_pass_concepts_and_techniques_whitepaper_us.pdf (accessed on 11 February 2019).
- Becker, T.; König, G. Generalized cartographic and simultaneous representation of utility networks for decision-support systems and crisis management in urban environments. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2015, II-2/W2, 19–28. [Google Scholar] [CrossRef]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
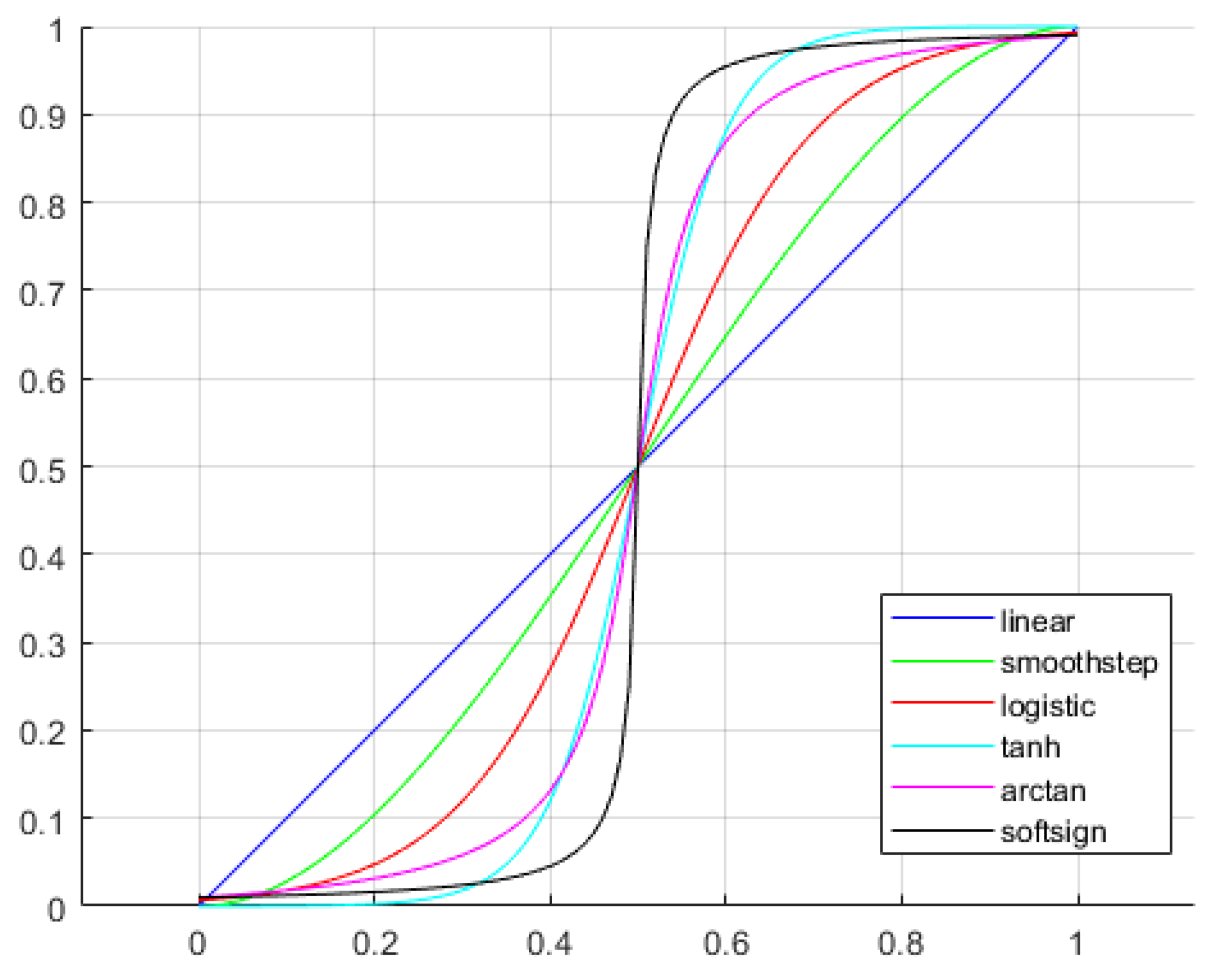
| Expression | |
|---|---|
| Fixed | 0 |
| Linear | |
| Smoothstep [48] | |
| Logistic [49] | , where |
| tanh | , where |
| arctan | , where |
| Softsign [50] | , where |
| People | Mean | Median | Standard Deviation | |
|---|---|---|---|---|
| Technical users | 17 | 3.235 | 4 | 1.393 |
| Non technical users | 13 | 1.923 | 1 | 1.256 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ortega, S.; Wendel, J.; Santana, J.M.; Murshed, S.M.; Boates, I.; Trujillo, A.; Nichersu, A.; Suárez, J.P. Making the Invisible Visible—Strategies for Visualizing Underground Infrastructures in Immersive Environments. ISPRS Int. J. Geo-Inf. 2019, 8, 152. https://doi.org/10.3390/ijgi8030152
Ortega S, Wendel J, Santana JM, Murshed SM, Boates I, Trujillo A, Nichersu A, Suárez JP. Making the Invisible Visible—Strategies for Visualizing Underground Infrastructures in Immersive Environments. ISPRS International Journal of Geo-Information. 2019; 8(3):152. https://doi.org/10.3390/ijgi8030152
Chicago/Turabian StyleOrtega, Sebastián, Jochen Wendel, José Miguel Santana, Syed Monjur Murshed, Isaac Boates, Agustín Trujillo, Alexandru Nichersu, and José Pablo Suárez. 2019. "Making the Invisible Visible—Strategies for Visualizing Underground Infrastructures in Immersive Environments" ISPRS International Journal of Geo-Information 8, no. 3: 152. https://doi.org/10.3390/ijgi8030152
APA StyleOrtega, S., Wendel, J., Santana, J. M., Murshed, S. M., Boates, I., Trujillo, A., Nichersu, A., & Suárez, J. P. (2019). Making the Invisible Visible—Strategies for Visualizing Underground Infrastructures in Immersive Environments. ISPRS International Journal of Geo-Information, 8(3), 152. https://doi.org/10.3390/ijgi8030152